Embed Size (px)
Citation preview

This is a preprint of a paper intended for publication in a journal or proceedings. Since changes may be made before publication, this preprint should not be cited or reproduced without permission of the author. This document was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, or any of their employees, makes any warranty, expressed or implied, or assumes any legal liability or responsibility for any third party’s use, or the results of such use, of any information, apparatus, product or process disclosed in this report, or represents that its use by such third party would not infringe privately owned rights. The views expressed in this paper are not necessarily those of the United States Government or the sponsoring agency.
INL/CON-07-13363PREPRINT
Development of a High Fidelity System Analysis Code for Generation IV Reactors
ICAPP 2008
Hongbin Zhang Vincent A. Mousseau Haihua Zhao
June 2008

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
Development of a High Fidelity System Analysis Code for Generation IVReactors
Hongbin Zhang, Vincent A. Mousseau and Haihua ZhaoIdaho National Laboratory
P.O. Box 1625, Idaho Falls, ID 83415-3870, USATel: +1(208)526-9511, Fax: +1(208)526-8426, Email: [email protected]
Abstract – The current generation of reactor safety simulation codes such as RELAP and TRACare relatively old (approx. 30 years). These codes have been extensively validated for the existingreactors. However, for the advanced reactor designs such as sodium cooled fast reactors(SFR),very high temperature reactors (VHTR) and liquid salt cooled reactors, which tend to haveslow and long transients (relative to LWRs) resulting from passive safety features, the performanceof these codes is questionable. At INL, we have launched an effort to develop a code namedSARAH (Safety Analysis for Reactor Applications with High fidelity) by incorporating theimprovements in physical models, numerical methods, software engineering and computerhardware over the last 30 years. The near term applications of SARAH are for SFRs and the codewill be extended to VHTRs and LWRs applications in the future. This will be accomplished byemploying modern parallel solution algorithms and producing a simulation capability that issecond order accurate in space and time. Modern nuclear reactor simulations that incorporatebetter physics and improved numeric methods and modern software engineering will providebetter predictability to improve safety analysis and to reduce excessive conservativeness in reactordesigns.
I. INTRODUCTION
Physics in a nuclear reactor is a complicated mixtureof multiple physical phenomena. The accurate reactorsafety evaluation requires integrated analyses involvingneutronics, fluid thermal hydraulics, fuel heat conduction,and fuel structural mechanics. Integrated multiphysicscomputational tools are necessary to simulate theseinterrelated phenomena. Traditional nuclear reactor systemsimulators such as RELAP1,2, TRAC3, employ a loosely-coupled operator split algorithm. When these codes wereoriginally developed in the 1970s, computers wereexpensive, slow and had small memories and hence fastrunning operator split method had to be used. In thisapproach, each of the physics (fluid flow, heat conductionand neutron diffusion) is solved separately and the couplingterms are done explicitly. With explicit coupling, the valuesof some of the variables at new time step are calculatedbased on variables or closure models available at old timestep. Changing the nonlinear coupling between physicalprocesses makes the problem easier to solvecomputationally, but it introduces truncation errors into thesimulation4. These truncation errors affect the physics ofthe problem. This loosely coupled approach limits accuracyto first order in time and space at best. This method also
yields low efficiency since the explicit coupling imposesstability restrictions on the time step size. In addition, somephysical models in these codes are also out of date. Thefirst example is the two-phase flow model which is ill-posed. This means that the partial differential equationsthat describe the physics do not have a unique solution. Thecodes rely on numerical diffusion from their first orderaccurate in space discretization to regularize the solution.This prevents modern 2nd order in space methods frombeing employed since they do not have enough “error” tokeep the solution regularized. The second example is theflow regime maps which are based on steady state and fullydeveloped flow assumptions. In fluid flow modeling thereare physics that are resolved by the temporal and spatialdiscretization and subgrid physics (too small or fast) whichare not resolved by the grid. The subgrid physics ismodeled by closure relations. Even though the subgridphysics is not resolved they still have physical length scalesand time scales. The steady state and fully developedassumptions in current flow regime maps remove theselength and time scales. This results in physics that arediscontinuous in space and time. These discontinuitiesprevent numerical methods from being more than firstorder in space and time.

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
Due to the limited funding in the past two decades,reactor system simulation codes have not evolved muchfrom the perspectives of numerical techniques, fundamentalphysical models, and software engineering. It should benoted that although current simulation codes contain manyquestionable models and assumptions, they perform well ofsimulating existing nuclear reactors. There are two reasonsthat kept these first order accurate methods applicable tothe existing reactors. The first reason is that the existingLWR reactors were designed to have short transients.Hence the error accumulation during the course of atransient has not been significant. The second reason wasthe availability of large amount of experimental data. Thesesimulation codes have been “tuned” based on largeexperimental data sets. For example, if a numerical methodor physical model causes a pressure drop to be larger thanis measured experimentally, the simulation input can bemodified to lower the pressure drop until it matches theexperiment. Therefore, if there is a large experimental dataset that covers the state space that the reactor will operatein, and the simulation code has been “tuned” for thatapplication, the simulation will match the reactor behavior.However, the tuning process generates compensatingerrors, which limit the applicability of the code to adifferent set of requirements or designs5. The semi-implicittime integration employed by existing codes contains aCFL (Courant Friedricks and Lewy) stability limit.Therefore, the time step size is limited by stability ratherthan accuracy and consequently makes the codes slowrunning. This weakness is further exacerbated whenapplying these codes to new nuclear reactor designs such asSFR or VHTR designs which tend to have slow and longlasting transients (relative to Gen-II or Gen-III LWRs)resulting from passive safety systems.
For advanced reactor designs, there usually does notexist a large experimental data base that covers theiroperation like the over billion dollars investment in largescale integral experiments performed at INL site severaldecades ago for the existing LWRs. The predictability ofutilizing existing simulation tools with loosely coupledapproaches is questionable. For example, sodium cooledfast reactors have compact core geometry coupled with thelong neutron mean free path, which result in a much higherneutron leakage fraction than that for a typical commerciallight water reactor. This high leakage fraction implies thatthe reactivity effect impacts the reactor as a whole ratherthan locally for a LWR and the reactor reactivity issensitive to small geometric changes. As the temperatureincreases causing materials to expand, negative reactivityfeedback is inherently introduced. Conversely, positivereactivity is introduced as the temperature decreases. Thistype of tightly coupled system requires tightly coupledmultiphysics simulation with high fidelity predictability.Reactor system simulation tools which utilize modern
numerical methods, that have high temporal and spatialaccuracy (and quantifiable uncertainty), and better physicalmodels, that have realistic physical length scales and timescales, can be used to predict the reactor behavior whereexperimental data does not exist. Due to the exponentialgrowth of computer speed and memory while the price heldaffordable and the rapidly growing cost of conductingexperiments, high fidelity simulations are becomingincreasingly important for advanced reactors. Thisrequirement for predictability is the motivation for a largescale overhaul of all of the models and assumptions intransient nuclear reactor safety simulation software.
At Idaho National Laboratory, we have launched aneffort to simultaneously address the main obstacles in theexisting nuclear reactor simulation codes. Over the past fewdecades, significant progress has been made to developinnovative fully coupled algorithms for solving the partialdifferential equations describing strongly coupled andcomplex phenomena. These new algorithms provide amechanism to remove operator splitting and to allow thecoupled equations to be solved implicitly to improveaccuracy and efficiency6-14. In addition, the nonlinearsolution software packages such as PETSc (Portable,Extensible Toolkit for Scientific Computation)15 are readilyavailable for free. These algorithms and scalable softwarepackages will be utilized to facilitate the developmentaleffort. Modern well posed two-phase flow models willallow the employment of more accurate spatialdiscretization. Improved closure models that includephysically realistic length scales and time scales willimprove the physical model accuracy as well as the spatialand temporal accuracy. Our long term objective for thiseffort is to develop a high fidelity system analysis codenamed SARAH (Safety Analysis for Reactor Applicationswith High fidelity) that employs modern physical models,numerical methods, and computer science for transientsafety analysis of generation IV nuclear reactors.
This paper provides an overview of the developmentaleffort. The current status of the development effort as wellas some results from analyzing a simplified primary systemof a conventional pool type sodium cooled fast reactor16
will be presented. Various simplified transient analyses areperformed with this simplified SFR model to study twofundamental issues related to system analysis codes –accuracy of numeric algorithm and efficiency from theperspective of CPU time needed to achieve the same levelof accuracy.
II. SARAH DEVELOPMENT CONSIDERATIONS
In order to have a successful development of theSARAH project, three broad areas will be addressed –software engineering, physical modeling and numeric
Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
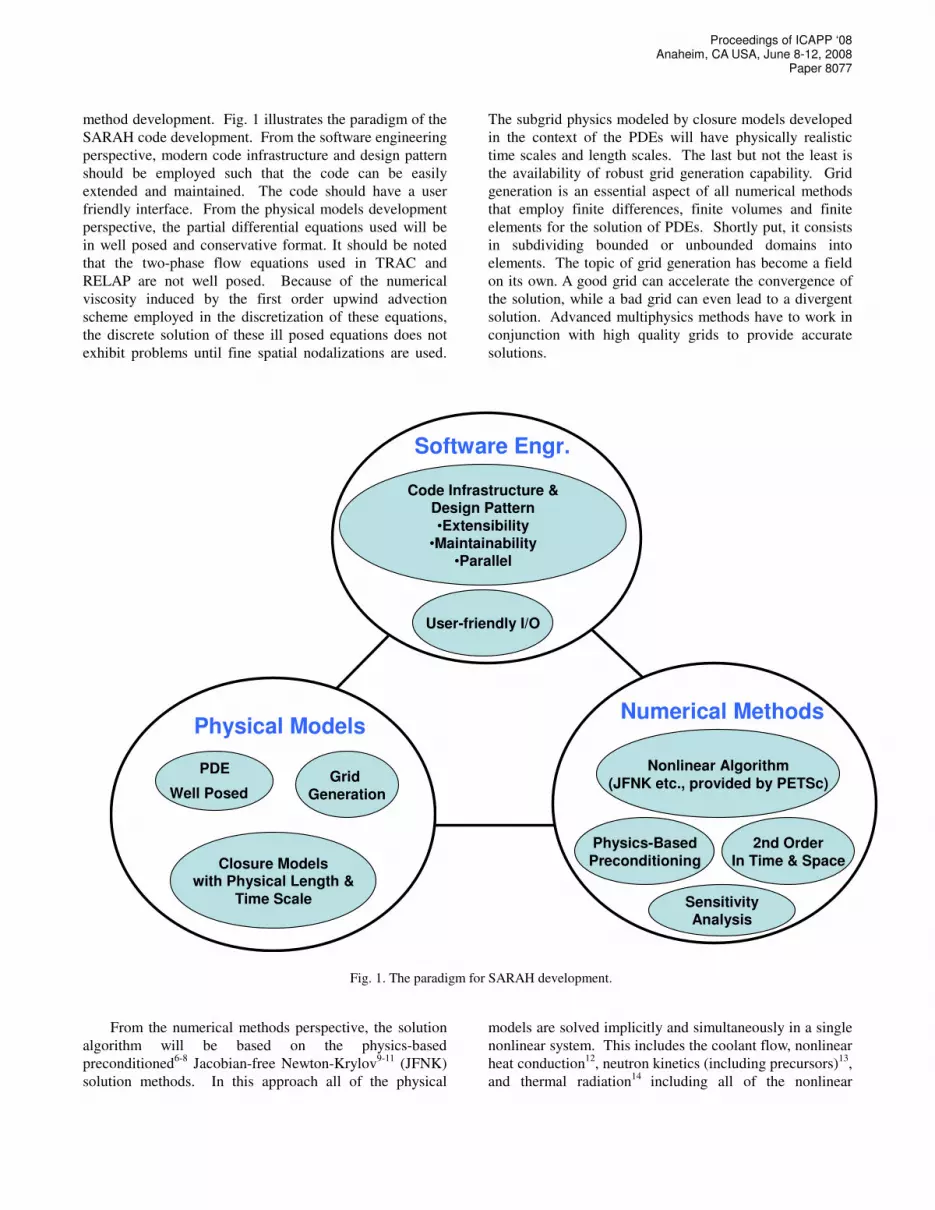
method development. Fig. 1 illustrates the paradigm of theSARAH code development. From the software engineeringperspective, modern code infrastructure and design patternshould be employed such that the code can be easilyextended and maintained. The code should have a userfriendly interface. From the physical models developmentperspective, the partial differential equations used will bein well posed and conservative format. It should be notedthat the two-phase flow equations used in TRAC andRELAP are not well posed. Because of the numericalviscosity induced by the first order upwind advectionscheme employed in the discretization of these equations,the discrete solution of these ill posed equations does notexhibit problems until fine spatial nodalizations are used.
The subgrid physics modeled by closure models developedin the context of the PDEs will have physically realistictime scales and length scales. The last but not the least isthe availability of robust grid generation capability. Gridgeneration is an essential aspect of all numerical methodsthat employ finite differences, finite volumes and finiteelements for the solution of PDEs. Shortly put, it consistsin subdividing bounded or unbounded domains intoelements. The topic of grid generation has become a fieldon its own. A good grid can accelerate the convergence ofthe solution, while a bad grid can even lead to a divergentsolution. Advanced multiphysics methods have to work inconjunction with high quality grids to provide accuratesolutions.
Physical Models
Code Infrastructure &Design Pattern•Extensibility
•Maintainability•Parallel
User-friendly I/O
Closure Modelswith Physical Length &
Time Scale
GridGeneration
Nonlinear Algorithm(JFNK etc., provided by PETSc)
2nd OrderIn Time & Space
Software Engr.
Numerical Methods
PDE
Well Posed
Physics-BasedPreconditioning
SensitivityAnalysis
Fig. 1. The paradigm for SARAH development.
From the numerical methods perspective, the solutionalgorithm will be based on the physics-basedpreconditioned6-8 Jacobian-free Newton-Krylov9-11 (JFNK)solution methods. In this approach all of the physical
models are solved implicitly and simultaneously in a singlenonlinear system. This includes the coolant flow, nonlinearheat conduction12, neutron kinetics (including precursors)13,and thermal radiation14 including all of the nonlinear

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
coupling mechanism such as conjugate heat transfer andneutron cross section feedback mechanisms. Includingmodern physical models and accurate space and timediscretizations will allow this code to be 2nd order accuratein space and time. The JFNK nonlinear solver algorithmprovided by PETSc will be utilized. PETSc is a versatilenonlinear solver library developed at Argonne NationalLaboratory, which provides object-oriented data structuresand solvers for scalable scientific computation on parallelcomputers. PETSc provides algorithms that compute theJFNK matrix-vector product within its Krylov solvers. Thelibrary is extremely flexible and extensible providing datastructures for user-defined algorithms such as physics-based preconditioning, which is easily instrumented withinthe PETSc preconditioning shell. The JFNK algorithm willbe accelerated with the adaptation of the physics-basedpreconditioning. The spatial accuracy and the temporalaccuracy of the discretized from of the PDEs will be 2ndorder accurate. Highly efficient sensitivity analysis will beobtainable with the problem solutions17.
III. BRIEF REVIEW OF JFNK METHOD ANDPHYSICS-BASED PRECONDITIONING
The JFNK method is an efficient method to solve non-linear equations. It is a nested iteration method consistingof four levels. The outermost level is the implicit timestepping with time steps chosen to accurately simulate thetransients. Within the time stepping level are multipleNewton iterations (nonlinear solver) required to convergenonlinearities and these iterations are building up Kryloviterations (linear solver) out of which each Newtoncorrection is drawn. The overall efficiency of the JFNKmethod is dominated by the convergence rate of the Kryloviterations. Interior to the Krylov iteration, a preconditioneris usually implemented to accelerate the convergence rateof the Krylov iteration.
Over the past decade, application of JFNK method hasbeen investigated to solve fully coupled system ofequations. First introduced by Brown and Saad18 in 1994,the JFNK algorithm avoids the explicit computation andstorage of the Jacobian matrix used in the Newton’s methodto solve a coupled nonlinear system of equations through anumerical approximation of the Jacobian matrix and aKrylov vector product performed within iterative Krylovsolvers. By eliminating the need to compute and store anexplicit Jacobian matrix, the algorithm providescomputational savings both in memory and computationaltime. The technique has gained popularity within thenumerical methods development community, particularly inmodels simulating coupled nonlinear multiphysicsproblems. The following part presents a brief overview ofthe JFNK methodology and physics-based preconditioning.
Let us consider a set of implicitly time discretizednonlinear system of equations of the form
0)( =xf (1)
where f represents a vector valued function of nonlinearresiduals for the conservation equations, such asconservation of mass, momentum, energy, and neutrondiffusion etc., and x represents a vector containing all ofthe state variables such as density, momentum, energy,temperature and neutron fluxes, etc..
Tni fffff },...,,...,,{ 21= (2)
Tni xxxxx },...,...,,{ 21= (3)
where i represents the component index. ApplyingNewton’s method to solve this nonlinear system iterativelyinvolves solving a sequence of linearized problems definedby
)(1 kkk xfxJ −=+δ (4)
where J represents the Jacobian matrix, the superscript k isthe Newton iteration index, �xk+1 is the update vector and�xk+1 = xk+1 – xk. The (i,j)th element (ith row, jth column)of the Jacobian matrix is the derivative of the ith equation(fi) with respect to the jth variable (xj). A Jacobian matrix isgenerated by computing derivatives of the function withrespect to all degrees of freedom
j
iji x
fJ
∂∂=, (5)
Finding each element of the Jacobian matrix can beboth error-prone and time consuming process for manyproblems. Eq. (4) is solved for �xk+1 and the new Newtoniteration value for vector x is then computed from
11 ++ += kkk xdxx δ (6)
where d is a damping parameter that is computed to keepthe components of x in physically realizable space and thesame damping value is applied to all of the updates. Thestate variables are updated and the residuals arerecalculated. This iterative process continues until eitherthe norm of the nonlinear residuals or the �x vector is lessthan a specified tolerance. The linear system of equations(Eq. 4) is then solved using an iterative Krylov solver suchas GMRES19. The GMRES (Generalized MinimumRESidual) method, introduced by Saad and Schultz, is apopular and efficient Krylov subspace method used tosolve nonsymmetric system of equations. The GMRES

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
algorithm generates a sequence of orthogonal vectors, andbecause the matrix being inverted is not symmetric, shortrecurrence relations cannot be used as in the case of theConjugate Gradient algorithm20. Instead, all previouslycomputed vectors in the orthogonal sequence have to beretained. One matrix-vector product is required per Kryloviteration, as in
Jvw = (7)
With JFNK, the Jacobian-vector product in Eq. (7) isapproximated through a perturbation or finite differencingof the residuals in the direction of the Krylov vector
εε )()( xfvxf
Jv−+≈ (8)
Where � is a small parameter used to control themagnitude of perturbation. The matrix-free approximationintroduced in Eq. (8) is used to create the Jacobian-freeframework. Detailed information on the exact numericalgorithm and implementation of GMRES in the JFNKframework as well as the optimal equation for choosing theperturbation parameter � has been shown in reference 12.
JFNK has several advantages, including avoiding theexpensive operation of computing and storing the Jacobianmatrix. In addition, the numerical approximation preventsprogramming or coding errors often introduced bycomputing derivatives analytically to generate the Jacobianmatrix. However JFNK is often slower for solutionsrequiring a large number of Krylov iterations per Newtoniteration since repeated evaluation of the perturbedresiduals becomes more expensive than processing theJacobian matrix. Therefore, to fully realize the benefit ofJFNK, it must be combined with efficient preconditioningto reduce the number of Krylov iterations per Newtoniteration. This minimization of the Krylov iterations can beaccomplished by right preconditioning the linear system
)(11 kkk xfxPPJ −=+− δ (9)
Where P is the linear preconditioning process. Thesolution of this system can be divided into two steps byfirst solving the system
)(1 kk xfsPJ −=− (10)
for s, where s=P�xk+1, and then back-solving to obtain�xk+1 from the equation
sxP k =+1δ (11)
With respect to a Krylov solver such as GMRES, anideally preconditioned matrix (P-1J or J-1P) is the one thatis close to normal and whose eigenvalues are tightlyclustered around some point away from the origin21.Obviously if P=J, the preconditioned matrix would be theidentity matrix and GMRES would converge in a singleiteration. However, although P should be a goodapproximation to J, the cost of constructing P should beminimal and solving the system
)(xfxP −=δ (12)
should be much easier than solving the original system.Therefore, P should be a simplified approximation to J.The traditional approach to preconditioning is to constructthe preconditioning matrix P which approximates theJacobian matrix J and then compute P-1 in a fast manner.
An efficient preconditioning technique has beendeveloped called “physics-based” preconditioning based onthe recognition that there exist numerous operator splitmethods to solve non-linear equations. These methods,though fast but inaccurate, do provide some insights intothe time scales or physical behavior of the problem. Thesetraditional methods can be coupled to an accurate methodsuch as JFNK to provide a hybrid method that is fast andaccurate. The traditional operator split method such asRELAP used, which has problems with stability andaccuracy, can be used to provide a good estimate of thesolution. The JFNK method, in turn, can converge to thecorrect solution with a small amount of computationalwork. Detailed discussion of physics based preconditioningcan be found in references 6, 7, 8 and 12.
IV. DYNAMIC TIME STEP CONTROL
The appropriate time steps used in the solutionmethods should resolve the dynamic timescales of thephysics in the problem10. Since the timescales in theproblem are changing as the problem is evolving over time,an efficient algorithm would adjust the time step to adapt tothe changing dynamic timescales. That means short timesteps should be taken when the problem is changing rapidlywhile large time steps be taken when the problem ischanging slowly.
In order for the traditional operator split approacheswhich use semi-implicit solutions to be numerically stable,the time step is constrained by the material Courant limit.The material Courant limit dictates that in order to achievenumerical stability, a particle of fluid may not pass througha calculational cell during a single time step. This leads to acertain maximum time step size that can be used in the

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
simulations. The weakness of this type of time step controlis that it does not consider the varying timescales of thestate variables in the problem except for the velocity. Timesteps dictated by the material Courant limit may be muchsmaller or much larger than those required to capture thetimescales of the physics in the problem resulting inexcessive computation or inaccurate results respectively.
Because of the fully implicit nature in JFNKmethodology, there is no numerical stability limit andconsequently the time step sizes can be determined basedon the rate at which state variables change and the errorcontrol. The time step used here is called dynamical timestep size control. The dynamical time scales for a genericstate variable � is given by
1)1
( −
∂∂=
t
θθ
τ (13)
For a system that contains multiple equations inmultiple variables and in multiple control volumes, adynamical time scale is computed for each variable in eachcontrol volume. The time step is then based on theminimum of all the dynamical time scales for all controlvolumes.
The dynamical time scale for each variable in eachcontrol volume is given by
1
11 )(5.0
−
−+
−Δ+= nn
nnnn t
θθθθτ (14)
Taking the minimum across all control volumes and allvariables, we obtain
],min[ 11 nnn tt Δ=Δ ++ ατ (15)
where � controls the maximum rate at which the time stepis allowed to grow.
V. A SIMPLIFIED SFR MODEL ANALYSIS
In this section, the analysis results for a simplified SFRprimary system model of are presented as an example ofthe SARAH application. The efficiency and accuracy(efficacy) studies were performed to highlight theimportance and necessity of developing high fidelityreactor system safety analysis.
Fig. 2 provides a schematic view of the simplifiedprimary system of a typical pool type SFR. This simplifiedmodel only considers the reactor core, the hot pool,
intermediate heat exchangers (IHX), primary pumps andthe cold pool. For the results present below, the IHX andthe reactor core are modeled as one-dimensionalcomponents. The hot pool and the cold pool are modeledas zero dimensional components.
Fig. 2. Schematics of the simplified primary system of a pooltype SFR.
Isothermal transients were run with the 1st and 2ndorder method and various time steps for the above model,where the cold pool level is set lower than the hot poollevel as illustrated in Fig. 2, with the wall friction set equalto zero and the pump model turning off. Fig. 3 plotted thecold pool level calculated with the 1st order in time methodwith time steps of 1/2 second and 1/16 second and 2ndorder in time method with time step of 1/2 second. Thefirst order method results were plotted in green while thesecond order method results in red. During the transient,the sodium flows from the hot pool to the cold pool andthen back to the hot pool. Since there is no friction and noenergy source or sink, the total energy of the system isconserved. The level of the hot pool and the cold poolkeeps oscillating and the oscillation does not damp (similarto the manometer problem in RELAP developmental

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
assessment and the U-tube developmental assessmentproblem in TRAC). As shown in Fig. 3, the 2nd ordermethod preserves the magnitude of the cold pool levelwhile the 1st order method damps that. Clearly the secondorder method provides a more accurate solution, though thefirst order method becomes more accurate when the timestep is made smaller (the 1/2 second case shown by squaresymbols versus the 1/16 second case shown by circles).Very small time steps have to be taken in order for the 1storder method to match the same accuracy with the 2ndorder method with much bigger time steps. For the hightemperature gas cooled reactor with which transients couldlast up to two weeks, the operator split codes could havesignificant accumulated errors.
Fig. 3. Cold pool level as a function of time with 1st & 2ndorder methods.
The cause of this problem is shown in Fig. 4 where thetotal energy (kinetic plus potential) of the system is plotted.Without friction, the potential energy is converted tokinetic energy and then back to potential energy like apendulum. Here one can see that the 2nd order in timemethod conserves the total energy of the system while the1st order in time method removes energy from the systemdue to the truncation error. The larger time step resultsbigger truncation error for the 1st order in time method andconsequently renders the energy loss at faster rate. Thissimple test problem from the simplified primary systemmodel of a SFR clearly demonstrates the importance ofhaving high order accuracy simulation for nuclear reactorsimulation. It is sometimes argued that inaccuracy in simpletest problems (with no friction and total energy isconserved) does not imply inaccuracy in a “real” problem(with friction).
Fig. 4. Total energy of the system versus time with the1st and 2nd order methods.
Transients with 1st order and 2nd order methods wererun for the same model that includes friction at fixed timestep of ½ second. The system total energy with andwithout friction is shown in Fig. 5. Here the frictionresults are in dashed lines and the no friction results aresolid lines. The difference between the solid red line andthe dashed red line is due to the physical dampingcalculated with 2nd order in time method resulted from theadded friction term. However, the 1st order in time methodcalculated much smaller physical damping effect as shownby the solid and dashed green lines. One can see that thenumerical (truncation) error introduced by the first ordermethod dominates the physical damping in the problem.The 1st method generates results that are not sensitive tothe friction variations. The commonly used uncertaintyquantification method is the “black box” approach, withwhich a large number of cases have to be run. Large timesteps have to be taken in order to get the cases run atreasonable amount of time. The results may fall into thedomain that is discussed here in which the “unphysical”numerical (truncation) error has become the dominantphysics in the transient. This implies that if uncertaintyquantifications were to be performed with the “black box”approach using a traditional operator split code, misleadingresults could be obtained. Conversely, the 2nd order intime method has very small numerical error and correctlycaptures the physical damping effect. Hence, meaningfuluncertainty quantifications can be performed with a 2ndorder accurate method.
Another point to be made with Fig. 5 is that it is anexample of where “tuning” comes in. The first ordernumerical error had the same effect as making the friction

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
larger. Therefore to match data with the first order methodone has to lower the correct friction and produce acompensating error. However, if a test problem has noanalytical solution or experimental data, one does not knowhow to “tune” the model.
Fig. 5. Total energy of the system versus time with andwithout friction.
The above accuracy studies carried out by comparingthe second order method with the first order method showthat numerical errors in the first order method are large andit is very difficult to distinguish numerical errors fromphysical modeling errors. On the other hand, second ordermethod yields small numerical errors and it is very easy tospot physical modeling errors. Therefore, having secondorder method enables us to focus more on better physicalmodeling to provide accurate predicative simulationcapability.
The previous studies addressed accuracy issueassociated with reactor system analysis and the followingstudies will address the efficiency issue. As discussedabove, the operator split method used in the currentgeneration of nuclear reactor simulation tools reduces theaccuracy to first order in time but also introduces stabilityrestrictions caused by the explicit coupling. A goodexample of this is the semi-implicit method employed byRELAP. In this method the pressure gradient in themomentum equation, is operator split from the advectionterm which results in a stability limit that requires that aparticle of fluid cannot cross a control volume in a singletime step (the CFL stability limit).
The efficiency study was carried out in the nextsimulation with the wall friction turned on and the pump
model enabled. The transient starts with an initial leveldifference of two meters between the cold pool and hotpool, with a constant pump head of one meter.
Fig. 6. Total energy of the system versus time with andwithout friction.
The pool levels as a function of time are shown in Fig.6. Note that this is a log-linear plot and that time islogarithmic and level is linear. Here one can see the levelscoming to a new equilibrium as the pump head levels off atone meter.
Fig. 7. Comparison of the dynamic time step and thetime step according to the CFL stability.

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
The time steps for the fully implicit solution methodand the CFL stability limit method are compared. The timestep for the transient shown in Fig. 6 is given in Fig. 7.Here one can see that the fully coupled, implicit methodcan run time steps 10,000 times larger (shown in red) thanthe stability based time step required by operator splitcodes (shown in green). Note here that both time and time-step are on a logarithmic scale. The dynamic time stepsused in a fully implicit method adjusts the time step toresolve the time scales during the various stages of a longlasting transient. This will make a computer code based onfully implicit methods run more efficiently than a CFLstability limit method code like RELAP, in which a particleof fluid cannot cross a control volume in a single time step.
VI. CONCLUSIONS
We have launched an effort to develop a systemanalysis code with high fidelity for advanced Gen-IVreactors at INL, starting from SFR and will be extended toVHTR and advanced LWRs in the future. The newdevelopmental effort will incorporate state-of-the-artnumerical methods, physical models and computingtechnology. The example problems shown in this paperdemonstrated the importance of high fidelity simulation toprovide accurate predicative simulation for sodium cooledreactors. Much more efforts are needed to realize theSARAH goals and make it applicable to safety analyses foradvanced reactor systems.
ACKNOWLEDGMENTS
This work was supported through INL LaboratoryDirected Research and Development program under DOEIdaho Operations Office Contract DE-AC07-05ID14517.
ACRONYMS
CFL – the Courant Friedricks and Lewy limitGMRES – Generalized Minimal RESidual algorithmIHX – Intermediate Heat ExchangerJFNK – Jacobian-free Newton-Krylov methodPDE – Partial Differential EquationPETSc – Portable, Extensible Toolkit for Scientific
ComputationSARAH – Safety Analysis for Reactor Applications with
High fidelitySFR – Sodium cooled fast reactorVHTR – Very High Temperature Reactor
REFERENCES
1. US Nuclear Regulatory Commission, Office ofNuclear Regulatory Research, Washington, DC 20555-
0001, RELAP5/MOD3.3 Code Manual Volume I:Code Structure, Systems Models, and SolutionMethods, NUREG/CR-5535 Edition (December2001).
2. Idaho National Engineering and EnvironmentalLaboratory, RELAP5-3D Code Manual Volume I:Code Structure, Systems Models, and SolutionMethods, INEEL-EXT-98-00834 Rev. 2.0 Edition(July 2002).
3. US Nuclear Regulatory Commission, Office ofNuclear Regulatory Research, Washington, DC 20555-0001, TRAC-M/FORTRAN 90 (Version 3.0) TheoryManual, NUREG/CR-6724 Edition (April 2001).
4. V. Mousseau, “Accurate Solution of the NonlinearPartial Differential Equations from ThermalHydraulics”, Nuclear Technology, 158, pp. 1-10,(2007).
5. N. Zuber, “The Effects of Complexity, of Simplicityand of Scaling in Thermal-Hydraulics”, NuclearEngineering and Design, 204, pp. 1-27, (2001).
6. V.A. Mousseau, D.A. Knoll, and W.J. Rider, “Physics-based Preconditioning and the Newton-Krylov Methodfor Nonequilibrium Radiation Diffusion,” Journal ofComputational Physics, Vol. 160, pp. 743-765, (2000).
7. V.A. Mousseau and D.A. Knoll, “New Physics-basedpreconditioning of Implicit Methods forNonequilibrium Radiation Diffusion,” Journal ofComputational Physics, Vol. 190, pp. 104-132, (2004).
8. J.M. Reisner, V.A. Mousseau, A.A. Wyszogrodzki, andD.A. Knoll, “A Fully Implicit Hurricane Model withPhysics-based Preconditioning,” Monthly WeatherReview, Vol. 133, pp. 1003-1022, (2005).
9. D.A. Knoll and D.E. Keyes, “Jacobian-free Newton-Krylov Methods: A Survey of Approaches andApplications,” Journal of Computational Physics, Vol.193, pp. 357-397, (2004).
10. D.A. Knoll, L. Chacon, L.G. Margolin, and V.A.Mousseau, “On balanced approximations for timeintegration of multiple time scales systems,” Journal ofComputational Physics, Vol. 185, pp.583-611, (2003).
11. D.A. Knoll, V.A. Mousseau, L. Chacon, and J.M.Reisner, “Jacobian-Free Newton-Krylov Methods forthe Accurate Time Integration of Stiff Wave Systems,”Journal of Scientific Computing, Vol. 25, pp. 213-230,(2005).

Proceedings of ICAPP ‘08Anaheim, CA USA, June 8-12, 2008
Paper 8077
12. V.A. Mousseau, “Implicitly balanced solution of thetwo-phase flow equations coupled to nonlinear heatconduction,” Journal of Computational Physics, Vol.200, pp.104-132, (2004).
13. V.A. Mousseau, “A fully implicit, second order in time,simulation of a nuclear reactor core,” Proceedings ofICONE 14, July 17-20, Miami, Florida, (2006).
14. V.A. Mousseau and D.A. Knoll, “Temporal Accuracyof the Nonequilibrium Radiation Diffusion EquationsApplied to Two-Dimensional MultimaterialSimulations,” Nuclear Science and Engineering, Vol.154, pp. 174-189, (2006).
15. Argonne National Laboratory, PETSc Users Manual,ANL-95/11 – Revision 2.1.5, 2004.
16. IAEA, Status of Liquid Metal Cooled Fast ReactorTechnology, IAEA-TECDCC-1083, ISSN 1011-4289,1999.
17. H. Zhao, H. Zhang, V. Mousseau and P. Peterson,“Improving SFR Economics through Innovations fromThermal Design and Analysis Aspects,” Proceedings of2008 International Congress on Advances in NuclearPower Plants (ICAPP’08), American Nuclear Society,Anheim, CA, USA (2008).
18. P. Brown and Y. Saad, “Convergence Theory ofNonlinear Newton-Krylov Algorithms.” SIAM J Optim4(2):297-330, (1994).
19. Y. Saad and M. Schultz, “GMRES: a generalizedminimal residual algorithm for solving nonsymmetriclinear systems,” SIAM J. Sci. Stat. Comput. 7 (3), pp.856-869, (1986).
20. A. L. Hageman and D. M. Young, Applied IterativeMethods, Academic Press, New York, (1981).
21. G.E. Hammond, A.J. Valocchi and P.C. Lichtner,“Application of Jacobian-free Newton-Krylov withphysics-based preconditioning to biogeochemicaltransport”, Advances in Water Resources, 28 pp. 359-376, (2005).





























