Embed Size (px)
Citation preview

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE Dr YAHYA Fares DE MEDEA
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS Titre :
AÉROGÉNÉRATEURS
Auteur :
Dr. Abdelhafidh MOUALDIA
Année : 2014-2015 Approuvé par le Conseil Scientifique de la Faculté en date du :
N° d
e Série
:

Table de matière
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
TABLE DES MATIÈRES
INTRODUCTION GENERALE ----------------------------------------------------------------------------------------------- 9 I.1. I.1. DEFINITION ---------------------------------------------------------------------------------------------------------- 11 I.2. IRREGULARITE SPATIALE DU VENT ---------------------------------------------------------------------------- 11 I.3. IRREGULARITE TEMPORELLE ------------------------------------------------------------------------------------- 12 I.4. CARACTERISTIQUES DU VENT ------------------------------------------------------------------------------------ 12 I.4.1. Le vent géostrophique--------------------------------------------------------------------------------------------------- 12 I.4.2. Le vent thermique ------------------------------------------------------------------------------------------------------- 13 I.4.3. Le vent solaire ----------------------------------------------------------------------------------------------------------- 14 I.5. LES DIFFERENTS TYPES DE VENTS QUE NOUS POUVONS RENCONTRER ----------------------- 15 I.5.1. Le jet-stream ou courant jet -------------------------------------------------------------------------------------------- 16 I.5.3. Rose des vents ------------------------------------------------------------------------------------------------------------ 16 I.6.CARACTERISTIQUES DE DISTRIBUTION ET REPARTITION DE LA VITESSE DU VENT ------- 17 I.6.1. Distribution de Weibull ------------------------------------------------------------------------------------------------- 17 I.6.2. Energie du vent récupérable ------------------------------------------------------------------------------------------- 18 I.6.3. Historique de l’énergie du vent --------------------------------------------------------------------------------------- 18 I.6.4. L’éolienne dans le monde ---------------------------------------------------------------------------------------------- 19 I.7. MESURES DE LA VITESSE DU VENT ----------------------------------------------------------------------------- 20 I.7.1. Girouettes ------------------------------------------------------------------------------------------------------------------ 20 I.7.2. Anémomètres ------------------------------------------------------------------------------------------------------------- 21 I.7.3. Girouette-anémomètre à ultrasons ------------------------------------------------------------------------------------ 21 I.7.4. Qualité des mesures ----------------------------------------------------------------------------------------------------- 22 I.7.3. Girouette-anémomètre à ultrasons ------------------------------------------------------------------------------------ 22 I.8.DISTRIBUTION MONDIALE DE VENT ---------------------------------------------------------------------------- 22 I.9.DISTRIBUTION DE VENT EN ALGERIE -------------------------------------------------------------------------- 23 II.1. HISTORIQUE ------------------------------------------------------------------------------------------------------------- 25 II.2.CONTEXTE ACTUEL --------------------------------------------------------------------------------------------------- 26 II.3.APPLICATIONS DES EOLIENNES --------------------------------------------------------------------------------- 26 II.4.MACHINES A AXE VERTICAL -------------------------------------------------------------------------------------- 26 II.4.1.Eoliennes à rotor de Darrieus ----------------------------------------------------------------------------------------- 27 I.4.2. Eoliennes à rotor de Savonius ----------------------------------------------------------------------------------------- 27 II.4.3.La traînée différentielle ------------------------------------------------------------------------------------------------- 27 II.4.4.Variation cyclique d’incidence ---------------------------------------------------------------------------------------- 28 II.4.4.1.Avantages et inconvénients des éoliennes à axe vertical ---------------------------------------------------- 29 II.5.MACHINES A AXE HORIZONTAL --------------------------------------------------------------------------------- 29 I.5.1.Les éoliennes à marche lente ------------------------------------------------------------------------------------------- 30 I.5.2.Les éoliennes à marche rapide ----------------------------------------------------------------------------------------- 30 II.6.LES COMPOSANTES D’UNE EOLIENNE ------------------------------------------------------------------------ 30 II.6.1.Le rotor et ses pales ----------------------------------------------------------------------------------------------------- 30 II.6.2.La nacelle -------------------------------------------------------------------------------------------------------------- 31 II.6.3.La tour ------------------------------------------------------------------------------------------------------------------- 34 II.7.PRINCIPES DE FONCTIONNEMENT ----------------------------------------------------------------------------- 35 II.7.1.Fonctionnement aéromoteur ------------------------------------------------------------------------------------------- 35 II.7.1.1.Formule de Betz ---------------------------------------------------------------------------------------------------- 35 II.7.1.2.Modélisation du sillage ------------------------------------------------------------------------------------------- 37 II.7.3.Aéroélasticité ------------------------------------------------------------------------------------------------------------- 38 II.7.3.1.Sollicitations -------------------------------------------------------------------------------------------------------- 38 II.9.IMPACTS DIVERS ------------------------------------------------------------------------------------------------------- 41 II.9.INTERETS ------------------------------------------------------------------------------------------------------------------ 42 II.10.AVANTAGES ET INCONVENIENTS ----------------------------------------------------------------------------- 43 III.1.PRINCIPE DE CONVERSION DE L’ENERGIE ----------------------------------------------------------------- 45 III.1.1.Mode autonome --------------------------------------------------------------------------------------------------------- 45

Table de matière
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
III.1.2.Mode connectée au réseau -------------------------------------------------------------------------------------- 45 III.1.2.1.Vitesse fixe ------------------------------------------------------------------------------------------------------- 45
III.1.2.1.1.Machine Asynchrone à Cage ------------------------------------------------------------------------ 46 III.1.2.1.2.Machine Asynchrone à Double Stator ------------------------------------------------------------- 47 III.1.2.2.Vitesse Variable ------------------------------------------------------------------------------------------------ 47 III.1.2.2.1.Système Aérogénérateur utilisant une Génératrice Synchrone ------------------------------ 48 III.2.STRUCTURES DES AEROGENERATEURS BASEE SUR LA MACHINE SYNCHRONE ---------- 50 III.3. STRUCTURES DES AEROGENERATEURS BASEE SUR LA MACHINE ASYNCHRONE ------- 51 III.3.1. Générateur Asynchrone à Cage d’Ecureuil ----------------------------------------------------------------------- 51 III.3.2. Générateur Asynchrone à Rotor bobiné --------------------------------------------------------------------------- 52 III.3.3. Système Utilisant la Génératrice Asynchrone à Double Alimentation (GADA) -------------------------- 53 III.3.3.1.Machine Asynchrone à Double Alimentation à Energie Rotorique Dissipée ------------------------- 54 III.3.3.2. GADA -Structure de Kramer ---------------------------------------------------------------------------------- 55 III.3.3.3. MADA Structure de Scherbius avec Cyclo-convertisseur ----------------------------------------------- 55 III.3.3.4. GADA – Structure de Scherbius avec Convertisseurs MLI---------------------------------------------- 55 III.3.3.5. GADA Alimenté par Deux Convertisseurs Indépendants ------------------------------------------------ 56 III.3.3.6.Deux onduleurs alimentés en parallèle par un redresseur ------------------------------------------------- 57 III.3.3.7. GADA en Utilisant Plusieurs Modules de Convertisseurs Statiques à Deux Niveaux en Parallèle --------------------------------------------------------------------------------------------------------------------------- 57 III.3.3.8. GADA en Utilisant un Convertisseur NPC Multiniveaux ----------------------------------------------- 57 III.3.3.9. Machine Asynchrone à double alimentation en cascade ------------------------------------------------- 58 III.3.3.10. Machine en Cascade Avec une Carcasse Unique et un Rotor à Cage D’écureuil ------------------ 58 III.3.3.11.Génératrice Asynchrone à Double Alimentation en Cascade avec l’une de Deux Machines à Double Etoile ------------------------------------------------------------------------------------------------------------------ 58 III.4.MODE DE FONCTIONNEMENT DE LA MADA --------------------------------------------------------------- 59 III.5. CONNEXION DE PARCS EOLIENS AU RESEAU : FERMES «ONSHORE /OFFSHORE » -------- 60 III.6.SYNTHESE ---------------------------------------------------------------------------------------------------------------- 62 IV.1. INTRODUCTION ------------------------------------------------------------------------------------------------------- 63 IV.2.MODELE DE LA TURBINE ------------------------------------------------------------------------------------------ 63 IV.2.1. Modèle des pales ------------------------------------------------------------------------------------------------------- 64 IV.2.2.Courbe caractéristique du coefficient du couple ----------------------------------------------------------------- 65 IV.3. MODELE DU MULTIPLICATEUR DE VITESSE -------------------------------------------------------------- 65 IV.4. MODELE DE L’ARBRE MECANIQUE --------------------------------------------------------------------------- 66 IV.5. MODELE DU VENT --------------------------------------------------------------------------------------------------- 67 IV.6. LA VITESSE SPECIFIQUE OU NORMALISEE ---------------------------------------------------------------- 68 IV.7.STRATEGIES DE COMMANDE DE LA TURBINE EOLIENNE ---------------------------------------- 68 IV.8.MODELE DE LA GSAP ------------------------------------------------------------------------------------------------ 69 IV.8.1.Mise en équations ------------------------------------------------------------------------------------------------------ 70 IV.8.2.1. Résultats de simulation du GSAP à vide ------------------------------------------------------------------- 70 IV.8.3. Modélisation de la génératrice en charge ------------------------------------------------------------------------- 70 IV.8.4.Modélisation de l’onduleur de tension ----------------------------------------------------------------------------- 71 IV.8.4.1.Commande de l'onduleur par les techniques MLI -------------------------------------------------------- 71 IV.8.4.Modélisation de l’onduleur de tension ----------------------------------------------------------------------------- 72 IV.8.5. Alimentation utilisant un redresseur et onduleur contrôlés par MLI ---------------------------------------- 73 IV.8.5.1.Modélisation du redresseur triphasé double alternance à diodes ---------------------------------------- 74 IV.8.5.2.Modélisation du filtre -------------------------------------------------------------------------------------------- 74 IV.9.SYSTEME DE CONTROLE DE L’AEROTURBINE------------------------------------------------------------ 75 IV.9.1.Méthodes de recherche du point maximum de puissance ------------------------------------------------------ 77 IV.9.1.1.MPPT avec la connaissance de la courbe caractéristique de la turbine éolienne --------------------- 77 IV.8.4.Modélisation de l’onduleur de tension ----------------------------------------------------------------------------- 77 TRAVAUX DIRIGES --------------------------------------------------------------------------------------------------------- 84 BIBLIOGRAPHIE -------------------------------------------------------------------------------------------------------------- 94

Avants propos
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
Avant-propos
Ce document regroupe des notes de cours enseignés à l'université Dr Yahia Fares Médéa en
Master 1 spécialité Energie solaire photovoltaïque.
La polycopie constitue une étude sur les aérogénérateurs. Son objectif est de présenter les
notions de base de l’énergie éolienne ainsi que la méthode utilisé pour modéliser un système
éolien et les différentes structures des aérogénérateurs. Nous avons donné un peu d’historique
sur L’énergie éolienne qui est une source d’énergie utilisée depuis des siècles, pour faire
avancer les bateaux en mer, mais ce type d’énergie a été exploité aussi sur terre durant au
moins les 3000 dernières années, En effet, des moulins à vent étaient déjà utilisés pour
moudre du grain. Ainsi, dans un premier temps, l’énergie cinétique du vent était uniquement
transformée en énergie mécanique. Après, la technologie des aérogénérateurs ont évidemment
évoluée.
Ceci a permis, à l’énergie éolienne, de devenir ces dernières années une alternative aux
sources d’énergie traditionnelles. Afin de rendre notre présentation plus concrète, nous avons
adopté le logiciel Matlab/Simulink afin de simuler le comportement des éoliennes connecté au
réseau électrique ou isolé. Il comprend des données et perspectives qui montrent l’importance
et l’évolution dans le temps de ce processus de production d’énergie au niveau mondiale. Des
notions de bases du système éolien ont été données un aperçu sur les différents types
d’éoliennes (à axe vertical, horizontal et offshore).
Dans ce polycopié, nous commençons par la présentation des caractéristiques de vent dans le
chapitre I. Les perspectives énergétiques ne sont pas des prévisions mais des analyses
d’hypothèses, qui dessinent une "réalité" possible pour montrer les effets, sur le système
énergétique, des prix de l’énergie, de la croissance économique et démographique, des
prescriptions, ainsi que les effets des instruments tarifaires et des instruments
d’encouragement dans le domaine énergétique. Dans le chapitre III est consacré pour la
présentation des différentes architectures des aérogénérateurs que ce soit à vitesse fixe ou à
vitesse variable.
Notre polycopie se termine par le chapitre IV qui porte sur la modélisation d’une chaîne de
conversion éolienne basée sur une génératrice synchrone à aimants permanents, et constituée
d’un redresseur, un bus continu ; l’ensemble est relié au réseau via un onduleur à MLI, et un
filtre.

Liste des figures et tables
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
Liste des Figures et Tables
Chapitre I. Caractéristiques du vent Figure I.1.Hémisphère Sud 12 Figure I.2. Rose des vents site du Havre mesure journalière 16 Figure I.3.Caractéristiques de distribution et de répartition de la fréquence du vent 17 Figure I.4.Caractéristiques de distribution et de répartition de la vitesse du vent 18 Figure I.5.Capacité totale installée (MW) et prévision 2001-2010 19 Figure I.6.Capacité éolienne des trois premiers producteurs du monde en MW 20 Figure I.7. Tête de girouette à transmetteur. 20 Figure I.8. Anémomètres à hélice et à coupelles en tête de mât de voiliers 21 Figure I.9. Principe de Girouette-anémomètre à ultrasons 22 Figure I.10.Capacité éolienne mondiale installée. 23 Figure I.11.Carte annuelle de la vitesse du vent en (m/s) en Algérie. 23
Chapitre II. Éoliennes Fig. II.1. Eolienne à axe vertical (Structure de Darrieus) 27 Fig. II.2. Eolienne à axe vertical (Structure de Savonius) 27 Figure II.3. Effet du vent sur un corps creux 28 Figure II.4 .Rotor de Savonius 28 Figure II. 5. Différents types de rotor de Darrieus 29 Figure II.6. Eolienne à axe verticale 29 Figure II.7. Composantes d’une éolienne 30 Figure II.8. Eléments de la nacelle 32 Figure II.9.Comportement d’une pale dans un flux 35 Figure II.10.Représentation du tube de courant 37 Figure II.11.Classement des types d’éolienne 37 Figure II.12.Création de tourbillon 38 Figure II.13.Modèle de sillage en trois domaines 38 Figure II.14. Modélisation d’une éolienne 38 Figure II.15.Angles caractéristiques 39 Figure II.16. Exemple de deux premiers modes encastrés 39 Figure II.17.Premier mode de flexion 39 Figure II.18.Mouvement de battement 40 Figure II.19.Mouvement de traînée 40
Chapitre III. Système Aérogénérateurs Figure III.1. Aérogénérateur fonctionne en mode autonome 45 Figure III.2.Connexion directe au réseau de l'éolienne basée sur la MAS 47 Figure III.3.Connexion au réseau de l'éolienne avec la machine asynchrone à double stator 47 Figure III.4. Puissance récupérée en fonction de la vitesse de la turbine 48 Figure III.5. Eolienne à génératrice synchrone 49 Figure III.6. Machines synchrones à aimant permanent à flux axial 49 Figure III.7. Machines synchrones à aimants permanents à flux transversal 49 Figure III.8. Machine synchrone liée au réseau par un ensemble redresseur à diode, convertisseur et onduleur MLI
50
Figure III.9. Machine synchrone avec deux convertisseurs MLI en cascade. 51 Figure III.10. MS à aimants permanents utilisant plusieurs modules de convertisseurs statiques à deux niveaux en parallèle.
51
Figure III.11. Machine asynchrone à cage d’écureuil 52 Figure III.12. Machine asynchrone à Rotor bobiné 52 Figure III.13. Connexion indirecte d’une machine asynchrone sur le réseau 53 Figure III.14. Générateur asynchrone connectée au réseau par l’intermédiaire de deux onduleurs
53
Figure III.15. Aérogénérateur utilisant la MADA. 54 Figure III.16. GADA avec contrôle du glissement par l’énergie dissipée 54

Liste des figures et tables
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
Figure III.17. GADA structure Kramer 55 Figure III.18. Structure de Scherbius avec cyclo-convertisseur 55 Figure III.19. Structure de Scherbius avec convertisseurs MLI 56 Figure III.20. Schéma synoptique pour l’alimentation par deux cyclo-convertisseurs 56 Figure III.21. Alimentation de la GADA par deux onduleurs avec deux bus continus indépendants.
56
Figure III.22. Alimentation de la MADA avec deux onduleurs et un bus continu commun. 57 Figure III.23. GADA en utilisant plusieurs modules de convertisseurs statiques à deux niveaux en parallèle.
57
Figure III.24. GADA en utilisant un convertisseur NPC multiniveaux. 57 Figure III.25. Principe de fonctionnement de deux machines asynchrones en cascade. 58 Figure III.26. Machine en cascade avec une carcasse unique et un rotor à cage d’écureuil croisé.
58
Figure III.27. Système éolien basé sur le couplage en cascade de deux MADA, l’une à une étoile et la seconde à double étoile
59
Figure III.28. Modes de fonctionnement de la MADA. 59 Figure III.29. Exemples d’architectures de connexion des parcs éoliens au réseau 61
Chapitre IV. Modélisation de l’aérogénérateur Figure IV.1. Exemple d’une chaîne de conversion d’énergie éolienne. 63 Figure IV.2. Turbine éolienne. 64 Figure IV.3. Coefficient aérodynamique en fonction du ratio de vitesse de la turbine 65 Figure IV.4. Schéma bloc du modèle des pales 65 Figure IV.5. Modèle mécanique simplifié de la turbine 66 Figure IV.6. Modèle complet de la turbine 67 Figure IV.7. Profil de la vitesse du vent. 67 Figure IV.8. Vitesse de vent V et vitesse tangentielle de l’aubage ῼt. Rt 68 Figure IV.10. Caractéristique Puissance-Vitesse d’une éolienne de 1.5 MW 68 Figure IV.11. Comportement de la génératrice à aimants permanents à vide 69 Figure IV.12. onduleur de tension 71 Figure IV.13.Principe de la technique MLI triangulo- sinusoïdale 71 Figure IV.13.a. Représentation du redresseur triphasé à double alternance. 73 Figure IV.13.b. Schéma bloc (Matlab/Simulink) du redresseur et du filtre 74 Figure IV.14. Schéma bloc (Matlab/Simulink) de la génératrice à aimants permanents en charge.
75
Figure IV.15. Comportement de la génératrice synchrone à aimants permanents en charge.
75
Figure IV.16. Couple de référence en fonction de la vitesse de rotation. 78 Figure IV.17. Convergence vers le point optimal 79 Figure IV.18. Coefficient de puissance en fonction de la vitesse spécifique pour un angle de calage optimal (2°)
79
Figure IV.19. Schéma bloc (Matlab/Simulink) de la maximisation de puissance sans asservissement de vitesse.
80
Figure IV.20. Schéma bloc (Matlab/Simulink) de la chaine de conversion éolienne. 80 Figure IV.21. Profil de vent utilisé pour l’entrainement d’aérogénérateur 81 Figure IV.22. Puissance active et réactive 81 Figure IV.23. Allure des Tensions statoriques Vabc de la GSAP. 81 Figure IV.24. Allure de Tension redressé et filtré 82 Figure IV.25. Allure des Tensions de sortie de l’onduleur 82 Figure IV.26. Allure courants statoriques 83
Liste des Tables Tableau II.1.Résumé des principales tendances en Europe 25 Tableau II.2.Résumé des principales tendances en Europe 43 Tableau II.3.Avantages et inconvénients 44 Tableau III.1. Modes opérationnels de la MADA 61 Tableau IV.1 Différentes expressions du coefficient Cp. 66

Introduction générale
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
9
Introduction Générale
L'agence d'Énergie Internationale (IEA) prévoit qu'avant 2030, les besoins d’énergie
dans le monde seront presque soixante pour cent plus élevés que maintenant. Le deux-tiers de
cette augmentation concerne la Chine, l’Inde et dans d’autres économies en voie de
développement; ces pays représenteront presque la moitié de consommation d'énergie globale
avant 2030. Face à cette demande, et loin de l’utilisation des énergies fossiles polluantes
(pétrole et gaz), et de façon à limiter l'emploi de centrales nucléaires, plusieurs pays sont
tournés vers une nouvelle forme d'énergie dite "renouvelable". En effet, un véritable challenge
mondial est pris au sérieux aujourd’hui, aussi bien sur la politique de réduction des émissions
de gaz à effet de serre, en les ramenant à leur niveau de 1990 , que sur celui de l’exploitation
des ressources d’énergie renouvelable. Ceci a été recommandé à la 3ème Conférence des
Parties de la convention – cadre des nations unies sur les changements climatiques qui se sont
tenue à Kyoto en décembre 1997.
Cette évolution a engendré une accélération d'insertion de production décentralisée
d'électricité dans les réseaux de distribution et parmi ces productions, le marché mondial de
l’énergie éolienne progresse plus rapidement que celui de toute autre source d’énergie
renouvelable. Le total mondial, qui ne dépassait pas 4800 MW en 1995, a atteint 282 482 MW
en 2013, après 158 505 MW en 2009, 74 052 MW en 2006 et 93 835 MW en 2007 et 120 297
MW en 2008 , D'après les prévisions 2011 du GWEC, la capacité mondiale devrait s'élever à
493 330 MW fin 2016. En 2020, leur scénario prévoit environ 832 000 MW de puissance
installée.
De nos jours, la forme la plus connue et utilisée de technologie éolienne est
l’aérogénérateur; i.e. une machine qui obtient de l’énergie à partir du vent pour générer un
courant électrique. La taille de ces turbines éoliennes modernes va de quelques watts jusqu’à
plusieurs mégawatts. La majorité des systèmes commerciaux actuels sont des turbines
éoliennes à axe horizontal (HAWT) avec des rotors à trois pales (tripales). Les turbines
peuvent transférer de l’énergie électrique à un réseau de puissance à travers des
transformateurs, lignes de transport et sous-stations associés. L’utilisation de ces
aérogénérateurs présente des avantages importants. En effet, ils sont pour l’instant l’un des
moyens les plus écologiques d’obtenir de l’électricité et cette source est inépuisable.
Cependant le coût de l’énergie éolienne est encore trop élevé pour concurrencer les sources
traditionnelles.
Grâce au progrès de l’électronique de puissance les dernières générations d’éoliennes
fonctionnent avec une vitesse variable et disposent d’une régulation pitch. Il est ainsi possible
de modifier la vitesse de rotation et l’angle de calage de chacune des pales, permettant alors
d’améliorer la production de l’aérogénérateur.
La polycopie est structurée suivant le nouveau programme de Master 1 spécialité
énergie solaire photovoltaïque comme suit :

Introduction générale
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
10
Le premier chapitre présente les caractéristiques du vent, les types de vent existant en Europe
ou en Algérie, la variation de la vitesse de vent avec la hauteur, moyens de mesure de la vitesse de
vent et la distribution du vent en Algérie présentés dans la polycopie.
Par la suite, le deuxième chapitre discute les éoliennes, leurs constitutions, technologies,
principes de fonctionnement et spécificités des générateurs éoliens.
Dans le troisième chapitre nous abordons Différents types de machines électriques peuvent
être utilisés pour la génération de puissance éolienne. Des facteurs techniques et économiques fixent
le type de machine pour chaque application.
Le quatrième chapitre est consacré à la modélisation analytique des différents éléments
constituant le système de conversion de l’énergie éolienne qui basé sur la machine synchrone à aimant
permanent. Avec l’utilisation du logiciel Matlab/Simulink pour simuler le comportement
d’aérogénérateur.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
11
Chapitre I :
Caractéristiques du vent
I.1. DEFINITION
Le vent est de l'air qui se déplace des anticyclones ( hautes pressions ) vers les
dépressions ( basses pressions ) ; le vent "coule" comme une rivière dévalerait une pente d'une
montagne ; du coup, plus la pente est raide, plus l'eau coule vite ; c'est la même chose pour le
vent : plus la différence de pression est grande, plus le vent souffle fort ; nous parlons de
cisaillement ( ou sautée de vent )lorsque la variation de l'intensité de la vitesse du vent et la
variation de l'intensité de la direction du vent varient fortement en altitude . Par exemple, lors
de la tempête du 26 Décembre, il y avait une dépression dont le centre atteignait 950 hPa et
une autre dépression dont le centre atteignait 1000 hPa ; d'où le vent très fort qui circulait à ce
moment-là. Voyons d'un peu plus près les caractéristiques du vent.
I.2. IRREGULARITE SPATIALE DU VENT :
Le vent est très irrégulier. En effet il est faible dans la zone polaire nord et dans la zone
intertropicale ; il est maximal vers ± 55 o de latitude. Il est fort en mer. En Eurasie, il décroît
d’ouest en est. À ces évolutions à grande échelle, se superposent de nombreuses irrégularités à
échelle beaucoup plus petite, parfois de quelques dizaines de kilomètres carrés. La vitesse du
vent est une fonction croissante avec la hauteur au-dessus du sol et avec l’altitude (par rapport
au niveau de la mer). La loi de répartition de la vitesse suivant une verticale dépend, d’une
part, du relief local et, d’autre part, de la rugosité de la région. Au sommet d’une colline
arrondie, on a un accroissement local de vitesse dont l’effet peut inverser le gradient de
vitesse habituel et faire que la vitesse au sol soit plus grande qu’à une certaine hauteur. En
terrain plat, on peut représenter la variation de vitesse v en fonction de la hauteur h au-dessus
du sol par la loi :
=
α
(1)
Avec
v0 : vitesse à la hauteur h0 de référence au-dessus du sol,
α : coefficient caractéristique du lieu .Le coefficient α a sensiblement les valeurs suivantes :
— sur un rivage : α = 0,16 ;
— en mer : α= 0,13 ;
— en plaine : α = 0,2 ;
— en plaine boisée : α= 0,24 ;
— en ville : α= 0,3.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
12
I.3. IRREGULARITE TEMPORELLE
Le vent est aussi temporellement irrégulier. À partir de relevés anémométriques, on
trace la courbe vitesse-durée intéressant une période donnée (en général un an) : pour chaque
valeur de la vitesse du vent, on détermine le nombre d’heures pendant lesquelles cette vitesse
du vent est supérieure ou égale à la vitesse considérée. On peut caractériser ces courbes par la
valeur moyenne annuelle pour la période considérée. Il est possible aussi d’en déduire la
courbe de fréquence (c’est-à-dire la variation inverse de la pente des courbes vitesse-durée)
qui indique le nombre d’heures, pour la période considérée, pendant lesquelles la vitesse du
vent reste comprise entre des valeurs données.
I.4. CARACTERISTIQUES DU VENT
Le vent possède des caractéristiques bien précises ; il y a en fait 2 types de vent : le vent
géostrophique et le vent au sol (le vent tel que nous le ressentons).
I.4.1. Le vent géostrophique
Le vent géostrophique Vg concerne les hautes altitudes et est composé de deux forces la force
de Coriolis Fc et la force de pression Fp comme indiquées sur les schémas ci-dessous :
Figure 1. Hémisphère Nord
Figure I.1.Hémisphère Sud
Le vent géostrophique découvert par le mathématicien physicien français Pierre Simon
Laplace (1749-1827) est une assez bonne approche de la vitesse du vent telle que nous le

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
13
ressentons : le vent géostrophique se calcule à partir d'une carte d'isohypses (même altitude) et
de la loi de Laplace :
Vg = ( g / f ) ( dz / dl ) (3) g : intensité de pesanteur en m.s-2 f : paramètre de Coriolis non nul qui vaut 2.omega.sin.F omega : vitesse angulaire de rotation de la Terre en rad.s-1 : 0,73.10-4 F : latitude du point considéré en ° dz : différence d'indice entre 2 isohypses dl : distance entre deux isohypses en mètre Sachez que le vent géostrophique est toujours tangent aux isohypses et même aux isobares
(lignes d'égales pressions) selon la loi de Buys-Ballot (météorologiste néerlandais 1817-1890)
; et est, si vous avez réussi à faire le calcul, 1,5 fois supérieur à la vitesse du vent ressenti.
I.4.2. Le vent thermique
Le vent thermique noté Vt est une approximation du vent géostrophique et est définie de la
manière suivante :
Vt = Vgs - Vgb
(4)
Vgs : vent géostrophique au niveau de pression Ps Vgb : vent géostrophique au niveau de pression Pb Or, la direction du vent géostrophique est dépendant de la composante z d'un repère élaboré
par des vecteurs orthogonaux ( x,y,z ). De plus, la loi de Laplace s'écrit
b : altitude b Za : altitude a pa : masse volumique de l'air sec Ra : constante spécifique du gaz en présence d'un air sec Tvm : température virtuelle g : norme du champ de pesanteur D'où
Vt = [(Raln(Pb/Ps))( k vectoriel grad(Tvm )] / f
(7)
Après détermination de la vitesse de vent au sol, il ne reste plus qu'à indiquer dans votre
prévision météorologique la force associée à la vitesse du vent ; c'est pour cela que je vous
rappelle l'échelle anémométrique (parce que nous mesurons la vitesse du vent avec un
anémomètre) de Beaufort (créée par l'amiral anglais, François Beaufort en 1802) :
dP = -pag dZ (5) d'où Zb-Za = [(Ra.Tvm) ln (Pb/Ps)] / g
(6)

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
14
Force Vitesse du vent (km / h)
le temps en mer le temps à l'intérieur des terres
0 Inférieure à 1 la mer ne bouge pas d'un poil. les fumées des usines s'élèvent normalement
1 1à 7 de petites vaguelettes apparaissent sur l'eau. les girouettes ne bougent pas ; les fumées des usines sont légèrement déviées de leur trajectoire.
2 8 à 12 les vagues atteignent 20 cm de hauteur. les feuilles et les girouettes commencent à bouger.
3 13 à 20 les vagues atteignent 60 cm de hauteur. les drapeaux se déploient. 4 21 à 30 les vagues atteignent 1 m de hauteur. les feuilles se baladent dans le ciel. 5 31 à 41 les voiles sont gonflées. les grandes branches des arbres
commencent à bouger. 6 42 à 50 les vagues peuvent atteindre 3 m de hauteur. les fils électriques et les fils
téléphoniques bougent. 7 51 à 61 les vagues atteignent 4 m de hauteur. la marche face au vent devient
difficile ; les parapluies se retournent
8 62 à 76 les vagues peuvent atteindre 6 m de hauteur. le vent souffle en tempête ; la marche face au vent quasi impossible.
9 77 à 88 les vagues atteignent 8 m de hauteur. les cheminées des maisons sont emportées.
10 89 à 104 les vagues atteignent 10 m de hauteur. les arbres commencent à être déracinés.
11 105 à 120 les vagues atteignent 12 m de hauteur. les dégâts n'épargnent quasiment personne.
123 Plus de 120 les vagues peuvent atteindre 15 m de hauteur.
un véritable ouragan.
I.4.3. Le vent solaire
Fluide assimilé à un plasma formant un espace (atmosphère du soleil) dans lequel se trouve la Terre et son atmosphère. En électromagnétisme des milieux, le plasma de température T = 50 000 K (T = 50 275,25 °C) est constitué d'hydrogène sous forme de protons et d'électrons émis par la couronne solaire avec :
vitesse d'environ 200 km / s Une densité de 10 en moyenne dans un volume équivalent à 1 cm cube : une très faible
concentration de particules permettant des transferts énergétiques uniquement par échanges radiatifs.
a) Les polygones de brise Crée par le météorologiste ANGOT, c'est une indication de l'évolution du vecteur vent à chaque altitude. Elle tient compte des paramètres suivants :
Pression atmosphérique (seulement les valeurs supérieures ou égales à 1015 hPa). Précipitations (si quantité équivalente à 0 mm). Nébulosité moyenne de la journée. Pas de Stratus présents à 15h UTC. Vent moyen inférieur ou égal à 30 km / h.
b) Le coefficient de pénétration

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
15
Les véhicules qu'ils volent (avions), qu'ils flottent (bateaux) ou qu'ils roulent (voitures)
subissent les effets de la vitesse du vent apparent (vitesse dépendant de la vitesse des véhicules par rapport à la direction du vent et à la vitesse du vent). Ainsi, nous mettons en évidence le coefficient de pénétration dans l'air d'un corps (noté Cx) qui ne dépend que de la forme du corps dans l'espace : plus le Cx diminue, plus la résistance de l'air diminue et moins nous consommons de l’énergie. Nous en avons un parfait exemple sur la manière de courir qui fait que nous pourrons parcourir une distance plus ou moins grande . Un autre exemple concerne les voitures de formule 1 dont les concepteurs modifient l'aérodynamisme pour que l'air circule plus facilement au sein des véhicules et diminuer ainsi les consommations en essence. Continuons dans les courses avec en altitude une concentration en molécules d'air moins importante diminuant la résistance de l'air : c'est pour ça que la plupart des records du moindre dans le domaine du sport sont battus en altitude comme en cyclisme à La Paz (Bolivie).
I.5. LES DIFFERENTS TYPES DE VENTS QUE NOUS POUVONS RENCONTRER
En France
Autan blanc (vient du latin "Alta nus" qui veut dire "originaire du large») : comme
son nom l'indique, c'est un vent de Sud-Est qui, attiré par les basses pressions du
Massif Central, déverse son lot de pluie entre le Massif Central et les Pyrénées. Est à
l'origine de ce qu'on appelle l'effet de Foehn (vent sec et chaud).
Autan noir : souffle d'Est en Ouest entre le Massif Central et les Pyrénées ; apporte des orages l’été.
Mistral : vent de Nord-Est puis très rapidement de Nord qui souffle très fort en Méditerranée (jusqu’à 160 km / h parfois) après le passage d'une perturbation.
Tramontane : vent de Nord-Ouest qui souffle du Massif Central très fort pendant l’hiver.
Dans le monde
Alizés Est ou easterlies : ce sont des vents chauds et plus ou moins humide selon les
tropiques qui soufflent uniquement au niveau de l'équateur ou plus précisément la
Zone de Convergence Intertropical (ZCI). Les Alizés sont responsables avec l'air froid
continental de pluies torrentielles dans le Sud de l'Inde pendant les moussons
(Décembre-Février et Juin-Août) ; ce vent souffle de l'Est vers l’Ouest.
Alizés Ouest ou westerlies : même définition sauf que ce vent souffle de l'Ouest vers
l’Est.
Harmattan : vent sec soufflant du Sahara vers les côtes du Sud-Ouest de l'Afrique ;
est à l'origine lors de sa rencontre avec l'Alizé de l'Océan Atlantique de fortes
précipitations pouvant entraîner des inondations catastrophiques. Ces fortes
précipitations ont lieu pendant les moussons (Décembre-Février et Juin-Août).
Les Quarantièmes rugissants : nous employons ce terme pour parler de la course de
voiles autour du monde ; c'est un vent d'Ouest très froid qui souffle dans les mers
australes.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
16
Le Shamal : en arabe, "shamal" veut dire "Nord" ; c'est un vent du golfe Persique qui
souffle très fort pendant quelques jours après le passage d'un talweg ( ligne orageuse )
; en hiver, des dépressions en Méditerranée naissent et essaient d'atteindre le Golfe
Persique tout en "entrant en collision" avec l'anticyclone confortablement installé et
qui ne bouge jamais ; en été, la Mousson Indienne génère de nombreuses dépressions ;
été comme hiver, le gradient de pression augmente, l'écoulement de l'air des hautes
couches de l'atmosphère aussi ; du coup, le vent souffle très fortement et provoque un
temps sec ; un peu comme le Mistral en France .
I.5.1. Le jet-stream ou courant jet
Vent particulier (c’est pour cela que je le traite à part) parce que circulant à près de
12000 mètres d’altitude. Ce vent a la particularité de souffler fort (500 km / h), ce qui est
logique puisque ce vent est le résultat de la rencontre les vents polaires (vent provenant des
pôles) et les vents d'Ouest qui donnent les westerlies (vent de Nord-Ouest pour l'hémisphère
Sud et vent de Sud-Ouest pour l'hémisphère Nord).
I.5.2. Rose des vents La rose des vents est un diagramme polaire qui permet de connaître la vitesse et la direction du vent sur la période des relevés. On affiche trois éléments (figure 3) : le pourcentage du temps global pendant lequel le vent souffle suivant une direction
donnée (indiqué par les secteurs bleus clairs) ; le pourcentage d’énergie totale par secteur (représenté par les secteurs bleus foncés). Cela
indique la direction qui fournit le maximum d’énergie ; la moyenne de la turbulence en intensité par secteur qui est représentée par un nombre
s’affichant sur chaque secteur. L’intensité de la turbulence est déterminée sur une durée de mesure en calculant le ratio « écart type divisé par vitesse moyenne ». Ce relevé permet de connaître le positionnement des éoliennes par rapport à d’éventuels obstacles. C’est un diagramme spatiotemporel produit ou utilisé par des logiciels professionnels pour évaluer qualitativement les possibilités d’un site. La quantification du « gisement » éolien se fait surtout à partir de fonctions de distribution des vitesses classées.
Figure I.2. Rose des vents site du Havre mesure journalière

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
17
I.6.CARACTERISTIQUES DE DISTRIBUTION ET REPARTITION DE LA VITESSE DU VENT En disposant, pendant une période de référence, d’un ensemble de N valeurs mesurées de la vitesse du vent v, on détermine la caractéristique de distribution des vitesses du vent et la caractéristique des fréquences cumulées (figure 5) déterminée ici pour une variation du vent égale à 0,5 m/s. Avec l’intégration par rapport au temps de la densité de la puissance (supposée proportionnelle au cube de la vitesse du vent), il est possible de déterminer la densité de l’énergie qui s’exprime en kWh/m2 de surface interceptée. Pour effectuer une analyse des principales propriétés statistiques, on utilise les modèles mathématiques des fonctions de distribution.
I.6.1. Distribution de Weibull Si le nombre N d’échantillons relevés tend vers l’infini et Δv → dv, la fréquence fi et la fréquence cumulée Fi tendent, respectivement, vers la fonction de densité de probabilité f(v) et vers la fonction de répartition F(v). Parmi les distributions utilisées dans les modèles statistiques, la distribution de Weibull c’est avérée appropriée pour la description des propriétés statistiques du vent. La fonction de répartition de Weibull à deux paramètres c et k s’écrit :
(8)
Où le paramètre c (m/s) est dénommé facteur d’échelle et k est le facteur de forme, sans dimension, caractérisant l’asymétrie de la distribution. On donne à la figure 6 la densité de probabilité pour le cas k = 2, paramétré par c. Le calcul des paramètres c et k est fait en partant du diagramme des fréquences cumulées mesurées et en utilisant la méthode des moindres carrés. Cette courbe statistique permet d’évaluer l’importance des tranches de vitesse de vents pour la production d’énergie. En fonction des caractéristiques de la turbine, le potentiel énergétique ainsi défini sera plus ou moins bien exploité en fonction des contraintes physiques comme les limitations du système électromécanique et les efforts s’exerçant sur la structure.
Figure I.3.Caractéristiques de distribution et de répartition de la vitesse du vent

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
18
Figure I.4. Distribution de Weibull pour k=2 avec c e n paramètre
I.6.2. Energie du vent récupérable L’énergie du vent est l’énergie cinétique de l’air qui traverse une certaine surface S. La puissance est donc :
3
2
1²
2
1SvSvvW
(7) Avec ρ masse volumique de l’air (ρ ≈ 1,25 kg/m3 dans les conditions normales de température et de pression au niveau de la mer). La puissance varie donc comme le cube de la vitesse v du vent. La masse volumique étant faible, la puissance éolienne est une puissance diluée puisque la vitesse v ne vaut, le plus souvent, que quelques mètres par seconde. On parle plutôt d’énergie annuelle. Dans des régions à vent très faible, l’énergie théorique ne peut être que de 200 kWh/m² et par an. Dans certaines régions privilégiées, en Bretagne, Normandie et Roussillon, elle atteint 4 000 kWh/m² et par an à 40 m au-dessus du sol. En moyenne en France, elle est de 800 kWh/m² et par an.
I.6.3. Historique de l’énergie du vent Pendant des siècles, l'énergie éolienne a été utilisée pour fournir un travail mécanique. L'exemple le plus connu est le moulin à vent utilisé par le meunier pour la transformation du blé en farine. Par la suite, pendant plusieurs décennies, l'énergie éolienne permet de l’énergie électrique dans des endroits reculés et donc non-connectés à un réseau électrique. Des installations sans stockage d’énergie impliquaient que le besoin en énergie et la présence d'énergie éolienne soit simultané. La maîtrise du stockage d’énergie par batteries a permis de stocker cette énergie et ainsi de l'utiliser sans présence de vent, ce type d'installation ne concernant que des besoins domestiques, non appliqués à l'industrie. Depuis les années 90, l'amélioration de la technologie des éoliennes a permis de construire des aérogénérateurs de plus de 1MW. Ces éoliennes servent aujourd'hui à produire du courant alternatif pour les réseaux électriques, au même titre qu'un réacteur nucléaire, un barrage hydroélectrique ou une centrale thermique au charbon. Cependant, les puissances générées et les impacts sur l'environnement ne sont pas les mêmes. L’énergie du vent ou l’énergie éolienne est le résultat des déplacements de l’air et plus spécifiquement, l’énergie tirée du vent au moyen d’un dispositif aérogénérateur comme une éolienne ou un moulin à vent. Elle peut être utilisée de deux manières : directe et indirecte.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
19
A. Direct : Conservation de l’énergie mécanique : le vent est utilisé pour faire avancer un véhicule (navire à voile ou char à voile), pour pomper de l’eau (moulins de Majorque, éoliennes de pompage pour abreuver le bétail) ou pour faire tourner la meule d’un moulin.
B. Indirect : Transformation en énergie électrique : l’éolienne est accouplée à un générateur électrique pour fabriquer un courant continu ou alternatif, le générateur est relié à un réseau électrique ou bien il fonctionne de manière autonome avec un générateur d’appoint (par exemple un groupe électrogène) ou un parc de batteries ou un autre dispositif de stockage d’énergie.
Les éoliennes sont conçues de manière à produire un maximum de puissance pour des vents de force moyenne fréquemment rencontrées. Elles atteignent leur puissance nominale pour une vitesse de vent de 50 km/h (14 m/s). Si le vent devient plus violent, la machine subit des contraintes plus importantes. Elle est alors freinée grâce à un système de régulation électronique qui lui permet de rester à la puissance maximale (atteinte dès 50 km/h) tout en limitant les efforts sur la structure. Au-delà d'un certain seuil (90 km/h, soit 25 m/s), la régulation ne suffit plus. La machine est alors stoppée afin de lui éviter de subir des charges trop importantes.
I.6.4. L’éolienne dans le monde Fin 2010, 193 GW (milliards de watts) d'éoliens sont installés dans le monde. En 2010, la Chine a investi 63 milliards de dollars dans l'éolien, les USA 18 milliards de dollars. La croissance des investissements dans l'éolien a été de 34% en 2010. Quant à la puissance, elle a augmenté de 22% en 2010 (soit 35,8 GW).
Figure I.5.Capacité totale installée (MW) et prévision 2001-2010

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
20
Figure I.6.Capacité éolienne des trois premiers producteurs du monde en MW
I.7. MESURES DE LA VITESSE DU VENT Le vent est un paramètre important de l’état de l’atmosphère. Même en dehors des épisodes tempétueux au cours desquels les effets du vent sont parfois dramatiques, la connaissance de la direction et de la vitesse du vent est souvent indispensable pour gérer au mieux un certain nombre d’activités. A proximité de la surface de la Terre, c’est la composante horizontale du vent qui prédomine très largement et les appareils usuellement mis en œuvre pour mesurer vitesse et direction du vent ne prennent en compte que cette composante.
I.7.1. Girouettes Du point de vue technique, il est assez facile de déterminer la direction du vent, et l’invention de la girouette est très ancienne. A l’heure actuelle, il existe une vaste gamme de dispositifs qui reposent presque tous sur le même principe: la rotation d’un système mécanique autour d’un axe vertical.
Figure I.7. Tête de girouette à transmetteur.
A l’intérieur du boitier cylindrique se situe un dispositif (potentiomètre ou détecteurs optoélectroniques) qui traduit l’orientation de la girouette en un signal électrique véhiculé vers la centrale d’acquisition des données. Pour offrir des indications fiables, une girouette doit à la fois être sensible au vent et ne pas osciller à la moindre turbulence. Ces exigences
Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
21
sont contradictoires et une réalisation soignée de l’axe de rotation ainsi qu’un bon équilibrage de la partie mobile sont nécessaires. Dans les modèles pour amateurs, on peut compter sur une précision de l’ordre de 3° à 5°. Au fil du temps, la pénétration d’eau et de poussières peut générer des frottements sur l’axe, affecter l’électronique et altérer le fonctionnement d’une girouette.
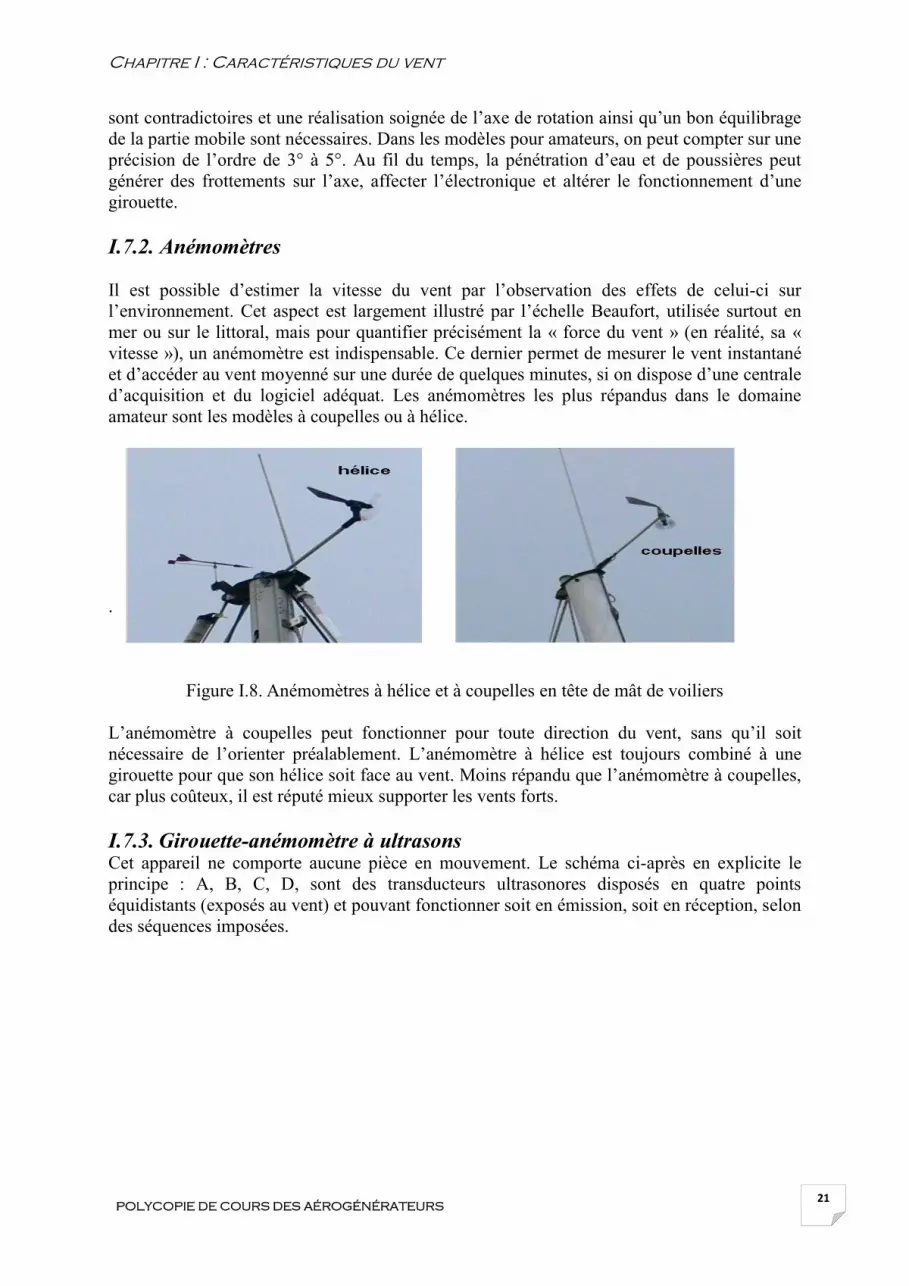
I.7.2. Anémomètres Il est possible d’estimer la vitesse du vent par l’observation des effets de celui-ci sur l’environnement. Cet aspect est largement illustré par l’échelle Beaufort, utilisée surtout en mer ou sur le littoral, mais pour quantifier précisément la « force du vent » (en réalité, sa « vitesse »), un anémomètre est indispensable. Ce dernier permet de mesurer le vent instantané et d’accéder au vent moyenné sur une durée de quelques minutes, si on dispose d’une centrale d’acquisition et du logiciel adéquat. Les anémomètres les plus répandus dans le domaine amateur sont les modèles à coupelles ou à hélice. .
Figure I.8. Anémomètres à hélice et à coupelles en tête de mât de voiliers L’anémomètre à coupelles peut fonctionner pour toute direction du vent, sans qu’il soit nécessaire de l’orienter préalablement. L’anémomètre à hélice est toujours combiné à une girouette pour que son hélice soit face au vent. Moins répandu que l’anémomètre à coupelles, car plus coûteux, il est réputé mieux supporter les vents forts.
I.7.3. Girouette-anémomètre à ultrasons Cet appareil ne comporte aucune pièce en mouvement. Le schéma ci-après en explicite le principe : A, B, C, D, sont des transducteurs ultrasonores disposés en quatre points équidistants (exposés au vent) et pouvant fonctionner soit en émission, soit en réception, selon des séquences imposées.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
22
Figure I.9. Principe de Girouette-anémomètre à ultrasons - à l’instant t1, A émet une impulsion ultrasonore qui est reçue par B au bout de tA->B. - à l’instant t2, B émet une impulsion ultrasonore qui est reçue par A au bout de tB->A. Un ultrason étant une perturbation mécanique de l’atmosphère, S’il n’y a pas de vent, tB->A = tA->B S’il y a du vent, tB->A diffère de tA->B (dans l’exemple choisi, tB->A < tA->B. Ainsi,
avec 3 ou 4 transducteurs (et au prix de quelques calculs), on peut déterminer direction et vitesse du vent.
Le prix des anémomètres à ultrasons que l’on trouve sur le marché se situe encore à des niveaux élevés (plus de 500 €), mais on peut espérer qu’avec une diffusion plus large les prix baisseront…
I.7.4. Qualité des mesures Elle dépend en premier lieu de l’implantation, et ce point sera prochainement abordé, mais aussi de la conception et du soin apporté à la fabrication de l’appareil. Un anémomètre manuel offre typiquement une fourchette de mesures située entre 0,2 m.s-1 (soit moins d’1 km.h-1) et 30 m.s-1 (soit 108 km.h-1)… mais peut-on encore le tenir correctement dans sa main lors de rafales supérieures à 100 km.h-1 ? Pour les anémomètres à coupelles fixés sur un mât, les performances annoncées se situent entre 1 et 60 m.s-1 (soit 216 km.h-1), avec une précision de 5% à 10% selon les modèles. Dans la pratique, les résultats obtenus sont parfois assez loin des performances annoncées, notamment pour les vents faibles (mise en rotation difficile). Cela est lié à la conception même de ces appareils. La girouette effectue en général des mouvements de rotation alternés et de faible amplitude, alors que le moulinet de l’anémomètre peut être entraîné en rotation très rapide. Dans un capteur combiné un dispositif coaxial permet de transmettre simultanément ces deux mouvements aux détecteurs qui les convertissent en signaux électroniques. Du point de vue mécanique, la réalisation doit être extrêmement soignée et les frottements minimisés pour assurer sensibilité, mobilité, précision, résistance à l’usure de cet ensemble fréquemment exposé aux poussières et à la pluie.
I.8.DISTRIBUTION MONDIALE DE VENT
Comme il est montré sur la Figure I.10 la production de l’énergie éolienne connaît
depuis quelques années. La capacité mondiale a atteint 196630 MW, dont 37642 ont été

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
23
ajoutés en 2010, soit légèrement moins qu'en 2009 [03]. En 2010, la capacité mondiale
installée a atteint 196630 MW, après 159766 MW en 2009. Les investissements dans les
nouveaux équipements ont diminué dans de nombreux pays du monde. Pour la première fois
depuis plus de 20 ans, le marché est inférieur à celui de l'année précédente et a atteint un
volume global de 37642 MW, après 38312 MW en 2009.
L'énergie éolienne a montré une croissance de 23.6%, la plus basse depuis 2004 et la
seconde plus basse de la décennie passée. 23.6%, le taux de croissance de 2010. Le
taux de croissance est le rapport entre la capacité ajoutée la capacité totale de l'année
précédente. Avant 2010, le taux de croissance annuel n'avait cessé de croître depuis
2004, culminant à 31.7% en 2009, la plus forte valeur depuis 2001. Le plus fort taux
de croissance de 2010 se trouve en Roumanie, qui a multiplié sa capacité par 40. La
seconde région au taux de croissance de plus de 100% est la Bulgarie (+112%). En 2009,
quatre marchés avaient plus que doublé leur capacité éolienne : Chine, Mexique, Turquie et
Maroc.
Figure I.10.Capacité éolienne mondiale installée.
I.9.DISTRIBUTION DE VENT EN ALGERIE
L’Algérie présente un potentiel éolien considérable qui peut être exploité pour la
production d’énergie électrique, surtout dans le sud où les vitesses de vents sont élevées et
peuvent dépasser 4m/s (6m/s dans la région de Tindouf), et jusqu’à 7m/s dans la région
d’Adrar.
Figure I.11.Carte annuelle de la vitesse du vent en (m/s) en Algérie.

Chapitre I : Caractéristiques du vent
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
24
Les ressources énergétiques de l’Algérie ont déjà été estimées par le CDER depuis les
années 90 à travers la production des atlas de la vitesse du vent et du potentiel énergétique
éolien disponible en Algérie. Ceci a permis l’identification de huit zones ventées susceptibles
de recevoir des installations éoliennes :
1. Deux zones sur le littoral,
2. Trois zones sur les hauts plateaux et
3. Quatre zones en sites sahariens

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
25
Chapitre II.
ÉOLIENNES
II.1. HISTORIQUE
L’énergie éolienne est la plus ancienne énergie utilisée par l’homme en dehors de son énergie
musculaire. L’utilisation de la force du vent pour suppléer l’énergie humaine ou animale n’est pas
nouvelle. On peut ainsi trouver la trace d’ancêtres des éoliennes modernes jusque dans la Perse
ancienne. Plus près de nous, certains pays ont, depuis le Moyen Âge, largement fait usage de ce type
d’énergie par le biais des moulins à vent (moulins hollandais) ou des éoliennes dites américaines
que ce soit pour moudre le grain ou pomper l’eau.
Au cours des siècles, on a vu ainsi la technologie des moulins évoluer grâce à l’apparition de
toits orientables permettant une utilisation plus intensive, puis de moulins complets montés sur pivot.
Enfin, la dernière évolution marquante a été l’adoption de profils semblables à des ailes d’avion, en
lieu et place de la toile tendue sur une structure en bois, du fait de la compréhension des phénomènes
aérodynamiques, acoustiques et aéroélectriques impliqués.
Parallèlement, les progrès technologiques, tant dans les domaines de l’électrotechnique, de
l’électronique que dans celui des matériaux, font que l’on peut désormais disposer de machines aux
performances étonnantes en terme de puissance produite, tout en limitant les impacts sur
l’environnement.
II.2.CONTEXTE ACTUEL
Bien que ne pouvant envisager de remplacer totalement les sources traditionnelles d’énergie,
l’énergie éolienne peut toutefois proposer une alternative intéressante et renouvelable. Elle s’inscrit
parfaitement dans l’effort global de réductions des émissions de CO2, etc. Son développement s’est
fortement accéléré depuis 1995 avec une progression moyenne de 20 % par an dans le monde. Cette
progression s’accompagne par une évolution de la fiabilité, de la taille des éoliennes et de leur
rendement (tableau 1). Le coût de production du kilowattheure a progressivement baissé pour atteindre
un niveau compétitif par rapport aux autres sources d’énergie. Dans l’ensemble de la puissance
installée, l’Europe est le leader suivie par l’Amérique du Nord.
Tableau II.1.Résumé des principales tendances en Europe
Années Capacité (kW) Diamètre du rotor (m) Coût du kWh (Euro)
1980 -1983 55 15 0.090
1986 -1988 120 21 0.067
1993 -1994 400 à 500 37 0.045
1995 - 1996 500 à 750 40 0.040
Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
26
1997 -1999 600 à 2500 43 0.030
II.3.APPLICATIONS DES EOLIENNES
L’intérêt d’une éolienne se justifie par la possibilité qu’elle apporte de récupérer l’énergie cinétique
présente dans le vent. Cette énergie est transformée en énergie mécanique de rotation. Cette énergie
mécanique peut être exploitée principalement de deux manières :
soit directement pour entraîner par exemple une pompe de relevage d’eau,
soit pour entraîner une génératrice électrique.
Dans le cas de production d’énergie électrique, on peut distinguer deux types de configuration :
l’énergie est stockée dans des accumulateurs en vue de son utilisation ultérieure,
l’énergie est utilisée directement par injection sur un réseau de distribution.
On constate ainsi les applications électriques de l’énergie éolienne, à savoir d’une part la
complémentarité avec les moyens traditionnels de production (centrales thermiques classiques ou
nucléaires, barrages...) pour des régions disposant d’une infrastructure existante et d’autre part la
possibilité de production sur des sites non raccordés à un réseau de distribution traditionnel. Il est
particulièrement intéressant de souligner les possibilités offertes par l’énergie éolienne en ce qui
concerne le désenclavement de régions peu urbanisées et ses applications dans les pays en voie de
développement.
II.4.MACHINES A AXE VERTICAL
Elles sont très peu mises en œuvre de nos jours car elles sont moins performantes que celles à axe
horizontal. La conception verticale offre l’avantage de mettre le multiplicateur et la génératrice au sol
directement facilement ainsi les opérations de maintenance, mais cela impose que l’éolienne
fonctionne avec le vent proche du sol, moins fort qu’en hauteur car freiné par le relief, ce qui induit un
faible rendement de ce type d’éolienne. De par son axe vertical, il y a symétrie de révolution et le vent
provenir de toutes les directions sans avoir à orienter le rotor. Par contre, ce type d’éolienne ne peut
pas démarrer automatiquement, il faut la lancer dès l’apparition d’un vent suffisamment fort pour
permettre la production. Ils sont classés selon leur caractéristique aérodynamique en deux familles ; les
aérogénérateurs conçus sur la base de la portance (Aérogénérateurs à rotor de Darrieus : conçu par
l’ingénieur français George Darrieus) et ceux basés sur la traînée (Aérogénérateurs à rotor de Savonius
: inventé par le finlandais Siguard Savonius en 1924).
II.4.1.Eoliennes à rotor de Darrieus
Ce type d’aérogénérateur est basé sur le fait qu’un profil placé dans la direction d’écoulement de
l’air est soumis à des forces de direction et d’intensité variables selon l’orientation de ce profil (Fig.
II.1).

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
27
La résultante de ces forces génère un couple moteur entraînant l’orientation du dispositif.
Fig. II.1. Eolienne à axe vertical (Structure de Darrieus)
I.4.2. Eoliennes à rotor de Savonius
Ils sont basés sur le principe de la traînée différentielle qui stipule qu’un couple moteur peut être
obtenu par une pression différente exercée par le vent sur les parties concaves et convexes de la
structure (Fig. II.2).
Fig. II.2. Eolienne à axe vertical (Structure de Savonius)
Les principaux avantages des éoliennes à axe vertical sont les suivants :
Accessibilité de la génératrice et du multiplicateur mis directement au sol, ce qui facilite la
maintenance et l’entretient.
La non nécessité d’un système d’orientation du rotor car le vent peut faire tourner la structure quel
que soit sa direction. Cependant elles ont comme inconvénients les points suivants:
Faible rendement et fluctuations importantes de puissance,
Occupation importante du terrain pour les puissances élevées,
Faible vitesse du vent à proximité du sol.
II.4.3.La traînée différentielle Le principe de mise en mouvement de ce type de machine le suivant: les efforts exercés par le
vent sur chacune des faces d’un corps creux sont d’intensités différentes (figure II.3). Il en résulte donc
un couple moteur, que l’on peut utiliser pour entraîner un générateur électrique ou un autre dispositif
mécanique tel qu’une pompe.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
28
Figure II.3. Effet du vent sur un corps creux
L’illustration la plus courante de ce type d’éolienne est le rotor de Savonius (figure II.2), du
nom de son inventeur, un ingénieur finlandais qui l’a breveté à la fin des années 1920. Le
fonctionnement est ici amélioré par la circulation de l’air rendue possible entre les deux demi-
cylindres, ce qui augmente le couple moteur. On peut aisément imaginer que, lors du démarrage de ce
type de machine (phase d’établissement du vent), les cylindres soient orientés par rapport au vent de
telle manière que le couple résultant soit nul. L’éolienne ne pourra donc pas démarrer spontanément.
La superposition de plusieurs rotors identiques, mais décalés d’un certain angle l’un par rapport à
l’autre, permet de remédier à ce problème, rendant ainsi la machine totalement autonome.
Figure II.4 .Rotor de Savonius
Le rotor de Savonius, étant très simple, présente un intérêt pour les pays très peu industrialisés
car il est facile à fabriquer. Il a été développé aussi pour de petites éoliennes conçues pour la
navigation de plaisance (recharge de batteries). De plus, il démarre à de faibles vitesses de vent, de
l’ordre de 2 m/s. Les dimensions des machines à rotor de Savonius restent toutefois modestes, 3 à 4 m
de hauteur maximale pour des diamètres de 2 m environ.
II.4.4.Variation cyclique d’incidence
Le fonctionnement est ici basé sur le fait qu’un profil placé dans un écoulement d’air selon
différents angles est soumis à des forces d’intensités et de directions variables. La combinaison de ces

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
29
forces génère alors un couple moteur. En fait, les différents angles auxquels sont soumis les profils,
proviennent de la combinaison de la vitesse propre de déplacement du profil (en rotation autour de
l’axe vertical) et de la vitesse du vent. Ce principe de fonctionnement a été breveté au début des années
1930 par le Français Darrieus. De tels rotors peuvent être de forme cylindrique, tronconique,
parabolique... (Figure II.5).
Figure II. 5. Différents types de rotor de Darrieus
II.4.4.1.Avantages et inconvénients des éoliennes à axe vertical
Le principal avantage des machines à axe vertical est que le dispositif de génération électrique
repose sur le sol, ne nécessitant donc pas l’édification d’une tour. Par ailleurs, une éolienne à axe
vertical fonctionne quelle que soit la direction d’où souffle le vent, permettant donc de s’affranchir
d’un dispositif d’orientation de la machine.
En revanche, le fait qu’une telle éolienne soit érigée près du sol signifie que le capteur
d’énergie se situe dans une zone peu favorable, ce qui réduit significativement l’efficacité de la
machine. Par ailleurs, le principe même de fonctionnement, basé sur des variations incessantes de
charge aérodynamique sur les pales, fait que ces éoliennes sont très sujettes aux problèmes
d’aéroélasticité. Enfin, pour des éoliennes de grande puissance, la surface occupée au sol par le
haubanage est très conséquente.
II.5.MACHINES A AXE HORIZONTAL Ces machines sont les descendantes directes des moulins à vent sur lesquels les ailes, faites de
voiles tendues sur une structure habituellement en bois, ont été remplacées par des éléments
ressemblant fortement à des ailes d’avion. La portance de ces ailes placées dans le vent ne sert pas ici à
sustenter un aéronef mais à générer un couple moteur destiné à entraîner un dispositif mécanique tel
qu’une génératrice électrique, une pompe... Ces machines présentent généralement un nombre de pales
compris entre 1 et 3 et peuvent développer des puissances élevées (plusieurs mégawatts). Leur axe de
transmission est parallèle au sol. Une catégorie particulière d’éolienne à axe horizontal est celle des
machines multipales de faible diamètre (jusqu’à 10 m environ). La masse importante de la roue
aubagée, les vitesses de rotation peu élevées (en regard du diamètre) font que ces machines de faible
puissance sont utilisées principalement pour le pompage de l’eau. Cependant, une application récente
de ce type de machine (avec des diamètres de l’ordre du mètre) est la génération électrique à bord de
bateaux de plaisance ou de course au large.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
30
I.5.1.Les éoliennes à marche lente Les éoliennes à marche lente sont munies d’un grand nombre de pales (entre 20 et 40), leur
inertie importante impose en général une limitation du diamètre à environ 8 m. Leur coefficient de
puissance atteint rapidement sa valeur maximale lors de la montée en vitesse mais décroît également
rapidement par la suite. De nombreuses éoliennes de ce type ont été construites aux Etats Unis dès
1870. Leur rendement est faible car leur vitesse en bout de pale est limitée.
I.5.2.Les éoliennes à marche rapide Les éoliennes à marche rapide sont beaucoup plus répandues et pratiquement toutes dédiées à la
production d’énergie électrique. Elles possèdent généralement entre 1 et 3 pales fixes ou orientables
pour contrôler la vitesse de rotation. Les pales peuvent atteindre des longueurs de 60 m pour des
éoliennes de plusieurs MW. Leur coefficient de puissance atteint des valeurs élevées et décroît
lentement lorsque la vitesse augmente. Elles fonctionnent rarement en dessous d’une vitesse de vent de
3 m/sec. Les machines uni et bipales ont l’avantage de peser moins, mais elles produisent plus de
fluctuations mécaniques et ont un rendement énergétique un peu plus faible. Elles sont visuellement
moins esthétiques. Ceci explique pourquoi 80% des fabricants optent pour des aérogénérateurs tripales.
II.6.LES COMPOSANTES D’UNE EOLIENNE On peut considérer trois composants essentiels dans une éolienne, le rotor, la nacelle et la tour,
comme illustré sur la figure II.7.
Figure II.7. Composantes d’une éolienne
II.6.1.Le rotor et ses pales C’est le capteur d’énergie qui transforme l’énergie du vent en énergie mécanique. Le rotor est
un ensemble constitué des pales (d’un nombre variable) et de l’arbre primaire, la liaison entre ces
éléments étant assurée par le moyeu. Sur certaines machines, l’arbre primaire qui tourne à faible
vitesse comporte un dispositif permettant de faire passer des conduites hydrauliques entre la nacelle

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
31
(repère fixe) et le moyeu (repère tournant). Cette installation hydraulique est notamment utilisée pour
la régulation du fonctionnement de la machine (pas des pales variable, freinage du rotor.)
a) Le rotor
L’utilisation de rotor à trois pales est prédominante dans l’ensemble des machines de moyenne
et grande puissance (> 30 kW), exploitées ou construites dans le monde soit environ 80 % du marché.
En termes de poids, une éolienne monopale doit être munie d’une masse inerte permettant
l’équilibrage de la pale : elle est donc sensiblement équivalente à une machine bipale.
Dynamiquement, la configuration tripale est la plus équilibrée. Elle doit cependant accepter un
chargement cyclique plus important. Aérodynamiquement, les études montrent un léger avantage à
posséder plusieurs pales (réduction des pertes d’extrémités). On augmente ainsi le coefficient de
puissance d’environ 10 % en passant d’une pale à deux, de 3 % en passant de deux à trois, de 1 % en
passant de trois à quatre, etc.
Le choix résulte donc d’un compromis entre l’efficacité aérodynamique du rotor, le poids, la
dynamique des structures et le prix associé.
b) Les pales
La pale d’une éolienne est en réalité le véritable capteur de l’énergie présente dans le vent. De
ses performances dépend la production d’énergie de l’installation, puis par conséquent l’intérêt
économique de la machine.
La conception d’une pale doit faire appel à un compromis délicat entre le rendement
aérodynamique, la légèreté, la résistance statique, la tenue en fatigue.
Ainsi le choix des profils, leur répartition en envergure, la forme en plan (évolution de la corde en
fonction de l’envergure) et le vrillage de la pale doivent être soigneusement étudiés. Par exemple,
selon le type de régulation choisi et selon la taille de l’éolienne, le vrillage pourra différer
significativement d’une machine à l’autre.
Pour une machine de grande taille à pas variable, on pourra envisager de démarrer la rotation
en s’aidant du générateur utilisé en moteur. Par contre, pour une petite éolienne régulée au décrochage,
le vrillage, notamment au pied de la pale, devra permettre un démarrage autonome de la machine. À
ces contraintes s’ajoutent bien évidemment les critères relatifs au vent que la machine devra « utiliser
». Les constructeurs sont ainsi amenés à proposer différents types de pales pour une même puissance
en fonction de la vitesse moyenne rencontrée sur les sites d’implantation.
Après le choix d’une première configuration aérodynamique, il faut concevoir une structure
résistante et légère. Là encore, les conditions de vent (vitesses, taux de turbulence) influent sur la
conception (charges extrêmes, tenue en fatigue). On s’aperçoit donc aisément que la conception d’une
pale est en fait un procédé itératif avec de nombreux paramètres et de nombreuses contraintes. Il est
indéniable que l’apparition de logiciels de calcul évolués associés à des optimiseurs facilite
grandement la tâche du concepteur.
II.6.2.La nacelle La nacelle est une véritable salle des machines perchée dans le ciel. Elle comporte une ou deux
génératrices, une boîte de vitesses, un système de freins à disque et différents équipements automatisés

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
32
d’asservissement. On construit maintenant des éoliennes énormes de 1 500 kW sur des tours de près de
50 mètres et qui sont surtout limitées non par la technologie, mais par les grues gigantesques qu’elles
nécessitent. La figure 8 présente une coupe de la nacelle avec ses différents composants :
Figure II.8. Eléments de la nacelle
A. Le multiplicateur de vitesse :
Il sert à élever la vitesse de rotation entre l’arbre primaire et l’arbre secondaire qui entraîne la
génératrice électrique. En effet, la faible vitesse de rotation de l’éolienne ne permettrait pas de générer
du courant électrique dans de bonnes conditions avec les générateurs de courant classiques. La boîte de
vitesse permet d’avoir un rotor tournant lentement (30 à 40 tours/min) pouvant se coupler à un
générateur de série, donc peu cher, qui tourne lui 40 à 50 fois plus vite. Dans les pays froids on doit
réchauffer ces grosses boîtes d’engrenages.
B. L’arbre secondaire :
L’arbre secondaire comporte généralement un frein mécanique qui permet d’immobiliser le
rotor au cours des opérations de maintenance et d’éviter l’emballement de la machine.
C. La génératrice :
C’est elle qui convertit l’énergie mécanique en énergie électrique. C’est un alternateur. Les plus
simples et robustes sont des générateurs à induction, mais il faut alors contrôler leur excitation par des
condensateurs ou les relier au réseau, ce qui n’est pas facile. On doit essayer de stabiliser la vitesse de
ces moteurs asynchrones près de leur puissance nominale (vers 1 800 tours) pour avoir en bout de
ligne une fréquence et une tension régulières. Voilà pourquoi certains fabricants installent 2
génératrices, l’une exploitant les basses vitesses de vent, l’autre pour les hautes vitesses.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
33
On peut utiliser une génératrice auto excitée : un moteur synchrone à aimants permanents. Plus facile à gérer, ce type d’alternateur est plus cher et comporte de nombreuses pièces mécaniques. Enfin, l’avenir pourrait bien se situer dans les génératrices à basse vitesse car elles suppriment tout recours à un multiplicateur. La nouvelle génératrice discoïde de Jeumont Industrie est une innovation majeure car elle réduit la taille, normalement imposante, de ces alternateurs multi pôles. Toutefois, le courant produit doit passer par un onduleur de grande puissance. Il s’agit là aussi d’une technologie de pointe.
Ces équipements peuvent nécessiter un système de refroidissement liquide, ce qui leur permet d’avoir une taille plus réduite. Ci-contre : le plan d’une nacelle éolienne conventionnelle. On y voit le rotor, la boîte de vitesses puis la génératrice. Ci-contre le plan des éoliennes dites « à attaque directe », c’est à dire qui ne possède pas de multiplicateur mais doivent alors disposer d’un alternateur spécialement conçu, à aimants permanents, synchrone. De tels alternateurs sont importants en taille et nécessitent la conception d’un onduleur assez complexe.
D. Un contrôleur électronique :
Il est chargé de surveiller le fonctionnement de l’éolienne. Il s’agit en fait d’un ordinateur qui
peut gérer le démarrage de la machine lorsque la vitesse du vent est suffisante (de l’ordre de 5 m/s),
gérer le pas des pales, le freinage de la machine, l’orientation de l’ensemble rotor + nacelle face au
vent de manière à maximiser la récupération d’énergie et réduire les efforts instationnaires sur
l’installation. Pour mener à bien ces différentes tâches, le contrôleur utilise les données fournies par un
anémomètre (vitesse du vent) et une girouette (direction du vent), habituellement situés à l’arrière de la
nacelle. Enfin, le contrôleur assure également la gestion des différentes pannes éventuelles pouvant
survenir.
E. Le dispositif d’orientation de la nacelle :
Il permet la rotation de la nacelle à l’extrémité supérieure de la tour, autour de l’axe vertical.
L’orientation est généralement assurée par des moteurs électriques, par l’intermédiaire d’une couronne
dentée. De nombreuses éoliennes comportent un système de blocage mécanique de la position de la
nacelle suivant une orientation donnée : cela évite de solliciter constamment les moteurs et permet
aussi de bloquer l’éolienne durant les opérations de maintenance. Le dispositif d’orientation comprend
un compteur de tours, de manière à éviter de tordre inconsidérément le câble acheminant l’énergie
électrique provenant de la génératrice jusqu’au pied de la tour. Au bout d’un certain nombre de tours
de la nacelle, celle-ci est alors manœuvrée en sens inverse à l’aide des moteurs d’orientation pour
dévriller le câble. On trouve aussi divers dispositifs de refroidissement par ventilateurs, radiateurs
d’eau ou d’huile et un groupe hydraulique.
II.6.3.La tour
Son rôle est d’une part de supporter l’ensemble rotor + nacelle pour éviter que les pales ne
touchent le sol, mais aussi de placer le rotor à une hauteur suffisante, de manière à sortir autant que
possible le rotor du gradient de vent qui existe à proximité du sol, améliorant ainsi la captation de
l’énergie. Trois grands types de tour peuvent se rencontrer :
1) mât haubané :
Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
34
Il est simple de construction mais s’adresse essentiellement aux machines de faible puissance. Une
intervention au niveau de la nacelle nécessite en général de coucher le mât. Il présente toutefois
l’avantage de pouvoir soustraire l’éolienne à des conditions météorologiques extrêmes (forte tempête,
cyclone).L’emprise au sol du haubanage peut devenir un obstacle à son utilisation.
2) tour en treillis :
Son avantage essentiel est sa simplicité de construction, qui la rend attractive pour les pays en voie de
développement. Pour des machines de grande taille, son aspect inesthétique devient un handicap
certain.
3) tour tubulaire :
Bien que de construction plus complexe, elle a la faveur des constructeurs car elle permet d’abriter
certains dispositifs de régulation ou de commande et apporte une protection évidente aux personnels
chargés de la maintenance qui doivent grimper jusqu’à la nacelle (installation aisée d’une échelle voire
d’un ascenseur intérieur). Son aspect esthétique est de plus un atout pour l’intégration visuelle
harmonieuse de l’éolienne.
Pour les petites éoliennes, la solution la moins coûteuse est un tuyau en sections qui se trouve
amplement haubané. La dimension du tuyau d’acier est surtout fonction du poids de l’éolienne, car ce
sont les haubans qui assurent la stabilité de l’ensemble. Plus il y a de haubans et de structure porteuse,
plus le bruit est élevé dans les grands vents. Les tours en treillis sont les moins chères, mais souvent
mal acceptées. La dernière alternative, la tour tubulaire est beaucoup plus élégant, (aucun hauban n’est
alors nécessaire) mais le prix d’une telle tour peut atteindre trois ou quatre fois celui d’un pylône
haubané. La solidité de la fondation deviendra un élément important. C’est la solution pour les grandes
éoliennes.
Remarque : la fondation
Avec ses 400 tonnes de ciment et de fer d’armature, c’est un élément important d’une grande éolienne.
La forme est ronde ou carrée mais peut aussi être en étoile pour réduire l’usage du ciment.
II.7.PRINCIPES DE FONCTIONNEMENT
Le rotor d’une éolienne fonctionne suivant le même principe que toute autre hélice. Les
développements qui vont suivre s’attacheront à préciser les aspects, notations ou notions propres à
l’univers de l’éolien.
II.7.1.Fonctionnement aéromoteur
Les modes de fonctionnement d’une hélice peuvent être représentés de la façon suivante (figure
II.9) : Un élément de pale, situé à un rayon r, est soumis à un flux local de vitesse relativeW
. Celui-ci

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
35
engendre un moment M et une force résultante P
. Cette force peut se décomposer en une force de
tractionT
, suivant l’axe de l’hélice, et une force dans le plan rotor F
, responsable d’un couple C = Fr.
Le domaine A correspond à celui d’une hélice tractrice où l’énergie est fournie au fluide par l’élément
de pale (avion). Lorsque la résultante P
se situe dans le domaine C, c’est le fluide qui fournit de
l’énergie à la pale : on se trouve alors dans le cas d’un fonctionnement aéromoteur caractéristique des
éoliennes.
Figure II.9.Comportement d’une pale dans un flux
II.7.1.1.Formule de Betz Lorsque l’hélice est aéromotrice, le flux est ralenti au passage du disque rotor (figure II.10) :
V0 > V1 > V2
(1)
V0 vitesse axiale initiale du vent
S0 surface à l’entrée du tube de
courant
V1 vitesse du vent dans le plan
du rotor
S1 surface du rotor
V2 vitesse du vent à l’aval du
rotor

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
36
Figure II.10.Représentation du tube de courant
En appliquant la théorie de Froude (et les hypothèses associées), on obtient :
Pour la puissance absorbée par le rotor :
)²( 2011 VVVSP
(2)
Avec ρ (kg.m-3) masse volumique de l’air.
Pour la variation de l’énergie cinétique par seconde de la masse d’air :
cE = ²)²(2
12011 VVVS
(3)
P= cE donne :
220
1
VVV
et l’expression de P correspondante.
(4)
L’étude de la variation de la puissance en fonction de la vitesse à l’aval, 2dV
dP, fournit une seule racine
ayant un sens physique : 3
02
VV , correspondant au maximum de puissance. En définissant le
coefficient de puissance CP=3
012
1VS
P
, on aboutit à la limite de Betz, première personne ayant
développé la théorie globale du moteur éolien à axe horizontal :
593.027
16
MAXPC
Qui caractérise la limite maximale de l’énergie, due à la masse d’air amont, susceptible d’être captée par une éolienne.
(5)
Ce coefficient de puissance permet de classer les différents types d’éoliennes suivant leur nature
(figure II.11).
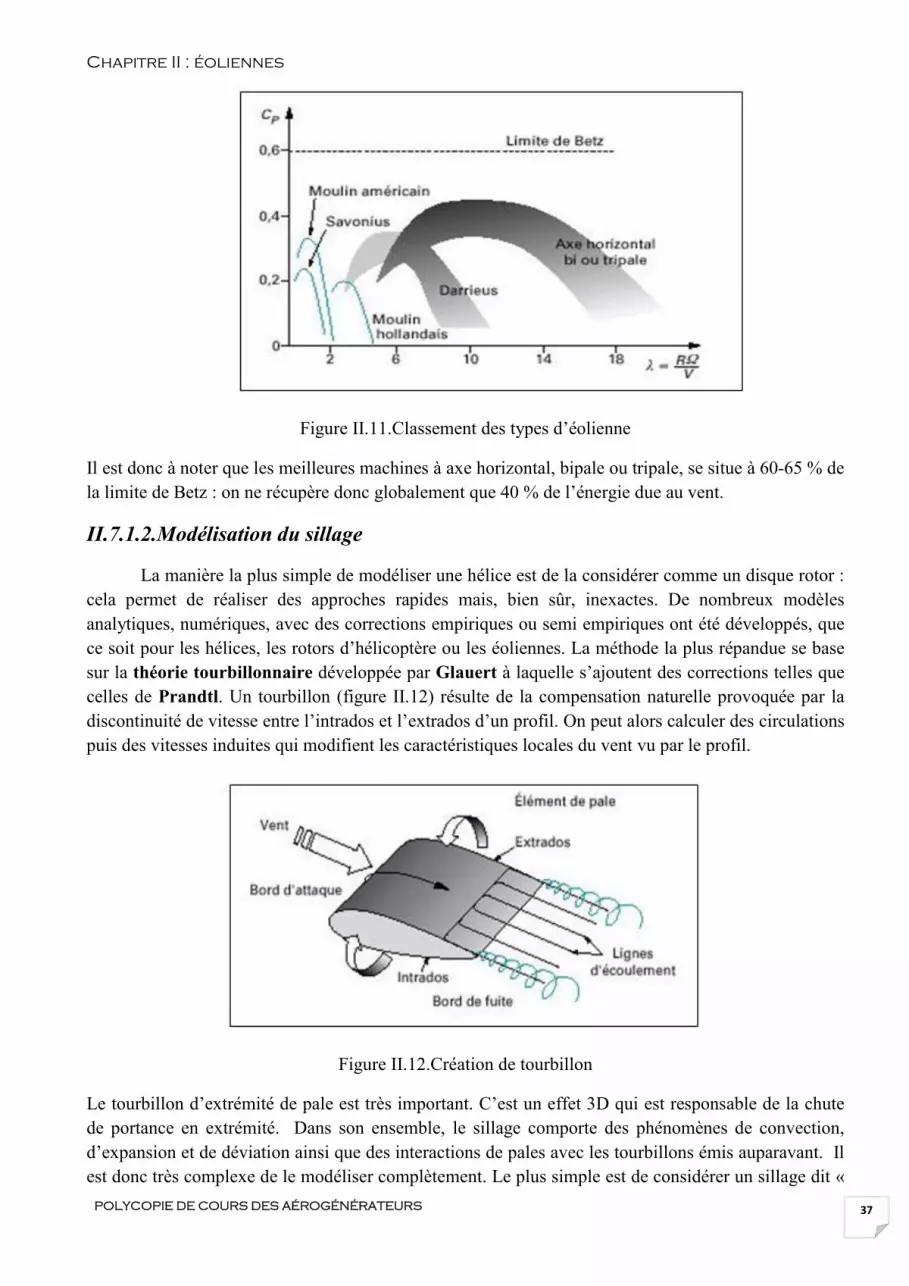
Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
37
Figure II.11.Classement des types d’éolienne
Il est donc à noter que les meilleures machines à axe horizontal, bipale ou tripale, se situe à 60-65 % de
la limite de Betz : on ne récupère donc globalement que 40 % de l’énergie due au vent.
II.7.1.2.Modélisation du sillage
La manière la plus simple de modéliser une hélice est de la considérer comme un disque rotor :
cela permet de réaliser des approches rapides mais, bien sûr, inexactes. De nombreux modèles
analytiques, numériques, avec des corrections empiriques ou semi empiriques ont été développés, que
ce soit pour les hélices, les rotors d’hélicoptère ou les éoliennes. La méthode la plus répandue se base
sur la théorie tourbillonnaire développée par Glauert à laquelle s’ajoutent des corrections telles que
celles de Prandtl. Un tourbillon (figure II.12) résulte de la compensation naturelle provoquée par la
discontinuité de vitesse entre l’intrados et l’extrados d’un profil. On peut alors calculer des circulations
puis des vitesses induites qui modifient les caractéristiques locales du vent vu par le profil.
Figure II.12.Création de tourbillon
Le tourbillon d’extrémité de pale est très important. C’est un effet 3D qui est responsable de la chute
de portance en extrémité. Dans son ensemble, le sillage comporte des phénomènes de convection,
d’expansion et de déviation ainsi que des interactions de pales avec les tourbillons émis auparavant. Il
est donc très complexe de le modéliser complètement. Le plus simple est de considérer un sillage dit «

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
38
prescrit » où la géométrie de l’ensemble est figée sur les premiers tours (figure II.13). Enfin, certains
développements utilisent maintenant un sillage dit libre.
Figure II.13.Modèle de sillage en trois domaines
II.7.3.Aéroélasticité
II.7.3.1.Sollicitations
Une éolienne est une machine permettant la transformation de l’énergie cinétique du vent en
énergie mécanique par conversion d’efforts d’origine aérodynamique en couple moteur. Cependant, les
efforts aérodynamiques ne sont pas les seuls efforts à s’exercer sur une éolienne lors de son
fonctionnement. Il faut également considérer les efforts d’origine inertielle (gravité, force centrifuge,
efforts gyroscopiques) et les efforts d’origine élastique (déformations des pales). La prise en compte
des interactions mutuelles de ces efforts — aérodynamiques, inertiels et élastiques — constitue
l’étude aéroélastique d’une éolienne.
II.7.3.1.1.Modélisation
L’ensemble d’une éolienne, pales, moyeu, arbres, multiplicateurs, génératrice, tour, peut être
représenté comme illustré sur la figure II.14. L’étude de certains sous-ensembles de ce modèle (ligne
d’arbres, tour) n’est pas spécifique au cas des éoliennes et ne sera donc pas abordée ici. On se
consacrera plus particulièrement au comportement des pales et aux sollicitations qu’elles transmettent
au moyeu puis à l’ensemble de la machine.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
39
Figure II.14. Modélisation d’une éolienne
La figure II.15 présente les angles et repères caractéristiques d’une éolienne.
Figure II.15.Angles caractéristiques
a) Modes de pale
L’étude dynamique de structures élancées et souples telles que les pales fait généralement appel à des
résolutions basées sur l’utilisation de modèles de type éléments finis. Ces derniers permettent une
description détaillée du mouvement des pales en prenant en considération un nombre élevé de modes,
éventuellement couplés, de la structure.
Une modélisation simplifiée est ici utilisée, faisant l’hypothèse que seuls les premiers modes de
flexion (battement, traînée) encastrés d’une pale sont retenus (figure II.16). De plus, un tel mode d’une
pale réelle est approximé par le mode de corps rigide d’une pale articulée par l’intermédiaire d’un
ressort (figure II.17). On considère également que la masse de la pale équivalente est uniformément
répartie en envergure.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
40
Figure II.16. Exemple de deux premiers modes encastrés
Figure II.17.Premier mode de flexion
b) Equations du mouvement d’une pale
Trois mouvements distincts sont à considérer dans le cas d’une pale d’éolienne : battement, traînée et
torsion. En dehors de l’influence des efforts aérodynamiques, la figure II.18 présente les sollicitations
auxquelles est soumis un élément d’une pale articulée en battement. Si l’on considère la réduction des
moments au niveau de l’articulation et en faisant l’hypothèse que l’angle de battement reste petit, on
obtient l’expression suivante qui décrit le mouvement de battement de la pale :
Figure II.18.Mouvement de battement
0]cos²
1²[ 1
bI
KG
(6)
Avec,
)1(2
31
b
pp
I
rgMG
β angle de battement Ω vitesse de rotation Ψ azimut Kβ raideur de l’articulation de battement
Voir figure II.15

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
41
Ib moment d’inertie en battement g accélération due à la pesanteur Mp masse d’une pale rg rayon de centre de gravité de la pale εβ excentricité de l’articulation de battement De la même manière (figure II.19), on obtient l’équation du mouvement de la traînée :
Figure II.19.Mouvement de traînée
0sin2]cos²[ 2 GI
KG
b
(7)
Avec
)1(2
32
Kδ raideur de l’articulation de traînée
εδ excentricité de l’articulation de traînée (ramenée au rayon R de la pale)
Enfin, l’équation du mouvement en torsion (figure II.20) s’écrit :
0]²[
tI
K
(8)
Avec θ angle de torsion Kθ raideur de l’articulation de torsion It moment d’inertie en torsion

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
42
En observant les termes de ces différentes équations, on peut faire les remarques suivantes :
En l’absence d’excentricité, de gravité et de ressort d’articulation, la pale est animée d’un
mouvement de battement dont la vitesse est égale à la vitesse de rotation de l’éolienne ;
L’effet de l’excentricité conduit à une fréquence de battement supérieure à la fréquence de rotation.
Par contre, en présence d’une excentricité, la fréquence de traînée est inférieure à la fréquence de
rotation ;
La présence du ressort augmente la fréquence du mouvement (battement, traînée, torsion).
On constate ainsi qu’en jouant sur quelques paramètres simples (excentricités, raideurs), il est possible
de positionner les fréquences des premiers modes de la pale par rapport à la vitesse de rotation. Cela
est particulièrement intéressant pour éviter des phénomènes de résonance avec certains modes du reste
de la machine (tour, multiplicateur...).
II.8.IMPACTS DIVERS
L’implantation d’une éolienne et, a fortiori, d’une ferme éolienne doit prendre en compte des
critères très différents : environnementaux, économiques, politiques, sociologiques... Pour obtenir
l’autorisation d’implantation d’éoliennes en France, il est obligatoire de procéder à une étude d’impact
environnemental, à la fois pour mesurer les problèmes éventuels et assurer une certaine transparence et
communication avec la population et les organismes locaux.
• Interférence électromagnétique :
La réflexion des signaux sur les pales du rotor, structure tournante, peut provoquer d’éventuelles
interférences sur les systèmes de télécommunication, TV, radars... Une concertation avec les
organismes militaires et civils concernés est donc requise.
• Impact visuel :
L’influence sur le paysage doit être consciencieusement étudiée et présentée pour éviter de mener à
l’annulation d’un projet. Même si certaines populations sont plutôt volontaires pour l’arrivée d’une
technologie propre, il ne faut pas provoquer une situation de rejet. Des études sur l’éblouissement ou,
principalement, l’ombre provoquée par la présence d’une machine sur les habitations peuvent être
conduites. Des images de synthèse sont élaborées pour montrer l’impact visuel. Dans la plus grande
Figure II.20.Mouvement de torsion

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
43
majorité des cas, les enquêtes réalisées montrent une réelle acceptation des populations voisines ou
visitant un site éolien.
• Faune :
De nombreuses études ont été menées, dans les pays fortement développés en matière d’énergie
éolienne, suite à des mouvements de protestation. Le fonctionnement propre de l’aérogénérateur n’est
pas à mettre en cause. Les oiseaux réagissent très bien et les risques de collision sont très faibles. La
faune est généralement plus dérangée par l’activité humaine, surtout liée à la construction du site. En
phase d’exploitation, la faune s’adapte et reprend son mode de vie (cas des ours par exemple).
• Bruit :
C’est un critère souvent évoqué, mais qui ne trouve plus de fondement réel. Les nouvelles machines
ont fortement évolué. Les bruits mécaniques ou aérodynamiques ont été réduits par l’utilisation de
nouveaux profils, extrémités de pale, mécanismes de transmission etc. et ne sont plus une gêne, même
proche des machines (50-60 dB équivalent à une conversation). Une distance d’environ huit fois le
diamètre permet de ne plus distinguer aucun bruit lié à cette activité (< 40 dB). De plus, il faut
souligner que le bruit naturel du vent, pour des vitesses supérieures à 8 m/s, a tendance à masquer le
bruit rayonné par l’éolienne.
II.9.INTERETS
Deux faits essentiels dominent le problème de l’utilisation de l’énergie du vent: d’une part, la grande
dilution de cette énergie dans l’espace et, d’autre part, son irrégularité à la fois considérable et
imprévisible. La séduisante gratuité de cette énergie donne toute son importance à l’économie de
construction.
En production d’électricité, le générateur éolien peut fonctionner isolément ou en parallèle avec une
autre source d’énergie électrique, qui doit d’ailleurs être pratiquement beaucoup plus puissante que lui.
Dans ces deux cas, les considérations économiques seront différentes. Le générateur isolé est, le plus
souvent, de puissance assez faible (jusqu’à 10 ou 20 kW), le prix de revient de l’énergie produite,
quoique important, peut être relativement secondaire par rapport aux possibilités de disposer de cette
énergie. Dans ce cas, le groupe éolien est très voisin, du point de vue conception, de l’éolienne
entraînant une pompe centrifuge et les organes de stockage jouent un rôle très important.
Pour un fonctionnement en parallèle avec d’autres sources d’énergie électrique, les puissances sont
beaucoup plus importantes (100 kW et plus) ; le prix de revient minimal du kilowattheure produit est
l’objectif qui imposera le dimensionnement, le choix et la disposition des différents composants. Dans
ce cas, et pour des éoliennes à axe horizontal, il est intéressant de donner des ordres de grandeur
relatifs à chacun des principaux composants :
Une fraction importante de la construction reste constante quelle que soit la vitesse du vent et, d’autre
part, les vents à prendre en considération pour les calculs des efforts sont les vents maximaux et non
les vents moyens.
Il semble que, compte tenu des conditions actuelles de production d’énergie électrique par les autres
sources d’énergie, seuls les sites donnant des vents annuels d’au moins 8 m/s soient susceptibles
d’accueillir des générateurs éoliens suffisamment rentables.
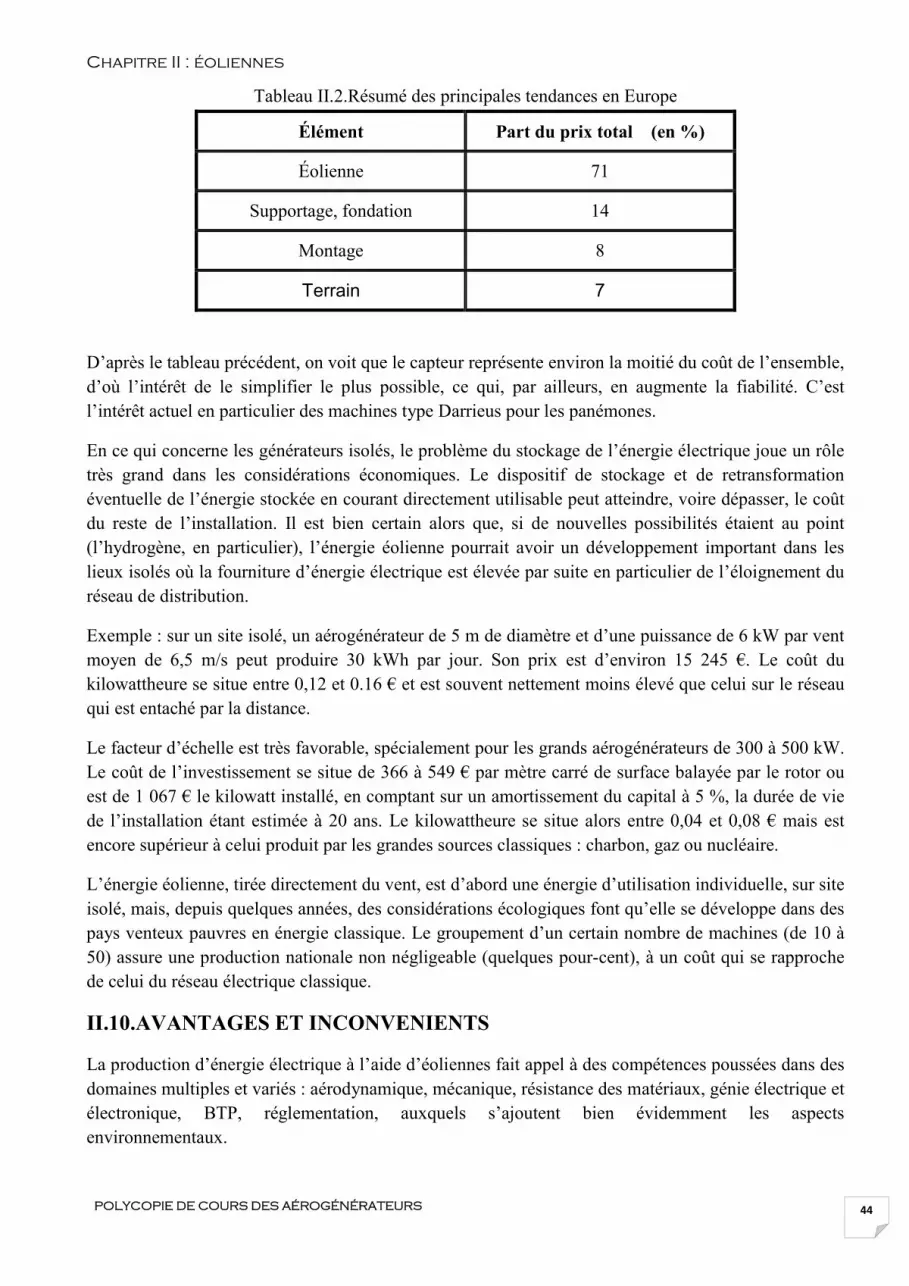
Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
44
Tableau II.2.Résumé des principales tendances en Europe
Élément Part du prix total (en %)
Éolienne 71
Supportage, fondation 14
Montage 8
Terrain 7
D’après le tableau précédent, on voit que le capteur représente environ la moitié du coût de l’ensemble,
d’où l’intérêt de le simplifier le plus possible, ce qui, par ailleurs, en augmente la fiabilité. C’est
l’intérêt actuel en particulier des machines type Darrieus pour les panémones.
En ce qui concerne les générateurs isolés, le problème du stockage de l’énergie électrique joue un rôle
très grand dans les considérations économiques. Le dispositif de stockage et de retransformation
éventuelle de l’énergie stockée en courant directement utilisable peut atteindre, voire dépasser, le coût
du reste de l’installation. Il est bien certain alors que, si de nouvelles possibilités étaient au point
(l’hydrogène, en particulier), l’énergie éolienne pourrait avoir un développement important dans les
lieux isolés où la fourniture d’énergie électrique est élevée par suite en particulier de l’éloignement du
réseau de distribution.
Exemple : sur un site isolé, un aérogénérateur de 5 m de diamètre et d’une puissance de 6 kW par vent
moyen de 6,5 m/s peut produire 30 kWh par jour. Son prix est d’environ 15 245 €. Le coût du
kilowattheure se situe entre 0,12 et 0.16 € et est souvent nettement moins élevé que celui sur le réseau
qui est entaché par la distance.
Le facteur d’échelle est très favorable, spécialement pour les grands aérogénérateurs de 300 à 500 kW.
Le coût de l’investissement se situe de 366 à 549 € par mètre carré de surface balayée par le rotor ou
est de 1 067 € le kilowatt installé, en comptant sur un amortissement du capital à 5 %, la durée de vie
de l’installation étant estimée à 20 ans. Le kilowattheure se situe alors entre 0,04 et 0,08 € mais est
encore supérieur à celui produit par les grandes sources classiques : charbon, gaz ou nucléaire.
L’énergie éolienne, tirée directement du vent, est d’abord une énergie d’utilisation individuelle, sur site
isolé, mais, depuis quelques années, des considérations écologiques font qu’elle se développe dans des
pays venteux pauvres en énergie classique. Le groupement d’un certain nombre de machines (de 10 à
50) assure une production nationale non négligeable (quelques pour-cent), à un coût qui se rapproche
de celui du réseau électrique classique.
II.10.AVANTAGES ET INCONVENIENTS
La production d’énergie électrique à l’aide d’éoliennes fait appel à des compétences poussées dans des
domaines multiples et variés : aérodynamique, mécanique, résistance des matériaux, génie électrique et
électronique, BTP, réglementation, auxquels s’ajoutent bien évidemment les aspects
environnementaux.

Chapitre II : éoliennes
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
45
Si l’implantation d’une machine isolée de faible puissance est relativement aisée, en revanche la
réalisation d’une ferme éolienne de grande puissance, sur terre ou mieux encore en offshore, est un
véritable défi technologique et humain. Toutefois, le développement d’outils informatiques, aptes à
traiter chacune des étapes nécessaires à l’aboutissement d’un projet de grande envergure et à permettre
d’exploiter au mieux les possibilités d’un gisement de vent, permet d’envisager sereinement une part
de plus en plus conséquente de ce type d’énergie dans la production mondiale d’électricité.
Tableau II.3.Avantages et inconvénients
AVANTAGES INCONVENIENTS Rapidité d’installation Investissement élevé
Puissance beaucoup plus élevée que le solaire Pas de rentabilité pour un site relié au réseau
Energie respectueuse de l’environnement Risques causés par vents forts Autonomie énergétique, bon complément à d’autres sources (diesel, solaire)
Surveillance technique

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
46
Chapitre III.
Systèmes Aérogénérateurs
III.1.PRINCIPE DE CONVERSION DE L’ENERGIE
Différents types de machines électriques peuvent être utilisés pour la génération de puissance
éolienne. Des facteurs techniques et économiques fixent le type de machine pour chaque application.
La génératrice peut être liée directement ou indirectement au réseau. Les générateurs
habituellement rencontrés dans les éoliennes sont présentés dans ce qui suit. Avec une éolienne, deux
possibilités s'offrent au particulier concernant la production d'électricité :
La connexion au réseau électrique et donc la revente de son électricité ou bien le recours à un système
autonome pour utiliser directement l'énergie produite.
III.1.1.Mode autonome
Figure III.1. Aérogénérateur fonctionne en mode autonome
Les éoliennes non raccordées au réseau, fonctionnent en mode autonome et alimentent des charges
isolées avec éventuellement un ou plusieurs groupes électrogènes en appui. Pour cette configuration, le
recours à un système de stockage présente un intérêt significatif en cas d'absence de groupes
électrogènes, notamment en cas de vent faible. Le recours à des batteries est utile pour le stockage
d'énergie à long terme. D'autres systèmes de stockage sont envisagés comme le stockage inertiel à
court terme. Le stockage inertiel évite alors l'utilisation de batteries qui présentent un caractère
polluant pour l'environnement. L'énergie se présente sous forme d'énergie cinétique, stockée dans un
volant d'inertie. La génératrice utilisée peut être une machine synchrone à aimants permanents ou une
machine asynchrone à cage munie de capacités indispensables pour son excitation.
III.1.2.Mode connectée au réseau
Les Aérogénérateurs connectées au réseau peuvent être aussi classées selon leur vitesse de rotation.
Celles-ci peuvent être fixes ou variables.
III.1.2.1.Vitesse fixe
Lorsque l'éolienne est connectée au réseau, la vitesse de rotation de la génératrice doit rester
pratiquement constante de façon à ce que la génératrice reste proche de la vitesse de synchronisme,
principal critère pour un fonctionnement stable de la génératrice. La fréquence du réseau impose la
vitesse de rotation de la machine. Le générateur à vitesse fixe, en liaison directe avec le réseau, est
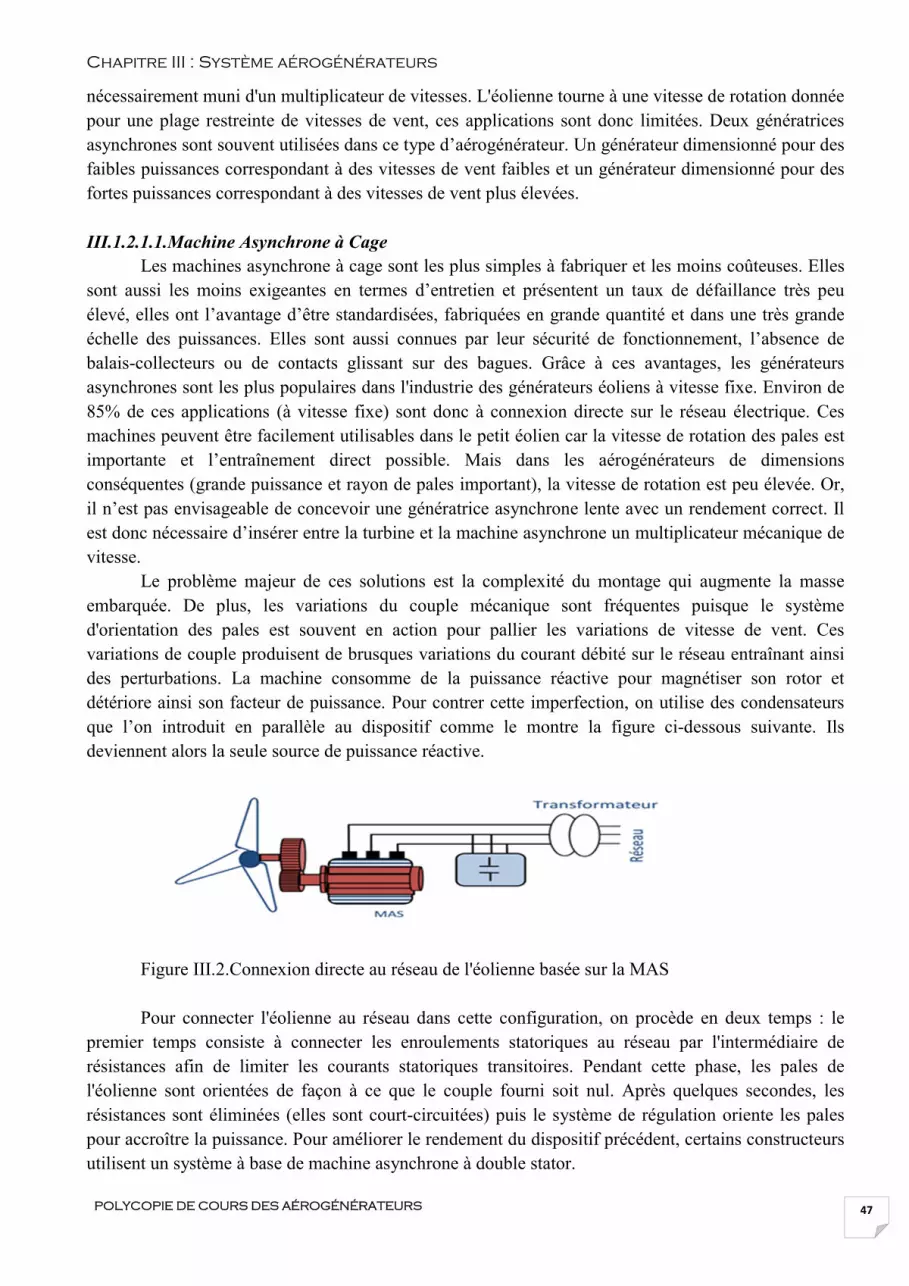
Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
47
nécessairement muni d'un multiplicateur de vitesses. L'éolienne tourne à une vitesse de rotation donnée
pour une plage restreinte de vitesses de vent, ces applications sont donc limitées. Deux génératrices
asynchrones sont souvent utilisées dans ce type d’aérogénérateur. Un générateur dimensionné pour des
faibles puissances correspondant à des vitesses de vent faibles et un générateur dimensionné pour des
fortes puissances correspondant à des vitesses de vent plus élevées.
III.1.2.1.1.Machine Asynchrone à Cage
Les machines asynchrone à cage sont les plus simples à fabriquer et les moins coûteuses. Elles
sont aussi les moins exigeantes en termes d’entretien et présentent un taux de défaillance très peu
élevé, elles ont l’avantage d’être standardisées, fabriquées en grande quantité et dans une très grande
échelle des puissances. Elles sont aussi connues par leur sécurité de fonctionnement, l’absence de
balais-collecteurs ou de contacts glissant sur des bagues. Grâce à ces avantages, les générateurs
asynchrones sont les plus populaires dans l'industrie des générateurs éoliens à vitesse fixe. Environ de
85% de ces applications (à vitesse fixe) sont donc à connexion directe sur le réseau électrique. Ces
machines peuvent être facilement utilisables dans le petit éolien car la vitesse de rotation des pales est
importante et l’entraînement direct possible. Mais dans les aérogénérateurs de dimensions
conséquentes (grande puissance et rayon de pales important), la vitesse de rotation est peu élevée. Or,
il n’est pas envisageable de concevoir une génératrice asynchrone lente avec un rendement correct. Il
est donc nécessaire d’insérer entre la turbine et la machine asynchrone un multiplicateur mécanique de
vitesse.
Le problème majeur de ces solutions est la complexité du montage qui augmente la masse
embarquée. De plus, les variations du couple mécanique sont fréquentes puisque le système
d'orientation des pales est souvent en action pour pallier les variations de vitesse de vent. Ces
variations de couple produisent de brusques variations du courant débité sur le réseau entraînant ainsi
des perturbations. La machine consomme de la puissance réactive pour magnétiser son rotor et
détériore ainsi son facteur de puissance. Pour contrer cette imperfection, on utilise des condensateurs
que l’on introduit en parallèle au dispositif comme le montre la figure ci-dessous suivante. Ils
deviennent alors la seule source de puissance réactive.
Figure III.2.Connexion directe au réseau de l'éolienne basée sur la MAS
Pour connecter l'éolienne au réseau dans cette configuration, on procède en deux temps : le
premier temps consiste à connecter les enroulements statoriques au réseau par l'intermédiaire de
résistances afin de limiter les courants statoriques transitoires. Pendant cette phase, les pales de
l'éolienne sont orientées de façon à ce que le couple fourni soit nul. Après quelques secondes, les
résistances sont éliminées (elles sont court-circuitées) puis le système de régulation oriente les pales
pour accroître la puissance. Pour améliorer le rendement du dispositif précédent, certains constructeurs
utilisent un système à base de machine asynchrone à double stator.

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
48
III.1.2.1.2.Machine Asynchrone à Double Stator
La machine asynchrone à double stator se compose d’un stator portant deux enroulements triphasés
décalés d’un angle électrique de 300, et d’un rotor à cage d’écureuil. L’un des enroulements est
directement connecté au réseau et constitue le principal support de transmission de l’énergie générée
de forte puissance et de petit nombre de paires de pôles pour les vitesses de vent les plus élevées; un
second enroulement appelé enroulement d’excitation de faible puissance à grand nombre de paires de
pôles pour les vitesses les plus faibles. Cette topologie possède deux points de fonctionnement. Les
perturbations sonores de la machine pour des vents faibles sont diminuées du fait que l’orientation des
pales est amoindrie. L’enroulement d’excitation a donc une masse de cuivre ce qui rend la conception
de la machine particulière et augmente le coût et le diamètre de façon non négligeable, ce qui
représente une augmentation du poids et de l’encombrement de l'ensemble.
Figure III.3.Connexion au réseau de l'éolienne avec la machine asynchrone à double stator
III.1.2.2.Vitesse Variable
Pour optimiser la puissance débitée en fonction du vent, il est souhaitable de pouvoir régler la
vitesse de rotation de l'éolienne. L'idée est de réaliser un générateur à fréquence fixe et vitesse
variable. Le générateur à vitesse variable permet de fonctionner pour une large gamme de vents donc
de récupérer un maximum de puissance tout en réduisant les nuisances sonores lors d'un
fonctionnement à faible vitesse de vent. En vitesse variable, on régule le système de façon à ce que
pour chaque vitesse de vent, l'éolienne fonctionne à puissance maximale. C'est ce qu'on appelle le
Maximum Power Point Tracking. La puissance maximale est atteinte pour une vitesse de rotation de la
turbine donnée par la caractéristique de l'éolienne P (Ω).
Figure III.4. Puissance récupérée en fonction de la vitesse de la turbine

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
49
III.1.2.2.1.Système Aérogénérateur utilisant une Génératrice Synchrone
L’avantage du générateur synchrone est l’absence de courant réactif de magnétisation. Le
champ magnétique peut être obtenu par des aimants ou par un bobinage d’excitation conventionnel. Si
l’on utilise une machine synchrone usuelle, le rotor est censé tourner à la même vitesse que le stator.
L’alternateur étant connecté au réseau, la vitesse de rotation doit être un multiple des pulsations de
courants statoriques. Si le générateur possède un nombre suffisant de pôles, il peut être utilisé pour les
applications d’entraînement direct qui ne nécessitent pas de boite de vitesses. L’adaptation de cette
machine à un système éolien pose des problèmes pour maintenir la vitesse de rotation de l’éolienne
strictement fixe et pour synchroniser la machine avec le réseau lors des phases de connexion. Pour ces
raisons, on place systématiquement une interface électronique de puissance entre le stator de la
machine et le réseau ce qui permet d’autoriser un fonctionnement à vitesse variable dans une large
plage de variation.
Figure III.5. Eolienne à génératrice synchrone
Dans le rotor d'une éolienne à génératrice synchrone, on installe normalement des
électroaimants alimentés par un courant continu. Comme le réseau électrique fournit du courant
alternatif, il faut le convertir en courant continu avant qu'il soit envoyé aux bobines roulées autour des
électroaimants du rotor. Les électroaimants du rotor sont branchés au courant au moyen de balais et de
bagues collectrices fixées à l'arbre de la génératrice. Deux types de génératrices sont utilisés, à
bobinage inducteur ou à aimants permanents.
1. Générateur Synchrone à Rotor Bobiné
La connexion directe au réseau de puissance implique que le générateur synchrone tourne à
vitesse constante, laquelle est fixée par la fréquence du réseau et le nombre de pôles de la machine.
L’excitation est fournie par le système de bagues et balais ou par un système "Brushless" avec un
redresseur tournant. La mise en œuvre d’un convertisseur dans un système multipolaire sans
engrenages permet un entraînement direct à vitesse variable. Toutefois, cette solution implique
l’utilisation d’un générateur surdimensionné et d’un convertisseur de puissance dimensionné pour la
puissance totale du système.
2. Générateur Synchrone à Aimants Permanents, (GSAP)
Aujourd’hui la plupart des machines synchrones utilisées dans les petites éoliennes sont des
machines synchrones à aimants permanents par rapport à la machine à excitation. La caractéristique
d’auto excitation du GSAP lui permet de fonctionner avec un facteur de puissance élevé et un bon
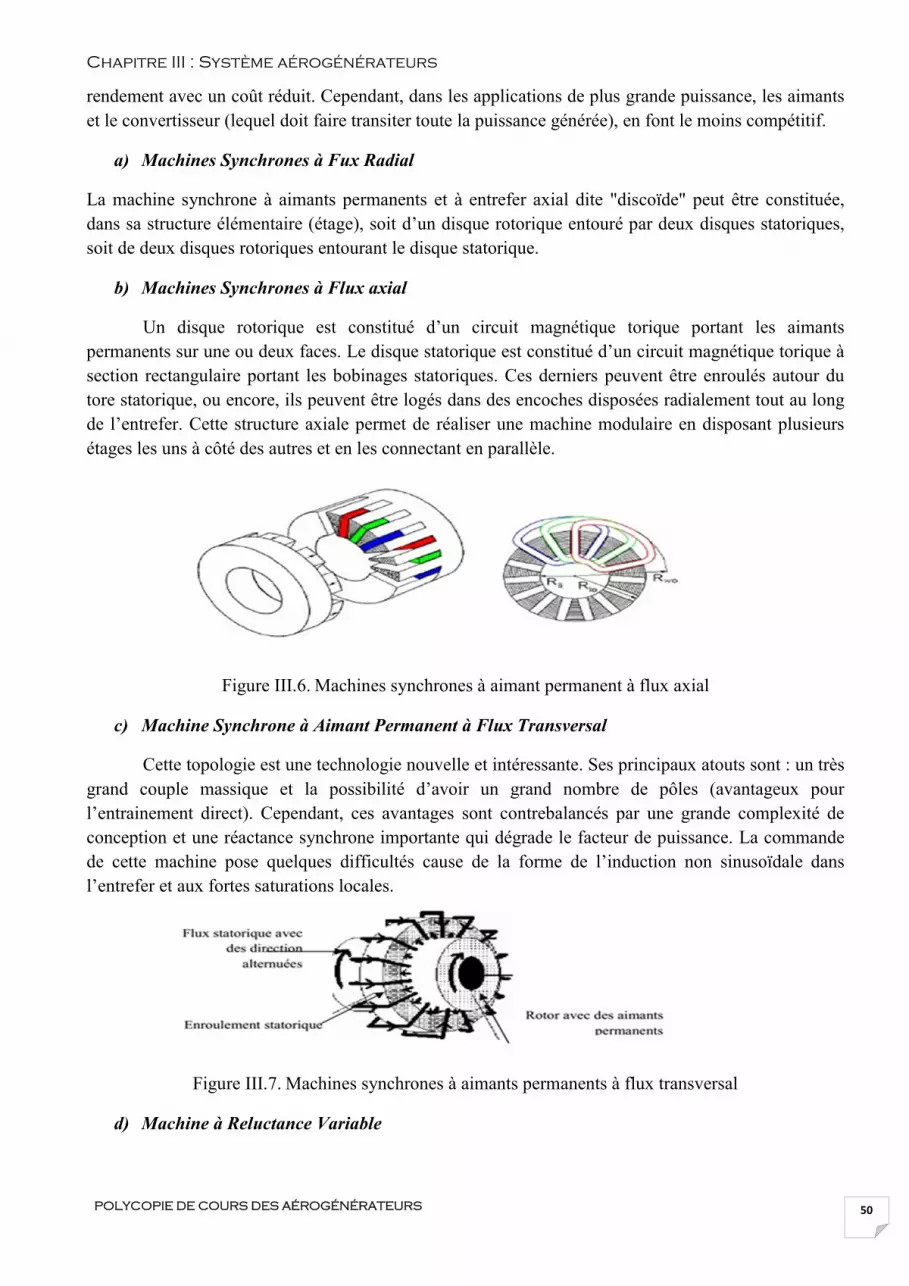
Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
50
rendement avec un coût réduit. Cependant, dans les applications de plus grande puissance, les aimants
et le convertisseur (lequel doit faire transiter toute la puissance générée), en font le moins compétitif.
a) Machines Synchrones à Fux Radial
La machine synchrone à aimants permanents et à entrefer axial dite "discoïde" peut être constituée,
dans sa structure élémentaire (étage), soit d’un disque rotorique entouré par deux disques statoriques,
soit de deux disques rotoriques entourant le disque statorique.
b) Machines Synchrones à Flux axial
Un disque rotorique est constitué d’un circuit magnétique torique portant les aimants
permanents sur une ou deux faces. Le disque statorique est constitué d’un circuit magnétique torique à
section rectangulaire portant les bobinages statoriques. Ces derniers peuvent être enroulés autour du
tore statorique, ou encore, ils peuvent être logés dans des encoches disposées radialement tout au long
de l’entrefer. Cette structure axiale permet de réaliser une machine modulaire en disposant plusieurs
étages les uns à côté des autres et en les connectant en parallèle.
Figure III.6. Machines synchrones à aimant permanent à flux axial
c) Machine Synchrone à Aimant Permanent à Flux Transversal
Cette topologie est une technologie nouvelle et intéressante. Ses principaux atouts sont : un très
grand couple massique et la possibilité d’avoir un grand nombre de pôles (avantageux pour
l’entrainement direct). Cependant, ces avantages sont contrebalancés par une grande complexité de
conception et une réactance synchrone importante qui dégrade le facteur de puissance. La commande
de cette machine pose quelques difficultés cause de la forme de l’induction non sinusoïdale dans
l’entrefer et aux fortes saturations locales.
Figure III.7. Machines synchrones à aimants permanents à flux transversal
d) Machine à Reluctance Variable

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
51
C’est à partir des années 1970 que la MRV prend son essor grâce à l’apparition d’une
électronique de commande performante. La MRV a une structure saillante au rotor et au stator avec un
stator actif où sont situés les bobinages et un rotor massif. Le rotor massif distingue la MRV des
machines synchrones et asynchrones. La MRV présente l’avantage d’une grande simplicité de
construction mécanique, d’un faible coût, d’une bonne robustesse et d’un couple massique élevé. Les
machines à réluctance variable sont actuellement dédiées aux applications éoliennes. Elles possèdent
des caractéristiques intéressantes pour les basses vitesses de rotation. On notera que malgré son
potentiel, la MRV n’a pas encore trouvé son application dans l’éolienne. On distingue plusieurs types
de MRV.
MRV pure : Elle est utilisée dans l’industrie pour les systèmes d’alterno-démarreur, dans les
véhicules hybrides ou les avions mais aussi pour les systèmes de génération d’électricité dans
l’aérospatial.
MRV Vernier : Différemment à la MRV précédente, elle est alimentée par des courants
sinusoïdaux, et excitée au rotor et au stator d’où on peut insérer des convertisseurs électroniques.
La vitesse de rotation est inversement proportionnelle au nombre des dents du rotor.
MRV hybride : Cette machine met en œuvre des aimants surfaciques et exploite l’effet Vernier
avec une alimentation sinusoïdale. Le grand nombre de dents rend cette structure intéressante pour
les forts couples. Cette machine utilise des aimants à terre rare spéciaux afin d’éviter leur
démagnétisation.
MRV à flux axial : Cette machine a été appliquée à la propulsion marine au début des années
1970.
III.2.STRUCTURES DES AEROGENERATEURS BASEE SUR LA MACHINE SYNCHRONE
Plusieurs structures sont possibles pour la machine synchrone :
Un redresseur à diodes, associé ou non à un convertisseur DC/DC, peut être utilisé (figure III.8). Cette
solution est avantageuse sur le plan économique mais la qualité des courants de la génératrice est
moins bonne qu’avec une redresseur MLI; de plus, le nombre de degrés de liberté sur l’ensemble de la
machine de conversion est plus faible (trois contre quatre).
Figure III.8. Machine synchrone liée au réseau par un ensemble redresseur à diode, convertisseur et
onduleur MLI
La machine synchrone avec deux convertisseurs à MLI. Cette structure, permet donc de faire
fonctionner à vitesse variable et donc de maximiser la puissance (figure III.9).

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
52
Figure III.9. Machine synchrone avec deux convertisseurs MLI en cascade.
L'approche utilisée actuellement consiste à mettre en place une topologie utilisant des
convertisseurs (back-to-back) de plusieurs modules connectés en parallèle (Figure III.10). Cette
disposition permet un fonctionnement en mode dégradé en assurant ainsi la production de la puissance
même dans le cas d’une défaillance de l’un des modules.
Figure III.10. MS à aimants permanents utilisant plusieurs modules de convertisseurs statiques à deux
niveaux en parallèle.
Afin d’augmenter la densité de puissance, ABB a développé le convertisseur PCS6000 pour
cette technologie d’éolienne. Ce convertisseur (back-to-back), qui repose sur une architecture multi-
niveaux NPC, est dédié aux applications de moyenne tension (définies par 1- 5 kV) et d’une gamme de
puissance qui arrive jusqu’à 8 MW. Le rendement de ce convertisseur a atteint les 98% grâce aux
composants IGCT utilisés qui sont conçus spécialement pour réduire les pertes de puissance par
commutation. Un autre convertisseur (back-to-back) multi-niveaux NPC « MV7000 » est
commercialisé par la société « Converteam ». Celui-ci est conçu à base d’IGBT et sa gamme de
puissances est similaire à celle du convertisseur PCS6000 fabriqué par ABB.
III.3. STRUCTURES DES AEROGENERATEURS BASEE SUR LA MACHINE
ASYNCHRONE
III.3.1. Générateur Asynchrone à Cage d’Ecureuil
C’est le rotor qui distingue la génératrice asynchrone de la génératrice synchrone. La
génératrice asynchrone à cage n'est en fait que très rarement utilisée, sauf dans l'industrie éolienne. Le
générateur à induction est largement utilisé dans les turbines éoliennes de moyenne et grande
puissance en raison de sa robustesse, sa simplicité mécanique et son coût réduit. Il est très fiable et
relativement peu onéreuse par rapport à d'autres types de génératrices. La demande de puissance

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
53
réactive est compensée par la connexion d’un groupe de condensateurs en parallèle avec le générateur,
ou par la mise en œuvre d’un convertisseur statique de puissance.
Figure III.11. Machine asynchrone à cage d’écureuil
La stabilité du système est effective lorsque la vitesse de rotation reste proche du synchronisme, c'est-
à-dire g≈0. Cette topologie est très simple et ne demande pas beaucoup d’entretien mais consomme de
l’énergie réactive et de ce fait le facteur de puissance est altéré.
III.3.2. Générateur Asynchrone à Rotor bobiné
Trois enroulements sont logés dans les encoches d’un cylindre ferromagnétique feuilleté
constituant le rotor. Celui-ci présente le même nombre de pôles que le stator. Ces enroulements
rotoriques sont reliés à trois bornes par l'intermédiaire de bagues, solidaires du rotor, et de balais
frottant sur ces bagues. Le rotor bobiné doit être fermé sur lui-même directement (mis en court-circuit)
ou par l'intermédiaire de résistances.
Figure III.12. Machine asynchrone à Rotor bobiné
L’excitation est fournie par le système de bagues et balais ou par un système sans balais avec un
redresseur tournant. La mise en œuvre d’un convertisseur dans un système multipolaire sans
engrenages permet un entraînement direct à vitesse variable. On utilise un dispositif d’électronique de
puissance pour adapter la fréquence variable de la machine asynchrone à la fréquence du réseau. Les
enroulements du stator sont connectés aux convertisseurs de puissance. Les deux convertisseurs, par le
biais du bus continu permettent de découpler la fréquence du réseau de la fréquence du stator de la
machine asynchrone.
La configuration présentée dans la figure (III.13) est composée d’une machine asynchrone, d’un
multiplicateur, un redresseur et un onduleur inséré entre le stator de la machine et le réseau. Ceci
augmente considérablement le coût et les pertes qui peuvent avoir une valeur de 3% de la puissance
nominale de la machine. Puisque le redresseur est unidirectionnel, pour la magnétisation de la
machine, on a besoin des condensateurs en parallèle au stator.

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
54
Figure III.13. Connexion indirecte d’une machine asynchrone sur le réseau
Cette configuration permet un fonctionnement de l’éolienne à une vitesse variable du vent, et la
commande MLI vectorielle de l’onduleur adapte la fréquence de la puissance fournie de la machine à
la fréquence du réseau en présence de n’importe quelle vitesse du rotor. Avec cette configuration, la
puissance nominale de la génératrice détermine la puissance maximale de l’éolienne. Toutefois, le
redresseur peut être remplacé par un onduleur, ce qui permet le transfert de la puissance réactive dans
les deux sens (Figure III.14) et ainsi fournir la puissance réactive à la machine asynchrone et éviter les
condensateurs du montage précédent. Une autre structure consiste à utiliser un variateur de fréquence,
mais cette solution est globalement coûteuse (variateur de fréquence dimensionné pour la puissance
transitoire, et multiplicateur de vitesse) et donc très rarement exploitée
Figure III.14. Générateur asynchrone connectée au réseau par l’intermédiaire de deux onduleurs
III.3.3. Système Utilisant la Génératrice Asynchrone à Double Alimentation (GADA)
De nos jours, la machine asynchrone à double alimentation (GADA) est la machine à vitesse
variable la plus couramment utilisée dans des unités de production supérieure à 1MW grâce à ses
caractéristiques. La machine asynchrone à double alimentation (GADA) à rotor bobiné présente un
stator triphasé identique à celui des machines asynchrones classiques et un rotor différent des autres
machines, les enroulements du rotor sont couplés en étoile et les extrémités sont connectées à des
bagues conductrices. Des balais viennent frotter les bagues lorsque la machine fonctionne. Les
enroulements du stator sont directement connectés au réseau alors que les enroulements du rotor
passent par les convertisseurs de puissance bidirectionnels pour assurer la variation du glissement cette
topologie est, actuellement, le meilleur choix des fabricants dans la plupart des projets de centrale
éolienne pour de nombreuse raisons comme la réduction des efforts sur les parties mécaniques, la
réduction du bruit et la possibilité du contrôle des puissances actives et de cette façon, de découpler la
commande des puissances active et réactive, ainsi la possibilité de se magnétiser à partir du rotor sans
prélever au réseau la puissance réactive nécessaire. Il est aussi capable d’échanger de la puissance

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
55
réactive avec le réseau pour assurer la commande de tension. Il vient du fait que c’est le seul schéma
dans lequel la puissance générée peut être supérieure à la puissance nominale de la machine utilisée.
La GADA offre la possibilité de fonctionner dans les quatre quadrants. C'est-à-dire que ce n’est
plus la vitesse de rotation qui définit le mode de fonctionnement en moteur ou en générateur. Lorsque
la GADA fonctionne en génératrice, mode hypo-synchrone une partie de la puissance transitant par le
stator est réabsorbée par le rotor. En mode hyper synchrone, la totalité de la puissance mécanique
fournie à la machine est transmise au réseau aux pertes près. Une partie de cette puissance
correspondant à g.Pmec est transmise par l’intermédiaire du rotor. Grâce à la production ou
l’absorption de la puissance réactive du rotor, la GADA à la possibilité d’assurer le fonctionnement à
facteur de puissance unitaire.
Figure III.15. Aérogénérateur utilisant la MADA.
Une des configurations (figure III.15) en forte croissance dans le marché des turbines éoliennes est
connue sous le nom de générateur asynchrone doublement alimenté (DFIG) dont le stator est relié
directement au réseau de puissance et dont le rotor est connecté à un convertisseur de type source de
tension en (back-to-back), qui fait office de variateur de fréquence. La double alimentation fait
référence à la tension du stator prélevée au réseau et à la tension du rotor fournie par le convertisseur.
Ce système permet un fonctionnement à vitesse variable sur une plage spécifique de fonctionnement.
Le convertisseur compense la différence des fréquences mécanique et électrique par l’injection d’un
courant à fréquence variable au rotor.
III.3.3.1.Machine Asynchrone à Double Alimentation à Energie Rotorique Dissipée
La figure III.16 montre la technologie qui permet une variation limitée de la vitesse à environ 10%
autour de celle de synchronisme par le changement de la résistance rotorique. Outre la plage de
variation de vitesse limitée, l’inconvénient de cette solution est la dissipation de la puissance rotorique
dans les éléments résistifs.
Figure III.16. GADA avec contrôle du glissement par l’énergie dissipée

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
56
III.3.3.2. GADA -Structure de Kramer
Pour augmenter le rendement de la structure du système précédent, cette structure (Figure
III.17) consiste à utiliser un pont à diodes et un pont à thyristors. Les tensions entre bagues sont
redressées par le pont à diodes. L’onduleur à thyristors applique à ce redresseur une tension qui varie
par action sur l’angle d’amorçage des thyristors. Ce dispositif permet de faire varier la plage de
conduction des diodes, de rendre variable la puissance extraite du circuit rotorique et donc le
glissement de la génératrice asynchrone. Mais l’inconvénient de cette structure est que l’alimentation
ne permet pas l’asservissement électrique de la vitesse de la machine. De plus, l’onduleur triphasé
utilisé pour cette structure injecte des courants harmoniques basses fréquences d’amplitude importante.
Figure III.17. GADA structure Kramer
III.3.3.3. MADA Structure de Scherbius avec Cyclo-convertisseur
Afin d'autoriser un flux d'énergie bidirectionnel entre le rotor et le réseau, cette topologie
consiste a remplacée l’association redresseur-onduleur par un cyclo-convertisseur. La plage de
variation de vitesse est doublée par rapport à la structure de la Kramer.
Figure III.18. Structure de Scherbius avec cyclo-convertisseur
Cette structure est aussi connue sous la dénomination (topologie statique Scherbius). Formellement, le
principe de Scherbius est basé sur l’utilisation de machines tournantes au lieu des convertisseurs de
puissance.
III.3.3.4. GADA – Structure de Scherbius avec Convertisseurs MLI
Cette structure consiste à utiliser deux ponts triphasés d’IGBT commandables par modulation de
largeur d’impulsion. Ce choix permet d’agir sur deux degrés de liberté pour chaque convertisseur ; un
contrôle du flux et de la vitesse de rotation de la génératrice asynchrone du côté de la machine et un

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
57
contrôle des puissances active et réactive transitées du côté du réseau. Il est à noter cependant que le
fonctionnement en MLI de l’onduleur du côté réseau permet un prélèvement des courants de meilleure
qualité.
Figure III.19. Structure de Scherbius avec convertisseurs MLI
III.3.3.5. GADA Alimenté par Deux Convertisseurs Indépendants :
On peut également disposer les convertisseurs à la fois au rotor et au stator Ce type
d’alimentation peut prendre différentes formes :
A. Deux cyclo-convertisseurs
Figure III.20. Schéma synoptique pour l’alimentation par deux cyclo-convertisseurs
Ce montage présente un fonctionnement dans les quatre quadrants en précisant le fonctionnement hypo
et hyper-synchrone. Il adopte le contrôle vectoriel pour la commande. Ses objectifs consistent à
minimiser les harmoniques du couple en agissant sur la fréquence du stator et à assurer un
synchronisme des champs tournants en contrôlant les phases des tensions statoriques et rotoriques. Il
centre son intérêt aux échanges énergétiques entre les enroulements rotoriques et statoriques dans
l’entrefer.
B. Deux onduleurs alimentés par leurs propres redresseurs
Figure III.21. Alimentation de la GADA par deux onduleurs avec deux bus continus indépendants.

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
58
Dans cette structure, la MADA offre quatre degrés de liberté : le flux, le couple, la fréquence et le
facteur de puissance et procède à un contrôle indirect du flux d’entrefer en introduisant un courant
magnétisant.
III.3.3.6.Deux onduleurs alimentés en parallèle par un redresseur
Figure III.22. Alimentation de la MADA avec deux onduleurs et un bus continu commun.
III.3.3.7. GADA en Utilisant Plusieurs Modules de Convertisseurs Statiques à Deux Niveaux en
Parallèle.
Figure III.23. GADA en utilisant plusieurs modules de convertisseurs statiques à deux niveaux en
parallèle.
III.3.3.8. GADA en Utilisant un Convertisseur NPC Multiniveaux.
Figure III.24. GADA en utilisant un convertisseur NPC multiniveaux.

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
59
III.3.3.9. Machine Asynchrone à double alimentation en cascade
Figure III.25. Principe de fonctionnement de deux machines asynchrones en cascade.
La structure en cascade (Figure III.25) peut être considérée comme la première réalisation
pratique d’une machine tournante sans balais doublement alimentée. Grâce à l’ensemble
convertisseur/machine-2 on peut maîtriser le courant du rotor 1, et ainsi, on peut fonctionner à
fréquence et amplitude constante même si la vitesse du rotor est loin du synchronisme. La puissance à
travers l’ensemble convertisseur/machine-2 est proportionnelle au glissement du Rotor1.
III.3.3.10. Machine en Cascade Avec une Carcasse Unique et un Rotor à Cage D’écureuil
En partant du concept initial, on peut essayer d’optimiser des aspects tels que l’encombrement,
la robustesse, etc. Les deux stators peuvent être inclus dans la même carcasse et le rotor peut adopter
une structure à cage (Figure III.26). Les barres rotoriques sont croisées entre les deux machines. La
modélisation et la commande de cette machine ne présente pas de problèmes particulier : il y a deux
machines indépendantes couplées au niveau des courants du rotor. On peut continuer avec
l’optimisation si l’on intègre les deux bobinages des deux stators dans le même circuit magnétique.
Figure III.26. Machine en cascade avec une carcasse unique et un rotor à cage d’écureuil croisé.
III.3.3.11.Génératrice Asynchrone à Double Alimentation en Cascade avec l’une de Deux Machines
à Double Etoile
Une autre solution a pour but d’améliorer le rendement du dispositif précédent, certains constructeurs
utilisent un système en cascade où l’une des deux machines asynchrones est à double étoile (stator), et,
où les deux étoiles sont décalées de 30° entre elles. (Figure III.27).

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
60
Figure III.27. Système éolien basé sur le couplage en cascade de deux MADA, l’une à une étoile et la
seconde à double étoile
L'inconvénient principal du raccordement indirect au réseau est son coût. Car pour un
raccordement indirect au réseau, l'éolienne a besoin d'un rectificateur et de deux inverseurs, un pour
contrôler le courant du stator, et un autre pour produire le courant de sortie. Actuellement, le prix de
l'électronique de puissance a un coût élevé.
III.4.MODE DE FONCTIONNEMENT DE LA MADA
La machine asynchrone classique fonctionne en moteur en dessous de la vitesse de synchronisme
et ne peut fonctionner en génératrice qu’au-dessus de celle-ci. Par contre, la MADA offre la possibilité
de fonctionner dans les quatre quadrants (Figure III.28). C'est-à-dire que ce n’est plus la vitesse de
rotation qui définit le mode de fonctionnement en moteur ou en générateur.
Figure III.28. Modes de fonctionnement de la MADA.
Fonctionnement moteur hypo-synchrone (g>0)
Le fonctionnement en mode hypo-synchrone du moteur est réalisé lorsqu’il s’agit d’une plage de
réglage de vitesse s’étendant de la vitesse de synchronisme Ω à une vitesse plus faible Ω . La
puissance est fournie par le réseau au stator ; la vitesse de rotation est inférieure au synchronisme, la
puissance de glissement est renvoyée sur le réseau via les convertisseurs connectés au rotor (Fig.
I.14.a).

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
61
Fonctionnement moteur hyper-synchrone (g<0)
Le fonctionnement en mode hyper-synchrone du moteur est réalisé lorsque la vitesse de la
machine peut varier au-delà de la vitesse de synchronisme. Dans ce mode de fonctionnement une
partie de la puissance fournie par le réseau va au rotor via les convertisseurs statiques est convertie en
puissance mécanique (Fig. I.14.b).
Fonctionnement générateur hypo-synchrone (g>0)
Dans ce mode de fonctionnement la puissance est fournie par le dispositif d’entrainement, dans
notre cas la turbine éolienne ; une partie de la puissance transitant par le stator est réabsorbée par le
rotor (Fig. I.14.c).
Fonctionnement générateur hyper-synchrone (g<0)
Dans ce mode de fonctionnement, la totalité de la puissance mécanique fournie à la machine par
la turbine éolienne est transmise au réseau aux pertes prés. Une partie de cette puissance correspondant
à . é est transmise par l’intermédiaire du rotor (Fig. I.14.d).
Le tableau (I.3) résume les différents modes et régimes de fonctionnement de la MADA dans les
quatre quadrants. Le signe (+) attribué à une telle puissance signifie que celle-ci est fournie par la
MADA, alors que le signe moins (-) est attribué dans le cas où la puissance est fournie de l’extérieure à
la MADA.
III.5. CONNEXION DE PARCS EOLIENS AU RESEAU : FERMES «ONSHORE /OFFSHORE »
La puissance des éoliennes tend vers 5 MW, ce qui semble constituer une limite de faisabilité. Ainsi, la
réalisation de fermes de plusieurs centaines de MW nécessite la mise en parallèle de plusieurs unités.
Là encore, les architectures de regroupement (en clusters) des aérogénérateurs au sein d’un parc éolien
et les techniques de connexion au réseau sont diversifiées : regroupement en étoile (star cluster) ou en
chaîne (string cluster). La différence majeure entre ces deux types de regroupement est liée à la
disponibilité de l’énergie des générateurs, moins bonne pour un cluster en chaîne dans lequel le câble
de raccordement est commun à l’ensemble du cluster. En contre -partie, chaque cluster en étoile
nécessite une plate-forme.
Les architectures de raccordement à vitesse fixe (figure III.25 : AC1, AC3) ou variable (AC2, AC4)
sont assez proches. Le dimensionnement des câbles et des transformateurs diffère selon l’architecture
et la puissance des générateurs. Par exemple, pour une architecture en étoile, on peut éviter l’utilisation
de transformateurs si les tensions des générateurs sont suffisamment élevées (AC3, AC4).
Tableau III.1. Modes opérationnels de la MADA
Modes
Moteur > 0 Générateur < 0
Rég
imes
= −( + ) Hypo-synchrone
< 0 > 0
> 0 < 0
= −( + ) Hyper-synchrone
< 0 < 0
> 0 > 0

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
62
Sur les liaisons en alternatif, en particulier si la puissance de la ferme devient non négligeable par
rapport à la puissance du réseau, on intercale souvent des équipements type UPFC (Unified Power
Flow Controller) chargés de limiter les variations de puissance et de stabiliser l’ensemble en dépit des
variations de vent (AC4).
Les liaisons réseaux s’effectuent classiquement en alternatif pour des questions de coût, en
particulier dans les parcs terrestres (onshore) ou les parcs offshore proches du rivage. Pour les parcs
éloignés du rivage, les liaisons continues à haute tension HVDC (High Voltage Direct Current)
deviennent intéressantes (DC 1, 2, 3,4), cela d’autant plus que la puissance de la ferme augmente vis-à-
vis de la puissance de court-circuit du réseau. En effet, les liaisons sous-marines à courant alternatif
sont limitées à quelques dizaines de kilomètres en raison des échauffements dus aux courants
capacitifs. Pour les systèmes à vitesse variable, le nombre de convertisseurs AC-DC et DC-AC peut
varier selon que l’on connecte un convertisseur par générateur (AC2, AC4, DC1) ou un convertisseur
par cluster (DC2, DC3), voire un seul convertisseur pour le parc complet (DC4). Dans le premier cas,
la vitesse de chaque turbine peut être individuellement asservie en fonction du vent. Dans le second et
troisième cas, on agit indirectement sur l’ensemble du cluster ou de la ferme, ce qui nécessite que les
conditions de vent soient homogènes, ce qui est fréquent en mer.
Figure III.29. Exemples d’architectures de connexion des parcs éoliens au réseau

Chapitre III : Système aérogénérateurs
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
63
III.6.SYNTHESE
Une synthèse de différente solution électrotechnique de conversion de l’´énergie éolienne en
énergie électrique est présentée dans ce chapitre. Nous avons présenté les deux technologies
d’éoliennes à savoir les éoliennes à vitesse fixe et celles à vitesse variable. Les éoliennes à vitesse fixe
permettent peu de réglage et fonctionnent comme des générateurs passifs. Les éoliennes à vitesse
variable offrent plus de possibilités de réglage, mais ont un coût plus élevé. Plusieurs types de chaînes
de conversion d’´énergie sont abordés. La solution qui utilise la machine asynchrone à double
alimentation, dont le stator est relié directement au réseau de puissance et dont le rotor est connecté à
travers un convertisseur de puissance est la plus utilisée.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
64
Chapitre IV :
Modélisation de l’aérogénérateur
IV.1.INTRODUCTION
Le système de conversion de l’énergie éolienne (Figure IV.1) est un système complexe à cause de la
multiplicité des domaines existants, à savoir, le domaine aérodynamique, mécanique, électrique et les
facteurs déterminant la puissance mécanique, comme la vitesse du vent, la dimension et la forme de la
turbine. Un modèle dynamique rassemblant tous ces paramètres est nécessaire pour comprendre le
comportement de la turbine, et le recours à la modélisation est devenu une nécessité pour contrôler ces
performances et satisfaire les caractéristiques opérationnelles voulues. L’énergie en provenance du
vent traverse la turbine éolienne qui est un élément d’interface entre le domaine de la mécanique des
fluides et de la mécanique traditionnelle.
La turbine est accouplée à la génératrice et permet la transformation d’énergie mécanique en énergie
électrique. Les composants électriques tels que les convertisseurs statiques et l’élément de filtrage
disposés en aval de la génératrice, ont un rôle d’adaptation active des caractéristiques de l’énergie
électrique, ont un rôle d’adaptation active des caractéristiques de l’énergie électrique entre la
génératrice et la charge finale.
La partie mécanique de la turbine qui sera étudiée comprend trois pales orientables et de longueur R.
elles sont fixées sur un arbre d’entraînement tournant à une vitesse Ω qui est relié à un multiplicateur
de gain G. ce multiplicateur entraîne une génératrice électrique.
Figure IV.1. Exemple d’une chaîne de conversion d’énergie éolienne.
Remarque : dans ce chapitre, on vas utiliser le logéciel Matlab/Simulink pour simuler le
comportement de la chaine de conversion éolienne basé sur la génératrice synchrone à aimant
permanent.
IV.2.MODELE DE LA TURBINE
Considérons une turbine éolienne munie de pales de longueur R entrainant une génératrice à travers un
multiplicateur de vitesse de G (Figure IV.2).

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
65
Figure IV.2. Turbine éolienne.
IV.2.1. Modèle des pales
La puissance cinétique du vent est donnée par.
P_v=(ρ.S.V^3)/2 (IV.1)
La turbine permet de convertir l’énergie aérodynamique du vent en énergie mécanique. Son couple
aérodynamique C_aéro est donné par l’expression suivante :
C_aéro=1/(2Ω_t ) C_p (λ,β)ρSV^3 (IV.2)
La puissance aérodynamique apparaissant au niveau du rotor de la turbine s’écrit comme suit :
P_aéro=Cp (λ,β) P_v=C_p (λ,β) (ρSV^3)/2 (IV.3)
Ω_t : est la vitesse de la turbine
ρ : est la densité de l’air, ρ =1.22kg/m3.
S : est l’aire balayée par la turbine, S=π.R^2 .
V : est la vitesse du vent (m/s).
C_p : est le coefficient qui caractérise le rendement aérodynamique de la turbine (Figure. IV.3). Il
dépend des caractéristiques de la turbine (les dimensions de la pale, le ratio de la vitesse λ et l’angle
d’orientation de la pale β).
Le ratio de vitesse est défini comme le rapport entre la vitesse de la turbine et la vitesse du vent, son
expression est donnée comme suit :
V
R t (IV.4)
Pour une éolienne de 7.5Kw, l’expression du coefficient de puissance est donnée par:
65
432
1 exp, CC
CCC
CfCii
p
(IV.5)
Avec :

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
66
1
035.0
08.0
113
i
; (IV.6)
;0068.06
,215
,54
,4.03
,1162
,5176.01
CCCCCC
Figure IV.3. Coefficient aérodynamique en fonction du ratio de vitesse de la turbine
Figure IV.4. Schema bloc du modèle des pales
IV.2.2.Courbe caractéristique du coefficient du couple
Les performances de la turbine éolienne à vitesses variables et à réglage par orientation des palles, sont
déterminées par les caractéristiques des courbes reliant le coefficient de puissance, la vitesse spécifique
et l’angle de calage. Ces courbes peuvent être obtenues à partir de relevés réels réalisés sur différentes
catégories d’éoliennes, ou des formules non linéaires. Des approximations numériques ont été
développées dans la littérature pour calculer le coefficient Cp, et différentes expressions ont été
roposées. Nous présentons ci-dessous un tableau les expressions les plus utilisées dans les articles
scientifiques et les ouvrages.
IV.3. MODELE DU MULTIPLICATEUR DE VITESSE
Le multiplicateur de vitesse, qui est disposé entre la turbine éolienne et la génératrice, a pour but
d’adapter la vitesse de la turbine Ω, assez lente, à celle que nécessite la génératrice Ω . il est
modélisé par les deux équations suivantes :
Ω =
Ω (IV.7)
C =
Cé (IV.8)

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
67
Tableau IV.1 Différentes expressions du coefficient Cp.
Types de Cp Formes
Exponentielle
Sinusuidale
Polynomiale
IV.4. MODELE DE L’ARBRE MECANIQUE
L’arbre est composé d’une masse correspondant à l’inertie du rotor de la turbine supportant les pales,
le moyeu, et une petite inertie représentant le rotor de la génératrice. Dans le modèle mécanique
proposé, l’inertie totale est celle de la génératrice et l’inertie de la turbine ramenée au rotor de
la génératrice.
Figure IV.5. Modèle mécanique simplifié de la turbine
(IV.9)
Le modele complet de la turbine est ilustré par la figure V.6

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
68
Figure IV.6. Modèle complet de la turbine
IV.5. MODELE DU VENT
Le vent est la raison d’être des aérogénérateurs. L’énergie cinétique contenue dans le vent est
transformée en partie en énergie mécanique par la turbine, puis en énergie électrique par le générateur.
C’est donc une variable importante à modéliser car la précision des simulations dépendra de la qualité
de son modèle. Le choix géographique d'un site éolien est primordial dans un projet de production
d'énergie. Les caractéristiques du vent vont déterminer la quantité de l'énergie qui pourra être
effectivement extraite du gisement éolien. De nombreux travaux sur la modélisation du vent ont été
réalisés. L’un des principes retenu consiste à générer l’allure temporelle du vent à partir d’un bruit
blanc sur lequel on applique une fonction de transfert à déterminer.
Les paramètres de cette fonction de transfert dépendent de grandeurs caractéristiques du site et de la
nature du vent. Donc la vitesse du vent va être décomposée en deux composantes:
v(t)= vo + vT(t) (IV.10) Une composante turbulente du vent vT(t) est un processus aléatoire stationnaire (ne varie pas avec
la vitesse moyenne du vent).
Une composante lente vmoy ; c'est la moyenne de la vitesse du vent variant régulièrement sur de
plus longues périodes dans un site donné.
Alors la vitesse du vent sera modélisée sous forme déterministe par une somme de plusieurs
harmoniques sous la forme: V(t) = 7,5+0.7 [3sin0.09t+0.7sin0.42t+18sin0.01t+sin0.038t].
La Figure (Figure IV.7) Représente le vent simulé avec une vitesse moyenne de 7,5 m/s.
Figure IV.7. Simulation du profil de la vitesse du vent.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
69
IV.6. LA VITESSE SPECIFIQUE OU NORMALISEE
On définit la vitesse spécifique ou normalisée λ comme étant le rapport de la vitesse linéaire en bout de
pales de la turbine ῼt et Rt sur la vitesse instantanée de vent V (Figure IV.8) et donnée par
l’expression suivante.
(IV.11)
Figure IV.8. Vitesse de vent V et vitesse tangentielle de l’aubage ῼt. Rt
IV.7.STRATEGIES DE COMMANDE DE LA TURBINE EOLIENNE
Les stratégies de commande des systèmes éoliens de moyennes et grands puissances vitesses
variables et à régulation de puissance « Pitch » utilisées notamment pour les aérogénérateurs Vestas et
Gamesa de dernière génération sont basées sur les données aérodynamiques de la turbine. La
caractéristique Puissance-Vitesse d’une éolienne (figure IV.9) peut se décomposer en quatre zones.
Figure IV.9. Caractéristique Puissance-Vitesse typique d’une éolienne à grande puissance
La zone 1, zone de démarrage de la machine ou la vitesse du vent est inférieure à la
vitesse de démarrage VD de l’éolienne. Dans ce cas, la turbine ne fonctionne pas et ne produit pas
d’énergie (=0) ;
La zone 2, dans laquelle la puissance fournie sur l’arbre dépend de la vitesse du vent V ;
La zone 3, ou généralement la vitesse de rotation est maintenue constante par un
dispositif de régulation et ou la puissance fournie reste sensiblement égale à ;

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
70
La zone 4, dans laquelle le système de sûreté du fonctionnement arrête la rotation et le
transfert de l’énergie, lorsque la vitesse du vent dépasse la vitesse maximale admissible par
l’éolienne VM. Il faut donc limiter la puissance captée par l’aérogénérateur lorsque le vent devient
trop important.
Par sécurité, si la vitesse du vent devient trop importante et risque d’endommager l’éolienne, l’angle
de calage des pales se fixe à 90°. C’est la mise en drapeau qui met fin au fonctionnement de l’éolienne
jusqu’à ce que la vitesse du vent devienne moins importante, En pratique, le passage de la zone 2 à la
zone 4 est un peu particulier. En effet, la vitesse de rotation est contrôlée par le couple
électromagnétique Cem en zone 2 et, en zone 4, c’est la puissance qui doit être contrôlée par le
dispositif d’orientation des pales.
Le système d’orientation des pales a une dynamique bien plus lente que la dynamique électrique de la
machine. Ainsi la lenteur de la régulation de l’angle de calage peut entrainer un dépassement de la
vitesse de rotation limite lors d’une rafale se produisant pendant un fonctionnement entre les zones 2 et
4. Il est, dans ce cas, intéressant de concevoir une procédure permettant d’anticiper l’action du
dispositif d’orientation en réglant le couple électromagnétique de manière à contrôler la vitesse de
rotation, dans cette zone 3 intermédiaire. La caractéristique équivalente mesurée sur l’éolienne de
Schelle de 1.5 MW est représentée sur la figure (Fig. IV.10).
Figure IV.10. Caractéristique Puissance-Vitesse d’une éolienne de 1.5 MW
IV.8.MODELE DE LA GSAP
Le modèle mathématique de la machine synchrone à aimants permanents obéit à certaines hypothèses
essentielles simplificatrices :
1. L’absence de saturation dans le circuit magnétique.
2. La distribution sinusoïdale de le FMM crée par les enroulements du stator.
3. L’hystérésis est négligée avec les courants de Foucault et l’effet de peau.
4. L’effet d’encochage est négligeable.
5. La résistance des enroulements ne varie pas avec la température.
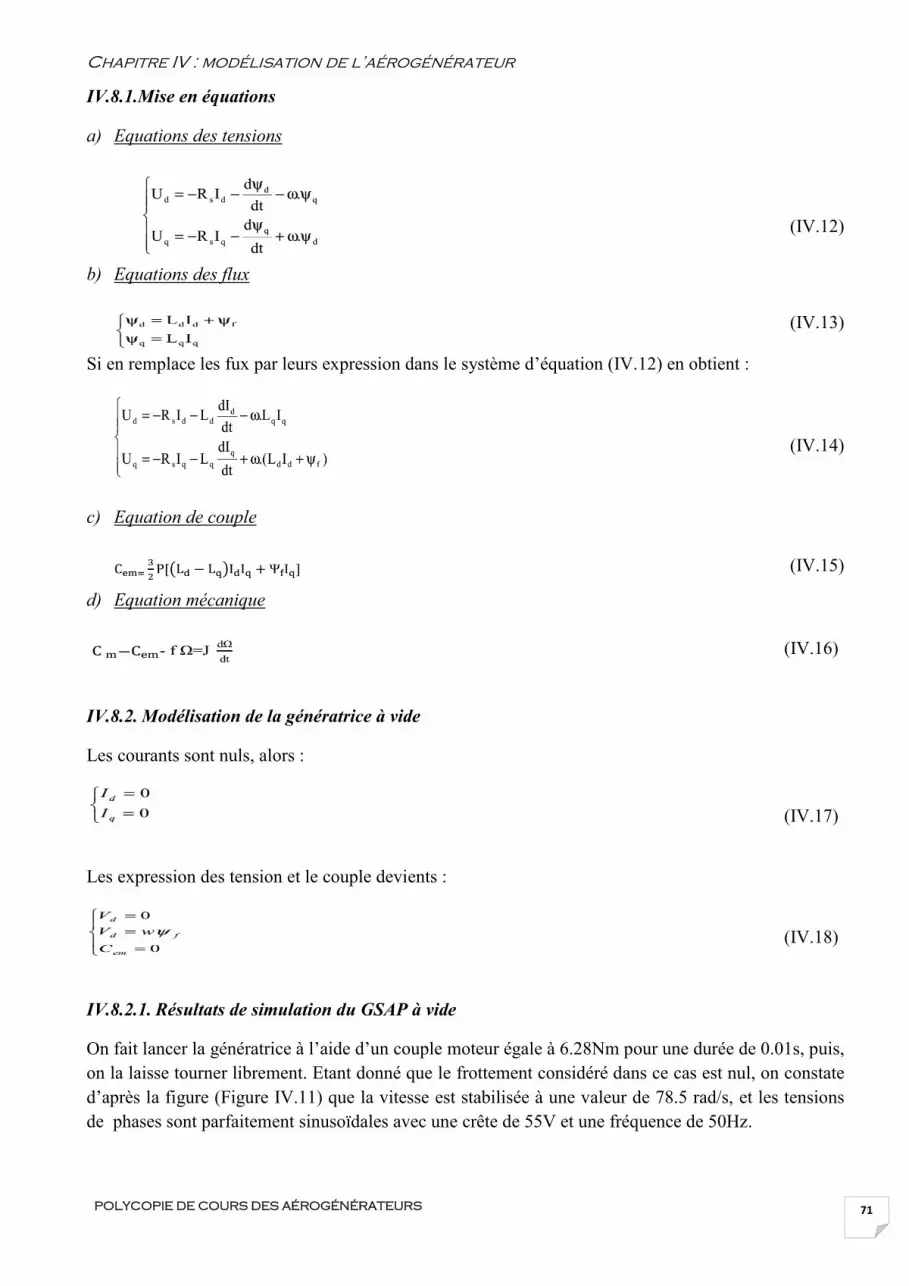
Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
71
IV.8.1.Mise en équations
a) Equations des tensions
(IV.12)
b) Equations des flux
(IV.13)
Si en remplace les fux par leurs expression dans le système d’équation (IV.12) en obtient :
(IV.14)
c) Equation de couple
(IV.15)
d) Equation mécanique
(IV.16)
IV.8.2. Modélisation de la génératrice à vide
Les courants sont nuls, alors :
(IV.17)
Les expression des tension et le couple devients :
(IV.18)
IV.8.2.1. Résultats de simulation du GSAP à vide
On fait lancer la génératrice à l’aide d’un couple moteur égale à 6.28Nm pour une durée de 0.01s, puis,
on la laisse tourner librement. Etant donné que le frottement considéré dans ce cas est nul, on constate
d’après la figure (Figure IV.11) que la vitesse est stabilisée à une valeur de 78.5 rad/s, et les tensions
de phases sont parfaitement sinusoïdales avec une crête de 55V et une fréquence de 50Hz.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
72
Figure IV.11. Résultats de simulation de la génératrice à aimants permanents à vide
IV.8.3. Modélisation de la génératrice en charge
La génératrice alimente une charge électrique (Rch-Lch). Pour avoir les tensions et les courants
résultats de l’application de cette charge sur la génératrice, on applique d’une part, les équations
données par (IV.14), et d’autre part, l’application des tensions Ud et Uq sur la charge donne :
(IV.18)
En introduisant la transformée de LAPLACE dans les équations ci-dessus, elles deviennent :
(IV.19)
IV.8.4.Modélisation de l’onduleur de tension
Figure IV.12. onduleur à deux niveaux
L'onduleur est modélisé en associant à chaque bras une fonction logique de connexion Fi.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
73
IV.8.4.1.Commande de l'onduleur par les techniques MLI
Les progrès technologique récents dans le domaine des dispositifs à semi- conducteurs, comme les
transistors de puissance et GTO ont ouvert un large domaine d'application des techniques de
modulation de largeur d'impulsion (MLI) dans le contrôle de la tension de sortie des convertisseurs
statique. L'emploi de cette technique est particulièrement intéressant dans le cas d'onduleur triphasé
associés à des machines à courant alternatif, rendant possible le contrôle en amplitude et en fréquence
des tension de sortie de l'onduleur. Pour cette étude nous intéressant a la technique de modulation de
large impulsion stratégie de commande triangulo-sinusuidale.
Principe de la stratégie de commande MLI triangulo-sinusuidale:
Dans cette stratégie les trois tensions de phase sont générées par la comparaison des trois tensions de
référence, qui correspondent aux tensions de sortie recherchée de fréquence f à un signale triangulaire
commun d'amplitude fixe et de fréquence nettement supérieur à f.
p ref1ipref1 V V si 0g ; V V si 1 iG
p ref2ipref2 V V si 0f ; V V si 1 iF
La tension de référence à pour équation :
3)1(2)2( sinV ref
itfr
r: taux de modulation qui est le rapport de l'amplitude de la modulante par celle de la porteuse:
mp
m
V
Vr
f
fm
p Indice de modulation :
La figure IV.13 représente le principe de la stratégie de commande MLI triangulo-sinusuidale pour
(Onduleur à deux Niveaux). Pour r=0.8 et différentes valeurs de m, on pressente :
Tensions de sortie Va.
Tensions de référence vref et la porteuse Vp .
Tension composée Uab.
Signal de commande.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
74
Figure IV.13.Principe de la technique MLI triangulo- sinusoïdale
Pour (r=0.8 et m=21) Les tensions simple obtenus à la sortie de l’onduleur s’expriment comme suit :
(IV.20)
IV.8.5. Alimentation utilisant un redresseur et onduleur contrôlés par MLI
Pour cette structure, le redresseur à diode est remplacé par un convertisseur à modulation de largeur
d’impulsion à fréquence variable. La génératrice est alors parfaitement contrôlée, et il est possible
d’extraire un maximum de puissance de la turbine éolienne par le biais d’un contrôle du courant dans
la génératrice, pilotant ainsi le couple électromagnétique et/ou la vitesse de rotation. Un deuxième
convertisseur à MLI connecté au réseau est nécessaire pour générer des grandeurs à fréquence fixe sur
le réseau et contrôler les transits de puissance.
Le redresseur devant fournir sous la tension de batterie un courant variable en fonction de la charge, et
comme la tension de la batterie est susceptible de varier, celui-ci doit être contrôlable en courant. De
plus, le taux d’ondulation du courant fourni par le redresseur doit rester acceptable pour minimiser les
pertes dans la batterie. La batterie fonctionne dans ces conditions de telle sorte que son courant moyen
en régime établi est nul. Le premier critère de choix de la structure de redresseur se résume au fait que
l’on puisse agir sur la valeur moyenne du courant fourni et sur son taux d’ondulation. A ce critère, on
ajoute évidements les critères fondamentaux liés la compacité et la fiabilité,
A ce stade, nous envisageons quatre types de redresseurs qui sont les suivants :
1. Pont redresseur triphasé à thyristors.
2. Pont redresseur triphasé à diode muni d’un hacheur dévolteur.
3. Pont redresseur commandé à transistors IGBT à structure courant.
4. Pont redresseur commandé à transistors IGBT à structure tension.
IV.8.5.1.Modélisation du redresseur triphasé double alternance à diodes
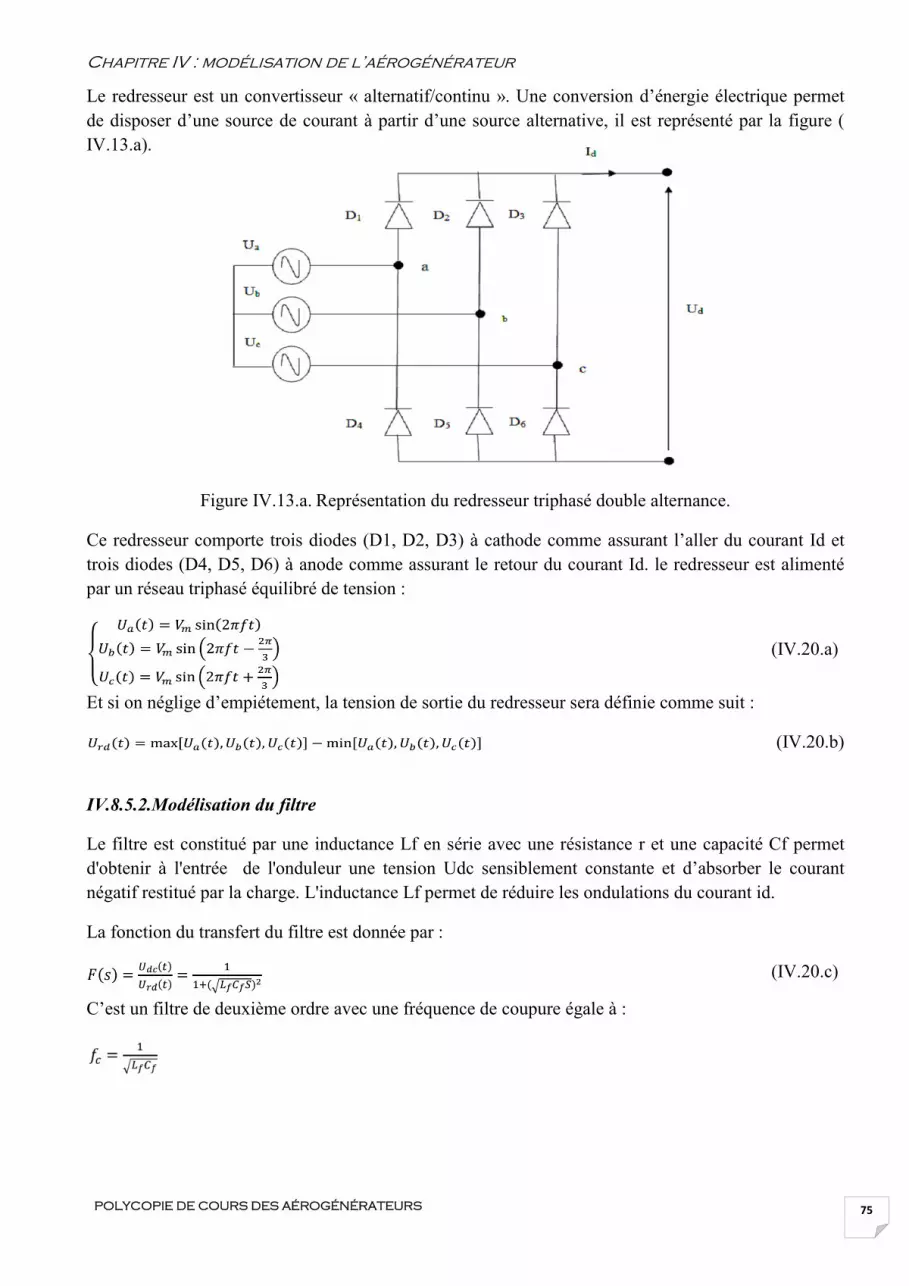
Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
75
Le redresseur est un convertisseur « alternatif/continu ». Une conversion d’énergie électrique permet
de disposer d’une source de courant à partir d’une source alternative, il est représenté par la figure (
IV.13.a).
Figure IV.13.a. Représentation du redresseur triphasé double alternance.
Ce redresseur comporte trois diodes (D1, D2, D3) à cathode comme assurant l’aller du courant Id et
trois diodes (D4, D5, D6) à anode comme assurant le retour du courant Id. le redresseur est alimenté
par un réseau triphasé équilibré de tension :
(IV.20.a)
Et si on néglige d’empiétement, la tension de sortie du redresseur sera définie comme suit :
(IV.20.b)
IV.8.5.2.Modélisation du filtre
Le filtre est constitué par une inductance Lf en série avec une résistance r et une capacité Cf permet
d'obtenir à l'entrée de l'onduleur une tension Udc sensiblement constante et d’absorber le courant
négatif restitué par la charge. L'inductance Lf permet de réduire les ondulations du courant id.
La fonction du transfert du filtre est donnée par :
(IV.20.c)
C’est un filtre de deuxième ordre avec une fréquence de coupure égale à :
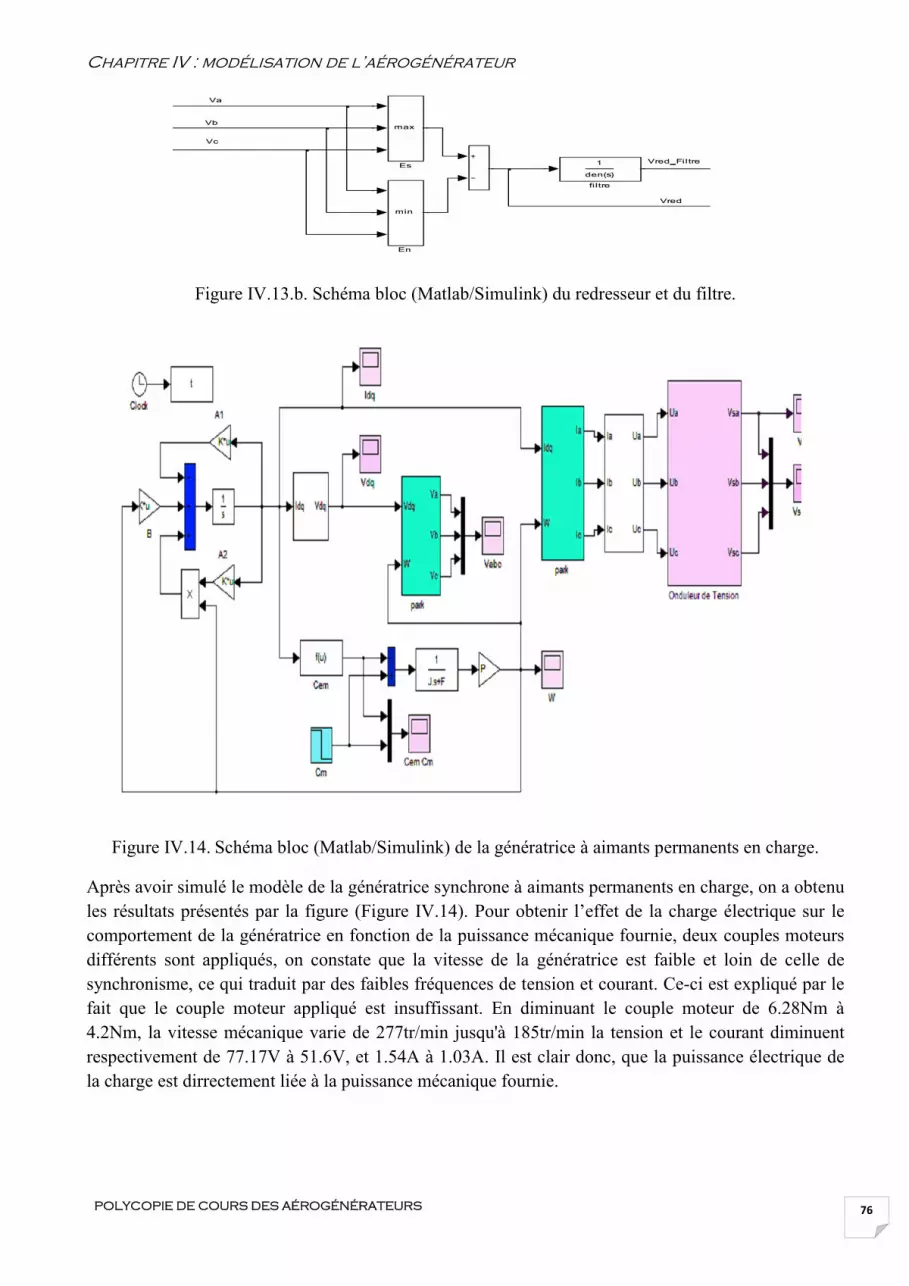
Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
76
Figure IV.13.b. Schéma bloc (Matlab/Simulink) du redresseur et du filtre.
Figure IV.14. Schéma bloc (Matlab/Simulink) de la génératrice à aimants permanents en charge.
Après avoir simulé le modèle de la génératrice synchrone à aimants permanents en charge, on a obtenu
les résultats présentés par la figure (Figure IV.14). Pour obtenir l’effet de la charge électrique sur le
comportement de la génératrice en fonction de la puissance mécanique fournie, deux couples moteurs
différents sont appliqués, on constate que la vitesse de la génératrice est faible et loin de celle de
synchronisme, ce qui traduit par des faibles fréquences de tension et courant. Ce-ci est expliqué par le
fait que le couple moteur appliqué est insuffissant. En diminuant le couple moteur de 6.28Nm à
4.2Nm, la vitesse mécanique varie de 277tr/min jusqu'à 185tr/min la tension et le courant diminuent
respectivement de 77.17V à 51.6V, et 1.54A à 1.03A. Il est clair donc, que la puissance électrique de
la charge est dirrectement liée à la puissance mécanique fournie.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
77
Figure IV.15. Résultats de simulations de la génératrice synchrone à aimants permanents en
charge.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
78
IV.9.SYSTEME DE CONTROLE DE L’AEROTURBINE
Le contrôle de l’aéroturbine est assuré par deux boucles de régulation, fortement liées :
1. Boucle de régulation de vitesse.
2. Boucle de régulation de puissance
La première boucle est la boucle principale dans la stratégie d’optimisation de la puissance ou la
vitesse de rotation est contrôles par le couple électromagnétique. Dans la stratégie de limitation de
puissance, les deux boucles de régulation interviennent. Quand la vitesse de vent est inférieure à la
vitesse nominale, l’angle de calage est maintenu constant à une valeur optimale βopt, tandis que la
vitesse de rotation est ajustée par la boucle de régulation de vitesse pour le maximum de la puissance
du vent. Lors d’une rafale de vent, la vitesse de rotation va augmenter et peut dépasser la vitesse
nominale à cause de la lenteur du système d’orientation des pales qui a une dynamique plus lente que
celle de la machine. Dans ce cas, la boucle de vitesse réagit en augmentant la puissance de référence de
la génératrice, et anticipe l’action du dispositif d’orientation des pales en réglant le couple
électromagnétique de manière à contrôler la vitesse de rotation dans la zone 3.
IV.9.1.Méthodes de recherche du point maximum de puissance
La caractéristique de la puissance optimale d’une éolienne est fortement non linéaire et en forme de «
cloche ». Pour chaque vitesse de vent, le système doit trouver la puissance maximale ce qui équivaut à
la recherche de la vitesse de rotation optimale. Le schéma de la figure (Fig. IV.9) illustre les courbes
caractéristiques de l’éolienne dans le plan puissance, vitesse de rotation de la turbine. Chaque courbe
en ligne correspond à une vitesse de vent V donnée. L’ensemble des sommets de ces caractéristiques,
qui sont les points optimaux recherchés, définit une courbe dite de puissance optimale définit par
l’équation:
(IV.21)
Un fonctionnement idéal du système éolien nécessite un suivi parfait de cette courbe. Pour s’approcher
de ce but, une commande spécifique connue sous la terminologie :
Maximum Power Point Tracking (MPPT) correspond à la zone 2 doit être utilisée. La stratégie de cette
commande consiste à contrôler le couple électromagnétique afin de régler la vitesse mécanique de
manière à maximiser la puissance électrique générée. On distingue deux approches possibles :
1. La première approche, la moins classique, considère que la caractéristique Cp=f(λ) n’est pas
connue.
2. La deuxième approche considère que la caractéristique Cp=f(λ) est connue. Il suffit de suivre la
courbe optimale de puissance pour que l’éolienne soit dans les conditions optimales.
IV.9.1.1.MPPT avec la connaissance de la courbe caractéristique de la turbine éolienne
Cette façon de procéder exige du constructeur de l’éolienne des essais de caractéristique (soufflerie) ou
des simulations du profil de pales. Une telle caractéristique permet de simplifier considérablement
l’algorithme de la recherche de puissance maximale et d’utiliser des convertisseurs plus classiques et
moins coûteux. Deux familles de structures de commande sont présentées dans cette approche:
A. Maximisation de la puissance avec asservissement de vitesse

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
79
La nature fluctuante du vent engendre des perturbations dans le système de conversion éolien, et crée
des variations continues de puissance. De cet effet, il est supposé que le couple électromagnétique
développé par la machine est égal à sa valeur de référence quel que soit la puissance générée.
B. Maximisation de la puissance sans asservissement de vitesse
Etant donné que la technique précédente de maximisation de puissance repose sur la connaissance
précise de la vitesse du vent, ce qui rend le réglage de la vitesse de rotation de la turbine relativement
difficile, et dégrade les puissances captées avec des mesures erronées de cette vitesse de vent. Le
recours au contrôle des éoliennes sans asservissement de vitesse est devenu une nécessité pour la
plupart des constructeurs. Cette méthode est basée sur l’hypothèse que la vitesse du vent, et par
conséquent la vitesse de rotation de la turbine, varient très peut en régime permanent. Ceci, nous
conduit à déduire que:
Le couple mécanique exercé sur l’arbre est considéré nul Cmec=0.
Le couple résistant dû aux frottements peut être négligé Cf≈0.
Pour que la puissance extraite soit maximale, on associe à la grandeur λ sa valeur λopt optimale
correspond au maximum du coefficient de puissance Cpmax. La valeur du couple électromagnétique
de référence est alors réglée à la valeur maximale de la manière suivante :
(IV.22)
En mettant
(IV.23)
L’algorithme MPPT contrôlé à l’aide de la vitesse de rotation mesurée dans l’étape K,détermine le
couple de référence dans l’étape K+1 de la façon montrée sur la figure (IV.16).
Figure IV.16. Couple de référence en fonction de la vitesse de rotation.
Le fonctionnement de la MPPT peut être expliqué sur la figure (IV.17) Supposons pour cela que la
vitesse du vent est de 10m/s et qu’initialement, le système est au point (ῼtur1, Ptu1). La MPPT calcule
alors la vitesse ῼtu2 à imposer à la génératrice correspondant à Ptu1. Le système se place alors au
point (ῼtur2, Ptu1). Une fois la vitesse de référence envoyée, le système va évoluer en Ptu2 et se
retrouver au point (ῼtur2, Ptu2). L’MPPT calcule à nouveau la vitesse ῼtu3 correspondant à Ptu2 et le
système se place alors au point (ῼtur3, Ptu2). Le système évolue donc vers le point de puissance
optimale quelle que soit la vitesse de vent.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
80
Figure IV.17. Convergence vers le point optimal
La valeur optimale du ratio de vitesse λ_opt (à β constant et égal à 2°) permet d’obtenir la valeur
maximale du Cp_opt.
Figure IV.18. Coefficient de puissance en fonction de la vitesse spécifique pour un angle de calage
optimal (2°)
De la figure (IV.18), on déduit le coefficient de puissance optimale ainsi que la vitesse spécifique
optimale. = 9.81 _ = 0.35.
Le schéma bloc du modèle de la turbine est représenté sur la figure (IV.19) comme suit:

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
81
Figure IV.19. Schéma bloc (Matlab/Simulink) de la maximisation de puissance sans asservissement de
vitesse.
Le schéma global (Matlab/Simulink) de l’aérogénérateur basé sur la génératrice synchrone à aimant
permanent est illustré par la figure (IV.20).
Figure IV.20. Schéma bloc (Matlab/Simulink) de la chaine de conversion éolienne.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
82
Les résultats de simulations sont obtenus pour une vitesse de vent moyenne de 10 m/s, et varier entre
10,5 et 13,5 m/s.
a) Profil de vent appliqué à la turbine
Figure IV.21. Profil de vent utilisé pour l’entrainement d’aérogénérateur
b) Puissance active et réactive
Les puissances (active et réactive) sont adaptées à la variation de la vitesse du vent et on constate que
la courbe de la puissance mécanique de la turbine est bien suivie par celle de la puissance électrique
produit par la GSAP.
Figure IV.22. Puissances active et réactive
c) Les tensions
Les tensions statoriques de la GSAP ont pris leurs formes sinusoïdales et sont aussi adaptées à la
variation de la vitesse du vent.
Figure IV.23. Allure des Tensions statoriques Vabc de la GSAP.
d) Tension redressé et filtré

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
83
Figure IV.24. Allure de Tension redressé et filtré
e) Tensions de sortie de l’onduleur
Il est clair que l’amplitude de la tension devient plus importante avec l’augmentation de la vitesse du
vent
Figure IV.25. Allure des Tensions de sortie de l’onduleur
f) Courants statoriques
Les courants statoriques, ont pris leurs formes sinusoïdales et sont aussi adaptés à la variation de la
vitesse du rotor. La fréquence rotorique dépend de la variation de rotation de l’éolienne.

Chapitre IV : modélisation de l’aérogénérateur
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
84
Figure IV.26. Allure courants statoriques
A partir des figures précédents, on observe l’influence de la vitesse du vent, et par la suite son énergie
cinétique sur les amplitudes des courants et des tensions. Avec l’augmentation de la vitesse du vent, les
valeurs du courant et de la tension deviennent plus importantes, que ce soit du côté génératrice ou bien
du côté charge.

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
85
Travaux Dirigés
Exercice 1 : Une bouilloire électrique possède une indication sur sa puissance consommée. Celle-ci est de P = 1 200 W. Cet appareil est utilisé pendant une durée Δt = 5 minutes 1. Rappeler la relation entre l’énergie consommée E, la puissance P et la durée de fonctionnement Δt. Indiquer les unités appropriées pour avoir une énergie E en Joule (J) 2. Exprimer Δt dans l’unité appropriée et déterminer l’énergie électrique consommée E en Joules (J) lors de l’utilisation de cet appareil. 3. On veut exprimer cette énergie E en kilowattheure (kWh), quelles conversions d’unités doit-on effectuer. Déterminer alors l’énergie consommée E en kWh par l’utilisation de cet appareil. 4. Le prix du kWh est de 0,10 €. Quel sera le coût engendré par cette utilisation ? 5. Cet appareil permet la conversion entre quelles formes d’énergie ?
Exercice 2 1. Quelle est la forme d’énergie captée par ces éoliennes ? S’agit-il d’une ressource renouvelable ? 2. Déterminer la puissance totale P restituée par ce parc en kW. 3. Déterminer l’énergie totale E restituée par ce parc et l‘exprimer en kWh. 4. Ce parc fournit 2% de l’énergie totale ET consommée Quelle est l’énergie totale ET consommée ? L’exprimer en kWh.
Exercice 3 Nous souhaitons dimensionner les pales d'une éolienne à vitesse fixe pour obtenir une puissance mécanique de 750 kW pour une vitesse de vent de 13,8 m/s. On considère un coefficient de puissance Cp égal à 0,2. Quel sera la longueur de notre pale ou le rayon de la surface balayée par la turbine ?
Exercice 4 Soit l'installation suivante :

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
86
La turbine de l'éolienne entraîne une génératrice asynchrone (MAS) à cage qui débite sur un réseau de distribution. Les données sont :
Densité de l'air : Rayon des pales : R = 45 m Coefficient du multiplicateur : k = 70 Nombre de paires de pôles de la MAS : p = 2 Fréquence du réseau : f = 50 Hz Calculer pour un glissement g de -1 % :
- La vitesse du rotor de la génératrice asynchrone en rad/s, et N en tr/min.
- La vitesse de l'arbre primaire de l'éolienne en rad/s et en tr/min. Exercice 5
L'énergie électrique que va fournir l'éolienne dépend de la puissance du vent qu'elle va récupérer. L'exercice va nous permettre de déterminer quelle quantité de vent la turbine va récupérer.
On modélise le passage du vent, dans le rotor de l'hélice par un tube de courant, avec , , les vitesses du vent avant les pales, aux pales, et après les pales. L'air est déterminé par sa masse
volumique en , la surface balayée par les pales est S en m².
1- Quelle est la puissance P absorbée par le rotor ?
2- Quelle est la variation d'énergie cinétique par seconde de la masse d'air ?
3- Que peut-on en déduire sur la relation entre V, , ?
4- Calculer alors la puissance maximale
5- En déduire le coefficient de puissance maximal pour une éolienne, que peut-on conclure?
Exercice 6 On donne quelques paramètres d'une éolienne de 300 kW:
Diamètre des pales : 28 m
Surface balayée par le rotor : 615 m²
Vitesse nominale du vent : 14 m/s
Vitesse nominale de rotation du rotor : 43 tr/min

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
87
Rapport du multiplicateur : 35
Vitesse nominale de la MAS : 1515 tr/min
Par ailleurs, la densité de l'air est de 1,225 .
1) - Quel pourcentage de l'énergie du vent récupère-t-on au point de fonctionnement nominal
2) - De quel type d'éolienne s'agit-il : éolienne lente ou éolienne rapide ?
3)- Quelle est la vitesse nominale N du rotor de la génératrice ?
Exercice 7 Montrer que le couple mécanique produit par la turbine peut s'exprimer par
Où est le coefficient de couple, R le rayon de la pale, v la vitesse du vent.
Exercice 8 L’hélice de l’éolienne effectue 24 tours par minute. 1. Calculer la fréquence f du mouvement en tour par seconde ainsi que sa période T sachant que
f=1/T. 2. Le passage d’une pale devant le poteau supportant l’éolienne génère un bruit. Sachant que
l’éolienne a trois pales, quelle est la fréquence en tour par seconde du bruit généré par le passage des pales devant le poteau ?
Exercice 9 Sur le lieu d’implantation de l’éolienne, une étude sur la vitesse du vent durant un mois a donné les résultats suivants :
Vitesse (m/s) [0-5] [5-10] [10-15] [15-20] [20-25] [25-30] Nombres de jours 2 10 6 5 5 2
1. En considérant que l’effectif de chaque classe est affecté au centre de la classe, déterminer la
vitesse moyenne vm du vent au cours du mois considéré et l’écart-type σ de la série. Les résultats seront arrondis au dixième. 2. D'après les données du constructeur, l’utilisation d’une éolienne est rentable si vm- σ et vm+ σ sont
compris entre 5 et 25 m/s. Est-ce le cas de l’éolienne étudiée dans cet exercice ? Justifier la réponse.
Exercice 10 (COURBE DE PUISSANCE) Le graphique ci-dessous représente la variation de la puissance d'une éolienne en fonction de la vitesse du vent. À partir de quelle vitesse du vent l'éolienne démarre-t-elle ? 2. Quelle est la puissance électrique atteinte par l'éolienne quand le vent souffle à 10 m/s ? 3. Quelle est la puissance maximale que peut fournir l'éolienne ? À partir de quelle vitesse du vent cette puissance maximale est-elle atteinte ? 4. Que signifie la partie horizontale de la courbe ?

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
88
5. La puissance électrique fournie est-elle proportionnelle à la vitesse du vent ? Justifier. 6. Comment expliquer que le graphique ne va pas au-delà d'une vitesse du vent de 25 m/s ? Que fait l'éolienne lorsque le vent atteint une telle vitesse ? 7. Quelle est environ la puissance électrique fournie quand le vent souffle à 25 km/h ?
Exercice 11 (PARC OFF-SHORE) Pour éviter un effet de mur quand on les observe depuis la côte, les éoliennes off-shore (en mer) sont installées en arc de cercle. Pour des raisons de sécurité, la zone délimitée en pointillés sur la carte ci-dessous est interdite à la navigation. Quelle est la superficie de la zone interdite à la circulation sur le plan ci-dessus ? On choisira une unité appropriée. Bien expliquer chaque étape de la démarche, même si elle n’aboutit pas complètement. Rédiger une phrase après chaque calcul intermédiaire.
Exercice 12 (INSTALLATIONS URBAINES) Une éolienne à axe vertical pourrait fournir en ville de l’électricité pour 3 ménages (Chauffage Electrique NON compris). 1. Recherche le nombre de ménages de la ville de Lille sur le site de l’INSEE*. 2. Combien d’éoliennes de ce type faudrait-il installer sur les toits des immeubles pour fournir de l’électricité (hors chauffage) à l’ensemble des ménages de la ville de Lille ? 3. Qu’en penses-tu ?

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
89
Exercice 12 (AIR BRASSÉ) Le schéma ci-dessous représente la colonne d’air brassée par une éolienne dans un temps donné (ici on a choisi pour l’exemple une seconde).
1. Calculer la distance d parcourue en une seconde par un vent faible dont la vitesse est de 18 km/h.
2. Calculer la surface balayée par une éolienne dont le rotor a un diamètre de 90 m.
3. Déduire des réponses précédentes le volume d’air brassé en une seconde par une éolienne dont le
rotor a un diamètre de 90 m quand le vent souffle à la vitesse de 18 km/h.
4. a. La densité de l’air est de 1,225 kg /m3 1. En déduire alors la masse d’air brassée en une seconde
par une éolienne dont le rotor a un diamètre de 90 m quand le vent souffle à la vitesse de 18 km/h.
4.b. En considérant que le poids d’un éléphant adulte est en moyenne de 6 tonnes, calculer le nombre
d’éléphants brassés en une seconde (!) par une éolienne dont le rotor a un diamètre de 90 m quand le
vent souffle à la vitesse de 18 km/h.
5. Reprendre les questions précédentes pour une éolienne géante 2 dont le rotor a un diamètre de 164
m (éolienne offshore) avec un vent fort de 45 km/h.
Exercice 13 Lorsqu’une éolienne atteint son plein régime, son rotor effectue 16 tours par minute. Si l’on considère une éolienne dont le rotor a un diamètre de 90 m, quelle est alors la vitesse en km/h à l’extrémité des pales ? 2. Quelle est en m² la superficie de la surface balayée par une éolienne dont le rotor a un diamètre de 90 m ? 3. On remplace le rotor d’un diamètre de 90 m par un rotor de diamètre 112 m. a. Par combien environ le diamètre est-il multiplié ? b. Quel pourcentage d’augmentation du diamètre cela représente-t-il à peu près ?

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
90
c. Par combien alors la surface balayée par les pales est-elle multipliée ? d. En déduire la surface balayée par une éolienne dont le rotor a un diamètre de 112 m. Comparer avec la surface d’un terrain de football de dimensions 125 m par 90 m. e. Quel est environ le pourcentage d’augmentation de la surface balayée par les pales quand on passe d’un rotor de diamètre 90 m à un rotor de diamètre 112 m ?
Corrigé des exercices
Sol (Exercice 1) :
1. Relation entre l’énergie consommée E, la puissance P et la durée de fonctionnement Δt.
E = P x Δt
Unités : E en Joules (J) P en Watt (W) Δt en seconde (s)
2. Δt = 5 min = 5 x 60 = 300 s
Soit E = 1200 x 300 = 360 000 J
3. Pour avoir E en kWh : La puissance P doit être convertie en kW : P = 1200 W = 1,200 kW
La durée Δt doit être convertie en heure : Δt = 5 min = 5/60 h D’où : E = 1,200 x 5/60 = 0,10 kWh 4. Coût de cette utilisation = 0,10 kWh x 0,10 € = 0,01 € soit 1 centime d’euro. 5. La bouilloire électrique permet de convertir l’énergie électrique en énergie thermique (Chaleur).
Sol (Exercice 2) :
1. C’est une énergie mécanique produite par le vent. C’est une énergie renouvelable, car inépuisable.
2. La puissance totale P (en kW) produite par ce parc éolien est : Chaque éolienne produit 600 000 W, soit 600 kW. Il y a 84 éoliennes dans ce parc, soit une puissance P de 84 x 600 = 50 400 kW. 3. L’énergie totale E (en kWh) produite est : E = P x Δt P = 50 400 kW et Δt = 5 000 h Soit E = 50 400 x 5 000 = 252 000 000 kWh ou 252 millions de kWh. 4. L’énergie totale ET consommée au Maroc est : E = 2% x ET = 2/100 x ET alors ET = 100 x E/2 = 50 x 252 000 000 = 12 600 000 000 kWh.
Sol (Exercice 3) :
A partir de la formule du cours du coefficient de puissance Cp :

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
91
Avec : P = 750.10 3 W V =13,8 m/s Cp = 0,2
Sol (Exercice 4) :
Sol (Exercice 5) :
1)- P = S ( - )
2)- De : P = soit :
Par simplification:
Alors :
3)-
La vitesse V2 pour laquelle, la puissance est maximale, correspond à V1 telle que :
soit :

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
92
On résout alors cette équation du second degré, d inconnue V2 :
4)- Des résultats des questions 3) et 4) :
On reporte (1) et (3) dans l’expression P = S ( - ) :
5)- D après le cours, la puissance récupérable du vent s’exprime par:
On identifie avec le résultat de la question 5) :
On trouve alors :
Cpmax=(16/27)=0.59.

Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
93
De l'énergie du vent qui est la source primaire du système éolien, on ne peut en récupérer que maximum 59 %.
C'est la limite de Betz.
Sol (Exercice 6) :
1)-
On ne récupère donc que 29 % de l’énergie due au vent.
2)- On calcul la vitesse spécifique de l’éolienne :
Donc d’après les indications du cours, il s’agit d’une éolienne rapide.
3)- On utilise le rapport du multiplicateur : 35 et la vitesse nominale de rotation du rotor : 43 tr/min. La vitesse
nominale de la génératrice recherchée est donc :
N = 35. 43 = 1505 tr/min
Sol (Exercice 7) :
La puissance mécanique produite par l’éolienne s’exprime à l’aide du coefficient de puissance Cp :
Le coefficient de couple s’exprime par :
Par simplification :
On obtient :
Bibliographie
POLYCOPIE DE COURS DES AÉROGÉNÉRATEURS
94
Bibliographie
1. Le GOURIERES, Energie éolienne, théorie, conception et calcul pratique des installations,
Eyrolles, 1982.
2. Jean-Marc NOËL, Énergie éolienne pour la fourniture d’électricité, Editions T.I, BE 8585
3. Marc RAPIN et Philippe LECONTE, Éoliennes, Editions T.I, BM 4640v2.
4. W.W. Price, J.J. Sanchez-Casca, «Simplifed wind turbine generator aerodynamic models for
transient stability studies », IEEE PSCE 2006, PP. 986-992.
A. B. Cultura, Z. M. Salameh, « Modeling and Simulation of a Wind Turbine Generator
System », in IEEE, 2011, pp.1-7.
5. J.F. WALKER, N. JENKINS, Wind energy technology, John Wiley & Sons, Inc., 1997.
6. Bernard MULTON et Michel SABLIER, Aérogénérateurs électriques, Editions T.I, d3960, 2004
Sites internet
1- http://www.edf.com/html/panorama/production/renouvelable/hydro/fonctionnement.html
2- http://www.smallwindenergy.ca/fr/Overview/HowTheyWork/ElectricityFromWind. Html
3- http://www.owen.eru.rl.ac.uk/
4- http://www.espace-eolien.fr/
5- http://www.eole.org/





























