Embed Size (px)
DESCRIPTION
International Journal of Mathematical Sciences
Citation preview

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1356
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
A Proposition for using Mathematical Models
Based on a Fuzzy System with Application
Rana Waleed Hndoosh Department of Software Engineering,
College of Computers Sciences &
Mathematics, Mosul University, Iraq.
Email: [email protected].
M. S. Saroa Department of Mathematics,
Maharishi Markandeshawar
University, Mullana-133207, India.
Email: [email protected].
Sanjeev Kumar Department of Mathematics, Dr. B.
R. Ambedkar University, Khandari
Campus, Agra-282002, India.
Email:[email protected].
ABSTRACT
Some mathematical models based on fuzzy set theory, fuzzy systems and neural network techniques seem very well
suited for typical technical problems. This study aims to build two different models, the Fuzzy Inference System (FIS)
and the Adaptive Fuzzy System using neural network. We have proposed a new model of a fuzzy system that is extended
from 2-dimensions to 3-dimensions, using Mamdani's minimum implication, the minimum inference system, the
Singleton fuzzifier and the Center Average Defuzzifier. Also, we have extended the theorem accuracy of the fuzzy system
to 3- dimensions along with changing the type of fuzzy inference system. We have applied these mathematical models on
real data of Washing Machine (WM) and gotten good result of both models with better accuracy when compared between
models. We have created programs for these models using MATLAB 2012b.
Keywords-Fuzzy System; FIS; ANFIS; Neural Networks; Accuracy of the Fuzzy System; Fuzzy washing machine.
1. INTRODUCTION
Fuzzy variables are processed using a system called a Fuzzy Inference System (FIS); it involves fuzzification, fuzzy
inference, and defuzzification [3], [12], [15], [20]. The reason to represent a fuzzy system in terms of a neural network is
to utilize the learning capability of neural networks to improve performance, such as adaptation of fuzzy system [15],
[17]. In the next Section, we have introduced basic concepts of fuzzy rule-base with many types of fuzzy rules [4], [8]. In
Section 3, we have explained the general concepts of the Fuzzy Inference System, that is composition based inference
and individual-rule based inference with the computational procedure of both [5], [16]. In Section 4, we have shown the
detailed mathematical formulas of the Fuzzy Inference System (FIS) types [12], [13], [15], [19], [20]. In Section 5, we
construct interfaces between the fuzzy inference system and the environment using fuzzifier and defuzzifier Models [3],
[4], [11], [14], [18]. In Section 6, we propose and construct a new model of fuzzy system that is extended from the 2-dim
to 3-dim using Mamdani's minimum implication with the minimum inference system, the Singleton fuzzifier, and Center
Average Defuzzifier, where first the Mamdani fuzzy rule is used the first time and the ST fuzzy rule is used the second
time. Additionally, we have extended the Theorem of fuzzy system accuracy for the proposed model, where this
approach requires three pieces of information in order for the modeled fuzzy system to satisfy any pre-specified degree of
accuracy [6], [10], [19]. In Section 7, we have adapted the structure of the fuzzy system using a neural network and we
have summarized the procedures to modeling a fuzzy system that depends on three layers of network step by step [1], [5],
[7], [9], [15], [16], [17]. Finally in Section 8, we have applied all the previous concepts to real application of fuzzy
washing machines (WM) [2], [6], [10], and have obtained and accurate good results for both models. We have created
programs for these models using MATLAB 2012b. Concluding remarks are given in Section 9. This work presents two
alternative modeling approaches to find the degree of cleanness of clothes dependent on the property of inputs with
concepts of the fuzzy system. The focus here is not only on how to construct the models but also on how to use these
modeling systems to interpret the results and assess the uncertainty of the models.
2. FUZZY RULE-BASE
A fuzzy rule-base consists of a set of fuzzy IF-THEN rules. Specifically, the fuzzy rule base comprises the following
fuzzy IF-THEN rules [4]:
(1)
where and are fuzzy set in and respectively, where
, and are the input and output linguistic variables of the fuzzy system respectively. Let be the
number of rules in the fuzzy rule base; that is, in Eq. (1). We call the rules in the form of (1) canonical fuzzy
IF-THEN rules because they include many other types of fuzzy rules as in [8], [16]:
a) Partial rules:
, where (2)
b) Or rules:
, (3)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1357
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
c) Statement of single fuzzy:
, (4)
d) Gradual rules, as:
The colder the , the hotter the , (5)
e) Non-fuzzy rules:
If the membership functions of and can only take values 1 or 0, then the rules (1) become non-fuzzy rules.
The fuzzy rule-base consists of a set of rules. We introduce the following concepts:
1. A set of fuzzy IF-THEN rules is complete if for any , there exists at least one rule in the fuzzy rule base, say
rule
, such that:
( ) (6)
That means, at any point in the input space there is at least one rule that "fires"; that is, the membership value of the
IF part of the rule at this point is non-zero.
2. A set of fuzzy IF-THEN rules is consistent if there are no rules with the same IF parts but different THEN parts [12].
3. A set of fuzzy IF-THEN rules is continuous if there do not exist such neighboring rules whose THEN part fuzzy sets
have empty intersection. That means the input-output behavior of the fuzzy system should be smooth.
3. GENERAL CONCEPTS OF FUZZY INFERENCE SYSTEM
In a fuzzy inference system, fuzzy logic principles are used to combine the fuzzy IF-THEN rules in the fuzzy rule base
into a mapping as:
(7)
There are two ways to infer with a set of rules: composition based inference and individual-rule based inference. We now
show the details of these two ways; In composition based inference, all rules in the fuzzy rule base are combined into a
single fuzzy relation in , which is then viewed as a single fuzzy IF-THEN rule. There are two opposite arguments
for what a set of rules should mean. The first one views the rules as independent conditional statements [3], [4]. If we
accept this view, then a reasonable operator for combining the rules is union. The second one views the rules as strongly
coupled conditional statements. If we adapt this view, then we should use the operator intersection to combine the rules.
We now show the details of these two schemes:
Let
be a fuzzy relation in which represents the fuzzy IF-THEN rule (1); that is,
We know that
is a fuzzy relation in defined by:
(8)
where represents any t-norm operator. The implication
is defined according to various implications.
If we accept the first view of a set of rules, then the rules in the form of (1) are interpreted as a single fuzzy relation
defined by:
⋃
(9)
This combination is called the Mamdani combination. If we use the symbol to represent the s-norm (s-norm is used to
represent a union of two fuzzy sets), then (9) can be rewritten as:
(10)
For the second view of a set of rules, the fuzzy IF-THEN rules of (1) are explained as a fuzzy relation ,
which is defined as:
(11)
or equivalently,
⋂
(12)
where denotes t-norm (t-norm is used to represent an intersection of two fuzzy sets). This combination is called the
Godel combination. Let be an arbitrary fuzzy set in X and be the input to the fuzzy inference system FIS. Then, by
viewing as a single fuzzy IF-THEN rule and using the generalized rule that is defined as:
{
} (13)
where is a fuzzy set, which represents the antecedent can be any operator and fuzzy relation ,

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1358
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
which represents the antecedent , a fuzzy set , which represents the consequence .
Then we get the output of the FIS as:
{
} (14)
when we use the Mamdani combination t-norm operator, or as:
{
} (15)
when we use the Godel combination s-norm operator.
In summary, the computational procedure of the composition based inference is given as follows [5], [8], [20]:
Step1: For the fuzzy IF-THEN rules in the form of (1), determine the membership functions
according to (8).
Step2: View
as the in the implications, and determine
according to any one of implications.
Step3: Determine
according to (10) or (11).
Step4: For given input , the FIS gives output according to (14) or (15).
In individual-rule based inference, each rule in the fuzzy rule base determines an output fuzzy set and the output of the
whole fuzzy inference system is the combination of the individual fuzzy sets. The combination can be taken either by
union or by intersection. The computational procedure of the individual-rule based inference is summarized as follows:
Steps1 and2: Same as the Steps 1 and 2 for the composition based inference.
Step3: For given input fuzzy set , compute the output fuzzy set for each individual
according to the
generalized rule (13), that is,
{
} (16)
Step4: The output of the FIS is the combination of the fuzzy sets {
} either by union, that is,
(17)
or by intersection, that is,
(18)
where and denote s-norm and t-norm operators, respectively.
In fuzzy inference the decision is based on the input information and the knowledge in the form of rules. The inference
model is classified based on the form of the consequence. There are two types of fuzzy rules:
1. Mamdani fuzzy rules:
If the rule has fuzzy suggestions combined by fuzzy connectives both in the antecedent and in the consequence, then it
is called a Mamdani fuzzy rule, and denoted by (1). The fuzzy inference of the Mamdani fuzzy rule is done as follows.
First, the truth value of the rule is evaluated depending on the fuzzy connections (and/or) in the IF part (antecedent).
Since our model has “and” only, then the truth value evaluation is done by [4]:
(
*, (19)
Then the fuzzy set of the output is obtained depending on the truth value and the fuzzy set of the consequence by the
t-norm (min). The fuzzy inference produces the fuzzy set of output by:
( ) . (20)
The consequences of all the rules are aggregated in the final consequence by the s-norm (max) as:
, (21)
where is the number of the rules and are functions of the inputs.
2. Sugeno fuzzy rules:
When the consequence of the rule is a linear function of the inputs, then it is called a Sugeno fuzzy rule. The
consequent of (1) becomes:
(22)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1359
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
The output of the Sugeno rule is a crisp value of the function. The final output of the fuzzy inference is obtained by a
weighted mean as:
∑
∑
(23)
where is the number of the rules and is the truth value of the antecedent got by (19).
4. TYPES OF FUZZY INFERENCE SYSTEMS We now show the detailed formulas of a number of FIS that are commonly used in fuzzy systems [1], [11], [13].
1. Product Inference System: In product inference system, we use:
(i) Individual rule-based inference with union combination (17),
(ii) Mamdani's product implication,
, (24)
(iii) Algebraic product for all the t-norm operators and max for all the s-norm operators. Specifically, from (16),
(17), (24), and (8), we obtain the product inference system as
∏
(25)
That is, given fuzzy set , the product inference system gives the fuzzy set .
2. Minimum Inference System: In minimum inference system, we use:
(i) Individual rule-based inference with union combination (17),
(ii) Mamdani's minimum implication,
(26)
(iii) min for all the t-norm operators and max for all the s-norm operators.
Specifically, from (16), (17), (26), and (8) we have
[
(
*] (27)
That is, given fuzzy set , the minimum inference system gives the fuzzy set according to (27).
3. Lukasiewicz Inference System: In Lukasiewicz inference system, we use:
(i) Individual rule-based inference with intersection combination (18),
(ii) Lukasiewicz implication:
(28)
(iii) min for all the t-norm operators.
Specifically, from (18), (16), (28) and (8), we get:
*
(
)+
(
[ (
(
( )) +])
{
( (
( )) +} (29)
That is, for given fuzzy set , the Lukasiewicz inference system gives the fuzzy set .
4. Zadeh Inference System: In Zadeh inference system, we use:
(i) individual rule-based inference with intersection combination (18).
(ii) Zadeh implication:
[ ( ) ] (30)
(iii) min for all the t-norm operators. Specifically, from (18), (16), (30), and (8) we obtain:
{ [ ( (
*
( ))]} (31)
5. Dienes-Rescher Inference System: In Dienes-Rescher inference system, we use:
(i) The same operations as in the Zadeh inference system.
(ii) Dienes-Rescher implication.
(32)
(iii) Min for all the t-norm operators. Specifically, we obtain from (18), (16), (32), and (8) that:
, * (
( ) )+- (33)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1360
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
5. FUZZIFIER AND DEFUZZIFIER MODELS
In most applications the input and output of the fuzzy system are real valued numbers. Then we must construct interfaces
between the fuzzy inference system and the environment [3], [11], [14], [18]. The interfaces are the fuzzifier and
defuzzifier.
5.1. The Fuzzifier
The fuzzifier is defined as:
(34)
There are some criteria in designing the fuzzifier such as the following:
a. The fuzzifier should consider the fact that the input is at the crisp point , that is, the fuzzy set should have large
membership value at .
b. If the input to the fuzzy system is corrupted by noise, then it is desirable that the fuzzifier should help to suppress the
noise.
c. The fuzzifier should help to simplify the computations involved in the fuzzy inference system.
We now propose three types of fuzzifiers:
(i) Singleton fuzzifier:
The Singleton fuzzifier mapping is defined as:
where is a real-valued point and is a fuzzy Singleton, that is:
{
, (35)
(ii) Gaussian fuzzifier:
The Gaussian fuzzifier mapping is defined as:
is a fuzzy set,
which has the following Gaussian membership function:
( (
)
* ( (
)
* (36)
where are positive parameters and the t-norm is usually chosen as an algebraic product or min.
(iii) Triangular fuzzifier:
The triangular fuzzifier mapping is defined as:
is a fuzzy set,
which has the following triangular membership function:
,(
| |
) (
| |
) |
|
(37)
where are positive parameters and the t-norm is usually chosen as an algebraic product or min.
5.2. The Defuzzifier
The defuzzifier is defined as: ,
where is the output of the fuzzy inference system, the crisp point. The task of the defuzzifier is to
specify a point in that best represents the fuzzy set . For all the defuzzifiers, we assume that the fuzzy set is
obtained from one of the five fuzzy inference systems in the last section, that is, is given by (25), (27), (29), (31), or
(33) [3], [8]. From these equations we see that is the union or intersection of individual fuzzy sets.
We now propose three types of defuzzifiers:
(i) The Center of Gravity Defuzzifier:
The Center of Gravity Defuzzifier specifies the as the center of the area covered by the membership function of ,
that is:
∫
∫
(38)
where∫
the conventional integral.
In fact, the membership function is usually irregular and therefore the integrations in (38) are difficult to
compute. The next defuzzifier tries to solve this problem with a simpler formula:
(ii) The Center Average Defuzzifier:
Because the fuzzy set is the intersection or union of fuzzy sets, a good approximation of (38) is the weighted
average of the centers of the fuzzy sets, where the weights equal the heights of the corresponding fuzzy sets.

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1361
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Specifically, let be the center of the fuzzy set and be its height. Then, the Center Average Defuzzifier
determines as:
∑
∑
(39)
The center average defuzzifier is the most commonly used defuzzifier in fuzzy systems. It is computationally simple
and small changes in result in small changes in .
(iii) The Maximum defuzzifier:
The maximum defuzzifier chooses the as the point in Y at which satisfies its maximum value. Define the set
as:
{ | } (40)
that is, is the set of all points in at which satisfies its maximum value. The maximum defuzzifier
defines as an arbitrary element in , that is:
(41)
If contains a single point, then is uniquely defined. If contains more than one point, then we may
still use (40) or use the smallest of maxima, the largest of maxima, or the mean of maxima defuzzifiers. Specifically,
the smallest of maxima defuzzifier gives:
{ }, (42)
the largest of maxima defizzifier gives:
{ }, (43)
and the mean of maxima defuzzifier is defined as:
∫ ( )
∫ ( ) (44)
where∫ ( )
is the usual integration for the continuous part of and is the summation for the discrete part of
The maximum defuzzifier is computationally simple, But small changes in may result in large changes in
6. PROPOSAL OF A NEW MODEL OF A FUZZY SYSTEM ON 3-DIMENSIONS
In this section, we have proposed a new model of a fuzzy system, that is extended from 2-dim to 3-dim [20]. Let . The general membership function of fuzzy set is a continuous function in given by:
{
(45)
where is a non-decreasing function is a non-increasing
function . If the universe of discourse is bounded, then are finite numbers. General membership
functions (MFs) include many commonly used MF as specia1 cases as:
(46)
then the general MF become the trapezoid MFs. If , we get the triangular MF; a triangular MF is denoted
as .
If fuzzy sets then they are called:
1. Complete on if for any , there exists such that .
2. Consistent on for some implies that for all
3. Normal, consistent and complete with general MFs. ( ). If then
In the next section, we model a particular type for washing machine of fuzzy systems that have some nice properties. We
consider three-input fuzzy systems; however, the approach and results are all valid for general N-inputs fuzzy systems.
We first specify the model.
6.1 The Proposed Model Let be defined as , that is a function on the compact set and
the analytic formula of be unknown. Suppose that for any , we can obtain . Our task is to model a fuzzy
system that approximates .
We now model such a fuzzy system in a step-by-step manner [4], [11].

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1362
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Step 1:
Define fuzzy sets
[ ] which are normal, consistent, and complete with triangular
membership functions (
)
(
) and
with
. Define:
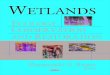
Fig.1 shows an application model with .
Step 2:
Construct fuzzy IF-THEN rules in the following form:
(47)
where and the center of the fuzzy set , denoted by
, is chosen as:
, (48)
This is the case when (47) depends on the Mamdani fuzzy rule and the antecedent of our model is connected by “and”.
Only then, from (19), the truth value evaluation is given by:
(
).
From (20) the fuzzy inference produces the fuzzy set of output by:
( ) ,
The consequences of all the rules are aggregated in the consequences by the max function as:
,
Fig. 1: An application of the fuzzy sets defined in step1 of the model procedure.
But, when the consequence of the rule is a linear function (that is means the fuzzy rule is Sugeno fuzzy rule) then the
output of the Sugeno rule depends on,
where is linear function base on that is defined as:
, (49)
and parameters can be computed by the least square model that is explained in the next section.
𝒆𝟏𝟏 𝒆𝟏
𝟐 𝒆𝟏𝟑 𝒆𝟏
𝟒 𝒆𝟏𝟓
𝒆𝟐𝟏
𝒆𝟐𝟐
𝒆𝟐𝟑
𝒆𝟐𝟒
𝒆𝟐𝟓
𝒆𝟑𝟏
𝒆𝟑𝟐
𝒆𝟑𝟏𝒆𝟑
𝟏
𝑨𝟑𝟏
𝑨𝟑𝟐
𝑨𝟑
𝟏
𝑨𝟏𝟏
𝑨𝟏𝟐
𝑨𝟏
𝟑
𝑨𝟏
𝟒
𝑨𝟏
𝟓
𝑨𝟐𝟏
𝑨𝟐𝟐
𝑨𝟐𝟑
𝑨𝟐𝟒
𝑨𝟐𝟓
𝒙𝟏
𝒙𝟐
𝒙𝟑

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1363
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Step3:
Constructing the fuzzy system from the rules of (48) using Mamdani's minimum implication (26) with
the minimum inference system (27), the Singleton fuzzifier (35), and the Center Average Defuzzifier (39), we get:
∑ ∑ ∑ (
)
∑ ∑ ∑ (
)
(50)
Since the fuzzy sets
are complete, at every there exist such that:
(
) .
Hence, the fuzzy system (50) is well defined, that is, its denominator is always nonzero.
From step2, we see that the IF parts (antecedent) of the rules (48) constitute all the possible combinations of the fuzzy
sets defined for each input variable. So, if we generalize the model procedure to N-input fuzzy systems and define N
fuzzy sets for each input variable, then the total number of rules is that is, by using this design method, the number of
rules increases exponentially with the dimension of the input space.
The final observation of the model procedure is that we must know the values of
since (
)can be arbitrary points in ; this is equivalent to say
that we need to know the values of .
In the second part of this section, we explain the accuracy of the modeled above on the unknown function . We
have extended accuracy of the fuzzy system from 2-dim to 3-dim as well as changed the type of fuzzy inference system
to a minimum inference system to suit our application [4], [19], [20].
6.2 Theorem1(The Fuzzy System Accuracy for the Proposed Model)
Let be the fuzzy system in (50) and be the unknown function in (48). If is continuously differentiable
on , then:
‖ ‖ ‖
‖
‖
‖
‖
‖
(51)
where the infinite norm ‖ ‖ is defined as: ‖ ‖ | | |
|
Proof:
Let
where
. Since[ ]
⋃
⋃ ⋃
then we get:
⋃ ⋃ ⋃
(52)
which implies that for any , there exists such that .
Now suppose ,that is
and
.
Since the fuzzy sets
are normal, consistent and complete, at least one and at most three
are
nonzero for . From the definition of , these three possible nonzero
are
and
, the two possible nonzero
are
.
Similarly, the two possible nonzero are
are
and
. Hence, the fuzzy
system of (52) is simplified to:
∑ ∑ ∑ (
)
∑ ∑ ∑ (
*
From Eq. (48), we get:
∑ ∑ ∑
[ .
/
∑ ∑ ∑ .
/
]
(
) (53)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1364
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
∑ ∑ ∑ 0 (
)
∑ ∑ ∑ (
)
1
(54)
We have:
| | ∑ ∑ ∑ [ (
)
∑ ∑ ∑ (
*
]
| (
)|
| (
)| (55)
From the Mean Value model, we can write (55) as:
| |
(‖
‖
| | ‖
‖
| | ‖
‖
| |* (56)
Since which means that
, we have that
| | |
| | | |
| | | |
| for ,
and
Then (56) becomes:
| | ‖
‖
|
| ‖
‖
|
| ‖
‖
|
| (57)
Since ‖ ‖
| | then ‖ ‖
| |, we get:
‖ ‖ ‖
‖
|
| ‖
‖
|
| ‖
‖
|
|
‖ ‖ ‖
‖
‖
‖
‖
‖
(58)
From (57) we can conclude that fuzzy systems in the form of (50) are
Specifically, since ‖
‖ ‖
‖ ‖
‖are finite numbers for any given we can choose and small
enough such that‖
‖
‖
‖
‖
‖
. Hence from (51) we have:
| | ‖ ‖
From (58) we see that in order to model a fuzzy system with a pre-specified accuracy, we must know the bounds of the
derivatives of with respect to , that is, ‖
‖
‖
‖
‖
‖
. In the model process, we need to
know the value of
(
) .
Therefore, this approach requires these three pieces of information in order for the modeled fuzzy system to satisfy any
pre-specified degree of accuracy.
7. MODEL OF AN ADAPTIVE FUZZY SYSTEM USING A NEURAL NETWORK
In this section, we adapt the structure of the fuzzy system that is specified first with the structure of some parameters that
are free to change. Then these free parameters are determined according to the input-output pairs [1], [17]. First, we
specify the structure of the fuzzy system to be modeled [15]. Here we choose the fuzzy system with a minimum inference
system, a Singleton fuzzifier, a Center Average Defuzzifier, and a Triangular MF, given by:
∑ (
( ))
∑ (
( ))
∑ 0 . ( (
+ +/1
∑ 0 . ( (
+ +/1
(59)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1365
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
where I is fixed, and
are free parameters. The fuzzy system (59) has not been modeled because the
parameters
are not specified. To determine these parameters in some optimal manner, it is helpful to
represent the fuzzy system of (59) as a feed-forward network. Specifically, the mapping from the input
to the output can be performed according to the following operations: first, the input is passed through a
minimum triangular operator to become [20]:
(
(
* *; then the are passed through a summation operator and a weighted summation
operator to get:
∑ and ∑
; finally, the output of the fuzzy system is computed as ⁄ . This three-stage
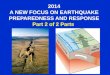
operation is shown in Fig.2 as a three layer feed forward network.
We now summarize the procedures to model a fuzzy system that depends on three layers of network.
Step1: Structure specification and initial parameters
Select the fuzzy system (59) and determine the . The larger results more parameters and in more computation, but gives
better accuracy. Specify the initial parameters
. Then the initial fuzzy system becomes as in
(60). These initial parameters may be determined according to the linguistic rules from human experts as in our
application.
∑ ∑ ∑ [ ( . .
/ /,]
∑ ∑ ∑ [ ( . .
/ /,]
(60)
Fig.2: Network representation of the fuzzy system.
Step2: Calculating the outputs of the fuzzy system.
For a given inputs-output pair (
) and at the training stage, present
to
the input layer of the fuzzy system in Fig.2 and compute the outputs of layers. That is, compute [1], [5], [6], [7], [16],
[17], [19]:
First output:
Every node produces MF of an input parameter. The node output is explained by:
. (61)
where are the inputs;
are linguistic fuzzy sets associated with nodes. is the degree of MFs of a
fuzzy set.
Second output:
Every node is a fixed node, whose output is the minimum of all MF:
, (
( )+
where
is declared by triangular MF. Then we get:
( ( (
) )+ (62)
1
Min
3
1
Min
31
11
3
1
1
∑
∑
= ⁄
Layer 1 Layer 2 Layer 3

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1366
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Third output:
Depending on (62), the node calculates all rules as:
∑ ∑ ∑
(63)
Fourth output:
Every node here is an adaptive node with a node MF of output.
(64)
where and from (49), we get:
,
where( ) is the parameter set of the node.
Fifth output:
The single node is a fixed node labeled ∑ which computes the final output as the summation of all result
∑ ∑ ∑
∑ ∑ ∑
(
) (65)
Suppose:
∑ ∑ ∑
∑ ∑ ∑ (
)
(66)
Then the final output obtained is:
(67)
Now that we have noted a are free parameters to be modeled. We can collect these parameters into the -dim
vector as:
(68)
When select the initial parameters , if there are linguistic rules from human experts, then choose to be the
centers of the THEN part fuzzy sets in these linguistic rules; otherwise, choose arbitrarily in the output space .
In this way, we can say that the initial fuzzy system is constructed from human experts.
Step3: Update the parameters
Use the training algorithm to compute the updated parameters
, where
, and equal those computed in step2. That means, compute the new
parameters using the least squares model as:
[
( (
))
] (69)
(
)
[ (
)( (
)) ]
(70)
(
)
[ (
)( (
)) ]
( (
))
(71)
where is chosen in step2, and is a large constant. The modeled fuzzy system in (59) with the parameters
is equal to the corresponding elements in .
Step4: Repeat by going to step2 with , until the error | | , or until the equals a pre-specified number.
Step5: Repeat by going to step2 with ; that is, update the parameters using the next input-output
pair(
),
Keep in mind that the parameters are the centers of the fuzzy sets in the THEN parts of the rules, and the
parameters
are the left and right base points, the centers (triangle peak) of the Triangular fuzzy
sets in the IF parts of the rules [3], [9], [15]. Therefore, given a modeled fuzzy system (59), we can improve the fuzzy IF-
THEN rules that modeled the fuzzy system. These improved fuzzy IF-THEN rules may help to explain the model fuzzy
system in a user friendly manner.
8. APPLICATION (THE FUZZY SYSTEM OF WASHING MACHINES)
Fuzzy washing machines were the first major consumer products to use fuzzy systems [10]. They use a fuzzy system to
automatically set the cleanness of clothes depending on the amount of the dirty in water. There are multi-input:
(washing time), (temperature of water), and (washing powder). More specifically, the fuzzy system used is a three

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1367
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
input one output system, where the three inputs are measurements of dirtiness: washing time, temperature of water and
the washing powder, and the output is the cleanness of clothes. Clearly, the more cleanness of the clothes, the more
washing time, temperature of water and washing powder is needed. This work aims at presenting the idea of controlling
the cleanness of clothes using a fuzzy system, where it describes the procedure that can be used to get a suitable cleanness
of clothes. When one uses a washing machine, the person generally selects the length of wash time based on the dirtiness
of clothes. Unfortunately, there is no easy way to formulate an exact mathematical relationship between time, temperature
& powder with the degree of cleanness required [2], [6]. The real data we was obtained from a group of experts working
at Jumbo Electronics Company Ltd in the United Arab Emirates and contains 50 cases. We have built two models, the
first with the Mamdani fuzzy rule and the second with the ST fuzzy rule, see Fig.(3a) and (3b).
Fig.3a: FIS of WM using Fig.3b: FIS of WM using
Mamdani model. ST model.
8.1. Structure of the Applied Model
Now, we consider multi-inputs: (temperature of water), (washing powder), and (washing time) with single-output
y (cleanness of clothes).
The fuzzy system is composed of a fuzzifier, fuzzy rule-base, fuzzy inference and defuzzifier. To apply steps of FIS step
by step, first we described the three inputs with output as:
1. Input2 (Temperature of water): The range of temperature is 0 to 50 and the unit is °C; this data was treated and
measured so that it becomes trapped between 0 and 1, see Fig.(4a). The temperature of water (TW) has five different
degrees of linguistic variables: Very Cold (Vcold), Cold (cold), Good (good), Hot (hot) and Very Hot (Vhot). See
Fig.(4b).
2. Input3 (Amount of washing powder): The range of washing powder is from 0 to 100 and the unit is grams, in this
case also the data was measured, so that is converted also between 0 and 1, see Fig.(5a). Washing powder (WP) also
represented by five linguistic variables: Very Little (Vlittle), Little (little), Medium (med), Much (much) and Very
Much (Vmuch). See Fig.(5b).
3. Input1(Washing time): The range of time is from 0 to 15 and the unit is minutes, but this data was treated and
measured so that it is trapped between 0 and 1, see Fig.(6a). Washing time (WT) is represented by three linguistic
variables, Less Time (Ltime), Average Time (Atime) and More Time (Mtime), see Fig.(6b).
4. Output (Cleanness of clothes):The range of cleanness of clothes is from 0 to 1 and the unit is percent, see Fig.(7a).
Cleanness of clothes (CC) is represented by five linguistic variables, Not Clean (Nclean), Less Average (Laverage),
Average (Average), More Average (Maverage) and Full Clean (Fclean). See Fig.(7b).
8.2. Discussion and Results for the Model of the Fuzzy System with Mamdani and ST Models
Now, we build the proposed fuzzy system step by step on our application:
Step 1:
Define , fuzzy sets
and
with triangular membership functions
and
with
. Define:
fuzzifier performs a mapping: , where { }, with the Singleton fuzzifier (30). We used MATLAB
to created the programs. We have loaded the inputs-output variables for our application into the workspace, see table (2).
Three vectors of inputs with one vector of output are loaded with 50 cases. For the first observation that consisted of

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1368
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
(temperature=0.108, powder= 0.9273 and time=0.1493), see Fig (8a). We can build the first rule as: [(temperature is
Vcold) AND (powder is Vmuch) AND (time is Ltime)],
Step2:
We note the fuzzy rule-base consists of fuzzy IF-THEN rules and the centers of
are evaluated at the 75 red points shown in Fig. (1), then (42) becomes:
Fig.4a: Representation RD
of TW.
Fig.4b: Representation TW
by MFs
Fig.6a: Representation RD
of WT.
Fig.6b: Representation WT
by MFs.
Fig.5a: Representation RD
of WP.
Fig.5b: Representation WP
by MFs.
Fig.7a: Representation RD
of CC.
Fig.7b: Representation CC
by MFs.
{
⏟
⏟
(72a)
{
⏟
⏟
(72b)
Form (72a) is used when we create the Mamdani fuzzy rule but form (72b) is used when we create the Sugeno fuzzy rule,
where A & B are fuzzy sets , are input variables, y is the output variable, i is the number of rules, and the fuzzy
set A consists of
fuzzy subsets called linguistic terms characterized by MF (
) are triangular MFs
with form as in (40) and (41) when , and the linear function depends on inputs are defined
as (49).
The first linguistic term depends on linguistic variable , and consists of:
=”very cold”, (
), =”cold”, (
) =”good”, (
),
=”hot”, (
), and =”very hot”, (
).
The second linguistic term , depends on linguistic variable , and consists of:
” ”,(
), ” ”, (
) ” ”, (
*
=” much”, (
), and =”very much”, (
)
The third linguistic term , depends on linguistics variable , and consists of:
=”less time”,(
), =”good time”, (
) ,and =”more time”,(
).
The center of the fuzzy set is evaluated at the 50 red points as in Fig. (1). Also it is characterized by triangular
MFs ( ), denoted by We have applied the fuzzy operator “and” (t-norm) on all observations through 75-rules
that are built in this system as forms, (see Fig. (8a)):
IF (tem is Vcold) and (powder is Vmore) and (time is Ltime) THEN (cleanness is Average),
The fuzzy inference process determines the mapping as:
isinput fuzzy sets in the input space X , the fuzzy sets in the output space Y. Each of the 75 rules specifies a
fuzzy set given by the compositional rule of inference:

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1369
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
(
)
, and from (8) we get an MF:
( )
is a number of rules. (73)
From (14), fuzzy sets are characterized by MF:
y
{
} (74)
Then (74) becomes:
y
( ) (
( ) + (75)
where is an “implementation”. Since in this model we used Mamdani's minimum implication (26), then:
(
( ) + {
( ) }, (76)
from that, we get:
y {
( ) }
The aggregation operator was applied in order to get the fuzzy set that uses the s-norm or t-norm operator, depending
on the type of fuzzy implication. The aggregation is obtained by:
⋃ (77)
The MF of is computed by using s-norm, as:
{ }. (78)
Stepe3:
The defuzzifier performs a mapping as: where fuzzy set, is a crisp point . The center of the area is a final system output that is defined by
the following formula:
∑ ∑ ∑ ( . .
/ /,
∑ ∑ ∑ ( . .
/ /,
(79)
Fig.8a: Representation rules editor. Fig.8b: The rule view of inputs with output.
The fuzzy system has been built from the 75 rules of (72a) using Mamdani's minimum implication (26) with the
minimum inference system (27), the Singleton fuzzifier (35), and the Center Average Defuzzifier (39).See Fig. (8b).
We have created two programs, the first depended on the Mamdani model and the second depended on the ST model.
After applying the programs of FIS that is given by model (79), we have obtained good target results and we have
applied measure accuracy for all data between the actual output and the target by: | | (where Rv is
actual output & FISv is the output target by FIS). This value is very small, where the min error=0 and the max
error=0.15, when FIS is used with the Mamdani fuzzy rule model. But when the FIS is used with the ST fuzzy rule model
the min error=0 and the max error=0.11. We have represented all data with results in table (1) and (2). The „surfview‟
tool is the surface viewer that helps view the input-output surface of the FIS. This conception is very helpful to
understand how the system is going to behave for the entire range of values in the inputs space. In the plots below the
first surface viewer shows the output surface for two inputs Time (T) & Powder (P), see Fig.(9a), the second surface
shows the output surface between Time & Temperature (Temp), see Fig.(9b) and the third surface shows the output
surface for two inputs Temperature & Powder, (see Fig.(9c)).

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1370
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Fig.9a: Surface Fig.9b: Surface Fig.9c: Surface
b/w T & P. b/w T & Temp. b/w Temp. & P.
8.3. Discussion and Results for the Model of the Adaptive Fuzzy System Using Neural Network
We specify the structure of the fuzzy system to be modeled. Here we choose the fuzzy system with a minimum inference
system, a Singleton fuzzifier, the Center Average Defuzzifier, and a Triangular MF, given by:
∑ ∑ ∑
(
[ ( . .
/ /,]
∑ ∑ ∑ [ ( . .
/ /,]
)
(80)
where I=75 is the number of rules. Model (80) hasn‟t been modeled because the free parameters
are not specified. These parameters should be determined in order to represent the :
Step1: Determine the initial parameters
according to the linguistic rules from
human experts as (when then
, similarly for
all , and for each input.
Step2: From a given inputs-output pair (
) cases, then we can compute the outputs of
layers on Fig. (2) as:
(i) The node of first output is represented by:
(
*,
(
*,
(
*,
where is the degree of MFs of a fuzzy set.
(ii) To compute the second output, we should use the minimum function of all MFs as:
(
),
Since
is a Triangular MF, then we get:
. (
(
+ +/
when p=1, we have (0.1, 0.1, 0.9; 0.462), then
( (
) ) ,
Similarly, we can find all with respect to all inputs.
(iii) For all rules, we have calculated the node as:
(
( (
(
) )+
∑ ∑ ∑
( (
(
) )+
)

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1371
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
(iv) The fourth output depends on a node MF of output with an adaptive node . Then:
Since
, then we should determine the initial
parameters of ( ) such as
.
Then the center of the first consequence fuzzy set is . Similarly, we
determined all parameters of linear functions for each rules.
(v) To compute the final output, we must take the summation of all results as:
∑ ∑ ∑
∑ ∑ ∑
(
),
Step3: In step2 we have specified initial parameters of ,
, when . But
now, we update these parameters at , using the least squares model and repeat all the procedure in step2 to
compute . From (69) to (71), we compute the new parameters as:
[ ( )
]
[ (
)
]
[ (
)
]
( )
,
Similarly, we can update all parameters of for all training data. Repeat all procedures in step2 with until the
last specific number of is reached and with to update the parameters use the next input-output pair.
We have created a program, and selected initial parameters. After applying the programs of AFS using a Neural Network
that is given by model (80), we have obtained better results with the Neural Network than with the FIS. we have applied
measure of accuracy to all data, where the min error=0 and the max error=0.008, (see table (1) and (2)) with the best
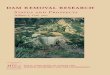
training error (0.002483) and average testing error of training data (0.0024745), see Fig.(10a) and (10b).
Fig.10a: Representation of Fig.10b: Representation of
training error with epochs 55. training data and FIS output.
Table1: Representation of Minimum and Maximum error with Average error.
Type of model Min error Max error Average error
of training data
FIS (Mamdani model) 0.0 0.15 0.0413
FIS (ST model) 0.0 0.11 0.0326
ANFIS (ST model) 0.0 0.008 0.0024745

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1372
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
Table2: Representation of results of FIS with (Mamdani & ST model), ANFIS and errors.
No. Actual
output
FIS with
(Mamdani model) E(FISM)
FIS with
( ST model) E(FISST)
ANFIS
(ST model) E(ANFISST)
1. 0.46 0.427 0.033 0.478 0.016 0.462 0.002
2. 0.55 0.495 0.055 0.52 0.03 0.55 0
3. 0.30 0.315 0.015 0.334 0.038 0.296 0.004
4. 0.56 0.602 0.041 0.55 0.011 0.562 0.002
5. 0.56 0.5 0.06 0.59 0.028 0.562 0.002
6. 0.66 0.675 0.015 0.683 0.023 0.66 0
7. 0.58 0.55 0.029 0.562 0.02 0.587 0.007
8. 0.47 0.427 0.043 0.43 0.043 0.474 0.004
9. 0.59 0.488 0.102 0.589 0.005 0.595 0.005
10. 0.44 0.38 0.06 0.55 0.11 max 0.441 0.001
11. 0.57 0.60 0.03 0.55 0.022 0.575 0.005
12. 0.46 0.483 0.023 0.42 0.042 0.463 0.003
13. 0.29 0.266 0.024 0.264 0.022 0.286 0.004
14. 0.74 0.80 0.060 0.8 0.063 0.74 0
15. 0.43 0.406 0.024 0.417 0.010 0.428 0.002
16. 0.30 0.297 0.003 0.26 0.037 0.297 0.003
17. 0.47 0.473 0.003 0.453 0.02 0.473 0.003
18. 0.65 0.667 0.017 0.68 0.031 0.649 0.001
19. 0.36 0.315 0.045 0.354 0.015 0.359 0.001
20. 0.50 0.495 0.005 0.483 0.012 0.496 0.004
21. 0.35 0.376 0.026 0.32 0.067 0.353 0.003
22. 0.52 0.506 0.014 0.472 0.045 0.517 0.003
23. 1 0.937 0.063 1 0 min 1 0 min
24. 0.68 0.606 0.074 0.629 0.053 0.685 0.005
25. 0.83 0.804 0.025 0.8 0.024 0.827 0.003
26. 0.46 0.473 0.013 0.467 0.005 0.463 0.003
27 0.81 0.745 0.065 0.762 0.052 0.819 0.008 max
28 0.76 0.83 0.070 0.8 0.041 0.76 0
29 0.45 0.482 0.032 0.48 0.029 0.451 0.001
30 0.19 0.19 0 min 0.226 0.039 0.187 0.003
31 0.63 0.641 0.011 0.58 0.047 0.627 0.003
32 0.69 0.731 0.041 0.68 0.0130 0.698 0.008
33 0.52 0.639 0.119 0.55 0.033 0.517 0.003
34 0.62 0.545 0.075 0.595 0.021 0.616 0.004
35 0.65 0.655 0.005 0.651 0.002 0.652 0.002
36 0.62 0.606 0.014 0.58 0.036 0.617 0.003
37 0.77 0.762 0.008 0.776 0.006 0.77 0
38 0.87 0.842 0.028 0.786 0.083 0.874 0.004
39 0.33 0.482 0.15 max 0.35 0.022 0.328 0.002
40 0.76 0.731 0.029 0.767 0.008 0.761 0.001
41 0.78 0.842 0.061 0.8 0.018 0.781 0.001
42 0.78 0.83 0.049 0.762 0.019 0.787 0.007
43 0.91 0.852 0.058 0.855 0.058 0.917 0.007
44 0.61 0.606 0.004 0.55 0.054 0.609 0.001
45 0.51 0.647 0.137 0.55 0.043 0.507 0.003
46 0.75 0.745 0.005 0.787 0.039 0.749 0.001
47 0.89 0.843 0.047 0.82 0.071 0.894 0.004
48 0.61 0.655 0.045 0.6 0.005 0.605 0.005
49 0.42 0.482 0.062 0.459 0.041 0.418 0.002
50 0.78 0.731 0.049 0.721 0.06 0.784 0.004
9. CONCLUSION
In this work, we have suggested first a new fuzzy system at 3-dim depending on Mamdani's minimum implication with
the minimum inference system, the Singleton fuzzifier, and the Center Average Defuzzifier and second a model of the
Adaptive Fuzzy System using a Neural Network. We have applied these models on 50 real observations of fuzzy
washing machine models and obtained very good results for all data. We have recorded a minimum error of 0 when we
applied FIS with Mamdani & ST, but recorded a maximum error of 0.15 and 0.11 with Mamdani & ST models
respectively. Also, we have obtained the average error of training data equal to 0.0413 with the Mamdani model and
0.0326 with the ST model. We have recorded better results with the model of the Adaptive Fuzzy System using a Neural
Network that depends on the ST model. The maximum error is the equal to 0.008 and the average error of training data is
equal to 0.0024745. We conclude that the best results with the lesser error are obtained with Adaptive Fuzzy System. In
the future, we can develop these models of fuzzy system to generate many outputs rather than one output or extend the
number of input variables such as weight of clothes or types of clothes or types of dirt. Also, we can change the fuzzy
inference system with another types, or with different type of fuzzifier or defuzzifier.

International Journal of Mathematical Sciences, ISSN:2051-5995, Vol.33, Issue.2 1373
© RECENT SCIENCE PUBLICATIONS ARCHIVES| October 2013|$25.00 | 27702790 |
*This article is authorized for use only by Recent Science Journal Authors, Subscribers and Partnering Institutions*
ACKNOWLEDGEMENTS
The author wishes to thank the reviewers for their excellent suggestions that have been incorporated into this paper. I
would like to thank and acknowledge Professor. Deepak Gupta, Head of Department of Mathematics, M.M. University,
Mullana, Ambala, India, who advised me to improve my work.
REFERENCE
[1] L.Aik& .Jayakumar (2008), “A Study of Neuro-fuzzy System in Approximation-based Problems”, Matematika,
Vol. 24, No.2, pp.113–130.
[2] M.Agarwal (2011),”Fuzzy logic control of washing machines”. Department of Mechanical Engineering Indian
Institute of Technology, Kharagpur - 721302, India, pp. 1-5.
[3] R.Belohlavek and G. Klir (2011),“Concepts and Fuzzy Logic”. Massachusetts Institute of Technology, London
England.
[4] Y.Chai, L.Jia and Z. Zhang (2009),“Mamdani model based adaptive neural fuzzy inference system and its
application”. World Academy of Science, Engineering and Technology, Vol. 51, pp. 845-852.
[5] E.Doğan, L. Saltabaş and E. ıldırım (2007),”Adaptive neuro-fuzzy inference system application for estimating
suspended sediment loads”. International Earthquake Symposium Kocher, Vol. 5, pp. 537-540.
[6] R.Hndoosh, M. Saroa and S. Kumar (2012),“Fuzzy and adaptive neuro-fuzzy inference system of washing machine”,
European Journal of Scientific Research, Vol. 86, No 3, pp.443-459.
[7] C.Jose, R. Neil and W. Curt (1999), “Neural and Adaptive Systems”, John Wiley & SONS, INC. New ork.
[8] G.Jandaghi, R. Tehrani, D. Hosseinpour, R. Gholipour and S. Shadkam (2010),“Application of fuzzy-neural
networks in multi-ahead forecast of stock price”. African Journal of Business Management, Vol. 4, pp. 903-914.
[9] T.Kamel and M. Hassan (2009),”Adaptive neuro fuzzy inference system (ANFIS) for fault classification in the
transmission lines”, The Online Journal on Electronics and Electrical Engineering, Vol. 2, pp. 164-169.
[10] R.Milasi, M.Jamali and C. Lucas (2010), “Intelligent washing machine: A bioinspired and multi-objective
approach”, International Journal of Control, Automation, and Systems, Vol. 5, No. 4, pp. 436-443.
[11] V.Marza and A. Seyyedi, (2008), “Estimating development time of software projects using a neuro fuzzy
approach”. World Academy of Science, Engineering and Technology, Vol. 46, pp. 575-579.
[12] P.Nayak, K.Sudheer, D. Rangan& K. Ramasastri (2004),” A neuro-fuzzy computing technique for modeling
hydrological time series”. Journal of Hydrology, Vol. 291, pp. 52–66.
[13] A.Ramesh kumar and S. Arumugam (2011), “A neuro-fuzzy integrated system for non-linear buck and quasi-
resonant buck converter”. European Journal of Scientific Research, Vol.51 No.1, pp. 66-78.
[14] D.Ruan and P. Wang (1997),”Intelligent Hybrid System: Fuzzy Logic, Neural Network and Genetic Algorithm”,
Kluwer Academic Publishers.
[15] R.Rojas (1996), “Neural Networks”, Springer-Verlag, Berlin.
[16] A.Samandar (2011),”A model of adaptive neural-based fuzzy inference system (ANFIS) for prediction of friction
coefficient in open channel flow”. Academic Journals Scientific Research and Essays, Vol. 6, No. 5, pp. 1020-
1027.
[17] J.Shing and R. Jang (1993), “ANFIS: Adaptive network-based fuzzy inference system”. IEEE Transactions on
Systems, Man, and Cybernetics, Vol. 23, No. 3, pp. 665-685.
[18] M.Singh, M. Sharma and S. Kumar (2009),” Conjugate descent formulation of back propagation error in feed
forward neural network”. ORION, Vol. 25, pp. 69-86.
[19] S.Sivanandam and S. Deepa (2008),”Principal of Soft Computing”, Wiley India (P) Ltd.
[20] L.Wang (1997), “A Course in Fuzzy Systems and Control”. Prentice-Hall International, Inc.