Embed Size (px)
Citation preview

DESIGNING FOR SHAPE CHANGE
A Case study on 3D Printing Composite Materials for Responsive Architectures
ELENA VAZQUEZ1, BENAY GURSOY2 and JOSE DUARTE31,2,3The Pennsylvania State University1,2,3{emv10|bug61|jxp400}@psu.edu
Abstract. This paper presents the initial stages of a research thataims to develop hydroactive architectural skin systems that respondto environmental humidity. As part of this study, we have developedwood-based bio-composite materials that are 3D printed with woodfilament. Shape-changing behavior is not predictable in advance. Wedeveloped customized 3D printing protocols to systematically studyshape-changing behavior. The paper presents this systematic materialstudy and the prototypes that we have developed.
Keywords. Smart materials; responsive architecture; 3D printing;material computation.
1. IntroductionSmart materials are designed to adapt and transform in response to environmentalstimulus, reversibly altering their properties. They can act as sensors, actuators,and regulators at the same time, without the need for any additional energyfor mechanical or electronic control. In shape-changing smart materials, astimulus (i.e. heat, water) causes a strain in the material, thus changing itsshape. Over the past years, architects have become increasingly interested in smartmaterials, envisioning lighter, more efficient and adaptable systems. Researchersargue that these materials can be built into responsive building systems toachieve improved performance through their actuation capabilities in responseto shifting environmental conditions (Juaristi et al. 2018). This opens up a newconceptual and practical framework for architects to design “truly environmentallyresponsive” architectural systems (Kretzer 2016).
Incorporating shape-changing materials in the design process, however, hasseveral challenges. The dominant ontological and epistemological frameworksin design usually rely on final products, as opposed to processes of materialformation. Designing with shape-changing materials, on the other hand, isdesigning with the flows and transformations of materials. As pointed out byKennedy (2018), shape-changing transformations take place over time and thebehavior is usually unpredictable in advance. The unpredictability can give way tounexpected discoveries and emergent material outcomes. As designers, in additionto quantifiable properties that are more suitable for exact simulations, we are
Intelligent & Informed, Proceedings of the 24th International Conference of the Association forComputer-Aided Architectural Design Research in Asia (CAADRIA) 2019, Volume 2, 391-400. © 2019and published by the Association for Computer-Aided Architectural Design Research in Asia (CAADRIA),Hong Kong.
392 E. VAZQUEZ, B. GURSOY AND J. DUARTE
interested in sensory aspects that can be discovered through material engagement,such as emergent visual (forms, shapes and textures), and tactile qualities. Thequestion, then, is how to design with this dynamic behavior, and how to havecontrol over it?
In this study, we intend to develop methodologies for designing forshape-change, and propose ways in which a material-based approach can facilitatethe knowledge transfer of shape-changing materials into design fields. We presentthe initial stages of a research to develop a hydroactive architectural skin systemthat responds to the relative humidity in the environment. As part of this study, wehave developed wood-based bio-composite materials by 3D printing with a specialwood filament that is humidity-sensitive. We customized the 3D printing protocolsin order to explore the shape-changing behavior. The shape-changing behavior isnot predictable in advance since the transformation mechanics is defined by thegeometry and printing settings. A systematic material exploration is required tohave control over this behavior. The section below provides a background onbilayer materials in shape changing systems. Afterward, we present a systematicmaterial exploration studying the shape-changing behavior of bilayer compositematerials developed through 3D printing. Finally, we discuss the early prototypesof an architectural skin system.
2. 3D Printing Bilayer Composite Materials2.1. BACKGROUND ON BILAYER COMPOSITE MATERIALS INSHAPE-CHANGING SYSTEMS
Wood, being a natural fiber-reinforced composite, presents hygroscopic properties.There is a considerable amount of studies that explore the use of wood to constructshape-changing systems, including biomimetic building skin designs (Reichert etal., 2014), andwood-based bio-composites used for actuation purposes (LeDuigouet al. 2016). One strategy for leveraging wood’s hygroscopic properties is the useof the bilayer principle. In a bilayer configuration, two tightly bonded layers thathave different swelling coefficients present a bending response when activatedwith humidity or water. Previous studies have used this principle to create, forinstance, autonomous shading devices (Vailati et al. 2018) and large-scalematerialexplorations (Wood et al. 2018). In these studies, manipulating the orientation ofwood-fibers in the bilayer system leads to a designed shape-change.
A similar strategy for creating shape-changing bilayer composites relieson additive manufacturing. The precise control over the tool path geometryand printing settings allows for embedding localized anisotropic behaviors intocomposite materials and lead to shape-change. This strategy has been exploredin manufacturing shape-changing systems using different materials, includinghydrogels (Gladman et al. 2016), and thermoplastics (An et al. 2018). In the caseof wood-based composites, 3D printing enables the design of specific patterns forlayers that lead to differential swelling and then to shape-change. In a recent study,Correa et al. (2015) explore creatingmulti-material wood-based composites by 3Dprinting with wood filament and non-humidity responsive polymers, such as ABSand nylon. They developed custom tool paths to 3D print controlled patterns and

DESIGNING FOR SHAPE CHANGE 393
embed anisotropic behaviour into wood-based composite materials.
2.2. CASE STUDIES
Building on this existing body of work, we developed methodologies to programshape-change using 3D printing, and discuss the mechanisms for controllingthe shape-changing behaviour. In this section, we present case-studies wherewe explore the shape-changing behavior of bilayered composite materials thatwe have developed through 3D printing: 1) a preliminary study to understandthe principles of 3D printing bilayered thermoactive composite materials usingPLA, 2) a study on 3D printing bilayered hydroactive composite materials usinga wood-based filament that is humidity sensitive. In both cases, in order tohave control over the shape-changing behavior, we pursued a systematic materialexploration where we defined the parameters and explored their implications onthe process, and the product systematically and comparatively. Figure 1 presentsthe framework of this material exploration under three main categories: digitalmodel, printing, and activation.
Figure 1. The framework for systematic explorations in 3D printing bilayer compositematerials.
The digital input parameters include the base geometry of the object to be3D printed, and parameters for the custom gcode design. Customizing the gcodeenables having control over the tool path that the 3D printer nozzle follows, hencedefining the print pattern. Controlling the tool path is especially crucial in thisstudy as the print patterns define the fiber orientations and directly affect theshape-changing behavior. We have used Silkworm (a plugin for Grasshopper inRhino) to customize gcodes for 3D printing. Additional parameters that we haveidentified related to the tool path geometry are the total number of print layers,layer height, the order in which active and constraint layers are printed in thebilayer configuration, and the road distance which controls the porosity of the3D printed objects. The 3D printing settings that we control also through customgcode include bed and nozzle temperatures and the 3D printing speeds. Anotherparameter that is in play while 3D printing is the filaments used, and whetherthe objects are printed using a single material or with multiple materials. The

394 E. VAZQUEZ, B. GURSOY AND J. DUARTE
two activators for the 3D printed bilayer composite materials are temperature forthermoactive composites, and humidity for hydroactive composites. The durationin which the 3D printed samples are exposed to these activators also defines theshape-changing behavior.
2.2.1. 3D printing thermoactive bilayer composite materials with PLAIn the preliminary study, we explored 3D printing bilayer composite materialsusing a single material, PLA, by changing print patterns from one layer to thenext. PLA is a shape-memory polymer that, when printed, high temperaturesduring extrusion cause alignment and stretching of the polymer chains along thedirection of extrusion (Van Manen et al., 2017). The rapid cooling of the polymerfilament fixes the temporary shape, and the application of heat triggers the returnof the chains to the original unstretched state. This directional strain that PLAparts exhibit is the material principle that enables shape-change.
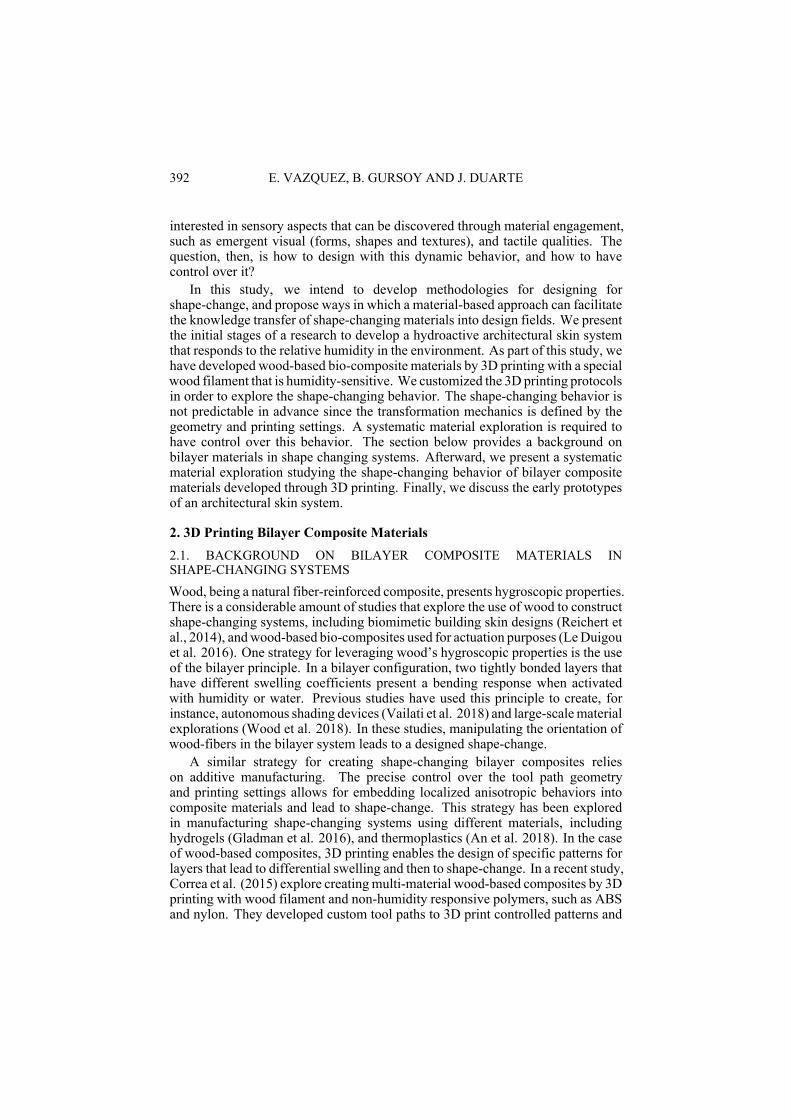
For the first set of explorations, the base geometries are defined as rectanglesof 3 different dimensions: 55 x 55 mm, 85 x 55 mm, and 115 x 55 mm. Figure2 shows a summary of our material explorations. In order to produce bilayercomposites with a single material, the tool path geometry is designed by adjustingprinting patterns per layer to create a differential expansion between layers. Thetotal number of printed layers (4), layer height (0.35mm), road distance (0.70mm),bed temperature (25°C) and nozzle temperature (215°C), as well as the printingspeed (1500 mm/min) are kept constant while exploring with different geometries.Following the work by An et al. (2018), we immersed the 3D printed compositematerials in hot water (80 °C) for the duration of 2 minutes to activate theshape-change.
The distribution of constraint layers (CL) and active layers (AL) in the bilayerconfiguration considerably affect the shape-change. As can be seen in Figure 2,the sample shown in Figure 2-D and and the sample shown in Figure 2-F havethe same base geometry (rectangles of 85x55mm) and total number of layers (4).While in the sample in Figure 2-D all the four layers are printed with the sameangle (90°), in the sample shown in Figure 2-F, the first three layers are printedwith the same angle (90°), and the last layer is printed with a different angle (0°).This last layer acts as a constraint layer when immersed in hot water that triggersthe shape-change. The active layers, on the other hand, define the main directionof curvature as it shrinks along the direction of the print pattern longitudinallywhen heated. Since the sample in Figure 2-D does not have a constraint layer,when heated the entire geometry is affected by thermal expansion and does notbend. The proportions (length to width ratio) of the printed samples also affectthe bending angle, as also noted by (An et al. 2018). The bending angle increasesas the length of the rectangles increase, while the width is kept constant. Thecomparison of samples shown in Figure 2-E and 2-F highlights how the length ofthe rectangles affects the curvature angle when the direction of the print pattern isaligned with the long edge. Also, varying the printing angles with reference to themain geometry leads to complex geometries when activated. The samples shownin Figure 2-B and 2-C have different angles, and when activated one presents asimple single curved shape and the other a hyperbolic paraboloid, respectively.
DESIGNING FOR SHAPE CHANGE 395
Figure 2. Six 3D printed bilayer composite samples of PLA with varying tool path geometryand their response to being immersed in hot water.
2.2.2. 3D printing hydroactive bilayer composite materials with wood filamentThe first set of explorations using PLA set a basis for the next set of explorations on3D printing bilayer wood-based composite materials. This section describes thesecond set of explorations using a commercially available wood filament underthe name of Laywood. As mentioned in Correa et al. (2015), wood filaments aredeveloped by combining different polymers with micro-scale wood fibers. Sincethe wood fibers remain hygroscopically active, the 3D printed objects swell orshrink in response to humidity changes. As specified by the manufacturer ofLaywood, the material composition of Laywood has 40wt% wood fibre, and theobjects that are 3D printed with Laywood can present an elongation rate of 106%when exposed to higher levels of humidity.
In this second set of explorations with Laywood, the base geometries aredefined as isosceles triangles with a base and height of 55mm. The triangulargeometry is kept constant in each sample. Total number of printed layers (4), layerheight (0.35mm), bed temperature (25°C) and nozzle temperature (240°C), as wellas the printing speed (1500 mm/min) are also kept constant. This time, we focusedon exploring the effects of various print patterns (print angles) and road distances(porosity) on the final shape of the activated samples. All the samples have 3 activelayers (AL) and one constraint layer (CL) as can be seen in Figure 3. The numberof AL and CL are defined according to the previous study where we observedmorebending with the 3 AL-1 CL configuration. The samples A and D; B and E; andC and F have the same print angles on the active and constraint layers: 45°/135°; 60°/150°; and 90°/180° respectively with reference to the symmetry axis of theisosceles triangles. While the samples A, B, and C have a road distance of 1.5 mm,the samples D, E and F have a road distance of 1 mm. This makes the samples A,B, and C more porous when 3D printed.

396 E. VAZQUEZ, B. GURSOY AND J. DUARTE
Figure 3. Toolpaths of six bilayer composite samples to be printed with wood filament.
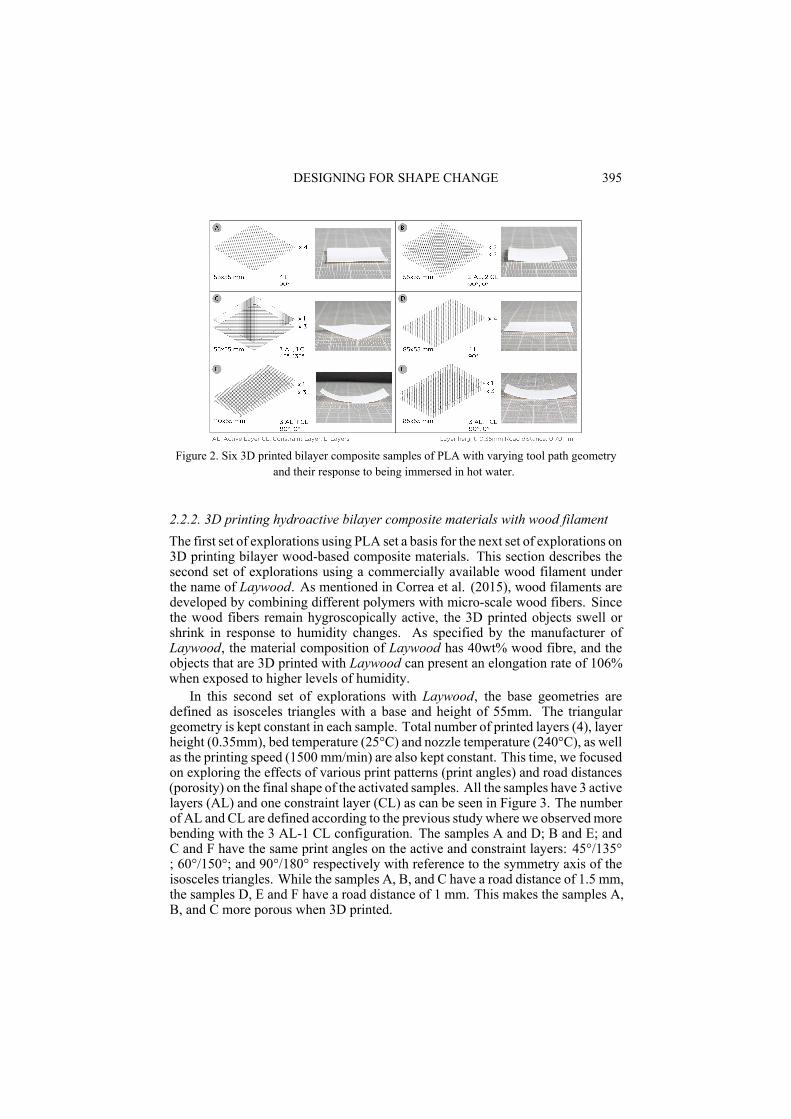
We built a humidity chamber in order to create a controlled environment todocument and capture the shape-change in the samples. We kept the temperaturewithin the humidity chamber constant while increasing the relative humidity levelsup to 100%. We used an ultrasonic cool mist humidifier for this purpose andperiodically captured the shape-changes in the samples. Duration of exposureto the stimulus (i.e. heat, humidity) is a significant parameter affecting theshape-change. While with the previous set of explorations with PLA, the responseof the samples to heat change was almost instant and the samples usually reachedtheir final forms in about 2 minutes, the wood-based composites required longerexposure times to high levels of humidity. Even when the humidity levels withinthe humidity chamber reached the peak point, the shapes of the samples keptchanging as long as the the samples were exposed to humidity. Figure 4 showsthe shape-changes in the 3D printed samples with 10 minute intervals for a totalduration of 40 minutes.
As can be seen in Figure 4, the change in road distance, hence porosity,considerably affects the shape-changing behavior. All the parameters for samplesA andD are the same except road distance: sampleA ismore porous than sample D.Under same relative humidity levels, and over the same duration, the shape-changein sample A is more drastic than the shape-change in sample D. This is also true forsamples C and F: sample C is more porous than sample F, and the transformationis more remarkable. On the other hand, no significant shape-change is observedin sample B. We speculate that this is due to an unexpected outcome of 3Dprinting: the initial print layers melted more than predicted on the heat bed andresulted in thicker lines in the print pattern. This prevented sample B to bend.As we have mentioned as part of the previous set of explorations with PLA, eventhough the base geometry is the same, different print patterns (print angles) resultin different shapes when the samples are activated. The samples extend in thedirection following the print angle of the active layer, and the print angle of theconstraint layer defines the bending direction. The effect of print angles on theshape-change of the activated samples can be observed when samples D, E, and Fare compared. Also, in the first set of explorationswith PLA, the shape-changewasnot reversible once activated, whereas in this second set of explorations with woodfilament the shape-change is partially reversible, mainly due to “mechano-sorptivedegradation” as noted by Le Duigou et al. (2016).
DESIGNING FOR SHAPE CHANGE 397
Figure 4. The shape changes of the six bilayer wood-based bio composite samples with 10minute intervals for a total duration of 40 minutes.
2.3. INITIAL PROTOTYPES FOR HYDROACTIVE ARCHITECTURAL SKINSYSTEMS
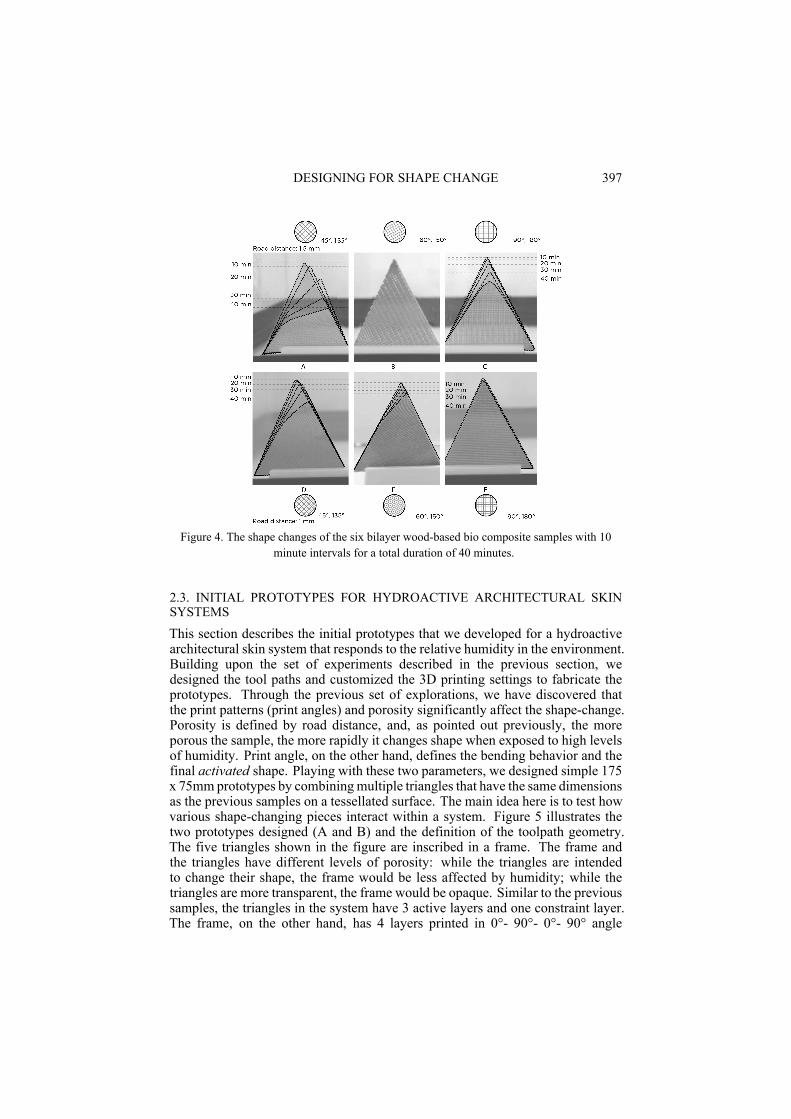
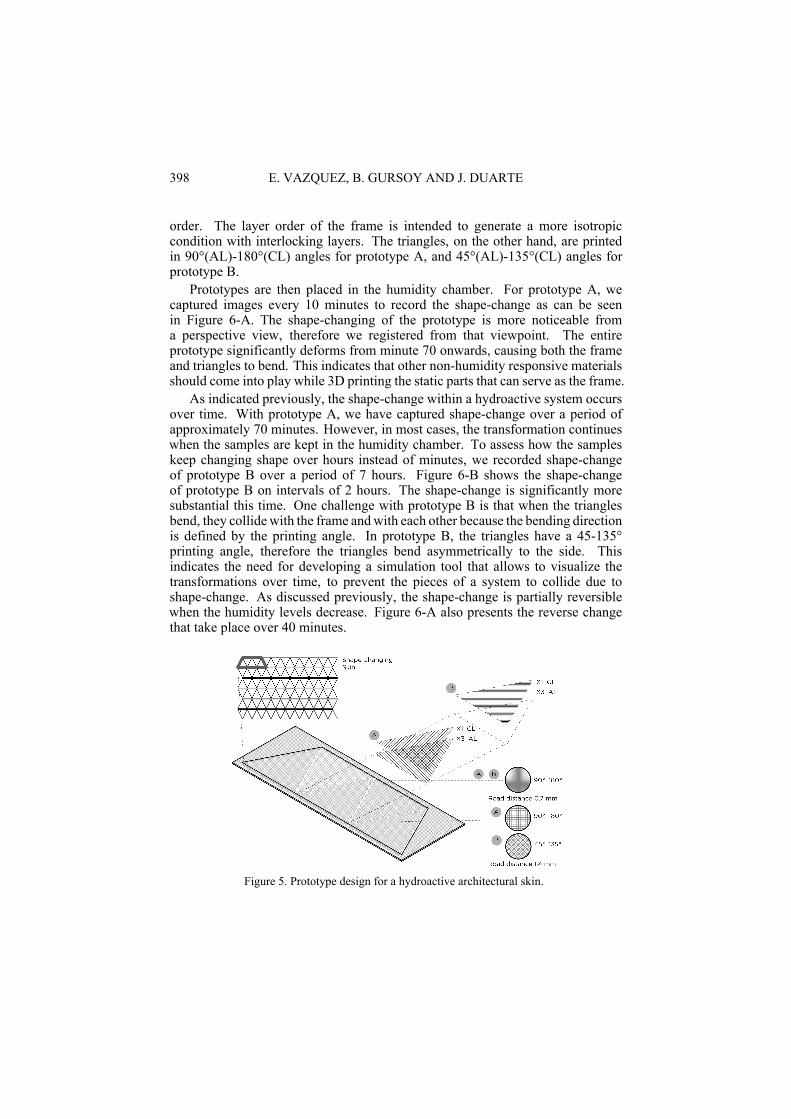
This section describes the initial prototypes that we developed for a hydroactivearchitectural skin system that responds to the relative humidity in the environment.Building upon the set of experiments described in the previous section, wedesigned the tool paths and customized the 3D printing settings to fabricate theprototypes. Through the previous set of explorations, we have discovered thatthe print patterns (print angles) and porosity significantly affect the shape-change.Porosity is defined by road distance, and, as pointed out previously, the moreporous the sample, the more rapidly it changes shape when exposed to high levelsof humidity. Print angle, on the other hand, defines the bending behavior and thefinal activated shape. Playing with these two parameters, we designed simple 175x 75mmprototypes by combiningmultiple triangles that have the same dimensionsas the previous samples on a tessellated surface. The main idea here is to test howvarious shape-changing pieces interact within a system. Figure 5 illustrates thetwo prototypes designed (A and B) and the definition of the toolpath geometry.The five triangles shown in the figure are inscribed in a frame. The frame andthe triangles have different levels of porosity: while the triangles are intendedto change their shape, the frame would be less affected by humidity; while thetriangles are more transparent, the frame would be opaque. Similar to the previoussamples, the triangles in the system have 3 active layers and one constraint layer.The frame, on the other hand, has 4 layers printed in 0°- 90°- 0°- 90° angle
398 E. VAZQUEZ, B. GURSOY AND J. DUARTE
order. The layer order of the frame is intended to generate a more isotropiccondition with interlocking layers. The triangles, on the other hand, are printedin 90°(AL)-180°(CL) angles for prototype A, and 45°(AL)-135°(CL) angles forprototype B.
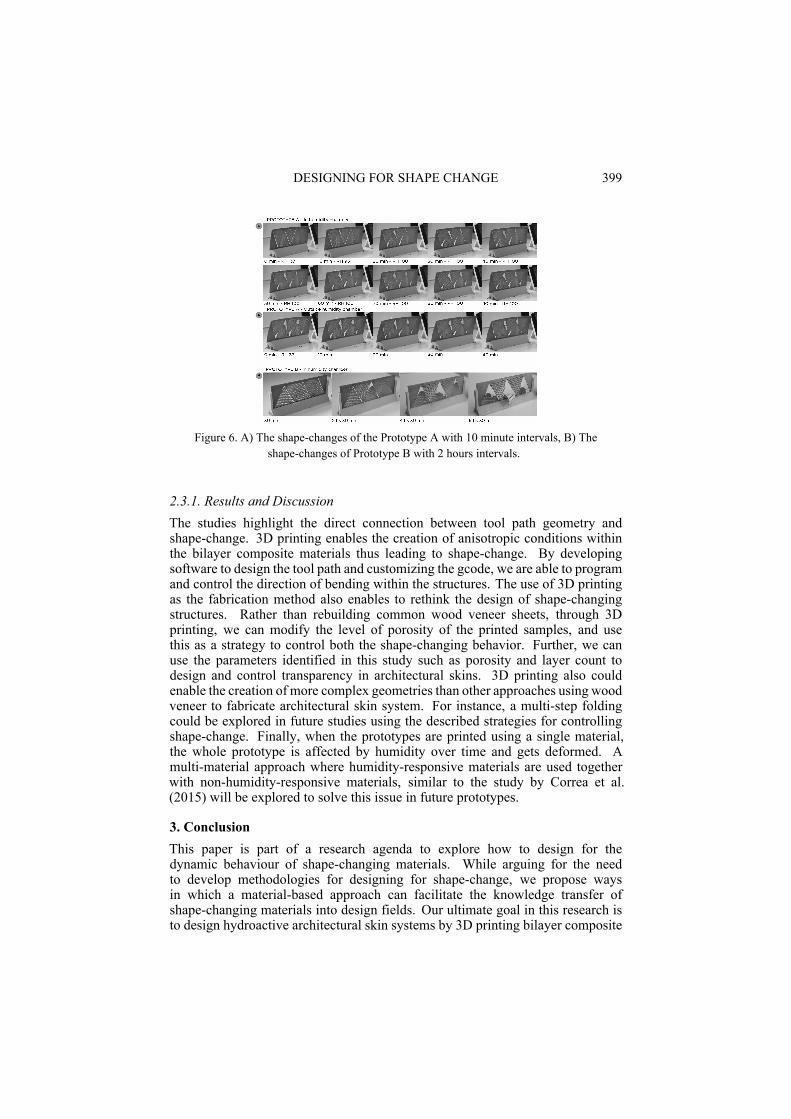
Prototypes are then placed in the humidity chamber. For prototype A, wecaptured images every 10 minutes to record the shape-change as can be seenin Figure 6-A. The shape-changing of the prototype is more noticeable froma perspective view, therefore we registered from that viewpoint. The entireprototype significantly deforms from minute 70 onwards, causing both the frameand triangles to bend. This indicates that other non-humidity responsive materialsshould come into play while 3D printing the static parts that can serve as the frame.
As indicated previously, the shape-change within a hydroactive system occursover time. With prototype A, we have captured shape-change over a period ofapproximately 70 minutes. However, in most cases, the transformation continueswhen the samples are kept in the humidity chamber. To assess how the sampleskeep changing shape over hours instead of minutes, we recorded shape-changeof prototype B over a period of 7 hours. Figure 6-B shows the shape-changeof prototype B on intervals of 2 hours. The shape-change is significantly moresubstantial this time. One challenge with prototype B is that when the trianglesbend, they collide with the frame andwith each other because the bending directionis defined by the printing angle. In prototype B, the triangles have a 45-135°printing angle, therefore the triangles bend asymmetrically to the side. Thisindicates the need for developing a simulation tool that allows to visualize thetransformations over time, to prevent the pieces of a system to collide due toshape-change. As discussed previously, the shape-change is partially reversiblewhen the humidity levels decrease. Figure 6-A also presents the reverse changethat take place over 40 minutes.
Figure 5. Prototype design for a hydroactive architectural skin.
DESIGNING FOR SHAPE CHANGE 399
Figure 6. A) The shape-changes of the Prototype A with 10 minute intervals, B) Theshape-changes of Prototype B with 2 hours intervals.
2.3.1. Results and DiscussionThe studies highlight the direct connection between tool path geometry andshape-change. 3D printing enables the creation of anisotropic conditions withinthe bilayer composite materials thus leading to shape-change. By developingsoftware to design the tool path and customizing the gcode, we are able to programand control the direction of bending within the structures. The use of 3D printingas the fabrication method also enables to rethink the design of shape-changingstructures. Rather than rebuilding common wood veneer sheets, through 3Dprinting, we can modify the level of porosity of the printed samples, and usethis as a strategy to control both the shape-changing behavior. Further, we canuse the parameters identified in this study such as porosity and layer count todesign and control transparency in architectural skins. 3D printing also couldenable the creation of more complex geometries than other approaches using woodveneer to fabricate architectural skin system. For instance, a multi-step foldingcould be explored in future studies using the described strategies for controllingshape-change. Finally, when the prototypes are printed using a single material,the whole prototype is affected by humidity over time and gets deformed. Amulti-material approach where humidity-responsive materials are used togetherwith non-humidity-responsive materials, similar to the study by Correa et al.(2015) will be explored to solve this issue in future prototypes.
3. ConclusionThis paper is part of a research agenda to explore how to design for thedynamic behaviour of shape-changing materials. While arguing for the needto develop methodologies for designing for shape-change, we propose waysin which a material-based approach can facilitate the knowledge transfer ofshape-changing materials into design fields. Our ultimate goal in this research isto design hydroactive architectural skin systems by 3D printing bilayer composite

400 E. VAZQUEZ, B. GURSOY AND J. DUARTE
materials that respond to environmental humidity. This paper reports the earlyprototypes developed towards that goal, and presents a systematic, bottom-upmaterial-based exploration. The approach presented in this paper differs fromother studies for developing responsive materials in that it is centered in howdesign decisions condition the dynamic behavior of shape-changing architectures.In the explorations conducted, design decisions orchestrate the interdependencebetween geometry -from tool path to overall form-, 3d printing settings, and time,as the added dimension in the design process. Time, in this study representsshape transformation, and we argue that a systematic material exploration andcomputation brings us one step closer to controlling this dynamic behavior indesigning for shape-change.
We postulate that once the shape-changing behavior is formalized throughsystematic material explorations, material intelligence can be embedded inparametric computer models. This constitutes a next stage in this research, andcan enable us to explore design variations in the computer prior to materialization.It will also allow us to create computer simulations to assess the performance of thearchitectural skin designs in controlling air flow, daylight and interior temperature.
ReferencesAn, B., Tao, Y., Gu, J., Cheng, T., Chen, X., Zhang, X., Zhao, W., Do, Y., Takahashi, S.,
Wu, H.Y., Zhang, T. and Lining, Y.: 2018, Thermorph: Democratizing 4D Printing ofSelf-Folding Materials and Interfaces, Proceedings of the 2018 CHI Conference on HumanFactors in Computing Systems.
Correa, D., Papadopoulou, A., Guberan, C., Jhaveri, N., Reichert, S., Menges, A. and Tibbits, S.:2015, 3D-PrintedWood: ProgrammingHygroscopicMaterial Transformations, 3DPrintingand Additive Manufacturing 2, 2, 106-116.
Le Duigou, A., Castro, M., Bevan, R. and Martin, N.: 2016, 3D printing of wood fibrebiocomposites: From mechanical to actuation functionality, Materials and Design, 96,106-114.
Gladman, A.S., Matsumoto, E.A., Nuzzo, R.G., Mahadevan, L. and Lewis, J.A.: 2016,Biomimetic 4D printing, Nature materials, 15, 413-419.
Kennedy, S. 2011, Responsive Materials, in S.c.h.r.öp.f.e.r. T (ed.), Material Design, DEGRUYTER, Basel, 118-131.
Kretzer, M.: 2016, Information Materials: Smart Materials for Adaptive Architecture, Springer.Van Manen, T., Janbaz, S. and Zadpoor, A.A.: 2017, Programming 2D/3D shape-shifting with
hobbyist 3D printers,Materials Horizons, 4, 1064-1069.Menges, A. and Reichert, S.: 2012, Material Capacity: Embedded Responsiveness,
Architectural Design, 82, 52-59.Miren, J., Gómez-Acebo, T. and Monge-Barrio, A.: 2018, Qualitative Analysis of Promising
Materials and Technologies for the Design and Evaluation of Climate Adaptive OpaqueFaçades, Building and Environment, 144, 482–501.
Reichert, S., Menges, A. and Correa, D.: 2014, Meteorosensitive architecture: Biomimeticbuilding skins based on materially embedded and hygroscopically enabled responsiveness,CAD Computer Aided Design, 60, 50-69.
Vailati, C., Bachtiar, E., Hass, P., Burgert, I. and Rüggeberg, M.: 2017, An AutonomousShading System Based on Coupled Wood Bilayer Elements, Energy and Buildings, 158,1013-1022.
Wood, D., Vailati, C., Menges, A. and Rüggeberg, M.: 2018, Hygroscopically Actuated WoodElements for Weather Responsive and Self-Forming Building Parts – Facilitating Upscalingand Complex Shape Changes, Construction and Building Materials, 165, 782–791.




























