Embed Size (px)
Citation preview

1
“PENYELESAIAN PROBLEM RUNGE-KUTTA ORDE 4, RUNGE-
KUTTA-GILL, DAN METODE SHOOTING”
(Makalah ini disusun berdasarkan soal/ problem pada presentasi“matematika Kimia 2” sebagai tugas kelompok yang ke-II, Mata
Kuliah Pemodelan Teknik Kimia Lanjut)
OLEH:
KELOMPOK 2
ANIFA TAMARA 0906635444
DEVI INDRIANI 1206180821
LELY KHOJAYANTI 1306359370
RYAN JANUAR 0906635753
ZAKKI R. MUBAROK 1306359553
FAKULTAS TEKNIK
PROGRAM STUDI TEKNIK KIMIA
PROGRAM MAGISTER UNIVERSITAS INDONESIA2
DEPOK
2013
BAB I
PENDAHULUAN
1.1. Metode Runge-Kutta
Dalam analisis numeric, metode Runge-Kutta-Gill adalah bagian
yang sangat penting terhadap iterative method implisit dan eksplisit.
Metode ini biasanya digunakan untuk permasalahan persamaan
diferensial biasa (PDB) atau ordinary differential equation
(ODE). Teknik ini dikembangkan oleh ahli matematika German C.
Runge dan M.W Kutta pada tahun 1990.
Salah satu metode Runge-Kutta yang sering digunakan adalah Runge
Kutta orde 4 atau biasa disebut "RK4", ataupun "Runge–Kutta
Metode klasik”. Berikut adalah initial value/ nilai awal yang
biasanya muncul dalam permasalahan:.
(Pada soal t0=x0 sebagai variable
bebasnya)
3
Disini nilai y adalah nilai yang tidak diketahui (scalar or
vector) terhadap waktu t (nilai yang akan didekati. Atau dengan
kata lain kita dapat mengatakan bahwa adalah laju pada
perubahan yyang merupakan fungsi dari t dan y itu sendiri.. Pada
maka korespondesi nilai y adalah sehingga fungsi f dan data
, telah ada.
Jika nilai h > 0 maka:
untuk n = 0, 1, 2, 3, . . . , maka
[1]
(Note: persamaan di atas berbeda-beda, tetapi definisi equivalennya ada dalam text
yang berbeda).[2]
Di sini adalah RK4 yang memiliki nilai yang hampir sama
dengan , dan selanjutnya nilai ( ) ditetapkan oleh nilai
( ) dan weighted average pada 4 inkremen, dimana masing-masing
inkremen adalah ukuran hasil pada interval, h, dan sebuah
4
perkiraan slope yang spesifik oleh fungsi f pada sisi kanan-
tangan dalam persamaan diferensial.
adalah inkremen berdasarkan slope pada titik awal
interval, , (Euler's method) ;
adalah inkremen berdasarkan slope pada titik tengah
interval, ;
adalah inkremen berdasarkan slope pada titik tengah
interval, ;
adalah inkremen berdasarkan slope pada titik akhir
interval, .
Rata- rata nilai dari 4 inkremen tersebut, weight yang lebih
besar diberikan kepada inkremen pada titik tengah. weights
tersebut dipilih jika adalah variable bebas tehadap , jadi
persamaannya merupakan persamaan integral yang biasa, sehingga
RK4 akan mengikuti Simpson's rule.
Metode RK4 dengan orde 4 atau dipolymath 5.0 akrab disapa RKF45, maksudnya adalah bahwa local truncation error ada di orde 5 , sedangkan akumulasi error ada di orde .
Tan Delin dan Chen Zheng telah mengembangkan metode ini menjadi:
5
untuk n = 0, 1, 2, 3, . . . , maka
Dimana nilai adalah parameter bebas. Jika diambil , ini
akan menjadi Metode Runge-Kutta klasik pada orde 4. Jika diambil
, ini akan menghasilkan beberapaMetode Runge-
Kuttalainnya pada orde 4.
1.2. Metode Shooting
Metode tembakan atau lebih dikenal dengan metode shooting ini
adalah metode yang digunakan untuk menyelesaikan masalah nilai
batas dengan menggunakan metode iterasi numeric untuk mencapai
kemiringan yang sebenarnya.
Dengan metode shooting suatu persamaan dapat diselesaikan dengan
memperkirakan mempunyai masalah nilai awal tanpa terlebih dahulu
menyelesaikan masalah nilai batas. Kemudian kita dapat
menggabungkan persamaan untuk mendapatkan solusi pendekatan,6
dengan harapan. Jika tidak, kita dapat mengubah nilai terkaan dan
mencobanya lagi.
Pada metode shooting, tidak ada jaminan konvergensi dari
iterasinya, tetapi metodenya mudah digunakan. Dan bila konvergen,
biasanya metode ini lebih efisien dari pada metode yang lain.
7
BAB II
PEMBAHASAN
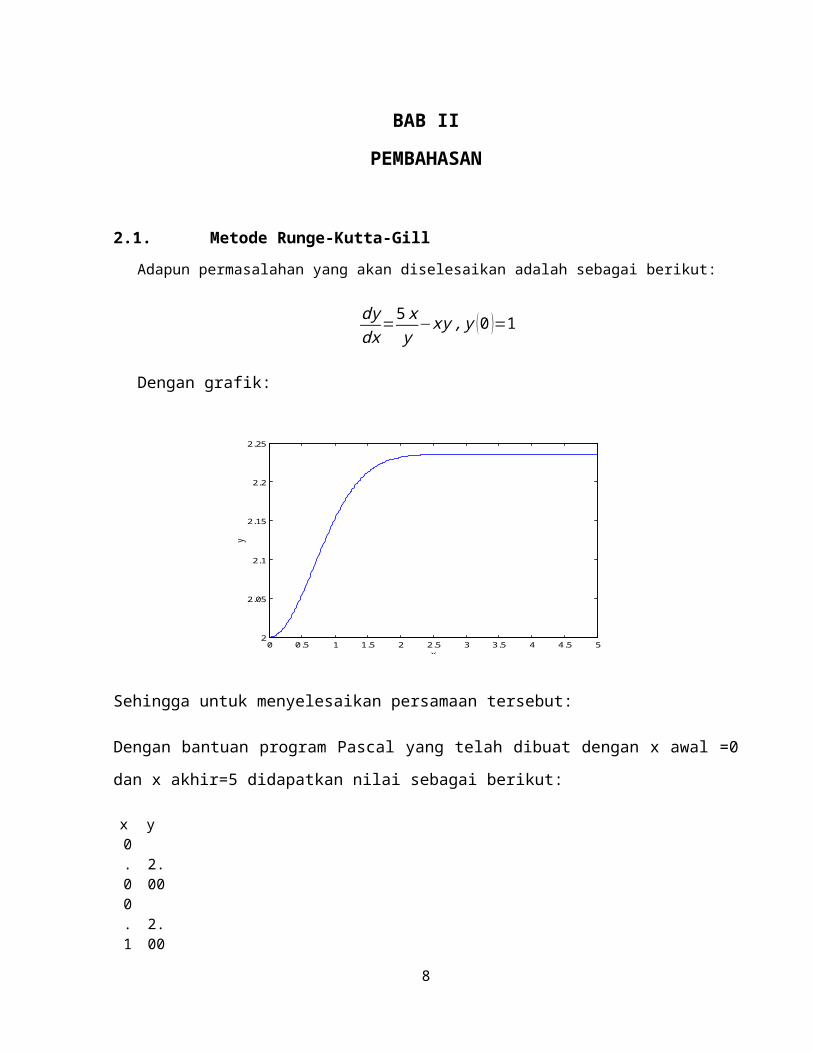
2.1. Metode Runge-Kutta-GillAdapun permasalahan yang akan diselesaikan adalah sebagai berikut:
dydx=5x
y−xy,y (0 )=1
Dengan grafik:
Sehingga untuk menyelesaikan persamaan tersebut:
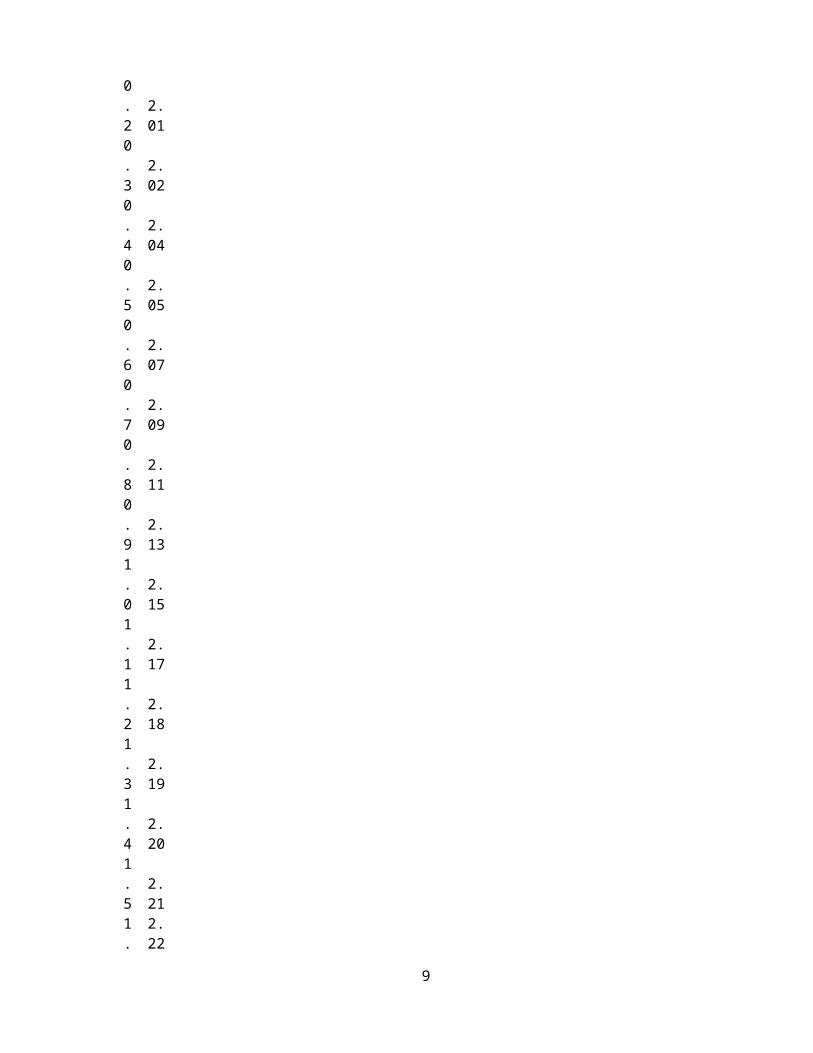
Dengan bantuan program Pascal yang telah dibuat dengan x awal =0
dan x akhir=5 didapatkan nilai sebagai berikut:
x y0.0
2.00
0.1
2.00
8
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 52
2.05
2.1
2.15
2.2
2.25
y
x
0.2
2.01
0.3
2.02
0.4
2.04
0.5
2.05
0.6
2.07
0.7
2.09
0.8
2.11
0.9
2.13
1.0
2.15
1.1
2.17
1.2
2.18
1.3
2.19
1.4
2.20
1.5
2.21
1.
2.22
9
61.7
2.22
1.8
2.23
1.9
2.23
2.0
2.23
2.1
2.23
2.2
2.23
2.3
2.23
2.4
2.24
2.5
2.24
2.6
2.24
2.7
2.24
2.8
2.24
2.9
2.24
3.0
2.24
3 2.
10
.1 243.2
2.24
3.3
2.24
3.4
2.24
3.5
2.24
3.6
2.24
3.7
2.24
3.8
2.24
3.9
2.24
4.0
2.24
4.1
2.24
4.2
2.24
4.3
2.24
4.4
2.24
4.5
2.24
11
4.6
2.24
4.7
2.24
4.8
2.24
4.9
2.24
5.0
2.24
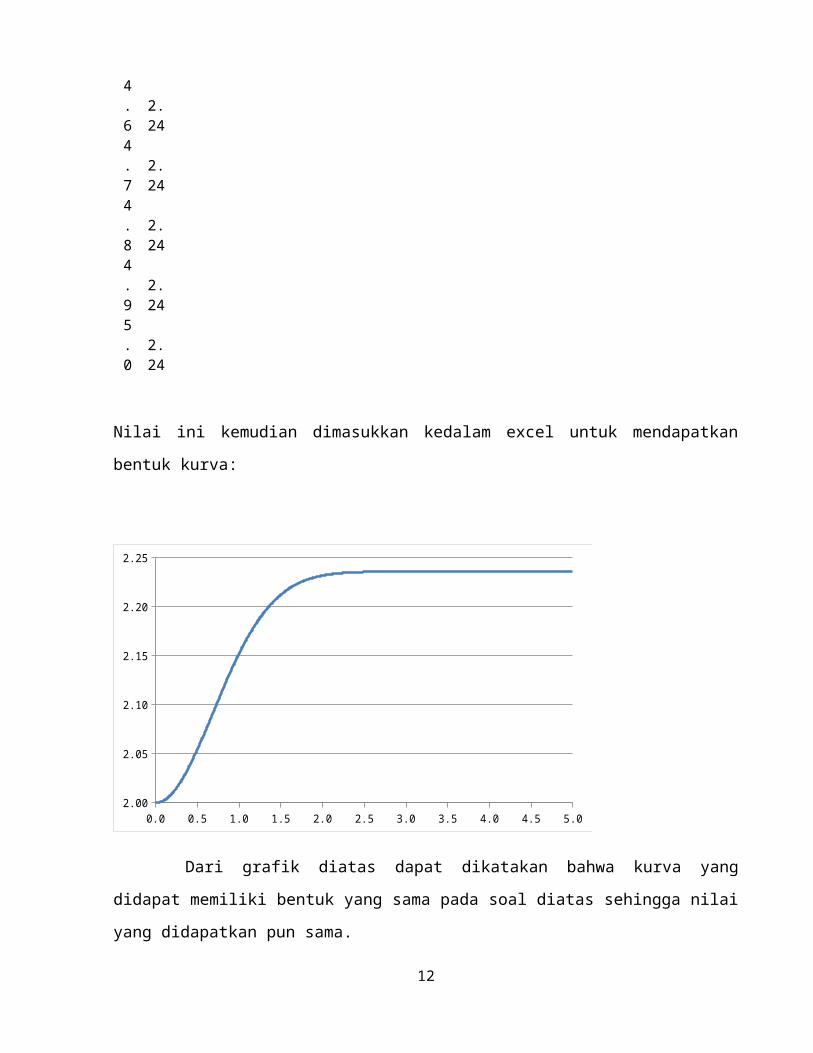
Nilai ini kemudian dimasukkan kedalam excel untuk mendapatkan
bentuk kurva:
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.02.00
2.05
2.10
2.15
2.20
2.25
Dari grafik diatas dapat dikatakan bahwa kurva yang
didapat memiliki bentuk yang sama pada soal diatas sehingga nilai
yang didapatkan pun sama.
12
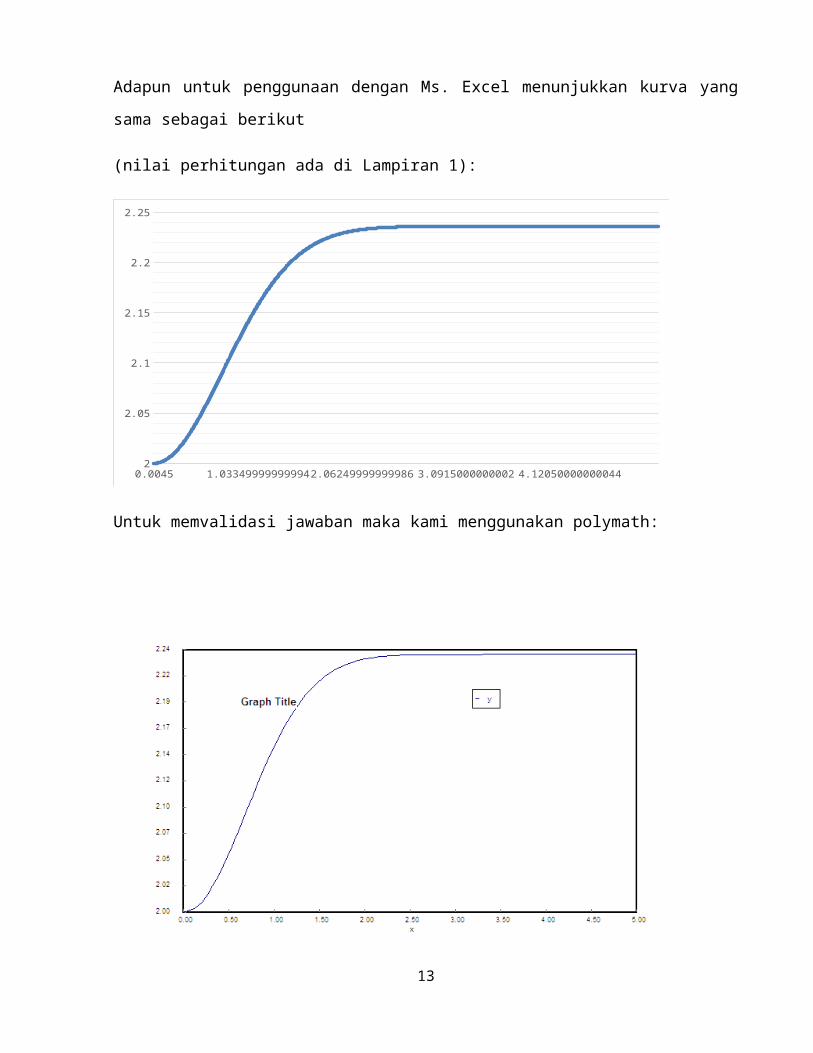
Adapun untuk penggunaan dengan Ms. Excel menunjukkan kurva yang
sama sebagai berikut
(nilai perhitungan ada di Lampiran 1):
0.0045 1.033499999999942.06249999999986 3.0915000000002 4.120500000000442
2.05
2.1
2.15
2.2
2.25
Untuk memvalidasi jawaban maka kami menggunakan polymath:
13
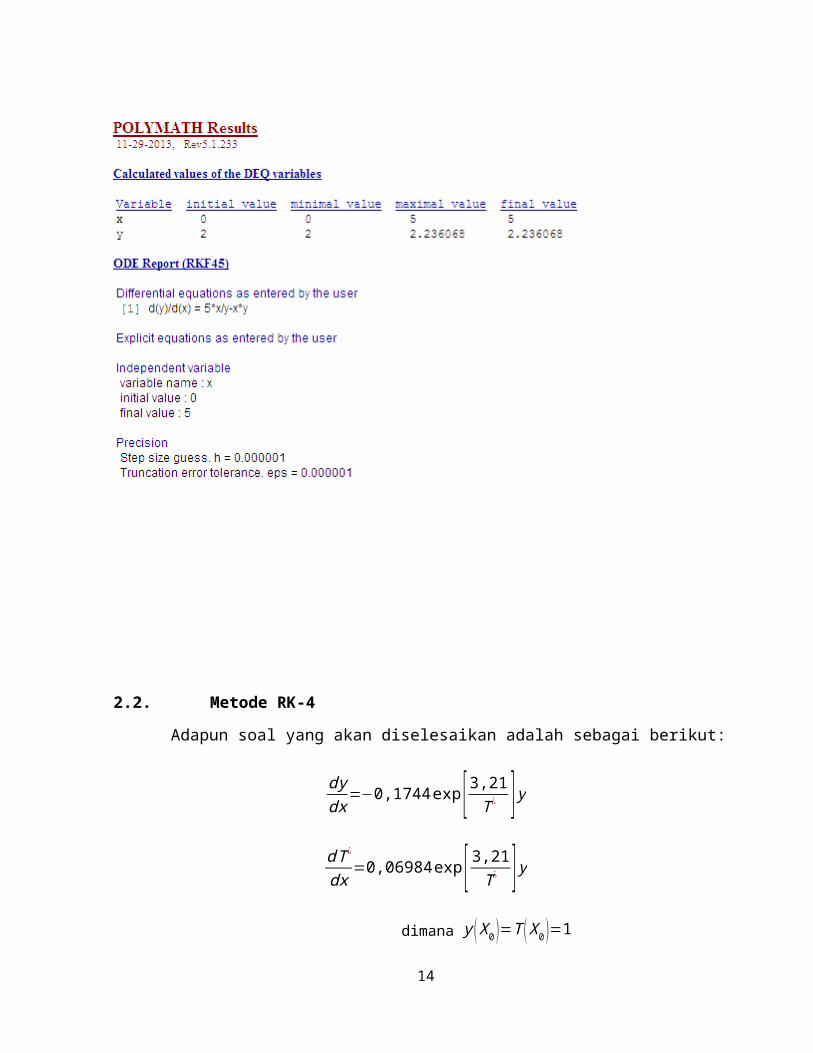
2.2. Metode RK-4
Adapun soal yang akan diselesaikan adalah sebagai berikut:
dydx=−0,1744exp [3,21T¿ ]ydT¿dx =0,06984exp[ 3,21T¿ ]y
dimana y (X0 )=T (X0 )=1
14
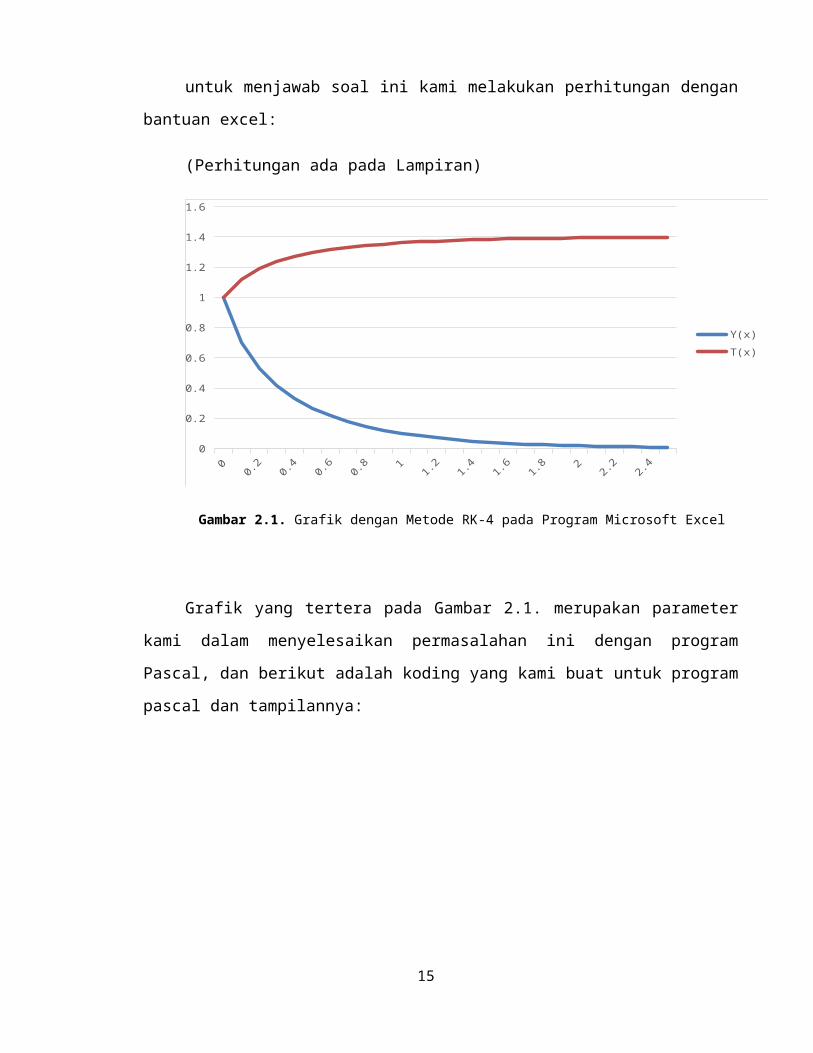
untuk menjawab soal ini kami melakukan perhitungan dengan
bantuan excel:
(Perhitungan ada pada Lampiran)
00.2
0.4
0.6
0.8 1
1.2
1.4
1.6
1.8 2
2.2
2.4
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Y(x)T(x)
Gambar 2.1. Grafik dengan Metode RK-4 pada Program Microsoft Excel
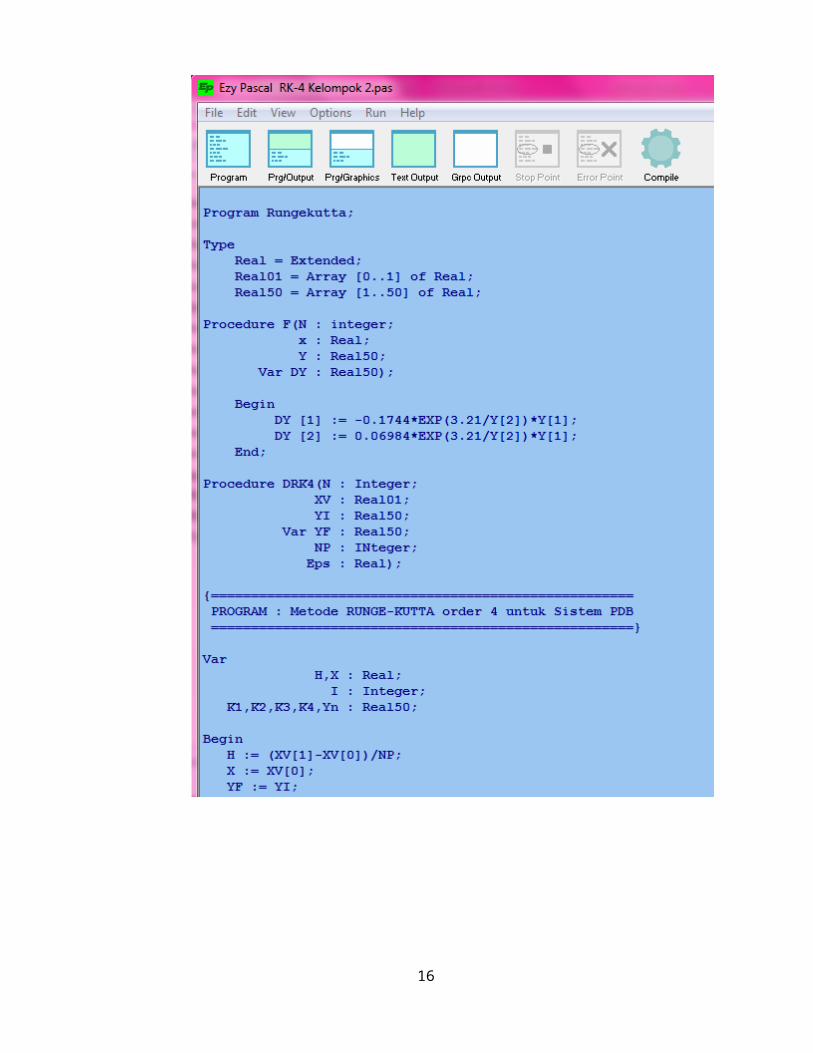
Grafik yang tertera pada Gambar 2.1. merupakan parameter
kami dalam menyelesaikan permasalahan ini dengan program
Pascal, dan berikut adalah koding yang kami buat untuk program
pascal dan tampilannya:
15
16
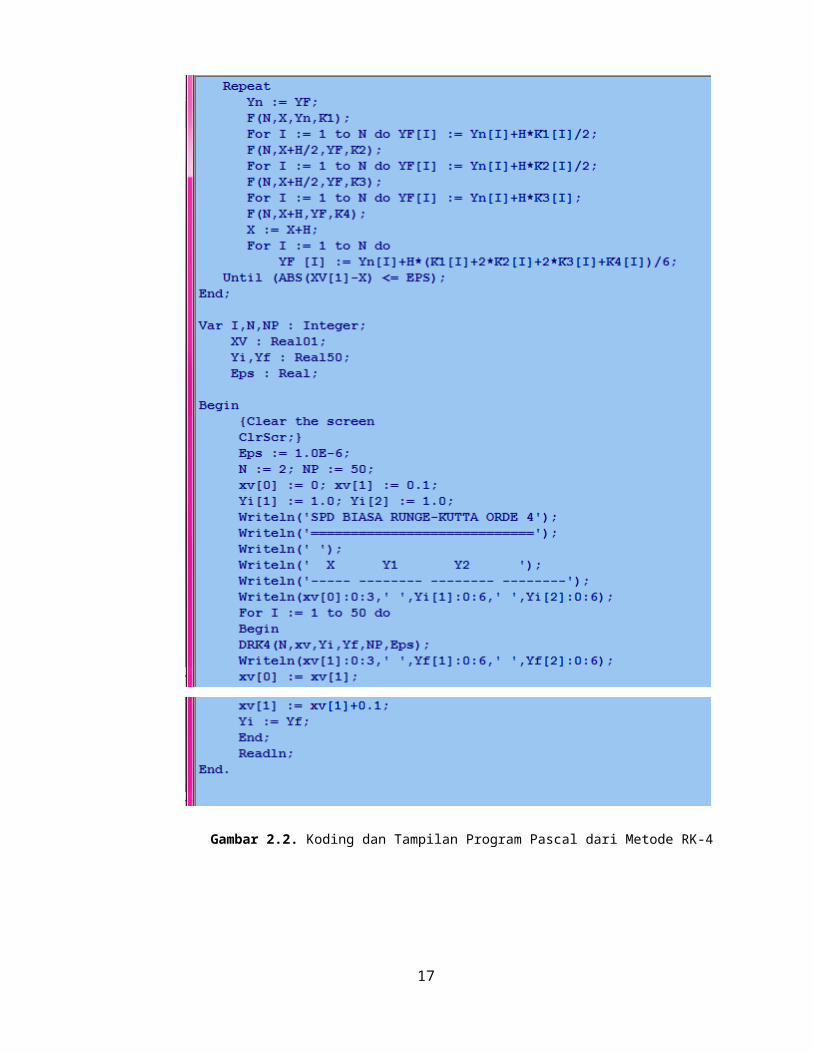
Gambar 2.2. Koding dan Tampilan Program Pascal dari Metode RK-4
17
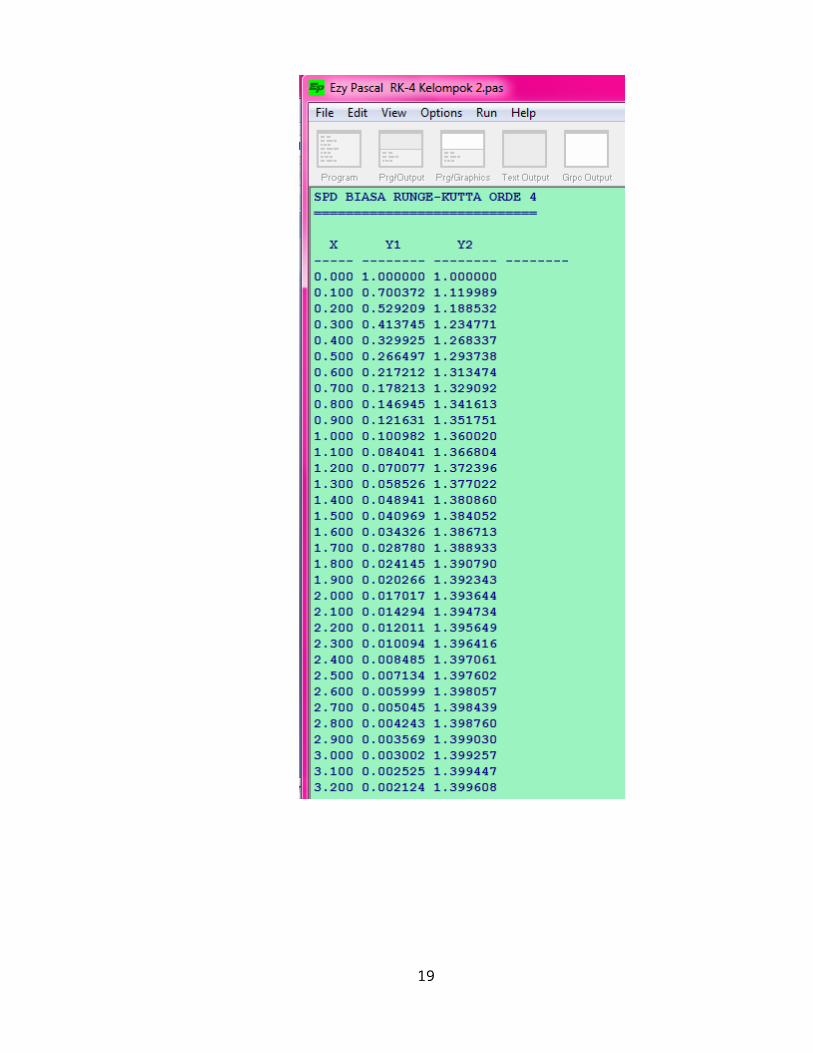
Dengan me-compile dan me-running koding tersebut, akhirnya kami
mendapatkan nilai x,y1 dan y2. Berikut tampilan dari program Pascal
tersebut:
18
19
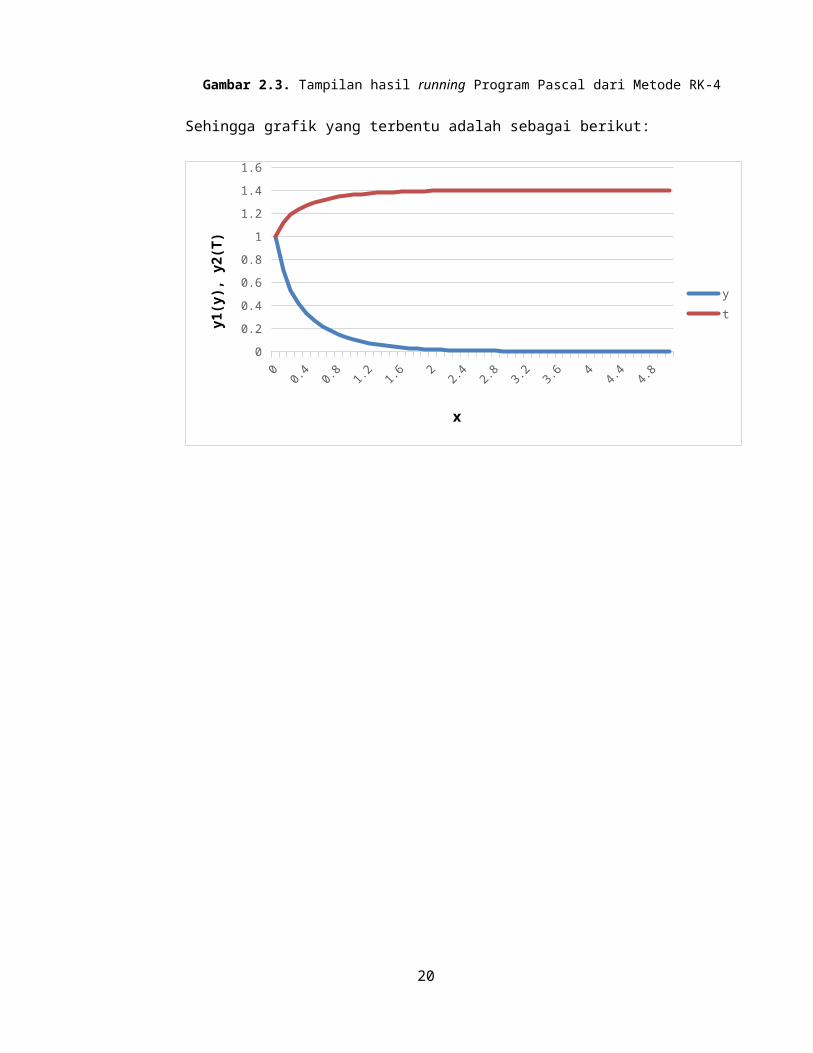
Gambar 2.3. Tampilan hasil running Program Pascal dari Metode RK-4
Sehingga grafik yang terbentu adalah sebagai berikut:
00.20.40.60.81
1.21.41.6
yt
x
y1(y), y2(T)
20
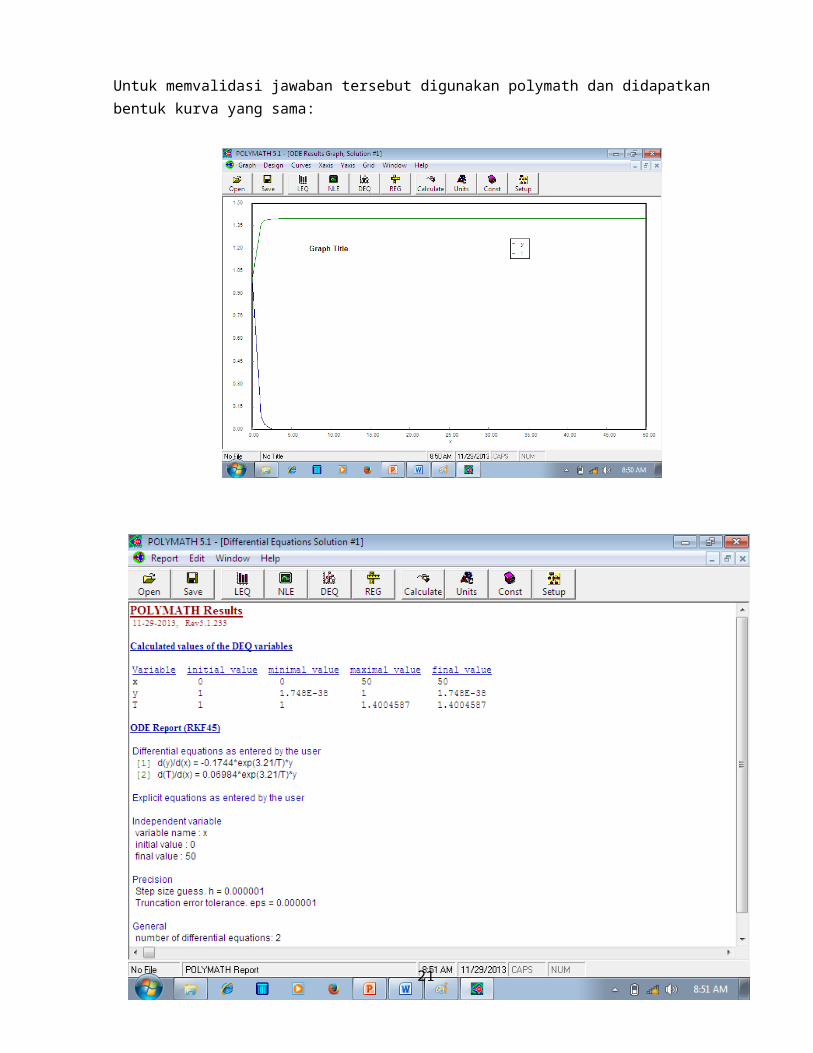
Untuk memvalidasi jawaban tersebut digunakan polymath dan didapatkan bentuk kurva yang sama:
21
2.3. Metode shooting
Adapun soal yang akan diselesaikan adalah sebagai berikut:
dy1dx=xy1+y2
dy2dx=y1+y2
y1 (0 )=0
y2 (1 )=1
y2(0)taksiran=1
ε=0,000001
Metode RK4 dengan h=0,1dg=1
Adapun penyelesaiannya adalah sebagai berikut:
PDB : dy1dx=xy1+y2
dy2dx=y1+y2
Kondisi Batas : y1 (0 )=0y2 (1 )=1
Kondisi awal taksiran untuk y2 : y2(0)taksiran=γ=1
Tujuan: mendapatkan nilai yang menghasilkan y2(xf,) yangmemenuhi kondisi batas yang diketahui y2,f, yaitu:
y2(xf,γ)❑=y2,f=1
Penyusunan kembali:
0γ,γ ,22 ff yxy
22
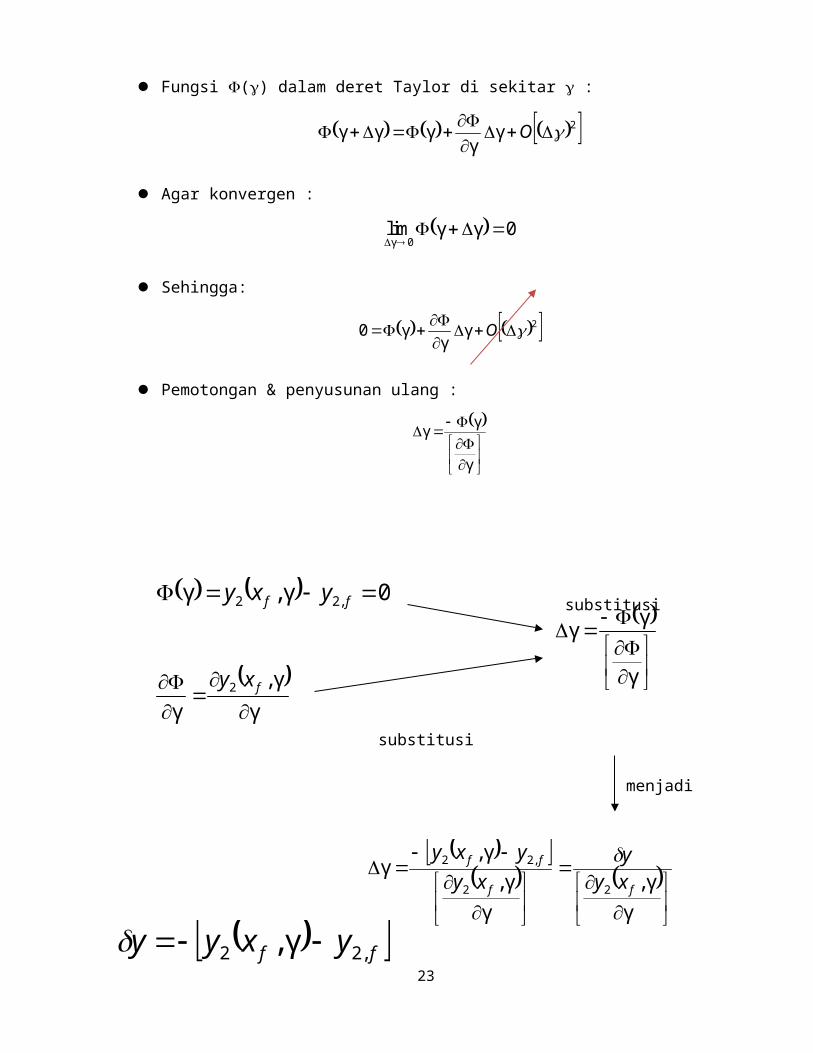
Fungsi () dalam deret Taylor di sekitar :
2γγγγγ
O
Agar konvergen :
0γγlim0γ
Sehingga:
2γγγ0
O
Pemotongan & penyusunan ulang :
γ
γγ
substitusi
substitusi
menjadi
23
γ
γγ 0γ,γ ,22 ff yxy
γγ,
γ2
fxy
γγ,
γγ,
γ,γ22
,22
ff
ff
xyy
xyyxy
ff yxyy ,22 γ,
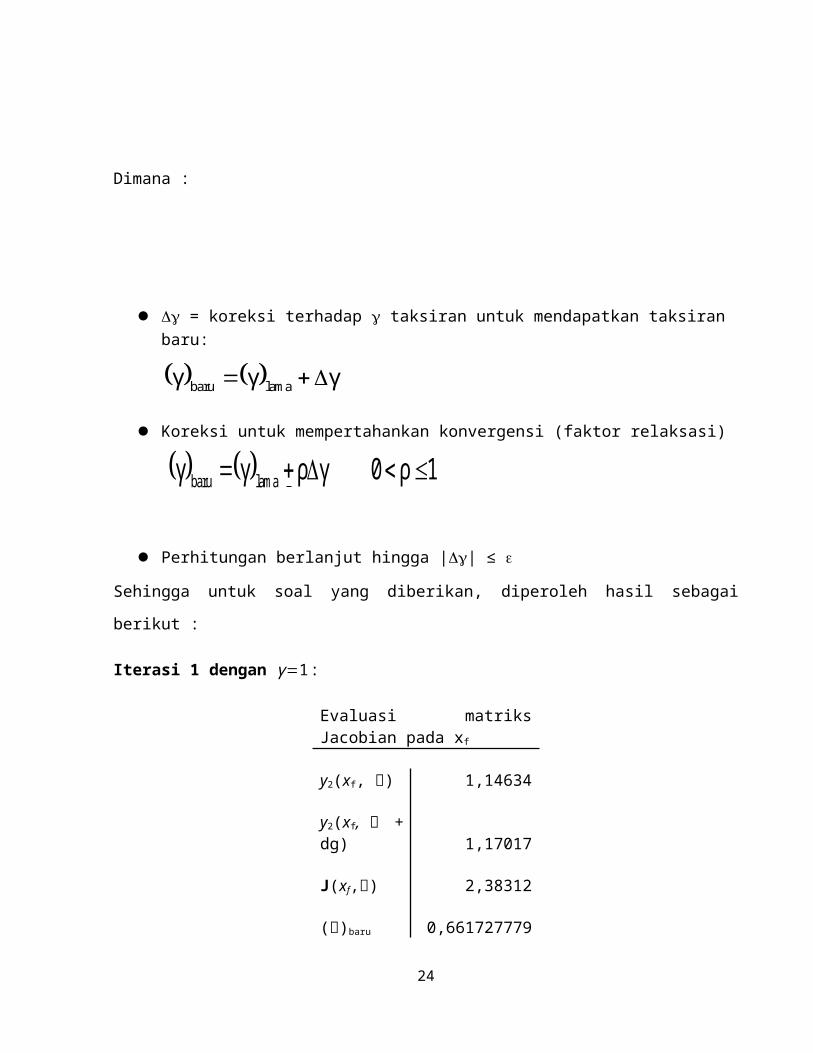
Dimana :
= koreksi terhadap taksiran untuk mendapatkan taksiran baru:
γγγ lamabaru
Koreksi untuk mempertahankan konvergensi (faktor relaksasi)
Perhitungan berlanjut hingga || ≤
Sehingga untuk soal yang diberikan, diperoleh hasil sebagai
berikut :
Iterasi 1 dengan γ=1:
Evaluasi matriksJacobian pada xf
y2(xf, ) 1,14634
y2(xf, +dg) 1,17017
J(xf,) 2,38312
()baru 0,661727779
24
1ρ0 γργγ lamabaru
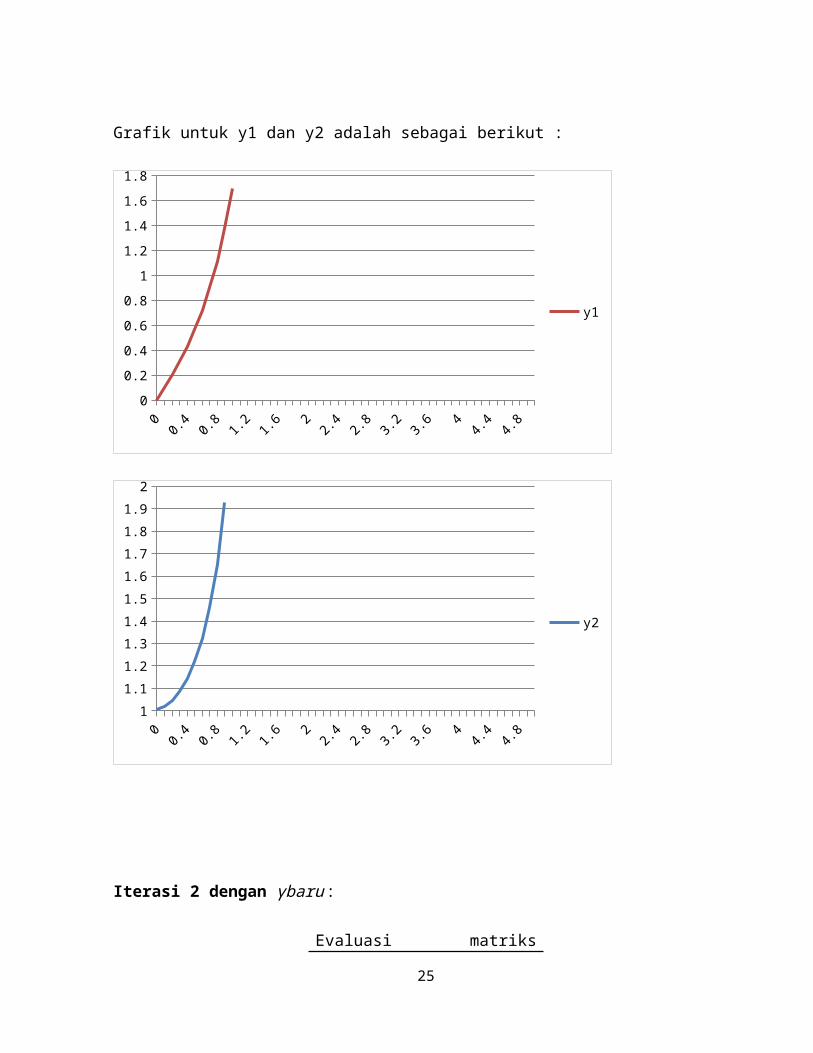
Grafik untuk y1 dan y2 adalah sebagai berikut :
00.20.40.60.81
1.21.41.61.8
y1
11.11.21.31.41.51.61.71.81.92
y2
Iterasi 2 dengan γbaru:
Evaluasi matriks
25
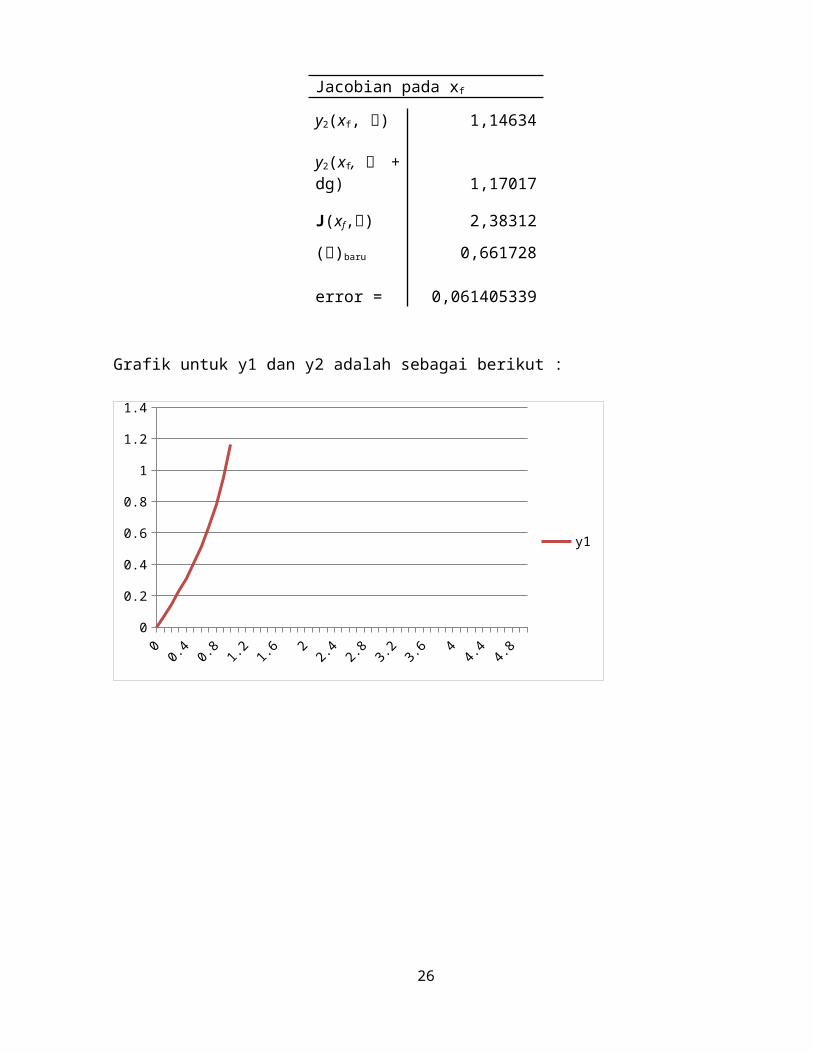
Jacobian pada xf
y2(xf, ) 1,14634
y2(xf, +dg) 1,17017
J(xf,) 2,38312()baru 0,661728
error = 0,061405339
Grafik untuk y1 dan y2 adalah sebagai berikut :
0
0.2
0.4
0.6
0.8
1
1.2
1.4
y1
26
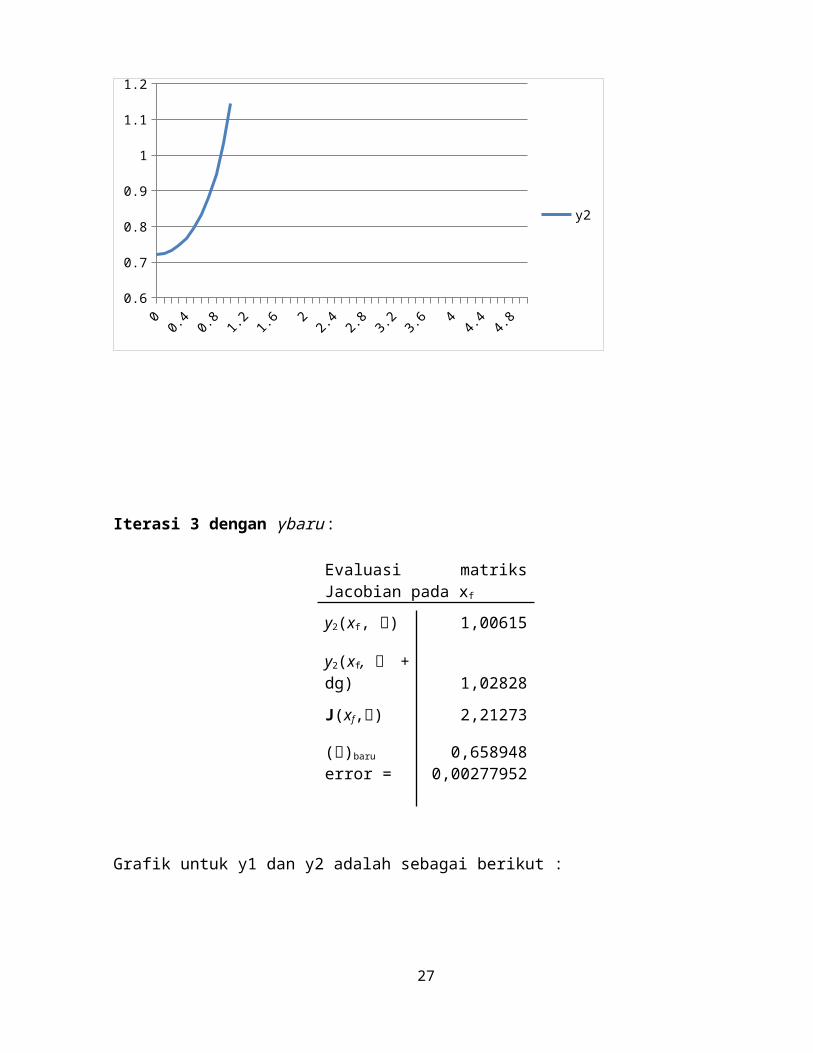
0.6
0.7
0.8
0.9
1
1.1
1.2
y2
Iterasi 3 dengan γbaru:
Evaluasi matriksJacobian pada xf
y2(xf, ) 1,00615
y2(xf, +dg) 1,02828J(xf,) 2,21273
()baru 0,658948error = 0,00277952
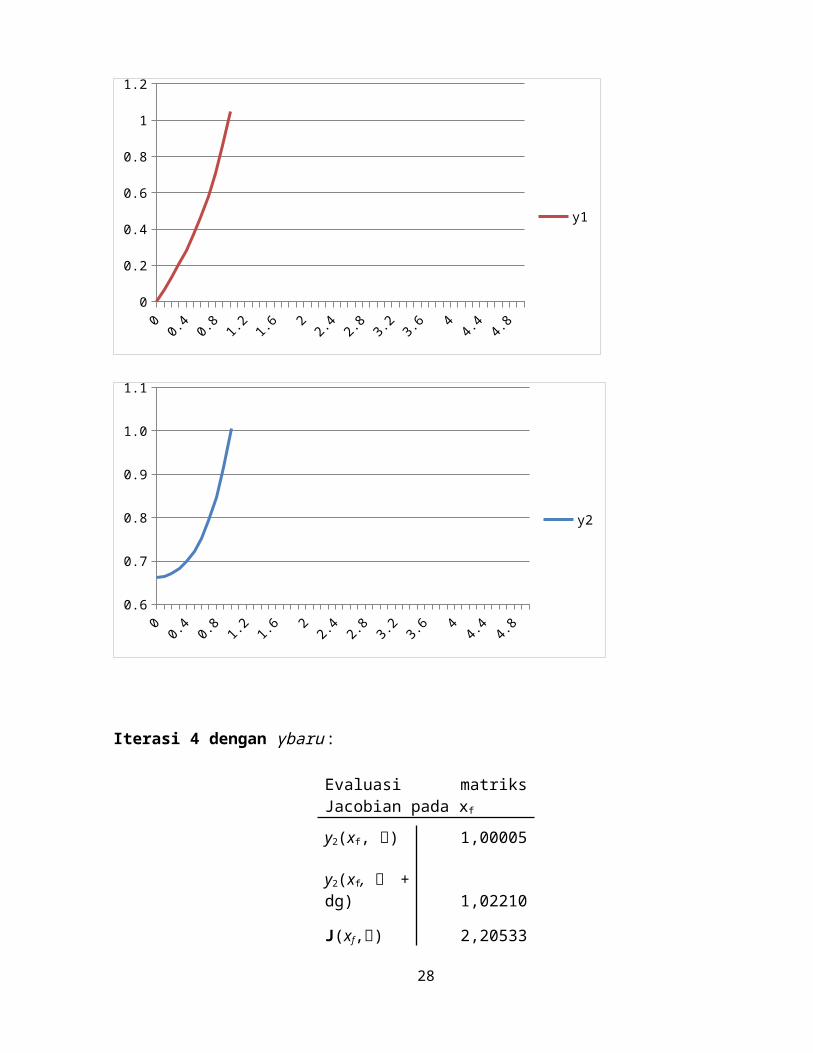
Grafik untuk y1 dan y2 adalah sebagai berikut :
27
0
0.2
0.4
0.6
0.8
1
1.2
y1
0.6
0.7
0.8
0.9
1.0
1.1
y2
Iterasi 4 dengan γbaru:
Evaluasi matriksJacobian pada xf
y2(xf, ) 1,00005
y2(xf, +dg) 1,02210
J(xf,) 2,20533
28
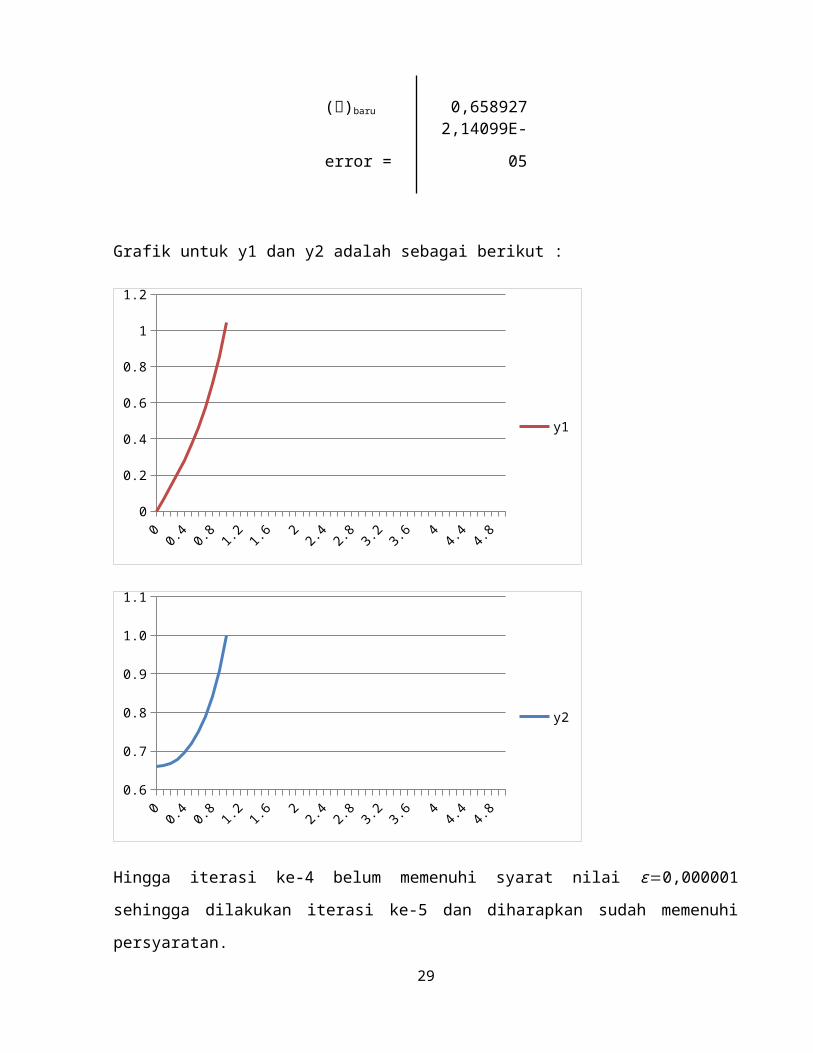
()baru 0,658927
error =
2,14099E-
05
Grafik untuk y1 dan y2 adalah sebagai berikut :
0
0.2
0.4
0.6
0.8
1
1.2
y1
0.6
0.7
0.8
0.9
1.0
1.1
y2
Hingga iterasi ke-4 belum memenuhi syarat nilai ε=0,000001sehingga dilakukan iterasi ke-5 dan diharapkan sudah memenuhi
persyaratan.
29
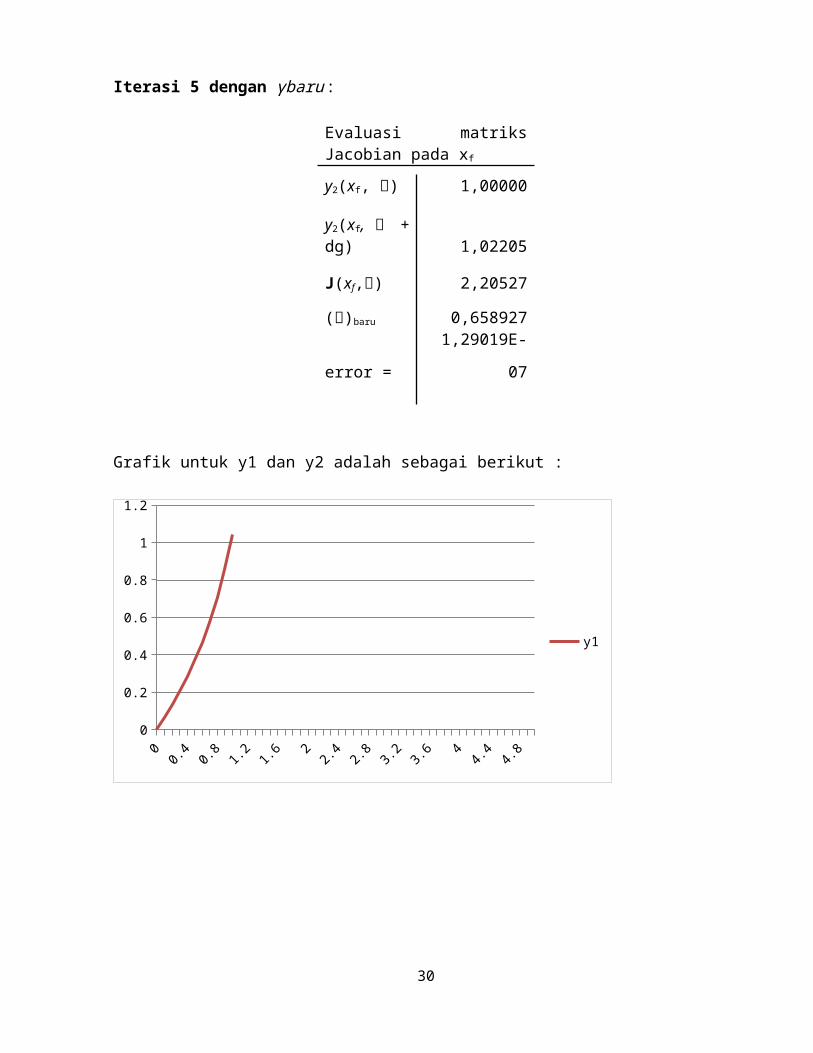
Iterasi 5 dengan γbaru:
Evaluasi matriksJacobian pada xf
y2(xf, ) 1,00000
y2(xf, +dg) 1,02205
J(xf,) 2,20527
()baru 0,658927
error =
1,29019E-
07
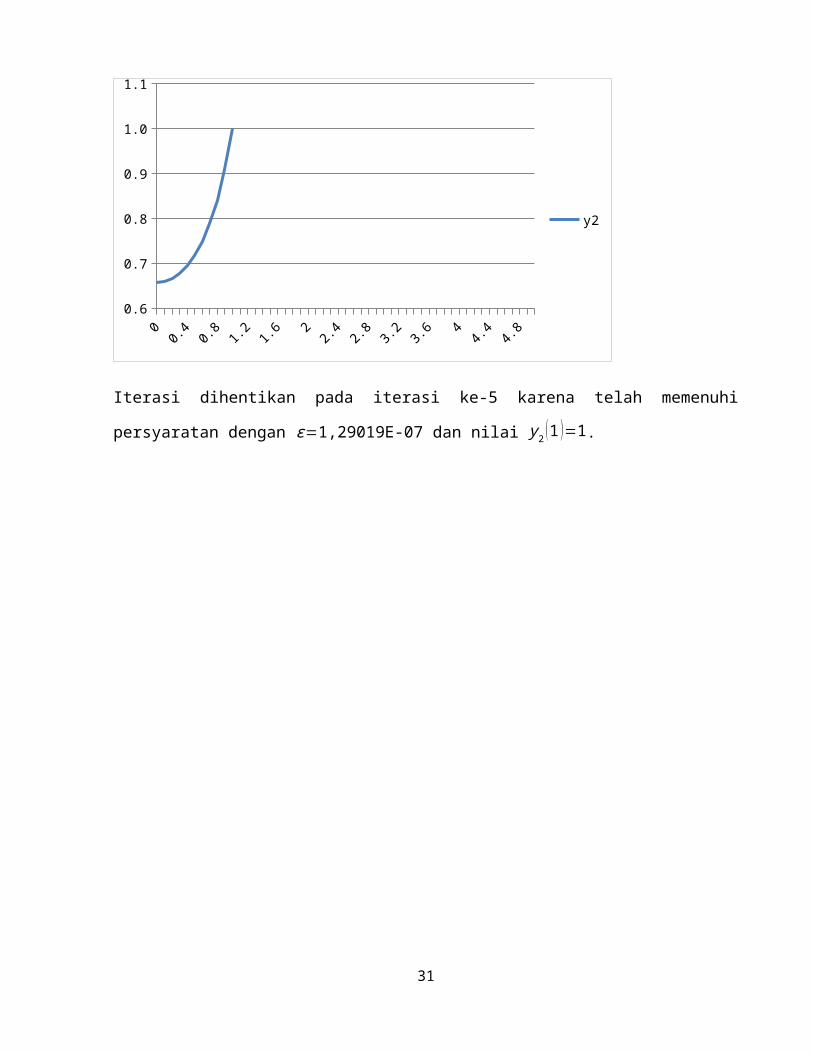
Grafik untuk y1 dan y2 adalah sebagai berikut :
0
0.2
0.4
0.6
0.8
1
1.2
y1
30
0.6
0.7
0.8
0.9
1.0
1.1
y2
Iterasi dihentikan pada iterasi ke-5 karena telah memenuhi
persyaratan dengan ε=1,29019E-07 dan nilai y2 (1 )=1.
31
BAB III
KESIMPULAN
Berdasarkan penggunaaan Ms. Excel, Pascal dan polymath untuk RK-
Gill dan RK 4 diketahui bahwa bentuk kurva yang muncul memililki
bentuk yang sama antara satu dengan yang lain. Hal ini menandakan
bahwa nilai yang didapat mendekati dengan nilai yang sebenarnya
pada soal. Sedangkan untuk metode shooting telah didapatkan nilai
y baru sama dengan 0,658927.
32





























