Embed Size (px)
Citation preview
3 FAZ 4 TELLI PARALEL AKTIF GÜÇ FILTRESITASARIMI VE GERÇEKLESTIRILMESI
3 PHASE 4 WIRE PARALLEL ACTIVE POWER FILTERDESIGN AND IMPLEMENTATION
ÇAGIN BARIS CENGIZ
Yrd. Doç. Dr. Umut Sezen
Tez Danısmanı
Hacettepe Üniversitesi
Lisansüstü Egitim - Ögretim ve Sınav Yönetmeligi’nin
Elektrik ve Elektronik Mühendisligi Anabilim Dalı Için Öngördügü
YÜKSEK LISANS TEZI
olarak hazırlanmıstır.
2014
ÇAGIN BARIS CENGIZ’in hazırladıgı 3 Faz 4 Telli Paralel Aktif Güç Filtresi Ta-
sarımı ve Gerçeklestirilmesi adlı bu çalısma asagıdaki jüri tarafından ELEKTRIK
VE ELEKTRONIK MÜHENDISLIGI ANABILIM DALI’nda YÜKSEK LISANS TEZI
olarak kabul edilmistir.
Prof. Dr. Isık Çadırcı
Baskan
Yrd. Doç. Dr. Umut Sezen
Danısman
Prof. Dr. Ugur Baysal
Üye
Yrd. Doç. Dr. Harun Artuner
Üye
Yrd. Doç. Dr. Mithat Kısacıkoglu
Üye
Bu tez Hacettepe Üniversitesi Fen Bilimleri Enstitüsü tarafından YÜKSEK LISANS
TEZI olarak kabul edilmistir.
Prof. Dr. Fatma SEVIN DÜZ
Fen Bilimleri Enstitüsü Müdürü
ETIK
Hacettepe Üniversitesi Fen Bilimleri Enstitüsü, tez yazım kurallarına uygun olarak
hazırladıgım bu tez çalısmasında;
• tez içindeki bütün bilgi ve belgeleri akademik kurallar çerçevesinde elde etti-
gimi,
• görsel, isitsel ve yazılı tüm bilgi ve sonuçları bilimsel ahlak kurallarına uygun
olarak sundugumu,
• baskalarının eserlerinden yararlanılması durumunda ilgili eserlere bilimsel norm-
lara uygun olarak atıfta bulundugumu,
• atıfta bulundugum eserlerin tümünü kaynak olarak gösterdigimi,
• kullanılan verilerde herhangi bir degisiklik yapmadıgımı,
• ve bu tezin herhangi bir bölümünü bu üniversite veya baska bir üniversitede
baska bir tez çalısması olarak sunmadıgımı
beyan ederim.
. . . / . . . / 20. . .
Çagın Barıs Cengiz

ÖZET
3 FAZ 4 TELLI PARALEL AKTIF GÜÇ FILTRESITASARIMI VE GERÇEKLESTIRILMESI
ÇAGIN BARIS CENGIZ
Yüksek Lisans, Elektrik ve Elektronik Mühendisligi Bölümü
Tez Danısmanı: Yrd. Doç. Dr. Umut Sezen
Temmuz 2014, 98 sayfa
Dogrusal olmayan yüklerin yaygın kullanımı, önem arzeden bir güç kalitesi prob-
lemi olan harmonikleri ortaya çıkarmaktadır. Son yıllara degin harmoniklerin sebep
oldugu problemlerin çözümünde kullanılan pasif filtrelerin performans ve güvenirlik
açısından kimi eksiklikleri vardır. Gelisen yarıiletken teknolojiisyle beraber, harmo-
niklerle ilgili problemlerin çözümünde Aktif Güç Filtresi (AGF) adı verilen ve pasif filt-
relere göre bir çok açıdan üstün performans saglayan aktif anahtarlamalı sistemlerin
kullanımı mümkün hale gelmistir. Bu tez çalısmasında, nötr baglantılı 3 faz sistem-
lerde harmonik ve harmonik kaynaklı olusan nötr akım kompanzasyonunu saglayan
gerilim kaynaklı evirgeç tabanlı 3 faz 4 telli paralel aktif güç filtresinin (PAGF) analiz,
tasarım ve gerçeklestirimine odaklanılmıstır.
Bu tez kapsamında PAGF’lerde kullanılan sistemlerin ve topolojilerin genel bir ana-
lizinin ardından PAGF uygulanabilirlik kosulları, referans çıkartım ve kontrol yöntem-
leri, arayüz filtre tasarım baslıkları ele alınmıstır. Sonrasında belirlenen PAGF anma
degerlerine göre eleman seçimi ve güç katının olusturulmasına yönelik ön tasarım
çalısmaları yapılmıstır. Sistem degiskenlerinin belirlenmesinin ardından, PAGF kom-
panzasyon performansını gözlemlemek için benzetim ve gerçeklestirim çalısmaları
bir arada yapılmıstır.
Anahtar Kelimeler: Güç kalitesi, aktif güç filtreleri, gerilim kaynaklı evirgeç, 3 faz
4 telli paralel aktif güç filtresi, harmonik kompanzasyon, tekrarlamalı kesikli fourier
dönüsümü (RDFT), uzay vektör darbe genislik modülasyonu (UVDGM), LCL Filtre
i

ABSTRACT
3 PHASE 4 WIRE PARALLEL ACTIVE POWER FILTER DESIGNAND IMPLEMENTATION
ÇAGIN BARIS CENGIZ
Master of Science, Department ofElectrical and Electronics Engineering
Supervisor: Yrd. Doç. Dr. Umut Sezen
July 2014, 98 pages
Common usage of nonlinear loads creates an important power quality problem, cal-
led harmonics. Up to recent years, harmonics related problems are tried to be solved
by passive filters which have some drawbacks for both compensation performance
and reliability. Developing technology in semiconductor area makes it possible to
solve harmonics related problem by active switching devices called Active Power Fil-
ters (APF), which have superior performance in many aspects over passive filters.
This thesis is focused on analysis, design and implementation of voltage source
converter based 3 phase 4 wire Parallel Active Power Filter (PAPF) which compen-
sates harmonics and neutral currents caused by harmonics for 3 phase systems
with neutral connection.
In the scope of this thesis, after the general analysis of system and topologies used
in APFs; application issues of PAPFs, reference extraction, control, modulation met-
hods and interface filter design topics are discussed. Afterwards, a preliminary de-
sign work is made on component selection and power stage construction for deter-
mined PAPF ratings. After determining the system parameters, PAPF is simulated
and implemented together to observe overall system compensation performance.
Keywords: Power quality, active power filters, voltage source converter, 3 phase 4
wire paralel active power filter, harmonic compensation, recursive discrete fourier
transform (RDFT), space vector pulse width modulation (SVPWM), LCL filter
ii
TESEKKÜR
Tez çalısması süresince verdigi destek ve yapmıs oldugu katkıların yanında mühen-
dislige olan nitelikli yaklasımından ötürü, çalısma arkadasım Sinan Tahtacı’ya,
Tezin ön hazırlık ve benzetim çalısması asamalarında yapmıs oldugu katkılardan
ötürü Adnan Tan’a,
Tezin donanım entegrasyon asamasındaki yardımları ve sagladıkları çalısma ortamı
için Vahap Yıldız, Toygun Kazan, Bahadır Durdubas ve tüm Endoks çalısanlarına,
Tez çalısmasının yönlendirilmesi, yazımı ve sonuç asamasındaki katkılarından ötürü
tez danısmanım Yrd. Doç. Dr. Umut Sezen ile paylastıkları görüs ve önerileri için jüri
üyelerine,
Ögrencilerine olan karsılıksız sevgisi, destegi ve güler yüzü sebebiyle hocam Prof.
Dr. Feza Arıkan’a,
Anlayısları ve destekleri için anneme, babama ve teze olan sevimli katkıları ile ihmal
etmedikleri gülümsemeleri için kardeslerim Dilan ve Tugçe’ye,
Anlattıkları her hikaye ve insan için; Oguz Atay, Barıs Bıçakçı ve Cenk Taner’e,
Yanlıs hayatı dogru yasama çabasındaki tüm onurlu insanlara,
tesekkür ederim.
iii
IÇINDEKILER
Sayfa
ÖZET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
TESEKKÜR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
IÇINDEKILER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
ÇIZELGELER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
SEKILLER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
SIMGELER VE KISALTMALAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii
SÖZLÜK DIZINI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
1. GIRIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1. Harmonik Filtreleme Yöntemleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2. Aktif Güç Filtreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3. Gerilim Kaynaklı Evirgeç Tabanlı Paralel Aktif Güç Filtreleri(GKET-PAGF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4. Tezin Amacı ve Içerigi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2. PARALEL AKTIF GÜÇ FILTRELERININ ANALIZI VE ÇALISMAPRENSIPLERI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1. Dogrusal Olmayan Yük Çesitleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2. Referans Çıkartım ve Kontrol Yöntemleri . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1. Referans Çıkartım Yöntemleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1.1. Zaman Alanlı Yöntemler . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1.2. Frekans Alanlı Yöntemler . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2.2. Kontrol Yöntemleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.2.1. DA-Bag Kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.2.2. Akım Kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3. Modülasyon Yöntemleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4. Arayüz Filtreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.5. Özet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3. SISTEM ÖN TASARIM ÇALISMASI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
iv
3.1. Sistem Bilesenlerinin Belirlenmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.1.1. DA Bag Kapasitörlerinin Seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.1.2. Lamine Baranın Olusturulması . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.1.3. IGBT ve IGBT Sürücülerinin Seçimi . . . . . . . . . . . . . . . . . . . . . . . . 61
3.1.4. Arayüz Filtre Elemanlarının Seçimi . . . . . . . . . . . . . . . . . . . . . . . . . 63
4. BENZETIM ÇALISMALARI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1. Sebeke ve Yükün Modellenmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2. PAGF Benzetim Çalısmaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3. Özet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5. PAGF GERÇEKLESTIRIM ÇALISMALARI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.1. PAGF Donanım Entegrasyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.1.1. Elektronik Sistem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.1.2. Güç Katı Bilesenleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.2. PAGF Deneysel Sonuçlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3. Özet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6. SONUÇLAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
KAYNAKLAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
ÖZGEÇMIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
v
ÇIZELGELER
Sayfa
Çizelge 1.1. IEEE 519 Harmonik Akım ve Bozunum Limitleri . . . . . . . . . . . . . . . . 2
Çizelge 2.1. PAGF Evirgeç Çıkıs Gerilimleri ve Uzay Vektörleri . . . . . . . . . . . . . . 42
Çizelge 2.2. UVDGM Sektör Anahtarlama Vektör Sıralamaları . . . . . . . . . . . . . . 46
Çizelge 3.1. LCL Filtre Bilesen Degerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Çizelge 4.1. Benzetim Çalısması Yük Bilesen Degerleri-1 . . . . . . . . . . . . . . . . . . 67
Çizelge 4.2. Benzetim Çalısması Yük Akımı Harmonik Bilesenleri . . . . . . . . . . . 69
Çizelge 4.3. PAGF Benzetim Çalısması Harmonik Kompanzasyon Sonuçları-1 75
Çizelge 4.4. Benzetim Çalısması Yük Bilesen Degerleri-2 . . . . . . . . . . . . . . . . . . 77
Çizelge 4.5. PAGF Benzetim Çalısması Harmonik Kompanzasyon Sonuçları-2 77
Çizelge 5.1. Test Düzenegi Yük Bilesen Degerleri . . . . . . . . . . . . . . . . . . . . . . . . . 85
Çizelge 5.2. PAGF Harmonik Kompanzasyon Sonuçları . . . . . . . . . . . . . . . . . . . . 90
vi
SEKILLER
Sayfa
Sekil 1.1. AGF Baglantı Topolojileri, (a) Paralel Aktif Güç Filtresi, (b) SeriAktif Güç Filtresi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Sekil 1.2. Birlesik Güç Kalitesi Düzenleyicisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Sekil 1.3. AGF Evirgeç Topolojileri, (a) Gerilim Kaynaklı Evirgeç, (b) AkımKaynaklı Evirgeç . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Sekil 1.4. Paralel Aktif Güç Filtresi Temel Birimleri . . . . . . . . . . . . . . . . . . . . . . . . . 7
Sekil 1.5. 3-faz 3-Telli Paralel Aktif Güç Filtre Seması . . . . . . . . . . . . . . . . . . . . . 7
Sekil 1.6. 3-Faz 4-Telli PAGF Topolojileri, (a) 3-Faz 4-Telli 4 Kutuplu PAGFTopolojisi (b) 3-Faz 4-Telli Kapasitör Orta Nokta Baglantılı PAGFTopolojisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Sekil 2.1. Harmonik Akım Kaynagı Yük Gösterimleri, (a) Harmonik AkımKaynagı Tek Hat Gösterimi, (b) Esdeger Harmonik Akım KaynagıGösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
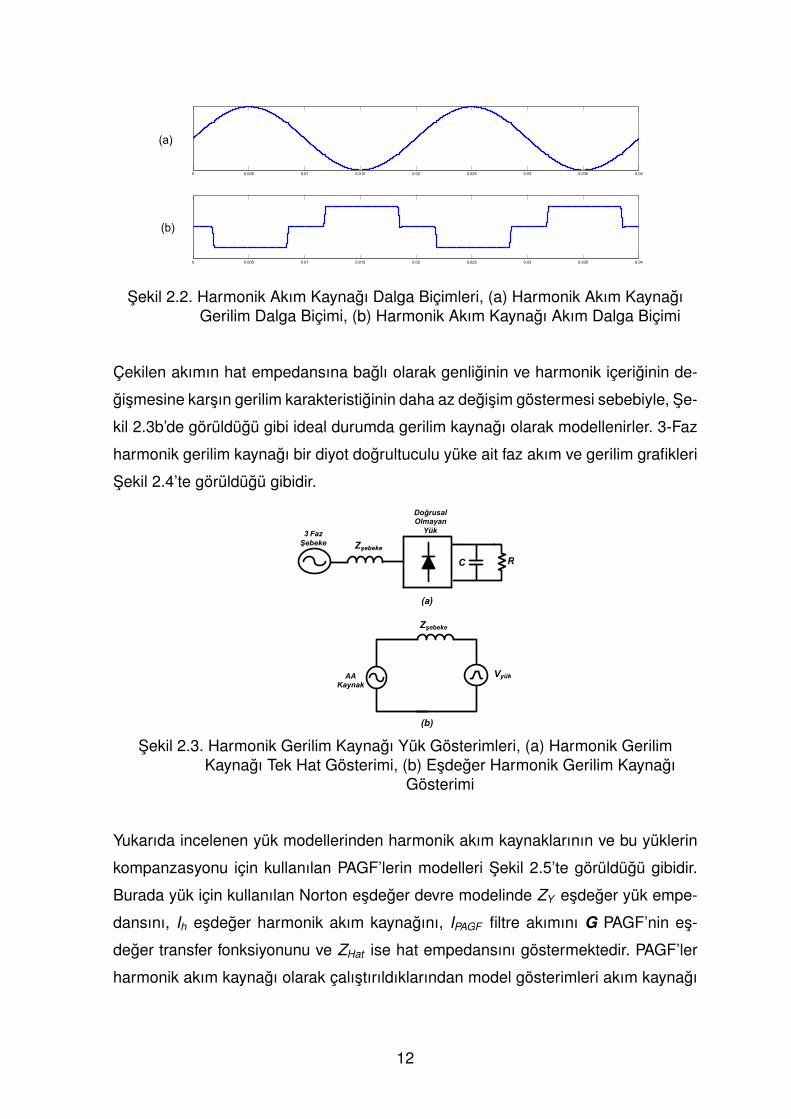
Sekil 2.2. Harmonik Akım Kaynagı Dalga Biçimleri, (a) Harmonik AkımKaynagı Gerilim Dalga Biçimi, (b) Harmonik Akım Kaynagı AkımDalga Biçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Sekil 2.3. Harmonik Gerilim Kaynagı Yük Gösterimleri, (a) Harmonik GerilimKaynagı Tek Hat Gösterimi, (b) Esdeger Harmonik GerilimKaynagı Gösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
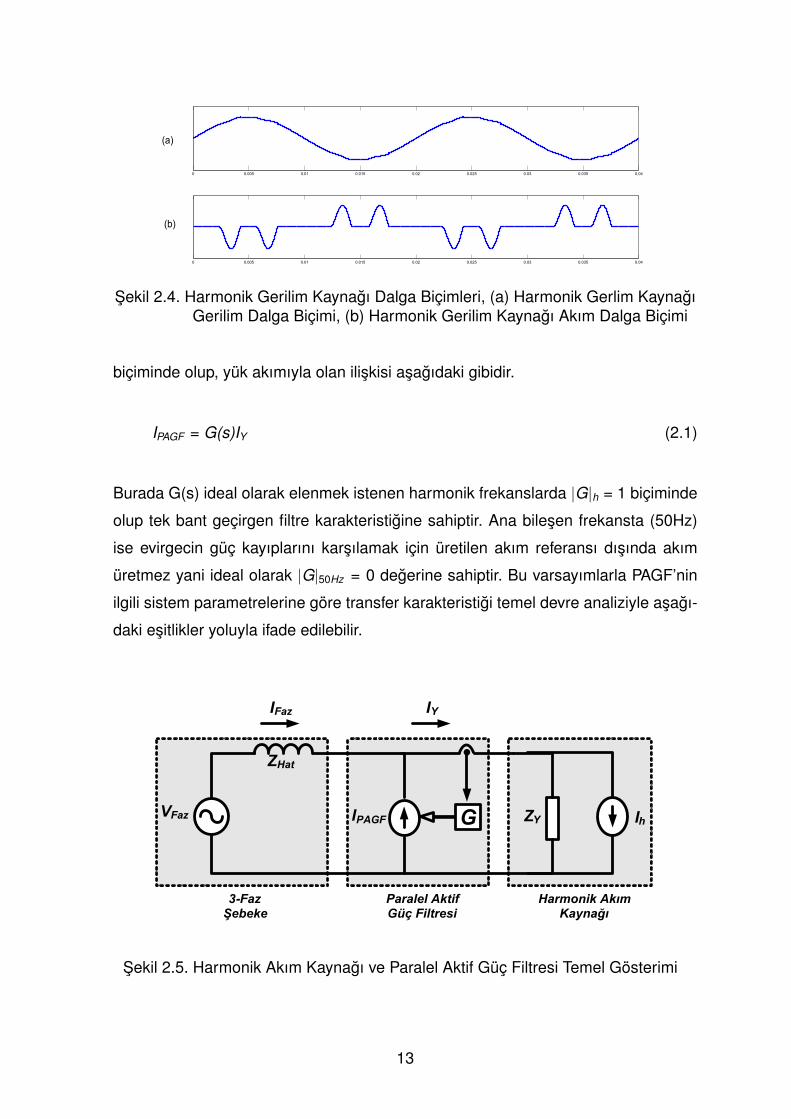
Sekil 2.4. Harmonik Gerilim Kaynagı Dalga Biçimleri, (a) Harmonik GerlimKaynagı Gerilim Dalga Biçimi, (b) Harmonik Gerilim Kaynagı AkımDalga Biçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Sekil 2.5. Harmonik Akım Kaynagı ve Paralel Aktif Güç Filtresi TemelGösterimi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Sekil 2.6. Harmonik Gerilim Kaynagı ve Paralel Aktif Güç Filtresi TemelGösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Sekil 2.7. Harmonik Gerilim Kaynagı DA Kapasitörlü Yapı . . . . . . . . . . . . . . . . . . 17
Sekil 2.8. Harmonik Gerilim Kaynagı DA Kapasitör ve DA Indüktörlü Yapı . . . . 18
Sekil 2.9. Harmonik Gerilim Kaynagı DA Kapasitör ve AA indüktörlü Yapı . . . . 18
Sekil 2.10. ARGT Referans Çıkartım Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
vii
Sekil 2.11.αβ ve dq Koordinat Sistemleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Sekil 2.12. SRD Referans Çıkartım Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Sekil 2.13. SRD Seçimli Harmonik Referans Çıkartım Seması . . . . . . . . . . . . . . 23
Sekil 2.14. 3-Faz 4-Telli PAGF SRD Referans Çıkartım Seması . . . . . . . . . . . . . . 24
Sekil 2.15. 8-Noktalı Zaman Alanında Ondalıklama ile FFT . . . . . . . . . . . . . . . . . 27
Sekil 2.16. RDFT ve Kayan Pencere Uygulama Örnegi . . . . . . . . . . . . . . . . . . . . . 27
Sekil 2.17. RDFT Frekans Tepkisi ( N=400, k=5), (a) Genlik Tepkisi, (b) FazTepkisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Sekil 2.18. RDFT Referans Çıkartım Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Sekil 2.19. DA Bag Kontrol Semaları, (a) DA Bag SRD Kontrol Seması,(b) DA Bag Genel Kontrol Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Sekil 2.20. DA Bag Dengesizlik Kontrol Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Sekil 2.21. PAGF Genel Kontrol Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Sekil 2.22. PAGF Tek Hat Baglantı Seması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Sekil 2.23. PAGF Dogrusal Akım Kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Sekil 2.24. PAGF Ideal Dogrusal Akım Kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Sekil 2.25. PAGF Gerçel Dogrusal Akım Kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Sekil 2.26. PAGF Gerçel Dogrusal Akım Kontrol Blogu Referans Takibi, (a)Kc = 1 (b) Kc = 10 (c) Kc = 25 (Rf = 150mΩ, Lf = 375µH ve Gτ−I =Gτ−II=30µs) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Sekil 2.27. PAGF Evirgeci ve Anahtarlama Elemanları . . . . . . . . . . . . . . . . . . . . . . 38
Sekil 2.28. Sinüzoidal Darbe Genislik Modülasyonu (SDGM) Uygulama Seması 39
Sekil 2.29. SDGM Tek Faz Uygulama Örnegi, (a) Referans ve Tasıyıcı Sinyal,(b) S1 Anahtarlama Sinyali, (c) S4 Anahtarlama Sinyali . . . . . . . . . . . 39
Sekil 2.30.αβ0 Uzayında UVDGM Anahtarlama Vektörleri . . . . . . . . . . . . . . . . . . 43
Sekil 2.31.αβ Düzleminde Referans vektör ile UVDGM Anahtarlama Vektörleri 44
Sekil 2.32. UVDGM Anahtarlama Sıraları, (a) Sektör-1~V0 - ~V1 - ~V2 - ~V7 - ~V2 - ~V1 - ~V0 Anahtarlama Sırası, (b) Sektör-1~V0 - ~V2 - ~V1 - ~V7 - ~V1 - ~V2 - ~V0 Anahtarlama Sırası . . . . . . . . . . . . . . . . . . 45
viii
Sekil 2.33. UVDGM αβ0 Uzay ve Zaman Referansları, (a) 3-Faz 3-Telli ve3-Faz 4-Telli UVDGM αβ0 Uzay Referansları, (b) 3-Faz 3-Telli ve3-Faz 4-Telli UVDGM Zaman Alanı Referansları . . . . . . . . . . . . . . . . . 47
Sekil 2.34. UVDGM Sayısal Anahtarlama Seması . . . . . . . . . . . . . . . . . . . . . . . . . 48
Sekil 2.35. UVDGM Tek Faz Uygulama Örnegi, (a)Referans Sinyal, (b) S1Anahtarlama Sinyali, (c) S4 Anahtarlama Sinyali . . . . . . . . . . . . . . . . . 49
Sekil 2.36. L Filtre Baglantı Semaları, (a) L Filtre 3-Faz Baglantı Seması, (b) Lfiltre Tek Hat Gösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Sekil 2.37. LCL Filtre Baglantı Semaları, (a) LCL Filtre 3-Faz BaglantıSeması, (b) LCL filtre Tek Hat Gösterimi . . . . . . . . . . . . . . . . . . . . . . . . 51
Sekil 2.38. LCL Filtre Frekans Tepkisi, (a) Genlik Tepkisi, (b) Faz Tepkisi . . . . . . 53
Sekil 2.39. LCL Filtre Pasif Sönümlendirme Seması . . . . . . . . . . . . . . . . . . . . . . . 54
Sekil 2.40. LCL Pasif Sönümlendirmeli ve Sönümlendirmesiz FrekansTepkileri, (a) Genlik Tepkisi, (b) Faz Tepkisi . . . . . . . . . . . . . . . . . . . . . 54
Sekil 2.41. PAGF Güç Katı ve Kontrol Sistemi Genel Görünüm . . . . . . . . . . . . . . 56
Sekil 3.1. DA Bara SematikGösterim(C1 = C2 = 4x5600uF , Rd−1 = Rd−2 = 11KΩ) . . . . . . . . . . . . 59
Sekil 3.2. Parazitik Endüktans (LP) ve Evirgeç Yapısı Tek Faz Gösterimi . . . . . 60
Sekil 3.3. Lamine Bara Kesit Görünümleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Sekil 3.4. PAGF Lamine Bara Üst Görünüm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Sekil 3.5. PAGF Güç Katı 3-Boyutlu Görünüm . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Sekil 4.1. Sebeke Empedansı Tek Hat Gösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Sekil 4.2. Diyot Dogrultuculu Faz-Nötr Yük Seması . . . . . . . . . . . . . . . . . . . . . . . . 67
Sekil 4.3. Benzetim Çalısması Yük Faz Gerilim-Akım Dalga Biçimleri, (a)Faz Gerilimi (Va), (b) Faz Akımı (Ia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Sekil 4.4. Benzetim Çalısması Yük Akımı Harmonik Spektrumu . . . . . . . . . . . . . 68
Sekil 4.5. PAGF PSCAD Model Gösterimleri, (a) PSCAD Genel BaglantıSeması, (b) PSCAD PAGF Modeli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Sekil 4.6. Benzetim Çalısması FKD ve Sinüzoidal Referans Çıkartımı, (a)Faz Gerilimi ve FKD, (b) Üretilen Sinüzoidal Referans . . . . . . . . . . . . . 70
ix
Sekil 4.7. Benzetim Çalısması DA Bag Gerilim Kontrolü(VDA−1 = −VDA−2 = 350V ), (a) Toplam DA Bag Gerilimi, (b) AyrıkKapasitör Gerilimleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Sekil 4.8. Benzetim Çalısması Kontrol Sistemi Akım Referans Takibi . . . . . . . . 72
Sekil 4.9. Benzetim Çalısması Harmonik Kompanzasyon Dalga Biçimleri,(a) Kaynak Gerilimi, (b) Kaynak Akımı, (c) Yük Akımı Gerilimi(d) PAGF Akımı, (e) DA Bag Gerilimi . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Sekil 4.10. Benzetim Çalısması Kompanzasyon Öncesi ve Sonrası NötrAkımları, (a) Kaynak Nötr Akımı, (b) PAGF Nötr Akımı . . . . . . . . . . . . 74
Sekil 4.11. Benzetim Çalısması Kaynak Akımı Spektrumu (50Hz-1000Hz) . . . . 75
Sekil 4.12. Benzetim Çalısması Kaynak Akımı Spektrumu (50Hz-50000Hz) . . . 76
Sekil 5.1. PAGF Elektronik Sistem Blok Diyagramı . . . . . . . . . . . . . . . . . . . . . . . . 79
Sekil 5.2. DSP Akıs Diyagramı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Sekil 5.3. PAGF Elektronik Kart Rafı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Sekil 5.4. PAGF Test Düzenegi Sematik Gösterim . . . . . . . . . . . . . . . . . . . . . . . . . 83
Sekil 5.5. PAGF Test Düzenegi Fotografı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Sekil 5.6. Yük Akım Gerilim Dalga Biçimleri, (1): Yük Faz Gerilimi (Va),(2): Yük Faz Akımı (Iya) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Sekil 5.7. Yük Akımı Harmonik Spektrumu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Sekil 5.8. PAGF FKD ve Geçici Hal Akım Referans Takip Basarımı(1): Faz Gerilimi (Va), (2): Faz Anahtarlaması (San), (3): FazAkımı (IFa) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Sekil 5.9. DA Bag Gerilim Kontrolü (VDA1 − VDA2) . . . . . . . . . . . . . . . . . . . . . . . . . 87
Sekil 5.10. Anahtarlama Öncesi Kaynak-PAGF Faz Gerilim ve Akımları,(1): Faz Gerilimi (Va), (2): Kaynak Faz Akımı (Isa), (3): PAGF FazAkımı (IFa) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Sekil 5.11. PAGF Harmonik Kompanzasyon Kaynak-PAGF Faz Gerilim veAkımları (1): Faz Gerilimi (Va), (2): Kaynak Akımı (Isa), (3): PAGFAkımı (IFa) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Sekil 5.12. Kaynak Akımı Spektrumları(50Hz-1500Hz) . . . . . . . . . . . . . . . . . . . . . . 89
Sekil 5.13. Kaynak Akımı Spektrumu (50Hz-50000Hz) . . . . . . . . . . . . . . . . . . . . . . 89
x

Sekil 5.14. PAGF Nötr Akım Regülasyonu, (a) Kompanzasyon ÖncesiKaynak-PAGF Faz Gerilim ve Akımları, (b) KompanzasyonSonrası Kaynak-PAGF Faz Gerilim ve Akımları (1: FazGerilimi (Va), 2: Kaynak Nötr Akımı (Isn), 3: PAGF Nötr Akımı (IFn)) . . 91
xi
SIMGELER VE KISALTMALAR
AA Alternatif Akım
ADC Analog Sayısal Dönüstürücü
AGF Aktif Güç Filtresi
AHS Ayarlanabilir Hızlı Sürücü
ARGT Anlık Reaktif Güç Teorisi
BGKD Birlesik Güç Kalitesi Düzenleyicisi
DA Dogru Akım
DFT Kesikli Fourier Dönüsümü
DGF Düsük Geçirgen Filtre
DGM Darbe Genislik Modülasyonu
DSP Sayısal Sinyal Isleyicisi
EMI Electromagnetic Interference
ESD Esdeger Seri Direnç
FFT Hızlı Fourier Dönüsümü
FKD Faz Kilit Döngü
FPGA Field Programmable Gate Array
GKET-PAGF Gerilim Kaynaklı Evirgeç Tabanlı Paralel Aktif Güç Filtresi
IGBT Insulated Gate Bipolar Transistor
KGK Kesintisiz Güç Kaynagı
OBN Ortak Baglantı Noktası
PAGF Paralel Aktif Güç Filtresi
RDFT Tekrarlamalı Kesikli Fourier Dönüsümü (Recursive DFT)
SAGF Seri Aktif Güç Filtresi
SDGM Sinüzoidal Darbe Genislik Modülasyonu
SRD Senkron Referans Düzlem
THB Toplam Harmonik Bozunum
TTB Toplam Talep Bozunumu
UVDGM Uzay Vektör Darbe Genislik Modülasyonu
xii
SÖZLÜK DIZINIAçık Döngü
Adım Tepkisi
Agır Çevrim
Asagı Yukarı Sayaç
Asma
Asırı Modülasyon
Azaltım
Bant Genisligi
Baz Degeri
DA Bara Faydalanma
Dalgacık
Darbe Akımı
Durgun-Hal
Faz Payı
Geçici Hal
Ileri Besleme
Kaçak-Reaktans
Kapalı Döngü
Karsılastırıcı
Karsılastırma Yazmaçları
Kesme Frekansı
Lamine Bara
Ondalıklama
Oturma Süresi
Ölü-Bant
Örnekleme Frekansı
Referans Takibi
Sanal Direnç
Sönümlendirme
Spektral Sızıntı
Tasıyıcı
Yörünge
: Open Loop
: Step Response
: Heavy Duty
: Up Down Counter
: Overshoot
: Overmodulation
: Attenuation
: Bandwidth
: Base Value
: DC Bus Utilization
: Ripple
: Surge Current
: Steady-State
: Phase Margin
: Transient State
: Feed Forward
: Leakage Reactance
: Closed Loop
: Comparator
: Comparison Registers
: Cut-off Frequency
: Laminated Busbar
: Decimation
: Settling Time
: Dead-Band
: Sampling Frequency
: Reference Tracking
: Virtual Resistor
: Damping
: Spectral Leakage
: Carrier
: Trajectory
xiii
1. GIRIS
Güç elektronigi ve yarıiletken teknolojisindeki gelismeler enerjinin kullanım ve dönü-
sümü alanında yenilikçi ve verimi yüksek elektriksel sistemlerini ortaya çıkısına ola-
nak saglamıstır. Geleneksel yöntemlerin bu gelisim ölçüsünde yerlerini yeni tekno-
lojik ürünlere bırakması getirdigi bir çok avantajın yanında yeni sorunların da ortaya
çıkmasına sebep olmustur. Söz konusu yeni teknoloji elemanlara sahip anahtarla-
malı güç kaynakları, motor sürücüleri, aydınlatma elemanları, köprü dogrultucular
gibi yaygın olarak kullanılan birçok ürün dogrusal olmayan yüklere örnek verilebi-
lir. Dogrusal olmayan yükler dogrusal yüklerden farklı olarak giris frekanslarından
farklı frekansta bilesenlerin ortaya çıkısına sebep olurlar ve bunlara akım-gerilim
harmonikleri adı verilir. Harmonikler sebeke ve kullanıcı tarafında bir çok bozucu
etki yaratıp; reaktif güç, gerilim bozunumu, dengesizlik, fazladan enerji kayıpları ve
sistemlerde erken yaslanmaya baglı fonksiyon ve malzeme kayıplarına yol açmak-
tadır. Bunlar genel anlamda güç kalitesi problemleri olarak adlandırılmakta olup, uy-
gulama türüne ve gereksinimlere göre farklı çözümler söz konusu olabilmektedir [1].
Istikrarlı ve güvenilir bir elektrik sebekesi için ortaya çıkan bozucu etkilerin belli sı-
nırlar dahilinde tutulmaları gerekmektedir. Bu sınırları kullanıcı ve tedarikçi tarafında
belirleyen bir çok ulusal ve uluslarası standart ve yönetmelik mevcuttur [2], [3], [4].
Dogrusal olmayan yüklerin sebekede yarattıgı baslıca sorunlardan olan akım-gerilim
harmonikleri hem harmonigin kaynagı olan kullanıcıyı hem de bu kullanıcıyla aynı
baraya baglı diger kullanıcıları etkileyebilmektedir. Bu etkilesimden kaynaklı ortaya
çıkabilecek problemler harmoniklere yönelik IEEE 519-1992, IEC6400-3-4 gibi özel
standartların olusturulmasına zemin hazırlamıstır [5], [6]. Bu standartlar kullanıcı ve
tedarikçi tarafında uyulması gereken harmonik limitleri belirler. Genel olarak kullanıcı
akım harmoniklerini önerilen limitler dahilinde tutmakla yükümlüyken tedarikçi dagı-
tım seviyesindeki Ortak Baglantı Noktasında (OBN) gerilim harmoniklerini önerilen
limitler dahilinde tutmakla yükümlüdür. IEEE 519-1992 standardında bu limitler be-
lirli harmonikler ve toplam bozunum indislerine göre tanımlanmıstır [7]. Bu bozunum
indislerinden Toplam Harmonik Bozunum (THB), sırasıyla akım ve gerilim sinyalleri
için THBi ve THBv (1.1)’deki gibi tanımlanmıstır.
1
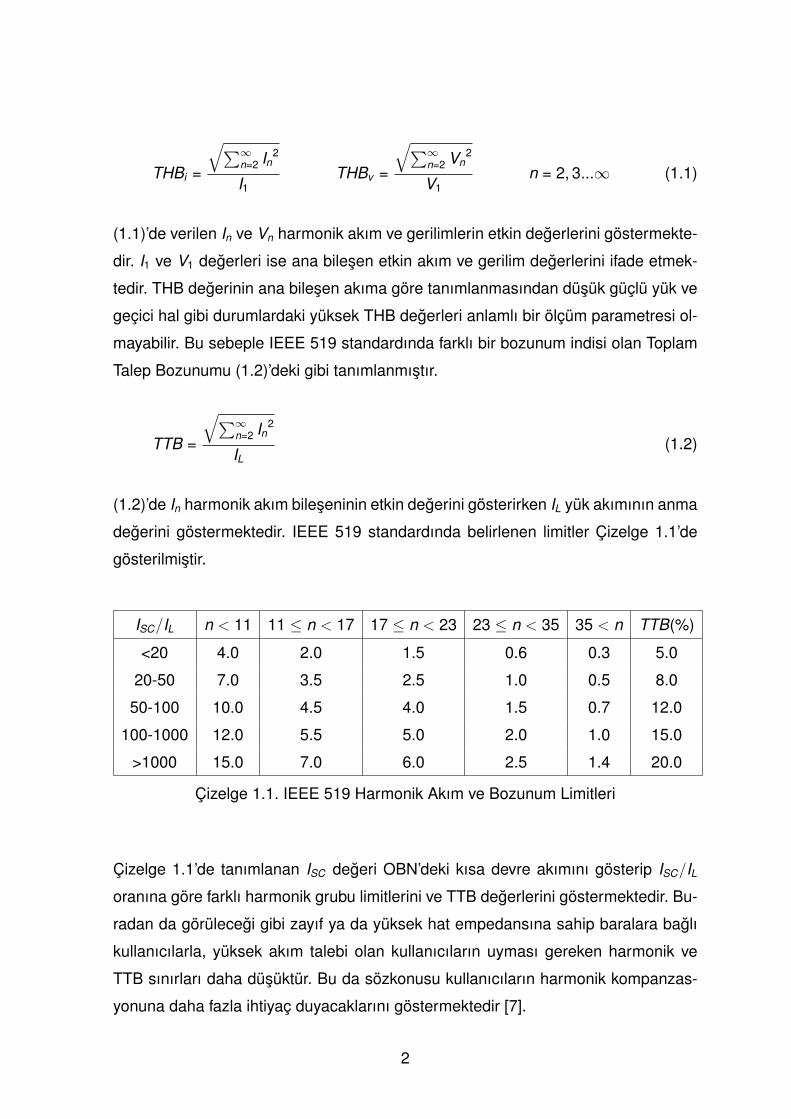
THBi =
√∑∞n=2 In2
I1THBv =
√∑∞n=2 Vn
2
V1n = 2, 3...∞ (1.1)
(1.1)’de verilen In ve Vn harmonik akım ve gerilimlerin etkin degerlerini göstermekte-
dir. I1 ve V1 degerleri ise ana bilesen etkin akım ve gerilim degerlerini ifade etmek-
tedir. THB degerinin ana bilesen akıma göre tanımlanmasından düsük güçlü yük ve
geçici hal gibi durumlardaki yüksek THB degerleri anlamlı bir ölçüm parametresi ol-
mayabilir. Bu sebeple IEEE 519 standardında farklı bir bozunum indisi olan Toplam
Talep Bozunumu (1.2)’deki gibi tanımlanmıstır.
TTB =
√∑∞n=2 In2
IL(1.2)
(1.2)’de In harmonik akım bileseninin etkin degerini gösterirken IL yük akımının anma
degerini göstermektedir. IEEE 519 standardında belirlenen limitler Çizelge 1.1’de
gösterilmistir.
ISC/IL n < 11 11 ≤ n < 17 17 ≤ n < 23 23 ≤ n < 35 35 < n TTB(%)
<20 4.0 2.0 1.5 0.6 0.3 5.0
20-50 7.0 3.5 2.5 1.0 0.5 8.0
50-100 10.0 4.5 4.0 1.5 0.7 12.0
100-1000 12.0 5.5 5.0 2.0 1.0 15.0
>1000 15.0 7.0 6.0 2.5 1.4 20.0
Çizelge 1.1. IEEE 519 Harmonik Akım ve Bozunum Limitleri
Çizelge 1.1’de tanımlanan ISC degeri OBN’deki kısa devre akımını gösterip ISC/IL
oranına göre farklı harmonik grubu limitlerini ve TTB degerlerini göstermektedir. Bu-
radan da görülecegi gibi zayıf ya da yüksek hat empedansına sahip baralara baglı
kullanıcılarla, yüksek akım talebi olan kullanıcıların uyması gereken harmonik ve
TTB sınırları daha düsüktür. Bu da sözkonusu kullanıcıların harmonik kompanzas-
yonuna daha fazla ihtiyaç duyacaklarını göstermektedir [7].
2
Harmoniklerin yarattıgı problemleri en aza indirip bu konudaki yönetmeliklerin yaptı-
rımlarından kaçınmak için çesitli harmonik filtreleme yöntemleri gelistirilmistir.
1.1 Harmonik Filtreleme Yöntemleri
Harmoniklerin filtrelenmesine yönelik gelistirilen yaklasımlar temel olarak; yükün
ürettigi harmonik akımı azaltma ve harmonik akımı üzerine alacak ya da eleyecek
aktif-pasif elemanların kullanılmasını kapsamaktadır.
Bunlardan ilkine yönelik uygulanagelen yöntem faz çoklayıcı dogrultuculardır. Genel
olarak yüksek güç ihtiyacı olan sistemlerde düsük dereceli harmoniklerin elenmesi
için kullanılırlar. Bu sistemler farklı trafo baglantı biçimleri kullanılarak daha fazla
harmonigin elenmesine olanak saglarlar (12-18 darbeli dogrultucular). Ayrıca delta
baglı trafolar ve zig-zag trafolar triplen harmonikleri üzerlerinde tuttuklarından bu tür
uygulamalarda tercih edilirler. Bunların yanında fazladan eklenecek olan hat reak-
törleri ve trafolarda sistemin sebep oldugu harmonik bozunumun düsürülmesinde
kullanılan yöntemlerdir [1], [8].
Harmoniklerin filtrelenmesinde kullanılan daha yaygın yöntem ise pasif ya da aktif
elemanlarla sistemin yarattıgı harmonik bilesenlerin filtrelenmesidir.
Pasif filtreler farklı baglantı biçimleri ve elektriksel elemanlar yardımıyla hem har-
moniklerin süzülmesi hem de güç faktörünün düzenlenmesi adına uzun zamandır
kullanılmaktadırlar. Tasarımlarının kolaylıgı, yüksek verimleri ve maliyet avantajı se-
bebiyle genis bir güç aralıgında uygulamaları devam etmektedir. Buna karsın pasif
harmonik filtreler belli harmonik bilesenler için tasarlanırlar ve de filtrelenecek har-
monik sayısı kadar ayrı birim gerektirirler. Bu da genis spektrumlu harmonik öge
içeren yüklerin kompanzasyonunda yetersiz kalmalarına sebep olmaktadır. Pasif filt-
relerde kullanılan reaktörlerin ve kapasitör bankalarının degerlerinin zamana baglı
olarak degisim göstermeleri filtre performansını düsüren etkenlerdendir. Bunların ya-
nında sebekenin seri empedansı sebebiyle rezonans riski de tasımaktadırlar, bun-
dan kaynaklı kurulum yapılan yerin sebeke karakteristigi de öncesinde incelenmek
durumundadır. Pasif filtreler yukarıda bahsedilen dezavantajları ve kullanım oranları
artan genis spektrumlu harmonik bilesenlere sahip dinamik yükler sebebiyle yerle-
rini aktif güç filtrelerine bırakmaktadırlar [9].
3
1.2 Aktif Güç Filtreleri
Aktif Güç Filtreleri (AGF) çesitli pasif elemanlar, anahtarlama elemanları, sayısal
kontrol birimleri gibi farklı yapılardan olusan; harmonik filtreleme, reaktif güç kom-
panzasyonu, yük dengeleme, nötr akım regülasyonu, gerilim regülasyonu ve rezo-
nansların bastırılması gibi bir çok güç kalitesi problemine çözüm sunabilen modern
teknolojiye dayalı araçlardır.
Özellikle anahtarlama elemanlarında (Tristör, MOSFET, IGBT) meydana gelen ge-
lismeler aktif filtrelerin uygulamalarını mümkün hale getirmistir. Bununla eszamanlı
gelisen entegre devre teknolojisi (DSP, FPGA, ADC) ile hassas ölçüm alınabilen
sensörlerin gelisimi etkin bir kontrol sisteminin olusturulup filtre fonksiyonlarının art-
masına ve performansının yükselmesine olanak saglamıstır [9].
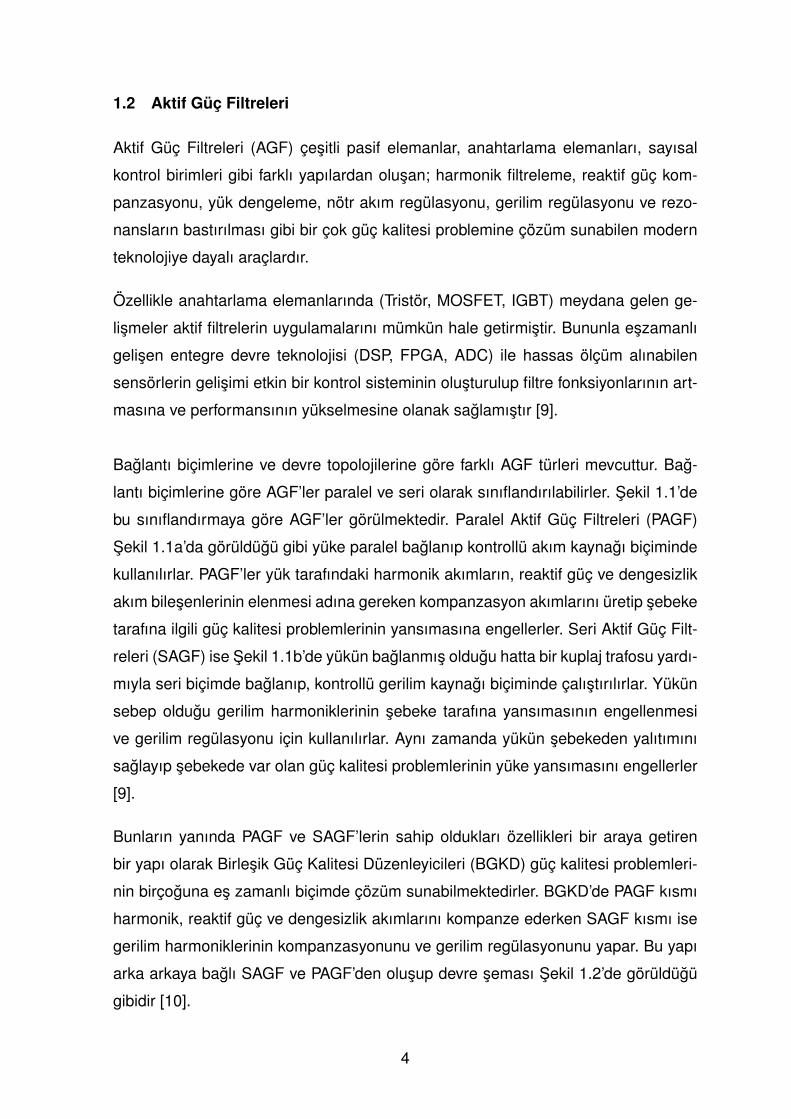
Baglantı biçimlerine ve devre topolojilerine göre farklı AGF türleri mevcuttur. Bag-
lantı biçimlerine göre AGF’ler paralel ve seri olarak sınıflandırılabilirler. Sekil 1.1’de
bu sınıflandırmaya göre AGF’ler görülmektedir. Paralel Aktif Güç Filtreleri (PAGF)
Sekil 1.1a’da görüldügü gibi yüke paralel baglanıp kontrollü akım kaynagı biçiminde
kullanılırlar. PAGF’ler yük tarafındaki harmonik akımların, reaktif güç ve dengesizlik
akım bilesenlerinin elenmesi adına gereken kompanzasyon akımlarını üretip sebeke
tarafına ilgili güç kalitesi problemlerinin yansımasına engellerler. Seri Aktif Güç Filt-
releri (SAGF) ise Sekil 1.1b’de yükün baglanmıs oldugu hatta bir kuplaj trafosu yardı-
mıyla seri biçimde baglanıp, kontrollü gerilim kaynagı biçiminde çalıstırılırlar. Yükün
sebep oldugu gerilim harmoniklerinin sebeke tarafına yansımasının engellenmesi
ve gerilim regülasyonu için kullanılırlar. Aynı zamanda yükün sebekeden yalıtımını
saglayıp sebekede var olan güç kalitesi problemlerinin yüke yansımasını engellerler
[9].
Bunların yanında PAGF ve SAGF’lerin sahip oldukları özellikleri bir araya getiren
bir yapı olarak Birlesik Güç Kalitesi Düzenleyicileri (BGKD) güç kalitesi problemleri-
nin birçoguna es zamanlı biçimde çözüm sunabilmektedirler. BGKD’de PAGF kısmı
harmonik, reaktif güç ve dengesizlik akımlarını kompanze ederken SAGF kısmı ise
gerilim harmoniklerinin kompanzasyonunu ve gerilim regülasyonunu yapar. Bu yapı
arka arkaya baglı SAGF ve PAGF’den olusup devre seması Sekil 1.2’de görüldügü
gibidir [10].
4
IYÜKIFAZ
IF LTRE
3-FAZ
ŞEBEKE
DOĞRUSAL
OLMAYAN YÜK IYÜKDOĞRUSAL
OLMAYAN YÜKIFAZ3-FAZ
ŞEBEKEVF LTRE
(a) (b)
Sekil 1.1. AGF Baglantı Topolojileri, (a) Paralel Aktif Güç Filtresi, (b) Seri Aktif GüçFiltresi
DOĞRUSAL
OLMAYAN YÜKIFAZ
3-FAZ
ŞEBEKEVF LTRE
IF LTRE
IYÜK
Sekil 1.2. Birlesik Güç Kalitesi Düzenleyicisi
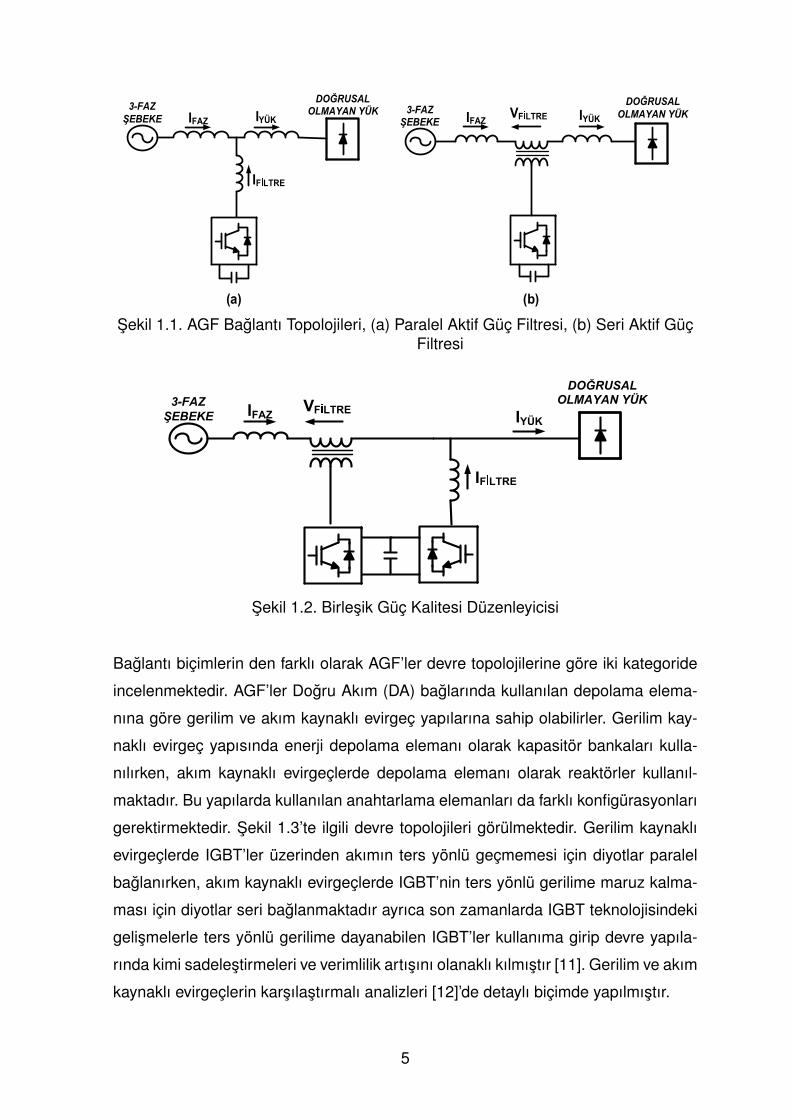
Baglantı biçimlerin den farklı olarak AGF’ler devre topolojilerine göre iki kategoride
incelenmektedir. AGF’ler Dogru Akım (DA) baglarında kullanılan depolama elema-
nına göre gerilim ve akım kaynaklı evirgeç yapılarına sahip olabilirler. Gerilim kay-
naklı evirgeç yapısında enerji depolama elemanı olarak kapasitör bankaları kulla-
nılırken, akım kaynaklı evirgeçlerde depolama elemanı olarak reaktörler kullanıl-
maktadır. Bu yapılarda kullanılan anahtarlama elemanları da farklı konfigürasyonları
gerektirmektedir. Sekil 1.3’te ilgili devre topolojileri görülmektedir. Gerilim kaynaklı
evirgeçlerde IGBT’ler üzerinden akımın ters yönlü geçmemesi için diyotlar paralel
baglanırken, akım kaynaklı evirgeçlerde IGBT’nin ters yönlü gerilime maruz kalma-
ması için diyotlar seri baglanmaktadır ayrıca son zamanlarda IGBT teknolojisindeki
gelismelerle ters yönlü gerilime dayanabilen IGBT’ler kullanıma girip devre yapıla-
rında kimi sadelestirmeleri ve verimlilik artısını olanaklı kılmıstır [11]. Gerilim ve akım
kaynaklı evirgeçlerin karsılastırmalı analizleri [12]’de detaylı biçimde yapılmıstır.
5
(a)
CDA
LDA
(b)
Sekil 1.3. AGF Evirgeç Topolojileri, (a) Gerilim Kaynaklı Evirgeç, (b) Akım KaynaklıEvirgeç
Bu tez kapsamında Gerilim Kaynaklı Evirgeç Tabanlı Paralel Aktif Güç Filtreleri(GKET-
PAGF) inceleneceginden, bu topolojinin üzerinde durulacaktır.
1.3 Gerilim Kaynaklı Evirgeç Tabanlı Paralel Aktif Güç Filtreleri (GKET-PAGF)
GKET-PAGF’ler harmonik akım kaynagı olarak çalıstırılıp yükün çektigi harmonik
akımların tersini OBN’ye basarak harmonik bilesenlere sahip akımın sebeke tara-
fından çekilmesini engeller ya da bu akımı azaltırlar. Benzer biçimde reaktif bilesen
akımların ve fazlardan dengesiz olarak çekilen akımın kompanzasyonunu da sag-
larlar. Sistem bu fonksiyonları temel olarak sayısal sinyal isleyici ve analog ölçüm
birimlerinden olusan bir kontrol sistemi, yarı-iletkenler ve pasif elemanlardan olusan
bir güç katı ile sistemle OBN arasında yer alan yüksek frekansı süzen bir arayüz
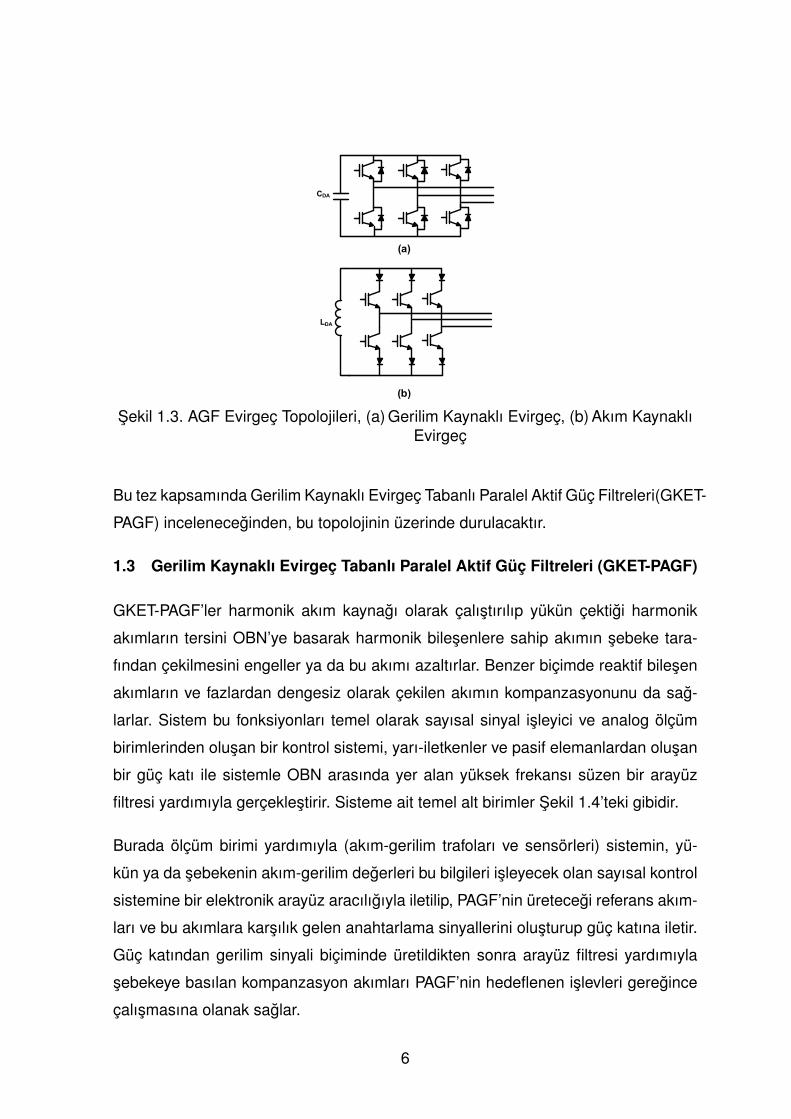
filtresi yardımıyla gerçeklestirir. Sisteme ait temel alt birimler Sekil 1.4’teki gibidir.
Burada ölçüm birimi yardımıyla (akım-gerilim trafoları ve sensörleri) sistemin, yü-
kün ya da sebekenin akım-gerilim degerleri bu bilgileri isleyecek olan sayısal kontrol
sistemine bir elektronik arayüz aracılıgıyla iletilip, PAGF’nin üretecegi referans akım-
ları ve bu akımlara karsılık gelen anahtarlama sinyallerini olusturup güç katına iletir.
Güç katından gerilim sinyali biçiminde üretildikten sonra arayüz filtresi yardımıyla
sebekeye basılan kompanzasyon akımları PAGF’nin hedeflenen islevleri geregince
çalısmasına olanak saglar.
6
Doğrusal Olmayan
Yük3 Faz Şebeke
ArayüzFiltresi
Kontrol Sistemi
Iref
V-I Ölçüm
Iyük
Ifiltre
GKET-PAGF
Ifaz
Güç Katı
Sekil 1.4. Paralel Aktif Güç Filtresi Temel Birimleri
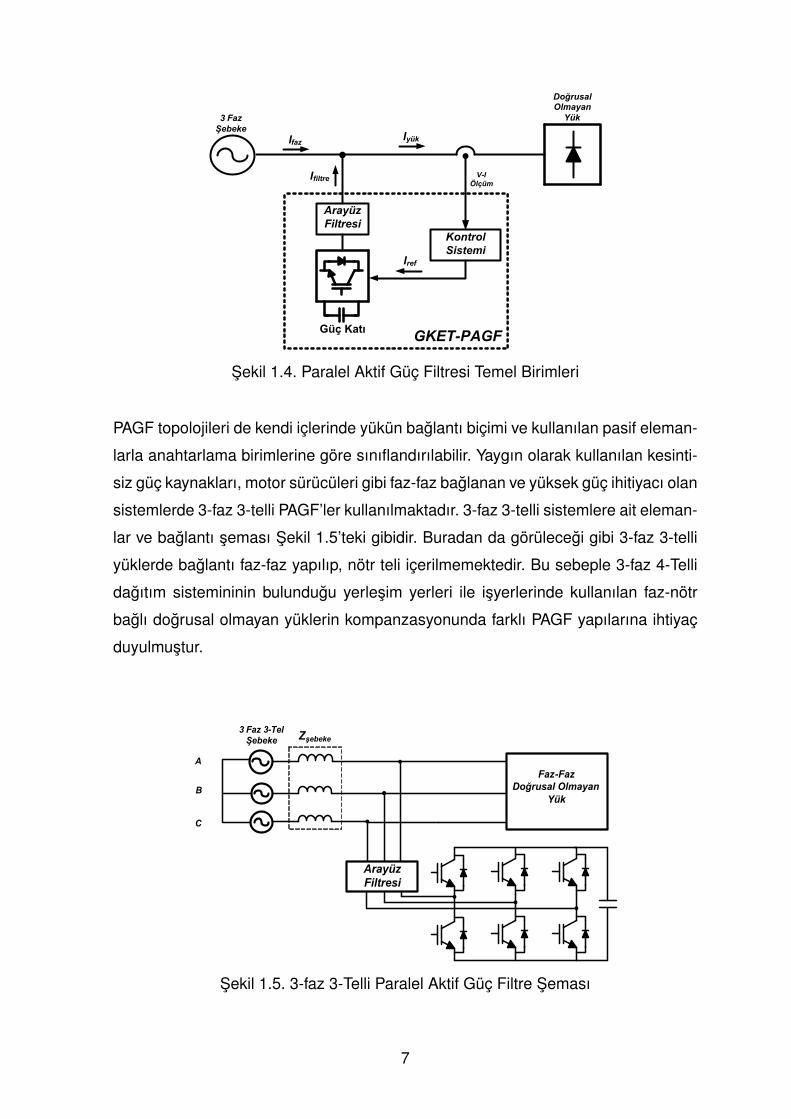
PAGF topolojileri de kendi içlerinde yükün baglantı biçimi ve kullanılan pasif eleman-
larla anahtarlama birimlerine göre sınıflandırılabilir. Yaygın olarak kullanılan kesinti-
siz güç kaynakları, motor sürücüleri gibi faz-faz baglanan ve yüksek güç ihitiyacı olan
sistemlerde 3-faz 3-telli PAGF’ler kullanılmaktadır. 3-faz 3-telli sistemlere ait eleman-
lar ve baglantı seması Sekil 1.5’teki gibidir. Buradan da görülecegi gibi 3-faz 3-telli
yüklerde baglantı faz-faz yapılıp, nötr teli içerilmemektedir. Bu sebeple 3-faz 4-Telli
dagıtım sistemininin bulundugu yerlesim yerleri ile isyerlerinde kullanılan faz-nötr
baglı dogrusal olmayan yüklerin kompanzasyonunda farklı PAGF yapılarına ihtiyaç
duyulmustur.
3 Faz 3-Tel Şebeke
ArayüzFiltresi
Zşebeke
Faz-Faz
Doğrusal Olmayan
Yük
A
B
C
Sekil 1.5. 3-faz 3-Telli Paralel Aktif Güç Filtre Seması
7
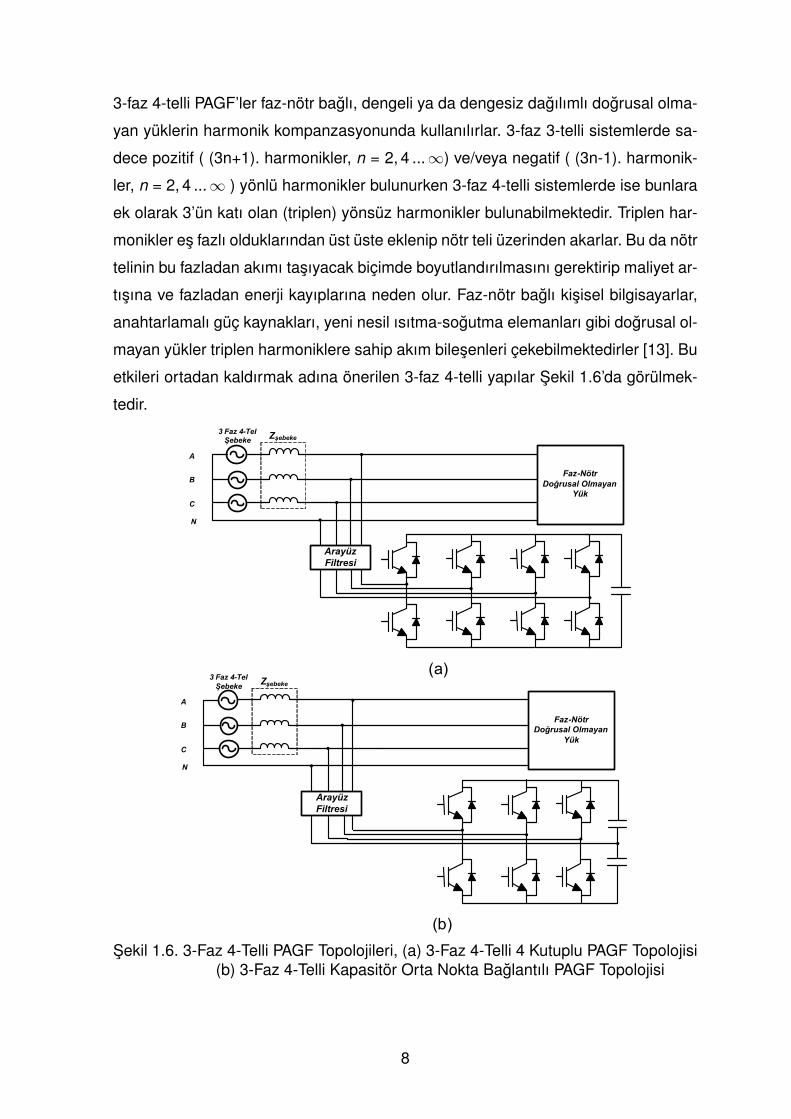
3-faz 4-telli PAGF’ler faz-nötr baglı, dengeli ya da dengesiz dagılımlı dogrusal olma-
yan yüklerin harmonik kompanzasyonunda kullanılırlar. 3-faz 3-telli sistemlerde sa-
dece pozitif ( (3n+1). harmonikler, n = 2, 4 ...∞) ve/veya negatif ( (3n-1). harmonik-
ler, n = 2, 4 ...∞ ) yönlü harmonikler bulunurken 3-faz 4-telli sistemlerde ise bunlara
ek olarak 3’ün katı olan (triplen) yönsüz harmonikler bulunabilmektedir. Triplen har-
monikler es fazlı olduklarından üst üste eklenip nötr teli üzerinden akarlar. Bu da nötr
telinin bu fazladan akımı tasıyacak biçimde boyutlandırılmasını gerektirip maliyet ar-
tısına ve fazladan enerji kayıplarına neden olur. Faz-nötr baglı kisisel bilgisayarlar,
anahtarlamalı güç kaynakları, yeni nesil ısıtma-sogutma elemanları gibi dogrusal ol-
mayan yükler triplen harmoniklere sahip akım bilesenleri çekebilmektedirler [13]. Bu
etkileri ortadan kaldırmak adına önerilen 3-faz 4-telli yapılar Sekil 1.6’da görülmek-
tedir.3 Faz 4-Tel Şebeke
Arayüz
Filtresi
Zşebeke
Faz-Nötr
Doğrusal Olmayan
Yük
A
B
C
N
3 Faz 4-Tel
Şebeke
Arayüz
Filtresi
Zşebeke
Faz-Nötr
Doğrusal Olmayan
Yük
A
B
C
N
(a)
(b)
Sekil 1.6. 3-Faz 4-Telli PAGF Topolojileri, (a) 3-Faz 4-Telli 4 Kutuplu PAGF Topolojisi(b) 3-Faz 4-Telli Kapasitör Orta Nokta Baglantılı PAGF Topolojisi
8
Sekil 1.6a’da görülen 3 faz 4 telli yapı, pozitif ve negatif yönlü harmoniklerin yanı
sıra nötr teline baglı fazladan eklenmis anahtarlama elemanlarıyla yönsüz (triplen)
harmoniklerin elenip nötr teli üzerinden geçen akımın kompanzasyonunu saglar. Bu
yapının standart 3 kutup anahtarlama elemanı tasıyan evirgeç yapılarına göre kimi
avantaj ve dezavantajları mevcuttur. Aynı büyüklükteki akım harmoniklerinin üretil-
mesi için gereken DA bag gerilimi %15-20 oranında daha düsüktür. Bu durum, yön-
süz harmoniklerin kontrolünü saglayan 4. anahtarlama kutbunun ürettigi yönsüz har-
moniklerle, bu harmoniklerin üst üste binerek olusturdugu faz-faz gerilim degerinin
düsürülmesini mümkün kılmasıdır. Bu sayede DA bag kapasitörlerin anma gerilim-
leri ve sıga degerlerinin düsürülmesi mümkün olmaktadır. Ayrıca DA bag kapasitör-
lerinin üzerinden geçen düsük etkin degerli AA akım nedeniyle kapasitör kullanım
adedinin düsmesini saglamaktadır. Bunlara karsın fazladan eklenen anahtarlama
elemanından kaynaklı maliyetin yükselmesine ve anahtarlama kayıplarının artma-
sına sebep olmaktadır. Bunlara ek olarak sisteme ilave edilen 4. anahtarlama kutbu
nedeniyle evirgecin kontrolü zorlasmaktadır [14], [15].
Sekil 1.6b’de görülen 3-Faz 4 telli kapasitör orta nokta baglatılı yapıyla Sekil 1.6a’daki
topolojiye benzer biçimde kompanzasyon islevleri gerçeklestirip yönsüz harmonikler
için 4. bir anahtarlama kutbu kullanmak yerine nötr teli kapasitörlerin orta noktasına
baglanmıstır. Bu yapıda yönsüz harmonikler direkt olarak DA bag kapasitörlerinin
üzerinden geçmekte olup bu akımların kapasitörler üzerinden geçisi DA bag kapa-
sitörlerinin dalgacık akım tasıma kapasitelerinin sınırlı olması sebebiyle paralel kol-
lara bölünmesini, dolayısıyla DA bag kapasitörlerin ihtiyaç duyulan sıga degerlerinin
ötesinde boyutlandırılmasına sebep olmaktadır. Buna ek olarak DA bag kapasitörle-
rinin üretiminden kaynaklanan ve ayrık kapasitörler arasında kaçak akım farklılıkları
sebebiyle olusan gerilim dengesizliginin artısına sebep olmakta ve sonuç olarak filt-
releme performansını düsürmektedir. Bunlara karsın kapasitör orta nokta baglantılı
topoloji düsen anahtarlama eleman sayısı ve anahtarlama kayıpları, konvansiyonel
3-kutuplu yapısı sebebiyle modül biçiminde kolay temin edilebiliyor olusları ve kont-
rol sistemlerinin kolaylıgından ötürü tercih edilmektedirler [14], [16].
1.4 Tezin Amacı ve Içerigi
Bu tez kapsamında harmoniklerin sebep oldugu problemleri ortadan kaldırmak adına
kullanılan aktif güç filtrelerinden gerilim kaynaklı evirgeç tabanlı 3-faz 4-telli PAGF’nin
9
tasarım, benzetim ve gerçeklestirim çalısmalarına yer verilmistir. Tasarım ve gerçek-
lestirimi yapılacak olan PAGF alçak gerilim barasına dogrudan baglanabilecek olup
kapasitör orta nokta baglantılı yapıda 60A faz akımını üretebilecek sekilde tasarlan-
mıstır. DSP tabanlı elektronik bir sistem yardımıyla kontrol edilen PAGF’nin olustu-
rulan test düzenegi yardımıyla kompanzasyon basarımı test edilmistir.
Bölüm 2’de PAGF’nin öncelikle uygulanabilirlik kosulları ele alınıp farklı tipteki yük-
ler üzerindeki kompanzasyon performansları incelenmis ve bu performansın arttı-
rılması için yapılabilecek degisikliklerden bahsedilmistir. Devam eden alt bölümde
PAGF’lerin referans çıkartım yöntemleri zaman ve frekans alanlı yöntem baslıkla-
rında incelenmis ve karsılastırmaları yapılmıstır. PAGF akım kontrolü baslıgında ise
kullanılan DA bag gerilim ve PAGF akım kontrolü yöntemlerine ait detaylar ve uy-
gulama esaslarına deginilmistir. Modülasyon yöntemleri konusunda yaygın olarak
kullanılan SDGM ve UVDGM yöntemleri incelenip karsılastırmaları yapılmıs ve özel-
likle UVDGM yönteminin kullanılan evirgeç topolojisiyle beraber kullanım detaylarına
ve sayısal ortam uygulama detaylarına yer verilmistir. Arayüz filtrelerinin incelendigi
baslıkta standart L tipi filtrelere göre bir çok açıdan avantajlı olan LCL filtrelere yö-
nelik analiz ve tasarım baslıklarına deginilmistir.
Bölüm 3’te PAGF anma degerlerine göre sistem bilesen degerlerinin belirlenmesi ve
lamine bara modelinin olusturulmasına yönelik çalısmalar yapılmıs ve benzetim ile
gerçeklestirim asamasında kullanılacak sistem degiskenleri belirlenmistir.
Bölüm 4’te PAGF’nin belirli sebeke ve yük kosullarında olusturulan benzetim mode-
liyle ilgili islevsel bloklarının ve bir bütün olarak sistemin kompanzasyon basarımı
incelenmistir.
Bölüm 5’te ise olusturulan test düzenegi yardımıyla alınan deneysel sonuçlar deger-
lendirilmistir.
Bölüm 6’da ise tezin genel bir özetinin ardından tez çalısması dahilinde kullanılan
ve tasıdıkları avantajlardan ötürü öne çıkan yöntemlere deginilip, gelecekte sistem
üzerinde yapılabilecek iyilestirmelere ve sistemin kompanzasyon basarımına dair
degerledirmelere yer verilmistir.
10
2. PARALEL AKTIF GÜÇ FILTRELERININ ANALIZI VE ÇALISMAPRENSIPLERI
Bu bölümde Paralel Aktif Güç Filtrelerinin (PAGF) bir bütün olarak; yük çesitlerine
göre uygulanabilirlik durumları, harmonik eleme, reaktif güç kompanzasyonu ve den-
gesizlik durumlarındaki kontrol ve referans çıkarım yöntemleri ele alınıp karsılastır-
malı analizlerine yer verilmistir.
2.1 Dogrusal Olmayan Yük Çesitleri
PAGF’ler islevlerini kompanzasyonu yapılacak olan yüklerden ve sebeke karakte-
ristiginden bagımsız olarak yerine getirememektedirler. Bu sebeple yükün karakte-
ristigi kompanzasyonun islevselligi açısından önem kazanmaktadır. Akım ve gerilim
harmoniklerinin ortaya çıkmasına sebep olan dogrusal olmayan yükler akım ve geri-
lim karakteristikleri gözetilerek iki ana baslıkta incelenebilirler. Bunlar harmonik akım
ve harmonik gerilim kaynagı olan yüklerdir.
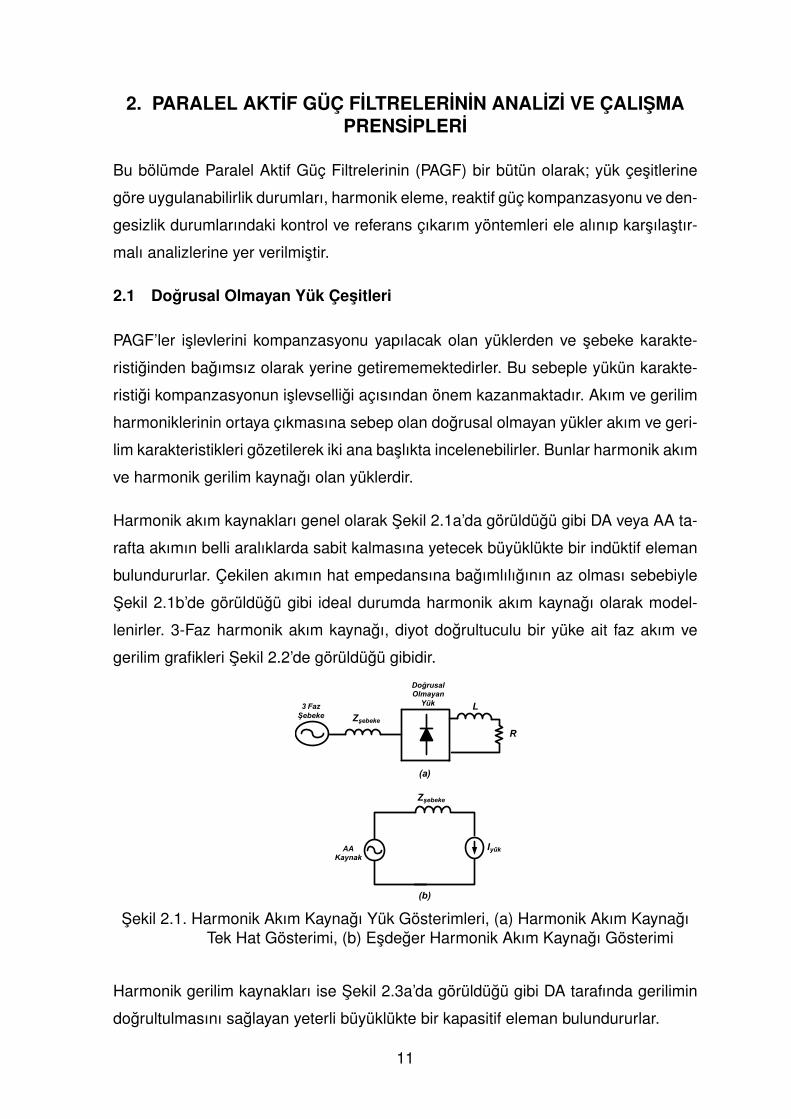
Harmonik akım kaynakları genel olarak Sekil 2.1a’da görüldügü gibi DA veya AA ta-
rafta akımın belli aralıklarda sabit kalmasına yetecek büyüklükte bir indüktif eleman
bulundururlar. Çekilen akımın hat empedansına bagımlılıgının az olması sebebiyle
Sekil 2.1b’de görüldügü gibi ideal durumda harmonik akım kaynagı olarak model-
lenirler. 3-Faz harmonik akım kaynagı, diyot dogrultuculu bir yüke ait faz akım ve
gerilim grafikleri Sekil 2.2’de görüldügü gibidir.
Iyük
(a)
AA Kaynak
Zşebeke
Doğrusal Olmayan
Yük L
R
3 Faz
Şebeke Zşebeke
(b)
Sekil 2.1. Harmonik Akım Kaynagı Yük Gösterimleri, (a) Harmonik Akım KaynagıTek Hat Gösterimi, (b) Esdeger Harmonik Akım Kaynagı Gösterimi
Harmonik gerilim kaynakları ise Sekil 2.3a’da görüldügü gibi DA tarafında gerilimin
dogrultulmasını saglayan yeterli büyüklükte bir kapasitif eleman bulundururlar.
11
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
(a)
(b)
Sekil 2.2. Harmonik Akım Kaynagı Dalga Biçimleri, (a) Harmonik Akım KaynagıGerilim Dalga Biçimi, (b) Harmonik Akım Kaynagı Akım Dalga Biçimi
Çekilen akımın hat empedansına baglı olarak genliginin ve harmonik içeriginin de-
gismesine karsın gerilim karakteristiginin daha az degisim göstermesi sebebiyle, Se-
kil 2.3b’de görüldügü gibi ideal durumda gerilim kaynagı olarak modellenirler. 3-Faz
harmonik gerilim kaynagı bir diyot dogrultuculu yüke ait faz akım ve gerilim grafikleri
Sekil 2.4’te görüldügü gibidir.
Vyük
(a)
AA Kaynak
Zşebeke
Doğrusal Olmayan
Yük
C R
3 Faz
Şebeke Zşebeke
(b)
Sekil 2.3. Harmonik Gerilim Kaynagı Yük Gösterimleri, (a) Harmonik GerilimKaynagı Tek Hat Gösterimi, (b) Esdeger Harmonik Gerilim Kaynagı
Gösterimi
Yukarıda incelenen yük modellerinden harmonik akım kaynaklarının ve bu yüklerin
kompanzasyonu için kullanılan PAGF’lerin modelleri Sekil 2.5’te görüldügü gibidir.
Burada yük için kullanılan Norton esdeger devre modelinde ZY esdeger yük empe-
dansını, Ih esdeger harmonik akım kaynagını, IPAGF filtre akımını G PAGF’nin es-
deger transfer fonksiyonunu ve ZHat ise hat empedansını göstermektedir. PAGF’ler
harmonik akım kaynagı olarak çalıstırıldıklarından model gösterimleri akım kaynagı
12
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
(a)
(b)
Sekil 2.4. Harmonik Gerilim Kaynagı Dalga Biçimleri, (a) Harmonik Gerlim KaynagıGerilim Dalga Biçimi, (b) Harmonik Gerilim Kaynagı Akım Dalga Biçimi
biçiminde olup, yük akımıyla olan iliskisi asagıdaki gibidir.
IPAGF = G(s)IY (2.1)
Burada G(s) ideal olarak elenmek istenen harmonik frekanslarda |G|h = 1 biçiminde
olup tek bant geçirgen filtre karakteristigine sahiptir. Ana bilesen frekansta (50Hz)
ise evirgecin güç kayıplarını karsılamak için üretilen akım referansı dısında akım
üretmez yani ideal olarak |G|50Hz = 0 degerine sahiptir. Bu varsayımlarla PAGF’nin
ilgili sistem parametrelerine göre transfer karakteristigi temel devre analiziyle asagı-
daki esitlikler yoluyla ifade edilebilir.
IPAGF
ZHat
G ZY Ih
3-FazŞebeke
Paralel AktifGüç Filtresi
Harmonik AkımKaynağı
IYIFaz
VFaz
Sekil 2.5. Harmonik Akım Kaynagı ve Paralel Aktif Güç Filtresi Temel Gösterimi
13
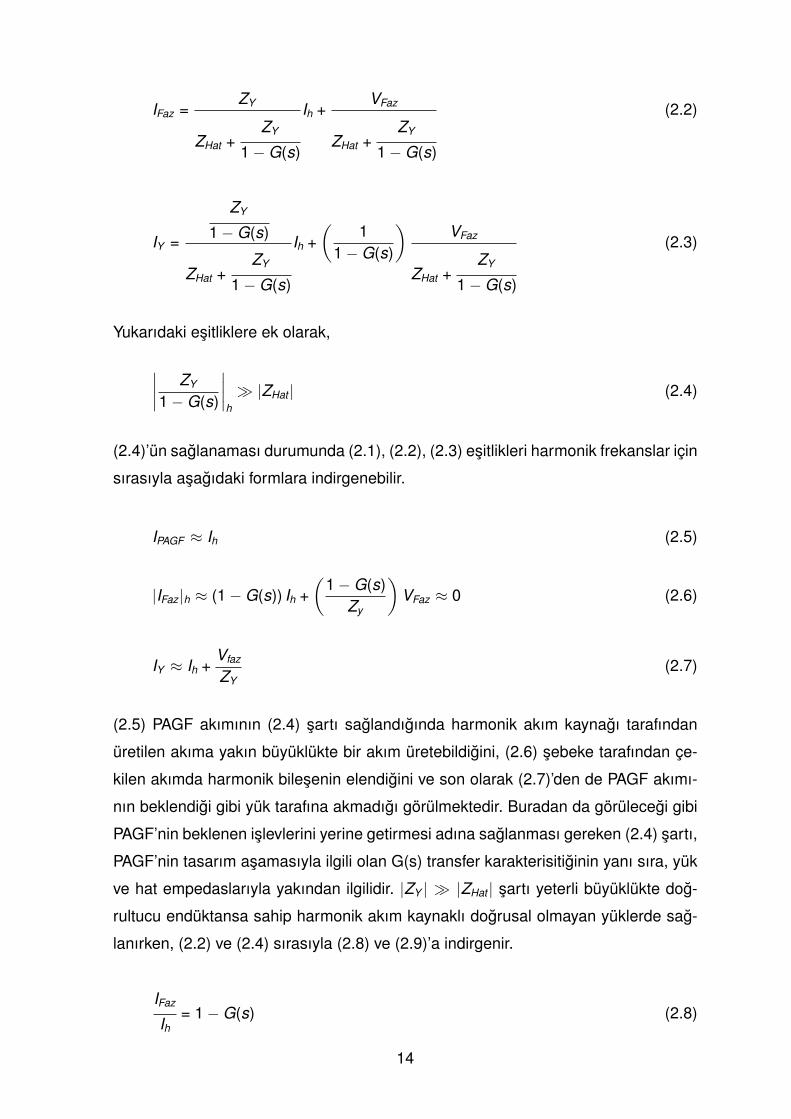
IFaz =ZY
ZHat +ZY
1−G(s)
Ih +VFaz
ZHat +ZY
1−G(s)
(2.2)
IY =
ZY
1−G(s)
ZHat +ZY
1−G(s)
Ih +(
11−G(s)
)VFaz
ZHat +ZY
1−G(s)
(2.3)
Yukarıdaki esitliklere ek olarak,
∣∣∣∣ ZY
1−G(s)
∣∣∣∣h |ZHat | (2.4)
(2.4)’ün saglanaması durumunda (2.1), (2.2), (2.3) esitlikleri harmonik frekanslar için
sırasıyla asagıdaki formlara indirgenebilir.
IPAGF ≈ Ih (2.5)
|IFaz |h ≈ (1−G(s)) Ih +(
1−G(s)Zy
)VFaz ≈ 0 (2.6)
IY ≈ Ih +Vfaz
ZY(2.7)
(2.5) PAGF akımının (2.4) sartı saglandıgında harmonik akım kaynagı tarafından
üretilen akıma yakın büyüklükte bir akım üretebildigini, (2.6) sebeke tarafından çe-
kilen akımda harmonik bilesenin elendigini ve son olarak (2.7)’den de PAGF akımı-
nın beklendigi gibi yük tarafına akmadıgı görülmektedir. Buradan da görülecegi gibi
PAGF’nin beklenen islevlerini yerine getirmesi adına saglanması gereken (2.4) sartı,
PAGF’nin tasarım asamasıyla ilgili olan G(s) transfer karakterisitiginin yanı sıra, yük
ve hat empedaslarıyla yakından ilgilidir. |ZY | |ZHat | sartı yeterli büyüklükte dog-
rultucu endüktansa sahip harmonik akım kaynaklı dogrusal olmayan yüklerde sag-
lanırken, (2.2) ve (2.4) sırasıyla (2.8) ve (2.9)’a indirgenir.
IFaz
Ih= 1−G(s) (2.8)
14
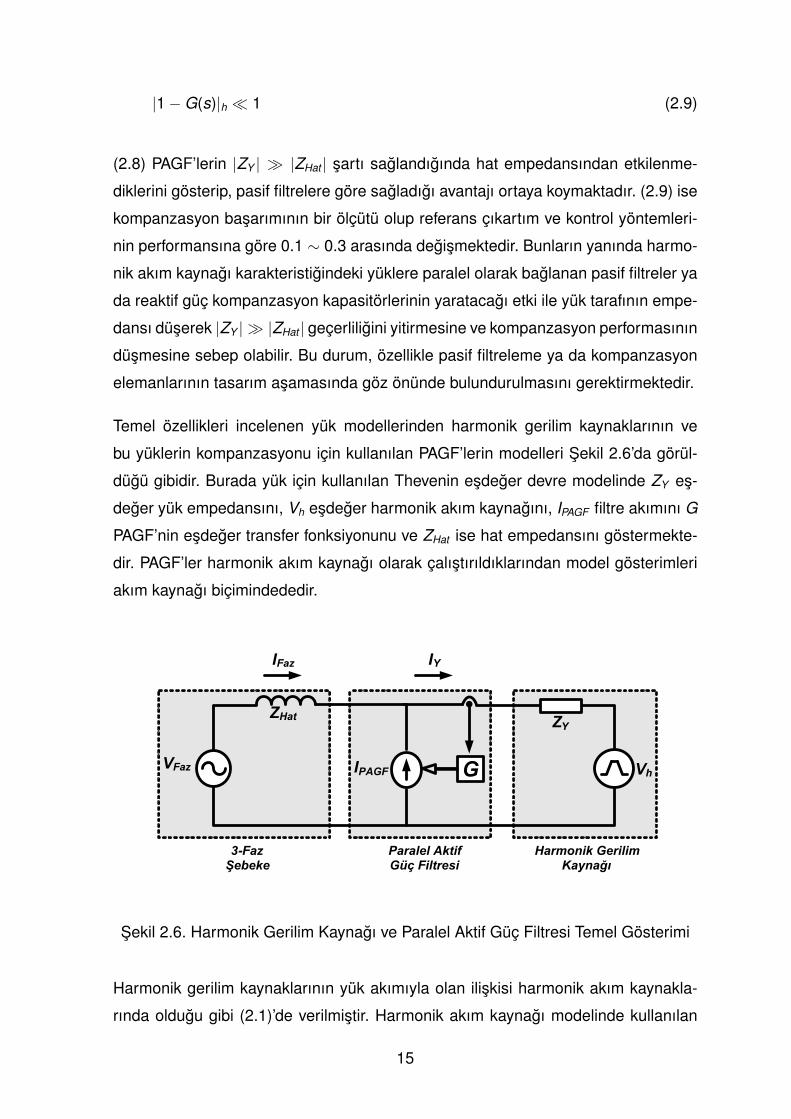
|1−G(s)|h 1 (2.9)
(2.8) PAGF’lerin |ZY | |ZHat | sartı saglandıgında hat empedansından etkilenme-
diklerini gösterip, pasif filtrelere göre sagladıgı avantajı ortaya koymaktadır. (2.9) ise
kompanzasyon basarımının bir ölçütü olup referans çıkartım ve kontrol yöntemleri-
nin performansına göre 0.1 ∼ 0.3 arasında degismektedir. Bunların yanında harmo-
nik akım kaynagı karakteristigindeki yüklere paralel olarak baglanan pasif filtreler ya
da reaktif güç kompanzasyon kapasitörlerinin yaratacagı etki ile yük tarafının empe-
dansı düserek |ZY | |ZHat | geçerliligini yitirmesine ve kompanzasyon performasının
düsmesine sebep olabilir. Bu durum, özellikle pasif filtreleme ya da kompanzasyon
elemanlarının tasarım asamasında göz önünde bulundurulmasını gerektirmektedir.
Temel özellikleri incelenen yük modellerinden harmonik gerilim kaynaklarının ve
bu yüklerin kompanzasyonu için kullanılan PAGF’lerin modelleri Sekil 2.6’da görül-
dügü gibidir. Burada yük için kullanılan Thevenin esdeger devre modelinde ZY es-
deger yük empedansını, Vh esdeger harmonik akım kaynagını, IPAGF filtre akımını G
PAGF’nin esdeger transfer fonksiyonunu ve ZHat ise hat empedansını göstermekte-
dir. PAGF’ler harmonik akım kaynagı olarak çalıstırıldıklarından model gösterimleri
akım kaynagı biçimindededir.
IPAGF
ZHat
G
ZY
Vh
3-FazŞebeke
Paralel AktifGüç Filtresi
Harmonik GerilimKaynağı
IYIFaz
VFaz
Sekil 2.6. Harmonik Gerilim Kaynagı ve Paralel Aktif Güç Filtresi Temel Gösterimi
Harmonik gerilim kaynaklarının yük akımıyla olan iliskisi harmonik akım kaynakla-
rında oldugu gibi (2.1)’de verilmistir. Harmonik akım kaynagı modelinde kullanılan
15
temel varsayımlarla yapılan devre analizi neticesinde sistem parametreleri asagı-
daki esitlikler yoluyla ifade edilebilir.
IFaz =VFaz − VY
ZHat +ZY
1−G(s)
(2.10)
IY =VFaz − VY
ZHat (1−G(s)) + ZY(2.11)
(2.10)’da verilen ifadenin sinüzoidal forma indirgenmesi için asagıdaki esitligin sag-
lanıyor olması gerekmektedir.
∣∣∣∣ZHat +ZY
1−G(s)
∣∣∣∣h 1 (2.12)
Esitlik (2.12) saglandıgında (2.1), (2.10), (2.11) esitlikleri sırasıyla asagıdaki formlara
indirgenebilir.
IPAGF ≈ Ih (2.13)
|IFaz |h ≈ 0 (2.14)
IY ≈Vfaz − VY
ZY(2.15)
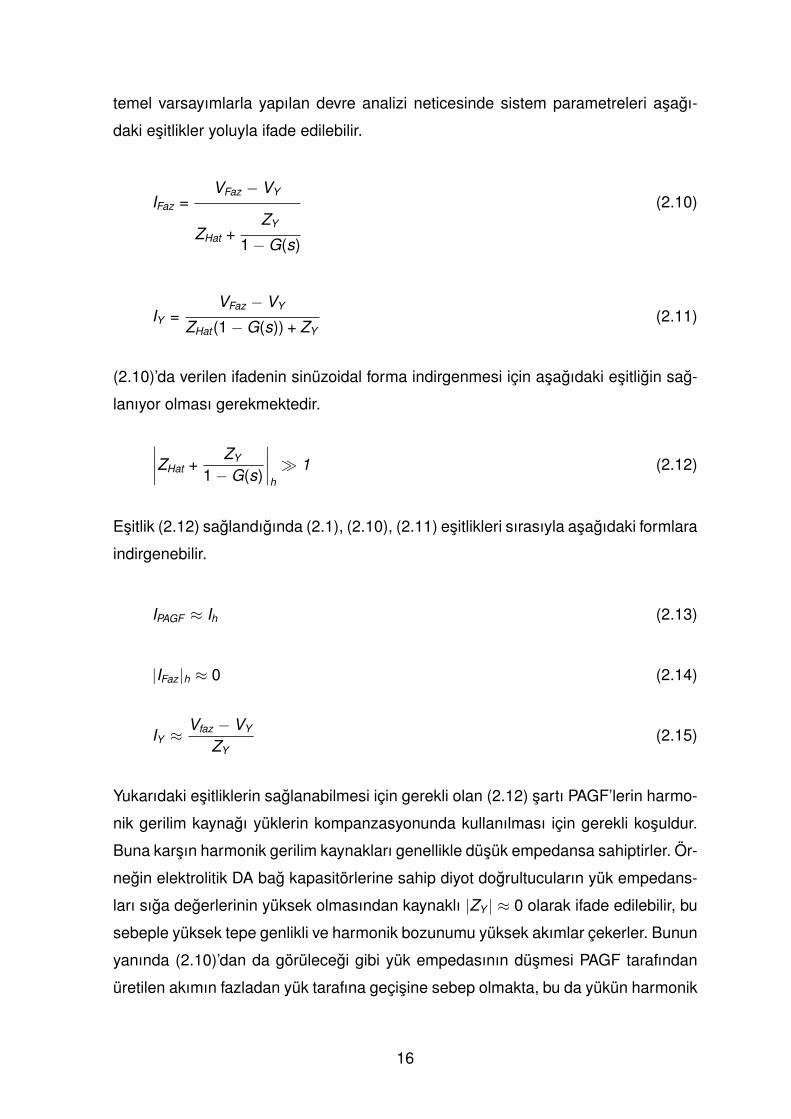
Yukarıdaki esitliklerin saglanabilmesi için gerekli olan (2.12) sartı PAGF’lerin harmo-
nik gerilim kaynagı yüklerin kompanzasyonunda kullanılması için gerekli kosuldur.
Buna karsın harmonik gerilim kaynakları genellikle düsük empedansa sahiptirler. Ör-
negin elektrolitik DA bag kapasitörlerine sahip diyot dogrultucuların yük empedans-
ları sıga degerlerinin yüksek olmasından kaynaklı |ZY | ≈ 0 olarak ifade edilebilir, bu
sebeple yüksek tepe genlikli ve harmonik bozunumu yüksek akımlar çekerler. Bunun
yanında (2.10)’dan da görülecegi gibi yük empedasının düsmesi PAGF tarafından
üretilen akımın fazladan yük tarafına geçisine sebep olmakta, bu da yükün harmonik
16
akım seviyesini ve PAGF’nin ihtiyaç duyulan anma akım-gerilim degerini arttırmak-
tadır. Tüm bu sebeplerle PAGF’lerin harmonik gerilim kaynaklı yüklerin kompanzas-
yonunda kullanılması zorlasmaktadır. Buna karsın endüstride kullanılan birçok yük,
DA baglarında kullanılan düzlestirici kapasitörler sebebiyle harmonik gerilim kaynagı
formundadırlar. Harmonik gerilim kaynagı yüklerin temel devre seması Sekil 2.7’de
verilmistir. Bu yapıda Sekil 2.4’te görüldügü gibi; hat akımı süreksiz, hat empedan-
sına baglı genlik degisimleri gösteren, yüksek tepe degerlerine ve %60 ∼ %130
aralıgında THB’ye sahiptir. Yük empedanslarının düsüklügünden ötürü bu biçimiyle
PAGF’ler yardımıyla harmonik kompanzasyonunun yapılması zorlasmaktadır.
3-Faz
Şebeke
DA
Kapasitör Evirgeç
Yük
AHS, KGK...
Sekil 2.7. Harmonik Gerilim Kaynagı DA Kapasitörlü Yapı
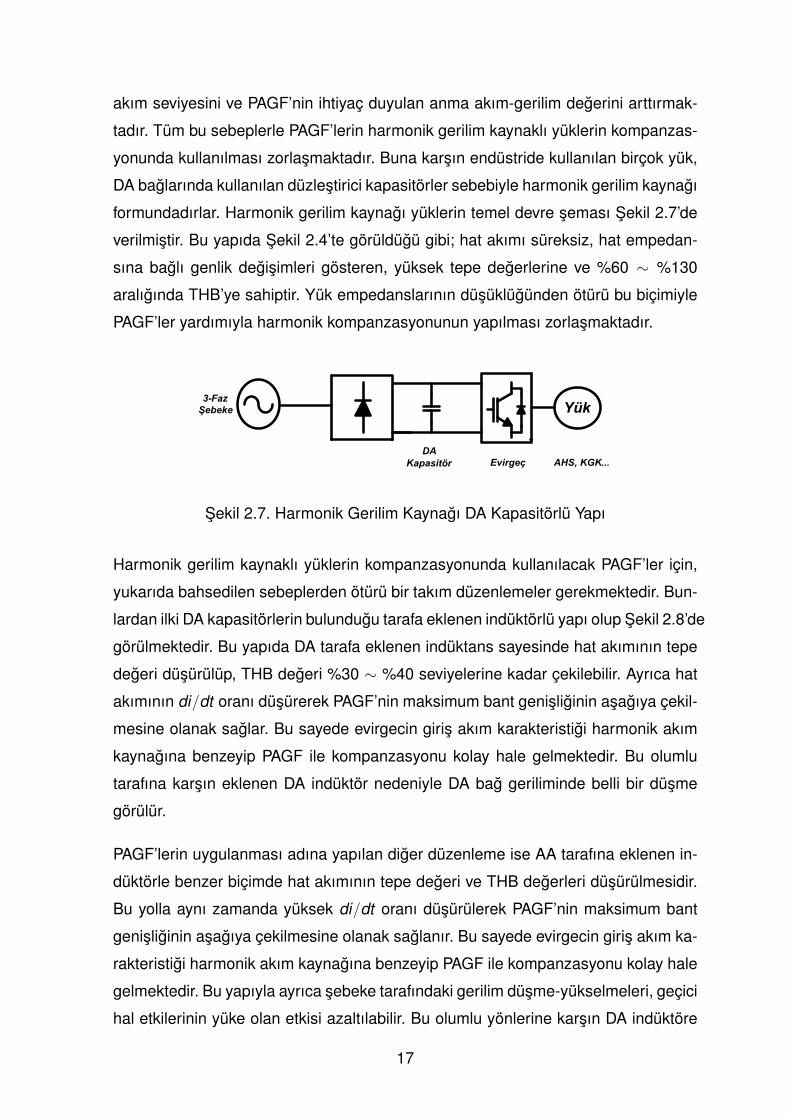
Harmonik gerilim kaynaklı yüklerin kompanzasyonunda kullanılacak PAGF’ler için,
yukarıda bahsedilen sebeplerden ötürü bir takım düzenlemeler gerekmektedir. Bun-
lardan ilki DA kapasitörlerin bulundugu tarafa eklenen indüktörlü yapı olup Sekil 2.8’de
görülmektedir. Bu yapıda DA tarafa eklenen indüktans sayesinde hat akımının tepe
degeri düsürülüp, THB degeri %30 ∼ %40 seviyelerine kadar çekilebilir. Ayrıca hat
akımının di/dt oranı düsürerek PAGF’nin maksimum bant genisliginin asagıya çekil-
mesine olanak saglar. Bu sayede evirgecin giris akım karakteristigi harmonik akım
kaynagına benzeyip PAGF ile kompanzasyonu kolay hale gelmektedir. Bu olumlu
tarafına karsın eklenen DA indüktör nedeniyle DA bag geriliminde belli bir düsme
görülür.
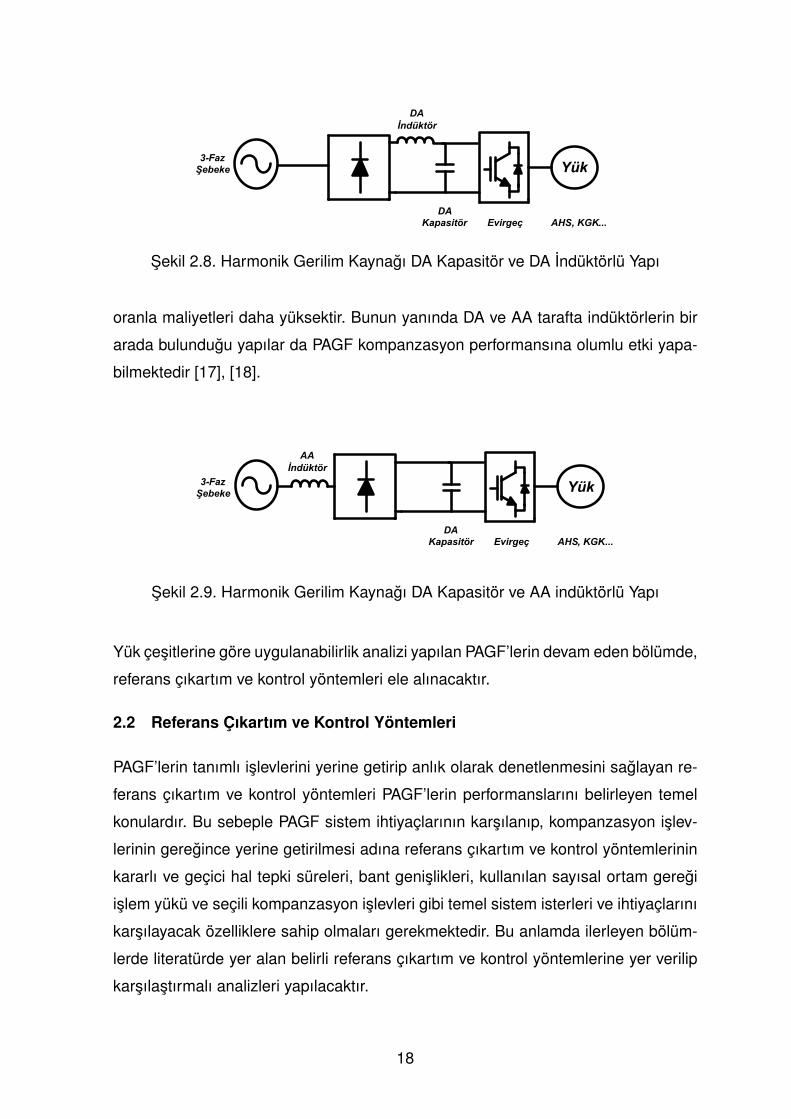
PAGF’lerin uygulanması adına yapılan diger düzenleme ise AA tarafına eklenen in-
düktörle benzer biçimde hat akımının tepe degeri ve THB degerleri düsürülmesidir.
Bu yolla aynı zamanda yüksek di/dt oranı düsürülerek PAGF’nin maksimum bant
genisliginin asagıya çekilmesine olanak saglanır. Bu sayede evirgecin giris akım ka-
rakteristigi harmonik akım kaynagına benzeyip PAGF ile kompanzasyonu kolay hale
gelmektedir. Bu yapıyla ayrıca sebeke tarafındaki gerilim düsme-yükselmeleri, geçici
hal etkilerinin yüke olan etkisi azaltılabilir. Bu olumlu yönlerine karsın DA indüktöre
17
3-Faz
Şebeke
DA
Kapasitör Evirgeç
Yük
AHS, KGK...
DA
İndüktör
Sekil 2.8. Harmonik Gerilim Kaynagı DA Kapasitör ve DA Indüktörlü Yapı
oranla maliyetleri daha yüksektir. Bunun yanında DA ve AA tarafta indüktörlerin bir
arada bulundugu yapılar da PAGF kompanzasyon performansına olumlu etki yapa-
bilmektedir [17], [18].
3-Faz
Şebeke
DA
Kapasitör Evirgeç
Yük
AHS, KGK...
AA
İndüktör
Sekil 2.9. Harmonik Gerilim Kaynagı DA Kapasitör ve AA indüktörlü Yapı
Yük çesitlerine göre uygulanabilirlik analizi yapılan PAGF’lerin devam eden bölümde,
referans çıkartım ve kontrol yöntemleri ele alınacaktır.
2.2 Referans Çıkartım ve Kontrol Yöntemleri
PAGF’lerin tanımlı islevlerini yerine getirip anlık olarak denetlenmesini saglayan re-
ferans çıkartım ve kontrol yöntemleri PAGF’lerin performanslarını belirleyen temel
konulardır. Bu sebeple PAGF sistem ihtiyaçlarının karsılanıp, kompanzasyon islev-
lerinin geregince yerine getirilmesi adına referans çıkartım ve kontrol yöntemlerinin
kararlı ve geçici hal tepki süreleri, bant genislikleri, kullanılan sayısal ortam geregi
islem yükü ve seçili kompanzasyon islevleri gibi temel sistem isterleri ve ihtiyaçlarını
karsılayacak özelliklere sahip olmaları gerekmektedir. Bu anlamda ilerleyen bölüm-
lerde literatürde yer alan belirli referans çıkartım ve kontrol yöntemlerine yer verilip
karsılastırmalı analizleri yapılacaktır.
18
2.2.1 Referans Çıkartım Yöntemleri
PAGF’lerin harmonik eleme, reaktif güç kompanzasyonu ve yük dengeleme gibi is-
levleri yerine getirmesi için gereken ilk asama, çesitli sistem degiskenlerinin (akım-
gerilim) elektriksel ve elektronik arayüzler yardımıyla sayısal ortama aktarılıp ni-
hai olarak güç katına iletilecek olan sinyallerin (referansların) olusturulmasını içerir.
PAGF’ler kullanılan referans çıkartım algoritmasına göre farklı sistem degiskenlerini
kullanabilirler. Bunların arasında, sebeke akımından ya da sebeke geriliminden fay-
dalanarak yapılan çıkartım yöntemleri bulunmasına karsın PAGF’ler için en uygun
yöntem, temel olarak yük akımının içerdigi harmonik bilesenlerin elenmesi amaç-
landıgından, yük akımı kullanılarak referansların elde edilmesidir [10].
Referansların bulunmasında kullanılan bir çok farklı yöntem olmasına karsın, bu
yöntemler genel olarak zaman ve frekans alanındaki yöntemleri içermektedir. Za-
man alanındaki yöntemler belirlenecek harmonik ögelerin ve hesaplama yükünün az
oldugu, geçici hal tepkilerine hızlı cevaplar verilmesi gereken durumlarda öne çıkar-
ken, frekans alanındaki yöntemler genis spektral dagılıma sahip sinyallerin gerçek
zamanlı takibi ve hesabının yapıldıgı durumlarda tercih sebebi olmaktadır.
2.2.1.1 Zaman Alanlı Yöntemler
Zaman alanında uygulanan yöntemlerden baslıcaları Anlık Reaktif Güç Teorisi (ARGT)
ve Senkron Referans Düzlem (SRD) olup birçok PAGF uygulamasında yaygın olarak
kullanılmıslardır.
IYa
IYb
IYc
Va
Vb
Vc
ClarkeDönüşümü
ClarkeDönüşümü
Iα
Iβ
Vα
Vβ
P-QDönüşüm
Pt
Qt
Filtreleme
PAA
QAA
P-Q Ters
Dönüşüm
Iref-α
Iref-β
Iref-a
Iref-b
Iref-c
Ters-ClarkeDönüşümü
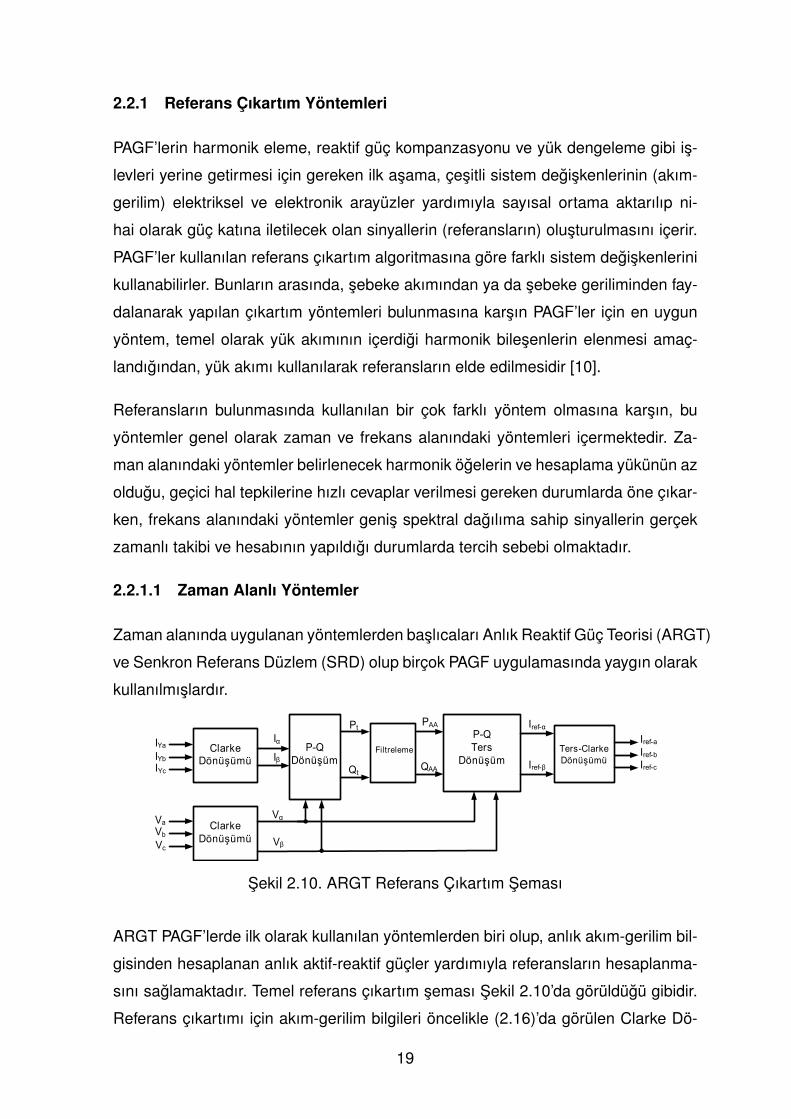
Sekil 2.10. ARGT Referans Çıkartım Seması
ARGT PAGF’lerde ilk olarak kullanılan yöntemlerden biri olup, anlık akım-gerilim bil-
gisinden hesaplanan anlık aktif-reaktif güçler yardımıyla referansların hesaplanma-
sını saglamaktadır. Temel referans çıkartım seması Sekil 2.10’da görüldügü gibidir.
Referans çıkartımı için akım-gerilim bilgileri öncelikle (2.16)’da görülen Clarke Dö-
19

nüsümüne tabi tutulup esdeger, αβ degiskenleri (Iα, Iβ, Vα, Vβ) elde edilip sistemin
toplam aktif (Pt ) ve reaktif (Qt ) gücü (2.17) ve (2.18)’deki gibi hesaplanır. Bu hesap-
lanan degerler DA ve AA bilesenlere sahip olup (2.19)’daki gibi ifade edilebilirler.
xα
xβ
=23
1 −12−1
2
0√
32−√
32
xa
xb
xc
= C
xa
xb
xc
(2.16)
Pt =32(VαIα + VβIβ
)(2.17)
Qt =32(−VβIα + VαIβ
)(2.18)
Pt = PDA + PAA Qt = QDA + QAA (2.19)
Burada PDA bileseni hesaplanan aktif gücün DA bilesenini gösteririken PAA ise aktif
gücün salınım yapan AA bilesenini göstermektedir. Benzer durum QDA ve QAA de-
giskenleri için geçerli olup, PAA ve QAA degiskenleri yük akımının harmoniklerden
kaynaklı aktif ve reaktif bilesenlerine karsılık gelmektedir bu sebeple Pt ve Qt bile-
senleri hesaplandıktan sonra bir yüksek geçirgen filtre yardımıyla, harmoniklere ait
olan PAA ve QAA degiskenleri elde edilir. Daha sonra (PAA−QAA) ve (Vα−Vβ) bilgileri
(2.17) ve (2.18)’de yerine konup çekilerek elde edilen Iref−α ve Iref−β degerleri ters
Clarke Dönüsümü (C−1) ile nihai akım referansları Iref−a, Iref−b ve Iref−c ’yi olusturur.
Bunun yanında ARGT yöntemiyle reaktif güç kompanzasyonu yapılmak istenirse Qt
bileseni filtrelenmeden yani QDA + QAA biçiminde PQ ters dönüsüm bloguna girme-
lidir. Böylece harmonik referansına ek olarak reaktif güç refereansı da olusturulmus
olur [19], [20], [21]. ARGT yönteminin kolay uygulanabilir olması, kararlı durum tep-
kisinin iyi olması ve 3-faz 3-telli sistemlerin yanısıra kimi uyarlanmıs versiyonlarıyla
[20] 3-faz 4-telli sistemlerde de uygulanabilir olmasına karsın, yaygın olarak görülen
gerilim harmonikleri ve dengesizlik durumlarında harmonik referansların ideal olarak
filtrelenemeyisinden ötürü kompanzasyon performansları düsmektedir. Bu sebeple
3-Faz 4-telli PAGF uygulamalarında tercih edilmemektedir. Bunun yanında referans-
lar için kullanılan akım kontrol döngülerinde AA yapıdaki bilesenler kullanılmak du-
rumunda olundugundan yüksek seviyeli kompanzatörlere ve faz düzeltimine ihtiyaç
20
duyulmaktadır, bu sebeple yöntemin kompanzasyon performansı düsmekte, kont-
rol ve uygulama açısından kimi güçlükler ortaya çıkmaktadır. Ayrıca harmoniklerin
seçimli kompanzasyonunun yapılamıyor olması yöntemin baska bir dezavantajını
olusturmaktadır [22].
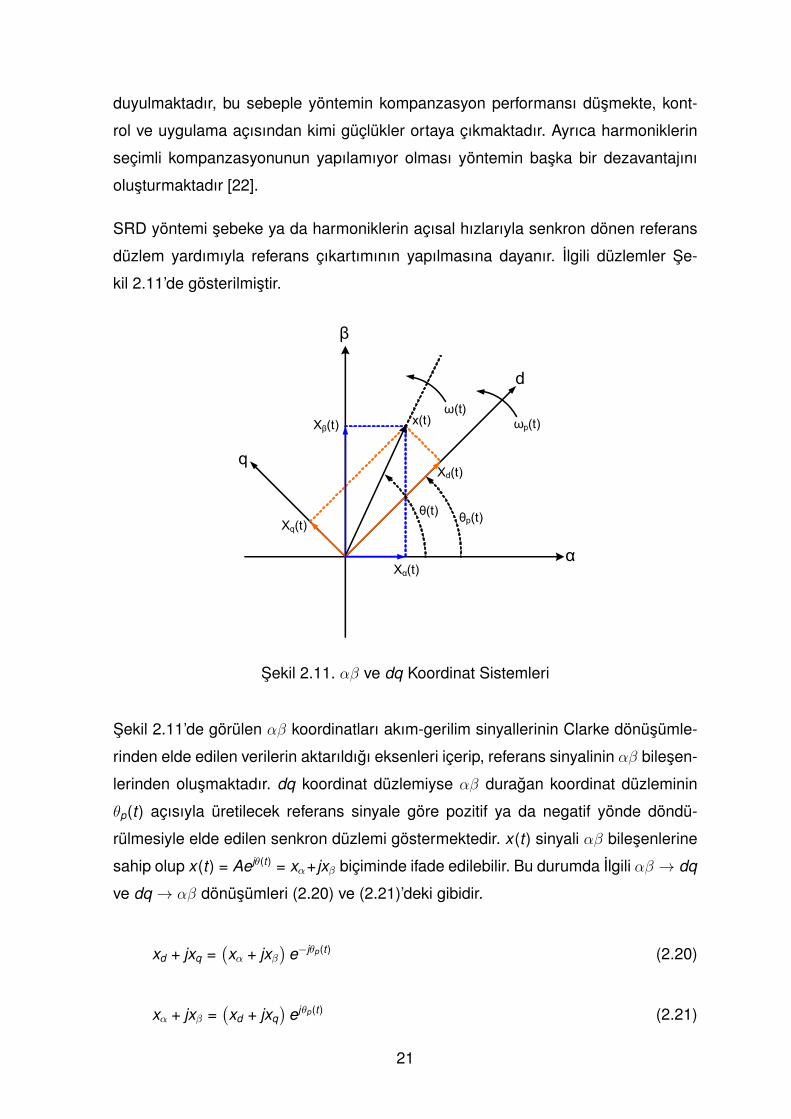
SRD yöntemi sebeke ya da harmoniklerin açısal hızlarıyla senkron dönen referans
düzlem yardımıyla referans çıkartımının yapılmasına dayanır. Ilgili düzlemler Se-
kil 2.11’de gösterilmistir.
q
d
Xq(t)
Xd(t)
Xα(t)
Xβ(t)ω(t)
x(t) ωp(t)
β
α
θ(t) θp(t)
Sekil 2.11. αβ ve dq Koordinat Sistemleri
Sekil 2.11’de görülen αβ koordinatları akım-gerilim sinyallerinin Clarke dönüsümle-
rinden elde edilen verilerin aktarıldıgı eksenleri içerip, referans sinyalinin αβ bilesen-
lerinden olusmaktadır. dq koordinat düzlemiyse αβ duragan koordinat düzleminin
θp(t) açısıyla üretilecek referans sinyale göre pozitif ya da negatif yönde döndü-
rülmesiyle elde edilen senkron düzlemi göstermektedir. x(t) sinyali αβ bilesenlerine
sahip olup x(t) = Aejθ(t) = xα+jxβ biçiminde ifade edilebilir. Bu durumda Ilgili αβ → dq
ve dq → αβ dönüsümleri (2.20) ve (2.21)’deki gibidir.
xd + jxq =(xα + jxβ
)e−jθp(t) (2.20)
xα + jxβ =(xd + jxq
)ejθp(t) (2.21)
21
Esitlik (2.20)’de her iki tarafın gerçel ve sanal kısımları açılıp esitlendiginde (2.22)’deki
Park Dönüsümü olarak bilinen esitlik elde edilir.
xd
xq
=
cos(θp)
sin(θp)
− sin(θp)
cos(θp)xα
xβ
= P
xα
xβ
(2.22)
Bu dönüsümde θp (Sekil 2.11)’deki αβ düzleminin döndürülüs açısına karsılık gel-
mektedir. θp(t) degeri θ(t) esit degisim hızına sahip oldugunda yani dθp/dt = dθ/dt
esitligi saglandıgında (2.20), (2.23)’teki gibi ifade edilebilir.
xd + jxq = Aej(θ−θp) (2.23)
Buradan da görülecegi gibi (2.23)’teki esitligin sag tarafı sabit büyüklükte sayılardan
olusup dq bilsenlerin DA büyüklükler biçiminde ifade edilebilecegini göstermekte-
dir. SRD yönteminin bu özelligi sayesinde düsük dereceli kompanzatörler ile yüksek
performaslı kontrol sistemleri olusturulabilmektedir.
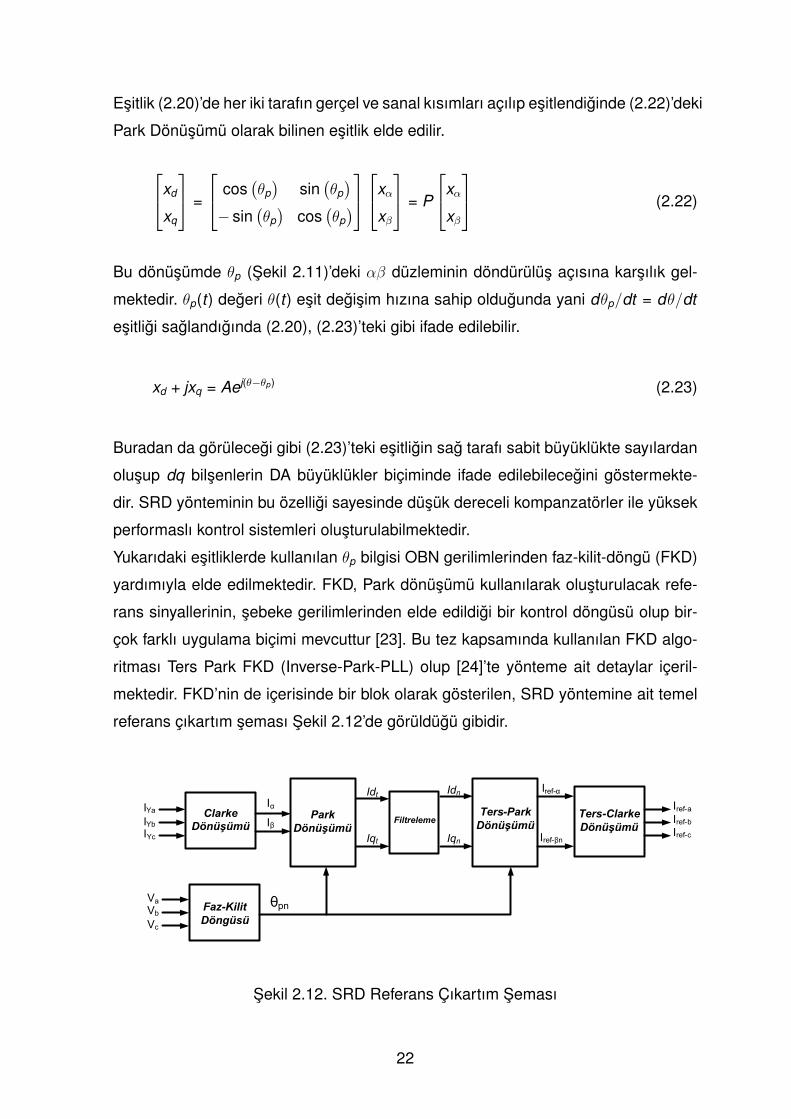
Yukarıdaki esitliklerde kullanılan θp bilgisi OBN gerilimlerinden faz-kilit-döngü (FKD)
yardımıyla elde edilmektedir. FKD, Park dönüsümü kullanılarak olusturulacak refe-
rans sinyallerinin, sebeke gerilimlerinden elde edildigi bir kontrol döngüsü olup bir-
çok farklı uygulama biçimi mevcuttur [23]. Bu tez kapsamında kullanılan FKD algo-
ritması Ters Park FKD (Inverse-Park-PLL) olup [24]’te yönteme ait detaylar içeril-
mektedir. FKD’nin de içerisinde bir blok olarak gösterilen, SRD yöntemine ait temel
referans çıkartım seması Sekil 2.12’de görüldügü gibidir.
IYaIYbIYc
ClarkeDönüşümü
Iα
IβPark
Dönüşümü
VaVbVc
Faz-Kilit
Döngüsü
θpn
Filtreleme
Idt
Iqt
Ters-Park
Dönüşümü
Idn
Iqn
Iref-α
Iref-βn
Ters-Clarke
Dönüşümü
Iref-aIref-bIref-c
Sekil 2.12. SRD Referans Çıkartım Seması
22
Sekil 2.12’deki sema üretilmek istenen referansların içerigine göre farklı biçimlerde
düzenlenerek nihai referans sinyallerinin olusturulmasını saglar. Sebeke frekansına
senkron FKD yardımıyla θp degeri Park Dönüsüm blogunda kullanılıp Idt ve Iqt bile-
senleri elde edilir. Bu sinyaller DA ve AA bilesenlere sahip olup (2.24)’teki gibi ifade
edilebilir.
Idt = IdDA + IdAA Iqt = IqDA + IqAA (2.24)
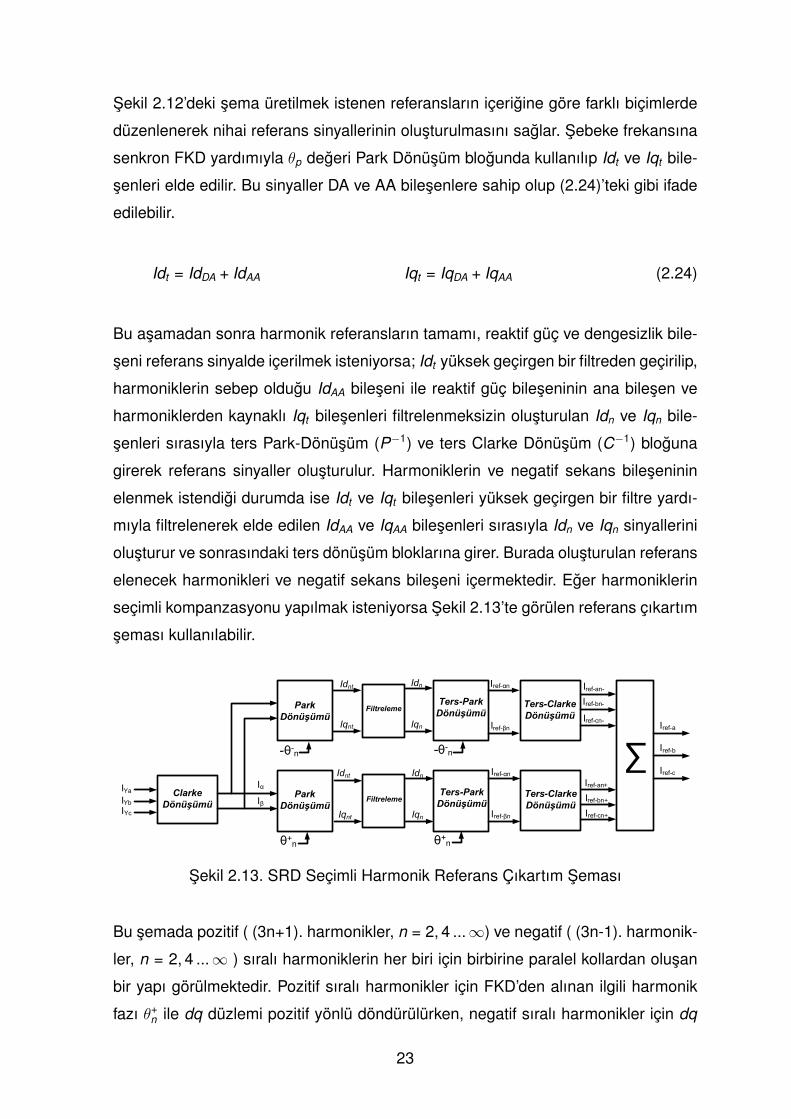
Bu asamadan sonra harmonik referansların tamamı, reaktif güç ve dengesizlik bile-
seni referans sinyalde içerilmek isteniyorsa; Idt yüksek geçirgen bir filtreden geçirilip,
harmoniklerin sebep oldugu IdAA bileseni ile reaktif güç bileseninin ana bilesen ve
harmoniklerden kaynaklı Iqt bilesenleri filtrelenmeksizin olusturulan Idn ve Iqn bile-
senleri sırasıyla ters Park-Dönüsüm (P−1) ve ters Clarke Dönüsüm (C−1) bloguna
girerek referans sinyaller olusturulur. Harmoniklerin ve negatif sekans bileseninin
elenmek istendigi durumda ise Idt ve Iqt bilesenleri yüksek geçirgen bir filtre yardı-
mıyla filtrelenerek elde edilen IdAA ve IqAA bilesenleri sırasıyla Idn ve Iqn sinyallerini
olusturur ve sonrasındaki ters dönüsüm bloklarına girer. Burada olusturulan referans
elenecek harmonikleri ve negatif sekans bileseni içermektedir. Eger harmoniklerin
seçimli kompanzasyonu yapılmak isteniyorsa Sekil 2.13’te görülen referans çıkartım
seması kullanılabilir.
IYaIYbIYc
Clarke
Dönüşümü
Iα
IβPark
DönüşümüFiltreleme
Idnt
Iqnt
Ters-Park
Dönüşümü
Idn
Iqn
Iref-αn
Iref-βn
Ters-Clarke
Dönüşümü
Iref-an+
Iref-bn+
Iref-cn+
θ+n
Park
Dönüşümü
-θ-n
Idnt
Iqnt
Filtreleme
Idn
Iqn
Ters-Park
Dönüşümü
Iref-αn
Iref-βn
Ters-Clarke
Dönüşümü
Iref-an-
Iref-bn-
Iref-cn-
∑Iref-a
Iref-b
Iref-c
θ+n
-θ-n
Sekil 2.13. SRD Seçimli Harmonik Referans Çıkartım Seması
Bu semada pozitif ( (3n+1). harmonikler, n = 2, 4 ...∞) ve negatif ( (3n-1). harmonik-
ler, n = 2, 4 ...∞ ) sıralı harmoniklerin her biri için birbirine paralel kollardan olusan
bir yapı görülmektedir. Pozitif sıralı harmonikler için FKD’den alınan ilgili harmonik
fazı θ+n ile dq düzlemi pozitif yönlü döndürülürken, negatif sıralı harmonikler için dq
23
düzlemi θ−n ile ters yönlü döndürülür. Sonrasında ters dönüsümler yardımıyla elde
edilen sinyaller toplanarak ve kompanzasyonu yapılmak istenen farklı harmonik bi-
lesenler için referans sinyalleri üretilmis olunur.
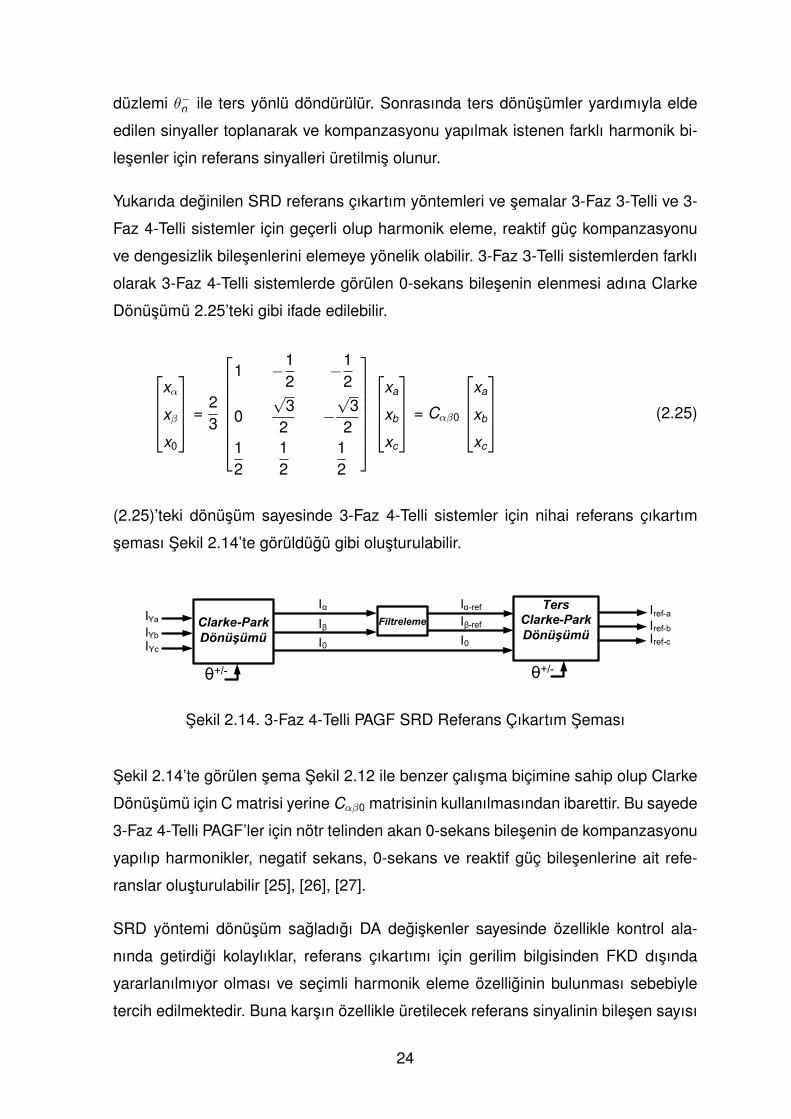
Yukarıda deginilen SRD referans çıkartım yöntemleri ve semalar 3-Faz 3-Telli ve 3-
Faz 4-Telli sistemler için geçerli olup harmonik eleme, reaktif güç kompanzasyonu
ve dengesizlik bilesenlerini elemeye yönelik olabilir. 3-Faz 3-Telli sistemlerden farklı
olarak 3-Faz 4-Telli sistemlerde görülen 0-sekans bilesenin elenmesi adına Clarke
Dönüsümü 2.25’teki gibi ifade edilebilir.
xα
xβ
x0
=23
1 −1
2−1
2
0√
32
−√
32
12
12
12
xa
xb
xc
= Cαβ0
xa
xb
xc
(2.25)
(2.25)’teki dönüsüm sayesinde 3-Faz 4-Telli sistemler için nihai referans çıkartım
seması Sekil 2.14’te görüldügü gibi olusturulabilir.
IYaIYbIYc
Clarke-Park
Dönüşümü
Iα
IβI0
Filtreleme
Ters
Clarke-Park
Dönüşümü
Iref-aIref-bIref-c
θ+/- θ+/-
Iα-refIβ-refI0
Sekil 2.14. 3-Faz 4-Telli PAGF SRD Referans Çıkartım Seması
Sekil 2.14’te görülen sema Sekil 2.12 ile benzer çalısma biçimine sahip olup Clarke
Dönüsümü için C matrisi yerine Cαβ0 matrisinin kullanılmasından ibarettir. Bu sayede
3-Faz 4-Telli PAGF’ler için nötr telinden akan 0-sekans bilesenin de kompanzasyonu
yapılıp harmonikler, negatif sekans, 0-sekans ve reaktif güç bilesenlerine ait refe-
ranslar olusturulabilir [25], [26], [27].
SRD yöntemi dönüsüm sagladıgı DA degiskenler sayesinde özellikle kontrol ala-
nında getirdigi kolaylıklar, referans çıkartımı için gerilim bilgisinden FKD dısında
yararlanılmıyor olması ve seçimli harmonik eleme özelliginin bulunması sebebiyle
tercih edilmektedir. Buna karsın özellikle üretilecek referans sinyalinin bilesen sayısı
24
arttıgında getirdigi hesaplama yükü artıp paralel islemi gerekli kıldıgından DSP uy-
gulaması pratikte zorlasmaktadır. Içerdigi filtre blokları yüzünden faz gecikmelerine
sebebiyet verip her referans bilesen için ayrı faz-kompanzasyonunu gerekli kılmak-
tadır. Bunlara ek olarak sebeke gerilim bozunumu ve dengesizliginden kaynaklı FKD
sebebiyle kompanzasyon performansları düsebilmektedir [22], [28].
2.2.1.2 Frekans Alanlı Yöntemler
Frekans alanında uygulanan yöntemler ise temel olarak Fourier analizine dayanıp,
bu yöntemin kimi sadelestirme ve uyarlamalar ile gerçek zamanlı sistemlere uygula-
nabilir hale getirilidigi algoritmaları kapsamaktadır. Bunlardan ilki Kesikli Fourier Dö-
nüsümü (DFT) olarak bilinen yöntemdir. Bu yöntemle zaman ekseninde bir periyo-
dundan N tane örnek alınarak örneklenmis x [n] sinyalinin DFT dönüsümü (2.26)’daki
gibidir.
X [k ] =N−1∑n=0
x [n] e−j2πkn/N =N−1∑n=0
x [n] W−knN k = 0, 1, 2 ... N − 1 (2.26)
Burada X [k ] DFT sonrasında elde edilen kompleks frekans bilesenini gösterip, (2.27)’deki
gibi ifade edilebilir.
X [k ] = Xr [k ] + jXi [k ] (2.27)
Kompleks bir sayı olarak ifade edilen X [k ]’nın reel kısmı Xr [k ] ve sanal kısmı Xi [k ]
biçiminde ifade edilmektedir. X [k ] (2.28) ve (2.29)’da görüldügü gibi karsılık geldigi
frekans bileseninin genlik ve faz bilgisini içermektedir.
|X [k ]| =√
Xr [k ]2 + Xi [k ]2 (2.28)
Φ[k ] = tan−1(
Xi [k ]Xr [k ]
)(2.29)
Bu sekilde k indeksine baglı olarak frekans alanında genlik ve faz bilgileri edinilen
harmonik bilesenlerden referans sinyalde içerilmek istenenleri, (2.30)’daki ters dö-
nüsüme tabi tutularak zaman alanında referans bilesenler olusturulur.
x [n] =1N
N−1∑k=0
X [k ] e j2πkn/N =1N
N−1∑k=0
x [n] W knN n = 0, 1, 2 ... N − 1 (2.30)
25
Bu yöntemle referans olusturmak için (2.26) ve (2.30)’da görüldügü gibi tek bir fre-
kans bileseni için DFT islemi N kadar kompleks çarpma islemine ve (N−1) kompleks
toplama islemine ihtiyaç vardır. Bu tüm bir spektruma genisletilirse ihtiyaç duyulan
kompleks çarpma sayısı N2 ve toplama sayısı da N(N − 1) olmaktadır. Özellikle
örnekleme frekansının artttıgı durumlarda ana bilesen frekans çözünürlügüne ulas-
mak için N sayısı artmakta ve islem yogunlugu karesel olarak artıs göstermektedir.
Bu sebeple DFT yöntemi DSP tabanlı gerçek zamanlı uygulamalarda bu haliyle kul-
lanılamamaktadır.
DFT yönteminin islem yükü sebebiyle getirdigi dezavantajın ortadan kaldırılması
adına bir çok farklı algoritma gelistirilmistir. Bunlardan en bilineni Hızlı Fourier Dö-
nüsümü (FFT) yöntemidir [31]. Bu yöntemde (2.26)’da yer alan W knN her bir döngüde
tekrardan hesaplanmasını gerekli kılmayacak periyodiklik ve simetri özelliklerine sa-
hiptir. Bu özellikler (2.31) ve (2.32)’de verilmistir.
W k+NN = W k
N (2.31)
W k+ N2
N = −W kN (2.32)
Bu özelliklerin yanında FFT algoritmasında büyük islemlerin küçük parçalar halinde
basitlestirilmesini saglayan ondalıklama (decimation) yöntemleriyle hesaplama çar-
pım ve toplamdan ibaret islem bloklarına indirgenebilir. Bu yöntemlerden en bilineni
2-tabanlı (radix-2) zaman alanında ondalıklama olup 8 örnekli bir sinyal için uygula-
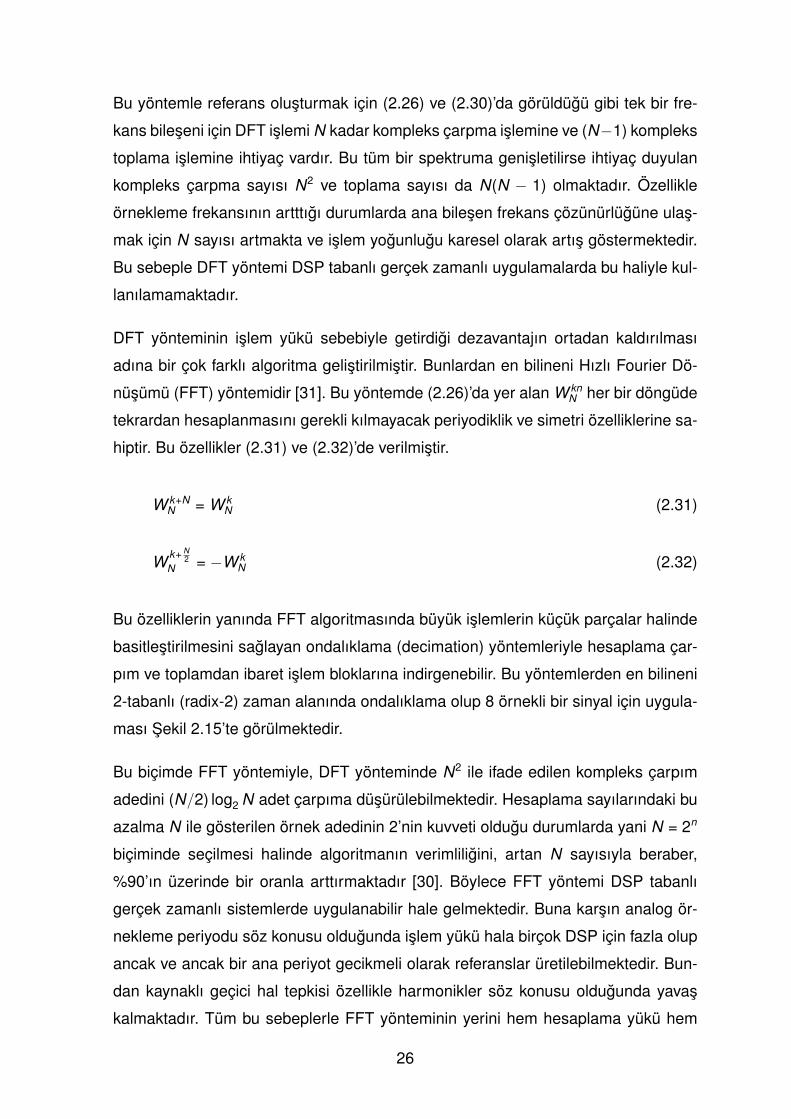
ması Sekil 2.15’te görülmektedir.
Bu biçimde FFT yöntemiyle, DFT yönteminde N2 ile ifade edilen kompleks çarpım
adedini (N/2) log2 N adet çarpıma düsürülebilmektedir. Hesaplama sayılarındaki bu
azalma N ile gösterilen örnek adedinin 2’nin kuvveti oldugu durumlarda yani N = 2n
biçiminde seçilmesi halinde algoritmanın verimliligini, artan N sayısıyla beraber,
%90’ın üzerinde bir oranla arttırmaktadır [30]. Böylece FFT yöntemi DSP tabanlı
gerçek zamanlı sistemlerde uygulanabilir hale gelmektedir. Buna karsın analog ör-
nekleme periyodu söz konusu oldugunda islem yükü hala birçok DSP için fazla olup
ancak ve ancak bir ana periyot gecikmeli olarak referanslar üretilebilmektedir. Bun-
dan kaynaklı geçici hal tepkisi özellikle harmonikler söz konusu oldugunda yavas
kalmaktadır. Tüm bu sebeplerle FFT yönteminin yerini hem hesaplama yükü hem
26
W80
W80
W80
W80
–1
–1
–1
–1
–1
–1
–1
–1
–1
–1
–1
–1
W80
W82
W80
W82
W80
W81
W82
W83
x(0)
x(4)
x(2)
x(6)
x(1)
x(5)
x(3)
x(7)
X(0)
X(1)
X(2)
X(3)
X(4)
X(5)
X(6)
X(7)
Sekil 2.15. 8-Noktalı Zaman Alanında Ondalıklama ile FFT
de geçici hal tepkisi açısından tercih sebebi olabilcek yöntemler almaktadır [22],
[28]. Bu yöntemlerin basında temel olarak DFT yöntemine dayalı bir algoritma olan
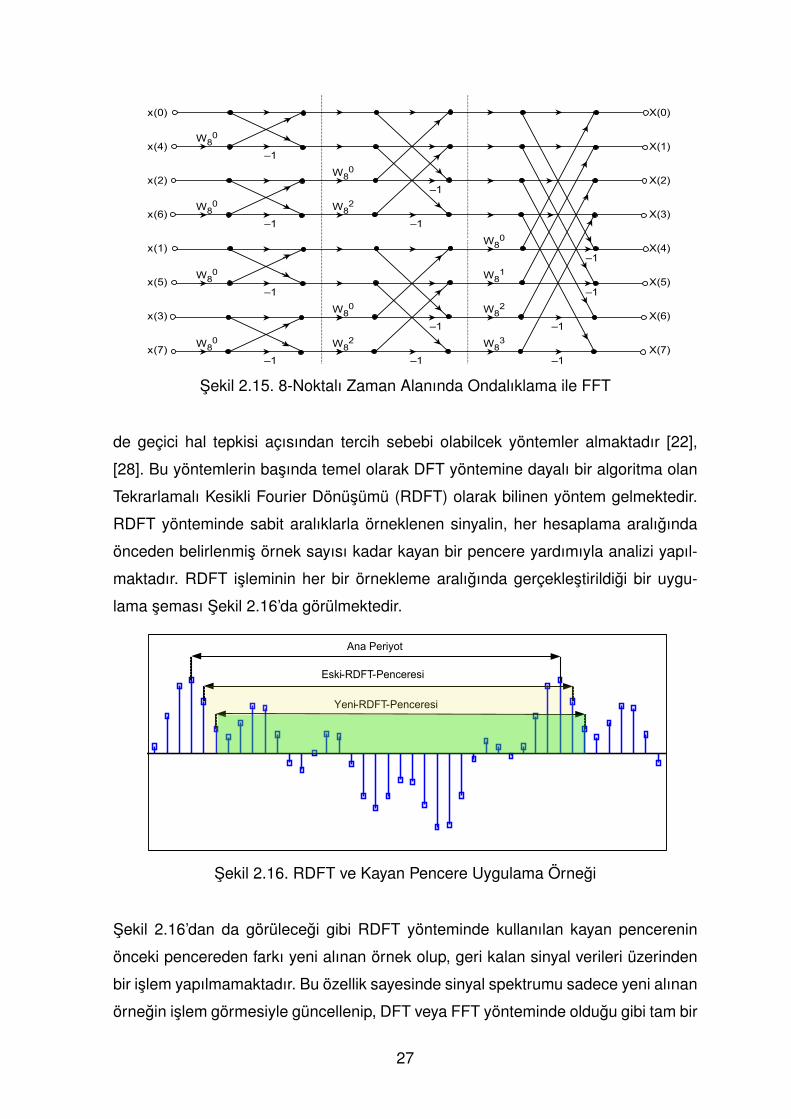
Tekrarlamalı Kesikli Fourier Dönüsümü (RDFT) olarak bilinen yöntem gelmektedir.
RDFT yönteminde sabit aralıklarla örneklenen sinyalin, her hesaplama aralıgında
önceden belirlenmis örnek sayısı kadar kayan bir pencere yardımıyla analizi yapıl-
maktadır. RDFT isleminin her bir örnekleme aralıgında gerçeklestirildigi bir uygu-
lama seması Sekil 2.16’da görülmektedir.
Eski-RDFT-Penceresi
Ana Periyot
Yeni-RDFT-Penceresi
Sekil 2.16. RDFT ve Kayan Pencere Uygulama Örnegi
Sekil 2.16’dan da görülecegi gibi RDFT yönteminde kullanılan kayan pencerenin
önceki pencereden farkı yeni alınan örnek olup, geri kalan sinyal verileri üzerinden
bir islem yapılmamaktadır. Bu özellik sayesinde sinyal spektrumu sadece yeni alınan
örnegin islem görmesiyle güncellenip, DFT veya FFT yönteminde oldugu gibi tam bir
27

veri setine olan ihtiyaç ortadan kalkmaktadır.
Alınan her yeni örnek ile güncellenecek olan frekans spektrum verileri RDFT yönte-
miyle (2.33)’teki gibi elde edilebilir.
X (k , m + 1) =N−1∑n=0
xm+1[n] W knN =
N−1∑n=0
xm[n] W knN
=N−1∑n=0
xm[n + 1] W k (n+1)N W−k
Nn+1→n=
N∑n=1
xm[n] W knN W−k
N
=
(N−1∑n=0
xm[n] W knN + x [N]− x [0]
)W−k
N
= (X (k , m) + x [N]− x [0]) W−kN = (X (k , m) + xe) W−k
N (2.33)
(2.33)’teki X (k , m + 1) yeni alınan örnek ile olusturulan ilgili frekansın spektrum çıktı-
sını gösterirken X (k , m) verisi önceki hesaplamadan elde edilmis olan degeri göster-
mektedir. Bunun yanında xe bir ana periyot önce alınan deger ile yeni alınan örnegin
genlik farkını göstermektedir. Buradan da anlasılacagı gibi eger son örnek ile bir pe-
riyot öncesinde alınan örnek birbirine esitse frekans spektrumunda beklenecegi gibi
bir degisiklik olmayacak, aksi durumda ise spektrum xe degerinin katkısıyla yenile-
necektir. Bu sayede istenen frekans bileseninin genlik ve faz bilgileri her örnekleme
aralıgında elde edilip, DFT veya FFT yönteminin aksine harmonik referanslar anlık
olarak üretilmis olacaktır. RDFT yöntemimin giris-çıkıs karakteristigi (2.33)’te verilen
esitlikler kullanılarak z-dönüsümü yardımıyla (2.34)’teki gibi elde edilebilir.
H(z) =X (z)x(z)
=(1− z−N) W−k
N
1−W−kN z−1
(2.34)
(2.34)’te N pencere uzunulugunu k ise harmonik sırasını göstermektedir. Bu transfer
karakteristigi dikkate alınarak N=400 örnek uzunlugundaki kayan pencere ile 5. har-
monik bilesenin (k=5) genlik ve faz bilgisinin elde edilecegi RDFT hesaplamasının
frekans tepkisi Sekil 2.17’de görülmektedir.
28
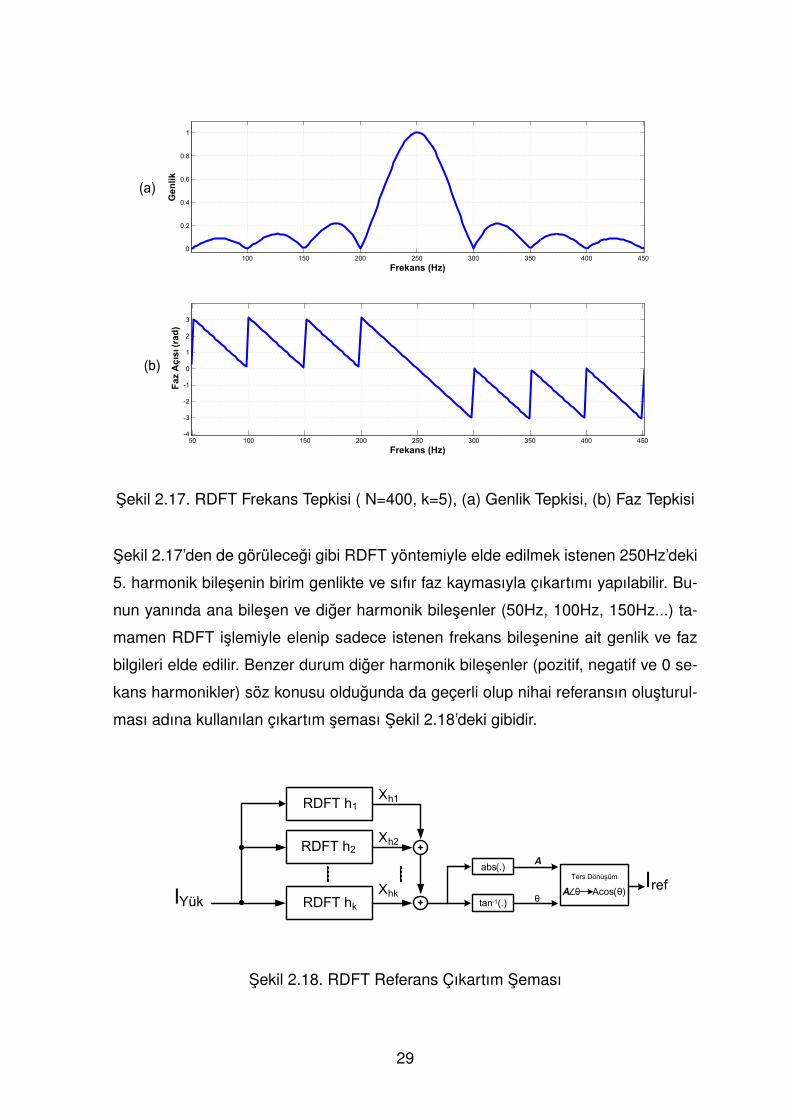
100 150 200 250 300 350 400 450
0
0.2
0.4
0.6
0.8
1
Frekans (Hz)
Ge
nlik
50 100 150 200 250 300 350 400 450-4
-3
-2
-1
0
1
2
3
Frekans (Hz)
Fa
z A
çısı
(a)
(b)
(rad
)
Sekil 2.17. RDFT Frekans Tepkisi ( N=400, k=5), (a) Genlik Tepkisi, (b) Faz Tepkisi
Sekil 2.17’den de görülecegi gibi RDFT yöntemiyle elde edilmek istenen 250Hz’deki
5. harmonik bilesenin birim genlikte ve sıfır faz kaymasıyla çıkartımı yapılabilir. Bu-
nun yanında ana bilesen ve diger harmonik bilesenler (50Hz, 100Hz, 150Hz...) ta-
mamen RDFT islemiyle elenip sadece istenen frekans bilesenine ait genlik ve faz
bilgileri elde edilir. Benzer durum diger harmonik bilesenler (pozitif, negatif ve 0 se-
kans harmonikler) söz konusu oldugunda da geçerli olup nihai referansın olusturul-
ması adına kullanılan çıkartım seması Sekil 2.18’deki gibidir.
IYük RDFT hk
RDFT h1
RDFT h2
Xh1
Xh2
Xhktan-1(.)
abs(.)Ters Dönüşüm Iref
A
A θθ
Acos(θ)
Sekil 2.18. RDFT Referans Çıkartım Seması
29
Sekil 2.18’den de görülecegi gibi her harmonik bilesen için paralel kollardan olu-
san RDFT bloklarından çıkan Xh bir kompleks sayıyı ifade etmektedir. Ilgili harmonik
bilesenin genlik ve faz bilgilerine karsılık gelen bu ifadeler direkt olarak toplanıp za-
man alanında referans sinyalini olusturmak için gerekli olan toplam genlik ve faz
bilgileri elde edilir. Zaman alanına geçis için kullanılan mutlak deger ve ters tanjant
islemlerinin her bilesen için ayrı ayrı yapılmak yerine tek bir toplama isleminin ar-
dından yapılması özellikle DSP’ler için agır bir islem yükü olusturan kareköklü ve
ters-trigonometrik islemlerin her çevrim içinde harmonik bilesen sayısı kadar degil
yalnızca bir sefer yapılmasını olanaklı kılar. Bu RDFT yönteminin gerçek zamanlı
uygulamayı kolaylastıran önemli özelliklerinden biridir. Son asamada genlik ve faz
bilgileri elde edilen referans sinyalin zaman alanındaki nihai karsılıgı ters dönüsüm
bloguyla ifade edilen islem sonrası elde edilir.
RDFT yöntemiyle alınan her örnek sonrasında yenilenen sinyal spektrumu frekans
alanındaki diger yöntemlere göre geçici hal tepkisini iyilestirip zamanla degisen sin-
yallerin takibinde daha kısa sürede daha yumusak geçisler saglar. Böylece zaman
alanındaki yöntemlerin geçici hal tepkilerine yakın bir performans elde edilmis olu-
nur. Yöntemde fazladan kullanılan bir filtre blogunun olmayısı ve çıkartımı yapılacak
olan frekans çevresindeki faz tepkisinin dogrusal olusu kontrol sisteminden kaynaklı
gecikmeler sebebiyle yapılacak faz kompanzasyonunu kolaylastırmaktadır. Yapıla-
cak islem sayısı ve fazladan çevrim zamanı tüketecek olan kompleks islemlerin az-
lıgının yanı sıra sadece hedeflenen harmoniklerin çıkartımı yapılıyor oldugundan
yüksek örnekleme hızlarında spektral-sızıntı (spectral-leakage) problemi görülme-
mektedir. Buna karsın (2.34)’te görülen transfer karakterisitiginin düsük örnekleme
hızlarında ve çözünürlügünde kararlılıgını kaybetme riski bulunmaktadır. Bu prob-
lem örnekleme hızının ve çözünürlügünün yüksek oldugu ondalıklı islem yapabilen
DSP’ler kulanılarak ortadan kaldırılabilir [32], [33], [34].
RDFT yöntemi zaman ve frekans alanındaki yöntemler söz konusu oldugunda sahip
oldugu bir çok avantajdan ötürü, tezin geri kalan kısmında temel harmonik refe-
rans çıkartım yöntemi olarak kullanılacaktır. Referans çıkartım yöntemlerine degini-
len PAGF’nin ilerleyen alt bölümde PAGF’lerin kontrol yöntemlerine iliskin detaylar
aktarılacaktır.
30
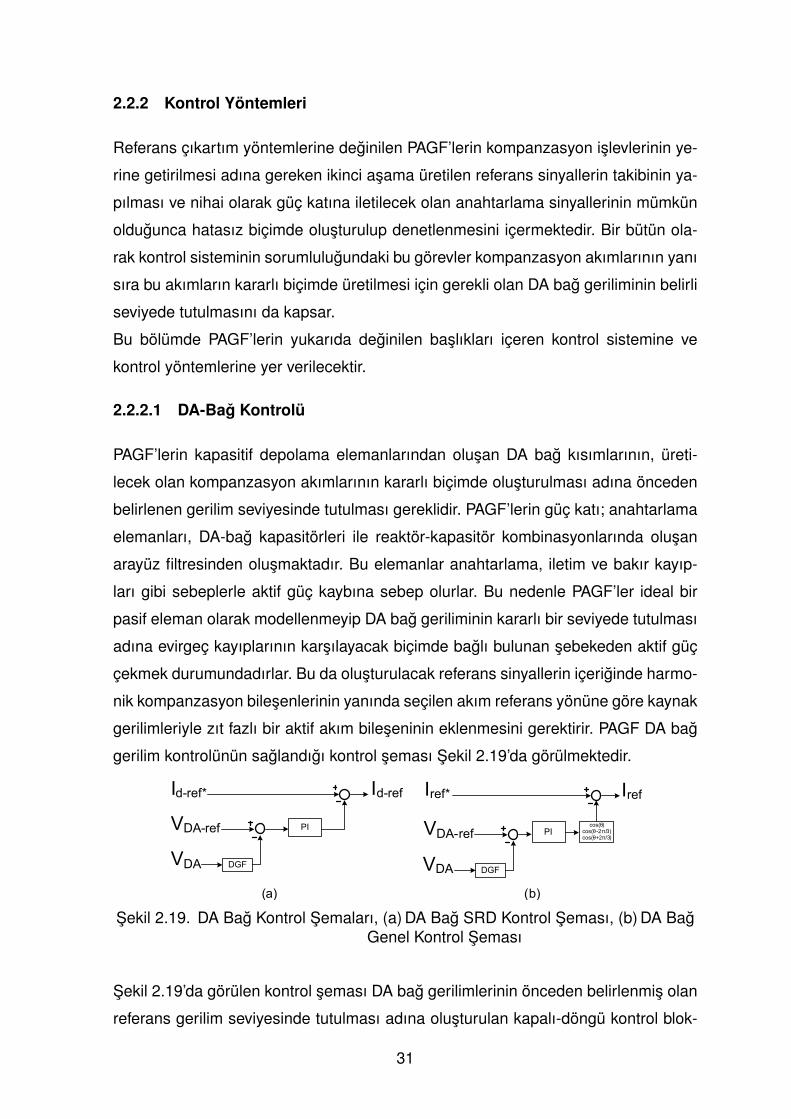
2.2.2 Kontrol Yöntemleri
Referans çıkartım yöntemlerine deginilen PAGF’lerin kompanzasyon islevlerinin ye-
rine getirilmesi adına gereken ikinci asama üretilen referans sinyallerin takibinin ya-
pılması ve nihai olarak güç katına iletilecek olan anahtarlama sinyallerinin mümkün
oldugunca hatasız biçimde olusturulup denetlenmesini içermektedir. Bir bütün ola-
rak kontrol sisteminin sorumlulugundaki bu görevler kompanzasyon akımlarının yanı
sıra bu akımların kararlı biçimde üretilmesi için gerekli olan DA bag geriliminin belirli
seviyede tutulmasını da kapsar.
Bu bölümde PAGF’lerin yukarıda deginilen baslıkları içeren kontrol sistemine ve
kontrol yöntemlerine yer verilecektir.
2.2.2.1 DA-Bag Kontrolü
PAGF’lerin kapasitif depolama elemanlarından olusan DA bag kısımlarının, üreti-
lecek olan kompanzasyon akımlarının kararlı biçimde olusturulması adına önceden
belirlenen gerilim seviyesinde tutulması gereklidir. PAGF’lerin güç katı; anahtarlama
elemanları, DA-bag kapasitörleri ile reaktör-kapasitör kombinasyonlarında olusan
arayüz filtresinden olusmaktadır. Bu elemanlar anahtarlama, iletim ve bakır kayıp-
ları gibi sebeplerle aktif güç kaybına sebep olurlar. Bu nedenle PAGF’ler ideal bir
pasif eleman olarak modellenmeyip DA bag geriliminin kararlı bir seviyede tutulması
adına evirgeç kayıplarının karsılayacak biçimde baglı bulunan sebekeden aktif güç
çekmek durumundadırlar. Bu da olusturulacak referans sinyallerin içeriginde harmo-
nik kompanzasyon bilesenlerinin yanında seçilen akım referans yönüne göre kaynak
gerilimleriyle zıt fazlı bir aktif akım bileseninin eklenmesini gerektirir. PAGF DA bag
gerilim kontrolünün saglandıgı kontrol seması Sekil 2.19’da görülmektedir.
VDA
VDA-ref
DGF
PI
Id-ref* Id-ref
(a)
VDA
VDA-ref
DGF
PI
Iref*
cos(θ)cos(θ-2π/3)cos(θ+2π/3)
Iref
(b)
Sekil 2.19. DA Bag Kontrol Semaları, (a) DA Bag SRD Kontrol Seması, (b) DA BagGenel Kontrol Seması
Sekil 2.19’da görülen kontrol seması DA bag gerilimlerinin önceden belirlenmis olan
referans gerilim seviyesinde tutulması adına olusturulan kapalı-döngü kontrol blok-
31
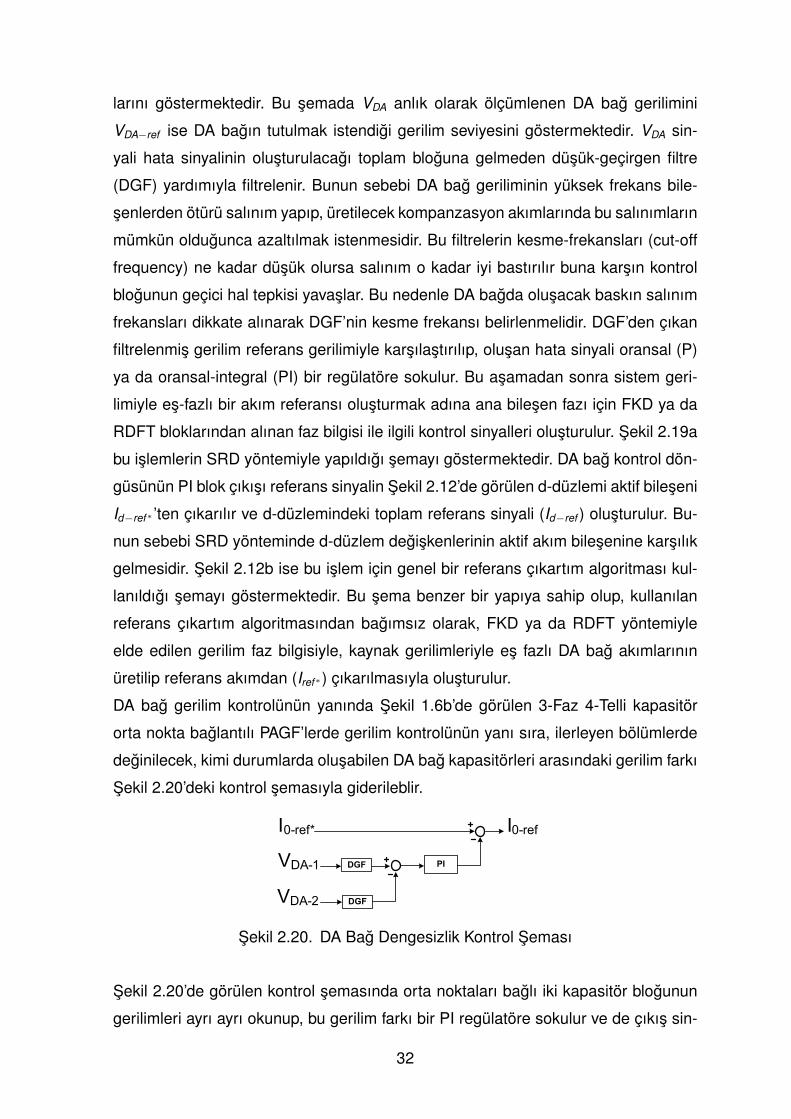
larını göstermektedir. Bu semada VDA anlık olarak ölçümlenen DA bag gerilimini
VDA−ref ise DA bagın tutulmak istendigi gerilim seviyesini göstermektedir. VDA sin-
yali hata sinyalinin olusturulacagı toplam bloguna gelmeden düsük-geçirgen filtre
(DGF) yardımıyla filtrelenir. Bunun sebebi DA bag geriliminin yüksek frekans bile-
senlerden ötürü salınım yapıp, üretilecek kompanzasyon akımlarında bu salınımların
mümkün oldugunca azaltılmak istenmesidir. Bu filtrelerin kesme-frekansları (cut-off
frequency) ne kadar düsük olursa salınım o kadar iyi bastırılır buna karsın kontrol
blogunun geçici hal tepkisi yavaslar. Bu nedenle DA bagda olusacak baskın salınım
frekansları dikkate alınarak DGF’nin kesme frekansı belirlenmelidir. DGF’den çıkan
filtrelenmis gerilim referans gerilimiyle karsılastırılıp, olusan hata sinyali oransal (P)
ya da oransal-integral (PI) bir regülatöre sokulur. Bu asamadan sonra sistem geri-
limiyle es-fazlı bir akım referansı olusturmak adına ana bilesen fazı için FKD ya da
RDFT bloklarından alınan faz bilgisi ile ilgili kontrol sinyalleri olusturulur. Sekil 2.19a
bu islemlerin SRD yöntemiyle yapıldıgı semayı göstermektedir. DA bag kontrol dön-
güsünün PI blok çıkısı referans sinyalin Sekil 2.12’de görülen d-düzlemi aktif bileseni
Id−ref∗ ’ten çıkarılır ve d-düzlemindeki toplam referans sinyali (Id−ref ) olusturulur. Bu-
nun sebebi SRD yönteminde d-düzlem degiskenlerinin aktif akım bilesenine karsılık
gelmesidir. Sekil 2.12b ise bu islem için genel bir referans çıkartım algoritması kul-
lanıldıgı semayı göstermektedir. Bu sema benzer bir yapıya sahip olup, kullanılan
referans çıkartım algoritmasından bagımsız olarak, FKD ya da RDFT yöntemiyle
elde edilen gerilim faz bilgisiyle, kaynak gerilimleriyle es fazlı DA bag akımlarının
üretilip referans akımdan (Iref∗) çıkarılmasıyla olusturulur.
DA bag gerilim kontrolünün yanında Sekil 1.6b’de görülen 3-Faz 4-Telli kapasitör
orta nokta baglantılı PAGF’lerde gerilim kontrolünün yanı sıra, ilerleyen bölümlerde
deginilecek, kimi durumlarda olusabilen DA bag kapasitörleri arasındaki gerilim farkı
Sekil 2.20’deki kontrol semasıyla giderileblir.
VDA-2
VDA-1
DGF
PI
I0-ref* I0-ref
DGF
Sekil 2.20. DA Bag Dengesizlik Kontrol Seması
Sekil 2.20’de görülen kontrol semasında orta noktaları baglı iki kapasitör blogunun
gerilimleri ayrı ayrı okunup, bu gerilim farkı bir PI regülatöre sokulur ve de çıkıs sin-
32
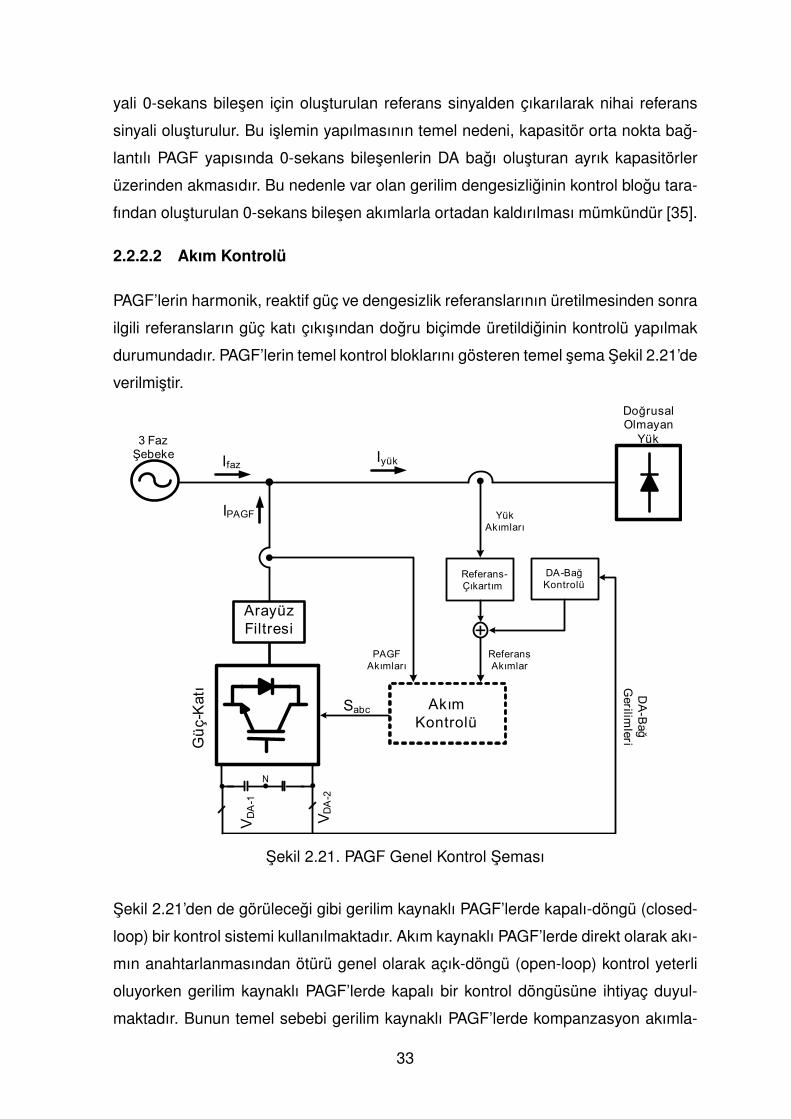
yali 0-sekans bilesen için olusturulan referans sinyalden çıkarılarak nihai referans
sinyali olusturulur. Bu islemin yapılmasının temel nedeni, kapasitör orta nokta bag-
lantılı PAGF yapısında 0-sekans bilesenlerin DA bagı olusturan ayrık kapasitörler
üzerinden akmasıdır. Bu nedenle var olan gerilim dengesizliginin kontrol blogu tara-
fından olusturulan 0-sekans bilesen akımlarla ortadan kaldırılması mümkündür [35].
2.2.2.2 Akım Kontrolü
PAGF’lerin harmonik, reaktif güç ve dengesizlik referanslarının üretilmesinden sonra
ilgili referansların güç katı çıkısından dogru biçimde üretildiginin kontrolü yapılmak
durumundadır. PAGF’lerin temel kontrol bloklarını gösteren temel sema Sekil 2.21’de
verilmistir.
ğDo rusalOlmayanYük3 Faz
Şebeke
ArayüzFiltresi
YükAkımları
Iyük
IPAGF
Ifaz
Güç-Katı
VDA-1
VDA-2
PAGFAkımları
Referans-Çıkartım
ReferansAkımlar
DA-Bağ
Gerilim
leri
AkımKontrolü
DA-BağKontrolü
+
Sabc
N
Sekil 2.21. PAGF Genel Kontrol Seması
Sekil 2.21’den de görülecegi gibi gerilim kaynaklı PAGF’lerde kapalı-döngü (closed-
loop) bir kontrol sistemi kullanılmaktadır. Akım kaynaklı PAGF’lerde direkt olarak akı-
mın anahtarlanmasından ötürü genel olarak açık-döngü (open-loop) kontrol yeterli
oluyorken gerilim kaynaklı PAGF’lerde kapalı bir kontrol döngüsüne ihtiyaç duyul-
maktadır. Bunun temel sebebi gerilim kaynaklı PAGF’lerde kompanzasyon akımla-
33
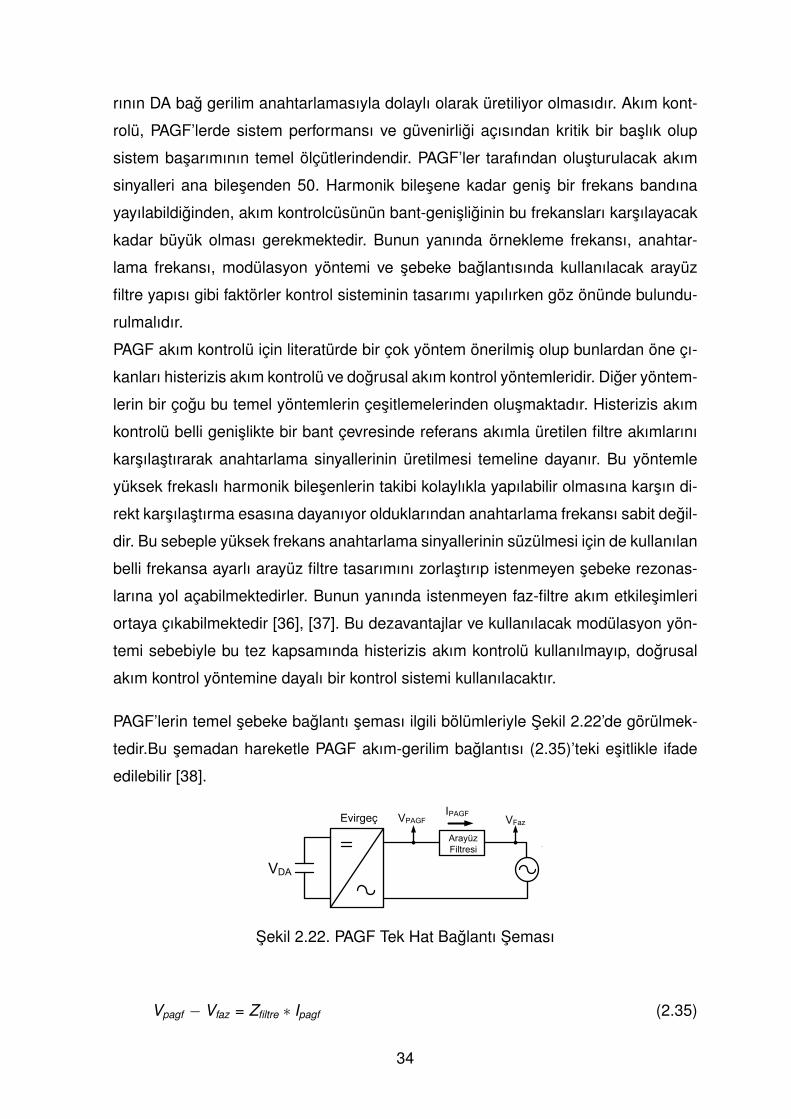
rının DA bag gerilim anahtarlamasıyla dolaylı olarak üretiliyor olmasıdır. Akım kont-
rolü, PAGF’lerde sistem performansı ve güvenirligi açısından kritik bir baslık olup
sistem basarımının temel ölçütlerindendir. PAGF’ler tarafından olusturulacak akım
sinyalleri ana bilesenden 50. Harmonik bilesene kadar genis bir frekans bandına
yayılabildiginden, akım kontrolcüsünün bant-genisliginin bu frekansları karsılayacak
kadar büyük olması gerekmektedir. Bunun yanında örnekleme frekansı, anahtar-
lama frekansı, modülasyon yöntemi ve sebeke baglantısında kullanılacak arayüz
filtre yapısı gibi faktörler kontrol sisteminin tasarımı yapılırken göz önünde bulundu-
rulmalıdır.
PAGF akım kontrolü için literatürde bir çok yöntem önerilmis olup bunlardan öne çı-
kanları histerizis akım kontrolü ve dogrusal akım kontrol yöntemleridir. Diger yöntem-
lerin bir çogu bu temel yöntemlerin çesitlemelerinden olusmaktadır. Histerizis akım
kontrolü belli genislikte bir bant çevresinde referans akımla üretilen filtre akımlarını
karsılastırarak anahtarlama sinyallerinin üretilmesi temeline dayanır. Bu yöntemle
yüksek frekaslı harmonik bilesenlerin takibi kolaylıkla yapılabilir olmasına karsın di-
rekt karsılastırma esasına dayanıyor olduklarından anahtarlama frekansı sabit degil-
dir. Bu sebeple yüksek frekans anahtarlama sinyallerinin süzülmesi için de kullanılan
belli frekansa ayarlı arayüz filtre tasarımını zorlastırıp istenmeyen sebeke rezonas-
larına yol açabilmektedirler. Bunun yanında istenmeyen faz-filtre akım etkilesimleri
ortaya çıkabilmektedir [36], [37]. Bu dezavantajlar ve kullanılacak modülasyon yön-
temi sebebiyle bu tez kapsamında histerizis akım kontrolü kullanılmayıp, dogrusal
akım kontrol yöntemine dayalı bir kontrol sistemi kullanılacaktır.
PAGF’lerin temel sebeke baglantı seması ilgili bölümleriyle Sekil 2.22’de görülmek-
tedir.Bu semadan hareketle PAGF akım-gerilim baglantısı (2.35)’teki esitlikle ifade
edilebilir [38].
VDA
ArayüzFiltresi
Evirgeç VPAGF VFazIPAGF
Sekil 2.22. PAGF Tek Hat Baglantı Seması
Vpagf − Vfaz = Zfiltre ∗ Ipagf (2.35)
34
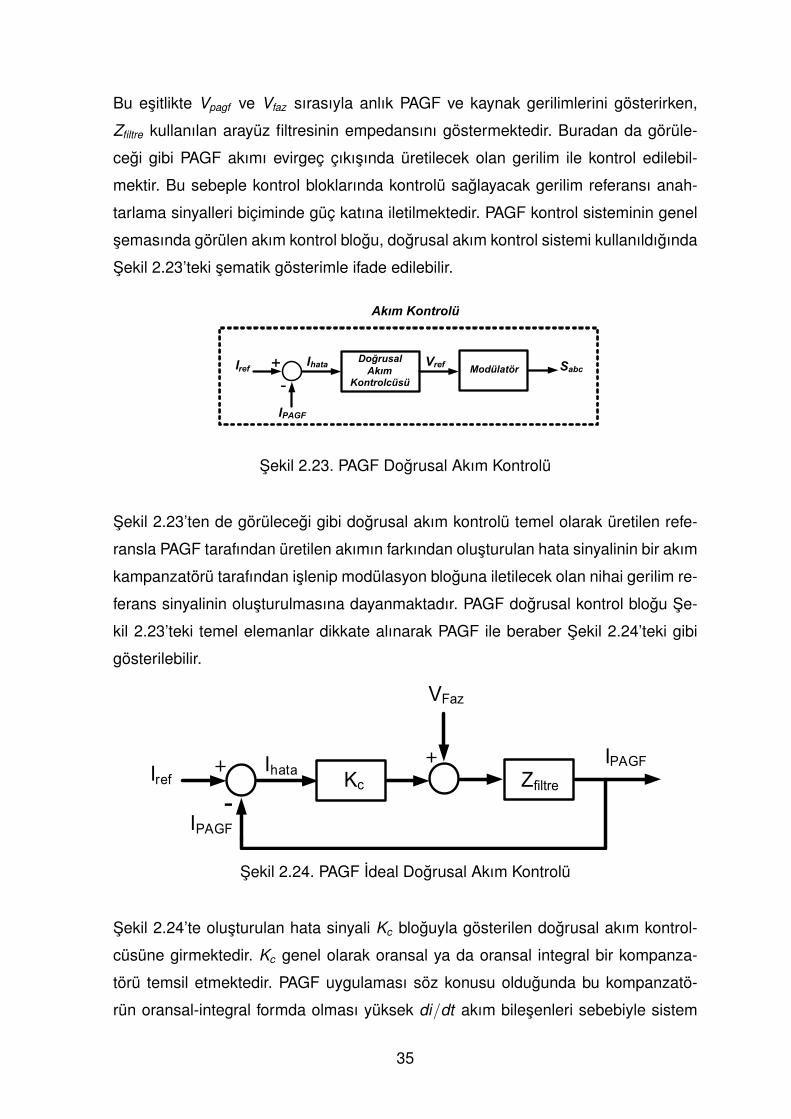
Bu esitlikte Vpagf ve Vfaz sırasıyla anlık PAGF ve kaynak gerilimlerini gösterirken,
Zfiltre kullanılan arayüz filtresinin empedansını göstermektedir. Buradan da görüle-
cegi gibi PAGF akımı evirgeç çıkısında üretilecek olan gerilim ile kontrol edilebil-
mektir. Bu sebeple kontrol bloklarında kontrolü saglayacak gerilim referansı anah-
tarlama sinyalleri biçiminde güç katına iletilmektedir. PAGF kontrol sisteminin genel
semasında görülen akım kontrol blogu, dogrusal akım kontrol sistemi kullanıldıgında
Sekil 2.23’teki sematik gösterimle ifade edilebilir.
Iref +
IPAGF
IhataDoğrusal
AkımKontrolcüsü-
VrefModülatör Sabc
Akım Kontrolü
Sekil 2.23. PAGF Dogrusal Akım Kontrolü
Sekil 2.23’ten de görülecegi gibi dogrusal akım kontrolü temel olarak üretilen refe-
ransla PAGF tarafından üretilen akımın farkından olusturulan hata sinyalinin bir akım
kampanzatörü tarafından islenip modülasyon bloguna iletilecek olan nihai gerilim re-
ferans sinyalinin olusturulmasına dayanmaktadır. PAGF dogrusal kontrol blogu Se-
kil 2.23’teki temel elemanlar dikkate alınarak PAGF ile beraber Sekil 2.24’teki gibi
gösterilebilir.
Iref
IPAGF
Ihata
-Kc Zfiltre
VFaz
IPAGF
Sekil 2.24. PAGF Ideal Dogrusal Akım Kontrolü
Sekil 2.24’te olusturulan hata sinyali Kc bloguyla gösterilen dogrusal akım kontrol-
cüsüne girmektedir. Kc genel olarak oransal ya da oransal integral bir kompanza-
törü temsil etmektedir. PAGF uygulaması söz konusu oldugunda bu kompanzatö-
rün oransal-integral formda olması yüksek di/dt akım bilesenleri sebebiyle sistem
35
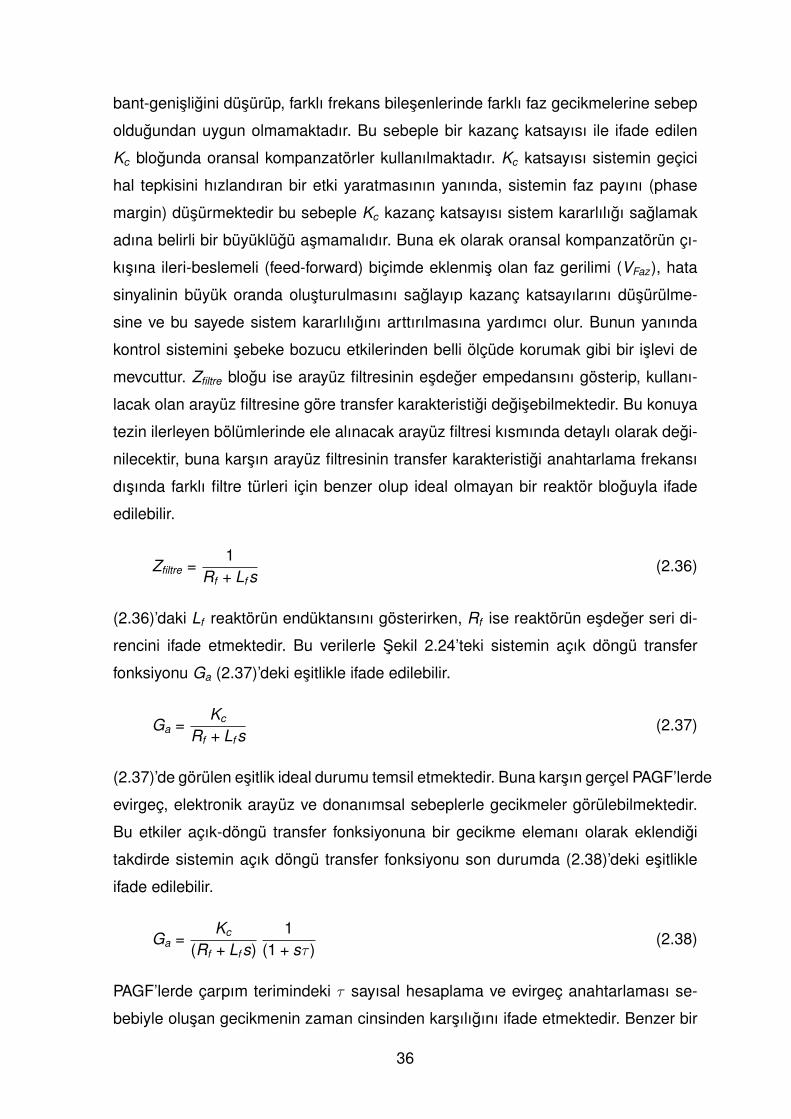
bant-genisligini düsürüp, farklı frekans bilesenlerinde farklı faz gecikmelerine sebep
oldugundan uygun olmamaktadır. Bu sebeple bir kazanç katsayısı ile ifade edilen
Kc blogunda oransal kompanzatörler kullanılmaktadır. Kc katsayısı sistemin geçici
hal tepkisini hızlandıran bir etki yaratmasının yanında, sistemin faz payını (phase
margin) düsürmektedir bu sebeple Kc kazanç katsayısı sistem kararlılıgı saglamak
adına belirli bir büyüklügü asmamalıdır. Buna ek olarak oransal kompanzatörün çı-
kısına ileri-beslemeli (feed-forward) biçimde eklenmis olan faz gerilimi (VFaz), hata
sinyalinin büyük oranda olusturulmasını saglayıp kazanç katsayılarını düsürülme-
sine ve bu sayede sistem kararlılıgını arttırılmasına yardımcı olur. Bunun yanında
kontrol sistemini sebeke bozucu etkilerinden belli ölçüde korumak gibi bir islevi de
mevcuttur. Zfiltre blogu ise arayüz filtresinin esdeger empedansını gösterip, kullanı-
lacak olan arayüz filtresine göre transfer karakteristigi degisebilmektedir. Bu konuya
tezin ilerleyen bölümlerinde ele alınacak arayüz filtresi kısmında detaylı olarak degi-
nilecektir, buna karsın arayüz filtresinin transfer karakteristigi anahtarlama frekansı
dısında farklı filtre türleri için benzer olup ideal olmayan bir reaktör bloguyla ifade
edilebilir.
Zfiltre =1
Rf + Lf s(2.36)
(2.36)’daki Lf reaktörün endüktansını gösterirken, Rf ise reaktörün esdeger seri di-
rencini ifade etmektedir. Bu verilerle Sekil 2.24’teki sistemin açık döngü transfer
fonksiyonu Ga (2.37)’deki esitlikle ifade edilebilir.
Ga =Kc
Rf + Lf s(2.37)
(2.37)’de görülen esitlik ideal durumu temsil etmektedir. Buna karsın gerçel PAGF’lerde
evirgeç, elektronik arayüz ve donanımsal sebeplerle gecikmeler görülebilmektedir.
Bu etkiler açık-döngü transfer fonksiyonuna bir gecikme elemanı olarak eklendigi
takdirde sistemin açık döngü transfer fonksiyonu son durumda (2.38)’deki esitlikle
ifade edilebilir.
Ga =Kc
(Rf + Lf s)1
(1 + sτ )(2.38)
PAGF’lerde çarpım terimindeki τ sayısal hesaplama ve evirgeç anahtarlaması se-
bebiyle olusan gecikmenin zaman cinsinden karsılıgını ifade etmektedir. Benzer bir
36
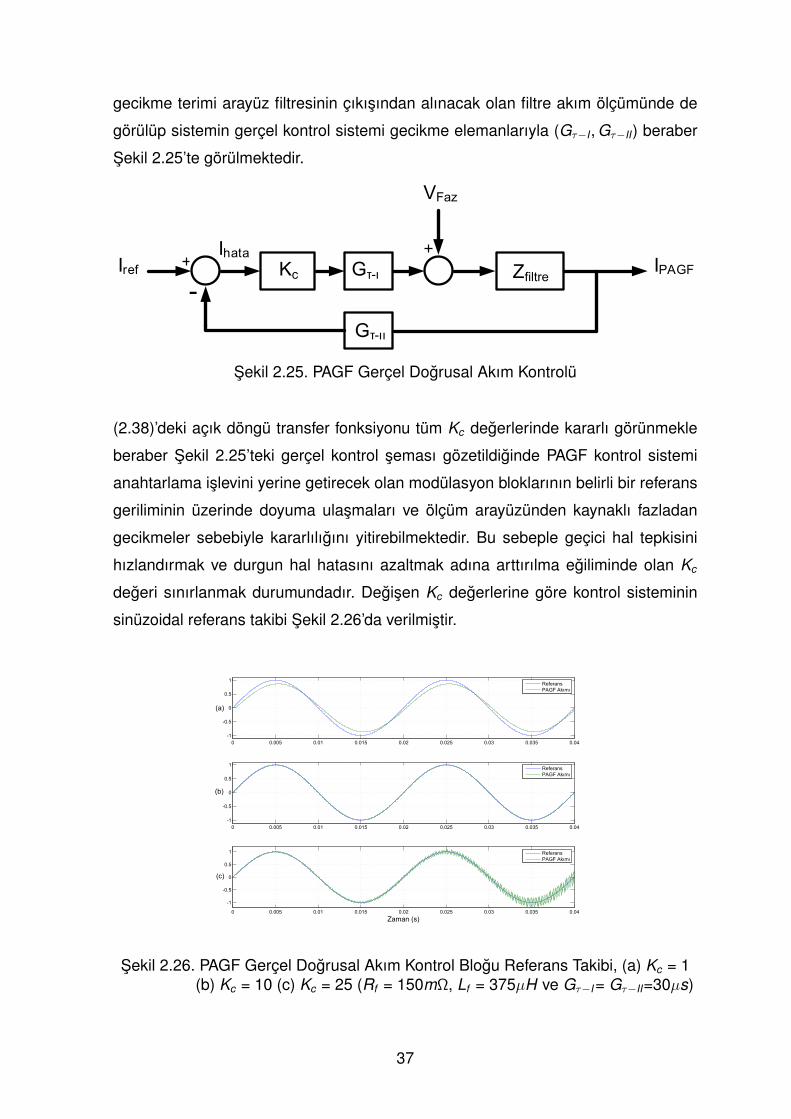
gecikme terimi arayüz filtresinin çıkısından alınacak olan filtre akım ölçümünde de
görülüp sistemin gerçel kontrol sistemi gecikme elemanlarıyla (Gτ−I , Gτ−II) beraber
Sekil 2.25’te görülmektedir.
IrefIhata
-Kc Zfiltre
VFaz
IPAGFGτ-ı
Gτ-ıı
Sekil 2.25. PAGF Gerçel Dogrusal Akım Kontrolü
(2.38)’deki açık döngü transfer fonksiyonu tüm Kc degerlerinde kararlı görünmekle
beraber Sekil 2.25’teki gerçel kontrol seması gözetildiginde PAGF kontrol sistemi
anahtarlama islevini yerine getirecek olan modülasyon bloklarının belirli bir referans
geriliminin üzerinde doyuma ulasmaları ve ölçüm arayüzünden kaynaklı fazladan
gecikmeler sebebiyle kararlılıgını yitirebilmektedir. Bu sebeple geçici hal tepkisini
hızlandırmak ve durgun hal hatasını azaltmak adına arttırılma egiliminde olan Kc
degeri sınırlanmak durumundadır. Degisen Kc degerlerine göre kontrol sisteminin
sinüzoidal referans takibi Sekil 2.26’da verilmistir.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
-1
-0.5
0
0.5
1
(a)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
-1
-0.5
0
0.5
1
(b)
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
-1
-0.5
0
0.5
1
Zaman (s)
(c)
Referans
PAGF Akımı
Referans
PAGF Akımı
Referans
PAGF Akımı
Sekil 2.26. PAGF Gerçel Dogrusal Akım Kontrol Blogu Referans Takibi, (a) Kc = 1(b) Kc = 10 (c) Kc = 25 (Rf = 150mΩ, Lf = 375µH ve Gτ−I = Gτ−II=30µs)
37
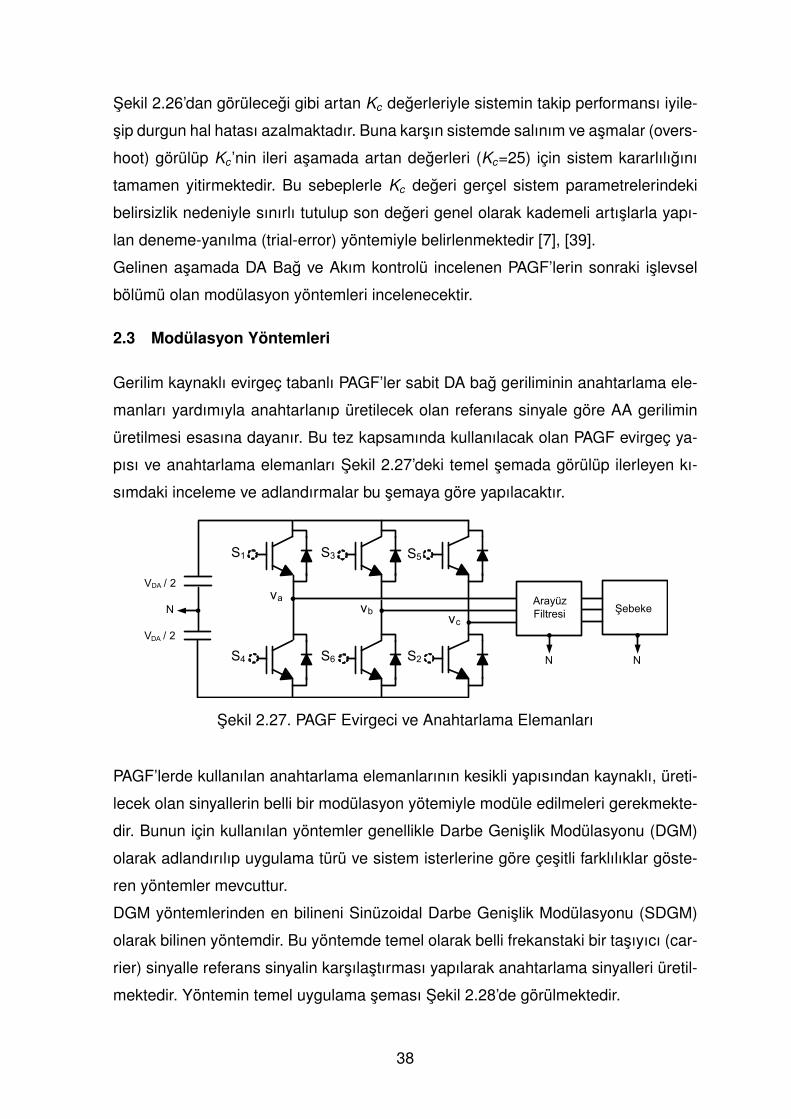
Sekil 2.26’dan görülecegi gibi artan Kc degerleriyle sistemin takip performansı iyile-
sip durgun hal hatası azalmaktadır. Buna karsın sistemde salınım ve asmalar (overs-
hoot) görülüp Kc ’nin ileri asamada artan degerleri (Kc=25) için sistem kararlılıgını
tamamen yitirmektedir. Bu sebeplerle Kc degeri gerçel sistem parametrelerindeki
belirsizlik nedeniyle sınırlı tutulup son degeri genel olarak kademeli artıslarla yapı-
lan deneme-yanılma (trial-error) yöntemiyle belirlenmektedir [7], [39].
Gelinen asamada DA Bag ve Akım kontrolü incelenen PAGF’lerin sonraki islevsel
bölümü olan modülasyon yöntemleri incelenecektir.
2.3 Modülasyon Yöntemleri
Gerilim kaynaklı evirgeç tabanlı PAGF’ler sabit DA bag geriliminin anahtarlama ele-
manları yardımıyla anahtarlanıp üretilecek olan referans sinyale göre AA gerilimin
üretilmesi esasına dayanır. Bu tez kapsamında kullanılacak olan PAGF evirgeç ya-
pısı ve anahtarlama elemanları Sekil 2.27’deki temel semada görülüp ilerleyen kı-
sımdaki inceleme ve adlandırmalar bu semaya göre yapılacaktır.
S1
S4
S3
S6
S5
S2
VDA / 2
VDA / 2
N
N
ArayüzFiltresi Şebeke
N
vavb
vc
Sekil 2.27. PAGF Evirgeci ve Anahtarlama Elemanları
PAGF’lerde kullanılan anahtarlama elemanlarının kesikli yapısından kaynaklı, üreti-
lecek olan sinyallerin belli bir modülasyon yötemiyle modüle edilmeleri gerekmekte-
dir. Bunun için kullanılan yöntemler genellikle Darbe Genislik Modülasyonu (DGM)
olarak adlandırılıp uygulama türü ve sistem isterlerine göre çesitli farklılıklar göste-
ren yöntemler mevcuttur.
DGM yöntemlerinden en bilineni Sinüzoidal Darbe Genislik Modülasyonu (SDGM)
olarak bilinen yöntemdir. Bu yöntemde temel olarak belli frekanstaki bir tasıyıcı (car-
rier) sinyalle referans sinyalin karsılastırması yapılarak anahtarlama sinyalleri üretil-
mektedir. Yöntemin temel uygulama seması Sekil 2.28’de görülmektedir.
38
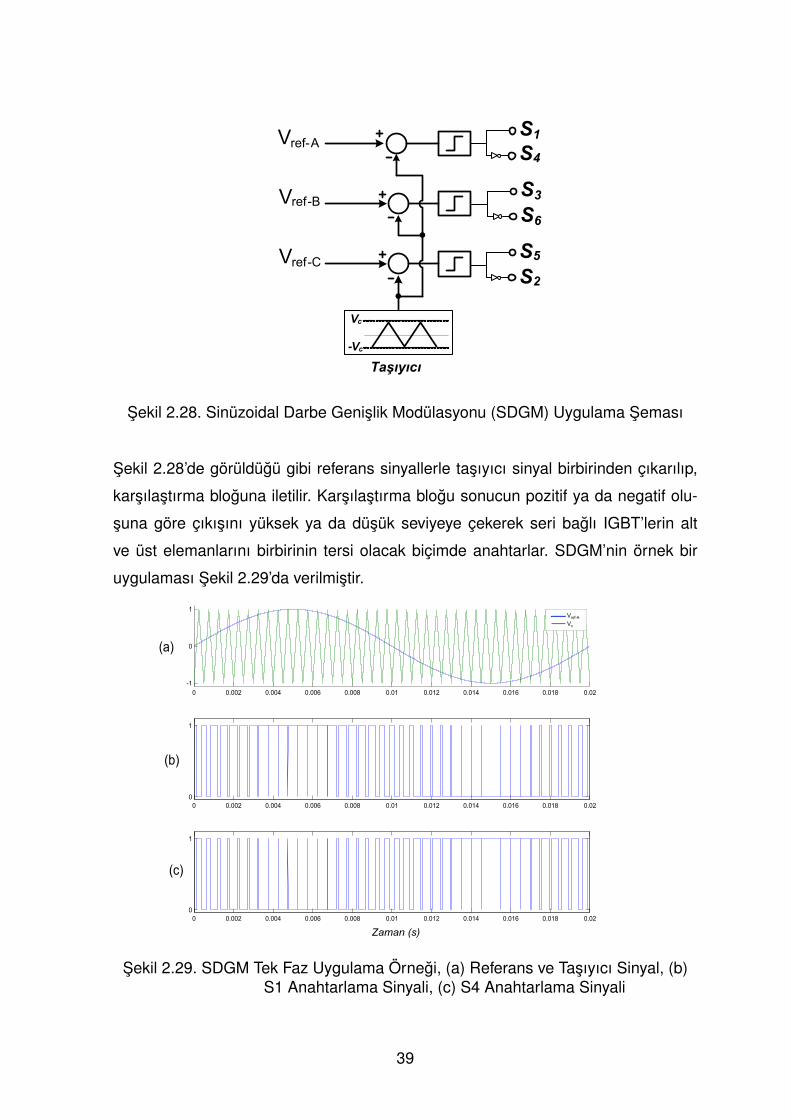
S4
Vref-A
Vref-B
Vref-C
Vc
-Vc
Taşıyıcı
S1
S3
S6
S5
S2
Sekil 2.28. Sinüzoidal Darbe Genislik Modülasyonu (SDGM) Uygulama Seması
Sekil 2.28’de görüldügü gibi referans sinyallerle tasıyıcı sinyal birbirinden çıkarılıp,
karsılastırma bloguna iletilir. Karsılastırma blogu sonucun pozitif ya da negatif olu-
suna göre çıkısını yüksek ya da düsük seviyeye çekerek seri baglı IGBT’lerin alt
ve üst elemanlarını birbirinin tersi olacak biçimde anahtarlar. SDGM’nin örnek bir
uygulaması Sekil 2.29’da verilmistir.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-1
0
1
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
1
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.020
1
Zaman (s)
(a)
(b)
(c)
Vref-AVc
Sekil 2.29. SDGM Tek Faz Uygulama Örnegi, (a) Referans ve Tasıyıcı Sinyal, (b)S1 Anahtarlama Sinyali, (c) S4 Anahtarlama Sinyali
39
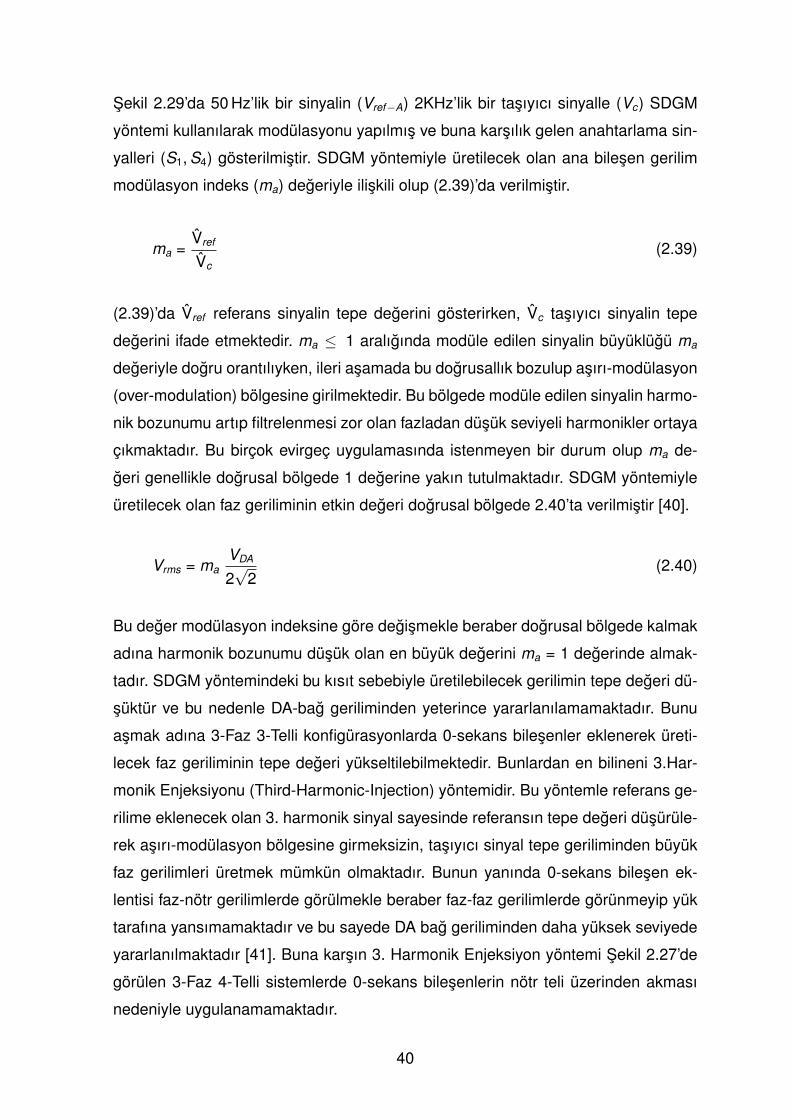
Sekil 2.29’da 50 Hz’lik bir sinyalin (Vref−A) 2KHz’lik bir tasıyıcı sinyalle (Vc) SDGM
yöntemi kullanılarak modülasyonu yapılmıs ve buna karsılık gelen anahtarlama sin-
yalleri (S1, S4) gösterilmistir. SDGM yöntemiyle üretilecek olan ana bilesen gerilim
modülasyon indeks (ma) degeriyle iliskili olup (2.39)’da verilmistir.
ma =Vref
Vc(2.39)
(2.39)’da Vref referans sinyalin tepe degerini gösterirken, Vc tasıyıcı sinyalin tepe
degerini ifade etmektedir. ma ≤ 1 aralıgında modüle edilen sinyalin büyüklügü ma
degeriyle dogru orantılıyken, ileri asamada bu dogrusallık bozulup asırı-modülasyon
(over-modulation) bölgesine girilmektedir. Bu bölgede modüle edilen sinyalin harmo-
nik bozunumu artıp filtrelenmesi zor olan fazladan düsük seviyeli harmonikler ortaya
çıkmaktadır. Bu birçok evirgeç uygulamasında istenmeyen bir durum olup ma de-
geri genellikle dogrusal bölgede 1 degerine yakın tutulmaktadır. SDGM yöntemiyle
üretilecek olan faz geriliminin etkin degeri dogrusal bölgede 2.40’ta verilmistir [40].
Vrms = maVDA
2√
2(2.40)
Bu deger modülasyon indeksine göre degismekle beraber dogrusal bölgede kalmak
adına harmonik bozunumu düsük olan en büyük degerini ma = 1 degerinde almak-
tadır. SDGM yöntemindeki bu kısıt sebebiyle üretilebilecek gerilimin tepe degeri dü-
süktür ve bu nedenle DA-bag geriliminden yeterince yararlanılamamaktadır. Bunu
asmak adına 3-Faz 3-Telli konfigürasyonlarda 0-sekans bilesenler eklenerek üreti-
lecek faz geriliminin tepe degeri yükseltilebilmektedir. Bunlardan en bilineni 3.Har-
monik Enjeksiyonu (Third-Harmonic-Injection) yöntemidir. Bu yöntemle referans ge-
rilime eklenecek olan 3. harmonik sinyal sayesinde referansın tepe degeri düsürüle-
rek asırı-modülasyon bölgesine girmeksizin, tasıyıcı sinyal tepe geriliminden büyük
faz gerilimleri üretmek mümkün olmaktadır. Bunun yanında 0-sekans bilesen ek-
lentisi faz-nötr gerilimlerde görülmekle beraber faz-faz gerilimlerde görünmeyip yük
tarafına yansımamaktadır ve bu sayede DA bag geriliminden daha yüksek seviyede
yararlanılmaktadır [41]. Buna karsın 3. Harmonik Enjeksiyon yöntemi Sekil 2.27’de
görülen 3-Faz 4-Telli sistemlerde 0-sekans bilesenlerin nötr teli üzerinden akması
nedeniyle uygulanamamaktadır.
40
SDGM yöntemi analog veya sayısal uygulama kolaylıgı açısından uzun yıllardır kul-
lanılıyor olmasına karsın DA-bag faydalanma oranı, dalga-sekli harmonik bozunumu
ve anahtarlama kayıpları açısından kimi dezavantajlar içerip yerini söz konusu bas-
lıklardan alternatif olabilcek modülasyon yöntemlerine bırakmaktadır [42]. Özellikle
yüksek performanslı sayısal islemcilerin ortaya çıkısıyla uygulamaları mümkün olan
vektör tabanlı modülasyon yöntemleri ortaya konmusutur. Bu yöntemlerden en bili-
neni Uzay Vektör Darbe Genislik Modülasyonu (UVDGM) olarak bilinen yöntem olup,
tez kapsamında bu yönteme dayalı bir modülasyon seması kullanılacaktır.
UVDGM yöntemi temel olarak evirgeçteki anahtarların farklı konumlarına karsılık ge-
len vektörel konumları kullanan bir anahtarlama algoritmasına dayalıdır. Bu yönte-
min temel avantajı referans sinyallerin diger yöntemlere oranla daha düsük harmonik
bozunumla üretilip, DA-bag faydalanma oranının yüksek olması ve bunun yanında
farklı sistem isterleri ve anahtarlama islevlerine kolay adapte edilebilir olusudur [43].
UVDGM yöntemi birçok farklı evirgeç yapısına uygulanabilir olmakla beraber 3-Faz
3 Telli sistemlerde ve nötr baglantısı içeren sistemlerde uygulamaları degisim gös-
termektedir. Bu durum, bu yöntemle üretilecek olan 0-sekans bilesenlerin faz-nötr
baglantı içeren sistemlerde farklı anahtarlama biçimlerinin kullanılmasından kaynak-
lanmaktadır. Nötr baglantısı içermeyen sistemler αβ düzleminde ifade edilebildigin-
den 2-Boyutlu düzlemsel UVDGM yöntemi kullanılırken Sekil 2.27’deki evirgeç ya-
pısı ve yük baglantısı geregi 0-sekans bilesenleri de içerdiginden 3-Boyutlu αβ0
düzleminde ifade edilmektedir. Bu tezde kullanılacak PAGF yapısı geregi 3-Boyutlu
UVDGM kullanılacak olup evirgeç anahtarlamalarından elde edilen faz gerilimlerinin
αβ0 dönüsümleri (2.41)’de görülmektedir.
vα
vβ
v0
=
√23
1 −12
−12
0√
32
−√
32
1√2
1√2
1√2
va
vb
vc
(2.41)
Bu dönüsüm neticesinde elde edilen PAGF evirgecinin her bir anahtarlama konu-
muna karsılık gelen αβ0 ve faz-nötr gerilim degerieri ile uzay vektörleri Çizelge 2.1’de
görülmektedir.
41
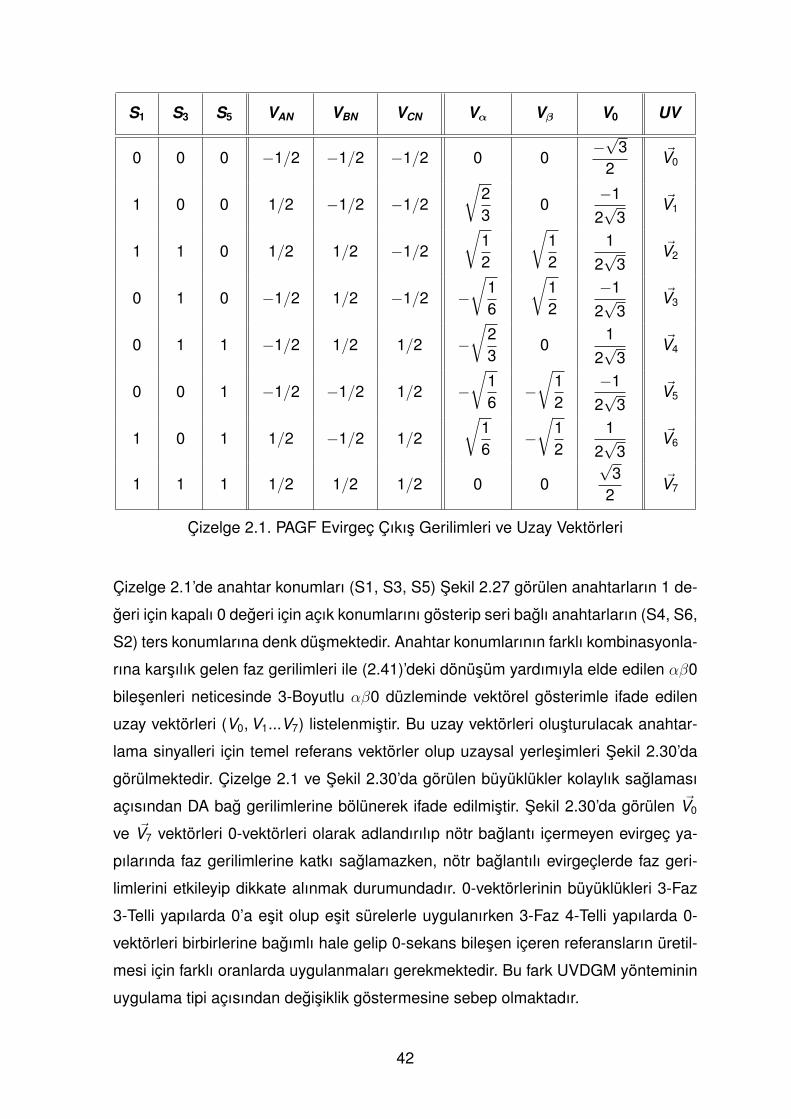
S1 S3 S5 VAN VBN VCN Vα Vβ V0 UV
0 0 0 −1/2 −1/2 −1/2 0 0−√
32
~V0
1 0 0 1/2 −1/2 −1/2
√23
0−1
2√
3~V1
1 1 0 1/2 1/2 −1/2
√12
√12
12√
3~V2
0 1 0 −1/2 1/2 −1/2 −√
16
√12
−12√
3~V3
0 1 1 −1/2 1/2 1/2 −√
23
01
2√
3~V4
0 0 1 −1/2 −1/2 1/2 −√
16
−√
12
−12√
3~V5
1 0 1 1/2 −1/2 1/2
√16
−√
12
12√
3~V6
1 1 1 1/2 1/2 1/2 0 0√
32
~V7
Çizelge 2.1. PAGF Evirgeç Çıkıs Gerilimleri ve Uzay Vektörleri
Çizelge 2.1’de anahtar konumları (S1, S3, S5) Sekil 2.27 görülen anahtarların 1 de-
geri için kapalı 0 degeri için açık konumlarını gösterip seri baglı anahtarların (S4, S6,
S2) ters konumlarına denk düsmektedir. Anahtar konumlarının farklı kombinasyonla-
rına karsılık gelen faz gerilimleri ile (2.41)’deki dönüsüm yardımıyla elde edilen αβ0
bilesenleri neticesinde 3-Boyutlu αβ0 düzleminde vektörel gösterimle ifade edilen
uzay vektörleri (V0, V1...V7) listelenmistir. Bu uzay vektörleri olusturulacak anahtar-
lama sinyalleri için temel referans vektörler olup uzaysal yerlesimleri Sekil 2.30’da
görülmektedir. Çizelge 2.1 ve Sekil 2.30’da görülen büyüklükler kolaylık saglaması
açısından DA bag gerilimlerine bölünerek ifade edilmistir. Sekil 2.30’da görülen ~V0
ve ~V7 vektörleri 0-vektörleri olarak adlandırılıp nötr baglantı içermeyen evirgeç ya-
pılarında faz gerilimlerine katkı saglamazken, nötr baglantılı evirgeçlerde faz geri-
limlerini etkileyip dikkate alınmak durumundadır. 0-vektörlerinin büyüklükleri 3-Faz
3-Telli yapılarda 0’a esit olup esit sürelerle uygulanırken 3-Faz 4-Telli yapılarda 0-
vektörleri birbirlerine bagımlı hale gelip 0-sekans bilesen içeren referansların üretil-
mesi için farklı oranlarda uygulanmaları gerekmektedir. Bu fark UVDGM yönteminin
uygulama tipi açısından degisiklik göstermesine sebep olmaktadır.
42
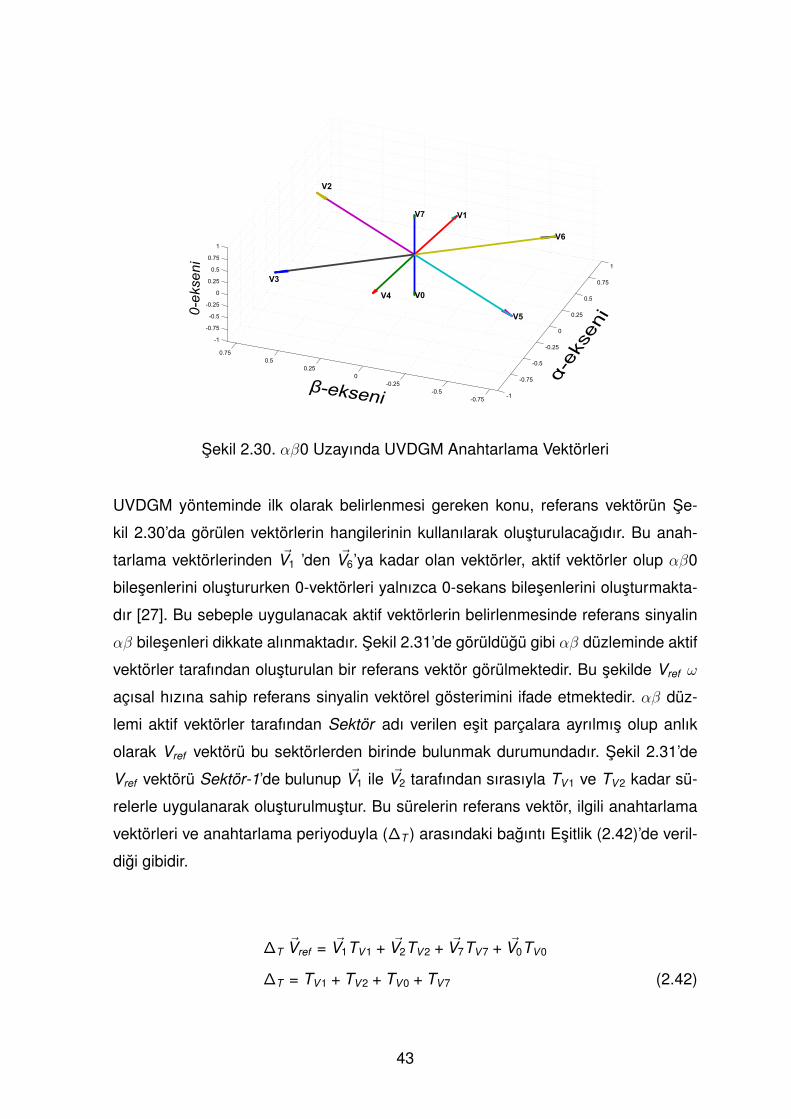
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
-0.75-0.5
-0.250
0.250.5
0.75
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
V6
V5
V1
V0
V7
V4
V2
V3
α-ekseni0-ekseni
β-ekseni
Sekil 2.30. αβ0 Uzayında UVDGM Anahtarlama Vektörleri
UVDGM yönteminde ilk olarak belirlenmesi gereken konu, referans vektörün Se-
kil 2.30’da görülen vektörlerin hangilerinin kullanılarak olusturulacagıdır. Bu anah-
tarlama vektörlerinden ~V1 ’den ~V6’ya kadar olan vektörler, aktif vektörler olup αβ0
bilesenlerini olustururken 0-vektörleri yalnızca 0-sekans bilesenlerini olusturmakta-
dır [27]. Bu sebeple uygulanacak aktif vektörlerin belirlenmesinde referans sinyalin
αβ bilesenleri dikkate alınmaktadır. Sekil 2.31’de görüldügü gibi αβ düzleminde aktif
vektörler tarafından olusturulan bir referans vektör görülmektedir. Bu sekilde Vref ω
açısal hızına sahip referans sinyalin vektörel gösterimini ifade etmektedir. αβ düz-
lemi aktif vektörler tarafından Sektör adı verilen esit parçalara ayrılmıs olup anlık
olarak Vref vektörü bu sektörlerden birinde bulunmak durumundadır. Sekil 2.31’de
Vref vektörü Sektör-1’de bulunup ~V1 ile ~V2 tarafından sırasıyla TV1 ve TV2 kadar sü-
relerle uygulanarak olusturulmustur. Bu sürelerin referans vektör, ilgili anahtarlama
vektörleri ve anahtarlama periyoduyla (∆T ) arasındaki bagıntı Esitlik (2.42)’de veril-
digi gibidir.
∆T~Vref = ~V1TV1 + ~V2TV2 + ~V7TV7 + ~V0TV0
∆T = TV1 + TV2 + TV0 + TV7 (2.42)
43
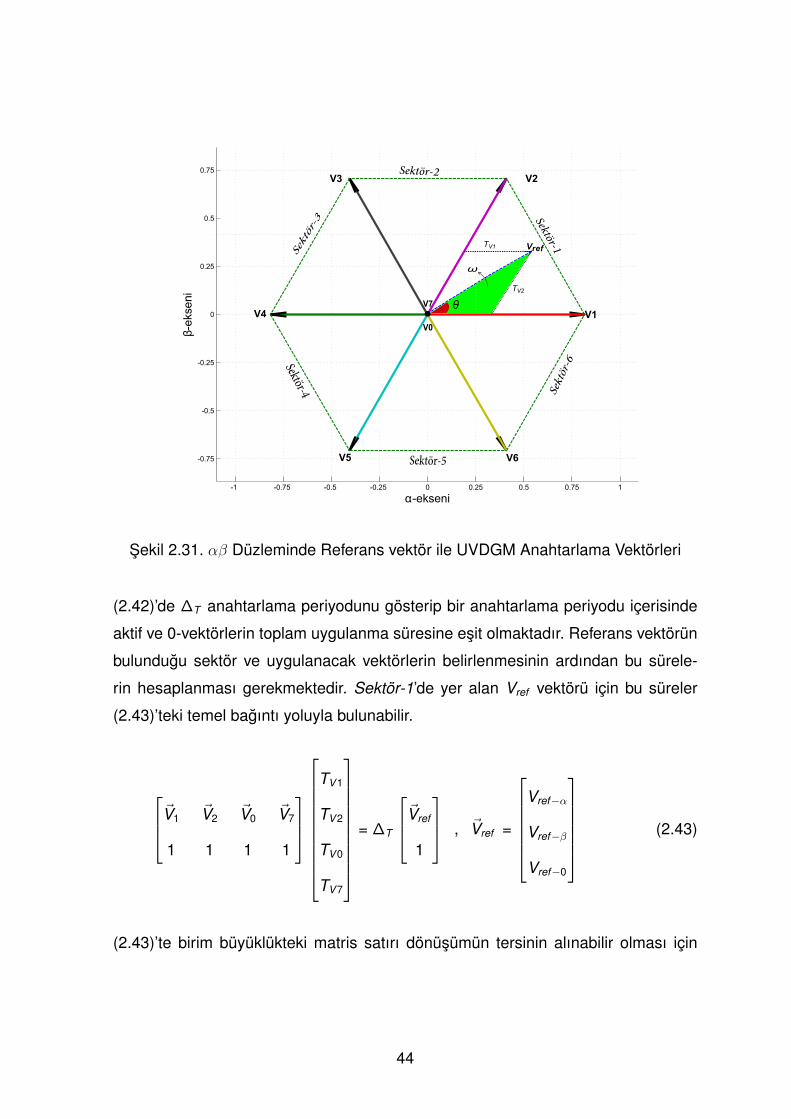
-1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
V1
V2
Vref
V6
α-ekseni
V0
V7
V5
V3
V4
β-ekseni
Sektör-1
Sektör-2
Sektör-3
Sektör-4
Sektör-5
Sektör-6
TV1
TV2
θ
ω
Sekil 2.31. αβ Düzleminde Referans vektör ile UVDGM Anahtarlama Vektörleri
(2.42)’de ∆T anahtarlama periyodunu gösterip bir anahtarlama periyodu içerisinde
aktif ve 0-vektörlerin toplam uygulanma süresine esit olmaktadır. Referans vektörün
bulundugu sektör ve uygulanacak vektörlerin belirlenmesinin ardından bu sürele-
rin hesaplanması gerekmektedir. Sektör-1’de yer alan Vref vektörü için bu süreler
(2.43)’teki temel bagıntı yoluyla bulunabilir.
~V1~V2
~V0~V7
1 1 1 1
TV1
TV2
TV0
TV7
= ∆T
~Vref
1
, ~Vref =
Vref−α
Vref−β
Vref−0
(2.43)
(2.43)’te birim büyüklükteki matris satırı dönüsümün tersinin alınabilir olması için
44
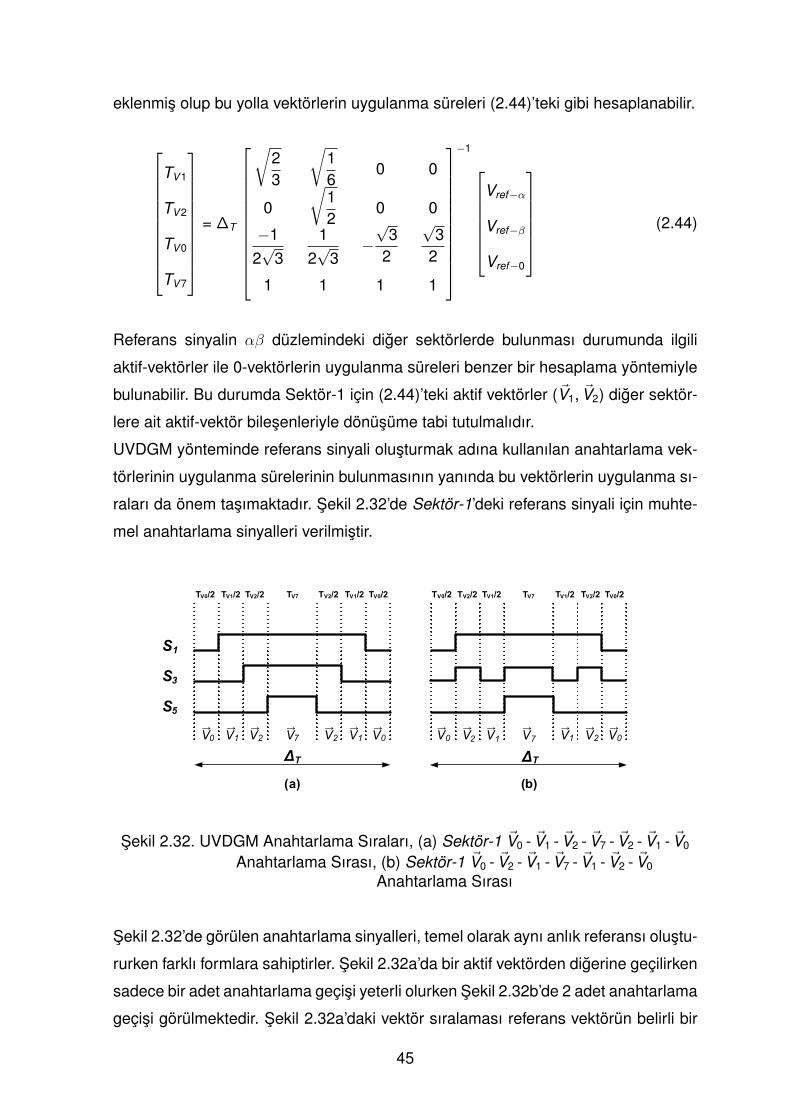
eklenmis olup bu yolla vektörlerin uygulanma süreleri (2.44)’teki gibi hesaplanabilir.
TV1
TV2
TV0
TV7
= ∆T
√23
√16
0 0
0
√12
0 0
−12√
31
2√
3−√
32
√3
2
1 1 1 1
−1 Vref−α
Vref−β
Vref−0
(2.44)
Referans sinyalin αβ düzlemindeki diger sektörlerde bulunması durumunda ilgili
aktif-vektörler ile 0-vektörlerin uygulanma süreleri benzer bir hesaplama yöntemiyle
bulunabilir. Bu durumda Sektör-1 için (2.44)’teki aktif vektörler (~V1, ~V2) diger sektör-
lere ait aktif-vektör bilesenleriyle dönüsüme tabi tutulmalıdır.
UVDGM yönteminde referans sinyali olusturmak adına kullanılan anahtarlama vek-
törlerinin uygulanma sürelerinin bulunmasının yanında bu vektörlerin uygulanma sı-
raları da önem tasımaktadır. Sekil 2.32’de Sektör-1’deki referans sinyali için muhte-
mel anahtarlama sinyalleri verilmistir.
S1
S3
S5
TV1/2TV0/2 TV2/2 TV7 TV1/2TV2/2 TV0/2
V0→
V1→
V2→
V7→
V2→
V1→
V0→
ΔT
(a)
V0→
TV2/2TV0/2 TV1/2 TV7 TV2/2TV1/2 TV0/2
V2→
V1→
V7→
V1→
V2→
V0→
ΔT
(b)
Sekil 2.32. UVDGM Anahtarlama Sıraları, (a) Sektör-1 ~V0 - ~V1 - ~V2 - ~V7 - ~V2 - ~V1 - ~V0
Anahtarlama Sırası, (b) Sektör-1 ~V0 - ~V2 - ~V1 - ~V7 - ~V1 - ~V2 - ~V0
Anahtarlama Sırası
Sekil 2.32’de görülen anahtarlama sinyalleri, temel olarak aynı anlık referansı olustu-
rurken farklı formlara sahiptirler. Sekil 2.32a’da bir aktif vektörden digerine geçilirken
sadece bir adet anahtarlama geçisi yeterli olurken Sekil 2.32b’de 2 adet anahtarlama
geçisi görülmektedir. Sekil 2.32a’daki vektör sıralaması referans vektörün belirli bir
45
anahtarlama frekansı için anahtarlama kayıplarını azaltmak adına mümkün olan en
az anahtarlama ile olusturulabilmesinden dolayı tercih edilmektedir. Bunun yanında
kullanılan ~V0 ve ~V7 vektörleri, referans vektörün sektör geçislerinde mümkün olan
en az anahtarlamayla olusturulmasını saglamak ve harmonik bozunumu azaltmak
adına anahtarlama periyoduna (∆T ) simetrik biçimde dagıtılmısır [41]. Bu yöntem
özellikle PAGF’lerde harmonik eleminasyonu birincil öncelikli ise kullanılmaktadır.
Diger sektörler için de benzer durum gözetildiginde anahtarlama vektörlerinin uygu-
lama sıraları Çizelge 2.2’de görüldügü gibi elde edilebilir.
Sektör-1 ~V0~V1
~V2~V7
~V2~V1
~V0
Sektör-2 ~V0~V3
~V2~V7
~V2~V3
~V0
Sektör-3 ~V0~V3
~V4~V7
~V4~V3
~V0
Sektör-4 ~V0~V5
~V4~V7
~V4~V5
~V0
Sektör-5 ~V0~V5
~V6~V7
~V6~V5
~V0
Sektör-6 ~V0~V1
~V6~V7
~V6~V1
~V0
Çizelge 2.2. UVDGM Sektör Anahtarlama Vektör Sıralamaları
Çizelge 2.2’den görülecegi gibi anahtarlama vektörlerinin uygulanma sıralamaları
sektör geçislerinde degistirilip, anahtarlama sayısı 0-vektörlerin de kullanımıyla azal-
tılmaktadır. Farklı tasarım isterleri(Reaktif Güç, Dengesizlik, Anahtarlama Kayıpları)
söz konusu oldugunda, anahtarlama vektörlerinin farklı dizilim ve uygulama biçimleri
kullanılabilmektedir [44].
3-Faz 4-Telli UVDGM yönteminde 0-vektörlerin aktif-vektörlerden bagımsız olarak
belirlenememesinden kaynaklı, 3-Faz 3-Telli UVDGM uygulamasında 0-vektörleri ile
mümkün olan 3. harmonik enjeksiyonu ile DA bag faydalanma (DC bus utilization)
oranı yükseltilememektedir. UVDGM uygulamalarında asırı-modülasyon aktif vek-
tör uygulanma sürelerinin (∆Tn -∆Tn+1) modülasyon periyodunu (∆T ) asması duru-
munda ortaya çıkmaktadır. Bu durum modülasyonun dogrusallıgını ortadan kaldırıp,
çıkıs sinyallerinin harmonik bozunumunun artmasına ve sinüzoidal yapılarının bo-
zulmasıyla sonuçlanmaktadır. Bu durumdan kaçınmak adına (2.45)’te görülen ba-
gıntıda aktif vektör uygulama süreleri (TVn , TVn+1) toplamının her sektör için ayrı ayrı
saglanması gerekmektedir.
TVn + TVn+1 ≤ ∆T (2.45)
46
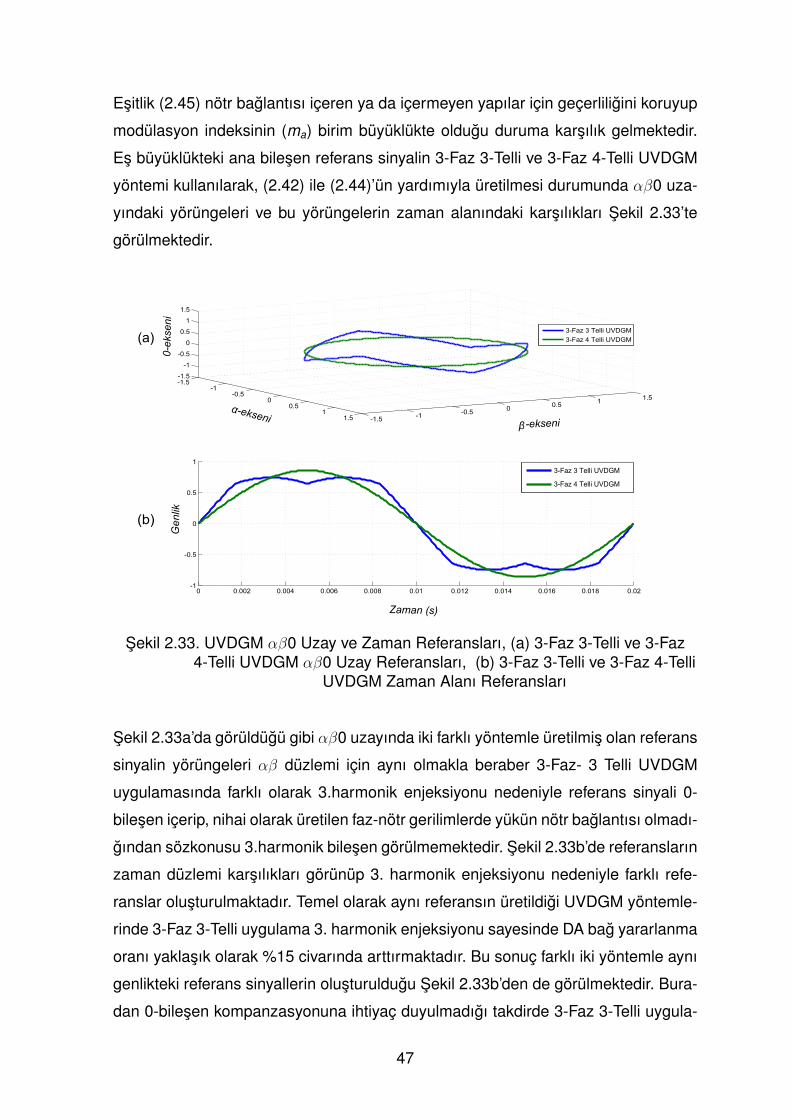
Esitlik (2.45) nötr baglantısı içeren ya da içermeyen yapılar için geçerliligini koruyup
modülasyon indeksinin (ma) birim büyüklükte oldugu duruma karsılık gelmektedir.
Es büyüklükteki ana bilesen referans sinyalin 3-Faz 3-Telli ve 3-Faz 4-Telli UVDGM
yöntemi kullanılarak, (2.42) ile (2.44)’ün yardımıyla üretilmesi durumunda αβ0 uza-
yındaki yörüngeleri ve bu yörüngelerin zaman alanındaki karsılıkları Sekil 2.33’te
görülmektedir.
-1.5-1
-0.50
0.51
1.5 -1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-1
-0.5
0
0.5
13-Faz 3 Telli UVDGM
3-Faz 4 Telli UVDGM
3-Faz 3 Telli UVDGM
3-Faz 4 Telli UVDGM(a)
(b)
α-ekseni -ekseniβ
0-e
kse
ni
Ge
nlik
Zaman (s)
Sekil 2.33. UVDGM αβ0 Uzay ve Zaman Referansları, (a) 3-Faz 3-Telli ve 3-Faz4-Telli UVDGM αβ0 Uzay Referansları, (b) 3-Faz 3-Telli ve 3-Faz 4-Telli
UVDGM Zaman Alanı Referansları
Sekil 2.33a’da görüldügü gibi αβ0 uzayında iki farklı yöntemle üretilmis olan referans
sinyalin yörüngeleri αβ düzlemi için aynı olmakla beraber 3-Faz- 3 Telli UVDGM
uygulamasında farklı olarak 3.harmonik enjeksiyonu nedeniyle referans sinyali 0-
bilesen içerip, nihai olarak üretilen faz-nötr gerilimlerde yükün nötr baglantısı olmadı-
gından sözkonusu 3.harmonik bilesen görülmemektedir. Sekil 2.33b’de referansların
zaman düzlemi karsılıkları görünüp 3. harmonik enjeksiyonu nedeniyle farklı refe-
ranslar olusturulmaktadır. Temel olarak aynı referansın üretildigi UVDGM yöntemle-
rinde 3-Faz 3-Telli uygulama 3. harmonik enjeksiyonu sayesinde DA bag yararlanma
oranı yaklasık olarak %15 civarında arttırmaktadır. Bu sonuç farklı iki yöntemle aynı
genlikteki referans sinyallerin olusturuldugu Sekil 2.33b’den de görülmektedir. Bura-
dan 0-bilesen kompanzasyonuna ihtiyaç duyulmadıgı takdirde 3-Faz 3-Telli uygula-
47
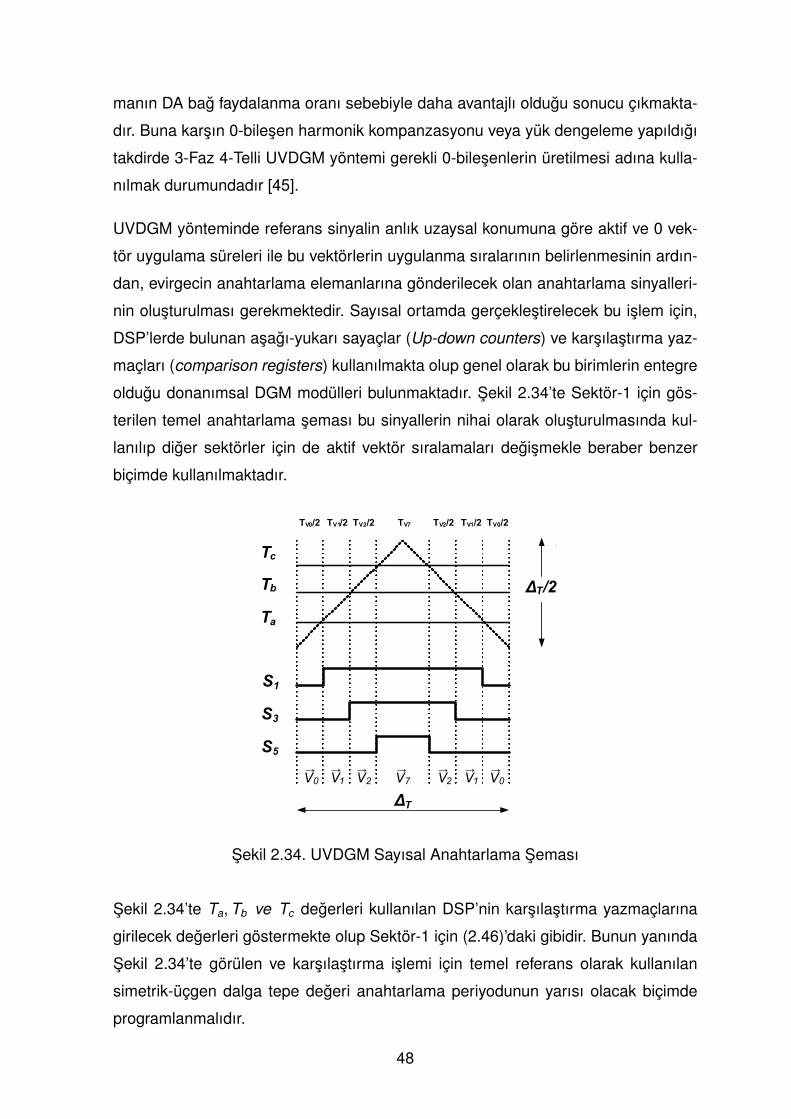
manın DA bag faydalanma oranı sebebiyle daha avantajlı oldugu sonucu çıkmakta-
dır. Buna karsın 0-bilesen harmonik kompanzasyonu veya yük dengeleme yapıldıgı
takdirde 3-Faz 4-Telli UVDGM yöntemi gerekli 0-bilesenlerin üretilmesi adına kulla-
nılmak durumundadır [45].
UVDGM yönteminde referans sinyalin anlık uzaysal konumuna göre aktif ve 0 vek-
tör uygulama süreleri ile bu vektörlerin uygulanma sıralarının belirlenmesinin ardın-
dan, evirgecin anahtarlama elemanlarına gönderilecek olan anahtarlama sinyalleri-
nin olusturulması gerekmektedir. Sayısal ortamda gerçeklestirelecek bu islem için,
DSP’lerde bulunan asagı-yukarı sayaçlar (Up-down counters) ve karsılastırma yaz-
maçları (comparison registers) kullanılmakta olup genel olarak bu birimlerin entegre
oldugu donanımsal DGM modülleri bulunmaktadır. Sekil 2.34’te Sektör-1 için gös-
terilen temel anahtarlama seması bu sinyallerin nihai olarak olusturulmasında kul-
lanılıp diger sektörler için de aktif vektör sıralamaları degismekle beraber benzer
biçimde kullanılmaktadır.
S1
S3
S5
TV1/2TV0/2 TV2/2 TV7 TV1/2TV2/2 TV0/2
V0→
V1→
V2→
V7→
V2→
V1→
V0→
ΔT
Ta
Tb
Tc
ΔT/2
Sekil 2.34. UVDGM Sayısal Anahtarlama Seması
Sekil 2.34’te Ta, Tb ve Tc degerleri kullanılan DSP’nin karsılastırma yazmaçlarına
girilecek degerleri göstermekte olup Sektör-1 için (2.46)’daki gibidir. Bunun yanında
Sekil 2.34’te görülen ve karsılastırma islemi için temel referans olarak kullanılan
simetrik-üçgen dalga tepe degeri anahtarlama periyodunun yarısı olacak biçimde
programlanmalıdır.
48
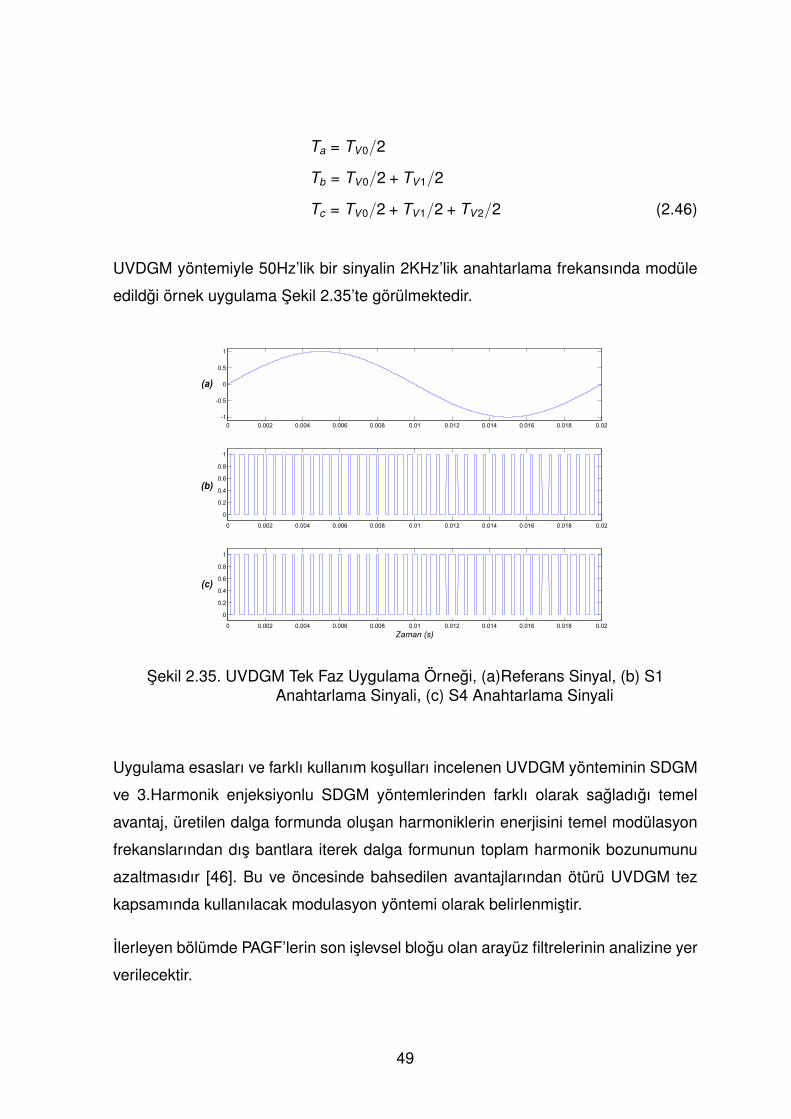
Ta = TV0/2
Tb = TV0/2 + TV1/2
Tc = TV0/2 + TV1/2 + TV2/2 (2.46)
UVDGM yöntemiyle 50Hz’lik bir sinyalin 2KHz’lik anahtarlama frekansında modüle
edildgi örnek uygulama Sekil 2.35’te görülmektedir.
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02-1
-0.5
0
0.5
1
(a)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
0.2
0.4
0.6
0.8
1
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
0.2
0.4
0.6
0.8
1
Zaman (s)
(b)
(c)
Sekil 2.35. UVDGM Tek Faz Uygulama Örnegi, (a)Referans Sinyal, (b) S1Anahtarlama Sinyali, (c) S4 Anahtarlama Sinyali
Uygulama esasları ve farklı kullanım kosulları incelenen UVDGM yönteminin SDGM
ve 3.Harmonik enjeksiyonlu SDGM yöntemlerinden farklı olarak sagladıgı temel
avantaj, üretilen dalga formunda olusan harmoniklerin enerjisini temel modülasyon
frekanslarından dıs bantlara iterek dalga formunun toplam harmonik bozunumunu
azaltmasıdır [46]. Bu ve öncesinde bahsedilen avantajlarından ötürü UVDGM tez
kapsamında kullanılacak modulasyon yöntemi olarak belirlenmistir.
Ilerleyen bölümde PAGF’lerin son islevsel blogu olan arayüz filtrelerinin analizine yer
verilecektir.
49
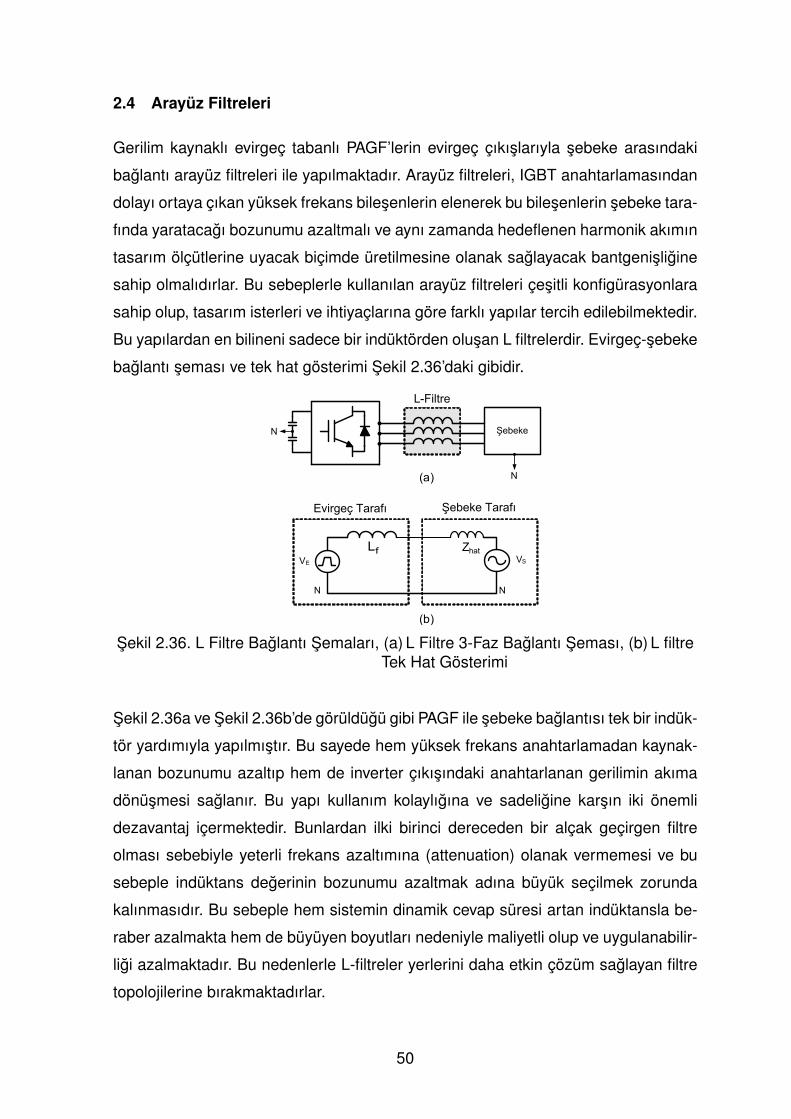
2.4 Arayüz Filtreleri
Gerilim kaynaklı evirgeç tabanlı PAGF’lerin evirgeç çıkıslarıyla sebeke arasındaki
baglantı arayüz filtreleri ile yapılmaktadır. Arayüz filtreleri, IGBT anahtarlamasından
dolayı ortaya çıkan yüksek frekans bilesenlerin elenerek bu bilesenlerin sebeke tara-
fında yaratacagı bozunumu azaltmalı ve aynı zamanda hedeflenen harmonik akımın
tasarım ölçütlerine uyacak biçimde üretilmesine olanak saglayacak bantgenisligine
sahip olmalıdırlar. Bu sebeplerle kullanılan arayüz filtreleri çesitli konfigürasyonlara
sahip olup, tasarım isterleri ve ihtiyaçlarına göre farklı yapılar tercih edilebilmektedir.
Bu yapılardan en bilineni sadece bir indüktörden olusan L filtrelerdir. Evirgeç-sebeke
baglantı seması ve tek hat gösterimi Sekil 2.36’daki gibidir.
Şebeke
N
L-Filtre
Şebeke Tarafı
VE
Evirgeç Tarafı
LfVS
(a)
(b)
N
N N
Zhat
Sekil 2.36. L Filtre Baglantı Semaları, (a) L Filtre 3-Faz Baglantı Seması, (b) L filtreTek Hat Gösterimi
Sekil 2.36a ve Sekil 2.36b’de görüldügü gibi PAGF ile sebeke baglantısı tek bir indük-
tör yardımıyla yapılmıstır. Bu sayede hem yüksek frekans anahtarlamadan kaynak-
lanan bozunumu azaltıp hem de inverter çıkısındaki anahtarlanan gerilimin akıma
dönüsmesi saglanır. Bu yapı kullanım kolaylıgına ve sadeligine karsın iki önemli
dezavantaj içermektedir. Bunlardan ilki birinci dereceden bir alçak geçirgen filtre
olması sebebiyle yeterli frekans azaltımına (attenuation) olanak vermemesi ve bu
sebeple indüktans degerinin bozunumu azaltmak adına büyük seçilmek zorunda
kalınmasıdır. Bu sebeple hem sistemin dinamik cevap süresi artan indüktansla be-
raber azalmakta hem de büyüyen boyutları nedeniyle maliyetli olup ve uygulanabilir-
ligi azalmaktadır. Bu nedenlerle L-filtreler yerlerini daha etkin çözüm saglayan filtre
topolojilerine bırakmaktadırlar.
50
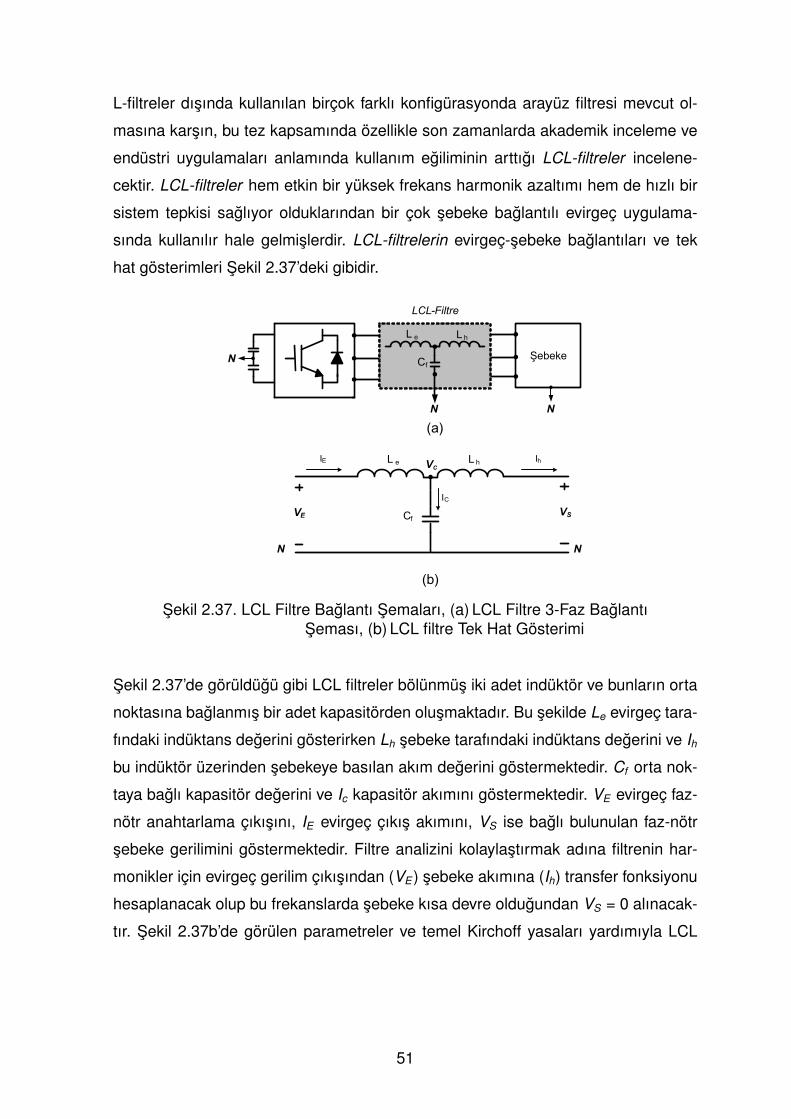
L-filtreler dısında kullanılan birçok farklı konfigürasyonda arayüz filtresi mevcut ol-
masına karsın, bu tez kapsamında özellikle son zamanlarda akademik inceleme ve
endüstri uygulamaları anlamında kullanım egiliminin arttıgı LCL-filtreler incelene-
cektir. LCL-filtreler hem etkin bir yüksek frekans harmonik azaltımı hem de hızlı bir
sistem tepkisi saglıyor olduklarından bir çok sebeke baglantılı evirgeç uygulama-
sında kullanılır hale gelmislerdir. LCL-filtrelerin evirgeç-sebeke baglantıları ve tek
hat gösterimleri Sekil 2.37’deki gibidir.
Şebeke
N
(a)
N
N
L e L h
Cf
LCL-Filtre
(b)
VE VS
L e
Cf
L h Ih
IC
N N
IEVC
Sekil 2.37. LCL Filtre Baglantı Semaları, (a) LCL Filtre 3-Faz BaglantıSeması, (b) LCL filtre Tek Hat Gösterimi
Sekil 2.37’de görüldügü gibi LCL filtreler bölünmüs iki adet indüktör ve bunların orta
noktasına baglanmıs bir adet kapasitörden olusmaktadır. Bu sekilde Le evirgeç tara-
fındaki indüktans degerini gösterirken Lh sebeke tarafındaki indüktans degerini ve Ih
bu indüktör üzerinden sebekeye basılan akım degerini göstermektedir. Cf orta nok-
taya baglı kapasitör degerini ve Ic kapasitör akımını göstermektedir. VE evirgeç faz-
nötr anahtarlama çıkısını, IE evirgeç çıkıs akımını, VS ise baglı bulunulan faz-nötr
sebeke gerilimini göstermektedir. Filtre analizini kolaylastırmak adına filtrenin har-
monikler için evirgeç gerilim çıkısından (VE ) sebeke akımına (Ih) transfer fonksiyonu
hesaplanacak olup bu frekanslarda sebeke kısa devre oldugundan VS = 0 alınacak-
tır. Sekil 2.37b’de görülen parametreler ve temel Kirchoff yasaları yardımıyla LCL
51
filtre transfer fonksiyonu (2.47)’deki esitlikler yoluyla hesaplanabilir.
IE = Ic + Ih (2.47a)
VE = IE sLe + Vc (2.47b)
Vc = Ih sLh (2.47c)
Ic = Vc sCf (2.47d)
Sırasıyla (2.47a), (2.47b)’ye yazılıp, Ic ifadesi (2.47c) ve (2.47d) kullanılarak yerine
yazıldıgı takdirde LCL filtre transfer fonksiyonu GLCL Esitlik (2.48)’deki gibi ifade edi-
lebilir.
GLCL(s) =IhVE
=1
Lh Le Cf s 3 + s(Le + Lh)(2.48)
(2.48)’den de görülecegi gibi LCL filtre topolojisi 3. derece bir alçak geçirgen filtreye
karsılık gelip, azaltım degeri −60dB/decade’dir. LCL filtrelerin tipik frekans tepkisi
Sekil 2.38’de görüldügü gibidir.
Sekil 2.38’de görüldügü gibi LCL filtrelerin öncesinde bahsedilen özellikleri tasımakla
beraber, belirli frekanslarda sistem kararlılıgını tehdit edebilecek rezonans olasılık-
ları vardır. (2.48)’den de görülebilecegi gibi rezonans frekansı fres, (2.49)’daki gibi
ifade edilebilir.
fres =1
2π
√Le + Lh
Lh Le Cf(2.49)
LCL filtrelerin temel sorunlarından biri olan rezonans tehlikesi sistem tasarımında
dikkate alınmak durumundadır. Rezonans olasılıgını ortadan kaldırmak adına çesitli
yöntemler önerilmis olup, bu yöntemler temel olarak pasif ve aktif sönümlendirme
(passive-active damping) yöntemleri olarak ikiye ayrılmaktadır.
Pasif sönümledirme, fazladan bir direncin LCL filtreye, kapasitöre seri biçimde ya da
sebeke baglantısının yapıldıgı indüktöre paralel biçimde eklenerek yapılabilmekte-
dir. Bu sayede kontrol sisteminde herhangi bir degisiklige gidilmeksizin rezonans sö-
nümlendirilebilirken, eklenen direnç sebebiyle güç kayıpları ortaya çıkıp sistem ve-
rimliligi azalabilmektedir. Aktif sönümlendirme ise sisteme fazladan eklenen akım ya
52
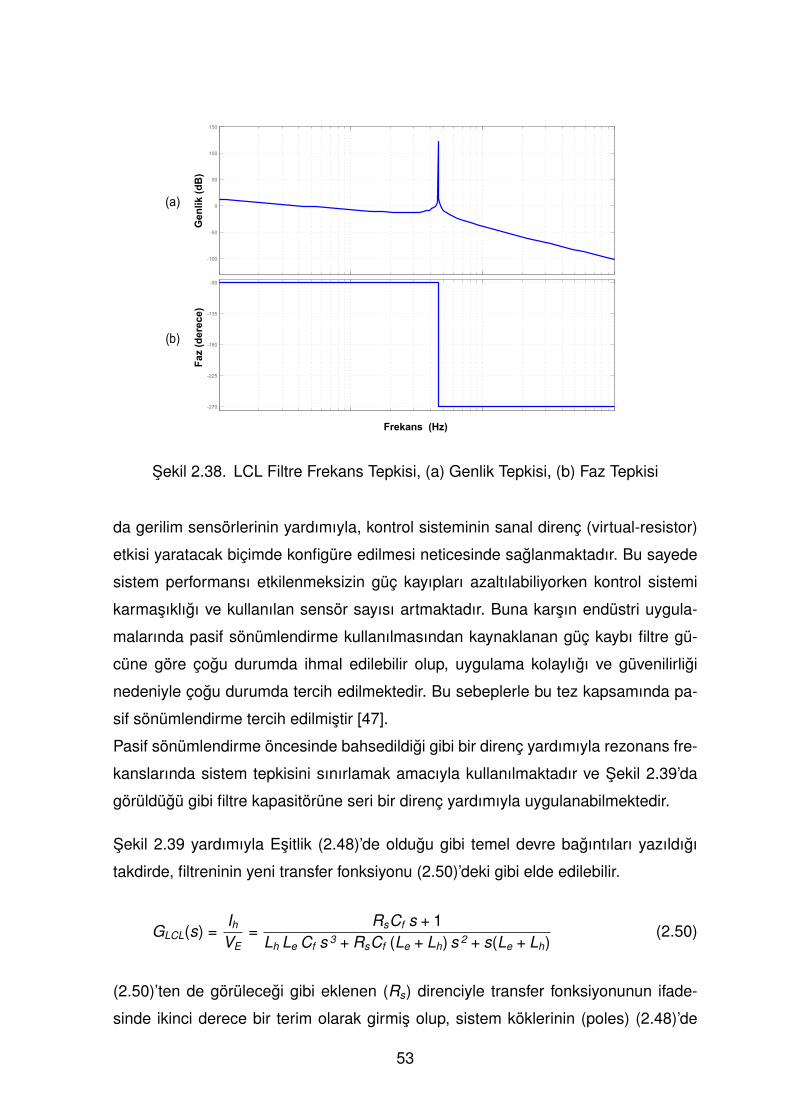
-100
-50
0
50
100
150
Gen
lik (
dB
)
-270
-225
-180
-135
-90
Faz
(d
erec
e)
Frekans (Hz)
(a)
(b)
Sekil 2.38. LCL Filtre Frekans Tepkisi, (a) Genlik Tepkisi, (b) Faz Tepkisi
da gerilim sensörlerinin yardımıyla, kontrol sisteminin sanal direnç (virtual-resistor)
etkisi yaratacak biçimde konfigüre edilmesi neticesinde saglanmaktadır. Bu sayede
sistem performansı etkilenmeksizin güç kayıpları azaltılabiliyorken kontrol sistemi
karmasıklıgı ve kullanılan sensör sayısı artmaktadır. Buna karsın endüstri uygula-
malarında pasif sönümlendirme kullanılmasından kaynaklanan güç kaybı filtre gü-
cüne göre çogu durumda ihmal edilebilir olup, uygulama kolaylıgı ve güvenilirligi
nedeniyle çogu durumda tercih edilmektedir. Bu sebeplerle bu tez kapsamında pa-
sif sönümlendirme tercih edilmistir [47].
Pasif sönümlendirme öncesinde bahsedildigi gibi bir direnç yardımıyla rezonans fre-
kanslarında sistem tepkisini sınırlamak amacıyla kullanılmaktadır ve Sekil 2.39’da
görüldügü gibi filtre kapasitörüne seri bir direnç yardımıyla uygulanabilmektedir.
Sekil 2.39 yardımıyla Esitlik (2.48)’de oldugu gibi temel devre bagıntıları yazıldıgı
takdirde, filtreninin yeni transfer fonksiyonu (2.50)’deki gibi elde edilebilir.
GLCL(s) =IhVE
=RsCf s + 1
Lh Le Cf s 3 + RsCf (Le + Lh) s 2 + s(Le + Lh)(2.50)
(2.50)’ten de görülecegi gibi eklenen (Rs) direnciyle transfer fonksiyonunun ifade-
sinde ikinci derece bir terim olarak girmis olup, sistem köklerinin (poles) (2.48)’de
53
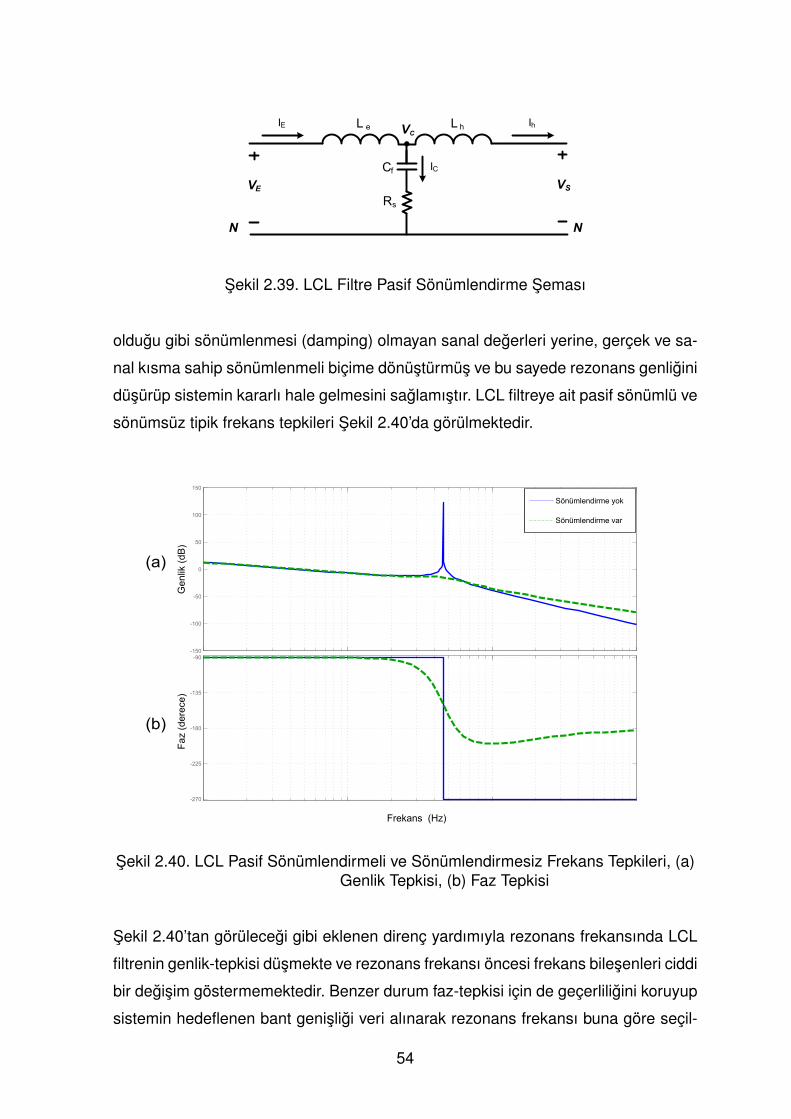
VE VS
L e
Cf
L h Ih
IC
N N
IEVC
Rs
Sekil 2.39. LCL Filtre Pasif Sönümlendirme Seması
oldugu gibi sönümlenmesi (damping) olmayan sanal degerleri yerine, gerçek ve sa-
nal kısma sahip sönümlenmeli biçime dönüstürmüs ve bu sayede rezonans genligini
düsürüp sistemin kararlı hale gelmesini saglamıstır. LCL filtreye ait pasif sönümlü ve
sönümsüz tipik frekans tepkileri Sekil 2.40’da görülmektedir.
-150
-100
-50
0
50
100
150
Ge
nlik
y(d
B)
-270
-225
-180
-135
-90
Fa
zy(d
erec
e)
Frekansy (Hz)
Sönümlendirmeyyok
Sönümlendirmeyvar
(a)
(b)
Sekil 2.40. LCL Pasif Sönümlendirmeli ve Sönümlendirmesiz Frekans Tepkileri, (a)Genlik Tepkisi, (b) Faz Tepkisi
Sekil 2.40’tan görülecegi gibi eklenen direnç yardımıyla rezonans frekansında LCL
filtrenin genlik-tepkisi düsmekte ve rezonans frekansı öncesi frekans bilesenleri ciddi
bir degisim göstermemektedir. Benzer durum faz-tepkisi için de geçerliligini koruyup
sistemin hedeflenen bant genisligi veri alınarak rezonans frekansı buna göre seçil-
54
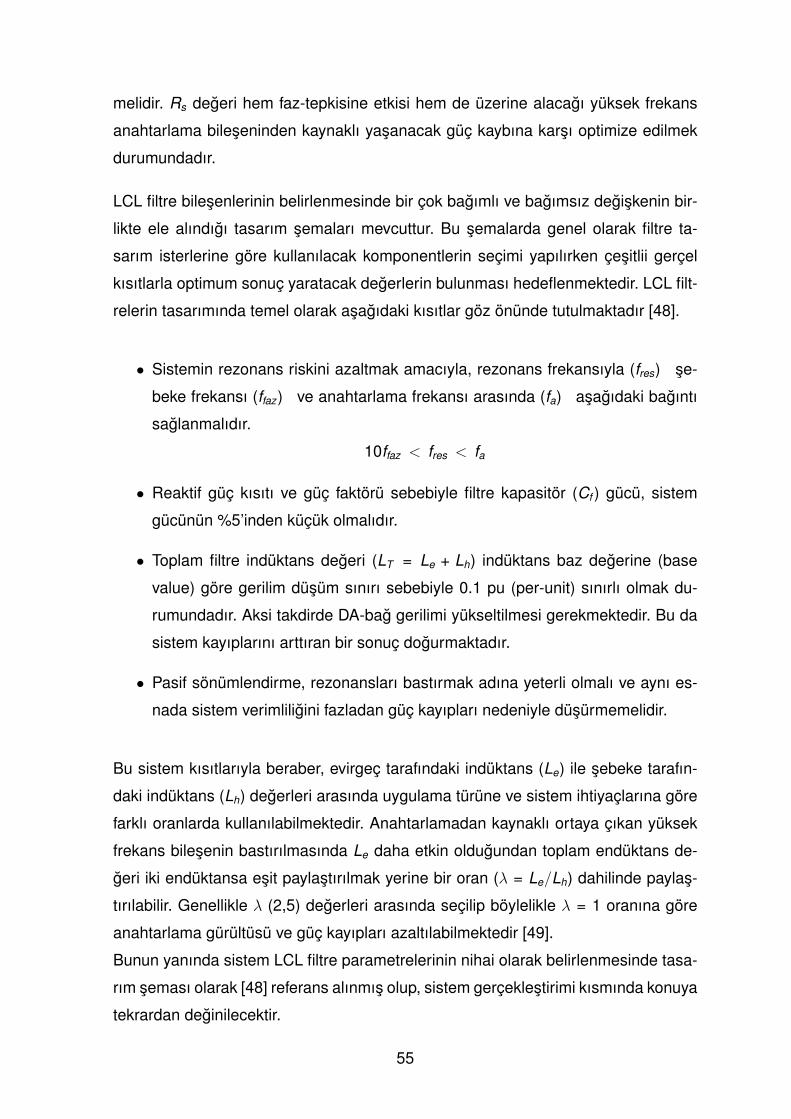
melidir. Rs degeri hem faz-tepkisine etkisi hem de üzerine alacagı yüksek frekans
anahtarlama bileseninden kaynaklı yasanacak güç kaybına karsı optimize edilmek
durumundadır.
LCL filtre bilesenlerinin belirlenmesinde bir çok bagımlı ve bagımsız degiskenin bir-
likte ele alındıgı tasarım semaları mevcuttur. Bu semalarda genel olarak filtre ta-
sarım isterlerine göre kullanılacak komponentlerin seçimi yapılırken çesitlii gerçel
kısıtlarla optimum sonuç yaratacak degerlerin bulunması hedeflenmektedir. LCL filt-
relerin tasarımında temel olarak asagıdaki kısıtlar göz önünde tutulmaktadır [48].
• Sistemin rezonans riskini azaltmak amacıyla, rezonans frekansıyla (fres) se-
beke frekansı (ffaz) ve anahtarlama frekansı arasında (fa) asagıdaki bagıntı
saglanmalıdır.
10ffaz < fres < fa
• Reaktif güç kısıtı ve güç faktörü sebebiyle filtre kapasitör (Cf ) gücü, sistem
gücünün %5’inden küçük olmalıdır.
• Toplam filtre indüktans degeri (LT = Le + Lh) indüktans baz degerine (base
value) göre gerilim düsüm sınırı sebebiyle 0.1 pu (per-unit) sınırlı olmak du-
rumundadır. Aksi takdirde DA-bag gerilimi yükseltilmesi gerekmektedir. Bu da
sistem kayıplarını arttıran bir sonuç dogurmaktadır.
• Pasif sönümlendirme, rezonansları bastırmak adına yeterli olmalı ve aynı es-
nada sistem verimliligini fazladan güç kayıpları nedeniyle düsürmemelidir.
Bu sistem kısıtlarıyla beraber, evirgeç tarafındaki indüktans (Le) ile sebeke tarafın-
daki indüktans (Lh) degerleri arasında uygulama türüne ve sistem ihtiyaçlarına göre
farklı oranlarda kullanılabilmektedir. Anahtarlamadan kaynaklı ortaya çıkan yüksek
frekans bilesenin bastırılmasında Le daha etkin oldugundan toplam endüktans de-
geri iki endüktansa esit paylastırılmak yerine bir oran (λ = Le/Lh) dahilinde paylas-
tırılabilir. Genellikle λ (2,5) degerleri arasında seçilip böylelikle λ = 1 oranına göre
anahtarlama gürültüsü ve güç kayıpları azaltılabilmektedir [49].
Bunun yanında sistem LCL filtre parametrelerinin nihai olarak belirlenmesinde tasa-
rım seması olarak [48] referans alınmıs olup, sistem gerçeklestirimi kısmında konuya
tekrardan deginilecektir.
55
2.5 Özet
Gelinen asamada PAGF’lerin yük çesitleri, referans çıkartım ve kontrol yöntemleri
ile islevsel bloklarına dair analiz tamamlanmıs olup sistemin kullanılmasına karar
verilen yapı ve yöntemlerle beraber son hali Sekil 2.41’de verilmistir.
A
B
C
Zhat
S1 S4
S3 S6
S5 S2
N
va
vb
vc
N
N
IFA
PAGF Güç Katı
IFB
IFC
IYA IYBIYC
VA VB VC
C1 C2
VDA-1
VDA-2
VDA-1 VDA-2
FazKilitMDöngü
RDFTHarmonikReferansÇıkartımı
θp
AkımKontrolcüsü
IFA
DA-BağReferansÇıkartım
IFB
IFC
UVDGM
S1
S4
S3
S6
S5
S2
IR
EF-A
IR
EF-B
IR
EF-C
LE
Lh
Cf
Ih
ata-A
Ih
ata
-B
Ih
ata
-C
PAGF
Kontrol Sistemi
Rs
Faz-NötrDoğrusalMOlmayan
Yük
N
Sekil 2.41. PAGF Güç Katı ve Kontrol Sistemi Genel Görünüm
56
3. SISTEM ÖN TASARIM ÇALISMASI
Tasarımı yapılacak olan PAGF’lerin çesitli yük tiplerine ve ihtiyaçlarına göre kullanı-
labilmesi adına belirli anma degerleriyle ifade edilmesi gerekmektedir. PAGF anma
degerleri harmonik eleme, reaktif güç kompanzasyonu ve yük dengeleme gibi kom-
panzasyon islevlerinin bir bilesimi olarak ortaya çıktıgından analitik bir ifadeyle ta-
nımlanabilmeleri güçtür. Buna karsın genel bir ifadeyle PAGF’ler güç faktörleri çok
düsük olmayan harmonik akım kaynagı karakteristigindeki yüklere anma degerleri
fazla yükseltilmeksizin uygulanabilmektedirler [50].
Bu sebeplerle bir çok PAGF üreticisi∗ † ürün özelliklerini uygulanabilecek yük ka-
rakteristiginin yerine, PAGF’nin anma akım degerleri biçiminde ifade etmektedirler.
Bu tez kapasamında tasarlanacak olan PAGF’nin temel olarak 100 ila 200kVA ara-
sındaki harmonik akım kaynagı tipindeki yüklere uygulanabilecegi varsayımıyla faz
basına toplamda 60A etkin degerli evirgeç akımını 400V’luk alçak gerilim baraya di-
rekt olarak baglanarak üretebilmesi amaçlanmıstır. Bunun yanında nötr akım tasıma
kapasitesi sınır dengesizlik degerlerinde hat akımının 3 katı olarak belirlenmistir.
Tasarlanan aktif filtrenin ilgili sistem bilesenlerinin anma degerleri yukarıda verilen
degerler dikkate alınarak yapılacaktır.
3.1 Sistem Bilesenlerinin Belirlenmesi
Önceki bölümlerde teorik analizi yapılan PAGF’lerin, gerçeklestirim asamasından
önce kullanılacak sistem bilesenlerinin sistem isterlerine göre özelliklerine ve anma
degerlerine karar verilmesi gerekmektedir. Bu ön çalısmayla sistemin beklenen per-
formansı göstermesi adına kullanılacak bilesenlerin saptanıp temin edilmesi amaç-
lanmıstır. Belirlenecek sistem bilesen özelliklerinden baslıcaları asagıdaki gibi sıra-
lanabilir.
• DA-Bag Kapasitörlerinin Seçimi
• Lamine Baranın Olusturulması
• IGBT ve IGBT Sürücülerinin Seçimi
• Arayüz Filtre Elemanlarının seçimi∗ABB Power Quality Filters - PQFI - PQFM - PQFS, http://www.abb.com (2014)†Schneider Electric, AccuSine PCS-LV Active Harmonic Filters, http://www.schneider-electric.com (2014)
57
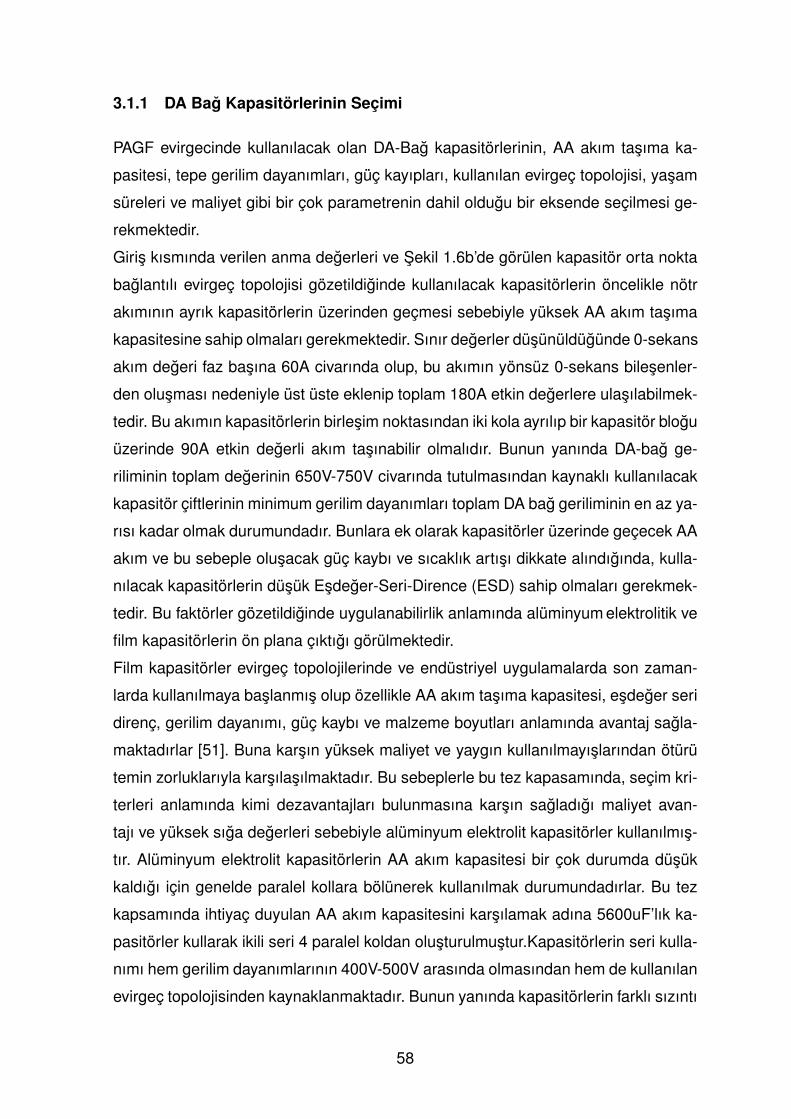
3.1.1 DA Bag Kapasitörlerinin Seçimi
PAGF evirgecinde kullanılacak olan DA-Bag kapasitörlerinin, AA akım tasıma ka-
pasitesi, tepe gerilim dayanımları, güç kayıpları, kullanılan evirgeç topolojisi, yasam
süreleri ve maliyet gibi bir çok parametrenin dahil oldugu bir eksende seçilmesi ge-
rekmektedir.
Giris kısmında verilen anma degerleri ve Sekil 1.6b’de görülen kapasitör orta nokta
baglantılı evirgeç topolojisi gözetildiginde kullanılacak kapasitörlerin öncelikle nötr
akımının ayrık kapasitörlerin üzerinden geçmesi sebebiyle yüksek AA akım tasıma
kapasitesine sahip olmaları gerekmektedir. Sınır degerler düsünüldügünde 0-sekans
akım degeri faz basına 60A civarında olup, bu akımın yönsüz 0-sekans bilesenler-
den olusması nedeniyle üst üste eklenip toplam 180A etkin degerlere ulasılabilmek-
tedir. Bu akımın kapasitörlerin birlesim noktasından iki kola ayrılıp bir kapasitör blogu
üzerinde 90A etkin degerli akım tasınabilir olmalıdır. Bunun yanında DA-bag ge-
riliminin toplam degerinin 650V-750V civarında tutulmasından kaynaklı kullanılacak
kapasitör çiftlerinin minimum gerilim dayanımları toplam DA bag geriliminin en az ya-
rısı kadar olmak durumundadır. Bunlara ek olarak kapasitörler üzerinde geçecek AA
akım ve bu sebeple olusacak güç kaybı ve sıcaklık artısı dikkate alındıgında, kulla-
nılacak kapasitörlerin düsük Esdeger-Seri-Dirence (ESD) sahip olmaları gerekmek-
tedir. Bu faktörler gözetildiginde uygulanabilirlik anlamında alüminyum elektrolitik ve
film kapasitörlerin ön plana çıktıgı görülmektedir.
Film kapasitörler evirgeç topolojilerinde ve endüstriyel uygulamalarda son zaman-
larda kullanılmaya baslanmıs olup özellikle AA akım tasıma kapasitesi, esdeger seri
direnç, gerilim dayanımı, güç kaybı ve malzeme boyutları anlamında avantaj sagla-
maktadırlar [51]. Buna karsın yüksek maliyet ve yaygın kullanılmayıslarından ötürü
temin zorluklarıyla karsılasılmaktadır. Bu sebeplerle bu tez kapasamında, seçim kri-
terleri anlamında kimi dezavantajları bulunmasına karsın sagladıgı maliyet avan-
tajı ve yüksek sıga degerleri sebebiyle alüminyum elektrolit kapasitörler kullanılmıs-
tır. Alüminyum elektrolit kapasitörlerin AA akım kapasitesi bir çok durumda düsük
kaldıgı için genelde paralel kollara bölünerek kullanılmak durumundadırlar. Bu tez
kapsamında ihtiyaç duyulan AA akım kapasitesini karsılamak adına 5600uF’lık ka-
pasitörler kullarak ikili seri 4 paralel koldan olusturulmustur.Kapasitörlerin seri kulla-
nımı hem gerilim dayanımlarının 400V-500V arasında olmasından hem de kullanılan
evirgeç topolojisinden kaynaklanmaktadır. Bunun yanında kapasitörlerin farklı sızıntı
58
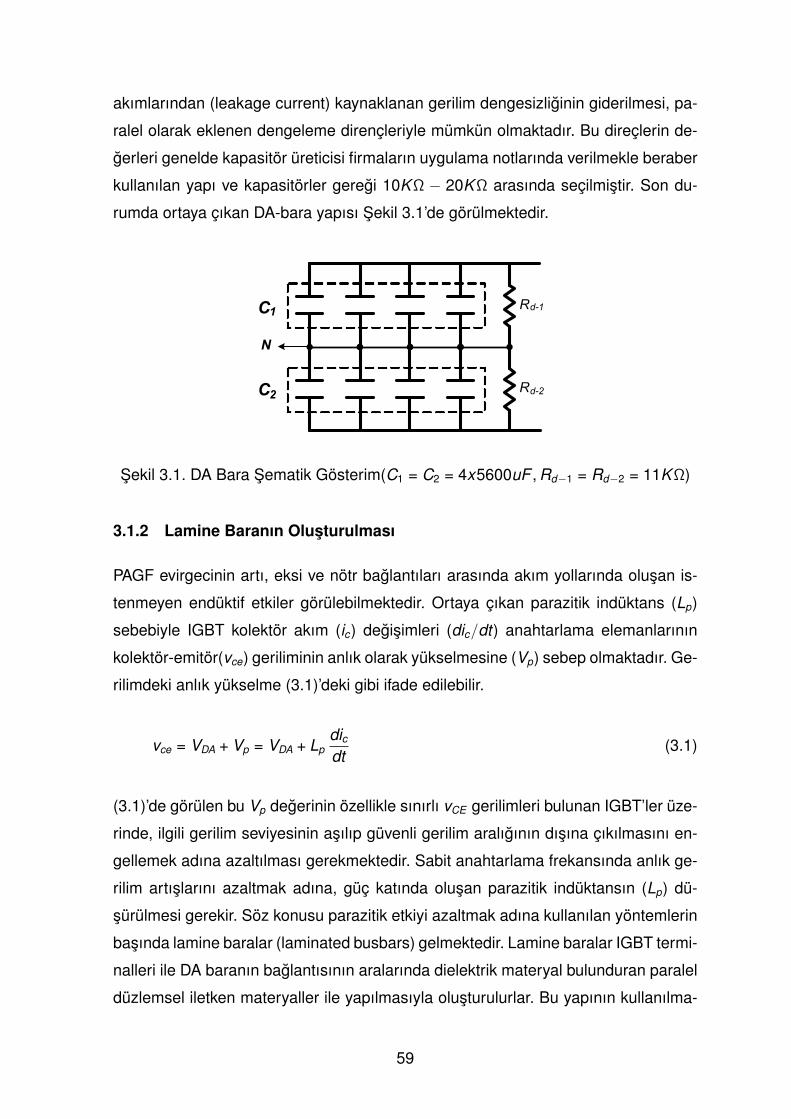
akımlarından (leakage current) kaynaklanan gerilim dengesizliginin giderilmesi, pa-
ralel olarak eklenen dengeleme dirençleriyle mümkün olmaktadır. Bu direçlerin de-
gerleri genelde kapasitör üreticisi firmaların uygulama notlarında verilmekle beraber
kullanılan yapı ve kapasitörler geregi 10KΩ − 20KΩ arasında seçilmistir. Son du-
rumda ortaya çıkan DA-bara yapısı Sekil 3.1’de görülmektedir.
Rd-1
Rd-2
N
C1
C2
Sekil 3.1. DA Bara Sematik Gösterim(C1 = C2 = 4x5600uF , Rd−1 = Rd−2 = 11KΩ)
3.1.2 Lamine Baranın Olusturulması
PAGF evirgecinin artı, eksi ve nötr baglantıları arasında akım yollarında olusan is-
tenmeyen endüktif etkiler görülebilmektedir. Ortaya çıkan parazitik indüktans (Lp)
sebebiyle IGBT kolektör akım (ic) degisimleri (dic/dt) anahtarlama elemanlarının
kolektör-emitör(vce) geriliminin anlık olarak yükselmesine (Vp) sebep olmaktadır. Ge-
rilimdeki anlık yükselme (3.1)’deki gibi ifade edilebilir.
vce = VDA + Vp = VDA + Lpdicdt
(3.1)
(3.1)’de görülen bu Vp degerinin özellikle sınırlı vCE gerilimleri bulunan IGBT’ler üze-
rinde, ilgili gerilim seviyesinin asılıp güvenli gerilim aralıgının dısına çıkılmasını en-
gellemek adına azaltılması gerekmektedir. Sabit anahtarlama frekansında anlık ge-
rilim artıslarını azaltmak adına, güç katında olusan parazitik indüktansın (Lp) dü-
sürülmesi gerekir. Söz konusu parazitik etkiyi azaltmak adına kullanılan yöntemlerin
basında lamine baralar (laminated busbars) gelmektedir. Lamine baralar IGBT termi-
nalleri ile DA baranın baglantısının aralarında dielektrik materyal bulunduran paralel
düzlemsel iletken materyaller ile yapılmasıyla olusturulurlar. Bu yapının kullanılma-
59
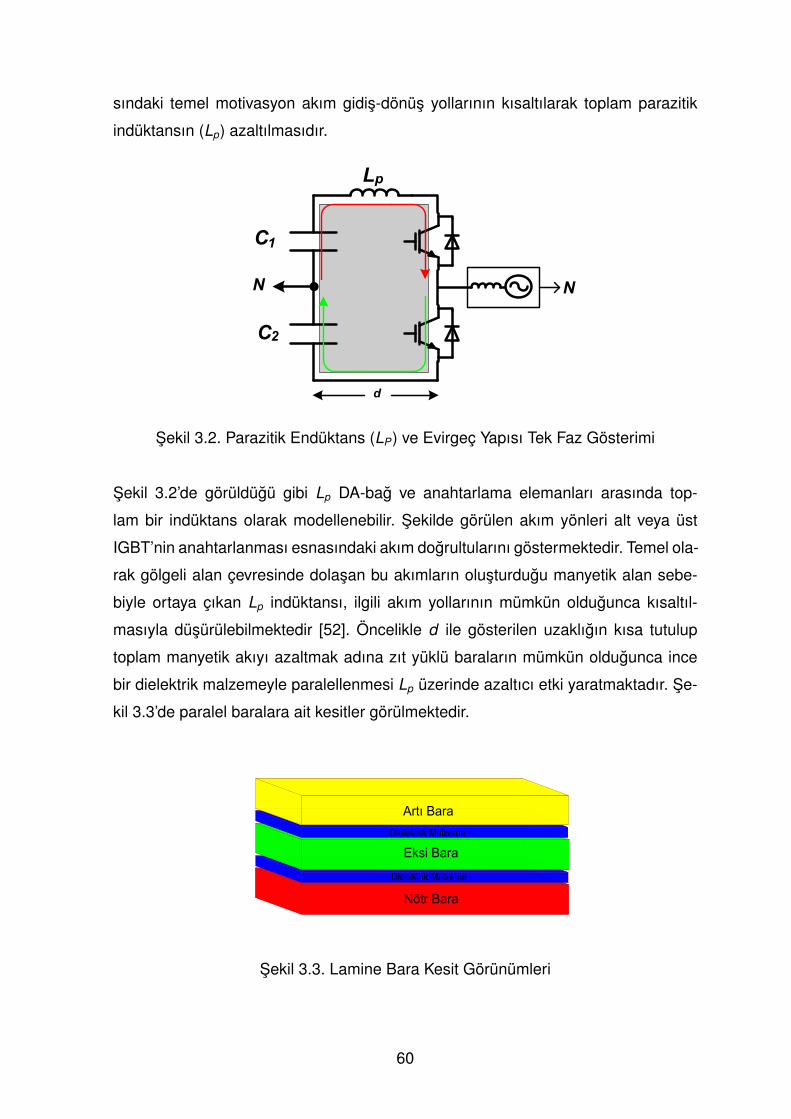
sındaki temel motivasyon akım gidis-dönüs yollarının kısaltılarak toplam parazitik
indüktansın (Lp) azaltılmasıdır.
N
C1
C2
Lp
N
d
Sekil 3.2. Parazitik Endüktans (LP) ve Evirgeç Yapısı Tek Faz Gösterimi
Sekil 3.2’de görüldügü gibi Lp DA-bag ve anahtarlama elemanları arasında top-
lam bir indüktans olarak modellenebilir. Sekilde görülen akım yönleri alt veya üst
IGBT’nin anahtarlanması esnasındaki akım dogrultularını göstermektedir. Temel ola-
rak gölgeli alan çevresinde dolasan bu akımların olusturdugu manyetik alan sebe-
biyle ortaya çıkan Lp indüktansı, ilgili akım yollarının mümkün oldugunca kısaltıl-
masıyla düsürülebilmektedir [52]. Öncelikle d ile gösterilen uzaklıgın kısa tutulup
toplam manyetik akıyı azaltmak adına zıt yüklü baraların mümkün oldugunca ince
bir dielektrik malzemeyle paralellenmesi Lp üzerinde azaltıcı etki yaratmaktadır. Se-
kil 3.3’de paralel baralara ait kesitler görülmektedir.
Artı Bara
Eksi Bara
Nötr Bara
Dielektrik Malzeme
Dielektrik Malzeme
Sekil 3.3. Lamine Bara Kesit Görünümleri
60
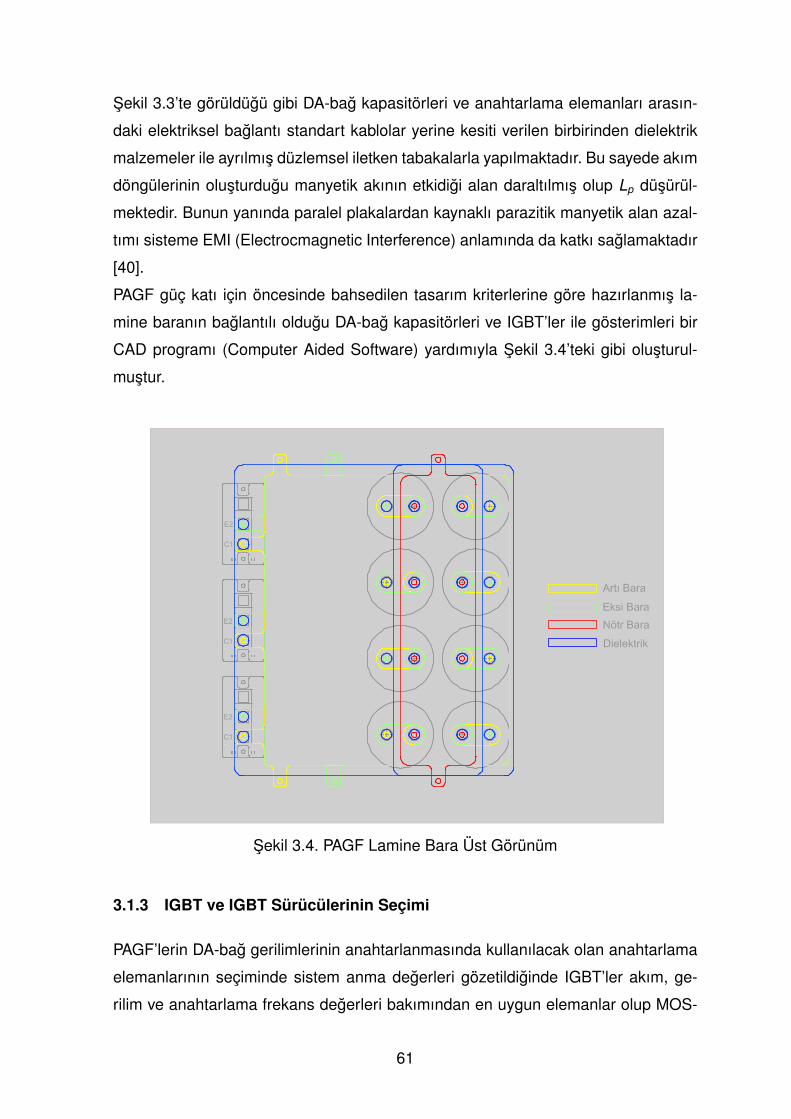
Sekil 3.3’te görüldügü gibi DA-bag kapasitörleri ve anahtarlama elemanları arasın-
daki elektriksel baglantı standart kablolar yerine kesiti verilen birbirinden dielektrik
malzemeler ile ayrılmıs düzlemsel iletken tabakalarla yapılmaktadır. Bu sayede akım
döngülerinin olusturdugu manyetik akının etkidigi alan daraltılmıs olup Lp düsürül-
mektedir. Bunun yanında paralel plakalardan kaynaklı parazitik manyetik alan azal-
tımı sisteme EMI (Electrocmagnetic Interference) anlamında da katkı saglamaktadır
[40].
PAGF güç katı için öncesinde bahsedilen tasarım kriterlerine göre hazırlanmıs la-
mine baranın baglantılı oldugu DA-bag kapasitörleri ve IGBT’ler ile gösterimleri bir
CAD programı (Computer Aided Software) yardımıyla Sekil 3.4’teki gibi olusturul-
mustur.
Sekil 3.4. PAGF Lamine Bara Üst Görünüm
3.1.3 IGBT ve IGBT Sürücülerinin Seçimi
PAGF’lerin DA-bag gerilimlerinin anahtarlanmasında kullanılacak olan anahtarlama
elemanlarının seçiminde sistem anma degerleri gözetildiginde IGBT’ler akım, ge-
rilim ve anahtarlama frekans degerleri bakımından en uygun elemanlar olup MOS-
61
FET, IGCT gibi ürünler sistem ihtiyaçlarıyla örtüsen özelliklere sahip olmadıklarından
tercih edilmemislerdir.
Öncelikle PAGF’nin DA-Bag gerilim seviyesi PAGF’nin baglanılacagı 3-Faz sebeke-
nin faz-faz gerilim tepe degerinden büyük olmak durumundadır. Bunun sebebi akım
kontrolünün ve yüksek frekans referans takibinin mümkün olması adına yeterli ge-
rilim payına sahip olma geregidir. Yüksek gerilim seviyeleri daha iyi kontrol olanagı
saglarken akım dalgacıgını ve kayıpları arttırmakta, bu yüzden genel olarak PAGF
uygulamalarında DA-bag 650V-750V ile sınırlanmaktadır. Bu degerler aynı zamanda
IGBT’nin maruz kalacagı tepe gerilime karsılık gelip, DA-baranın sahip oldugu pa-
razitik indüktans (Lp) sebebiyle olusacak anlık yükselmeler de bu degerin üstüne
ekleneceginden belirli bir güvenlik payı ile belirlenmelidir. Bunun yanında IGBT’lerin
tasıyabilecegi maksimum akım degerleri de sistemin öncesinde belirlenen faz ba-
sına anma akım degerini (60A) karsılayabilmelidir. Bu tez kapsamında olusturulacak
sistemde anma akım, gerilim degerlerini 1200V/150A olan ve piyasadan kolay temin
edilebilir IGBT modülleri kullanımıstır.
Belirlenen IGBT modüllerinin sistem güç katına entegrasyonu ve ana kontrolcüden
gelen anahtarlama sinyallerinin aktarımını saglamak adına IGBT’lere ek olarak IGBT
sürücü devrelere ihtiyaç duyulmaktadır. IGBT sürücüleri aynı potansiyele baglı ol-
mayan IGBT çiftlerini bir izolasyon trafosu yardımıyla izole diferansiyel gerilimler
elde edip IGBT’lerin VGE fiziksel açma-kapama gerilim seviyelerine dönüstürürler.
IGBT’ler ile entegre biçimde bulunabilmelerine karsın genelde maliyet avantajı se-
bebiyle dıs-modüller biçiminde temin edilmektedirler. IGBT sürücüleri bu temel is-
levlerinin yanında kısa devre koruması, ölü-bant (dead-band) üretimi gibi fonksiyon-
lara da sahip olabildiklerinden sistem tasarımında güvenlik ve basitlesme anlamıyla
katkı saglayabilmektedirler. Bu tez kapsamında belirlenen anahtarlama frekansında
(20kHZ) kullanılabilecek ve öncesinde bahsedilen fonksiyonlara sahip harici (exter-
nal) bir IGBT sürücüsü kullanılmıstır.
Bunların yanında IGBT’lerin iletim ve diyot kayıpları nedeniyle olusan ısıyı bir ısıl
materyal yoluyla genis bir sogutucu yüzeye aktarmalıdırlar. Sogutucular evirgecin
güç kaybına göre pasif veya aktif hava sogutmalı olarak seçilebilirler. Çogu durumda
prototip olusturulmaksızın ihtiyaç duyulacak sogutucu büyüklügü analitik olarak be-
lirlenememekle beraber gelistirilen prototipte sistem benzetim çalısması veri alına-
62
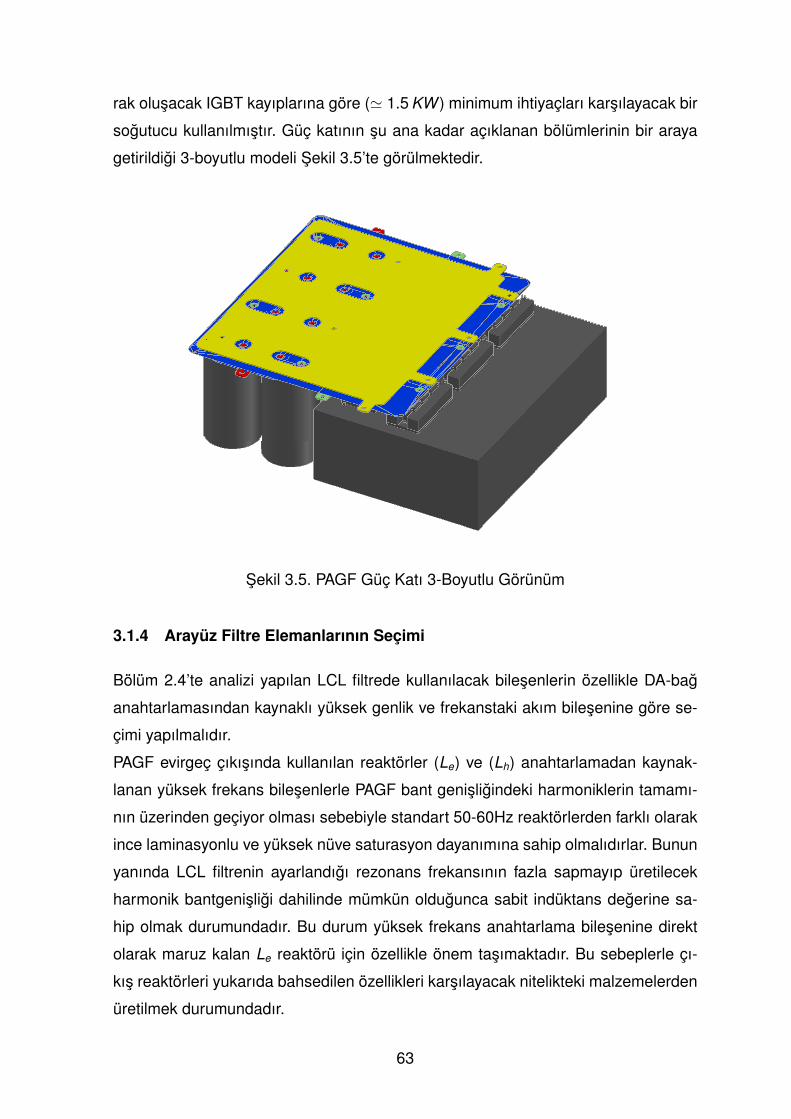
rak olusacak IGBT kayıplarına göre (' 1.5 KW ) minimum ihtiyaçları karsılayacak bir
sogutucu kullanılmıstır. Güç katının su ana kadar açıklanan bölümlerinin bir araya
getirildigi 3-boyutlu modeli Sekil 3.5’te görülmektedir.
Sekil 3.5. PAGF Güç Katı 3-Boyutlu Görünüm
3.1.4 Arayüz Filtre Elemanlarının Seçimi
Bölüm 2.4’te analizi yapılan LCL filtrede kullanılacak bilesenlerin özellikle DA-bag
anahtarlamasından kaynaklı yüksek genlik ve frekanstaki akım bilesenine göre se-
çimi yapılmalıdır.
PAGF evirgeç çıkısında kullanılan reaktörler (Le) ve (Lh) anahtarlamadan kaynak-
lanan yüksek frekans bilesenlerle PAGF bant genisligindeki harmoniklerin tamamı-
nın üzerinden geçiyor olması sebebiyle standart 50-60Hz reaktörlerden farklı olarak
ince laminasyonlu ve yüksek nüve saturasyon dayanımına sahip olmalıdırlar. Bunun
yanında LCL filtrenin ayarlandıgı rezonans frekansının fazla sapmayıp üretilecek
harmonik bantgenisligi dahilinde mümkün oldugunca sabit indüktans degerine sa-
hip olmak durumundadır. Bu durum yüksek frekans anahtarlama bilesenine direkt
olarak maruz kalan Le reaktörü için özellikle önem tasımaktadır. Bu sebeplerle çı-
kıs reaktörleri yukarıda bahsedilen özellikleri karsılayacak nitelikteki malzemelerden
üretilmek durumundadır.
63
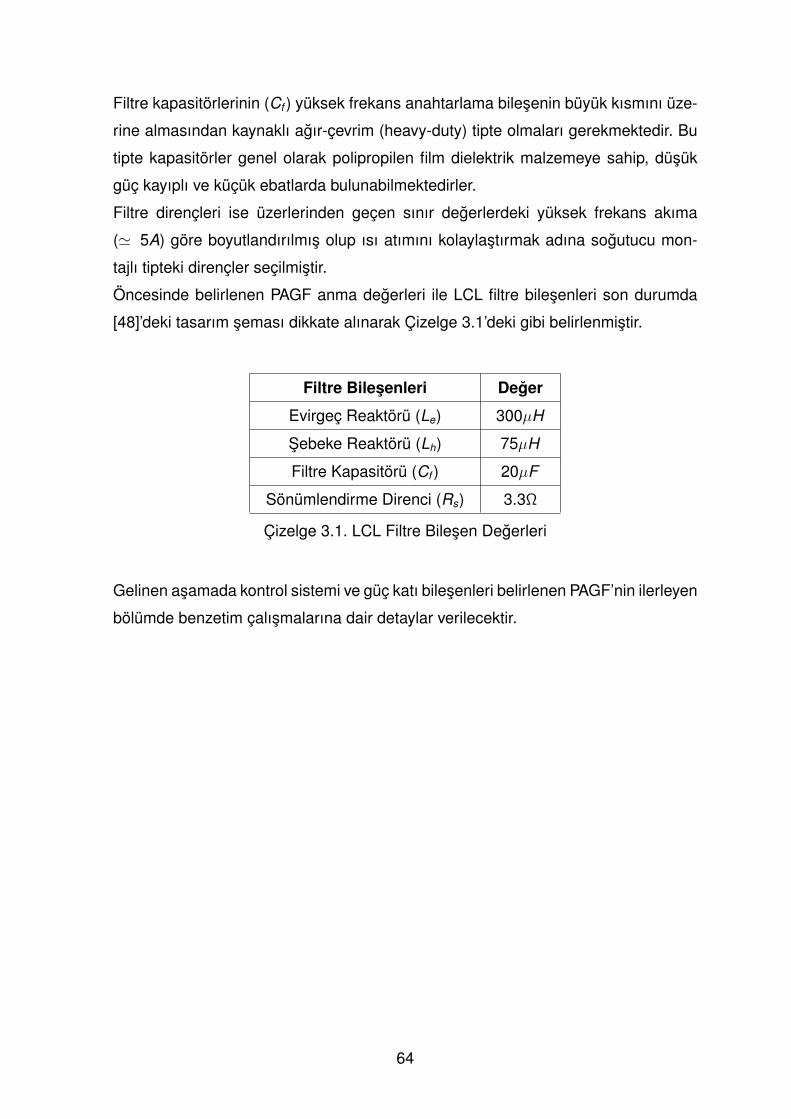
Filtre kapasitörlerinin (Cf ) yüksek frekans anahtarlama bilesenin büyük kısmını üze-
rine almasından kaynaklı agır-çevrim (heavy-duty) tipte olmaları gerekmektedir. Bu
tipte kapasitörler genel olarak polipropilen film dielektrik malzemeye sahip, düsük
güç kayıplı ve küçük ebatlarda bulunabilmektedirler.
Filtre dirençleri ise üzerlerinden geçen sınır degerlerdeki yüksek frekans akıma
(' 5A) göre boyutlandırılmıs olup ısı atımını kolaylastırmak adına sogutucu mon-
tajlı tipteki dirençler seçilmistir.
Öncesinde belirlenen PAGF anma degerleri ile LCL filtre bilesenleri son durumda
[48]’deki tasarım seması dikkate alınarak Çizelge 3.1’deki gibi belirlenmistir.
Filtre Bilesenleri Deger
Evirgeç Reaktörü (Le) 300µH
Sebeke Reaktörü (Lh) 75µH
Filtre Kapasitörü (Cf ) 20µF
Sönümlendirme Direnci (Rs) 3.3Ω
Çizelge 3.1. LCL Filtre Bilesen Degerleri
Gelinen asamada kontrol sistemi ve güç katı bilesenleri belirlenen PAGF’nin ilerleyen
bölümde benzetim çalısmalarına dair detaylar verilecektir.
64
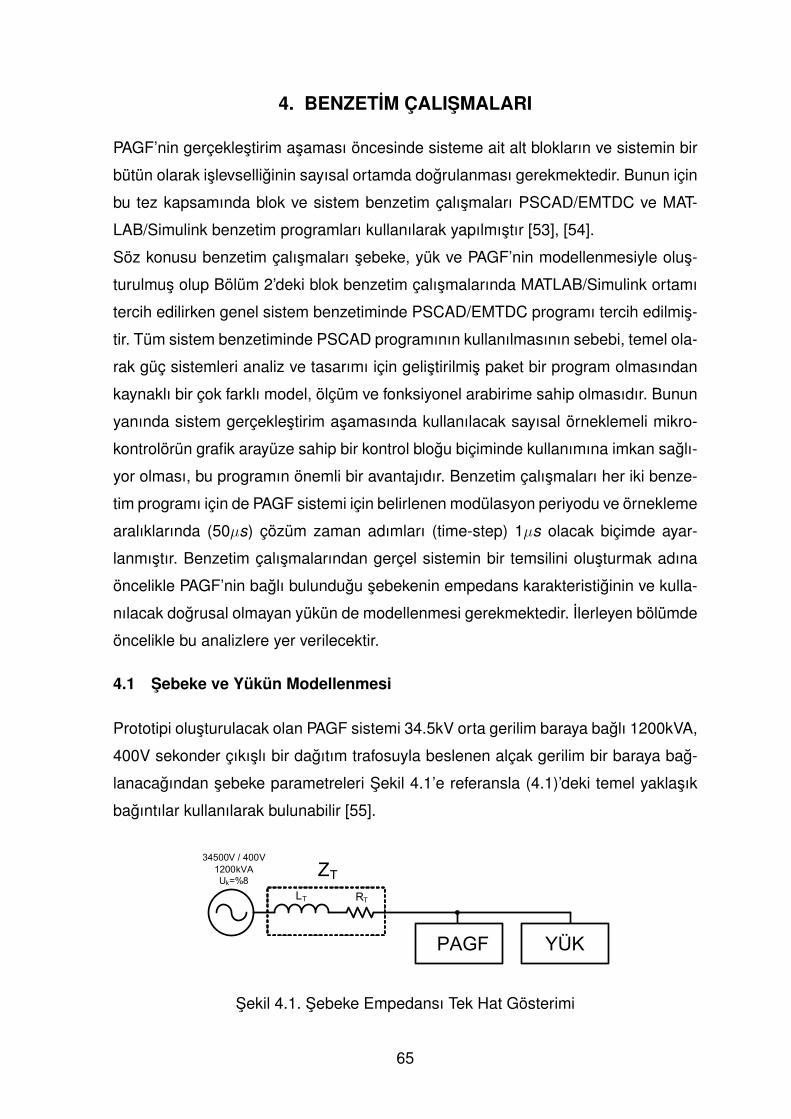
4. BENZETIM ÇALISMALARI
PAGF’nin gerçeklestirim asaması öncesinde sisteme ait alt blokların ve sistemin bir
bütün olarak islevselliginin sayısal ortamda dogrulanması gerekmektedir. Bunun için
bu tez kapsamında blok ve sistem benzetim çalısmaları PSCAD/EMTDC ve MAT-
LAB/Simulink benzetim programları kullanılarak yapılmıstır [53], [54].
Söz konusu benzetim çalısmaları sebeke, yük ve PAGF’nin modellenmesiyle olus-
turulmus olup Bölüm 2’deki blok benzetim çalısmalarında MATLAB/Simulink ortamı
tercih edilirken genel sistem benzetiminde PSCAD/EMTDC programı tercih edilmis-
tir. Tüm sistem benzetiminde PSCAD programının kullanılmasının sebebi, temel ola-
rak güç sistemleri analiz ve tasarımı için gelistirilmis paket bir program olmasından
kaynaklı bir çok farklı model, ölçüm ve fonksiyonel arabirime sahip olmasıdır. Bunun
yanında sistem gerçeklestirim asamasında kullanılacak sayısal örneklemeli mikro-
kontrolörün grafik arayüze sahip bir kontrol blogu biçiminde kullanımına imkan saglı-
yor olması, bu programın önemli bir avantajıdır. Benzetim çalısmaları her iki benze-
tim programı için de PAGF sistemi için belirlenen modülasyon periyodu ve örnekleme
aralıklarında (50µs) çözüm zaman adımları (time-step) 1µs olacak biçimde ayar-
lanmıstır. Benzetim çalısmalarından gerçel sistemin bir temsilini olusturmak adına
öncelikle PAGF’nin baglı bulundugu sebekenin empedans karakteristiginin ve kulla-
nılacak dogrusal olmayan yükün de modellenmesi gerekmektedir. Ilerleyen bölümde
öncelikle bu analizlere yer verilecektir.
4.1 Sebeke ve Yükün Modellenmesi
Prototipi olusturulacak olan PAGF sistemi 34.5kV orta gerilim baraya baglı 1200kVA,
400V sekonder çıkıslı bir dagıtım trafosuyla beslenen alçak gerilim bir baraya bag-
lanacagından sebeke parametreleri Sekil 4.1’e referansla (4.1)’deki temel yaklasık
bagıntılar kullanılarak bulunabilir [55].
ZT
RTLT
YÜKPAGF
34500V / 400V1200kVAUk=%8
Sekil 4.1. Sebeke Empedansı Tek Hat Gösterimi
65
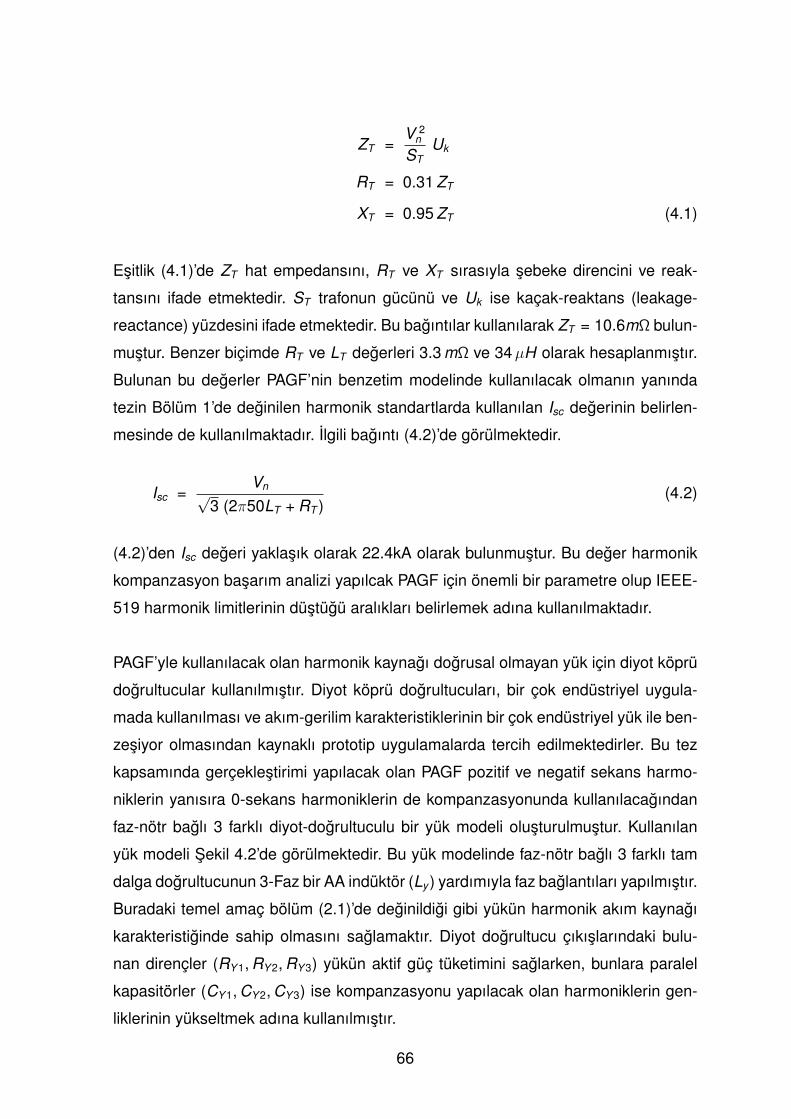
ZT =V 2
n
STUk
RT = 0.31 ZT
XT = 0.95 ZT (4.1)
Esitlik (4.1)’de ZT hat empedansını, RT ve XT sırasıyla sebeke direncini ve reak-
tansını ifade etmektedir. ST trafonun gücünü ve Uk ise kaçak-reaktans (leakage-
reactance) yüzdesini ifade etmektedir. Bu bagıntılar kullanılarak ZT = 10.6mΩ bulun-
mustur. Benzer biçimde RT ve LT degerleri 3.3 mΩ ve 34µH olarak hesaplanmıstır.
Bulunan bu degerler PAGF’nin benzetim modelinde kullanılacak olmanın yanında
tezin Bölüm 1’de deginilen harmonik standartlarda kullanılan Isc degerinin belirlen-
mesinde de kullanılmaktadır. Ilgili bagıntı (4.2)’de görülmektedir.
Isc =Vn√
3 (2π50LT + RT )(4.2)
(4.2)’den Isc degeri yaklasık olarak 22.4kA olarak bulunmustur. Bu deger harmonik
kompanzasyon basarım analizi yapılcak PAGF için önemli bir parametre olup IEEE-
519 harmonik limitlerinin düstügü aralıkları belirlemek adına kullanılmaktadır.
PAGF’yle kullanılacak olan harmonik kaynagı dogrusal olmayan yük için diyot köprü
dogrultucular kullanılmıstır. Diyot köprü dogrultucuları, bir çok endüstriyel uygula-
mada kullanılması ve akım-gerilim karakteristiklerinin bir çok endüstriyel yük ile ben-
zesiyor olmasından kaynaklı prototip uygulamalarda tercih edilmektedirler. Bu tez
kapsamında gerçeklestirimi yapılacak olan PAGF pozitif ve negatif sekans harmo-
niklerin yanısıra 0-sekans harmoniklerin de kompanzasyonunda kullanılacagından
faz-nötr baglı 3 farklı diyot-dogrultuculu bir yük modeli olusturulmustur. Kullanılan
yük modeli Sekil 4.2’de görülmektedir. Bu yük modelinde faz-nötr baglı 3 farklı tam
dalga dogrultucunun 3-Faz bir AA indüktör (Ly ) yardımıyla faz baglantıları yapılmıstır.
Buradaki temel amaç bölüm (2.1)’de deginildigi gibi yükün harmonik akım kaynagı
karakteristiginde sahip olmasını saglamaktır. Diyot dogrultucu çıkıslarındaki bulu-
nan dirençler (RY 1, RY 2, RY 3) yükün aktif güç tüketimini saglarken, bunlara paralel
kapasitörler (CY 1, CY 2, CY3) ise kompanzasyonu yapılacak olan harmoniklerin gen-
liklerinin yükseltmek adına kullanılmıstır.
66
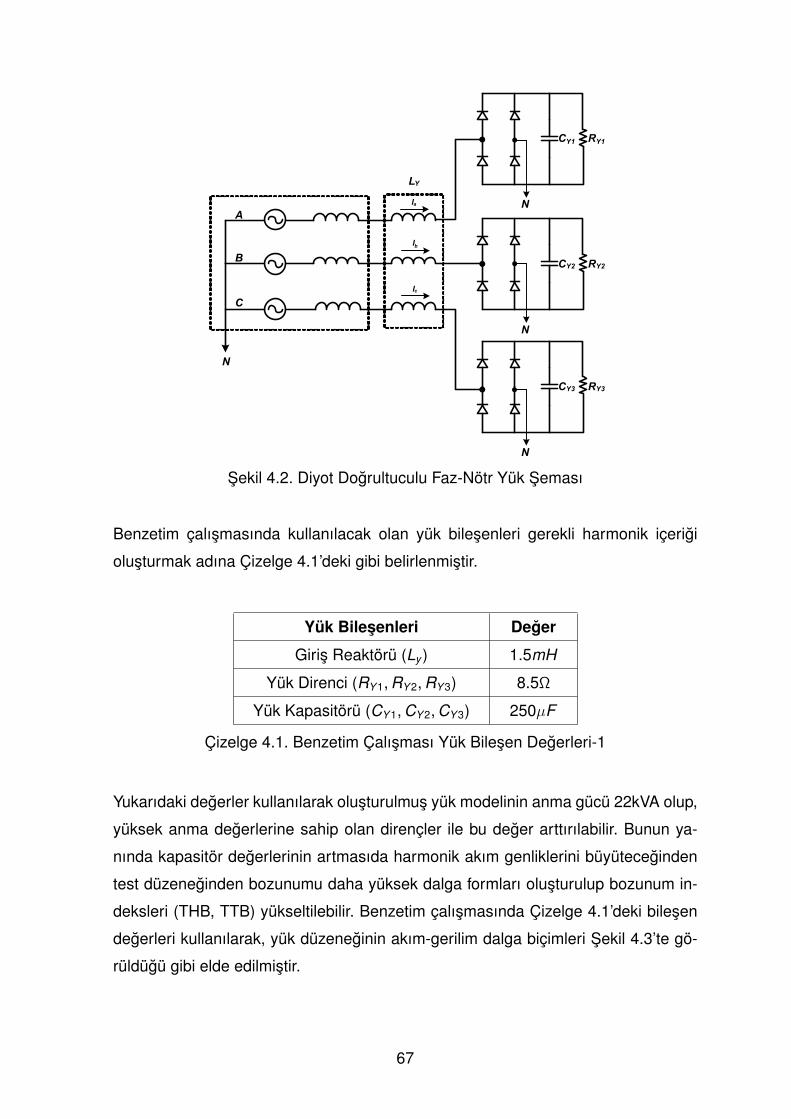
N
N
RY2CY2
N
RY1CY1
LY
N
RY3CY3
A
B
C
Ia
Ib
Ic
Sekil 4.2. Diyot Dogrultuculu Faz-Nötr Yük Seması
Benzetim çalısmasında kullanılacak olan yük bilesenleri gerekli harmonik içerigi
olusturmak adına Çizelge 4.1’deki gibi belirlenmistir.
Yük Bilesenleri Deger
Giris Reaktörü (Ly ) 1.5mH
Yük Direnci (RY1, RY 2, RY 3) 8.5Ω
Yük Kapasitörü (CY 1, CY 2, CY3) 250µF
Çizelge 4.1. Benzetim Çalısması Yük Bilesen Degerleri-1
Yukarıdaki degerler kullanılarak olusturulmus yük modelinin anma gücü 22kVA olup,
yüksek anma degerlerine sahip olan dirençler ile bu deger arttırılabilir. Bunun ya-
nında kapasitör degerlerinin artmasıda harmonik akım genliklerini büyüteceginden
test düzeneginden bozunumu daha yüksek dalga formları olusturulup bozunum in-
deksleri (THB, TTB) yükseltilebilir. Benzetim çalısmasında Çizelge 4.1’deki bilesen
degerleri kullanılarak, yük düzeneginin akım-gerilim dalga biçimleri Sekil 4.3’te gö-
rüldügü gibi elde edilmistir.
67
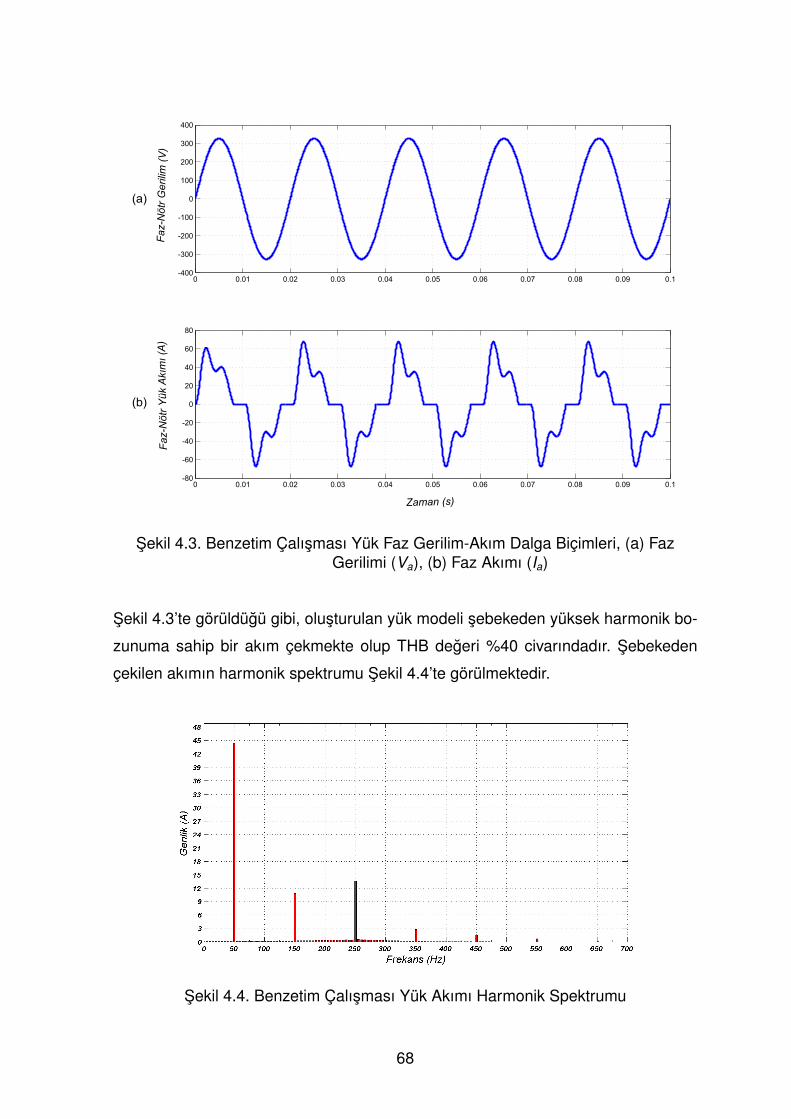
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-400
-300
-200
-100
0
100
200
300
400
Fa
z-N
ötr
Ge
rilim
(V
)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-80
-60
-40
-20
0
20
40
60
80
Fa
z-N
ötr
Yü
k A
kımı (A
)
(a)
(b)
Zaman (s)
Sekil 4.3. Benzetim Çalısması Yük Faz Gerilim-Akım Dalga Biçimleri, (a) FazGerilimi (Va), (b) Faz Akımı (Ia)
Sekil 4.3’te görüldügü gibi, olusturulan yük modeli sebekeden yüksek harmonik bo-
zunuma sahip bir akım çekmekte olup THB degeri %40 civarındadır. Sebekeden
çekilen akımın harmonik spektrumu Sekil 4.4’te görülmektedir.
Sekil 4.4. Benzetim Çalısması Yük Akımı Harmonik Spektrumu
68
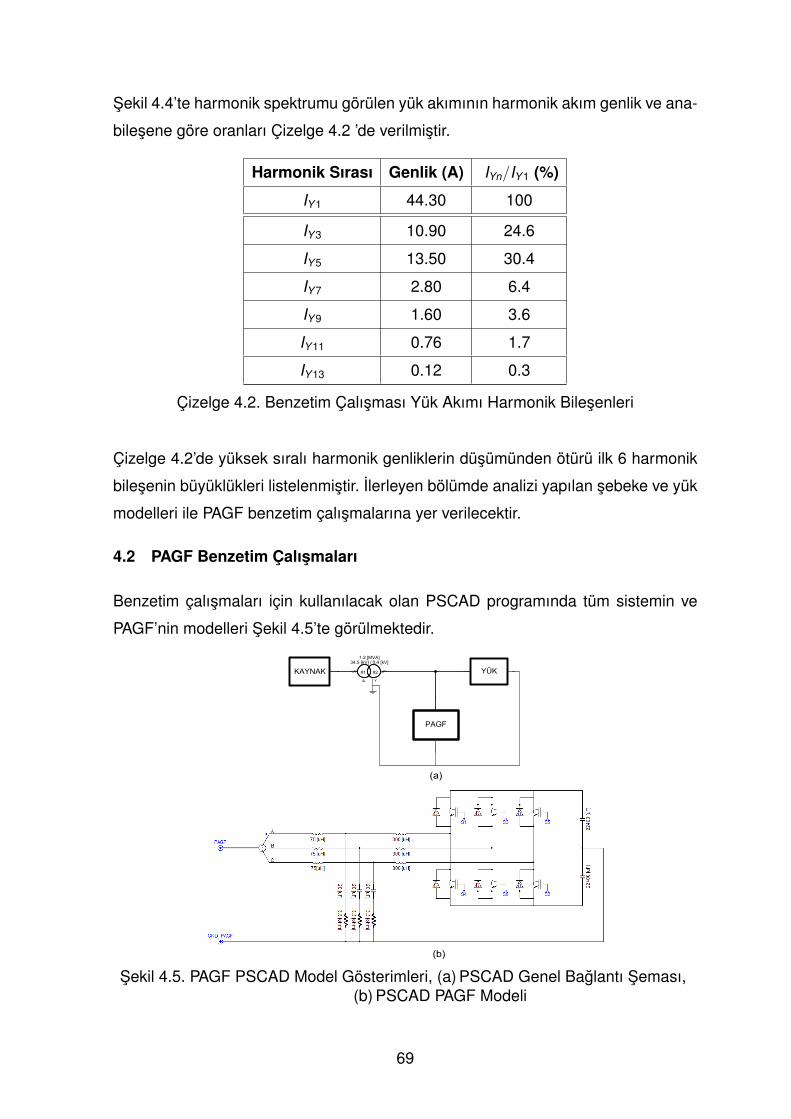
Sekil 4.4’te harmonik spektrumu görülen yük akımının harmonik akım genlik ve ana-
bilesene göre oranları Çizelge 4.2 ’de verilmistir.
Harmonik Sırası Genlik (A) IYn/IY1 (%)
IY 1 44.30 100
IY 3 10.90 24.6
IY 5 13.50 30.4
IY 7 2.80 6.4
IY 9 1.60 3.6
IY 11 0.76 1.7
IY 13 0.12 0.3
Çizelge 4.2. Benzetim Çalısması Yük Akımı Harmonik Bilesenleri
Çizelge 4.2’de yüksek sıralı harmonik genliklerin düsümünden ötürü ilk 6 harmonik
bilesenin büyüklükleri listelenmistir. Ilerleyen bölümde analizi yapılan sebeke ve yük
modelleri ile PAGF benzetim çalısmalarına yer verilecektir.
4.2 PAGF Benzetim Çalısmaları
Benzetim çalısmaları için kullanılacak olan PSCAD programında tüm sistemin ve
PAGF’nin modelleri Sekil 4.5’te görülmektedir.
(a)
(b)
YÜK
PAGF
#1 #2
1.2 [MVA]34.5 [kV] / 0.4 [kV]
KAYNAK
Sekil 4.5. PAGF PSCAD Model Gösterimleri, (a) PSCAD Genel Baglantı Seması,(b) PSCAD PAGF Modeli
69
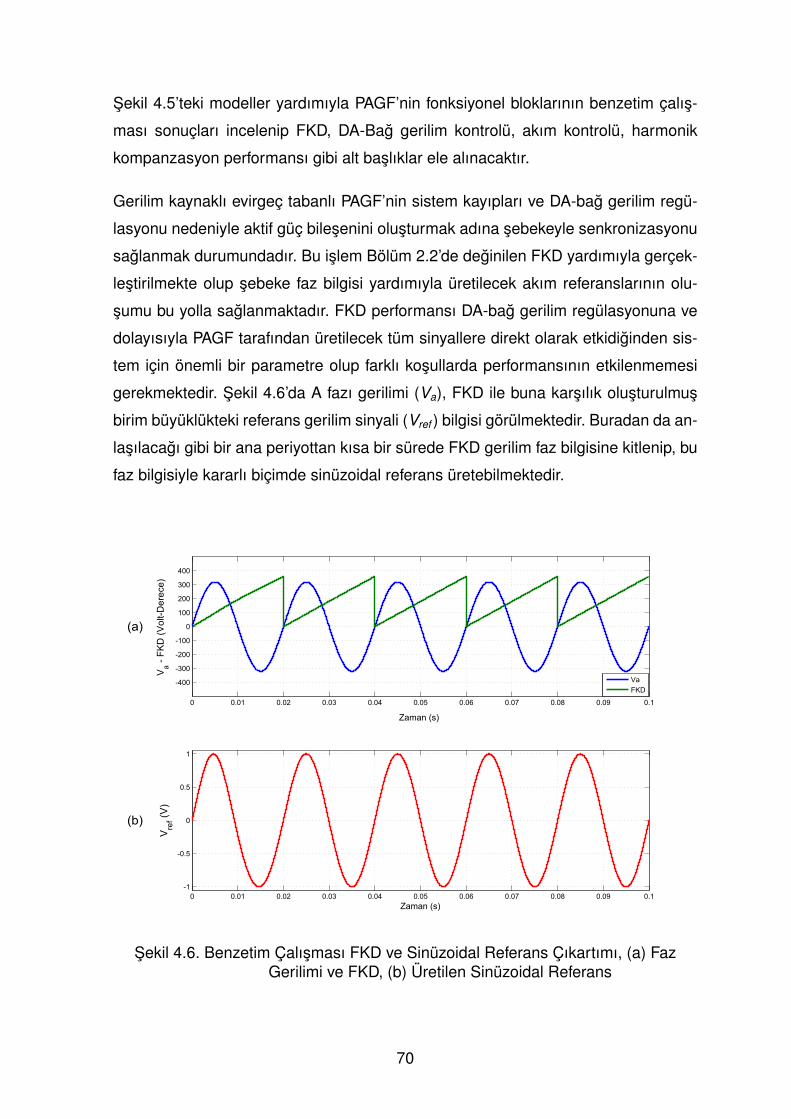
Sekil 4.5’teki modeller yardımıyla PAGF’nin fonksiyonel bloklarının benzetim çalıs-
ması sonuçları incelenip FKD, DA-Bag gerilim kontrolü, akım kontrolü, harmonik
kompanzasyon performansı gibi alt baslıklar ele alınacaktır.
Gerilim kaynaklı evirgeç tabanlı PAGF’nin sistem kayıpları ve DA-bag gerilim regü-
lasyonu nedeniyle aktif güç bilesenini olusturmak adına sebekeyle senkronizasyonu
saglanmak durumundadır. Bu islem Bölüm 2.2’de deginilen FKD yardımıyla gerçek-
lestirilmekte olup sebeke faz bilgisi yardımıyla üretilecek akım referanslarının olu-
sumu bu yolla saglanmaktadır. FKD performansı DA-bag gerilim regülasyonuna ve
dolayısıyla PAGF tarafından üretilecek tüm sinyallere direkt olarak etkidiginden sis-
tem için önemli bir parametre olup farklı kosullarda performansının etkilenmemesi
gerekmektedir. Sekil 4.6’da A fazı gerilimi (Va), FKD ile buna karsılık olusturulmus
birim büyüklükteki referans gerilim sinyali (Vref ) bilgisi görülmektedir. Buradan da an-
lasılacagı gibi bir ana periyottan kısa bir sürede FKD gerilim faz bilgisine kitlenip, bu
faz bilgisiyle kararlı biçimde sinüzoidal referans üretebilmektedir.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
-400
-300
-200
-100
0
100
200
300
400
Zamanb(s)
Va
-bF
KD
b(V
olt-
Der
ece)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-1
-0.5
0
0.5
1
Zamanb(s)
Vre
f(V
)
Va
FKD
(a)
(b)
Sekil 4.6. Benzetim Çalısması FKD ve Sinüzoidal Referans Çıkartımı, (a) FazGerilimi ve FKD, (b) Üretilen Sinüzoidal Referans
70
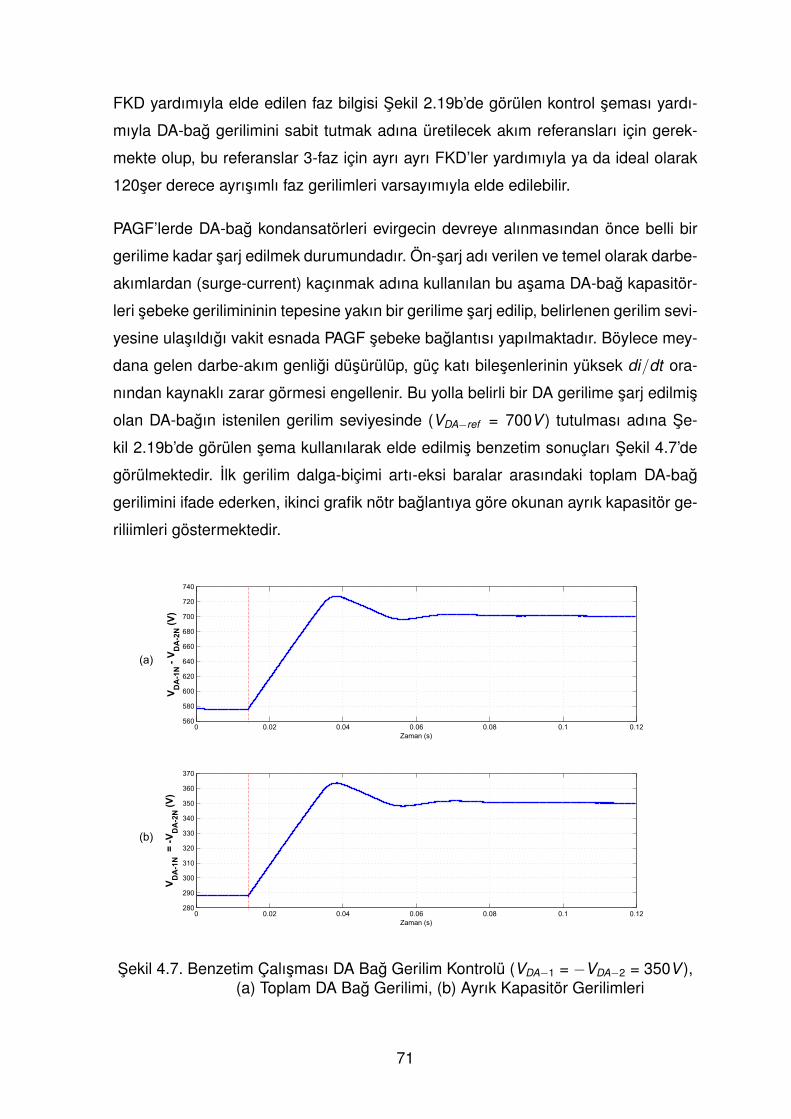
FKD yardımıyla elde edilen faz bilgisi Sekil 2.19b’de görülen kontrol seması yardı-
mıyla DA-bag gerilimini sabit tutmak adına üretilecek akım referansları için gerek-
mekte olup, bu referanslar 3-faz için ayrı ayrı FKD’ler yardımıyla ya da ideal olarak
120ser derece ayrısımlı faz gerilimleri varsayımıyla elde edilebilir.
PAGF’lerde DA-bag kondansatörleri evirgecin devreye alınmasından önce belli bir
gerilime kadar sarj edilmek durumundadır. Ön-sarj adı verilen ve temel olarak darbe-
akımlardan (surge-current) kaçınmak adına kullanılan bu asama DA-bag kapasitör-
leri sebeke gerilimininin tepesine yakın bir gerilime sarj edilip, belirlenen gerilim sevi-
yesine ulasıldıgı vakit esnada PAGF sebeke baglantısı yapılmaktadır. Böylece mey-
dana gelen darbe-akım genligi düsürülüp, güç katı bilesenlerinin yüksek di/dt ora-
nından kaynaklı zarar görmesi engellenir. Bu yolla belirli bir DA gerilime sarj edilmis
olan DA-bagın istenilen gerilim seviyesinde (VDA−ref = 700V ) tutulması adına Se-
kil 2.19b’de görülen sema kullanılarak elde edilmis benzetim sonuçları Sekil 4.7’de
görülmektedir. Ilk gerilim dalga-biçimi artı-eksi baralar arasındaki toplam DA-bag
gerilimini ifade ederken, ikinci grafik nötr baglantıya göre okunan ayrık kapasitör ge-
riliimleri göstermektedir.
0 0.02 0.04 0.06 0.08 0.1 0.12560
580
600
620
640
660
680
700
720
740
Zaman (s)
VD
A-1
N-
VD
A-2
N(V
)
0 0.02 0.04 0.06 0.08 0.1 0.12280
290
300
310
320
330
340
350
360
370
Zaman (s)
VD
A-1
N=
-V
DA
-2N
(V)
(a)
(b)
Sekil 4.7. Benzetim Çalısması DA Bag Gerilim Kontrolü (VDA−1 = −VDA−2 = 350V ),(a) Toplam DA Bag Gerilimi, (b) Ayrık Kapasitör Gerilimleri
71
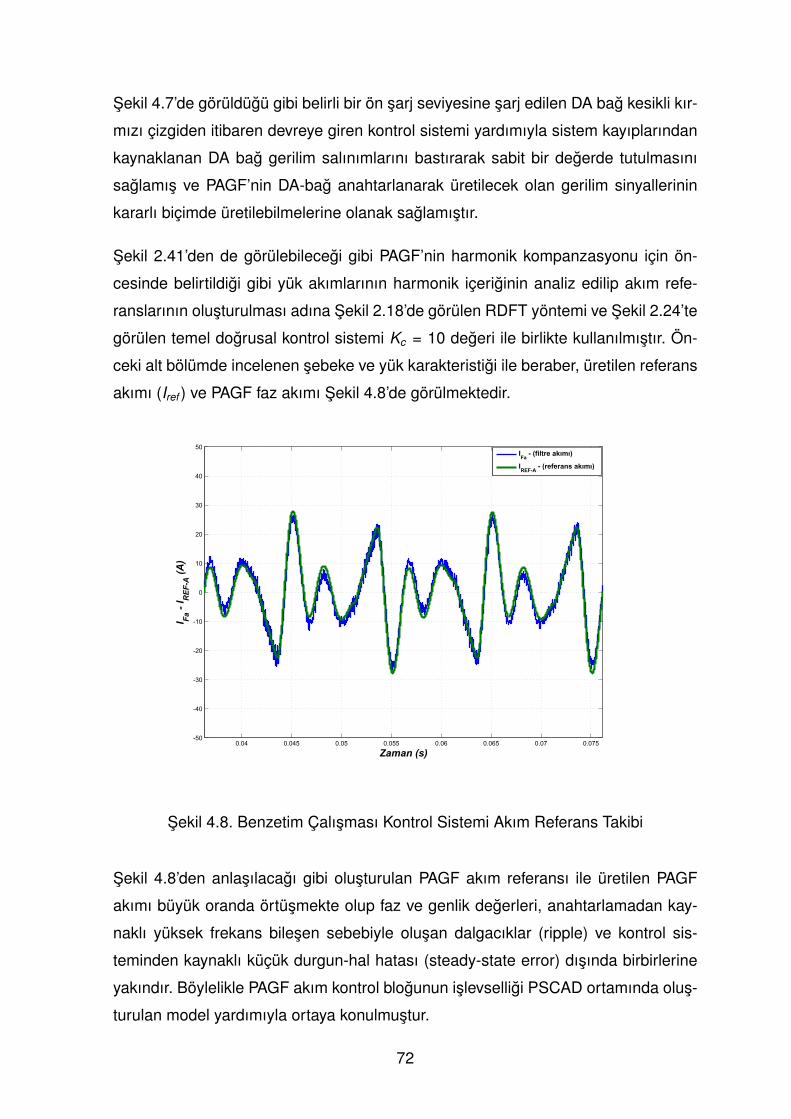
Sekil 4.7’de görüldügü gibi belirli bir ön sarj seviyesine sarj edilen DA bag kesikli kır-
mızı çizgiden itibaren devreye giren kontrol sistemi yardımıyla sistem kayıplarından
kaynaklanan DA bag gerilim salınımlarını bastırarak sabit bir degerde tutulmasını
saglamıs ve PAGF’nin DA-bag anahtarlanarak üretilecek olan gerilim sinyallerinin
kararlı biçimde üretilebilmelerine olanak saglamıstır.
Sekil 2.41’den de görülebilecegi gibi PAGF’nin harmonik kompanzasyonu için ön-
cesinde belirtildigi gibi yük akımlarının harmonik içeriginin analiz edilip akım refe-
ranslarının olusturulması adına Sekil 2.18’de görülen RDFT yöntemi ve Sekil 2.24’te
görülen temel dogrusal kontrol sistemi Kc = 10 degeri ile birlikte kullanılmıstır. Ön-
ceki alt bölümde incelenen sebeke ve yük karakteristigi ile beraber, üretilen referans
akımı (Iref ) ve PAGF faz akımı Sekil 4.8’de görülmektedir.
0.04 0.045 0.05 0.055 0.06 0.065 0.07 0.075-50
-40
-30
-20
-10
0
10
20
30
40
50
Zaman (s)
I Fa - IREF-A (A)
IFa - (filtre akımı)
IREF-A
- (referans akımı)
Sekil 4.8. Benzetim Çalısması Kontrol Sistemi Akım Referans Takibi
Sekil 4.8’den anlasılacagı gibi olusturulan PAGF akım referansı ile üretilen PAGF
akımı büyük oranda örtüsmekte olup faz ve genlik degerleri, anahtarlamadan kay-
naklı yüksek frekans bilesen sebebiyle olusan dalgacıklar (ripple) ve kontrol sis-
teminden kaynaklı küçük durgun-hal hatası (steady-state error) dısında birbirlerine
yakındır. Böylelikle PAGF akım kontrol blogunun islevselligi PSCAD ortamında olus-
turulan model yardımıyla ortaya konulmustur.
72
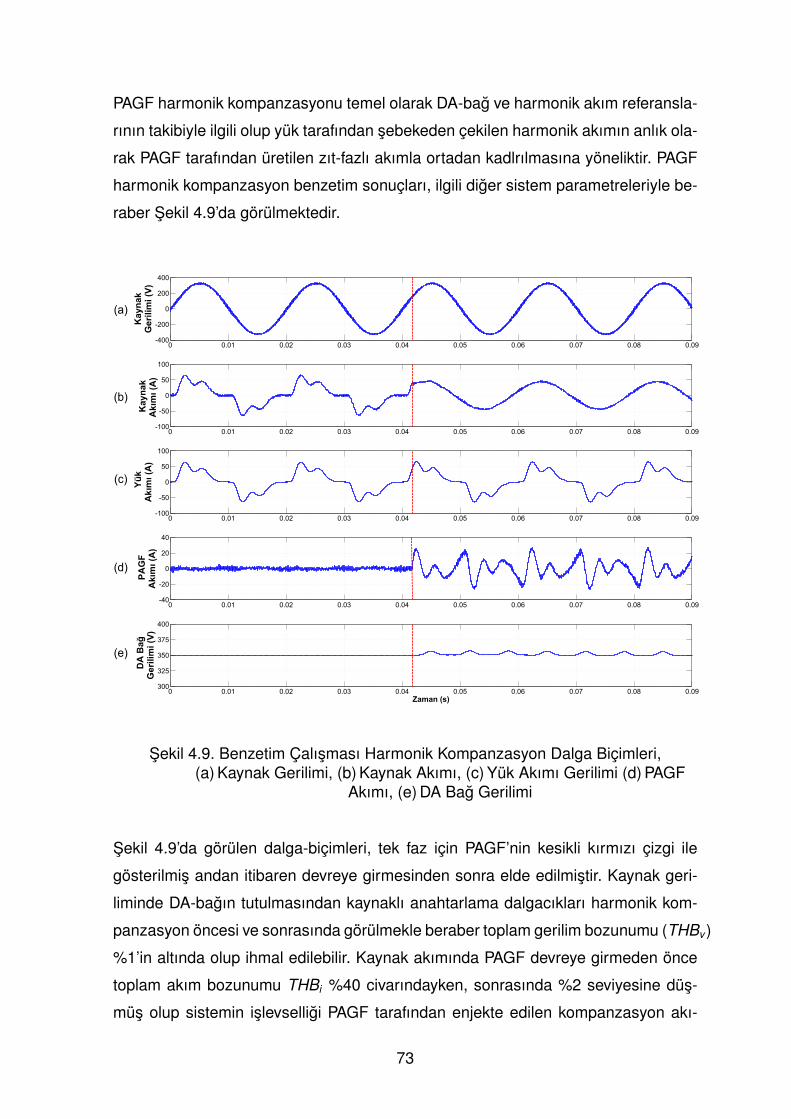
PAGF harmonik kompanzasyonu temel olarak DA-bag ve harmonik akım referansla-
rının takibiyle ilgili olup yük tarafından sebekeden çekilen harmonik akımın anlık ola-
rak PAGF tarafından üretilen zıt-fazlı akımla ortadan kadlrılmasına yöneliktir. PAGF
harmonik kompanzasyon benzetim sonuçları, ilgili diger sistem parametreleriyle be-
raber Sekil 4.9’da görülmektedir.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-400
-200
0
200
400
Kay
na
k G
erili
mi (
V)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-100
-50
0
50
100
Kay
na
kA
kımı (
A)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-100
-50
0
50
100
Yü
kA
kımı (
A)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-40
-20
0
20
40
PA
GF
A
kımı (
A)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09300
325
350
375
400
Zaman (s)
DA
Bağ
Ger
ilim
i (V
)
(a)
(b)
(c)
(d)
(e)
Sekil 4.9. Benzetim Çalısması Harmonik Kompanzasyon Dalga Biçimleri,(a) Kaynak Gerilimi, (b) Kaynak Akımı, (c) Yük Akımı Gerilimi (d) PAGF
Akımı, (e) DA Bag Gerilimi
Sekil 4.9’da görülen dalga-biçimleri, tek faz için PAGF’nin kesikli kırmızı çizgi ile
gösterilmis andan itibaren devreye girmesinden sonra elde edilmistir. Kaynak geri-
liminde DA-bagın tutulmasından kaynaklı anahtarlama dalgacıkları harmonik kom-
panzasyon öncesi ve sonrasında görülmekle beraber toplam gerilim bozunumu (THBv )
%1’in altında olup ihmal edilebilir. Kaynak akımında PAGF devreye girmeden önce
toplam akım bozunumu THBi %40 civarındayken, sonrasında %2 seviyesine düs-
müs olup sistemin islevselligi PAGF tarafından enjekte edilen kompanzasyon akı-
73
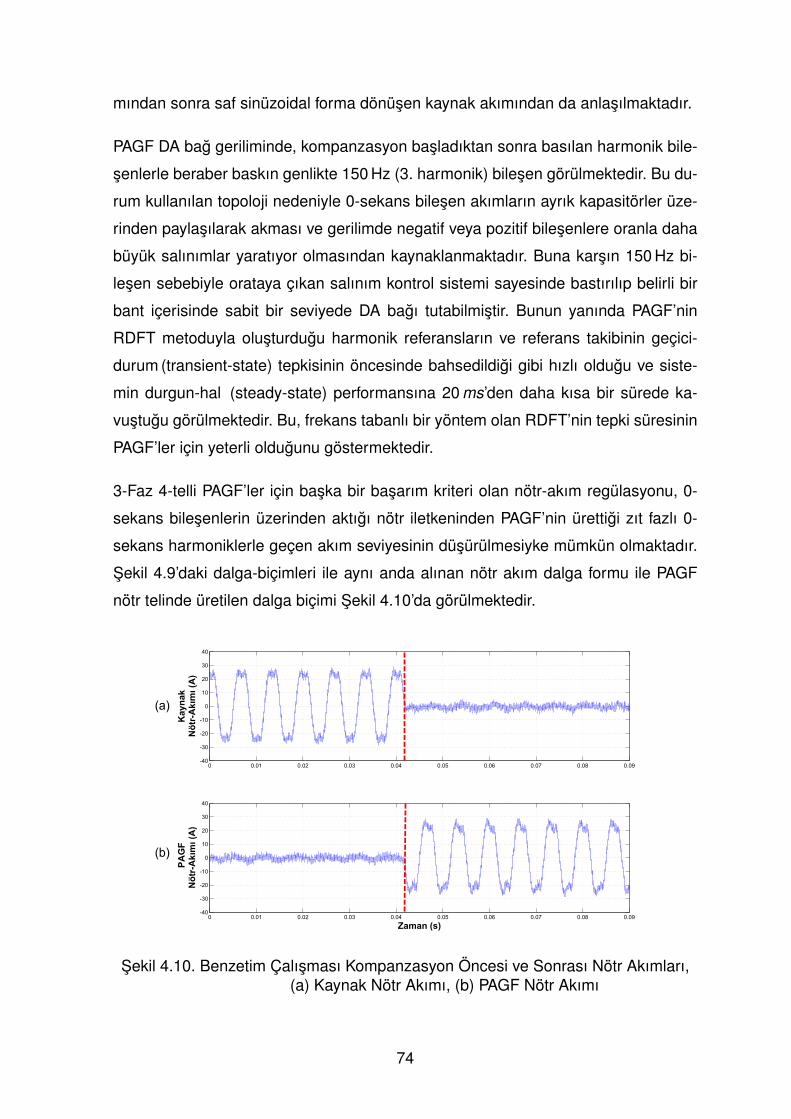
mından sonra saf sinüzoidal forma dönüsen kaynak akımından da anlasılmaktadır.
PAGF DA bag geriliminde, kompanzasyon basladıktan sonra basılan harmonik bile-
senlerle beraber baskın genlikte 150 Hz (3. harmonik) bilesen görülmektedir. Bu du-
rum kullanılan topoloji nedeniyle 0-sekans bilesen akımların ayrık kapasitörler üze-
rinden paylasılarak akması ve gerilimde negatif veya pozitif bilesenlere oranla daha
büyük salınımlar yaratıyor olmasından kaynaklanmaktadır. Buna karsın 150 Hz bi-
lesen sebebiyle orataya çıkan salınım kontrol sistemi sayesinde bastırılıp belirli bir
bant içerisinde sabit bir seviyede DA bagı tutabilmistir. Bunun yanında PAGF’nin
RDFT metoduyla olusturdugu harmonik referansların ve referans takibinin geçici-
durum (transient-state) tepkisinin öncesinde bahsedildigi gibi hızlı oldugu ve siste-
min durgun-hal (steady-state) performansına 20 ms’den daha kısa bir sürede ka-
vustugu görülmektedir. Bu, frekans tabanlı bir yöntem olan RDFT’nin tepki süresinin
PAGF’ler için yeterli oldugunu göstermektedir.
3-Faz 4-telli PAGF’ler için baska bir basarım kriteri olan nötr-akım regülasyonu, 0-
sekans bilesenlerin üzerinden aktıgı nötr iletkeninden PAGF’nin ürettigi zıt fazlı 0-
sekans harmoniklerle geçen akım seviyesinin düsürülmesiyke mümkün olmaktadır.
Sekil 4.9’daki dalga-biçimleri ile aynı anda alınan nötr akım dalga formu ile PAGF
nötr telinde üretilen dalga biçimi Sekil 4.10’da görülmektedir.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-40
-30
-20
-10
0
10
20
30
40
Kay
nak
Nö
tr-A
kımı (
A)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09-40
-30
-20
-10
0
10
20
30
40
Zaman (s)
PA
GF
Nö
tr-A
kımı (
A)
(a)
(b)
Sekil 4.10. Benzetim Çalısması Kompanzasyon Öncesi ve Sonrası Nötr Akımları,(a) Kaynak Nötr Akımı, (b) PAGF Nötr Akımı
74
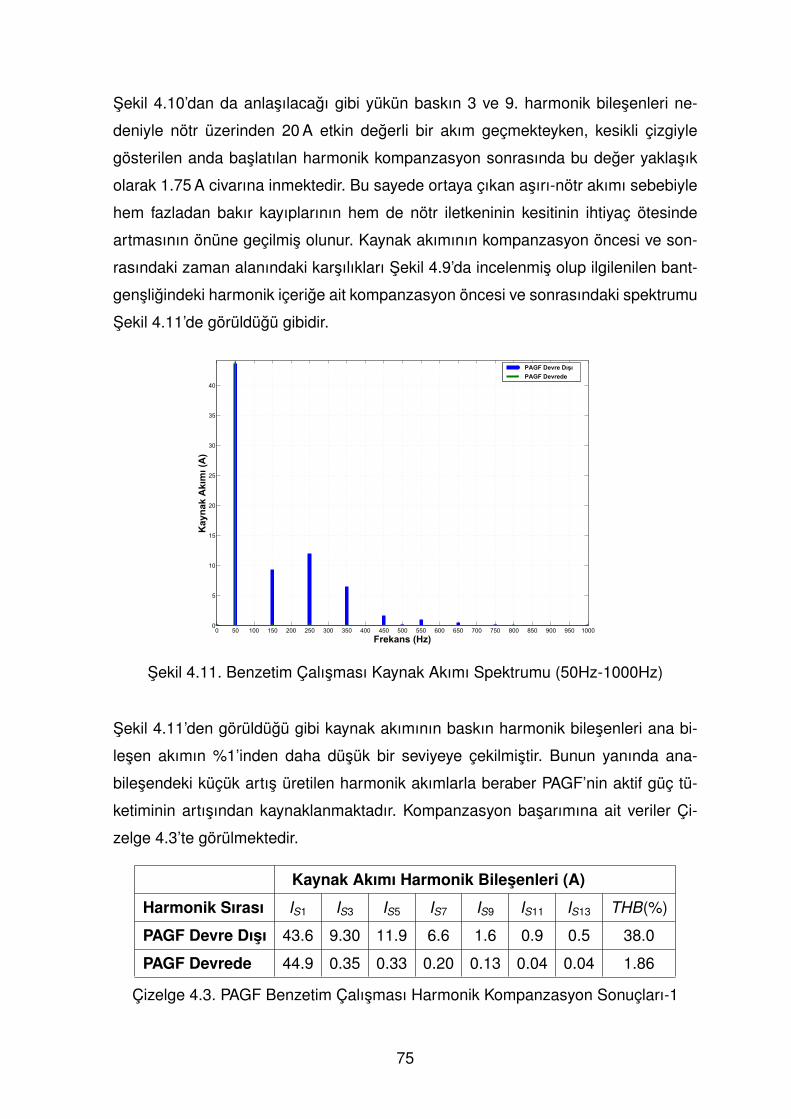
Sekil 4.10’dan da anlasılacagı gibi yükün baskın 3 ve 9. harmonik bilesenleri ne-
deniyle nötr üzerinden 20 A etkin degerli bir akım geçmekteyken, kesikli çizgiyle
gösterilen anda baslatılan harmonik kompanzasyon sonrasında bu deger yaklasık
olarak 1.75 A civarına inmektedir. Bu sayede ortaya çıkan asırı-nötr akımı sebebiyle
hem fazladan bakır kayıplarının hem de nötr iletkeninin kesitinin ihtiyaç ötesinde
artmasının önüne geçilmis olunur. Kaynak akımının kompanzasyon öncesi ve son-
rasındaki zaman alanındaki karsılıkları Sekil 4.9’da incelenmis olup ilgilenilen bant-
gensligindeki harmonik içerige ait kompanzasyon öncesi ve sonrasındaki spektrumu
Sekil 4.11’de görüldügü gibidir.
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800 850 900 950 10000
5
10
15
20
25
30
35
40
Frekans (Hz)
Ka
yn
ak
Ak
ımı
(A)
PAGF Devre Dışı
PAGF Devrede
Sekil 4.11. Benzetim Çalısması Kaynak Akımı Spektrumu (50Hz-1000Hz)
Sekil 4.11’den görüldügü gibi kaynak akımının baskın harmonik bilesenleri ana bi-
lesen akımın %1’inden daha düsük bir seviyeye çekilmistir. Bunun yanında ana-
bilesendeki küçük artıs üretilen harmonik akımlarla beraber PAGF’nin aktif güç tü-
ketiminin artısından kaynaklanmaktadır. Kompanzasyon basarımına ait veriler Çi-
zelge 4.3’te görülmektedir.
Kaynak Akımı Harmonik Bilesenleri (A)
Harmonik Sırası IS1 IS3 IS5 IS7 IS9 IS11 IS13 THB(%)
PAGF Devre Dısı 43.6 9.30 11.9 6.6 1.6 0.9 0.5 38.0
PAGF Devrede 44.9 0.35 0.33 0.20 0.13 0.04 0.04 1.86
Çizelge 4.3. PAGF Benzetim Çalısması Harmonik Kompanzasyon Sonuçları-1
75
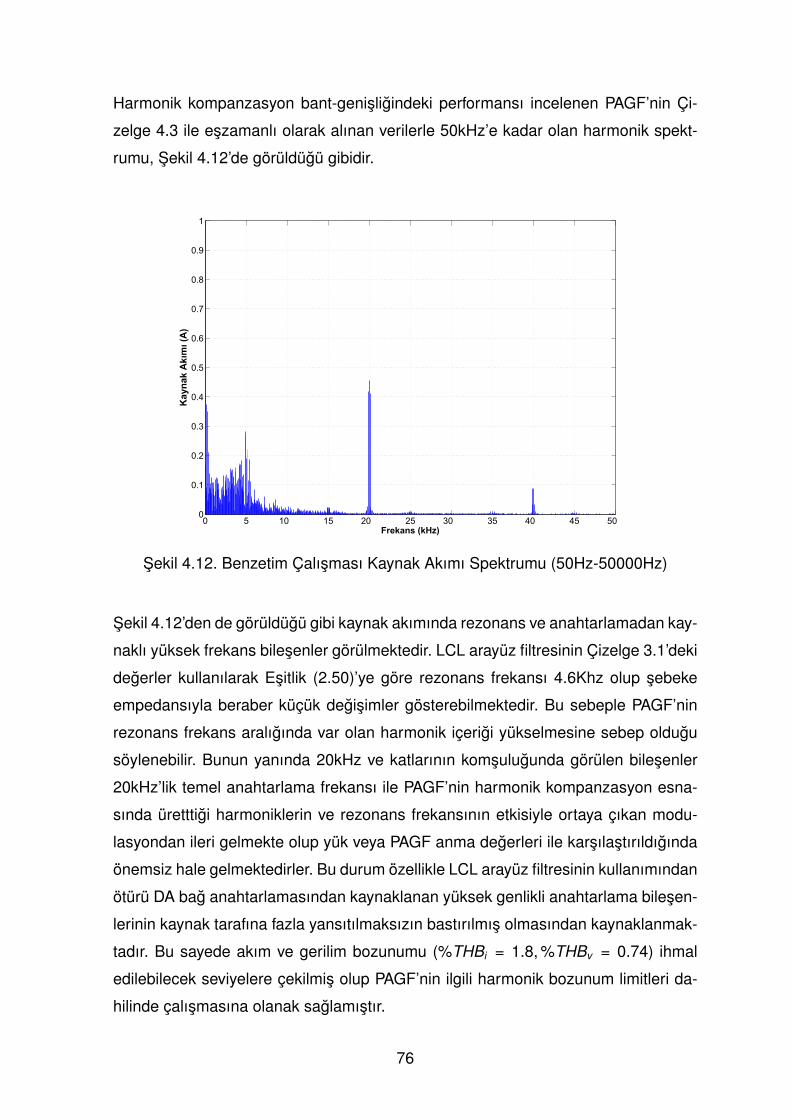
Harmonik kompanzasyon bant-genisligindeki performansı incelenen PAGF’nin Çi-
zelge 4.3 ile eszamanlı olarak alınan verilerle 50kHz’e kadar olan harmonik spekt-
rumu, Sekil 4.12’de görüldügü gibidir.
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frekans (kHz)
Kay
nak
Akı
mı (
A)
Sekil 4.12. Benzetim Çalısması Kaynak Akımı Spektrumu (50Hz-50000Hz)
Sekil 4.12’den de görüldügü gibi kaynak akımında rezonans ve anahtarlamadan kay-
naklı yüksek frekans bilesenler görülmektedir. LCL arayüz filtresinin Çizelge 3.1’deki
degerler kullanılarak Esitlik (2.50)’ye göre rezonans frekansı 4.6Khz olup sebeke
empedansıyla beraber küçük degisimler gösterebilmektedir. Bu sebeple PAGF’nin
rezonans frekans aralıgında var olan harmonik içerigi yükselmesine sebep oldugu
söylenebilir. Bunun yanında 20kHz ve katlarının komsulugunda görülen bilesenler
20kHz’lik temel anahtarlama frekansı ile PAGF’nin harmonik kompanzasyon esna-
sında üretttigi harmoniklerin ve rezonans frekansının etkisiyle ortaya çıkan modu-
lasyondan ileri gelmekte olup yük veya PAGF anma degerleri ile karsılastırıldıgında
önemsiz hale gelmektedirler. Bu durum özellikle LCL arayüz filtresinin kullanımından
ötürü DA bag anahtarlamasından kaynaklanan yüksek genlikli anahtarlama bilesen-
lerinin kaynak tarafına fazla yansıtılmaksızın bastırılmıs olmasından kaynaklanmak-
tadır. Bu sayede akım ve gerilim bozunumu (%THBi = 1.8, %THBv = 0.74) ihmal
edilebilecek seviyelere çekilmis olup PAGF’nin ilgili harmonik bozunum limitleri da-
hilinde çalısmasına olanak saglamıstır.
76

PAGF benzetim çalısmasında, hem farklı harmonik akım seviyelerine sahip yük-
lerdeki kompanzasyon performanslarını gözlemlemek hem de gerçeklestirim çalıs-
masında kullanılan kompanzasyon sonuçları ile bir karsılastırma yapmak adına Çi-
zelge 4.4’te görülen degerlerdeki degiskenleri içeren yük modeli ile alınan kompan-
zasyon öncesi ve sonrasındaki sonuçlar Çizelge 4.5’te listelenmistir.
Yük Bilesenleri Deger
Giris Reaktörü (Ly ) 1.5mH
Yük Direnci (RY 1, RY 2, RY3) 28Ω
Yük Kapasitörü (CY 1, CY 2, CY 3) 100µF
Çizelge 4.4. Benzetim Çalısması Yük Bilesen Degerleri-2
Kaynak Akımı Harmonik Bilesenleri (A)
Harmonik Sırası IS1 IS3 IS5 IS7 IS9 IS11 IS13 THB(%)
PAGF Devre Dısı 12.0 3.40 2.6 0.72 1.27 1.37 0.7 39.3
PAGF Devrede 12.9 0.13 0.03 0.03 0.04 0.04 0.06 2.36
Çizelge 4.5. PAGF Benzetim Çalısması Harmonik Kompanzasyon Sonuçları-2
4.3 Özet
Bu bölümde benzetim çalısmalarına yer verilen gerilim kaynaklı evirgeç tabanlı 3-
Faz 4-Telli PAGF’nin Bölüm 2 ve 3’te teorik analizi ile tasarım çalısmaları yapılan
temel fonksiyonel blokları ve güç katı elemanlarıyla entegrasyonu yapılmıs, sebeke
ve yük modelleri olusturulup sistemin benzetim modeli üzerinden bir bütün olarak
çalısırlıgı test edilmistir. Sistem basarım analizi için öncelikle DA bag ve akım kont-
rol bloklarının çıktıları incelenmis ve referans gerilim-akım degerlerinin kontrol sis-
temi tarafından beklenildigi gibi takibinin yapıldıgı görülmüstür. Bu asamadan sonra
modeli olusturulan sebeke ve yük bilesenleri ile PAGF’nin harmonik kompanzasyon
basarımı incelenip, geçici ve durgun hal tepkileri ile bu esnadaki sistem akım-gerilim
dalga biçimleri analiz edilmistir. PAGF’nin harmonik kompanzasyon ve nötr akım re-
gülasyon basarımı grafik araçlar ve nümerik verilerle dogrulanmıs kompanzasyon
öncesi ve sonrasındaki sistemin harmonik içerigi frekans ve zaman alanında kar-
sılastırılmıstır. Operasyon bant-genisligi ve tüm spektrum dahilinde harmonik içerik
incelenmis olup ortaya çıkan yüksek frekans bilesenlerin sebepleri ortaya konmus-
tur. Sonuç olarak sistemin benzetim modeli dahilinde IEEE-519 harmonik bozunum
77

limitlerini asan dogrusal olmayan yükü bu limitleri saglayacak biçimde kompanze et-
tigi görülüp kompanzasyon basarımı dogrulanmıstır. Bunun yanında farklı harmonik
akım seviyelerine ve gerçeklestirim çalısmasında kullanılacak olan yük bilesenle-
rine yakın degerlere sahip bir yük modelinin de kompanzasyon sonuçları karsılas-
tırma yapabilmek adına alınmıstır. Ilerleyen bölümde sistem gerçeklestirim asama-
sına dair detaylar verilip sistem basarımı deneysel verilerle dogrulanmaya çalısıla-
caktır.
78
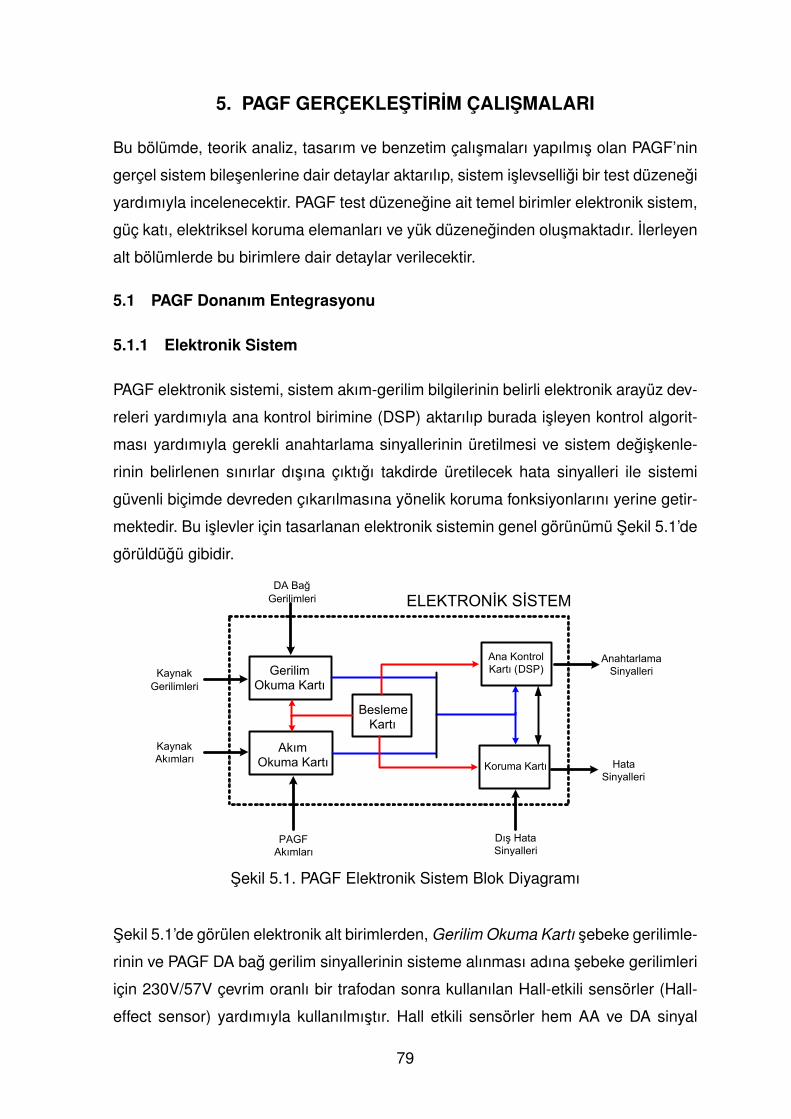
5. PAGF GERÇEKLESTIRIM ÇALISMALARI
Bu bölümde, teorik analiz, tasarım ve benzetim çalısmaları yapılmıs olan PAGF’nin
gerçel sistem bilesenlerine dair detaylar aktarılıp, sistem islevselligi bir test düzenegi
yardımıyla incelenecektir. PAGF test düzenegine ait temel birimler elektronik sistem,
güç katı, elektriksel koruma elemanları ve yük düzeneginden olusmaktadır. Ilerleyen
alt bölümlerde bu birimlere dair detaylar verilecektir.
5.1 PAGF Donanım Entegrasyonu
5.1.1 Elektronik Sistem
PAGF elektronik sistemi, sistem akım-gerilim bilgilerinin belirli elektronik arayüz dev-
releri yardımıyla ana kontrol birimine (DSP) aktarılıp burada isleyen kontrol algorit-
ması yardımıyla gerekli anahtarlama sinyallerinin üretilmesi ve sistem degiskenle-
rinin belirlenen sınırlar dısına çıktıgı takdirde üretilecek hata sinyalleri ile sistemi
güvenli biçimde devreden çıkarılmasına yönelik koruma fonksiyonlarını yerine getir-
mektedir. Bu islevler için tasarlanan elektronik sistemin genel görünümü Sekil 5.1’de
görüldügü gibidir.
GerilimNOkumaNKartı
KaynakNGerilimleri
DANBağNGerilimleri
KaynakNAkımları
PAGFAkımları
AkımNOkumaNKartı
BeslemeNKartı
AnaNKontrolKartıN(DSP)
KorumaNKartı
AnahtarlamaNSinyalleri
HataSinyalleri
ELEKTRONİKNSİSTEM
DışNHataSinyalleri
Sekil 5.1. PAGF Elektronik Sistem Blok Diyagramı
Sekil 5.1’de görülen elektronik alt birimlerden, Gerilim Okuma Kartı sebeke gerilimle-
rinin ve PAGF DA bag gerilim sinyallerinin sisteme alınması adına sebeke gerilimleri
için 230V/57V çevrim oranlı bir trafodan sonra kullanılan Hall-etkili sensörler (Hall-
effect sensor) yardımıyla kullanılmıstır. Hall etkili sensörler hem AA ve DA sinyal
79
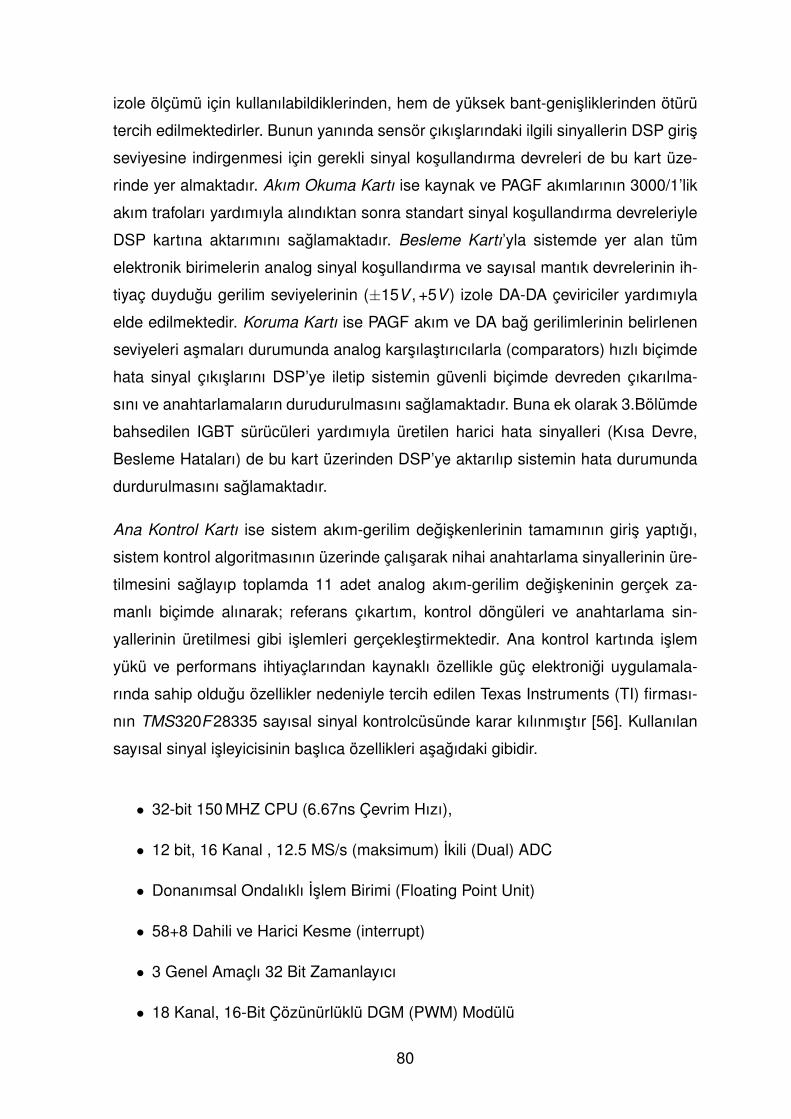
izole ölçümü için kullanılabildiklerinden, hem de yüksek bant-genisliklerinden ötürü
tercih edilmektedirler. Bunun yanında sensör çıkıslarındaki ilgili sinyallerin DSP giris
seviyesine indirgenmesi için gerekli sinyal kosullandırma devreleri de bu kart üze-
rinde yer almaktadır. Akım Okuma Kartı ise kaynak ve PAGF akımlarının 3000/1’lik
akım trafoları yardımıyla alındıktan sonra standart sinyal kosullandırma devreleriyle
DSP kartına aktarımını saglamaktadır. Besleme Kartı’yla sistemde yer alan tüm
elektronik birimelerin analog sinyal kosullandırma ve sayısal mantık devrelerinin ih-
tiyaç duydugu gerilim seviyelerinin (±15V , +5V ) izole DA-DA çeviriciler yardımıyla
elde edilmektedir. Koruma Kartı ise PAGF akım ve DA bag gerilimlerinin belirlenen
seviyeleri asmaları durumunda analog karsılastırıcılarla (comparators) hızlı biçimde
hata sinyal çıkıslarını DSP’ye iletip sistemin güvenli biçimde devreden çıkarılma-
sını ve anahtarlamaların durudurulmasını saglamaktadır. Buna ek olarak 3.Bölümde
bahsedilen IGBT sürücüleri yardımıyla üretilen harici hata sinyalleri (Kısa Devre,
Besleme Hataları) de bu kart üzerinden DSP’ye aktarılıp sistemin hata durumunda
durdurulmasını saglamaktadır.
Ana Kontrol Kartı ise sistem akım-gerilim degiskenlerinin tamamının giris yaptıgı,
sistem kontrol algoritmasının üzerinde çalısarak nihai anahtarlama sinyallerinin üre-
tilmesini saglayıp toplamda 11 adet analog akım-gerilim degiskeninin gerçek za-
manlı biçimde alınarak; referans çıkartım, kontrol döngüleri ve anahtarlama sin-
yallerinin üretilmesi gibi islemleri gerçeklestirmektedir. Ana kontrol kartında islem
yükü ve performans ihtiyaçlarından kaynaklı özellikle güç elektronigi uygulamala-
rında sahip oldugu özellikler nedeniyle tercih edilen Texas Instruments (TI) firması-
nın TMS320F28335 sayısal sinyal kontrolcüsünde karar kılınmıstır [56]. Kullanılan
sayısal sinyal isleyicisinin baslıca özellikleri asagıdaki gibidir.
• 32-bit 150 MHZ CPU (6.67ns Çevrim Hızı),
• 12 bit, 16 Kanal , 12.5 MS/s (maksimum) Ikili (Dual) ADC
• Donanımsal Ondalıklı Islem Birimi (Floating Point Unit)
• 58+8 Dahili ve Harici Kesme (interrupt)
• 3 Genel Amaçlı 32 Bit Zamanlayıcı
• 18 Kanal, 16-Bit Çözünürlüklü DGM (PWM) Modülü
80
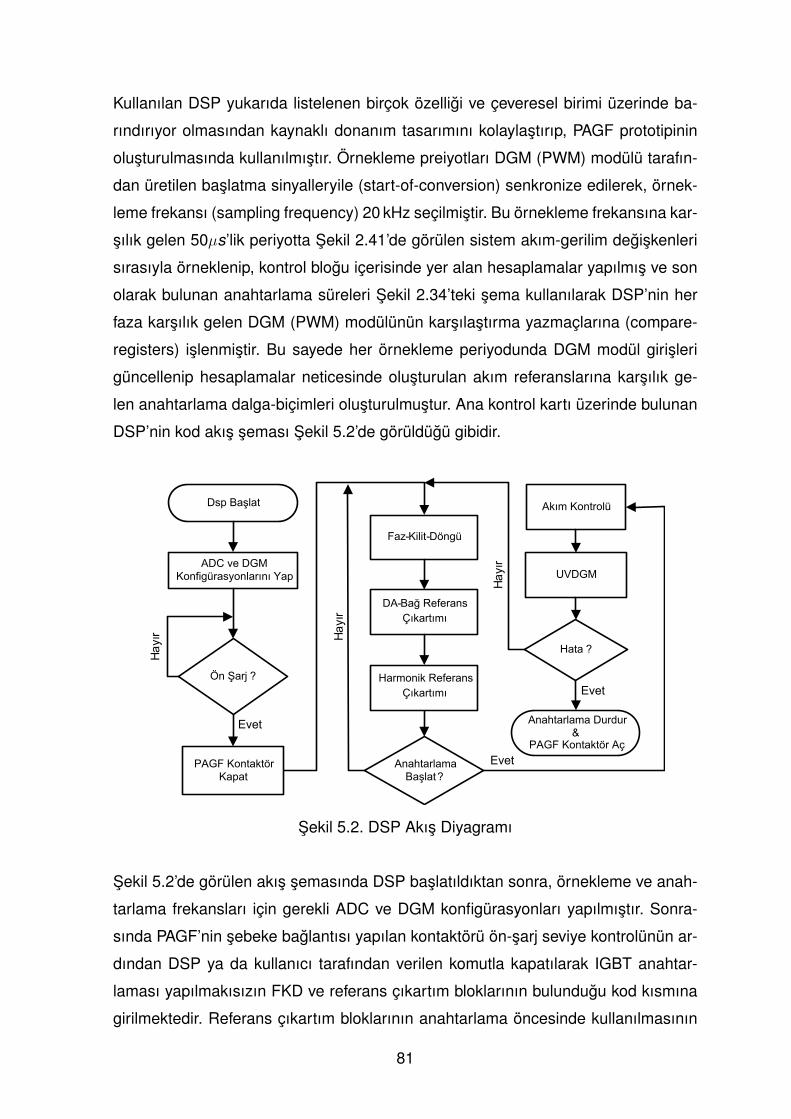
Kullanılan DSP yukarıda listelenen birçok özelligi ve çeveresel birimi üzerinde ba-
rındırıyor olmasından kaynaklı donanım tasarımını kolaylastırıp, PAGF prototipinin
olusturulmasında kullanılmıstır. Örnekleme preiyotları DGM (PWM) modülü tarafın-
dan üretilen baslatma sinyalleryile (start-of-conversion) senkronize edilerek, örnek-
leme frekansı (sampling frequency) 20 kHz seçilmistir. Bu örnekleme frekansına kar-
sılık gelen 50µs’lik periyotta Sekil 2.41’de görülen sistem akım-gerilim degiskenleri
sırasıyla örneklenip, kontrol blogu içerisinde yer alan hesaplamalar yapılmıs ve son
olarak bulunan anahtarlama süreleri Sekil 2.34’teki sema kullanılarak DSP’nin her
faza karsılık gelen DGM (PWM) modülünün karsılastırma yazmaçlarına (compare-
registers) islenmistir. Bu sayede her örnekleme periyodunda DGM modül girisleri
güncellenip hesaplamalar neticesinde olusturulan akım referanslarına karsılık ge-
len anahtarlama dalga-biçimleri olusturulmustur. Ana kontrol kartı üzerinde bulunan
DSP’nin kod akıs seması Sekil 5.2’de görüldügü gibidir.
ADCmvemDGMKonfigürasyonlarınımYap
FazEKilitEDöngü
DAEBağmReferansÇıkartımı
AnahtarlamamBaşlatm?
AkımmKontrolü
UVDGM
Hatam?
DspmBaşlat
ÖnmŞarjm?
PAGFmKontaktörKapat
AnahtarlamamDurdurÖ
PAGFmKontaktörmAç
Ha
yır
Evet
HarmonikmReferansÇıkartımı
Ha
yır
Evet
Ha
yır
Evet
Sekil 5.2. DSP Akıs Diyagramı
Sekil 5.2’de görülen akıs semasında DSP baslatıldıktan sonra, örnekleme ve anah-
tarlama frekansları için gerekli ADC ve DGM konfigürasyonları yapılmıstır. Sonra-
sında PAGF’nin sebeke baglantısı yapılan kontaktörü ön-sarj seviye kontrolünün ar-
dından DSP ya da kullanıcı tarafından verilen komutla kapatılarak IGBT anahtar-
laması yapılmakısızın FKD ve referans çıkartım bloklarının bulundugu kod kısmına
girilmektedir. Referans çıkartım bloklarının anahtarlama öncesinde kullanılmasının
81
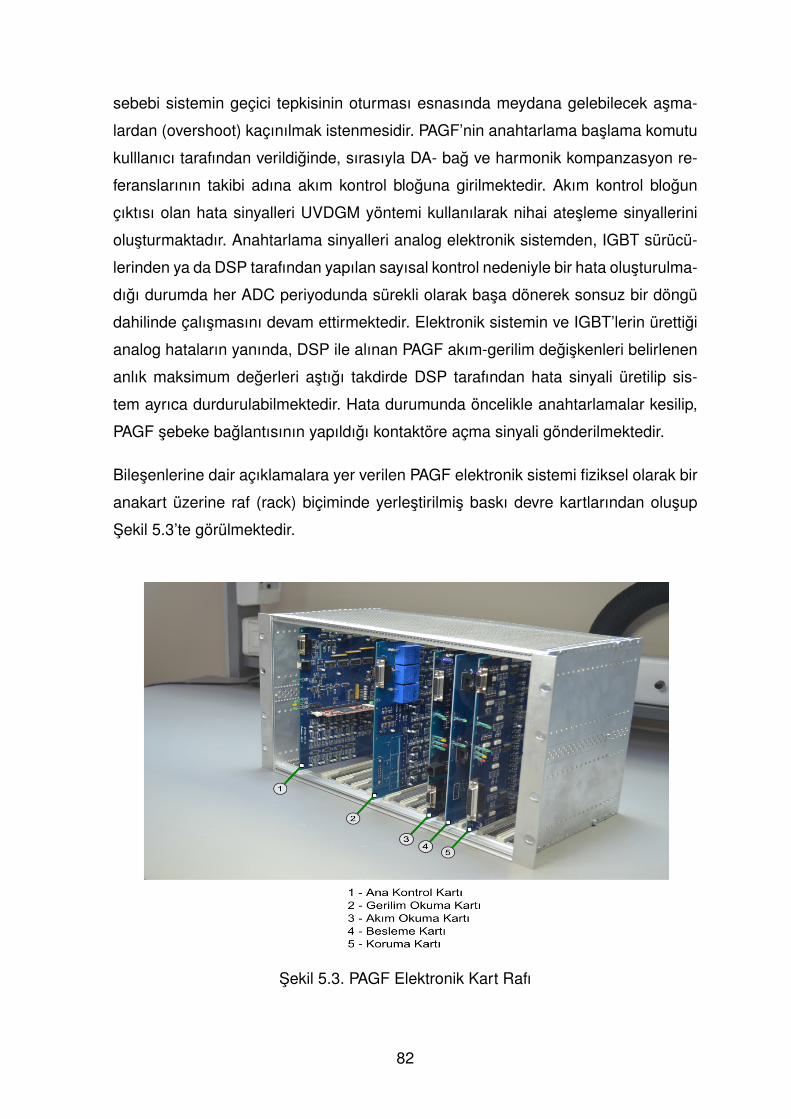
sebebi sistemin geçici tepkisinin oturması esnasında meydana gelebilecek asma-
lardan (overshoot) kaçınılmak istenmesidir. PAGF’nin anahtarlama baslama komutu
kulllanıcı tarafından verildiginde, sırasıyla DA- bag ve harmonik kompanzasyon re-
feranslarının takibi adına akım kontrol bloguna girilmektedir. Akım kontrol blogun
çıktısı olan hata sinyalleri UVDGM yöntemi kullanılarak nihai atesleme sinyallerini
olusturmaktadır. Anahtarlama sinyalleri analog elektronik sistemden, IGBT sürücü-
lerinden ya da DSP tarafından yapılan sayısal kontrol nedeniyle bir hata olusturulma-
dıgı durumda her ADC periyodunda sürekli olarak basa dönerek sonsuz bir döngü
dahilinde çalısmasını devam ettirmektedir. Elektronik sistemin ve IGBT’lerin ürettigi
analog hataların yanında, DSP ile alınan PAGF akım-gerilim degiskenleri belirlenen
anlık maksimum degerleri astıgı takdirde DSP tarafından hata sinyali üretilip sis-
tem ayrıca durdurulabilmektedir. Hata durumunda öncelikle anahtarlamalar kesilip,
PAGF sebeke baglantısının yapıldıgı kontaktöre açma sinyali gönderilmektedir.
Bilesenlerine dair açıklamalara yer verilen PAGF elektronik sistemi fiziksel olarak bir
anakart üzerine raf (rack) biçiminde yerlestirilmis baskı devre kartlarından olusup
Sekil 5.3’te görülmektedir.
Sekil 5.3. PAGF Elektronik Kart Rafı
82
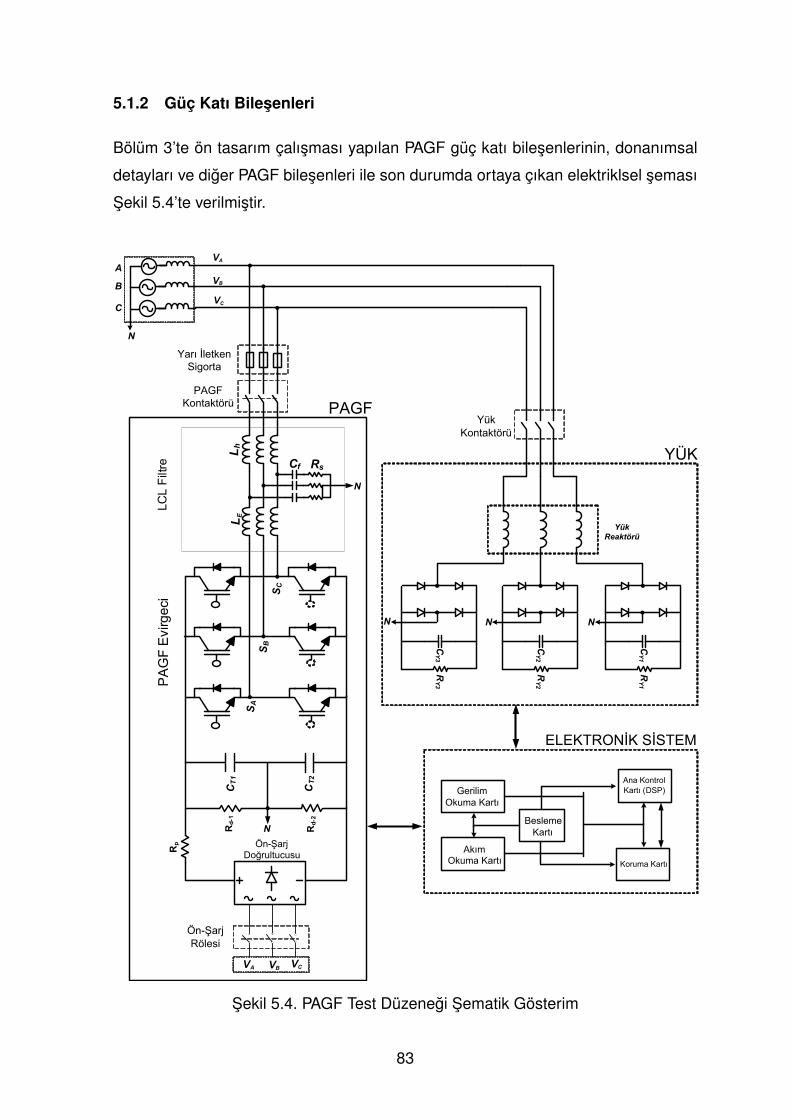
5.1.2 Güç Katı Bilesenleri
Bölüm 3’te ön tasarım çalısması yapılan PAGF güç katı bilesenlerinin, donanımsal
detayları ve diger PAGF bilesenleri ile son durumda ortaya çıkan elektriklsel seması
Sekil 5.4’te verilmistir.
A
B
C
N
N
CT
1
LE
Lh
Cf Rs
Rd-1
Rd-2
VA VBVC
Rp Ön-Şarj
Doğrultucusu
Ön-ŞarjRölesi
CT
2
PA
GF
SEvi
rgec
i
PAGFKontaktörü
LCL
SFilt
re
VA
VB
VC
N
YarıSİletkenSigorta
N
RY
2C
Y2
N
RY
1C
Y1
Yük
Reaktörü
RY
3C
Y3
YükKontaktörü
N
SA
SB
SC
GerilimSOkumaSKartı
AkımSOkumaSKartı
BeslemeSKartı
AnaSKontrolKartıSMDSPÜ
KorumaSKartı
ELEKTRONİKSSİSTEM
YÜK
PAGF
Sekil 5.4. PAGF Test Düzenegi Sematik Gösterim
83
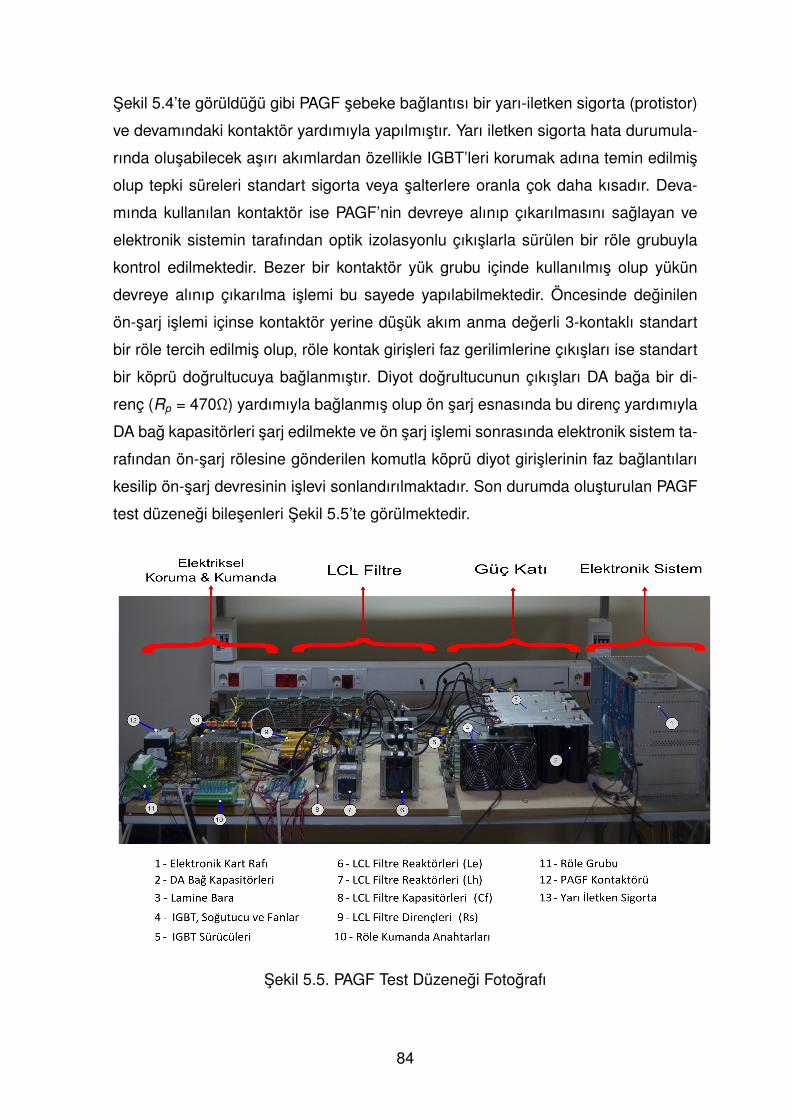
Sekil 5.4’te görüldügü gibi PAGF sebeke baglantısı bir yarı-iletken sigorta (protistor)
ve devamındaki kontaktör yardımıyla yapılmıstır. Yarı iletken sigorta hata durumula-
rında olusabilecek asırı akımlardan özellikle IGBT’leri korumak adına temin edilmis
olup tepki süreleri standart sigorta veya salterlere oranla çok daha kısadır. Deva-
mında kullanılan kontaktör ise PAGF’nin devreye alınıp çıkarılmasını saglayan ve
elektronik sistemin tarafından optik izolasyonlu çıkıslarla sürülen bir röle grubuyla
kontrol edilmektedir. Bezer bir kontaktör yük grubu içinde kullanılmıs olup yükün
devreye alınıp çıkarılma islemi bu sayede yapılabilmektedir. Öncesinde deginilen
ön-sarj islemi içinse kontaktör yerine düsük akım anma degerli 3-kontaklı standart
bir röle tercih edilmis olup, röle kontak girisleri faz gerilimlerine çıkısları ise standart
bir köprü dogrultucuya baglanmıstır. Diyot dogrultucunun çıkısları DA baga bir di-
renç (Rp = 470Ω) yardımıyla baglanmıs olup ön sarj esnasında bu direnç yardımıyla
DA bag kapasitörleri sarj edilmekte ve ön sarj islemi sonrasında elektronik sistem ta-
rafından ön-sarj rölesine gönderilen komutla köprü diyot girislerinin faz baglantıları
kesilip ön-sarj devresinin islevi sonlandırılmaktadır. Son durumda olusturulan PAGF
test düzenegi bilesenleri Sekil 5.5’te görülmektedir.
Sekil 5.5. PAGF Test Düzenegi Fotografı
84
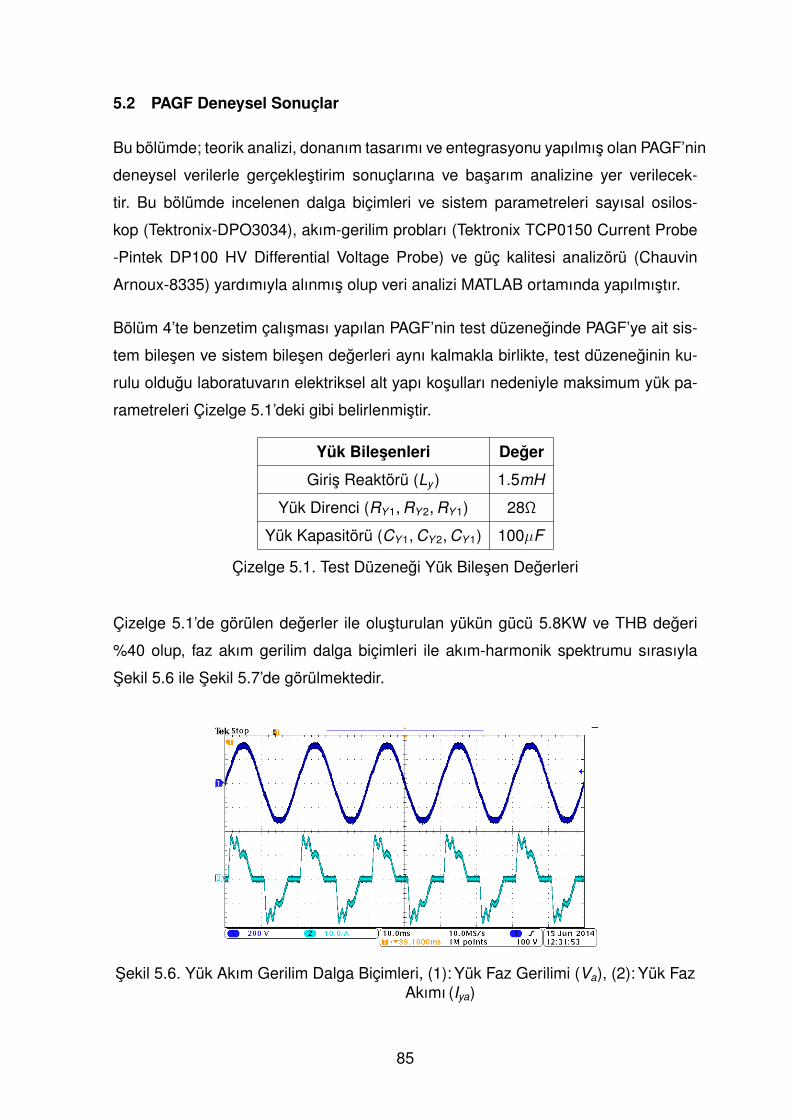
5.2 PAGF Deneysel Sonuçlar
Bu bölümde; teorik analizi, donanım tasarımı ve entegrasyonu yapılmıs olan PAGF’nin
deneysel verilerle gerçeklestirim sonuçlarına ve basarım analizine yer verilecek-
tir. Bu bölümde incelenen dalga biçimleri ve sistem parametreleri sayısal osilos-
kop (Tektronix-DPO3034), akım-gerilim probları (Tektronix TCP0150 Current Probe
-Pintek DP100 HV Differential Voltage Probe) ve güç kalitesi analizörü (Chauvin
Arnoux-8335) yardımıyla alınmıs olup veri analizi MATLAB ortamında yapılmıstır.
Bölüm 4’te benzetim çalısması yapılan PAGF’nin test düzeneginde PAGF’ye ait sis-
tem bilesen ve sistem bilesen degerleri aynı kalmakla birlikte, test düzeneginin ku-
rulu oldugu laboratuvarın elektriksel alt yapı kosulları nedeniyle maksimum yük pa-
rametreleri Çizelge 5.1’deki gibi belirlenmistir.
Yük Bilesenleri Deger
Giris Reaktörü (Ly ) 1.5mH
Yük Direnci (RY 1, RY 2, RY1) 28Ω
Yük Kapasitörü (CY 1, CY 2, CY 1) 100µF
Çizelge 5.1. Test Düzenegi Yük Bilesen Degerleri
Çizelge 5.1’de görülen degerler ile olusturulan yükün gücü 5.8KW ve THB degeri
%40 olup, faz akım gerilim dalga biçimleri ile akım-harmonik spektrumu sırasıyla
Sekil 5.6 ile Sekil 5.7’de görülmektedir.
Sekil 5.6. Yük Akım Gerilim Dalga Biçimleri, (1): Yük Faz Gerilimi (Va), (2): Yük FazAkımı (Iya)
85
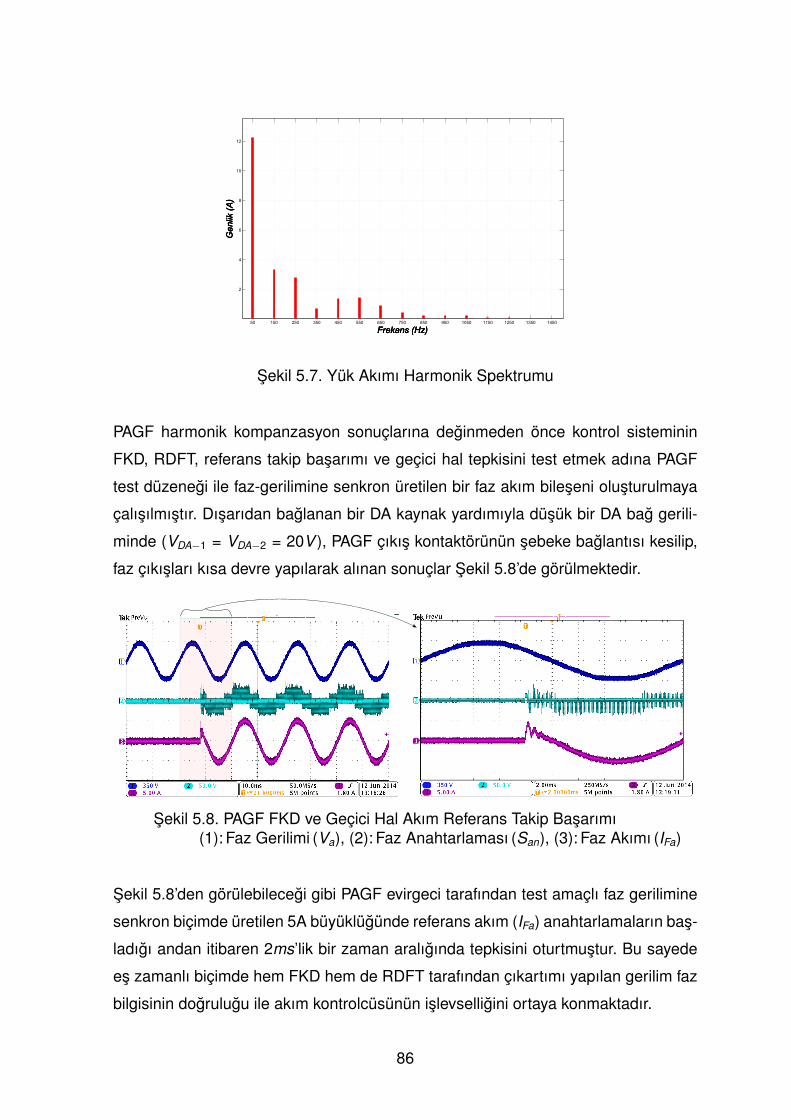
50 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 1450
2
4
6
8
10
12
Frekans (Hz)Frekans (Hz)Frekans (Hz)Frekans (Hz)
Genlik (A)
Genlik (A)
Genlik (A)
Genlik (A)
Sekil 5.7. Yük Akımı Harmonik Spektrumu
PAGF harmonik kompanzasyon sonuçlarına deginmeden önce kontrol sisteminin
FKD, RDFT, referans takip basarımı ve geçici hal tepkisini test etmek adına PAGF
test düzenegi ile faz-gerilimine senkron üretilen bir faz akım bileseni olusturulmaya
çalısılmıstır. Dısarıdan baglanan bir DA kaynak yardımıyla düsük bir DA bag gerili-
minde (VDA−1 = VDA−2 = 20V ), PAGF çıkıs kontaktörünün sebeke baglantısı kesilip,
faz çıkısları kısa devre yapılarak alınan sonuçlar Sekil 5.8’de görülmektedir.
Sekil 5.8. PAGF FKD ve Geçici Hal Akım Referans Takip Basarımı(1): Faz Gerilimi (Va), (2): Faz Anahtarlaması (San), (3): Faz Akımı (IFa)
Sekil 5.8’den görülebilecegi gibi PAGF evirgeci tarafından test amaçlı faz gerilimine
senkron biçimde üretilen 5A büyüklügünde referans akım (IFa) anahtarlamaların bas-
ladıgı andan itibaren 2ms’lik bir zaman aralıgında tepkisini oturtmustur. Bu sayede
es zamanlı biçimde hem FKD hem de RDFT tarafından çıkartımı yapılan gerilim faz
bilgisinin dogrulugu ile akım kontrolcüsünün islevselligini ortaya konmaktadır.
86
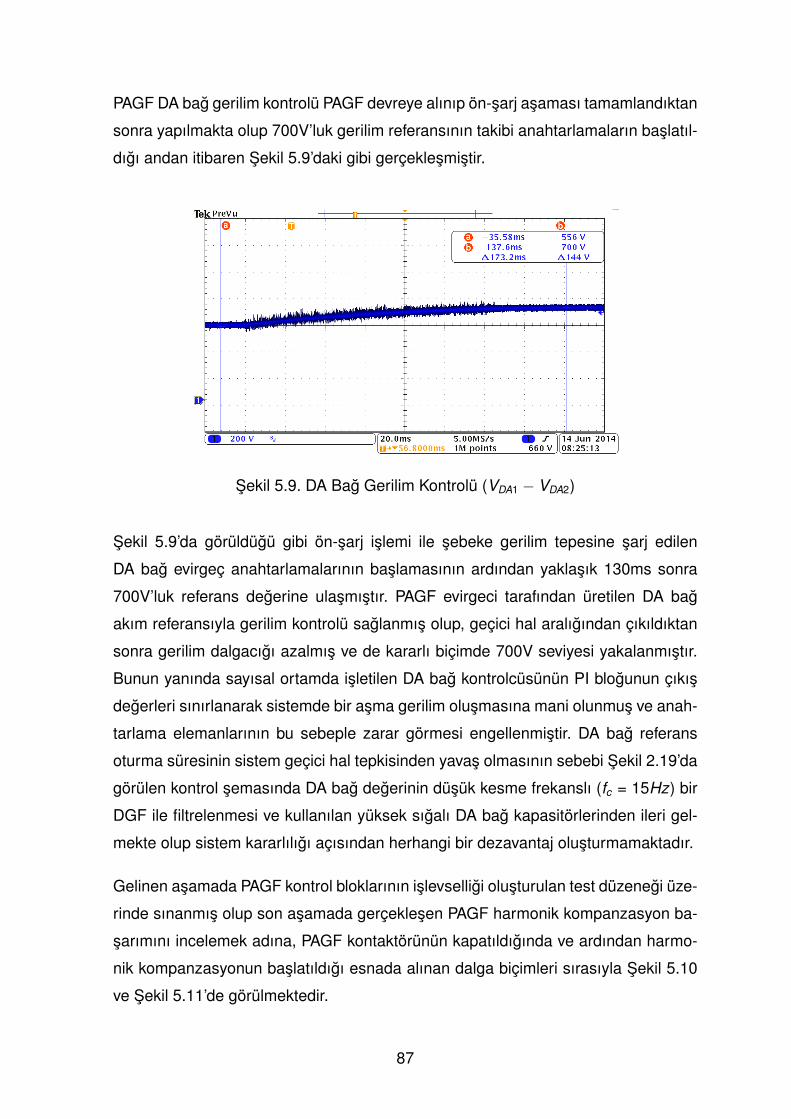
PAGF DA bag gerilim kontrolü PAGF devreye alınıp ön-sarj asaması tamamlandıktan
sonra yapılmakta olup 700V’luk gerilim referansının takibi anahtarlamaların baslatıl-
dıgı andan itibaren Sekil 5.9’daki gibi gerçeklesmistir.
Sekil 5.9. DA Bag Gerilim Kontrolü (VDA1 − VDA2)
Sekil 5.9’da görüldügü gibi ön-sarj islemi ile sebeke gerilim tepesine sarj edilen
DA bag evirgeç anahtarlamalarının baslamasının ardından yaklasık 130ms sonra
700V’luk referans degerine ulasmıstır. PAGF evirgeci tarafından üretilen DA bag
akım referansıyla gerilim kontrolü saglanmıs olup, geçici hal aralıgından çıkıldıktan
sonra gerilim dalgacıgı azalmıs ve de kararlı biçimde 700V seviyesi yakalanmıstır.
Bunun yanında sayısal ortamda isletilen DA bag kontrolcüsünün PI blogunun çıkıs
degerleri sınırlanarak sistemde bir asma gerilim olusmasına mani olunmus ve anah-
tarlama elemanlarının bu sebeple zarar görmesi engellenmistir. DA bag referans
oturma süresinin sistem geçici hal tepkisinden yavas olmasının sebebi Sekil 2.19’da
görülen kontrol semasında DA bag degerinin düsük kesme frekanslı (fc = 15Hz) bir
DGF ile filtrelenmesi ve kullanılan yüksek sıgalı DA bag kapasitörlerinden ileri gel-
mekte olup sistem kararlılıgı açısından herhangi bir dezavantaj olusturmamaktadır.
Gelinen asamada PAGF kontrol bloklarının islevselligi olusturulan test düzenegi üze-
rinde sınanmıs olup son asamada gerçeklesen PAGF harmonik kompanzasyon ba-
sarımını incelemek adına, PAGF kontaktörünün kapatıldıgında ve ardından harmo-
nik kompanzasyonun baslatıldıgı esnada alınan dalga biçimleri sırasıyla Sekil 5.10
ve Sekil 5.11’de görülmektedir.
87
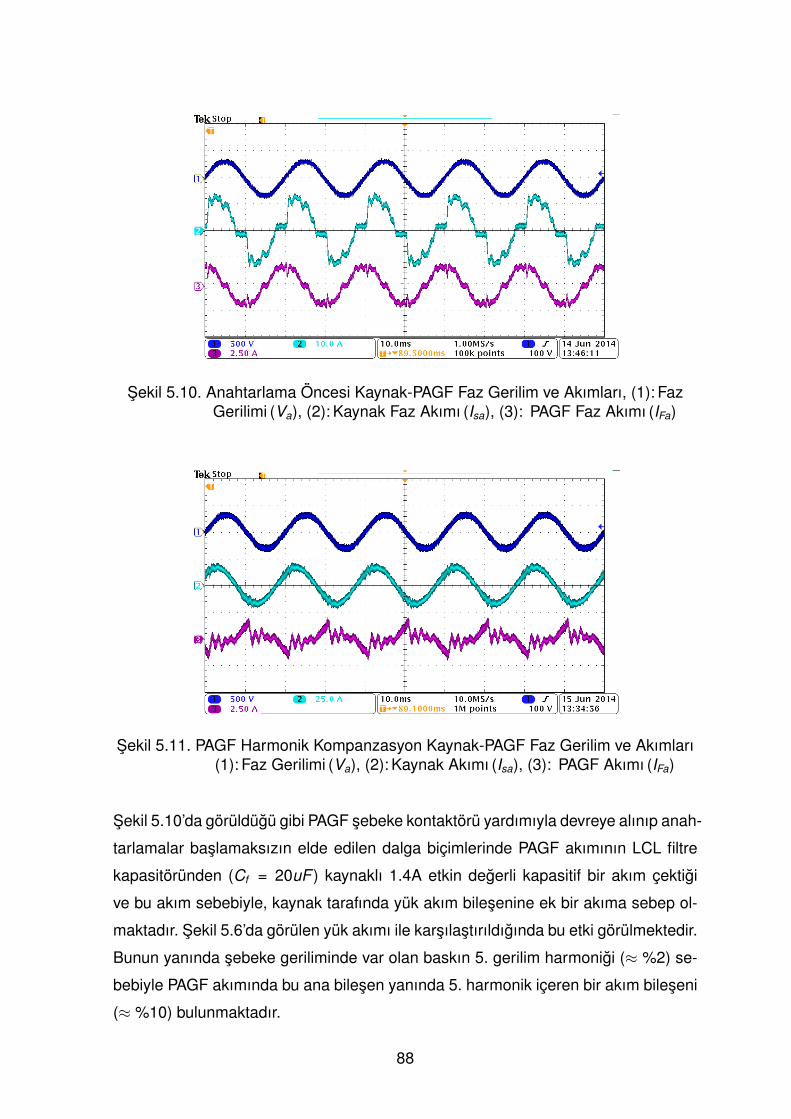
Sekil 5.10. Anahtarlama Öncesi Kaynak-PAGF Faz Gerilim ve Akımları, (1): FazGerilimi (Va), (2): Kaynak Faz Akımı (Isa), (3): PAGF Faz Akımı (IFa)
Sekil 5.11. PAGF Harmonik Kompanzasyon Kaynak-PAGF Faz Gerilim ve Akımları(1): Faz Gerilimi (Va), (2): Kaynak Akımı (Isa), (3): PAGF Akımı (IFa)
Sekil 5.10’da görüldügü gibi PAGF sebeke kontaktörü yardımıyla devreye alınıp anah-
tarlamalar baslamaksızın elde edilen dalga biçimlerinde PAGF akımının LCL filtre
kapasitöründen (Cf = 20uF ) kaynaklı 1.4A etkin degerli kapasitif bir akım çektigi
ve bu akım sebebiyle, kaynak tarafında yük akım bilesenine ek bir akıma sebep ol-
maktadır. Sekil 5.6’da görülen yük akımı ile karsılastırıldıgında bu etki görülmektedir.
Bunun yanında sebeke geriliminde var olan baskın 5. gerilim harmonigi (≈ %2) se-
bebiyle PAGF akımında bu ana bilesen yanında 5. harmonik içeren bir akım bileseni
(≈ %10) bulunmaktadır.
88
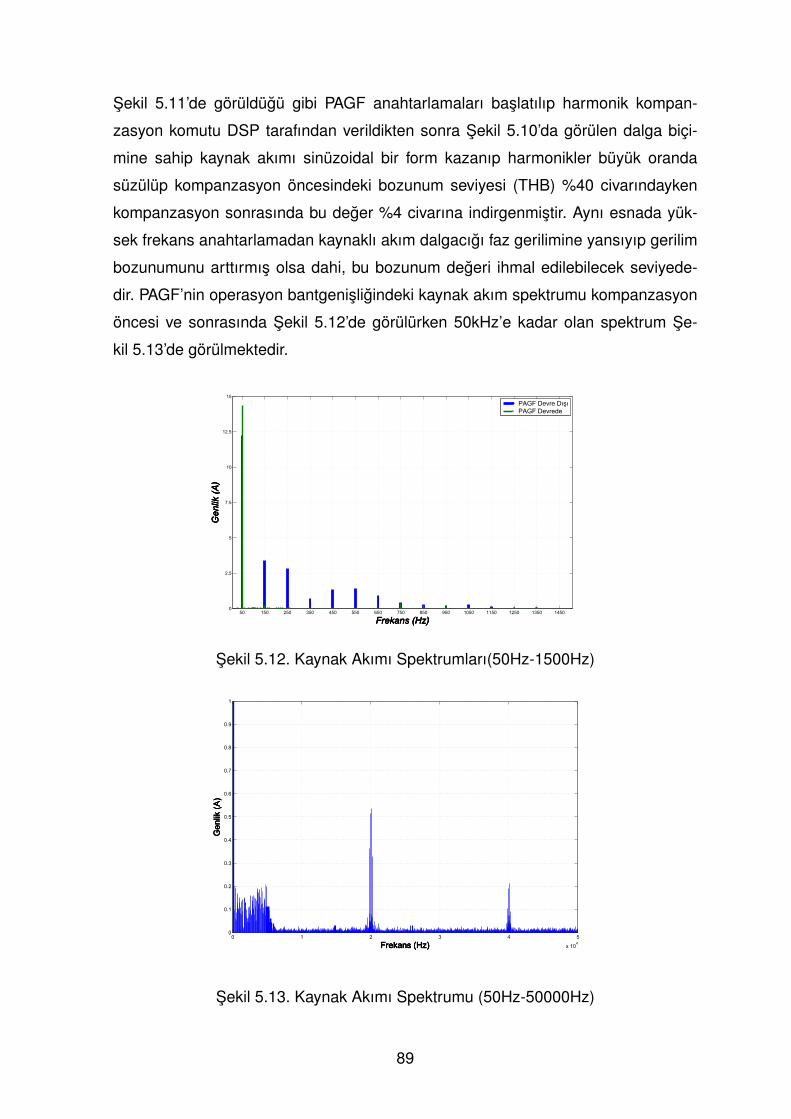
Sekil 5.11’de görüldügü gibi PAGF anahtarlamaları baslatılıp harmonik kompan-
zasyon komutu DSP tarafından verildikten sonra Sekil 5.10’da görülen dalga biçi-
mine sahip kaynak akımı sinüzoidal bir form kazanıp harmonikler büyük oranda
süzülüp kompanzasyon öncesindeki bozunum seviyesi (THB) %40 civarındayken
kompanzasyon sonrasında bu deger %4 civarına indirgenmistir. Aynı esnada yük-
sek frekans anahtarlamadan kaynaklı akım dalgacıgı faz gerilimine yansıyıp gerilim
bozunumunu arttırmıs olsa dahi, bu bozunum degeri ihmal edilebilecek seviyede-
dir. PAGF’nin operasyon bantgenisligindeki kaynak akım spektrumu kompanzasyon
öncesi ve sonrasında Sekil 5.12’de görülürken 50kHz’e kadar olan spektrum Se-
kil 5.13’de görülmektedir.
50 150 250 350 450 550 650 750 850 950 1050 1150 1250 1350 14500
2.5
5
7.5
10
12.5
15
Frekans (Hz)Frekans (Hz)Frekans (Hz)Frekans (Hz)
Ge
nlik
(A
)G
en
lik (
A)
Ge
nlik
(A
)G
en
lik (
A)
PAGF Devre DışıPAGF Devrede
Sekil 5.12. Kaynak Akımı Spektrumları(50Hz-1500Hz)
0 1 2 3 4 5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frekans (Hz)Frekans (Hz)Frekans (Hz)Frekans (Hz)
Ge
nlik
(A
)G
en
lik (
A)
Ge
nlik
(A
)G
en
lik (
A)
Sekil 5.13. Kaynak Akımı Spektrumu (50Hz-50000Hz)
89

Sekil 5.12’de görüldügü gibi PAGF kaynak akımında yer alan baskın harmonikleri
büyük oranda süzmekle birlikte yükselen harmonik sırası ve düsen harmonik gen-
ligiyle beraber, performansı göreli olarak düsmektedir. Bunun muhtemel sebepleri,
akım trafoları ve elektronik sistemin kaynaklanan okuma hataları ile kontrol döngü-
sündeki zaman gecikmeleri (time-delay) ve nümerik hassasiyet sınırlarıdır. Ana bile-
sendeki (50Hz) artıs ise PAGF evirgecinin kayıplarından kaynaklanmakta olup belir-
lenen yük ve PAGF kosullarında yaklasık 1.6kW olarak gerçeklesmistir. Bu degerin
ön tasarım çalısmasında belirlenen degerle (1.5kW ) yaklasık olarak örtüstügü söy-
lenebilir. Bunun yanında Sekil 5.13’ten görüldügü gibi kaynak akımı beklenildigi gibi
temel anahtarlama frekansı (20kHz) ve katları ile LCL filtre rezonans frekansında
(4.6kHz) bilesenler içermesine karsın ihmal edilebilecek büyüklüklerde olup akım
dalgacıgının büyük oranda elendigi görülmüstür. Benzetim çalısmasındaki sonuca
oranla rezonans frekansı civarında görülen harmonik içerigin düsük olmasının se-
bebi akım kontrol döngüsünde kullanılan oransal katsayının (Kc) düsük tutulmasıdır.
Bunun temel sebebi uygulamada karsılasılan zaman gecikmelerinin sistemin faz-
payını azaltması ve elektronik sistemden kaynaklanan rasgele gürültünün (random-
noise) bu katsayıyla artıs gösterip sayısal kontrolcünün kararlılıgına olumsuz yönde
etki yapmasıdır. Bu sebeple gerçel sistemde olusan salınımlar ileri asamada sis-
tem kararlılıgının tamamen yitirilmesine sebep olmaktadır. Bu durumdan kaçınmak
adına oransal katsayı sistem harmonik kompanzasyon ihtiyaçlarını karsılayacak mi-
nimum bir degerde (Kc = 7) tutulmustur. Bunların yanında belirlenen anahtarlama
ve örnekleme frekansının sistem performansına ve kararlılıgına önemli biçimde et-
kiyip, örnekleme frekansının arttıgı durumlarda PAGF’nin daha iyi kompanzasyon
performansı saglıyor oldugu görülmüstür. Buna karsın kullanılan DSP’nin özellikle
RDFT yönteminin getirdigi islem yükünden kaynaklı döngü sürelerini asması nede-
niyle yüksek örnekleme hızlarına çıkılamamıstır. Son durumda belirtilen yük para-
metreleri ile kompanzasyon sonuçlarına ait veriler Çizelge 5.2’de listelenmistir.
Kaynak Akımı Harmonik Bilesenleri (A)
Harmonik Sırası IS1 IS3 IS5 IS7 IS9 IS11 IS13 THB(%)
PAGF Devre Dısı 12.2 3.30 2.7 0.7 1.3 1.4 0.8 39.6
PAGF Devrede 14.4 0.19 0.07 0.07 0.07 0.07 0.08 3.81
Çizelge 5.2. PAGF Harmonik Kompanzasyon Sonuçları
Analizi yapılan harmonik kompanzasyon sonuçlarının yanında 3-Faz 4-Telli PAGF’nin
90
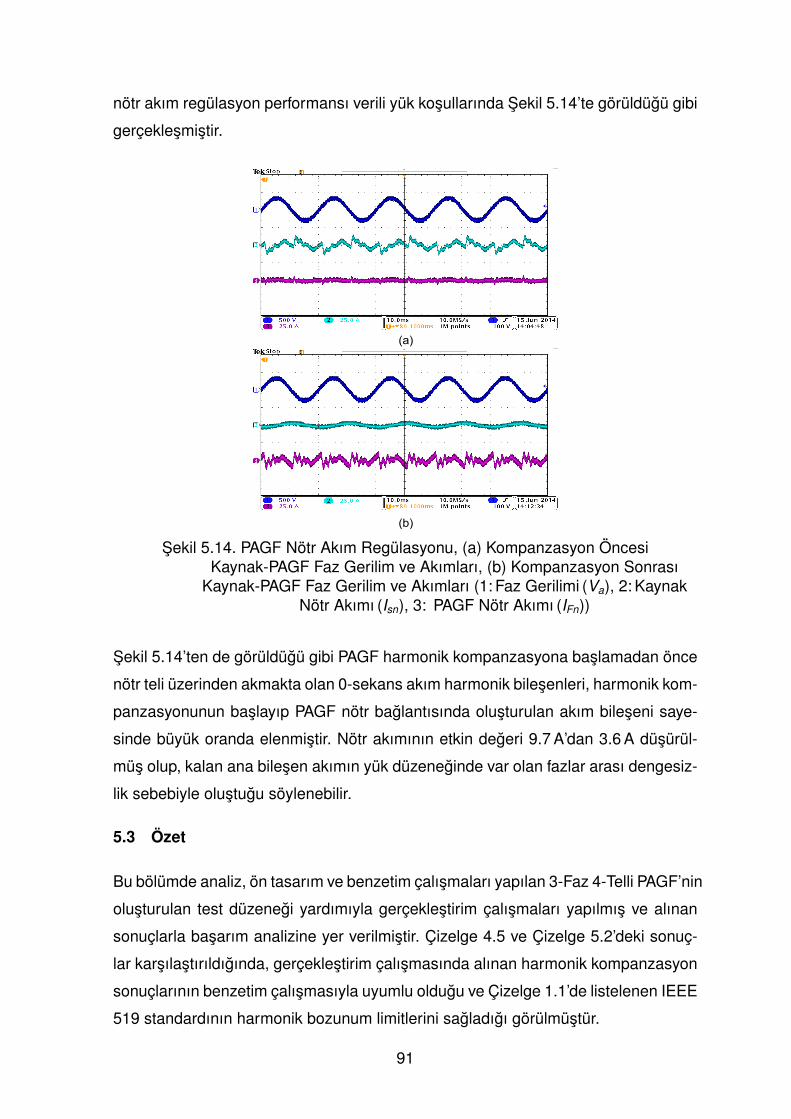
nötr akım regülasyon performansı verili yük kosullarında Sekil 5.14’te görüldügü gibi
gerçeklesmistir.
(a)
(b)
Sekil 5.14. PAGF Nötr Akım Regülasyonu, (a) Kompanzasyon ÖncesiKaynak-PAGF Faz Gerilim ve Akımları, (b) Kompanzasyon Sonrası
Kaynak-PAGF Faz Gerilim ve Akımları (1: Faz Gerilimi (Va), 2: KaynakNötr Akımı (Isn), 3: PAGF Nötr Akımı (IFn))
Sekil 5.14’ten de görüldügü gibi PAGF harmonik kompanzasyona baslamadan önce
nötr teli üzerinden akmakta olan 0-sekans akım harmonik bilesenleri, harmonik kom-
panzasyonunun baslayıp PAGF nötr baglantısında olusturulan akım bileseni saye-
sinde büyük oranda elenmistir. Nötr akımının etkin degeri 9.7 A’dan 3.6 A düsürül-
müs olup, kalan ana bilesen akımın yük düzeneginde var olan fazlar arası dengesiz-
lik sebebiyle olustugu söylenebilir.
5.3 Özet
Bu bölümde analiz, ön tasarım ve benzetim çalısmaları yapılan 3-Faz 4-Telli PAGF’nin
olusturulan test düzenegi yardımıyla gerçeklestirim çalısmaları yapılmıs ve alınan
sonuçlarla basarım analizine yer verilmistir. Çizelge 4.5 ve Çizelge 5.2’deki sonuç-
lar karsılastırıldıgında, gerçeklestirim çalısmasında alınan harmonik kompanzasyon
sonuçlarının benzetim çalısmasıyla uyumlu oldugu ve Çizelge 1.1’de listelenen IEEE
519 standardının harmonik bozunum limitlerini sagladıgı görülmüstür.
91
6. SONUÇLAR
Bu tez çalısmasında önemli güç kalitesi problemlerinden biri olan harmoniklerin
elenmesinde kullanılan aktif güç filtrelerinden, gerilim kaynaklı evirgeç tabanlı 3 faz
4 telli PAGF yapısal ve fonksiyonel açıdan incelenip; tasarım, benzetim ve gerçek-
lestirim çalısmalarına yer verilmistir. 3 faz 4 telli PAGF’ler özellikle faz nötr baglı
0-sekans bilesen üreten yüklerin agrlıklı olarak bulundugu yerlerde kullanılmakta
olup faz akımlarında bulunan harmoniklerin yanısıra nötr akımının da harmonikleri-
nin elenmesine olanak tanımaktadırlar. Bu tez kapsamında PAGF’lerde bu islevleri
yerine getirmek adına kullanılan çesitli yöntem ve yapılar ayrıntılı biçimde incelenip,
öne çıkan yöntem ve yapıların (RDFT, UVDGM ve LCL filtre) benzetim ve gerçek-
lestirim çalısmalarıyla islevsellikleri ortaya konmustur.
PAGF’lerde referans çıkartım baslıgında genellikle tercih edilen zaman alanlı yön-
temlerin, içerilmesine karar verilen kompanzasyon islevleri açısından tasıdıkları uy-
gulama dezavantajları ve frekans alanında kullanılan standart DFT ya da FFT gibi
yöntemlerin gerçek zamanlı uygulama zorluklarından ötürü son yıllarda güç elekt-
ronigi uygulamalarında da kullanılmaya baslanmıs frekans alanlı bir yöntem olan
RDFT, harmonik referans çıkartım algoritması olarak kullanılıp, yönteme iliskin de-
taylar aktarılmıstır. Evirgeç anahtarlamasında UVDGM yöntemi tasıdıgı avantajlar-
dan ötürü temel modülasyon yöntemi olarak belirlenmis olup; 3 telli ve 4 telli sistem-
lerdeki farklılıklarına, kullanılan evirgeç topolojisine uyarlanısına ve sayısal ortam
uygulamasına yer verilmistir. Arayüz filtrelerinin incelendigi bölümde ise L filtrelere
göre birçok açıdan avantajlı olan LCL filtrelerin uygulama esaslarına deginilip, temel
analizine yer verilmistir. Sistem ön tasarım çalısmasında PAGF’nin güç katı bilesen-
lerinin degerleri planlanan anma degerlerine göre belirlenmis olup kullanılan malze-
melere iliskin seçim kriterleri ortaya konulmus ve bunun yanında lamine bara tasarım
detaylarına deginilmistir. Benzetim çalısmasında belirlenen yük ve sebeke kosulla-
rında PAGF fonksiyonel bloklarının ve bir bütün olarak sistemin islevselligi PSCAD
ortamında olusturulan bir benzetim modeli yardımıyla ortaya konulmustur. Gerçek-
lestirim çalısmasında ise benzetim çalısmasındaki yöntem ve sıra ile kompanzasyon
basarımına ait sonuçlar yorumlanmıstır.
Bu tez çalısmasında kullanılan yöntem ve yapıların birçogu (RDFT, UVDGM ve LCL
filtre) son zamanlarda tercih edilmeye baslanmıs yöntemler olup tez çalısması da-
92
hilinde birçok açıdan detaylı biçimde incelenmislerdir. Bu yöntemlerden; gerçek za-
manlı uygulamalara kolaylıkla entegre edilebilen RDFT yöntemiyle akım harmonik-
lerinin hızlı ve hassas biçimde çıkartımının yapılabildigi benzetim ve gerçeklestirim
çalısmalarıyla ortaya konmustur. UVDGM yöntemi ise 3 faz 4 telli yapılar için SDGM
yöntemine göre verimlilik anlamında ciddi bir fark olusturmamasına karsın, üretilen
sinyal bozunum oranlarının SDGM yöntemine göre daha düsük olmasından dolayı
tercih edilmis ve bu modülasyon seması ile evirgeç anahtarlaması gerçeklestirilmis-
tir. LCL filtre baslıgındaysa, belirlenen filtre bilesen degerleri ile hedeflenen yüksek
frekans bilesen azaltım oranlarına ulasıldıgı, benzetim ve gerçeklestirim çalısmaları
itibariyle ortaya konulmustur.
Sonuç olarak PAGF’nin; analiz, tasarım, benzetim ve gerçeklestirim asamalarından
sonra ortaya çıkan sonuçlarla, hedeflenen harmonik kompanzasyon basarım kri-
terlerinin farklı yük kosulları ve harmonik akım seviyelerinde, IEEE-519 standardı
dahilinde saglandıgı görülmüstür.
Gelecekte yapılacak olası çalısmalara yön göstermesi açısından PAGF sisteminde;
özellikle gerçeklestirim asamasında karsılasılan referans takip basarımı, yüksek sı-
ralı harmonik referans çıkartımı hassasiyeti, gürültü dayanımı ve genel harmonik
kompanzasyon performansının arttırılması adına daha yüksek örnekleme hızlarıyla
DGM çözünürlügüne sahip yüksek islem kapasiteli DSP’lerin kullanılmasının ge-
reginden bahsedilebilir. Bunun yanında LCL filtrelerde, pasif sönümlendirmeye al-
ternatif olabilecek aktif sönümlendirme yöntemlerinin kullanılmasının ileri asamada,
sistemdeki sönümlendirme dirençlerine gerek bırakmayarak PAGF’ye hem malzeme
adedi hem de güç kayıpları açısından fayda saglayabilecegi söylenebilir. Bu çalısma
ile aynı zamanda endüstriyel uygulaması yapılacak olan bir PAGF sisteminin basarılı
bir prototipi ortaya çıkarılıp, bu ve önceki bölümlerde deginilen ileri yöntemler için bir
uygulama zemini olusturulmustur.
93
KAYNAKLAR
[1] R.C. Dugan, M.F. Mcgranaghan, S. Santoso H.W Beaty Electrical Power Sys-tem Quality, 2nd ed. McGraw-Hill, 2002.
[2] IEEE Recommended Practice for Monitoring Electric Power Quality, IEEE Std.1159-1995
[3] Elektrik Iletim Sistemi Arz Güvenilirligi ve Kalitesi Yönetmeligi T.C. Enerji Pi-yasası Düzenleme Kurumu, 2004.
[4] Elektrik Piyasasında Dagıtım Sisteminde Sunulan Elektrik Enerjisinin TedarikSürekliligi, Ticari ve Teknik Kalitesi Hakkında Yönetmelik T.C. Enerji PiyasasıDüzenleme Kurumu, 2006.
[5] IEEE Practices and Requirements for Harmonic Control in Electrical PowerSystems, IEEE Std. 519-1992, 1998.
[6] Electromagnetic compatibility (EMC) Part 3-4: Limits - Limitation of emissionof harmonic currents in low-voltage power supply systems for equipment withrated current greater than 16 A, IEC 61000-3-4 Ed.1, 1998.
[7] H. Özkaya Parallel Active Filter Design, Control and Implementation, YüksekLisans Tezi, ODTÜ, 2002.
[8] A. Dominjan, E.E. Santander A Summary and Evaluation of Recent Develop-ments on Harmonic Mitigation Techniques Useful To Adjustable Speed Drives,IEEE Transactions on Energy Conversion, Vol. 7, No.1, University of Florida1992.
[9] H. Akagi Active Harmonic Filters , Proceedings of the IEEE, Vol. 93, No. 12,2005.
[10] H. Akagi New Trends in Active Filters for Power Conditioning , IEEE Transac-tions on Industry Applications, Vol. 40, No. 12, 1996.
[11] A.Lindemann, A new IGBT with Reverse Blocking Capability 2001,http://www.ixys.com/Documents/AppNotes/IXAN0049.pdf (2014)
[12] M. Routimo, M. Salo, H. Tuusa Comparison of Voltage Source and CurrentSource Shunt Active Power Filters, IEEE Transactions on Power Electronics,Vol. 22, No.2, 2007.
[13] M. Ucar and E. Ozdemir, Control of a 3-phase 4-leg active power filter undernon-ideal mains voltage condition, Electric Power Syst. Res. vol. 78 pp. 58-73,2008.
[14] C.A. Quin, N. Mohan Active Filtering of Harmonic Currents in three-phase,four-wire systems with three phase and single phase nonlinear loads, Proce-eding of IEEE, pp. 829-836, 1992.
[15] Kouzou A, Mahmoudi M.O and Boucherit M.S, The Space Vector ModulationPWM Control Methods Applied on Four Leg Inverters, 2011.
94
[16] N. Mendalek, Modeling and Control of Three-Phase Four-Leg Split-CapacitorShunt Active Power Filter, ACTEA ’09. International Conference on Advancesin Computational Tools for Engineering Applications, pp. 121-126 2009.
[17] F. Z. Peng, Application issues of active power filters, IEEE Industrial ApplicationMagazine, pp. 21-30, 2001.
[18] S. Bhattacharya, D. Divan, Active filter solutions for utility interface of industrialloads, IEEE International Conference on Power Electronics, Drives and EnergySystems for Industrial Growth (PEDES 96), pp. 1078- 1084, 1996.
[19] H. Akagi, Y. Kanazawa, A. Nabae, Instantaneous reactive power compensatorscomprising switching devices without energy storage components, IEEE Trans.Ind. Applicat., vol. 20, no. 3 pp. 625-630, 1984.
[20] H. Akagi, E. H. Watanabe, M. Aredes, Instantaneous Power Theory and App-lications to Power Conditioning, IEEE Press, Wiley, 2007.
[21] S. J. Jeon, Unification and Evaluation of the Instantaneous Reactive PowerTheories IEEE Trans. Ind. Applicat., vol. 20, no. 3 pp. 625-630, 2006.
[22] S.Bhattacharya, Shunt compensation Industrial Electronics Magazine, IEEE,vol.3, no.3, pp.38,49, 2009.
[23] Limongi, L. R.; Bojoi, R.; Pica, C.; Profumo, F.; Tenconi, A.,Analysis and Com-parison of Phase Locked Loop Techniques for Grid Utility Applications, PowerConversion Conference-Nagoya, PCC ’07 , vol., no., pp.674, 681, 2007.
[24] Nicastri, A. Nagliero, A.,Comparison and evaluation of the PLL techniques forthe design of the grid-connected inverter systems, Industrial Electronics (ISIE),2010 IEEE International Symposium on, vol., no., pp.3865,3870, 4-7 2010.
[25] The instantaneous power theory on the rotating p-q-r reference frames, Pro-ceedings of the IEEE 1999 International Conference on, vol.1, no., pp.422,427vol.1, 1999.
[26] R. Hao, Z. Cheng, X. You, A Novel Harmonic Currents Detection Method Ba-sed on Rotating d-q Reference Frame for Active Power Filter, Power Elects.Specialists Conf, pp. 3034-3038, 2004.
[27] S. Peterson, Comparative Study of Microcontroller Controlled Four Wire Vol-tage and Current Source Active Power Filters, Tampere University of Techno-logy, PHD Thesis, 2009.
[28] L. Asiminoaei, F. Blaabjerg, S. Hansen, Detection Is Key, IEEE Industrial App-lication Magazine, pp. 22-33, 2007.
[29] J. W. Cooley and J. W. Tukey An Algorithm for the Machine Calculation ofComplex Fourier Series, Mathematics of Computation Vol. 19, No.90 pp. 297-301, 1965.
[30] A. V. Oppenheim and R. W. Schafer Digital Signal Processing, Prentice Hall,1975.
95
[31] J. W. Cooley and J. W. Tukey An Algorithm for the Machine Calculation ofComplex Fourier Series, Mathematics of Computation Vol. 19, No.90 pp. 297-301, 1965.
[32] Srianthumrong, S.; Sangwongwanich, S., Recursive computation of the Fo-urier transform, Harmonics and Quality of Power Proceedings. 8th Internati-onal Conference On , vol.1, no., pp.127,132 vol.1, 14-18, 1998.
[33] Hartley, R.; Welles, K. An active power filter with harmonic detection met-hod based on recursive DFT IEEE International Symposium on , vol., no.,pp.1792,1795 vol.3, 1990.
[34] Won Y. Yang · Tae G. Chang · Ik H. Song · Yong S. Cho · Jun Heo · WonG. Jeon · Jeong W. Lee · Jae K. Kim Digital Signal Processing with MATLABSpringer, 2009.
[35] Sun-kyoung Lim; Jun-Ha Kim; Kwanghee Nam, A DC-link voltage balancingalgorithm for 3-level converter using the zero sequence current, PESC 99. 30thAnnual IEEE , vol.2, no., pp.1083,1088, 1999.
[36] Donghua Chen; Shaojun Xie, Review of the control strategies applied to activepower filters, Proceedings of the 2004 IEEE International Conference on, vol.2,no., pp.666,670 Vol.2, 5-8, 2004.
[37] Green, T.C.; Marks, J.H., Control techniques for active power filters, IEE Pro-ceedings, vol.152, no.2, pp.369, 381, 2005.
[38] Heredia, A.L.; Gaztanaga, H.; Etxeberria-Otadui, I.; Bacha, S.; Roye, D.; Gu-iraud, J.; Reyero, R., Evaluation of stationary frame and fixed switching fre-quency digital current control techniques for power active filters, IEEE PowerElectronics and Applications-European Confererence (EPE), 2005.
[39] A. Martins, J. Ferreira, H.Azevedo, Active Power Filters for Harmonic Elimi-nation and Power Quality Improvement, Power Quality, Mr Andreas Eberhard(Ed.), ISBN: 978-953-307-180-0, InTech, 2011.
[40] Mohan T, Undeland T, and Robbins, W, Power Electronics Converters, Appli-cations and Design, Wiley, 1995.
[41] Bin Wu High Power Converters and AC Drives Wiley, 2006.
[42] A. M. Hava, R.J. Kerkman, T.A Lipo, Simple analytical and graphical methodsfor carrier-based PWM-VSI drives, IEEE Transactions on Power Electronics,Vol. 14, No. 1, pp. 49-61, 1999.
[43] Pinheiro, H.; Botteron, F.; Rech, C.; Schuch, L.; Camargo, R. F.; Hey, H.L.;Grundling, H.A.; Pinheiro, J.R., Space vector modulation for voltage-sourceinverters: a unified approach, IECON 02 Industrial Electronics Society, IEEE2002 28th Annual Conference of the , vol.1, no., pp.23,29 vol.1, 2002.
[44] C. Zhan Four-Wire Dynamic Voltage Restorer Based on a Three-DimensionalVoltage Space Vector PWM Algorithm, IEEE Transactions on Power Electro-nics, vol. 18, no. 4, 2003.
96
[45] Villalva, M.G.; Ruppert, F., E, 3-D space vector PWM for three-leg four-wire vol-tage source inverters, Power Electronics Specialists Conference, 2004. PESC04. 2004 IEEE 35th Annual , vol.5, no., pp.3946,3951 Vol.5, 2004.
[46] D.G. Holmes, T.A.Lipo Pulse Width Modulation for Power Converters: Principleand Practice, New Jersey: IEEE Press, 2003.
[47] M. Routimo and H. Tuusa, LCL type supply filter for active power filter, compa-rison of an active and a passive method for resonance damping, Proc. PowerElectr. Specialists Conf. PESC pp. 2939-2945, 2007.
[48] Liserre, M.; Blaabjerg, F.; Hansen, S., Design and control of an LCL-filter-based three-phase active rectifier, Industry Applications, IEEE Transactionson, vol.41, no.5, pp.1281,1291, 2005.
[49] Biying Ren; Xiangdong Sun; Shaoliang An; Xiangui Cao; Qi Zhang, Analysisand design of an LCL filter for the three-level grid-connected inverter, PowerElectronics and Motion Control Conference (IPEMC), 2012 7th International ,vol.3, no., pp.2023,2027, 2012.
[50] T. C. Green, J. H. Marks, Rating of active power filters, IEEE Pro-Electr.PowerAppl., Vol. 150, No. 5, 2003.
[51] Salcone, M.; Bond, J., Selecting film bus link capacitors for high performanceinverter applications," Electric Machines and Drives Conference, 2009.
[52] ST. Schütze, Design Aspects for Inverters with IGBT High Power Modules,Eupec, 1997.
[53] PSCAD v4.2.1 Manitoba HVDC Research Centre, 2006.
[54] MATLAB R2012a Mathworks Inc. 2012.
[55] I. Kasıkçı, Short Circuits in Power Systems:A Practical Guide to IEC 60909Wiley, 2002.
[56] TMS320F28335 Digital Signal Controllers Data Manual, SPRS439M , TexasInstruments, 2012.
97
ÖZGEÇMIS
Kimlik Bilgileri
Adı Soyadı: Çagın Barıs CENGIZ
Dogum Yeri: Ankara
Medeni Hali: Bekar
E-posta: [email protected]
Adresi: Yeni Batı mahallesi 2026. Sokak D3/3 Batıkent /Yenimahalle / ANKARA
Egitim
Lise: Mamak Anadolu Lisesi, ANKARA
Lisans: Hacettepe Üniversitesi Elektrik ve Elektronik Mühendisligi Bölümü, ANKARA
Yüksek Lisans: Hacettepe Üniversitesi Elektrik ve Elektronik Mühendisligi Bölümü,
ANKARA
Yabancı Dil ve Düzeyi
Ingilizce, Iyi
Is Deneyimi
2011-2014, Endoks Enerji Sistemleri
Deneyim Alanları
Güç Elektronigi, Gömülü Sistemler, Sinyal Isleme
Tezden Üretilmis Projeler ve Bütçesi
-
Tezden Üretilmis Yayınlar
-
Tezden Üretilmis Teblig ve/veya Poster Sunumu ile Katıldıgı Topantılar
-
98





























