Embed Size (px)
Citation preview

Estados Estable y Dinámico
Miguel Ocharán P.
Mig
ue
l Oc
ha
rán
P.
MAQUINAS
ASÍNCRONAS
MAQUINAS
ASÍNCRONASMA
QU
INA
SA
SÍN
CR
ON
AS
Esta
do
s Esta
ble
y Din
ám
ico

1
Máquinas Asincronas - Estados Estable y Dinámico
ASAMBLEA NACIONAL DE RECTORES2004
MÁQUINAS ASINCRONAS
ESTADOSESTABLE Y DINÁMICO
M. Ocharán P.

2
Miguel Ocharán P.a
© M. Ocharán P.
© Asamblea Nacional de RectoresCalle Aldabas Nº 337 - Urb. Las Gardenias - Surco
Derechos ReservadosISBN:Nº 9972-9390-4-9Hecho el Depósito LegalRegistro Nº 150101-2004-8993Tiraje: 1000 ejemplares
Impreso en Perú - Printed in Peru
Primera edición: enero de 2005

3
Máquinas Asincronas - Estados Estable y Dinámico
“La presente obra obtuvo el segundo puesto
en el área de Tecnologías en el I Concurso del Libro Universitario 2004,
organizado por la Asamblea Nacional de Rectores, Lima, Perú”

4
Miguel Ocharán P.a

5
Máquinas Asincronas - Estados Estable y Dinámico
PRÓLOGO
La presente edición recoge parte del esfuerzo desarrollado durante los añosde estudios de la Maestría en Ingeniería Eléctrica y Doctorado en Energética delautor, en particular con relación a los trabajos de investigación sobre las máquinasasíncronas con rotor tipo jaula de ardilla, y trata de orientar y motivar al lectorpara el estudio de los regímenes especiales de dichas máquinas eléctricas.Entre los principales regímenes especiales que presentan los motores asíncronostenemos los de arranque, inversión de giro, parada, etc., los mismos que sondenominados regímenes dinámicos o regímenes transitorios. Son también parte deellos sus procesos térmicos -estacionarios y dinámicos- asociados.
Gracias al estudio de estos temas se puede realizar una óptima selección desistemas de arranque, optimizar el consumo de energía y mejorar el comportamientode la máquina en diversas aplicaciones, con el fin de obtener un máximo deeficiencia. Evidentemente, para lograr este propósito, es necesario estarfamiliarizado con las nociones básicas de las máquinas asíncronas; y el primerobjetivo al escribir este libro- pensando en los estudiantes de pregrado en ingenieríaeléctrica y especialidades afines-, es brindarles una aproximación a las máquinaseléctricas de inducción denominadas máquinas asíncronas, en particular al «motorasíncrono». El segundo objetivo esta orientado a alentar y de alguna maneratransmitir nuestras experiencias e investigaciones a los estudiantes y profesoresde posgrado en ingeniería, buscando contribuir en la exploración e investigaciónde los problemas relacionados con el funcionamiento en general de las máquinaseléctricas.
Elaborar un libro a partir de un trabajo de investigación, aún en desarrollo, ypropender que dicho libro sea útil para la formación académica universitaria ytécnica es, para los no expertos, como es nuestro caso, una tarea sumamenteengorrosa y desconocida, sin embargo, no menos gratificante y aleccionadora.Saludamos la iniciativa de la Asamblea Nacional de Rectores, al incentivar laescritura de este tipo de trabajos, lo que con seguridad contribuirá al desarrollocientífico y tecnológico del país.
El presente libro consta de dos partes y siete capítulos en total. La primeraparte esta dedicada a centrar el objeto de la investigación subyacente asociada allibro. Esta parte consta de cinco capítulos. En el primer capítulo se desarrollan losconceptos fundamentales, la clasificación y la normatividad asociada al diseño yoperación de las máquinas eléctricas en general. En el segundo capítulo se trataacerca de las generalidades de los procesos de transformación de energía en lasmáquinas eléctricas.

6
Miguel Ocharán P.a
El tercer capítulo se centra en los aspectos relativos a las máquinas asíncronaspropiamente dichas: sus nociones generales, la información necesaria para su diseñoy construcción y los aspectos constructivos más relevantes. En el cuarto capítulose aborda el problema de diseño del motor asíncrono, esto es a la determinaciónde sus parámetros, en particular de un motor asíncrono trifásico de media potencia,desarrollando una metodología sobre la base de un ejemplo de cálculo específicoy que precisamente corresponde al objeto de nuestra investigación. El quinto capítuloestá asociado al comportamiento de las máquinas asíncronas en régimen estable oestacionario. Hasta allí es un tratamiento cuasi convencional del tema.
La segunda parte del libro consta de los dos últimos capítulos. El capítulo seisque trata sobre los fenómenos térmicos asociados a las máquinas eléctricas, en elque se desarrolla toda una metodología para el cálculo y en donde, otra vez, en elcálculo ejemplarizador se utiliza el motor objeto del estudio. Finalmente el capítulosiete, en el que se enfocan los conceptos relativos al estudio de los regímenes dealta complejidad o procesos transitorios en accionamientos asíncronos, los principiosbásicos para modelar matemáticamente al motor asíncrono, los métodos numéricosde solución de ecuaciones diferenciales, y notas del proceso experimental delmotor asíncrono, en sus diferentes formas de comportamiento, sobre la base delos programas computacionales (adjuntos en medio magnético) desarrollados porel autor en sus trabajos de investigación;complementariamente se proponen unconjunto de preguntas para el lector las cuales sirven como cuestionario deevaluación práctica del tema central desarrollado.
Es necesario recalcar que no se pretende cubrir in extenso y exhaustivamenteel tema de las máquinas asíncronas en el presente libro, en particular en lo contenidoen la primera parte; pues, como sabemos, existen numerosos textos de gran calidady que más bien han sido nuestros referentes y guías permanentes y cuya informaciónhemos sintetizado. El objetivo, a través de esta primera parte, es hacer una rápidarevista sobre los tópicos más relevantes y preparar la información básica asociadaal objeto de investigación. En lo que corresponde a la segunda parte, nuestrapretensión es divulgar un proceso de investigación aún en marcha. Finalmentequiero expresar mi gratitud a mis colaboradores, en especial a GVChO, FUM yMMA.
El Autor

7
Máquinas Asincronas - Estados Estable y Dinámico
CONTENIDO
PARTE 11 LAS MAQUINAS ELECTRICAS
1.1 Definiciones fundamentales 131.2 Clasificación de las máquinas eléctricas 15
1.2.1 Clasificación General 151.2.2 Clasificación de las máquinas eléctricas de inducción rotatorias 16
1.3 Normas 171.3.1 Alcances 171.3.2 Entidades y Normas tomadas como referencia 181.3.3 Generalidades 191.3.4 Protección ambiental y métodos de enfriamiento 20
2 GENERALIDADES ACERCA DE LOS PROCESOS DE TRANSFORMACIONDE ENERGIA EN LAS MAQUINAS ELECTRICAS
2.1 Procesos electromecanicos y electromagneticos 232.2 Campo magnetico 28
2.2.1 Campo magnético con variación periódico en el tiempo 282.2.2 Ecuaciones y características del campo electromagnético 292.2.3 Campo en el entrehierro 322.2.4 Campo magnético de inducción mutua 322.2.5 Campo fundamental y campo de dispersión 332.2.6 Longitud calculada del circuito magnético 342.2.7 Inductancias 34
2.3 METODOS FINITOS PARA CAMPOS ELECTROMAGNETICOS22
2.3.1 Definición del método 362.3.2 Construcción del elemento finito 362.3.3 Ecuación de Laplace 362.3.4 Ecuación de Poisson 372.3.5 Programación y estructuración de datos 372.3.6 Representación de campos electromagnéticos 382.3.7 Elementos triangulares para la ecuación esclar de Helmholtz 382.3.8 Formulación del problema de potencial con simetría de traslación 382.3.9 Formulación del problema de potencial con simetría axial 392.3.10 Solución numérica de ecuaciones de elementos finitos 392.3.11 Programa FEMM 39
2.4 Momento electromagnético de rotación 392.5 Transformación unidireccional de la energía 442.6 Pérdidas en los procesos de transformación 46

8
Miguel Ocharán P.a
2.6.1 Eficiencia 462.6.2 Pérdidas eléctricas 482.6.3 Pérdidas magnéticas 482.6.4 Pérdidas mecánicas 51
3 LAS MÁQUINAS ASÍNCRONAS3.1 Nociones generales 533.2 Datos para el diseño y fabricación 543.3 Aspectos constructivos del motor con rotor cortocircuitado 55
3.3.1 Partes activas del estator 553.3.2 Partes activas del rotor 56
4 PARÁMETROS DE LA MÁQUINA ASÍNCRONA TRIFÁSICA4.1 Eficiencia y factor de potencia 594.2 Tamaños principales 594.3 Partes activas del estator 644.4 Partes activas del rotor 744.5 Flujos de magnetización 774.6 Parámetros de la máquina 824.7 Pérdidas 87
5 LA MÁQUINA ASÍNCRONA EN ESTADO ESTABLE5.1 Marcha en vacío 915.2 Régimen de carga 925.3 Características de carga y operación de la maquina asíncrona 945.4 Arranque 955.5 Regulación de la frecuencia de rotación 975.6 Efecto de expulsión de la corriente 98
6 CALCULOS TERMICOS EN MÁQUINAS ASÍNCRONAS6.1 Sobrecalentamientos, cálculos térmicos y normas 1036.2 Transmisión térmica en la máquina asíncrona cerrada 1056.3 Conceptos básicos y leyes 1096.4 Circuito térmico equivalente de la máquina asíncrona cerrada 1126.5 Método de cálculo de circuito térmico equivalente 1146.6 Método del cálculo térmico 1176.7 Cálculo del circuito térmico equivalente 1286.8 Consideraciones para el cálculo 1306.9 Resultados del cálculo 131
7 LA MÁQUINA ASÍNCRONA EN ESTADO DINÁMICO7.1 Procesos transitorios electromagnéticos 1377.2 Generalidades acerca del modelo matemático en máquinas asíncronas 138
7.2.1 Modelo matemático del motor asíncrono trifásicocon rotor cortocircuitado 138

9
Máquinas Asincronas - Estados Estable y Dinámico
7.2.2 Relación entre las inductancias propias e inductancias mutuasde los devanados y parámetros energéticos empleados enla teoría de la máquina asíncrona trifásica 144
7.2.3 Sentido físico de las fórmulas de conversión 1487.2.4 Transformación de ecuaciones diferenciales de
las máquinas asíncronas 1547.3 Métodos numéricos para la solución del modelo matemático 162
7.3.1 Método de Runge Kutta 1637.3.2 Método de aproximación polinomial 1657.3.3 Solución de ecuaciones diferenciales rígidas. Método de Gir. 170
7.4 Programas RKGS y DVOGER 1717.5 Cálculo térmico en estado dinámico 1747.6 Programas computaciones 178
7.6.1 Introducción 1787.6.2 Aplicación de los programas 1797.6.3 Condiciones iniciales y datos de partida 1807.6.4 Análisis y discusión de resultados 181
7.7 Procedimiento experimental para verificación del modelo 1827.7.1 Objetivo 1827.7.2 Secuencia de la experiencia 1827.7.3 Recomendaciones para la realización de la experiencia 1837.7.4 Cuestionario 185
BIBLIOGRAFÍA 187
APENDICES 191
MATERIAL MAGNETICO PROGRAMAS COMPUTACIONALES

10
Miguel Ocharán P.a

11
Máquinas Asincronas - Estados Estable y Dinámico
INTRODUCCIÓN
Dentro de los problemas a resolver en el proceso del desarrollo industrial, tenemosel mejoramiento de los procesos tecnológicos y el incremento de la productividad detrabajo en la industria en general. En la solución de estos problemas juega un papelimportante el accionamiento eléctrico automatizado.Uno de los elementos más importantes en la mayoría de las etapas de producción endiferentes especialidades en el país es el accionamiento eléctrico con motor asíncrono,el cual también se denomina accionamiento asíncrono o simplemente motor asíncrono.En los últimos años han aparecido trabajos de investigación acerca de procesostransitorios en acciónamientos asíncronos. Los temas de mayor atención en estos trabajosson los procesos electromagnéticos del motor asíncrono durante su arranque, inversiónde giro y parada. A estos procesos los denominados procesos o regímenes de carácterdinámico.Estos regímenes son de alta complejidad, motivo por el cual, en la actualidad se continúanlos estudios concernientes a estos temas, y es el motivo de nuestros trabajos deinvestigación y que da origen a este libro.Debido a la gran demanda de motores asíncronos para su utilización en los diferentescampos de la industria, surge la necesidad de analizar los fenómenos físicos que setienen durante el funcionamiento de estas máquinas eléctricas.La descripción analítica de los procesos físicos en cualquier dispositivo diseñado por latecnología ingenieril se denomina MODELO MATEMÁTICO. Para las máquinas eléctricasy transformadores, el modelo matemático se puede construir por medio de dos métodos:• Método de la teoría de campo. La base de este método son las ecuaciones
diferenciales sobre la base de las ecuaciones diferenciales particulares de Maxwell osus modificaciones.
• Método de la teoría de circuitos; el cual está sobre la base de ecuaciones algebraicaso ecuaciones diferenciales simples.
Las ecuaciones algebraicas describen sólo los regímenes estables (estacionarios, estáticos)de funcionamiento.En las ecuaciones de este tipo, para la máquina de corriente continua (MCC), seconsideran las magnitudes de corriente continua, para las cuales la frecuencia en funcióndel tiempo es igual a cero. Las ecuaciones algebraicas para transformadores y máquinasde corriente alterna (MCA) se escriben en forma de valores complejos de variablessenoidales.Las ecuaciones diferenciales son más universales, aunque tengan una descripción máscompleja tanto en los regímenes de funcionamiento estable como en el transitorio. Lostransitorios son también conocidos como regímenes dinámicos o inestables, los cualesestán rela-cionados con los procesos físicos que suceden en los transformadores y

12
Miguel Ocharán P.a
máquinas eléctricas. Las ecuaciones diferenciales simples se escriben para valoresinstantáneos de las variables. Las curvas de éstas variables en función del tiempo sontambién llamadas oscilogramas.Las ecuaciones de circuitos de devanados se escriben sobre la base de las leyes deKirchoff y de inducción electromagnética. A la malla de cada fase le corresponde suecuación y junto con la ecuación diferencial de balance de momentos (ecuación delmovimiento del rotor) se da forma al modelo matemático del dispositivo, que viene aser un sistema de ecuaciones diferenciales. El método de solución más racional, efectivoy porque no decir único, se obtiene gracias al empleo de Máquinas Análogas ElectrónicasMAE y de PC¢S.

13
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 1
LAS MAQUINAS ELECTRICAS
1.1 DEFINICIONES FUNDAMENTALES
Los dispositivos que realizan la transformación de la energía al producir movimientosmecánicos a partir de la dotación de energía eléctrica en sus bornes o al producirenergía eléctrica a partir de imprimirle movimiento mecánico al dispositivo se llaman«máquinas eléctricas». En la actualidad una importante parte de la energía reservadaen la naturaleza en diversas formas: química, nuclear, mareomotríz, eólica y solar,es transformada en energía eléctrica. La característica fundamental de este procesode transformación consiste en que la energía eléctrica puede transmitirse a grandesdistancias a bajo costo, con alta seguridad y fiabilidad, distribuirse entre los usuariosy de nuevo convertirse en energía en sus diversas formas: mecánica – sistemasde transporte, industriales, etc.- calorífica, química, radiante – equipos deiluminación artificial-, o en el impulso fundamental de los sistemas electrónicosque conforman la mayor parte de dispositivos que la vida moderna ofrece: sistemasde comunicación, como la televisión o la radiofonía, sistemas de computo e infinidadde aplicaciones en el uso doméstico. No obstante, todos los procesos detransformación contienen implícitamente sus propios inconvenientes tecnológicosy económicos, requiriéndose procesos de transformación intermedios ocompuestos, donde la transformación de muchos tipos de energía natural enmecánica y luego a eléctrica juega un papel primordial.
La maquina eléctrica destinada a transformar la energía mecánica en eléctrica sellama comúnmente «generador eléctrico». La maquina eléctrica destinada a latransformación de energía eléctrica en mecánica se llama «motor eléctrico».

14
Miguel Ocharán P.a
Las máquinas eléctricas poseen el principio de reversibilidad de la transformación.Es decir, que en toda máquina eléctrica se puede realizar la transformaciónelectromecánica en los dos sentidos posibles. Si se suministra energía mecánica aleje o árbol de una máquina eléctrica, ésta funcionará en régimen de generador deenergía eléctrica. Si a la máquina se le suministra energía eléctrica en los bornes,su órgano móvil, denominado comúnmente árbol, realizará trabajo mecánico,generalmente de rotación.
La máquina eléctrica es un sistema electromagnético que consta de circuitosmagnéticos y eléctricos interrelacionados mutuamente.
El circuito magnético asociado a cada máquina eléctrica está constituido por loscircuitos magnéticos fijo y móvil. El circuito magnético fijo es el entrehierro oseparación entre la parte estática (estator) y la parte móvil rotativa (rotor) de lamáquina, y el conjunto de espiras que conforman el devanado estatórico. El circuitomagnético móvil esta constituido por el devanado asociado a la parte móvil ogiratoria de la máquina. Los circuitos magnéticos pueden desplazarse uno conrespecto al otro.
En las máquinas eléctricas la transformación electromecánica de la energía estábasada en el fenómeno de la inducción electromagnética y está asociada a lasfuerzas electromotrices (f.e.m.) inducidas, producto de la variación – normalmenteperiódica- del campo magnético. Esta variación periódica del campo magnéticotiene lugar durante el desplazamiento mecánico de los devanados o de los elementoscomponentes del circuito magnético móvil.
Las máquinas eléctricas, cuyo principio de funcionamiento está basado en la leyde inducción electromagnética se llaman máquinas de inducción. Un caso particularde la aplicación de este fenómeno es el llamado transformador eléctrico. Este tipode dispositivo esta destinado a transformar la energía eléctrica con parámetros deunos valores dados (corriente, voltaje, frecuencia) en energía eléctrica conparámetros de otros valores, los mismos que guardan proporcionalidad al numerode espiras de los devanados componentes de los circuitos magnéticos asociados.Este tipo de convertidor inductivo es el más sencillo y de uso más difundido y pormedio de él la corriente alterna de una tensión se transforma en corriente alternade otro voltaje. En ésta máquina sus devanados y el circuito magnético sonmutuamente inmóviles, y el proceso de la variación periódica del campo magnético,por el cual se inducen las fuerzas electromotrices en los devanados, se realizaeléctricamente.

15
Máquinas Asincronas - Estados Estable y Dinámico
Por otra parte, los convertidores inductivos de energía eléctrica que poseenelementos móviles de llaman máquinas eléctricas rotatorias. Por ello, dado que suprincipio de funcionamiento y construcción en esencia no difieren de las maquinaseléctricas descritas y teniendo en cuenta el extenso significado del termino«maquina», se debe considerar que los transformadores y los convertidoreselectromecánicos como una variedad especial de maquinas eléctricas de inducción.
Las máquinas eléctricas como convertidores de energía son los elementos másimportantes de cualquier instalación energética o industrial. En la actualidad seusan cada vez más asociadas a sistemas de mando automático y regulación. Lasmáquinas eléctricas pueden operar con una red de corriente alterna o de corrientecontinua. En correspondencia con esto se dividen en máquinas eléctricas decorriente alterna y máquinas eléctricas de corriente continua.
1.2 CLASIFICACION DE LAS MAQUINAS ELECTRICAS
1.2.1 Clasificación GeneralExisten muchas formas de clasificar las máquinas eléctricas, sea por su tipo de
desplazamiento: estáticas o rotatorias, por su potencia: de gran potencia, medianapotencia o micro máquinas, por el tipo de suministro eléctrico asociado: corrientecontinua o corriente alterna, trifásicas o monofásicas, etc. Elegiremos la clasificacióngeneral más sencilla asociada a la destinación funcional de las máquinas eléctricas.
Clasificación de las máquinas eléctricas según su destinación funcional
Denominación Destinación funcional
Transformador Transformación de la corriente alterna de una tensión en corriente alterna de otra tensión
Convertidor de corriente alterna en continua (rectificador)
Transformación de la corriente alterna en continua (o transformación inversa)
Convertidor estático de la corriente continua
Transformación de la corriente continua de una tensión en corriente continua de otra tensión
Máquina eléctrica corriente alterna Transformación de la energía eléctrica de la corriente alterna en energía mecánica (o transformación inversa)
Máquina eléctrica de corriente continua (de válvulas o de colector)
Transformación de la energía eléctrica de corriente continua en energía mecánica (o transformación inversa)
Convertidor electromecánico de corriente alterna (o máquina eléctrica de doble alimentación)
Transformación de la energía eléctrica de corriente alterna de frecuencia f1 en energía eléctrica de corriente alterna de frecuencia f2 = f1 y en energía mecánica (o transformación en cualquier otro sentido)

16
Miguel Ocharán P.a
1.2.2 Clasificación de las Máquinas Eléctricas de Inducción RotatoriasPara este tipo particular de máquinas eléctricas la clasificación obedece al tipo
de desplazamiento y por la forma de sus partes móviles.
Una máquina eléctrica inductiva rotatoria está constituida por dos partes principales:la parte inmóvil y la parte móvil. La parte inmóvil, conocida como el estator,consta del circuito magnético, de uno o varios devanados y de las piezasconstructivas, dentro de las que se incluye la carcaza, mediante los cuales a todoslos elementos del estator se les otorga una determinada posición en el espacio.
La parte móvil está constituida por el circuito magnético asociado a dicha parte,uno o varios devanados y también por las piezas constructivas mediante las cualesse asegura el desplazamiento del rotor o parte móvil respecto al estator o parteinmóvil en determinada dirección.
Los devanados móviles e inmóviles reciben alimentación eléctrica a las cualesellos están conectados directamente o a través de transformadores de frecuencia.Para el acoplamiento del suministro de energía con los devanados móviles seutilizan contactos corredizos. El rotor o parte móvil de la maquina poseegeneralmente un solo grado de libertad de desplazamiento (el desplazamiento enlos demás sentidos posibles se excluye con ayuda de las piezas de apoyo (bujes,cojinetes, rodamientos, etc.) de uno u otro tipo.
Las maquinas más utilizadas son aquellas en las cuales la parte móvil gira variandosu posición angular respecto a la parte inmóvil o estator. Estas máquinas se llamangiratorias o rotatorias
Generalmente se emplean las máquinas giratorias en las cuales el rotor cilíndricoestá dispuesto dentro del estator, que tiene la forma de un cilindro hueco, estasmaquinas se llaman maquinas giratorias cilíndricas, o simplemente, maquinasgiratorias.
Existen una serie de casos particulares, que describiremos a continuación:a) Máquina con rotor exterior: con el fin de aumentar el momento de inercia de
las partes giratorias, el rotor, que tiene la forma de un anillo, se dispone porfuera del estator.
b) Máquinas giratorias frontales: es el tipo de maquina giratoria en la cual tanto elestator como el rotor tienen la forma de discos dirigidos uno hacia el otro porlas superficies planas frontales.

17
Máquinas Asincronas - Estados Estable y Dinámico
c) Máquinas lineales (planas o cilíndricas): son máquinas eléctricas de uso muyrestringido en las cuales la parte móvil se desplaza progresivamente variandosu posición lineal respecto al estator.En la máquina plana lineal los circuitos magnéticos móvil e inmóvil tienen laforma de paralelepípedos dirigidos uno hacia el otro por sus caras planas. Enla máquina cilíndrica lineal el circuito magnético móvil de forma cilíndrica sedesplaza en dirección axial por dentro del circuito magnético inmóvil de formageneralmente anular.
d) Máquinas eléctricas oscilatorias: son máquinas giratorias o lineales en las cualesla parte móvil ejecuta movimientos oscilatorios. Una aplicación típica de lamáquina lineal oscilatoria es en los relojes eléctricos.
e) Los electro moto reductores, sobre la base del convertidor mecánico el cual esanálogo al del transformador eléctrico de frecuencia que acopla la maquinaelectrica con la red. Tal dispositivo a menudo se intercala en la máquina deinducción formando con esta una sola máquina llamada comúnmente motoreductor. El convertidor mecánico más utilizado es el reductor de engranajes oel de platos (multiplicador) que sirve para reducir o aumentar la frecuencia derotación del árbol del dispositivo moto reductor.
Para transformar el movimiento giratorio en movimiento de avance se puede usarla transmisión por tornillo sin fin, el engranaje de cremallera o la transmisión porfricción.Para transformar el balanceo o las oscilaciones en movimiento giratorio o de avancese usan diversos tipos de mecanismos de trinquete.
1.3 NORMAS
1.3.1 AlcancesEn esta sección resumiremos la primera parte de la publicación MG 2-2001, de
la National Electrical Manufacturers Association, relativa a las principales normasde selección, instalación y uso de las máquinas eléctricas rotativas, de modo talque se prevea en forma práctica la seguridad de las personas y equipos.La publicación excluye los siguientes tipos de dispositivos
a. Máquinas de Soldar
b. El impulsores, frenos dinámicos, y las máquinas del tipo absorción.
c. Las plantas eléctricas de alumbrado agrícola remotas o aisladas.
d. El generador de velocidad variable para vagones de pasajeros del ferrocarril.

18
Miguel Ocharán P.a
e. Los motores de vehículos, alternadores de vehículos, generadores, y los gruposelectrógenos motores para uso en locomotoras, ferrocarril y vehículos.
f. Los automotores, los generadores de vehículos y grupos electrógenos.
g. Los grupos de motores, de generadores, de excitadores, y de generador motoro del excitador, de uso en transporte aéreo
h. Los motores de juguete y los motores sincrónicos pequeños del tipo generalmenteusado en muebles domésticos y cronómetros.
i. Las características específicas adicionales requeridas en máquinas para el usoen posiciones arriesgadas (clasificado). Tales posiciones podrían estar en zonasexplosivas o en áreas definidos en el Código Eléctrico Nacional (ANSI/NFPA70), los Artículos 500 a través de 503.
j. Las máquinas construidas para las especificaciones militares teniendo requisitosque están en conflicto con o pasan sobre la disposición de lo previsto en lapublicación.
k. Las partes de la máquina destindasa para la instalación de cercos herméticamentesellados.
l. Los generadores de polos no salientes y sus excitadores.
m. Los generadores mayores que 10,000 kVA, y sus excitadores conducidos porturbina hidráulica, incluyendo las unidades de generación reversible.
n. Los condensadores síncronos, los convertidores de frecuencia, y losconvertidores de fase.
Dado que cualquier máquina puede ser instalada o manejada de tal modo que lospeligros pueden ocurrir, la conformidad con la publicación por sí misma no asegurauna instalación segura. Sin embargo, cuando una máquina satisface los requisitosexpuestos en la publicación y está seleccionada correctamente con relación a lacarga conectada y ambiente, y es instalada de conformidad con lo previsto en loscódigos nacionales y adecuadas prácticas locales, los peligros para las personas yla propiedad se acortarán.
1.3.2. Entidades y Normas tomadas como referencias.En la publicación se hace referencia a las siguientes entidades y normas:
American National Standards Institute (ANSI)11 West 42nd streetNewYork, NY 10036

19
Máquinas Asincronas - Estados Estable y Dinámico
ANSI/ASME B15.1-2000 Safety Standard for Mechanical Power TransmissionApparatus
American Society for Testing and Materials (ASTM)1916 Race StreetPhiladelphia, PA 19103ASTM D149-81 Test Method for Dielectric Breakdown Voltage and DielectricStrength of Solid Electrical Insulating Materials at Commercial Power Frequencies
International Electrotechnical Commission (IEC)1
3Rue de Varembé, CP 131, CH-1211Geneva 20, SwitzerlandIEC 60034 (Series) Rotating Electrical Machines
National Electrical Manufacturers Association (NEMA)1300 North 17th Street, Suite 1847Rosslyn, VA 22209NEMA MG 1-1998 Motors and GeneratorsNEMA MG 10-2001 Energy Management Guide for Selection and Use ofPolyphase MotorsNEMA Application Guide for AC Adjustable Speed Drive Systems
National Fire Protection Association (NFPA)Batterymarch ParkQuincy, MA 02269ANSI/NFPA 70-2002 National Electrical Code
Underwriters Laboratories, Inc. (UL)333 Pfingsten RoadNorthbrook, IL 60062ANSI/UL 674-1994 Electric Motors and Generators for Use in HazardousLocations, Class I Groups C and D, Class II Groups E, F, and G
1.3.3.GeneralidadesLa construcción de máquinas rotativas por si mismas no aseguran seguridad
en su uso. Hay una gran necesidad de establecer medidas preventivas en laselección, instalación, y uso de máquinas, ya que existen medidas preventivas ensu diseño y la manufactura. Las siguientes recomendaciones son generalmenteaplicables pero pueden haber situaciones donde surjan conflictos con otras medidasde seguridad o con los requisitos operacionales, en ese caso se necesitará que

20
Miguel Ocharán P.a
estas recomendaciones sean modificadas. Donde las anteriormente citadas medidaspreventivas y después de la experiencia del usuario no son suficientes para servirde guía, el fabricante del equipo y el supervisor del fabricante de la máquina, oambos, deberán ser consultados para desarrollar más información. Esta mayorinformación deberá ser considerada por el usuario, sus asesores, u otras personasfamiliarizadas con los detalles de la aplicación compleja al hacer la decisión final.La importancia de la comunicación entre fabricante y usuario no puede sersoslayada. Las oportunidades para impedir incidentes arriesgados y limitar susconsecuencias son grandemente mejoradas cuando ambos, usuario y fabricante,están correctamente y con creces, informados con relación al uso pretendido ytodas las condiciones ambientales y operativas. Desde que tal uso pretendido ytales condiciones ambientales y operativas están bajo el control exclusivo del usuario,él es quien tiene el conocimiento más completo del uso pretendido y las condicionesambientales y operativas, por lo que deberá hacer una selección apropiada ydeberá instalar máquinas que optimizarán la seguridad en su uso. La publicaciónpretende ayudar al usuario en la selección, la instalación y el uso de máquinaseléctricas.
1.3.4 Protección Ambiental y Métodos de EnfriamientoLa ventilación y otras consideraciones del diseño de máquinas frecuentemente
requieren aberturas en las partes exteriores en las zonas vecinas de las partes demetal no aisladas, disipadores de calor o del movimiento de partes mecánicas dela máquina. El uso de máquinas cerradas de uso general están definidos en lassecciones 4.1 y 4.2 de la publicación. Los detalles de protección internacional (IP)y los métodos de enfriamiento internacional (IC) conforman las IEC Standards.Para mayor información, puede verse NEMA Standards Publication MG1, en laParte 5 (Código IP) y en Parte 6 (Código IC).a) Abiertas (1P00, IC01)b) A prueba de goteo (IP12, IC01)c) A prueba de chorreo (IP13, IC01)d) Semi-cerrada (IC01)e) Cerradaf) A prueba de goteo (IC01)g) Apertura y ventilación independiente (IC06)h) Ventilada por ductoi) Protegida contra interperismoj) Máquina Tipo I (IC01)

21
Máquinas Asincronas - Estados Estable y Dinámico
k) Máquina Tipo II (IC01)l) Completamente cerrada.m) Completamente cerrada y no ventilada (IC410)n) Completamente cerrada y enfriada por ventiladoro) Completamente cerrada, protegida y enfriada por ventilador (IC411)p) Completamente cerrada ventilada por ducto (IP44)q) Completamente cerrada ventilada por agua (IP54)r) A prueba de agua (IP55)s) Completamente cerrada refrigerada por agua-aire (IP54)t) Completamente cerrada refrigerada por aire-aire (IP54)u) Completamente cerrada refrigerada por aire superficial (IP54, IC417))v) A prueba de explosiónw) Prueba de Ignición y polvo

22
Miguel Ocharán P.a

23
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 2
GENERALIDADES ACERCA DE LOS PROCESOS DETRANSFORMACION DE ENERGIA EN LAS
MAQUINAS ELECTRICAS
2.1 PROCESOS ELECTROMECANICOS Y ELECTROMAGNETICOS
Como sabemos, el circuito electromagnético de una maquina electrica consta dedos elementos principales: el estator o parte inmóvil y el rotor o parte móvil,giratoria.El núcleo del estator está fijamente anclado a la carcaza de la máquina y ésta a suvez a la cimentación del dispositivo. El núcleo del rotor, colocado en el eje o árbol,gira junto con éste sobre los apoyos (cojinetes, bujes, etc.) manteniendo una posicióncoaxial con respecto al estator. Las ranuras distribuidas diametralmente sobre lasuperficie cilíndrica del núcleo del rotor alojan el devanado rotórico compuestopor una bobina con número de espiras w1; en las ranuras del circuito magnéticodel estator se aloja el devanado 2, constituido por una bobina con un número deespiras w2.El material empleado para la fabricación de los núcleos tanto del rotor como delestator es de silicio, en forma de chapas anulares, dicho material que posee unaelevada permeabilidad magnética y que permite mantener intensificar la relaciónmagnética existente entre los circuitos magnéticos del rotor y del estator. Con elmismo propósito, esto es, de intensificar o mantener en elevados valores la relaciónmagnética entre los circuitos magnéticos, las bobinas se colocan en las ranuras delos circuitos magnéticos y no en su superficie exterior. Siempre con el mismocriterio, el entrehierro entre el estator y el rotor, se elige con el valor mínimoadmisible, ello permite obtener una resistencia bastante pequeña del entrehierroen el circuito magnético.

24
Miguel Ocharán P.a
Por medio del eje o árbol, el rotor se acopla con otra maquina y con ésta realiza unintercambio de energía mecánica (entrega emergía en el régimen de rotor y recibeenergía en el régimen de generador). El devanado del estator y el devanado delrotor están conectados a redes eléctricas con tensiones u2 y u1.
En el régimen de motor, la maquina recibe de éstas redes (o de una de ellas)energía electrica; en el régimen de generador, la máquina genera energía electricapara estas redes.
En la máquina, la transformación electromecánica de la energía está ligada conlas f.e.m. que se inducen en los devanados, a causa del cambio de su posiciónmutua en el espacio. Supongamos que en el devanado 2 (del estator) se tienecorriente continua i2 = constante, y que el devanado 1 está desconectado, o sea i1= 0. En este caso se forma un campo magnético fijo cuyo polo norte N se sitúa enla parte inferior del circuito magnético y el polo sur S se sitúa en la parte superior.
Considerando que la permeabilidad magnética del acero de los circuitos magnéticosdel estator y del rotor µα ac es infinitamente grande en comparación con lapermeabilidad magnética del entrehierro igual a µ0 (µα ac >> µ0), se puede despreciarla diferencia de potenciales magnéticos en el circuito magnético y escribiendo laley de la corriente total para cualquier circuito que abarca la corriente i2w2 de labobina 2, tenemos la siguiente ecuación:
∫ ω=µ
δ= 22
0
2l i
2.BdlH (2.1)
desde la cual podemos encontrar el valor de la inducción del campo magnético deldevanado 2 en el entrehierro.
δωµ
=2i
B 2202 (2.2)
donde δ es el espesor del entrehierro.
El flujo magnético total Ψ12m de este campo en el devanado 1 depende del ánguloγ. Dicho ángulo caracteriza la posición del devanado rotórico 1 con respecto aldevanado estatórico 2. El flujo concatenado tiene su valor máximo positivo cuandoγ = 0.

25
Máquinas Asincronas - Estados Estable y Dinámico
Ψ12m = B2τlw1, (2.3)
donde «l» es la longitud del circuito magnético en dirección axial; τ = πR es lalongitud del paso polar.
De manera análoga varia la inductancia mutua existente entre los devanados L12= Ψ12/i2:
⎟⎠⎞
⎜⎝⎛
πγ
−=21LL m1212 para 0<γ<π (2.4)
⎟⎠⎞
⎜⎝⎛
πγ
−−=23LL m1212 para π<γ<2π (2.5)
donde δ
τωωµ=
2l
L 210m12 es la máxima inductancia mutua entre los devanados.
Al girar el rotor con una velocidad angular Ω el ángulo γ = Ωt crece linealmente ycomo resultado de su variación en el devanado 1 se induce la f.e.m.
γΩ−=−=
Ψ−=
ddL
idt
dLi
dtd
e 122
122
121 (2.6)
dicha f.e.m. inducida se llama f.e.m. de rotación.
Puede apreciarse que la f.e.m. de rotación es directamente proporcional a lacorriente, a la velocidad angular y a la derivada de la inductancia mutua conrespecto al ángulo de giro del rotor. Se deduce que
Ωπ
= 2m121 iL2e para 0<γ<π (2.7)
Ωπ
−= 2m121 iL2e si π<γ<2π (2.8)

26
Miguel Ocharán P.a
Aquí el signo (+) significa, que el sentido de la f.e.m. coincide con el sentidopositivo de la corriente en el devanado 1; el signo (-) significa que es contrario. Deesta, forma en la máquina eléctrica elemental cuando i2 es constante, en el devanado1 se induce una f.e.m. variable rectangular. El periodo de variación del flujoconcatenado de la inductancia mutua y de la f.e.m. corresponde al giro del rotor alángulo 2π. Éste es igual a T =2π/Ω, donde la frecuencia de su variación es
πΩ
=2
f (2.9)
Empleando las fórmulas desarrolladas, la f.e.m. de rotación se puede expresar enfunción de la inducción B2del campo magnético en el entrehierro de la longituddel circuito magnético en la dirección axial y de la velocidad v.
e1 = 2B2lvw1 para 0 < γ < π, (2.10)
v = RΩ es la velocidad lineal periférica en el centro del entrehierro. Por estarazón, la dirección de la f.e.m. e1 se puede determinar empleando en esencia la«ley de Lenz» sino también mediante «la regla de la mano derecha». Desde luegoambos procedimientos proporcionaran el mismo resultado.
El devanado 1 posee la resistencia interior ohnmica R1, al cerrar el devanado (unirsus terminales)dicha resistencia interna ohnmica se añade a la resistencia de cargaRcae, entonces en el circuito eléctrico formado surgirá la corriente resultante:
1car
11 RR
ei
+= (2.11)
la cual variara con la misma frecuencia que la f.e.m., es decir, con la frecuencia f.
Con esto, en el devanado 1 se generara la potencia electrica:
( ) 111112
2111 iiRud
dLiiie +=
γΩ−= (2.12)
Una parte de esta potencia R1i12 se disipa en forma de calor en el devanado 1; la
parte restante p1 = u1i1 =Rcari12 será entregada a la carga. La tensión u1 =Rcari1 en

27
Máquinas Asincronas - Estados Estable y Dinámico
los bornes de salida del devanado 1, que coincide con la tensión de carga, tambiénvaria con la frecuencia f. Con la condición asumida i2 = constante., el devanado 2se alimenta de la fuente de corriente continua con la tensión u2 =i2R2.
La potencia que se consume en el devanado 2, p2 = u2i2 no es parte de latransformación electromecánica del dispositivo y completamente se disipa en formade calor.
Como resultado de la interacción del campo magnético de la corriente i2 con lacorriente i1, en el rotor se produce el momento electromagnético M. Ladeterminación del momento M se efectúa a partir de igualar el trabajo efectuadoal girar el rotor en un pequeño ángulo dγ con la variación de la energía del campomagnético del sistema dW. Dicha variación de la energía del campo magnético seproduce debido a la variación de la inductancia mutua dL12cuando i1 = constante.e i2 = constante., es decir,
M dγ = dW = i1i2dL12, (2.13)
de donde
γ=
ddL
iiM 1221 (2.14)
De acuerdo al incremento del ángulo dγ, es decir si éste ha sido tomado en ladirección del giro entonces el momento será positivo en este sentido y negativo encaso contrario. En el régimen de generador el momento M < 0.
El momento electromagnético puede también expresarse mediante la inducciónB2 del campo magnético en el entrehierro.
M = 2B2li1w1R (2.15)
En el régimen de operación como generador, para determinar la dirección de lafuerza electromagnética tangencial F = 2B2li1w1 y del momento M , es necesarioemplear «la regla de la mano izquierda».
En el régimen de operación estable, cuando el rotor gira son una velocidad constanteΩ, el momento electromagnético M debe estar compensado con un momentoexterior Mext

28
Miguel Ocharán P.a
γ−=−=
ddL
iiMM 1221ext (2.16)
En este caso, a través del árbol al rotor de la maquina se le aplicará una potenciamecánica.
γΩ−=Ω
ddL
iiM 1221ext (2.17)
la cual se transformara en potencia electrica e1i1,.
La máquina eléctrica más sencilla, realiza en un solo sentido la transformaciónelectromecánica de la energía (en el caso dado en el régimen de generador).Esamisma máquina puede funcionar como motor, transformando la energía eléctricaen mecánica. Para realizar este régimen hay que conectar el devanado 1 a unared de tensión alterna u1, la cual varia con la frecuencia f. Ello es necesario paraque la corriente alterna i1 siempre esté dirigida en oposición a la f.e.m. e1.
En conclusión la máquina eléctrica es reversible; es decir, está puede funcionarcomo generador, o motor.
2.2 CAMPO MAGNETICO CON VARIACION PERIODICA
2.2.1. Campos con variación periódica el tiempoDe lo visto hasta este momento, podemos concluir que la condición necesaria
e indispensable aunque no suficiente para realizar en la máquina la transformaciónelectromecánica es la variación de las inductancias propias o simplementeinductancias e inductancias mutuas de los devanados cuando gira el rotor.
Para obtener la transformación electromecánica unidireccional es necesarioademás que tanto las corrientes de estator y del rotor varíen de tal manera que nosolo los valores instantáneos, sino por sobre todo, los valores medios del momentoelectromagnético y la potencia mecánica sean bastante grandes.
Por consideraciones técnicas y constructivas es poco probable obtener camposmagnéticos, inductancias propias e inductancias mutuas y flujos magnéticosconcatenados que sean funciones monótonamente crecientes de las corrientes ydel ángulo de giro del rotor. Es posible determinar que dichos parámetros varíanperiódicamente con el ángulo del rotor, por la naturaleza geométrica de la máquina

29
Máquinas Asincronas - Estados Estable y Dinámico
y en ese caso las derivadas de dichas funciones variaran periódicamente. Enconsecuencia, es necesario obterner la variación periódica de los parámetros(inductancias) de las máquinas en función del ángulo de giro del rotor y es necesarioque al circular las corrientes de los devanados, al menos en uno de ellos, formencampos periódicamente variables en el espacio, en particular en la direccióntangencial a lo largo del entrehierro.
Por ello, en términos constructivos, es necesario dotar a las máquinas de devanadosy circuitos magnéticos que permitan obtener campos periódicos.
Existen una diversidad de combinaciones para tal propósito, nos limitaremos amencionar cuatro de las más comunes:a) Devanado Cilíndrico (de tambor) de polos de signos contrarios (Máquina
Convencional)b) Devanado Toroidal de polos de signos contrariosc) Devanado Anular (anillo) y circuito magnético de garrasd) Devanado Anular de polos del mismo signo y circuito magnético dentadoCada una de dichas combinaciones ofrecen sus propias ventajas y desventajas,las mismas que motivan sus aplicaciones específicas.
2.2.2.Ecuaciones y características del campo electromagnético en lasmáquinas eléctricas
En una máquina eléctrica de tipo inductivo los procesos de transformación dela energía están relacionados con el campo magnético, creado por la corrientes delos devanados. Fundamentalmente entonces se trata de determinar el valor de lainducción del campo magnético B generado por la distribución espacial de ladensidad de la corriente J en los devanados de la máquina. Por ello, estableceremoslas siguientes ecuaciones que dan forma al problema a resolver
La intensidad del campo magnético, que es una cantidad vectorial, puede expresarsemediante la primera ecuación de Maxwell.
rot H= J (2.18)
Por otro lado, podemos explicitar la relación entre la inducción y la intensidad delcampo magnético
B = µa H....(2.19)
donde µa la permeabilidad magnética absoluta del medio,

30
Miguel Ocharán P.a
La ecuación de continuidad nos permite establecer las condiciones de contornodel problema
div B = 0....(2.20)
y nos indica que las líneas del campo magnético representan lazos cerrados.
Asumiremos, como es el caso mayoritario, que el vector de densidad de corrienteJ esta uniformemente distribuido por la sección del conductor S y está dirigida a lolargo del eje del conductor hacia el lado que fluye la corriente.
J = H S...(2.21)
Al estar las espiras de los devanados dispuestas en las ranuras de los circuitosmagnéticos, en consecuencia el campo magnético está presente en el volumenocupado por los circuitos magnéticos del estator y del rotor, en el entrehierro entreel rotor y el estator y en el espacio que rodea las partes frontales de los devanados.De igual modo también es posible que se encuentre en las partes constructivascon alta resistencia magnética y conductoras de la maquina obviamente con muypoca intensidad.
Para calcular el campo magnético, a las ecuaciones lineales de campo se lesdebe añadir las ecuaciones de las superficies que separan los diversos medios. Esnecesario precisar que los diversos medios o elementos presentes en el volumende control presentan valores desiguales en sus permeabilidades magnéticas relativasy por consiguiente las ecuaciones de la superficie que limitan los circuitosmagnéticos, los valores limites (condiciones de borde) y las componentestangenciales y normales de los vectores del campo magnético en las superficiesque separan los diversos medios, responden a diversos valores.
En los casos cuando la permeabilidad magnética del acero de los circuitosmagnéticos µ r .a c no se pueda considerar infinitamente grande, en comparacióncon la permeabilidad magnética relativa de las zonas llenas de aire, de materialesaislantes y de espiras, es necesario tener en cuenta las propiedades magnéticasno lineales de los materiales ferromagnéticos que se caracterizan por la variaciónde su permeabilidad magnética relativa en función de la intensidad del campomagnético.(características de magnetización de cada material).
Si bien es cierto el sistema de ecuaciones planteado y las condiciones anotadasdescriben plenamente las características para la determinación del campo

31
Máquinas Asincronas - Estados Estable y Dinámico
magnético en la máquina, como es de entenderse su solución analítica por losmétodos de la Teoría de Campos resulta sumamente difícil. Fundamentalmentepor el alto grado de complejidad en la expresión matemática que, por ejemplo, lassuperficies involucradas en el cálculo, por la variedad de valores que lascaracterísticas no lineales de los medios ferromagnéticos, y las condicionesespaciales y de movimientos que los circuitos magnéticos y materiales, ofrecen.
Por ello, se impone efectuar una serie de suposiciones o asunciones, de modo talque se facilite el cálculo, sin gravar considerablemente los resultados del mismo.
a) Se asume el carácter periódico del campo magnético de la máquina, lo queesta relacionado o sustentado en la periodicidad de la distribución de lascorrientes en los devanados
b) Se supone que la permeabilidad magnética de los circuitos magnéticosferromagnéticos es infinitamente grande en comparación con la permeabilidadmagnética del vacío.
c) Se asume que se puede utilizar el método de superposición de campos ydeterminar el campo magnético de la máquina como la suma de los campos decada uno de los devanados .y determinar a su vez, el campo del devanadocomo la suma de los campos creados por las corrientes en los sistemasperiódicos elementales de las bobinas.
Para determinar el campo total del devanado basta con calcular el campo magnéticode un sistema periódico de bobinas con corriente unitaria I =1, determinar loscampos de todos los sistemas periódicos, estando las corrientes instantáneas enellos dadas, aumentando proporcionalmente el campo creado por la corrienteunitaria y sumar estos campos teniendo en cuenta la disposición de los mismos enel espacio.
De esta manera: el problema del calculo del campo magnético se reduce a unproblema simple de determinación del campo del sistema periódico de bobinassiendo infinitamente grande la permeabilidad magnética relativa de los circuitosmagnéticos.
El campo del espacio amagnético puede ser dividido en tres campos característicos:a) El campo en la zona de entrehierrob) El campo en la zona de las ranuras con corrientes.c) El campo en la zona de las partes frontales.

32
Miguel Ocharán P.a
2.2.3 Campo en el entrehierroEn el cálculo de la máquina lo más importante es calcular el valor de la intensidad
y densidad de campo en la zona del entrehierro entre los circuitos magnéticos. Laenergía de esta porción del campo total supera considerablemente la energía delos otros campos componentes, ello es la razón por la que se centra comúnmentelos esfuerzos en la determinación de este campo.
Este campo posee las siguientes particularidades:a) Es un campo plano paralelo (o bidimensional) al eje axial de la máquina; como
veremos más adelante, en el desarrollo del Método de Elementos Finitos (MEF),sección xxx, esta particularidad favorece notoriamente la posibilidad de cálculo.
b) Se denomina de inducción mutua; dada su ubicación espacial y su naturalezasimétrica bidimensional, alberga las interrelaciones entre las inductancias propiasy mutuas y el campo del entrehierro propiamente dicho.
c) Para el cálculo de este campo es posible usar la noción de potencial magnéticoescalar. Ello también contribuye a la facilidad del cálculo por el MEF.
En estudios mas detallados el campo de dispersión de ranura se representa enforma de la suma del campo de dispersión en la ranura y el campo de dispersiónpor las cabezas de los dientes, A la zona del campo de las partes frontales perteneceel entrehierro amagnético en torno a las partes frontales de las bobinas fuera delos limites de los circuitos magnéticos.
2.2.4 Campo Magnético de Inducción MutuaDe acuerdo a lo visto en el acápite anterior, hecha las suposiciones mencionadas
el campo de inducción mutua del devanado polifásico es plano - paralelo(bidimensional) y su energía está concentrada en la zona del entrehierro amágnetico,donde no existen corrientes distribuidas. La intensidad H de este campo se puedeexpresar como el gradiente del potencial magnético escalar ϕm = ϕ
H = - grad ϕ...(2.22)
A partir de esta ecuación se deduce inmediatamente, por reemplazo, la ecuaciónde Laplace:
∇ 2 ϕ = ∂ 2 ϕ....(2.23)
Para determinar ϕ en cualquier punto de la zona del entrehierro es necesariotener en cuenta las condiciones límites en las superficies ferromagnéticas quecorresponden a las corrientes instantáneas en las fases de los devanados. Las

33
Máquinas Asincronas - Estados Estable y Dinámico
condiciones limites se prefijan en forma de distribución del potencial ϕ en lassuperficies.
Definida la distribución del potencial en las superficies limites, el paso siguiente escalcular las componentes de la intensidad de campo en la zona de entrehierro.
2.2.5 Campo Fundamental y Campo de DispersiónEl campo magnético en la máquina eléctrica con dos devanados polifásicos, se
encuentra conformado por dos componentes, uno está situado en el estator y elotro, en el rotor.
Si consideramos la permeabilidad magnética relativa de los circuitos magnéticosdel estator y el rotor infinitamente grande, se puede representar el campo magnéticode esta maquina en el régimen estacionario en forma de la suma de dos campos:el fundamental y el de dispersión.
a) El campo magnético fundamental corresponde al armónico fundamental dedistribución de la componente radial de la inducción en el entrehierro.Desempeña el papel principal en el proceso de transformación de la energía.Para ∞=rµ el campo fundamental puede ser imaginado como compuestode dos campos mutuamente inmóviles: el campo fundamental del estator, y elcampo fundamental del rotor. Lógicamente la distribución espacial de la inducciónmagnética de cada uno do estos campos en el entrehierro contiene sólo elarmónico fundamental. A su vez el campo fundamental del estator (rotor) puedeser representado como la suma do los campos fundamentales creados porcada una de las fases del devanado del estator (rotor).
b) El campo magnético de dispersión es el campo formado por tales sistemas decorrientes en los devanados del estator y el rotor, que no son contribuyen alcomponente armónico fundamental del campo. El campo de dispersión se formacuando los armónicos fundamentales de la inducción de los campos del estatory el rotor están mutuamente compensados.
El flujo concatenado total del devanado polifásico puede ser representado en formade la suma del flujo concatenado principal y el flujo concatenado de dispersión.El flujo concatenado principal del devanado está condicionado por el campo principal,creado por él, que se cierra a través del entrehierro y que está concatenado conambos devanados de la máquina. El flujo concatenado de dispersión estácondicionado por la parte del campo magnético de dispersión que está concatenadocon el devanado dado.

34
Miguel Ocharán P.a
2.2.6 Longitud Calculada Del Circuito MagnéticoSe puede demostrar que
l δ = l – nb b′b + 2δ (2.24)
Donde:l δ es la longitud calculada asociada al principio de conservación del flujol es la longitud de los paquetes de campo magnético intercalado por los canales
radialesnb es el número de canales radialesb′
b es el ancho de los canales radialesδ es la longitud del entrehierro amagnéticob′
b = c0cbδc0 = 1 con canales sólo en el estator (o solo en el rotor);c0 = 0.5 con canales en el estator y en el rotor,
Nota: cuando el entrehierro es muy pequeño (δ<<δ<<δ<<δ<<δ<< bb) la anchura calculada delcanal b′′′′′
b ≈≈≈≈≈ bb y cuando el entrehierro es muy grande ( δ>>δ>>δ>>δ>>δ>>bb ) la anchuracalculada del canal b′′′′′
b ≈≈≈≈≈ 0.
Los canales radiales son espacios destinados a aumentar la superficie deenfriamiento de la máquina.
Para simplificar los cálculos ulteriores y no distorsionar los procesos detransformación de la energía en la máquina, el campo no uniforme por la longitudde la maquina es sustituido por un campo uniforme con una inducción igual a lainducción Bm de la zona de los paquetes, donde se supone que este campo esuniforme y existe a lo largo de la longitud calculada lδδδδδ,.
2.2.7. InductanciasEn lo que corresponde a las inductancias, para determinar correctamente la
naturaleza del campo deberá analizarse el papel de las inductancias presentes enél. Daremos una rápida revista a las definiciones más relevantes sobre ellas
A) Inductancia principal de la faseLa inductancia principal de la fase se determina por el flujo concatenado principalcreado por la corriente en cada fase.
B) Inductancia mutua principal entre las fases del devanadoLa inductancia mutua principal entre las fases del devanado depende del ánguloeléctrico entro los ejes de las fases considerados del devanado dado.

35
Máquinas Asincronas - Estados Estable y Dinámico
C) Inductancia mutua principal entre la fase del devanado primario y la fase deldevanado secundarioLo mismo que en el caso anterior, esta inductancia mutua depende del cosenodel ángulo eléctrico entre los ejes de las fases consideradas de los devanadosprimario y secundario.
D) Inductancia principal del devanadoAdemás de las inductancias propias e inductancias mutuas detalladas líneasarriba, que se calculan sobre la base de las definiciones dadas, resulta necesariointroducir la noción de inductancia principal del devanado, la misma que considerala influencia de todas las fases del devanado.
E) Inductancia mutua principal entre la fase del devanado primario y el devanadosecundarioLa inductancia mutua principal entre las fases de distintos devanados se calculatambién según el flujo concatenado máximo con la fase del devanado primario,que esta creado por todas las fases del devanado secundario, es decir por elcampo giratorio del devanado secundario). Ella es igual a la relación del flujoconcatenado indicado en función de la corriente en el devanado secundario.
F) Inductancia de dispersión del devanadoConforme a la definición dada el campo de dispersión se crea si se compensanmutuamente los armónicos fundamentales de los campos magnéticos en elentrehierro debidos a las corrientes en los devanados primario y secundario.
2.3METODOS FINITOS PARA CAMPOS ELECTROMAGNETICOS
Del texto «Elementos Finitos para Ingeniería Eléctrica» de P.P. Silvester – R.L.Ferrari, extraemos los siguientes conceptos: El análisis clásico de las máquinaseléctricas precisa determinar la distribución de potencial escalar magnético en laregión del entrehierro, aquí también es válida la ecuación de Laplace en el interiorde esta región. Las condiciones de frontera se asemejan mucho a las del problemade potencial eléctrico: el potencial escalar tiene valores fijos a lo largo de lassuperficies de hierro y debe tener una derivada normal nula en los planos desimetría. El conocido principio de la energía potencial mínima precisa que ladistribución de potencial en la ranura debe ser tal que minimice la energía decampo almacenada por unidad de longitud. Este principio de energía mínima esmatemáticamente equivalente a la ecuación de Laplace, en el sentido que unadistribución de potencial que satisfaga la solución, también minimizará a la energía,e inversamente. Por consiguiente existen dos métodos prácticos alternativos pararesolver el problema de campo. Por una parte, puede buscarse directamente unasolución aproximada de la ecuación de Laplace, como se hace por ejemplo en la

36
Miguel Ocharán P.a
técnica de separación de variables o en los métodos de diferencias finitas. Porotra parte, puede crearse también una expresión aproximada para la energíaalmacenada asociada con el potencial (eléctrico o magnético), suponiendo quedicho potencial esta dado por una combinación de funciones elementalesconvenientemente escogidas, con coeficientes aún indeterminados. La minimizaciónde la energía determina entonces a los coeficientes y determina así implícitamenteuna aproximación a la distribución de potencial. Virtualmente todos los métodosde elementos finitos siguen la segunda ruta o adaptaciones de ella.
Pero el lector se preguntará sobre la pertinencia y oportunidad de este acápite.Pues bien, intentaremos resumir los conceptos y nociones básicas asociadas aluso del método de los elementos finitos y a sustentar su pertinencia en el presentelibro.
2.3.1 Definición del MétodoEn este método de análisis, una región compleja que define un continuo se
discretiza en forma geométricas simples llamadas Elementos Finitos. Laspropiedades del material y las relaciones gobernantes, son consideradas sobreesos elementos y expresadas en términos de valores desconocidos en los bordesdel elemento. Un proceso de ensamblaje, cuando se consideran debidamente lascargas y restricciones, da lugar a un conjunto de ecuaciones. La solución de esasecuaciones nos da el comportamiento aproximado del continuo.
2.3.2 Construcción del Elemento FinitoLos elementos finitos son construidos de acuerdo a su dimensión en el espacio,
para ello se establece un juego de coordenadas y de codificación propias.• Elementos unidimensionales, elementos bidimensionales, elementos
tridimensionales
2.3.3 Ecuación de LaplaceCorresponde a la ecuación
∇2U = 0
Que expresa que la segunda divergencia del potencial (magnético o escalar) esnula.
Para su aplicación y su solución generalmente se emplean Elementos Finitos dePrimer Orden.Su aplicación fundamental es para resolver problemas demagnetostática.

37
Máquinas Asincronas - Estados Estable y Dinámico
Es necesario desarrollar una técnica matricial para poder proceder a laEnsambladura de Elementos en forma correcta.
La Solución del Problema Conexo ocurre con la aplicación del Principio de Garlekino de la minimización de la energía asociada.
2.3.4 Ecuación de PoissonCorresponde a la ecuación
∇2U = -ρ
Que expresa que la segunda divergencia del potencial (magnético o escalar) esigual a la densidad superficial del flujo magnético para el caso de potencialmagnético o de la carga eléctrica para el caso del potencial eléctrico. Su aplicaciónfundamental es para problemas de campo armónicos (variables en el tiempo enforma periódica o armónica) de baja frecuencia, tal como los que se presentan enlas máquinas eléctricas.
Para su aplicación y su solución generalmente se emplean Elementos Finitos deSegundo y Tercer Orden (bidimensionales y tridimensionales)
Es necesario desarrollar una técnica matricial para poder proceder a laEnsambladura de Elementos en forma correcta.
La Solución del Problema Conexo ocurre con la aplicación del Principio de Garlekino de la minimización de la energía asociada.
Se requiere un proceso especial para la Modelación del Término Fuente, quecontiene el valor de la densidad superficial indicada.
Por otra parte se requiere un Manejo Práctico de Condiciones de Frontera. Lascondiciones de Newmann, Dirichlet y Robin., asociadas a las condiciones contornoson aplicadas para determinar los valores frontera.
2.3.5 Programación y Estructuración de datos.
Dada la complejidad de información y cantidad de datos asociados a la posiciónespacial de cada elemento finito, las ecuaciones gobernantes, las condiciones defrontera, y las soluciones parciales que los programas computacionales queresuelvan ecuaciones diferenciales de primer y segundo orden requieren se aplicanprogramas de cálculo y estructuración de datos.

38
Miguel Ocharán P.a
2.3.6 Representación de Campos ElectromagnéticosPara una adecuada solución a cada problema específico se requiere una
adecuada presentación del mismo, básicamente a una correcta representación delcampo electromagnético a estudiar. Para ello es necesario precisar y determinarla aplicación de los siguientes conceptos:• Variables Básicas: Definición de las variables conocidas y desconocidas en el
tratamiento del problema.• Relaciones de Maxwell: Relaciones entre Densidad, Intensidad de Campo y
Potenciales• Notación Fasorial Compleja: Uso adecuado para los casos armónicos• Condiciones de Frontera: Dirichlet, Newmann, Robin o una combinación de
ellas.• Ecuaciones de Potencial: Laplace y/o Poisson• Ecuación Inhomogénea de Helmholtz, esta última se refiere al comportamiento
del campo en dos direcciones transversales, su aplicación fundamental es enondas electromagnéticas con compnentes transversales (TE).
2.3.7 Elementos Triangulares para la Ecuación Escalar de HelmholtzDada la complejidad del problema se recurre al uso de un sistema de
coordenadas y de solución particular, los principales elementos son:• Coordenadas Simplex
Que es un sistema particular de coordenadas que permite la independencia dela ubicación de cada elemento con respecto a las coordenadas cartesianas.
• Interpolación de Símplices, método por el cual dichas las variables encoordenadas pueden ser calculadas por medio de ciertas reglas de interpolación.
• Elementos Triangulares PlanosSu definición y correcta aplicación.
• Matrices de Elementos Triangulares de Orden SuperiorMétodos por los cuales se utilizan procedimientos matriciales que perfilan laoptimización del cálculo del problema en términos de tiempo y memoriacomputacional.
2.3.8 Formulación de problemas de potencial con simetría de traslaciónEl texto de referencia detalla una lista de problemas tipo, que por su naturaleza
han sido agrupados para su solución general, en los siguientes tipos:• Línea coaxial de transmisión• Sistema de líneas de franjas paralelas• Pareja de líneas abiertas• Potencial escalar magnético (Circuito magnético de un motor)• Potencial vectorial magnético

39
Máquinas Asincronas - Estados Estable y Dinámico
• Ranura de armadura con conductor portador
2.3.9 Formulación de problemas de potencial con simetría axialCuando se presenta simetría de campo y se utiliza material magnético no lineal
2.3.10 Solución Numérica De Ecuaciones De Elementos FinitosSe lista los procesos y herramientas y consideraciones a ser utilizadas para tal fin:
• Descomposición Triangular• Programa de descomposición de CHOLESKI• Requerimiento de tiempo y capacidad de almacenamiento para la descomposición• Método de Almacenamiento de perfil y banda• Estructuración de matrices. Jacobiano.
2.3.11 Programa FEMMEl programa FINITE ELEMENTS METHOD MAGNETICS, creado por
David Meeker, con los Derechos Reservados de la Corporación Foster-Miller, esun programa que ha sido utilizado por el autor del presente libro, como un elementode validación de los cálculos hechos a partir del Módelo Matemático propuesto ydesarrollado en los Programas Computacionales desarrollados en proceso deinvestigación que subyacen al presente texto. Particularmente ha sido empleadoen la constatación de los valores del campo electromagnético calculado encondiciones de operación de régimen estable de las máquinas asíncronas con rotortipo jaula de ardilla.
Existen en l actualidad excelentes paquetes y programas para la aplicación de losmétodos de elementos finitos para un sin fin de problemas, en particular losasociados con flujos y uno de los más populares es el Programa ALGOR.
2.4MOMENTO ELECTROMAGNETICO DE ROTACION
Si analizamos una máquina asíncrona o síncrona de corriente alterna con unentrehierro uniforme δ , y efectuamos las siguientes asunciones o suposiciones:
a) Reemplazamos las superficies dentadas de los circuitos magnéticos superficieslisas,
b) Introducimos la noción de entrehierro equivalente δ o == k
δδ
, donde k
δ
es elcoeficiente de entrehierro, que permite tener en cuenta la influencia del carácterdentado de los circuitos magnéticos en la permeancia del entrehierro,

40
Miguel Ocharán P.a
c) Suponemos que en el estator se coloca un devanado polifásico simétrico conun número de fases m1
≥
2, y en el rotor, un devanado polifásico simétrico conun número de fases m2
≥
2, o bien un devanado monofásico de excitación (enla máquina sincrónica).
d) Asumimos que en el devanado del estator hay un sistema de corrientes desecuencia directa I1, que varían con una frecuencia angular w1 y; en el rotor,bien un sistema de corrientes de secuencia directa I2 en un devanado polifásico,que varían con la frecuencia angular w1,o bien una corriente continua I2m, enun devanado monofásico de excitación, para el cual ω2 = 0.
Encontraremos que la energía que se transforma y el momento electromagnéticode rotación medio en un período dependen del ángulo eléctrico α12, entre los ejesde los campos mutuamente fijos del estator y el rotor, el cual está relacionado conel ángulo y12, entre los ejes en la propia máquina por medio de la relación conocidaα12 = py12
Por dirección positiva de lectura de los ángulos α12 (ó y12) para el momento derotación, que actúa sobro el rotor, adoptaremos la dirección desde el eje del campodel rotor en sentido antihorario.
El ángulo α12, en el régimen estable o estacionario es constante, el momento derotación en el transcurso de una vuelta es también constante, y el momento derotación medio puede ser determinado valiéndose de la siguiente expresión, parauna disposición mutua arbitraria del rotor y el estator:
(/Wm γ∂∂=
.....(2.25)
Para determinar el momento hay que hallar primero la energía del campo magnéticoen el entrehierro en función de B1m, B2m y αl2. La energía del campo magnético enel elemento de volumen dV del entrehierro es
,dV2B
dW0
20
µ= (2.26)
donde
Bo = Bom cos(ρ) es la inducción del campo magnético en el elemento dV,

41
Máquinas Asincronas - Estados Estable y Dinámico
122122
21 cos2 αmmBBmBmBBom ++= es la amplitud de la inducción del
campo resultante en el entrehierro;
ρ, es el ángulo que caracteriza la posición del elemento de volumen dV con respectoal campo resultante;
R1, el radio medio del entrehierro. La energía del campo magnético en el entrehierro
se determina por integración por el volumen del entrehierro V = 2 0δπ δRl . Estaenergía es igual a:
( )
( )12m2m12
m22m1
0
0
o0
2m0
x2
00
20
0
v
cosBB2BB2
lp
dp²cosRl2B
dV2B
W
α++µτδ
=
=ϕϕδµ
=µ
=
∂
∂∫∫ (2.27)
donde t = pR /π es el paso polar.
Ahora hay que girar el rotor a un ángulo pequeño dy considerando las corrientesconstantes, y hallar dW/dy. Recordemos que el ángulo y (o el correspondienteángulo eléctrico α yp) representa el ángulo de giro del rotor con respecto al estator,por ejemplo el ángulo entre el eje de la fase A del estator y el eje de la fase a delrotor (este ángulo se cuenta desde la fase A del estator en dirección positiva, esdecir, en sentido antihorario). Al girar el rotor al ángulo pequeño dy = d/p hacia ellado positivo, para las corrientes fijadas en las fases (ibob = const). se puede observarque la f.m.m. y el campo del rotor se desplazarán junto con el rotor, mientras quela f.m.m. y el campo del estator permanecerán fijos. En este caso el ángulo y12 =α12/p entre la f.m.m. del rotor y la f.m.n. del estator disminuirá en el mismo grado,en el que el ángulo y aumentará (hemos aceptado que oí ángulo Vía so cuentadesde la fase del rotor hacia la fase del estator, os decir, en dirección contraria encomparación con la dirección do lectura do los ángulos y o a). De esto modo, losincrementos de los ángulos
γ
y
γ
12, se diferencian únicamente por el signo
1212
12 dad;P
ddP
dd α−=αα
−=γ−=α
=γ
(2.28)

42
Miguel Ocharán P.a
lo que permite hallar la derivada de la manera siguiente:
( )constm2m1
120
m2m1u
12
B;constB
senBBl²p
ddWp
ddWM
=
∆
=
αµ
τδ=
α−=
γ=
(2.29)
Expresando las inducciones por medio de las corrientes obtenemos:
12m2121 senLII
2PmmM α= (2.30)
donde Lm es la inductancia mutua máxima entre las fases del estator y el rotor
El momento, que actúa en el rotor, es positivo (es decir, está dirigido en sentidoantihorario) para O < α12 < π y negativo cuando < α12 < 2π (o bien O > α12 > —π). Expresando la inducción B2 por medio de la corriente I2 y observando que
πτψ δ /2 22121 devmm kwlB= es la amplitud del flujo concatenado del campo deldevanado del estator con la fase del devanado del rotor, se puede expresar elmomento de rotación por medio de la corriente y el flujo embragado
12m1222 senI2pmM αΨ= (2.31)
En la forma compleja el momento de rotación se determina por la expresión
0221
2 I~~|Im2pmM Ψ= (2.32)
donde 02
~I es la función compleja conjugada de la corriente secundaria.
Partiendo de las expresiones obtenidas no es difícil demostrar que como resultadode la interacción de la corriente del devanado I2, con su propio campo o con elflujo concatenado 22ψ no se crea momento de rotación, en consecuencia estemomento es igual a cero:

43
Máquinas Asincronas - Estados Estable y Dinámico
0senI2Pm
22m2222 =αΨ (2.33)
donde:
πτψ δ /2 22122 devmm kwlB= es la amplitud del flujo embragado del propio campoprincipal con las espiras del devanado del rotor;
22α = 0, el ángulo entre el flujo embragado m22ψ y la corriente I2.
Después de esta observación se puede expresar el momento de rotación por medio
del flujo concatenado total con el devanado dado m20ψ es decir, del flujo concatenado
creado tanto por el campo exterior ( m21ψ ) como por el propio campo m22ψ . Paraello hay que añadir al segundo miembro del momento igual a cero, enlazado con elpropio flujo concatenado:
[ ] [ ]
( )[ ] [ ]
202m202
02m20
202m22m21
2
02m22
202m21
2
senI2pm
I~~Im2pm
I~~~Im2pm
I~~Im2pm
I~~Im2pm
M
αΨ=
=Ψ+Ψ+Ψ=
=Ψ+Ψ=
(2.34)
donde
m20~ψ = m22
~ψ + m21~ψ es el valor máximo del flujo concatenado total del campo
principal con el devanado del rotor;α 20, el ángulo entre la corriente; (o el campo B^ del devanado del rotor) y el flujo
embragado total m20~ψ con este devanado. En el estator actúa un momento
absolutamente igual, pero de dirección contraria.
Hasta aquí, el momento electromagnético de rotación ha sido hallado partiendo dela ley de conservación do la energía. Existe otro método por el cual el momentoelectromagnético puede calcularse como la suma de los momentos debidos a lasfuerzas electromagnéticas que surgen de la interacción del campo magnético

44
Miguel Ocharán P.a
giratorio con los elementos de las corrientes y los elementos de la superficie de loscircuitos magnéticos imantados. Bajo este esquema, con la determinación delmomento se debe obtener una representación más detallada acerca de ladistribución de las fuerzas electromagnéticas a través del volumen de las partesactivas de la máquina, así como de los flujos de energía y sus direcciones. Sinembargo, de acuerdo a lo especificado por los especialistas, la realizaciónmatemática de tal método es sumamente difícil. Excepcionalmente y en formasimplificada para la determinación de la parte principal del momentoelectromagnético, relacionada con los armónicos fundamentales de la f.m.m. y lainducción del campo en el entrehierro, se puede hacer uso de la noción de corrientesuperficial, que sustituye las corrientes en las ranuras del circuito magnético.
2.5TRANSFORMACION UNIDIRECCIONAL DE LA ENERGIA
La transformación unidireccional de la energía en la máquina eléctrica de inducciónpuede transcurrir sólo si se cumple una condición determinada con respecto a lasfrecuencias de las corrientes en el devanado del estator (w1), en el devanado delrotor ω 2 y la frecuencia de variación de la inductancia mutua entre los devanadoses proporcional a la velocidad angular del rotor
ω = p
Ω. Para obtener la
transformación unidireccional de la energía es necesario que la suma o la diferenciado las frecuencias de las corrientes en los devanados sea igual a la frecuencia devariación de la inductancia mutua entre los devanados
ω
1
±
ω
2 =
ω
= p
Ω
. Siesta condición se cumple, es decir que
ω
<
ω
1 y
ω
2 = (
ω
1 -
ω
) entonces losarmónicos fundamentales de las f.m.m. (o de los campos giratorios), generadospor los sistemas simétricos de corrientes en los devanados primario y secundario,giran, con respecto al estator, con iguales velocidades angulares
Ω
1 =
ω
1/p.
El armónico fundamental de la f.m.m. del devanado primario
I~m2F~ 11m1 =
(2.35)
o el armónico fundamental de la inducción del campo del devanado primario en elentrehierro
( )p/wkIwm2/F~B~ 01dev101om1om1 1πδµ=δµ=− (2.36)

45
Máquinas Asincronas - Estados Estable y Dinámico
giran a la velocidad angular eléctrica ω 1 =p
Ω
1 (25-3) en dirección positiva (esdecir, de la fase A a la fase B).
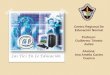
Figura. 2-I. Disposición mutua de los armónicos fundamentales de las f.m.m. yflujos concatenados de los devanados primario y secundario.
El armónico fundamental de la f.m.m. del devanado secundario
( )p/wkI~m2F~ 22dev22m2 π=
(2.37)
o el armónico fundamental del campo del devanado secundario en el entrehierro
( )p/wkI~m2/F~B~ 022dev2020m20m2 πδµ=δµ= (2.38)
giran, con respecto al rotor, con una velocidad angular eléctrica ω 2, igual a lafrecuencia angular de la corriente en el rotor, con la particularidad de que este girosucede también en dirección positiva do la fase a la fase b.
Para hallar la velocidad angular de la f.m.m. del devanado secundario F2, con
respecto al estator (
12ω
), hay que tener en cuenta que el rotor gira a una velocidad
dd d
B
B
B
C
b
M
B
B
12
12=
20
20m1
20m
12
1 1I
I=
2
c
2m 2m
21m1m. 1. om om
2
A

46
Miguel Ocharán P.a
angular eléctrica ω =
Ω
p en dirección positiva y añadir esta velocidad a la
velocidad de desplazamiento de la f.m.m. F2 con respecto al rotor
12ω
= ω 2 +
ω
Si se satisface la condición indicada con respecto a la unidireccionalidad de latransformación de energía, se tiene:
( )112 ω−ω=ω
....(2.39)
En consecuencia, la transformación unidireccional de la energía sucede sólo conla condición de que la f.m.m. del rotor gira con la misma velocidad angular eléctricaω 1= =
Ω
p en el modelo y con la misma velocidad angular w1 en la propiamáquina, a la cual gira la f.m.m. del estator.
2.6PERDIDAS EN LOS PROCESOS DE TRANSFORMACION
2.6.1 EficienciaLa transformación de energía en una máquina eléctrica de inducción, sea de
energía eléctrica a mecánica (motor) o de energía mecánica a eléctrica(generador)tiene lugar si se cumplen las siguientes condiciones:a) El rotor de la máquina gira y a través del árbol (eje mecánico asociado al rotor)
se transmite energía mecánica;b) Circulan corrientes eléctricas por los devanados de la maquina, tales corrientes
poseen frecuencias, las mismas que están relacionadas de una maneradeterminada entre sí y con la velocidad angular del rotor;
c) El campo y por consiguiente los flujos magnéticos asociados con los devanadosvarían periódicamente y a partir de ello se realiza la transformación de la energía.
En consecuencia, al registrarse movimiento del árbol una parte de la energía sedispersará en forma de pérdidas de energía por razonamiento de las piezas derotación, llamadas perdidas mecánicas: otra parte de energía se disipará al circularcorrientes por los conductores de los devanados, respondiendo al efecto Joule, yse les denominará pérdidas eléctricas, y finalmente, debido a los fenómenos dedispersión, no uniformidad del volumen real que contienen los campos (ranuras,dientes, tapas frontales de los devanados, etc.) así como las característicasmagnéticas de los materiales, pero fundamentalmente a las variaciones periódicasde los flujos en los circuitos magnéticos, se producirán las llamadas perdidasmagnéticas.

47
Máquinas Asincronas - Estados Estable y Dinámico
Es normal caracterizar todas las formas de perdidas por la energía térmica que selibera en la unidad de tiempo, y por la suma de la potencia de las perdidas deenergía.
Partiendo de la ley de conservación de la energía se puede concluir que la potenciaútil, transformada en la máquina, es menor que la potencia que ingresa en la máquinapara la transformación en el valor de las perdidas de potencia.
El rendimiento de la maquina
η
en le proceso de transformación electromecánicase determina como la relación de la potencia útil, transformada en la maquina, conrespecto a la potencia total absorbida por la máquina a partir de una fuente externade energía, la eficiencia o rendimiento se calcula por las siguientes expresiones.
a) En el régimen de generador:
∑∑+
−==PP
PPP
elecmec
elec 1η
(2.40)
b) En el régimen de motor:
∑∑+
−==PP
PPP
elecmec
elec 1η (2.41)
La eficiencia es siempre menor que la unidad (η< 1), de modo que cuanto menorparte de la potencia útil transformada se constituyen en pérdidas, tanto más seaproxima la eficiencia o rendimiento a la unidad.
Para evitar el calentamiento excesivo de la máquina, dañar el aislamiento de laspartes activas y acortar el tiempo de vida útil del dispositivo, así como modificar elvalor efectivo de las resistencias eléctricas, cariando sustancialmente lascaracterísticas de funcionamiento de las máquinas; las pérdidas que se desprendenen forma de calor en ella deben ser evacuadas al medio exterior con ayuda delsistema de refrigeración y/o ventilación. Para tal efecto, por ejemplo la carcazaque cubre la máquina presenta aletas, que no son otra cosa que elementos quebrindan mayor superficie de intercambio de calor entre el interior de la máquina yel medio exterior.

48
Miguel Ocharán P.a
2.6.2 Pérdidas EléctricasEn el caso de las máquinas de corriente alterna las pérdidas se calculan
conforme a la resistencia activa del devanado
R =
0RkR
(2.42)
kR es el factor que permite corregir el valor de la resistencia ohmmica del conductorconsiderando la irregularidad de la distribución de la corriente por la sección delreferido conductor.
La irregularidad de distribución de la corriente alterna por las secciones de losconductores, situados en la ranura del circuito magnético, depende de la magnituddel campo de dispersión en la ranura. Dado qué las líneas de este campo sonperpendiculares al eje de la ranura, para la ranura de forma rectangular representancasi líneas rectas, en ese caso el campo de dispersión tiene igual concatenacióncon cualesquiera elementos del conductor, situados a mismo nivel por la altura dela ranura, por lo que en consecuencia resultan iguales las inductancias de estoselementos. Este efecto lo trataremos más adelante, cuando se detalle el fenómenode expulsión de la corriente.Evidentemente este efecto se produce tanto en el rotor como en el estator de lamáquina. Luego para efectos de cálculo se aplicará la conocida fórmula de Joulepara las pérdidas:
P elec = I 2 R (2.43)
Con el fin de disminuir las perdidas eléctricas, los conductores de los devanadosdeben tener la menor resistencia especifica posible 1ρ . El material mas adecuadopara los conductores de los devanados es el alambre de cobre de sección redondao rectangular, los mismos que deberán tener, en lo posible, el más pequeño contenidode impurezas. El uso del aluminio en calidad de material para conductores, enparticular para devanados estatoricos, es limitado; sin embargo, es de uso muydifundido en la aplicación de los devanados de los rotores del tipo jaula de ardilla.El aluminio tiene una mayor resistencia eléctrica específica comparada con la delcobre.
2.6.3 Pérdidas MagnéticasLas perdidas de los circuitos eléctricos de las maquinas eléctricas surgen
fundamentalmente como resultado de la variación periódica del campo magnéticocon el tiempo.

49
Máquinas Asincronas - Estados Estable y Dinámico
Con el fin de disminuir estas pérdidas se recurre a la división del circuito magnéticoen circuitos magnéticos eléctricamente aislados. En este caso, la sección efectivanecesaria del circuito magnético se forma como la suma de las secciones de loscircuitos magnéticos elementales (laminas ferromagnéticas aisladas de uno u otroespesor). El espesor de las laminas y el material, del cual estas laminas se fabrican,se eligen en dependencia de la frecuencia de remagnetización.
Las frecuencias de remagnetización en el estator y en el rotor coinciden con lasfrecuencias de las corrientes en los devanados correspondientes, en el caso generalno son iguales ( 21 ωω ≠ )1). Como ya se vio en el acápite 2.4, en las maquinasasíncronas la relación entre las frecuencias depende de la frecuencia de rotación,y por consiguiente la elección del espesor de las laminas de los circuitos magnéticosdebe realizarse para la frecuencia de rotación nominal. Para alcanzar la distribuciónuniforme del flujo magnético por la sección de la lamina y obtener perdidasmagnéticas admisibles, al aumentar la frecuencia hay que disminuir el espesor delas laminas y pasar a la utilización de aceros para transformadores acerados.
La máquina de corriente alterna, en su variante más común posee dos devanados,uno de ellos esta situado en las ranuras del circuito magnético del estator, y el otro,en las ranuras del circuito magnético del rotor. Si los de los devanados se disponenen las ranuras de un mismo circuito magnético, entonces existen simultáneamentedos campos magnéticos, que varían con distintas frecuencias 1ω y 2ω .
Con bastante frecuencia, sobre todo en los rotores mecánicamente tensados, loscircuitos magnéticos se hacen macizos de piezas de ACRO forjadas o de acerofundido (a veces de hierro colado), como es el caso de los rotores en los motoresjaula de ardilla.
Al analizar la variación del campo, que origina entre otras cosas las perdidasmagnéticas, encontraremos que existen dos tipos de respuestas a estas variaciones,llamadas remagnetizaciones.a) Cuando las líneas del campo están siempre dirigidas en sentido radial y el
campo varía periódicamente solo por su valor se llama remagnetización pulsatoria(o alterna). El vector de inducción en el caso de remagnetización pulsatoria.
b) Cuando el campo permanece continuo y varía únicamente de dirección, elvector de inducción de semejante campo magnético gira con una velocidadangular /2πω = con respecto a la culata, conservando su valor, lo que permitellamar a esta forma de variación del campo remagnetización giratoria.

50
Miguel Ocharán P.a
Es con estas nociones que se procede a calcular las pérdidas magnéticas. Enforma específica, al calcular las perdidas magnéticas debido a las inductanciasmutuas y a las pérdidasmagnéticas en los elementos que se remagnetizan de lasmaquinas eléctricas, montados de chapas aisladas de acero para transformadores,hay que tener en cuenta el carácter de la remagnetización de estos elementos(remagnetización pulsatoria o rotativa), el aumento de las perdidas esta relacionadacon los factores tecnológicos (fabricación), así como con distintas formas depérdidas magnéticas adicionales.
El método convencional para calcular las pérdidas magnéticas en los elementosde los circuitos magnéticos es a partir de las pérdidas totales registradas en unkilogramo de masa del material de1 circuito magnético (estator o rotor), es decir 1Kg. de masa de acero en chapa durante la remagnetización pulsatoria, a unafrecuencia de 50 Hz y una inducción de 1 Tesla, medidas con ayuda del aparatode Epshtein. Estas pérdidas se llaman pérdidas especificas para al inducción de 1
T y se designan
50/0.1P
W/kg. Las pérdidas especificas para otras frecuencia e
inducciones ( )TB 6,1≤ se determinan por la fórmula de conversión siguiente:
=Pmag 50/0.1P ,23,1
50Bf
⎟⎠⎞
⎜⎝⎛
(2.44)
donde f debe encontrarse en el intervalo de 40 a 60 Hz.
Como es sabido, es posible emplear las relaciones, por las cuales las pérdidas porhistéresis son proporcionales a la frecuencia y las pérdidas por corrientes parásitas(junto con las pérdidas adicionales) son proporcionales al cuadrado de la frecuencia,si f varía en una rango mayor.
=Pmag ,5050
1 22
2 BfB ⎟⎠⎞
⎜⎝⎛+σε (2.45)
donde son las pérdidas especificas por corrientes parásitas de histéresis para.501 HzTyfB == W/Kg.

51
Máquinas Asincronas - Estados Estable y Dinámico
σ . Las pérdidas especificas en las chapas de acero para transformadores semiden en condiciones determinadas:
a) Con un aislamiento ideal entre las chapas
b) Con el recogido obligatorio del acero después del tratamiento mecánico (elcorte del acero con ayuda de tijeras o del estampado), para la variación sinusoidalde la inducción. En las construcciones reales de las máquinas eléctricas laschapas de acero, después del tratamiento mecánico, no son recocidas, lo queaumenta las pérdidas de histéresis.
El incremento de las pérdidas magnéticas en los elementos de los circuitosmagnéticos de las máquinas a causa de los defectos de fabricación y laimperfección en la tecnología misma se toma en consideración con los coeficientestecnológicos de aumento de las perdidas.
Al calcular las pérdidas de algunos elementos del circuito magnético hay quetener en cuenta también que la inducción durante la remagnetización pulsatoriavaría no sinusoidalmente (al medir las pérdidas con ayuda del aparato de Epshteinla inducción varía sinusoidal mente).
Para las máquinas de inducción rotatorias «las pérdidas magnéticas se determinanpor la inducción del campo magnético de inducción mutua y del flujo magnético elcual es proporcional a la tensión de la máquina, y casi no depende de la corriente.
En consecuencia, las pérdidas magnéticas son proporcionales al cuadro de la tensiónde la maquina y casi no varían al variar las corrientes en los devanados.
Las pérdidas debidas a la remagnetización de los circuitos magnéticos por loscampos de dispersión de los devanados son proporcionales al cuadrado de lacorriente. Estas pérdidas pertenecen a la categoría de pérdidas adicionales decarga, que dependen de la corriente de carga.
2.6.4 Pérdidas MecánicasLas pérdidas por rozamiento en los cojinetes, las pérdidas por rozamiento de
las escobillas contra los anillos de contacto (si éstos existen), las pérdidas porrozamiento al girar el rotor en el medio ambiente (corrientemente en un entornogaseoso, ocasionalmente en medio líquido), y también las pérdidas por refrigeración,constituyen las pérdidas mecánicas. Las pérdidas en los cojinetes dependen de su

52
Miguel Ocharán P.a
construcción y la clase de lubricante que se emplea En las maquinas pequeñas seobtienen pérdidas admisibles al emplear cojinetes de bolas o de rodillos con grasaconsistente. En las máquinas de mayor potencia se emplean cojinetes dedeslizamiento, los cuales, son lubricados con aceites fluidos. Como en todos loscasos de fricción rotatoria las pérdidas en los cojinetes aumentan al aumentar lafrecuencia de rotación, la masa del rotor y el diámetro del muñón del árbol (superficiede fricción)en la zona de disposición de los cojinetes.

53
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 3
LAS MÁQUINAS ASÍNCRONAS
3.1 NOCIONES GENERALES
Se llama máquina asíncrona a la máquina eléctrica de dos devanados de corrientealterna, en la cual sólo un devanado (el primario) recibe alimentación de la redeléctrica con frecuencia constante w1, mientras que el otro devanado (el secundario)se cortocircuita o se cierra a las resistencias eléctricas. Las corrientes en eldevanado secundario aparecen como resultado de la inducción electromagnética.La frecuencia w2 es función de la velocidad angular del motor Ω, la cual a su vezdepende del momento de rotación aplicado al árbol de la máquina.
Las motores asíncronos con devanado simétrico trifásico con polos de distintosigno en el estator, alimentado desde la red de corriente alterna, y con devanadosimétrico trifásico o polifásico con polos de distinto signo en el rotor, son lasmotores eléctricos de uso más difundido, y se denominan simplemente motoresasíncronos, las máquinas asíncronas de otras variantes se denominan máquinasasíncronas especiales.
El devanado de polos de distinto signo del rotor de un motor asíncrono puede seren jaula (jaula de ardilla)o de fase (rotor bobinado). Los más aplicados son losmotores con devanado en jaula en el rotor, o también denominados en cortocircuito.Su fabricación es barata y la explotación fiable.
Una de las principales características mecánicas del motor es que al variar lacarga desde la marcha en vacío hasta la nominal su frecuencia de rotación disminuyesolamente en un 2.5%).

54
Miguel Ocharán P.a
Los motores con devanado en jaula en el rotor poseen también un momento derotación de arranque inicial bastante alto.
Podemos citar entre sus principales deficiencias, las siguientes:a) Dificultad de realizar la regulación suave de la frecuencia de rotación entre
amplios límites;b) Consumo de corrientes de alta intensidad de la red durante el arranque (que
superan de 5 a 7 veces la corriente nominal).
Los motores con devanado de fase en el rotor o motores de anillos están exentosde estos defectos a cuenta de la complicación de la estructura del rotor, lo queconduce a su notable encarecimiento en comparación con los motores encortocircuito (aproximadamente en 1.5 veces). Por ello, los motores de anillos enel rotor se emplean sólo en los casos de pesadas condiciones de arranque, asícomo en caso dé necesidad de regular suavemente la frecuencia de rotación.
En lo que sigue centraremos nuestra atención en un motor asincrono trifásico demediana potencia, sin embargo es necesario hacer notar que existen diversostipos de máquinas asíncronas como por ejemplo los motores asíncronos monofásicoscon devanado de arranque, los con capacitor ,los de polos blindados, y en el grupode los motores trifásicos, los generradores, convertidores de frecuencia, con rotormacizo, con rotor amagnético hueco, bombas electromagnéticas de inducción ymotores de línea y de arco, entre los llamados tipos especiales. Por otro lado,existen dipositivos como los generadores tacométricos, los transformadoresgiratorios y los selsynes monofásicos.
3.2 DATOS PARA EL DISEÑO Y FABRICACION
Las principales características técnicas para el diseño y fabricación de los motoresasíncronos, llamadas nominales, que deben ser indicadas en los protocolos defabricación y en la placa de cada máquina, son las siguientes:
• La potencia mecánica desarrollada por el motor, Pnom === P2nom;• La frecuencia de la red f1;• La tensión de línea del estator U1nom.lfn;• La corriente de línea del estator I1nom.lfn;• La frecuencia de rotación del rotor nnom;• El coeficiente de potencia cosp1nom;• El rendimiento nnom;

55
Máquinas Asincronas - Estados Estable y Dinámico
Para el caso de los motores de anillos deberá registrarse la tensión en los anillosabiertos cuando el rotor se encuentra inmóvil y la corriente lineal del rotor en elrégimen nominal.
Los datos nominales de los motores asíncronos varían entre límites muy amplios:a) La potencia nominal, desde fracciones de watio hasta decenas de miles de
kilowatios.b) La frecuencia nominal sincrónica de rotación n1om ==60 f1/p para la frecuencia
de red de 60 Hz varía desde 3600 hasta 600 r.p.m. y menos en casosparticulares; para elevadas frecuencias, hasta 100 000 r.p.m. y más (lafrecuencia nominal de rotación del motor es corrientemente en un 2. a 5%menor que la sincrónica; en los micromotores, en un 5 a .20%).
c) La tensión nominal varia desde 24 V hasta 10 kV (los valores mayores parapotencias mayores).
d) La eficiencia nominal de los motores asíncronos aumenta al aumentar supotencia y su frecuencia de rotación; para la potencia mayor de 0.5 kV esterendimiento constituye 0.05.....0.95, en los micromotores de 0.2 a 0.65.
e) El factor nominal de potencia de los motores asíncronos, igual a la relación dela potencia activa a la potencia total consumida de la red,
3.3ASPECTOS CONSTRUCTIVOS DEL MOTOR CON ROTORCORTOCIRCUITADO
La composición constructiva de una máquina asíncrona con rotor en cortocircuitose representa en la figura 3-1.Del Libro Máquinas Eléctricas de I.A. Ivanov – Smolenski, tomamos la informaciónprincipal sobre este tópico.
3.3.1 Partes activas del estatorEl estator de la máquina se compone de:
a) Circuito magnéticob) Devanado trifásico de polos de distinto signoc) Terminales, bornera y,d) Bancada, chasis o carcaza
Los elementos activos del estator, destinados especialmente para crear el campomagnético giratorio, son el circuito magnético y el devanado. El circuito magnéticodel estator se compone de placas aisladas de acero para transformadores,corrientemente de 0,5 mm de espesor. Las placas se estampan de acero para

56
Miguel Ocharán P.a
transformadores en chapa y en rollo con dimensiones normalizadas y son aisladaspor ambos lados con laca o barniz.
MOTOR ASINCRONO CON ROTOR TIPO JAULA DE ARDILLA SERIE 4A2. Estrías de ventilación en carcasa; 4. Alabes de ventilador; 5. Base portacojinete;
6. Tapa lateral; 7. Eje del motor; 8. Perno de fijación; 9. Espárrago;11. Caja de borneras; 13. Carcasa parte lateral; 14. Núcleo del estator (parte exterior)
Con el fin de disminuir las pulsaciones del campo magnético y las pérdidasadicionales relacionadas con el carácter dentado del circuito magnético, el devanadodel estator, como regla, se coloca en las maquinas asíncronas en ranurassemicerradas.
3.3.2 Partes activas del rotorEl rotor de la maquina se compone de:
a) Circuito magnético, en las ranuras del cual se encuentra el devanado encortocircuito de fases múltiples no aislado,
b) Las palas de ventilación incorporadas al devanado,c) El árbol y uno o más ventiladores
Los elementos activos del rotor, que participan activamente en el proceso detransformación de la energía, son el circuito magnético y el devanado. Las demáspiezas tienen destinación constructiva el árbol transmite la energía. Los ventiladoresaseguran la circulación del medio refrigerante.
8

57
Máquinas Asincronas - Estados Estable y Dinámico
El circuito magnético del rotor se compone de placas anulares enterizas estampadasde chapas de acero para transformadores de 0,5mm de espesor en la parte exteriorde las cuales se han cortado las ranuras de la forma requerida (cerradas osemicerrados).
Las placas del circuito magnético del rotor se arman en un mandril especial, seprensan en él y se mantienen en estado prensado durante el proceso de fabricacióndel devanado en cortocircuito. El devanado en cortocircuito se funde de aluminioy no se aísla del circuito magnético. Los anillos de tope que cierran por los ladoslas barras de devanado, se funden en una sola pieza con las barras.
Simultáneamente en forma salientes a los anillos de corto circuito se funden laspalas de ventilación
El árbol del rotor se apoya sobre cojinetes de contacto rodante.
El cojinete de bolas 12 centra el rotor no solo en dirección radial, sino también enaxial, soportando junto con los esfuerzos radiales, también los axiales. El árbol delrotor debe ser lo suficiente rígido, y el tratamiento mecánico de las piezasconstructivas que aseguran la posición correcta del eje del árbol en el espaciodebe realizarse con alta exactitud.
La elevación del motor durante la reparación se realiza con ayuda de la argolla,también llamada «cáncano».

58
Miguel Ocharán P.a

59
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 4
DETERMINACIÓN DE LOS PARÁMETROS DE LAMÁQUINA ASÍNCRONA TRIFÁSICA CON ROTOR JAULA
DE ARDILLA SOBRE LA BASE DEL RESULTADO DELDISEÑO.
Cálculo del motor jaula de ardilla. 13 KW, 3φφφφφ, 220/380V, 60 Hz, 1800RPM. Régimen de Trabajo Programado, Construcción Protegida,Ventilador Radial (máquina normal de serie tipo 4A)
4.1 EFICIENCIA Y FACTOR DE POTENCIA NOMINALES
De la Tabla 4-1, cosfn=0.88; hn=0.885
4.2. SELECCIÓN DE LAS DIMENSIONES PRINCIPALES
4.2.1. Número de pares de polos
21800
60.60n60.frp1
===
4.2.2. Potencia de cálculo.
( )( )( )( ) KVA
nnn 2,16
88.0885.01397.0
cos==
ΡΚΕ=Ρ′
φη
Donde KE =0.97 según la Figura 4-1

60
Miguel Ocharán P.a
4.2.3 Diámetro Interior y Exterior del Estator.De la Figura 4-2, en función de la Potencia y el número de polos.
D ≈ 19 cm.Da ≈ 1,58D ≈ 30 cm.
Luego, el diámetro más cercano exterior es
Da≈29,1 cm. (Diámetro exterior).
De donde .cm42,1858,1
1,29D =≈
Tomamos D = 18,40 cm. (Diámetro interior)
MAQUINAS ASINCRONAS TIPO A2-A4 EFICIENCIA % COSΦ RPM 3000 1500 1000 750 3000 1500 1000 750 POTENCIA 7.5 85 10 87 87 0.86 0.78 13 88.5 88 87.5 0.88 0.86 0.81 17 88 89.5 89 88.5 0.88 0.88 0.87 0.82 22 89 90 89.5 89 0.88 0.88 0.87 0.82 30 90 90.5 90 90 0.88 0.88 0.88 0.82 40 90.5 91 91 91.5 0.89 0.89 0.89 0.84 55 91 92 92 92 0.89 0.89 0.89 0.84 75 92 92.5 92.5
TABLA 4-1
EFICIENCIA Y FACTOR DE POTENCIA

61
Máquinas Asincronas - Estados Estable y Dinámico
FIG. 4.1 Coeficiente de tensión vs numero de pares de polos
4.2.4. Paso Polar
.cm45,144
4,18xp2D
=π
=π
=τ
4.2.5 Longitud de Cálculo del Estator.
nDABkkP*01*1,6l 2
1ob
1
∂∂α
′′=∂
Donde:
P1: potencia calculada de la máquina = 16.2 en KVA.
1.00
0.98
0.96
0.94
0.92
0.90
0.88
0.86
K E
2 4 6 8 10 12 14 16 18 20
P

62
Miguel Ocharán P.a
De la Figura 4-3, para τ = 14.45 cm, si asumimos los siguientes valores:
∝∂=0.715Kb=1,090A =310 amp/cm.B∂=7200 gauss
Y seleccionemos el devanado en bucle para dos capas, con lo que K01 ≈0.91Obtenemos:
l∂=12.25 cm. ., tomamos l∂ = 12.3 cm.
4.2.6. Longitud Real del Estator.
l1=l=l∂=12.3 cm.
La Tabla 4-2 contiene las variables de cálculo típicas para motores del tipo 2A y 4ªen 13 y 17 Kw.
Fig. 4.2 Relación Diámetro vs Número de polos y potencia de diseño
P = 6
78
10
15
20
30
40
5060
80D
cm
1 2 3 4 5 7 10 20 30 40 50 60 70 100 200 700500300KWA
P = 1
2
3
4
5

63
Máquinas Asincronas - Estados Estable y Dinámico
Fig. 4.3 Densidad de flujo e intensidad de corriente vs longitud de paso polar y númerode pares de polos
4 12 20 28 36 44 52
150
250
350
450
6 000
6 400
6 800
7 200
7 600
8 000
8 400
Amp/cm A
gauss
cm
P = 2412 6 3 2
7
P = 6 3 2
1

64
Miguel Ocharán P.a
4.3 PARTES ACTIVAS DEL ESTATOR
4.3.1. Número de ranuras por polo y por fase
Se seleccionó q1 = 3.
4.3.2. Número total de ranuras del estator
Z1 =6.p.q1=6.2.3=36.
4.3.3. Paso de dientes del estator
t1 = cmxD 605,136
4,18
1
==Ζ
ππ
4.3.4. Corriente Nominal por fase.
cos10.
1
3
1 VmP
n
nn =Ι
η
(para 220/380 V – conexión de fases ∆/Υ)
4.3.5 Número efectivo de conductores por ranura.
(para a1 = 1).
7,193,25
1x6055,1x310aAt
n1
111n ==
Ι=µ
Seleccionamos µn1 =20, (a1 =número de hilos/conductor).
4.3.6 Sección y diámetro de los conductores de devanado del estator.Considerando una densidad de corriente admisible ∆c≈5,2 amp/mm2,
obtenemos la sección teórica:

65
Máquinas Asincronas - Estados Estable y Dinámico
2
c11
n11c mm62,1
2,5x3x13,25
qas ==
∆Ι
=
Seleccionamos la sección comercial inmediata inferior, esto es:s1
c=1,651 mm2
4.3.7. Densidad Real de Corriente.
2
c
n1c mm/.amp10,5
561,1x1x33,25
s1a1q−==
Ι=∆
4.3.8 Dimensiones de la ranura, diente y aislamiento de la ranuraEl número total de conductores por fase es:
nt = µn1 nε=20x3=60
El diámetro nominal de los conductores considerando el aislamiento es:de = 1.56 mm2
por tanto la sección llena de la ranura es:
22
3
21 mm200
0,73
1,5660
k
danttS =
×==
k3=0,73,
Considerando S1t≈200 mm2, y tomando como base la información contenida
en la Tabla 4-3 y la Figura 4-4, el valor real de S1t≈197 mm 2
4.3.9 Valor real del coeficiente de relleno.
74,0197146
tSadn
1
2t
3 ===Κ

66
Miguel Ocharán P.a
4.3.10 Determinación del valor de inclinación de la ranura.Tómanos bc=12,5 mm como valor de diferencia entre la cabeza y la cola del
vástago o barra de la jaula de ardilla, entonces:
461
4,185,12
Dbc
C1
=π
=π
=
4.3.11 Número total de espiras del estator
12012032
1
11 =××==
apq nµω
4.3.12 Paso del devanado
778,097==
τγ
=β
γ=0.83*t= 0.83*9 =7γ=7, para (1→8)
Nro. Variables
Da D τ A Bδ Lδ L1 Lδ/τ (13kW)
Lδ/τ (17kW)
1 29.10 18.47 14.45 310 7200 12.30 12.30 0.852 1.11 2 24.80 16.70 12.30 280 7100 19.00 19.00 1.545 2.02 3 34.30 21.60 16.95 330 7300 8.30 8.30 0.490 0.81
TABLA 4-2
VARIABLES DE CÁLCULO

67
Máquinas Asincronas - Estados Estable y Dinámico
Nro Material Características Valores Totales Espesor
(mm) Cantidad Vertical
Cantidad Horizontal
Ancho Vertical
Ancho Horizontal
1 Conductor tipo Cu-PTV 1.45/1.56
2 Papel aislante seco 0.27 2 3 0.54 0.8 3 Papel aislante en aceite 0.27 2 3 0.54 0.8 4 Material aislante resina 0.27 2 0.54 5 Idem anterior 0.27 1 0.27 6 Madera 3 1 3 Valores para la ranura 1.1 5.4
TABLA 4-3
COMPONENTES DE LA RANURA DEL ESTATOR (Fig. 4-4)
Pares de polos Estator Rotor c/inclinación Rotor s/inclinación 2 18 26 24 16,32 18,30,31,33,34,35 30 22,38 18,20,21,23,24,37,39,40 36 26,28,44,46 25,27,28,43,45,47 42 32,34,50,52 48 38,40,56,58 59 4 24 32 16,20,30,33,34,35,36 36 26,44,46 24,27,28,30,32,45,48 42 34,50,52,54 33,34,38,51,53 48 34,38,56,58,62,64 36,39,40,44,57,59 60 50,52,68,70,74 48,49,51,56,64,69,71 72 62,64,80,82,86 61,63,68,76,81,83
TABLA 4-4
NÚMERO DE RANURAS DEL ESTATOR Y ROTOR(En función del número de polos)
4.3.13 .Coeficientes o Factores de Corrección para el Devanado-
Kπ1=0,94 i Kδl =0.902 (ver tabla 4.6)

68
Miguel Ocharán P.a
4.3.14 Flujo magnético en el entrehierro
( )( )( )( )( )( )( )
68
1o11
8n1E
10*7525.0902,01206009,14
1022097,0
KWfKb410UK
==φ
=φ
4.3.15. Inducción magnética en el entrehierro
( )( )( )( )( ) 5920
3,1245,14715,0107525,0B
8==
αδτφ
=δl
gauss
4.3.16 Inducción máxima (y media) en el diente
( )( )( )( )( )( )95,03,1273,0
95,0605,15920k**b
*t*BBc1z
1zicpzim =
λδδ==Β
l
Bzim = 13 700 gauss
Considerando el acero electrotécnico
Para l<14 cm. , tomamos kc =0.95 ,con aislamiento de espesor 0,5 mm.
4.3.17 Altura del yugo del estator.
.cm88,255,22
4,181,29hc
h2
DDahc 1z
=−−
=
−−
=
De la geometría de la máquina hz1=2,55 cm.

69
Máquinas Asincronas - Estados Estable y Dinámico
4.13.18 Inducción en el yugo del estator.
( )( )( ) 500,1195,03,128,22
10*7525,0khc2
B6
cc ==
φ=
l gauss
4.13.19 Entrehierro según la Figura 4-5.
δ=0.45 mm.
Fig. 4.4 RANURA DEL ESTATORForma y dimensiones características de la ranura del estator de la máquina en estudio
960º
16,05
0,6 3,1

70
Miguel Ocharán P.a
Fig.
4.5
, 4.6
, 4.7
E
ntre
hier
ro (
δδδδ δ) v
s D
iám
etro
del
est
ator
y n
úmer
o de
par
es d
e po
los
5010
015
020
00
0,10,2
0,3
0,4
0,5
0,6
0,7
mm
mm
123mm
mm
020
040
060
080
010
0012
00
2 P =
2
2 P =
4 +
10
1000
2000
3000
123mm
2 P =
18 +
56
2 P = 2
4
68
10 1214

71
Máquinas Asincronas - Estados Estable y Dinámico
B G
auss
0
100
200
300
400
500
600
700
800
900
B G
auss
40
00
1.40
1.
43
1.46
1.
49
1.52
1.
53
1.58
1.
61
1.64
1.
67
4000
50
00
1.71
1.
75
1.79
1.
83
1.87
1.
91
1.95
1.
99
2.03
2.
07
5000
60
00
2.11
2.
16
2.21
2.
26
2.31
2.
36
2.41
2.
46
2.51
2.
56
6000
70
00
2.61
2.
66
2.71
2.
76
2.81
2.
87
2.93
2.
99
3.06
3.
12
7000
80
00
3.18
3.
24
3.30
3.
37
3.44
3.
52
3.60
3.
69
3.78
3.
87
8000
90
00
3.97
4.
07
4.17
4.
27
4.37
4.
47
4.58
4.
69
4.80
4.
91
9000
10
000
5.02
5.
14
5.27
5.
41
5.55
5.
70
5.85
6.
00
6.15
6.
31
1000
0 11
000
6.47
6.
64
6.82
7.
01
7.20
7.
39
7.59
7.
79
8.00
8.
21
1100
0 12
000
8.43
8.
66
8.91
9.
18
9.46
9.
76
10.1
0 10
.40
10.7
0 11
.00
1200
0 13
000
11.4
0 11
.80
12.2
0 12
.60
13.0
0 13
.40
13.8
0 14
.30
14.8
0 15
.30
1300
0 14
000
15.8
0 16
.40
17.1
0 17
.80
18.6
0 19
.50
20.5
0 21
.50
22.6
0 23
.80
1400
0 15
000
25.0
0 26
.40
27.9
0 29
.50
31.1
0 32
.80
34.6
0 36
.60
38.8
0 41
.20
1500
0 16
000
43.7
0 46
.30
49.1
0 52
.20
55.3
0 58
.80
62.3
0 66
.00
69.8
0 73
.70
1600
0 17
000
77.8
0 82
.00
86.3
0 90
.70
96.3
0 10
1.00
10
6.00
11
1.00
11
6.00
12
2.00
17
000
1800
0 12
8.00
13
4.00
14
2.00
14
6.00
15
2.00
15
9.00
16
6.00
17
3.00
18
0.00
18
8.00
18
000
1900
0 19
7.00
20
6.00
21
6.00
22
6.00
23
6.00
24
6.00
25
6.00
26
8.00
28
2.00
29
6.00
19
000
2000
0 31
0.00
32
5.00
34
3.00
36
5.00
39
0.00
42
0.00
45
5.00
49
5.00
54
5.00
59
5.00
20
000
2100
0 65
5.00
72
5.00
80
0.00
88
0.00
96
0.00
10
40.0
0 11
20.0
0 12
00.0
0 12
80.0
0 13
60.0
0 21
000
2200
0 14
40.0
0 15
20.0
0 16
00.0
0 16
80.0
0 17
60.0
0 18
40.0
0 19
20.0
0 20
00.0
0 20
80.0
0 21
60.0
0 22
000
2300
0 22
40.0
00
2320
.00
2400
.00
2480
.00
2560
.00
2640
.00
2720
.00
2800
.00
2880
.00
2960
.00
2300
0 24
000
3040
.00
3120
.00
3200
.00
3280
.00
3360
.00
3440
.00
3520
.00
3600
.00
3680
.00
3760
.00
2400
0 25
000
3840
.00
3920
.00
4000
.00
4080
.00
4160
.00
4240
.00
4320
.00
4400
.00
4480
.00
4560
.00
2500
0 TA
BLA
4-5
IND
UC
CIÓ
N M
AG
NÉT
ICA
EN F
UN
CIÓ
N D
E LA
DEN
SID
AD
DE
FLU
JO D
E M
ATER
IALE
S E11
, E12
, E13

72
Miguel Ocharán P.a
Pares de Polos
2 4 6 8 ó + Considerando 2 4 6 8 ó +
TABLA 4-6CÁLCULO DE LONGITUD DE BOBINAS DEL ESTATOR(En función del número de polos)

73
Máquinas Asincronas - Estados Estable y Dinámico
TAB
LA
4-7
CO
EFI
CIE
NT
E D
E C
OR
RE
CC
IÓN
DE
IM
PED
AN
CIA
CO
NSI
DE
RA
ND
O L
A I
NC
LIN
AC
IÓN
DE
LA
RA
NU
RA
DE
L R
OT
OR
ε γ E
15
20
25
30
35
40
45
50
55
60
65
70
10
1.01
77
1.02
40
1.03
10
1.03
60
1.04
30
1.04
90
1.05
50
1.06
20
1.06
80
1.07
40
1.08
10
1.08
70
12
1.02
56
1.03
47
1.04
40
1.05
30
1.06
20
1.07
10
1.08
00
1.08
80
1.09
80
1.10
70
1.17
00
1.12
60
14
1.03
47
1.04
71
1.05
90
1.07
20
1.08
40
1.09
70
1.10
90
1.12
20
1.13
40
1.14
60
1.15
90
1.17
10
16
1.04
50
1.06
10
1.07
80
1.09
40
1.10
00
1.12
60
1.14
20
1.15
90
1.17
50
1.19
20
1.20
70
1.22
30
20
1.07
00
1.09
60
1.12
10
1.14
60
1.17
20
1.19
70
1.22
00
1.24
70
1.27
30
1.29
80
1.32
40
1.34
80
225
1.10
00
1.14
90
1.18
90
1.28
00
1.26
70
1.30
70
1.34
60
1.38
50
1.42
40
1.46
30
1.50
10
1.54
00
30
1.15
90
1.21
60
1.27
30
1.33
00
1.38
70
1.44
40
1.50
00
1.55
80
1.61
50
1.67
10
1.73
00
1.78
60
40
1.35
70
1.48
50
1.61
20
1.74
00
1.86
80
1.99
00
2.12
00
2.25
00
2.38
00
2.50
50
2.63
00
2.76
00
50
1.74
50
2.01
00
2.27
00
2.54
00
2.81
00
3.07
00
3.34
00
3.60
00
3.87
00
4.14
00
4.40
00
4.66
00
60
2.15
00
2.56
00
2.97
00
3.38
00
3.80
00
4.20
00
4.62
00
5.03
00
5.44
00
5.85
00
6.25
00
6.66
00

74
Miguel Ocharán P.a
4.4 PARTES ACTIVAS DEL ROTORDEVANADO, RANURAS Y YUGO DEL ROTOR.
4.4.1 Número de ranuras del rotor.
Ζ2=46 (Ver Tabla 4-4)
4.4.2 Diámetro exterior del rotor.
D’=D-2δ=18,4-2(0,045)=18,31 cm.
4.4.3 Paso del diente del rotor.
( ) cm25,146
31,18´Dt2
2 =π
=Ζπ
=
4.4.4 Corriente en la barra ó vástago de la jaula de ardilla(para K1 =0.92)
( )( ) .amp32846
902,012063,2592,0
Kw6k
2c
2
1o1n112c
=⎟⎠⎞
⎜⎝⎛ ××
=Ι=Ι
⎟⎟⎠
⎞⎜⎜⎝
⎛Ζ
Ι=Ι=Ι
4.4.5 Corriente en el anillo cortocircuitado del rotor
amp
I
Zp
k
cck
1205272.01328
1
sen2
1
2
=⎟⎠⎞
⎜⎝⎛=Ι
⎟⎠⎞
⎜⎝⎛∆
=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
Ι=Ι π

75
Máquinas Asincronas - Estados Estable y Dinámico
272.0462sen2sen2
2
===∆ππ
Zp
4.4.6 Sección del vástago o barra para un valor de densidad de corriente
∆c ≅ 3.4 amp/cm2
2974.3
328 mmISc
cc ==
∆=
4.4.7 Sección de anillo cortocircuitado para un valor de densidadde corriente ∆∆∆∆∆k ≈≈≈≈≈ 2,6 amp/mm2
2
Kk mm465
6,21205IkS ==
∆=
4.4.8. Tamaño de la ranura y del diente del rotorDe las Figuras 4-7 y 4-8, obtendremos que
tr2=28 mm
bm2=1,5 mm
Además, puesto que
297 mmScSt ≈=
obtenemos,
mm47,32897
2trStb 2r ≈==
tomamos br2 = 3,5 mm

76
Miguel Ocharán P.a
4.4.9 Area de la ranura.Según la Figura 4-8
( )22
22r2rct bmb5.0b2hrSS −+==
( )( ) ( ) 222ct mm1035,15,35,05,328SS =−+==
4.4.10 Tamaño de los anillos cortocircuitados.
Sr=ab=(33)(14)=462 mm2
(la sección del anillo es trapezoidal)
4.4.11 Altura de yugo del rotor
( ) ( )cm675,304,3
26631,18
hp
h2
aDaDDhp
61
2z61
=−+−
=
−′+′−′
=
El valor de la altura del diente del rotor es tomado a parir de la geometría delmismo hz2 = 3,04cmFog4.7f.i4.8
4.4.12 Inducción en el yugo del rotor.
( )( ) ( ) gauss841595,0)8,12(675,32
10*7525,0k*2*hp*2
Bp6
2c==
φ=
l
(La longitud l2=l1+0,5=12,3+0,5=12,8 cm)

77
Máquinas Asincronas - Estados Estable y Dinámico
4.5 FLUJOS DE MAGNETIZACIÓN.
4.5.1 Coeficiente para el cálculo del valor del flujo de magnetización enel entrehierro.
14,1k =l
193,005,16
10,3t
1bm1
==
para
07,1k
90,645,010,31bm
2 =
==δl
33,345,050,12bm
12,05,12
50,12t2bm
==δ
==
finalmente:
( ) 22,1)07,1(14,1k*kk 21 === lll
4.5.2 Tensión magnética en el entrehierro.
( )( )( )( ).amp520F
045,022,159206,1*k*B*6.1F=δ
=δ∂=δ l
4.5.3 Tensión magnética en los dientes del estator.
( )( ) .amp93,72)30,14(55,22H*l*2F 1z1z1z ===

78
Miguel Ocharán P.a
(de la Tabla 4-5 para Bzicp= 13.700 gauss Hzi=14,30
amp/cm.; además lzi = hz1 = 2,55 cm.)
4.5.4 Tensión magnética en los dientes del rotor.
( )( )( ) .amp67,6098,904,32Hl22Fz 2z2z ===
Hz2 se calcula a partir de las inducciones en los dientes del rotor:
( )( )( )( )( )( ) gauss8507
95,08,1288,03,1225,15920
k*l*bl*t*BB
c2max2z
2min2z
==
∂δ=
( )( )( )( )( )( ) gauss14973
95,08,125,03,1225,15920
K*l*bl*Z*B
Bc2min2z
2max2z
==
∂δ=
En consecuencia Bz2cp, inducción promedio es
Bz2cp = 11 740 gauss,
En consecuencia de la Tabla 4-5 hallaremos:
H2zmin = 3,52 amp/cm
H2zmax = 24,60 amp/cm.
H2zcp = 7,94 amp/cm
Hz2 = 1/6 (3,52+24,60+4(7,94))= 9,98 amp/cm.

79
Máquinas Asincronas - Estados Estable y Dinámico
4.5.5. Coeficiente o factor de saturación de los dientes
159,1520
98,993,72520F
FFFk 2z1zz =
++=
δ++δ
=
4.5.6. Precisión de las magnitudes de la inducción y la tensión magnéticaen los dientes del estator, del rotor y del entrehierro.
Puesto que el factor kz es diferente de 1,325 que corresponde a ∝δ = 0,715,entonces repetimos el cálculo de Fz1, Fz2, Fδ; afectándolos por el valor decorrección siguiente:
Tomando por interpolación:
aδ = 0.705 para kz=1,159
Las ecuaciones en este caso varían en la proporción
014,1705,0715,0
=
En consecuencia los valores corregidos son:Bδ 6003 gaussFδ 527 amp.Bz1cp 13890 gaussHz1 14,50 amp/cm.FZ173,95 amp.Bz2min 8626 gaussHz2min 3,57 amp/cmBz2max 15183 gaussHz2max 24,94 amp/cm.Bz2cp 11904 gauss10Hz2cp 8,05 amp/cm.Hz2 10,12 amp/cmFz2 61,52 ampKz 1,159

80
Miguel Ocharán P.a
4.5.7. Tensión magnética del yugo del estator.
Fc = ξ*Hc*ϑc=(0,45)(7,39)(20,6)=68,51 amp
(de la Tabla 4-5, para Bc = 11500 gauss)
Hc = 7,39 amp/cm; de la Figura 4-9
ξ=0,45
( ) ( ) cm6,204
8,21,29p2
hcDalc =−π
=−π
=
4.5.8 Tensión magnética del yugo de rotor
Fp = ξ*Hp*lp =(0,62)(3,46)(7,56)= 17 amp.
(de la tabla 4-5 para Bp = 8415 gauss)
Hp = 3,46 amp/cm, de la Figura 4-9
ξ= 0.62
( ) ( ) .amp56,74
615,36p2
haDl p
1
p =+π
=+π
=

81
Máquinas Asincronas - Estados Estable y Dinámico
Fig. 4.8 Ranura del rotor: dimensiones (mm)
Fig. 4.9 Factor de corrección para tensión magnética (x) vs densidad de flujo
3,5
5
8,8
12,5
1,5
0,4
30,4
2 8
0
0,2
0,4
0,6
0,8
4 6 8 10 12 14 16
Bc (Bp)
Kgauss

82
Miguel Ocharán P.a
4.5.9. Fuerza de magnetización del circuito magnético.
.amp25,7481751,6852,6195,7328,527FpFcFFFF 2z1z
=++++=++++δ=µ
4.5.10 Coeficiente total de saturación.
42,128,52725,748
FFk ==δµ
=µ
4.5.11 Corriente de magnetización.
( )( )( )( )( )( ) .amp12,5
902,012039,025,7482
Ko,w.m9,0F*pI
1==
µ=µ
y el valor por unidad es
%24,20100x3,25
12,5100xII%IiN
==µ
=µ
4.6 PARÁMETROS DEL MOTOR EN RÉGIMEN DE TRABAJO
4.6.1 Longitud de la parte frontal del devanado del estator
( )( ) ( ) 85.21128.1255.11211
=+=
+=
π
τππ
lBxkl yi
( ) ( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==−
=+
=+
=
cmBKTablalade
cmZ
hDyy
155.1,64:
.8.1236
5.24.18711
1
11
π
πππτ

83
Máquinas Asincronas - Estados Estable y Dinámico
4.6.2 Longitud hacia la salida de la parte frontal del estator.
lB1 = kBi ℑu1+B =(0.5)(12.8)+1= 7.4 cm.
4.6.3 Longitud media de la semiespira del devanado del estator.
lcp1 = l1 + lπ1 = 12.3 + 21.85 = 34.15 cm
4.6.4 Longitud total del conductor del devanado del estator.
lt1 = 2*w1lcp *10-2 = (2)(120)(34,15)(10-2) = 82 m
4.6.5 Resistencia activa del devanado del estator.
3601,01*65,1*3
82*581
1a*cs*cn1tl
75r1 ==ρ=
en valores por unidad:
%14,40414,0220
3601,0*3,25
N1V1r*N1I*
1r ====
4.6.6 Resistencia activa del devanado del rotor.
2ar2
pr2r ∆+=
rp = resistencia del vástago.ra = resistencia del anillo.*Cálculo de la resistencia del vástago.

84
Miguel Ocharán P.a
ohm10*4,5103
210*80,12*231
cs
210*2lCº75,alpr
5−=−
=−
ρ=
(para el aluminio colado de Tablas ρal = 1/23)
*Cálculo de la resistencia de cortocircuito del anillo.
2*rs*2Z
210*1'D*C75,al22ar2kr ∆
−πρ=
∆=
ohm10*61,22272,0
1462*46
210*01,15*1416.32312kr
5−=−
=
D1 =D2–a =18,31-3.3 =15.01 cm
∆ = 0,272
en consecuencia
r2 = 8,01*10-5
4.6.7 Factor de reducción de los parámetros del rotor jaula de ardilla aldevanado del estator.
v = 4 m1(w1*ko)2 /Z2 =(4)(3)(120*x 0,902)²/46
v = 3,06 x 10³
4.6.8 Resistencia activa del devanado del rotor reducida al devanadodel estator.
r2 = r2v =(8,01)(10-5)(3,06)(10³)=0,245 ohm

85
Máquinas Asincronas - Estados Estable y Dinámico
su valor por unidad
%20,28u.p282,0220
245,0*3,25
n1V2r*N1I*
2r ====
4.6.9 Factores para el cálculo de la conductibilidad magnética dedispersión del estatorPara los valores de fórmulas y tablas consignados en el Apéndice 1
λπ1 = 1,26
λd1 = 1,62
λf1 = 1,21
∑λ1 = λπ1 + λd1 + λƒ1
= 1,26 + 1,62 + 1,21
= 4,09
4.6.10 Resistencias inductivas de la dispersión del flujo en el devanadodel estator.
11
21
211
1 q*p*100*100*w*f
*158,0x λ∑=l
Ω== 1446,106,4*3*2*2100*100
3,12*2120*60*158,0x1
en valores por unidad.
x1* = 0,1316 p.u. = 13,16%

86
Miguel Ocharán P.a
4.6.11 Factores para el cálculo de la conductibilidad magnética dedispersión del rotor.Análogamente del Apéndice 1, para el rotor:
λπ2 = 3,386
λd2 = 1,860
λƒ2 = 0,845
∑λ2 = ∑π2 + ∑d2 + ∑f2 = 6,091
4.6.12 Resistencias inductivas de dispersión de devanado del rotor
Ω=
=λ∑=−
−−δ
32
33212
10*3696,0x
10*091,6*8,12*60*9,910***f*9,9x l
4.6.13 Valor de la resistencia inductiva del devanado del rotor reducidaal devanado del estator.
x2= (0,3696*10-3)(3,06 x 103) = 1,1309 ohm
en valores por unidad.
x2 = 0,1309 p.u. = 13,09%
4.6.14 Resistencia inductiva de la inducción recíproca (sin considerarla inclinación de las ranuras)
Ω=−=µ
µ−≈ 82,41
12,51446,1*12,5220
I1x*IN1V
12x
en valores por unidad.x12 = 4,47 p.u.

87
Máquinas Asincronas - Estados Estable y Dinámico
4.6.15 Resistencias inductivas de dispersión tomando en consideraciónla inclinación de las ranuras.El ángulo de inclinación.
γc = 360p/Z2 = (360)(2)/46 = 15,6°
Según la siguiente fórmula:
ε = V1N /(Iµ*x1)= 220/(5,12*1,1446)=37,25
De la Tabla 4-7
σck = 1.111, por lo tanto:
x1*σck = (1,1446)(1,11) = 1,272 ohm
x21*σck = (1,1309)(1,11) = 1,256 ohm
Adoptamos:
x1 = 1,272 ohm
x2 = 1,256 ohm
4.7 PÉRDIDAS EN EL ACERO Y PÉRDIDAS MECÁNICAS
4.7.1 Peso del yugo del estator
Gc = γ*hc*kc*l1*lcp(2p)*10-8
Gc =(7,8)(2,8)(0,95)(12,3)(20.6)(4)(10-8)
Gc = 21 kg.
4.7.2 Peso de los dientes del estator.
Gcz = γ*Z1*hz1*kbpcp*l1*kc*10-8

88
Miguel Ocharán P.a
Gcz = (7,8)(36)(2,55)(0,735)(12,3)(0,95)(10-8)
Gcz = 6.15 kg
4.7.3 Pérdidas principales en el acero del yugo del estator
Pcc = kπ*pcc*Gc*10-8
Pcc = (1,6)(5,87)(21)(10-8) = 0,197 kw.
Consideramos:
pcc = 5.87 (w/kg) para el acero E12 y para Bc= 11500 gauss
4.7.4 Pérdidas principales en el acero de los dientes del estator.
Pcz = kπ1*pcz*Gcz*10-8
Pcz = (1,8)(6,38)(6,15)( 10-8)
Pcz = 0.0706 kw.
Se ha considerado pcz = 6,38 (w/kg) para Bz1cp = 13 892 gauss
4.7.5 Pérdidas superficiales en los dientes del rotor.
rsup,p*710*2t
2mb2tpp2rsup,P −
δ
−τ= l
2
10001t*0B5,1
100001n*1Z
0k5,0rsup,p⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛=

89
Máquinas Asincronas - Estados Estable y Dinámico
de Tablas obtenemos:
ko = 2Bo = βokδBδ
por consiguiente:
Bo = (0,365)(1,22)(6003) = 2673 gaussβ0 se obtiene a partir de la relación:bm1/δ= 3,1/0,45 = 6,9 i βo = 0,365
como Z1 = 36,n1 = 1800t1 = 16,05 mmt2 = 12,50 mmbm2 = 1,50 mmp =2τp = 14,45lδ = 12,30 entonces, reemplazandopsup,r = 960 w/m2Psup,r = 0,060 kw.
4.7.6 Pérdidas por pulsación en los dientes del rotor.
8zpr,puls 10*G
2
1000r,pulsB2
10000
n*1Z14,0P −
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛=
gauss8575,12*2
45,0*4119042t2
0cp2zBB r,puls ==
δγ=
en consecuencia, como Gzp= 9,15
Ppuls,r = 0,0395 kw.

90
Miguel Ocharán P.a

91
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 5
LA MAQUINA ASINCRONA EN ESTADO ESTABLE
La transformación electromecánica de la energía sucede en una máquina asíncronaen todos los regímenes, excepto dos regímenes peculiares: el régimen de marchaen vacío y el régimen de cortocircuito. En el régimen de marcha en vacío lapotencia mecánica, desarrollada por el rotor Pmec=MΩ es igual a cero, por cuantola velocidad angular del rotor coincide con la velocidad angular del campo Ω = Ω1y el momento electromagnético M=0 En el régimen de cortocircuito la potenciamecánica es igual a cero. Por cuanto en este régimen el rotor esta fijo Ω = 0.
5.1 MARCHA EN VACÍO
En el régimen de marcha de vacío ideal debemos considerar lo siguiente:a) El momento exterior, aplicado al árbol de la maquina, es igual a cero (Mext
==0).b) No existe momento debido al rozamiento de las piezas giratorias.c) El rotor de la maquina gira con las misma velocidad angular que el campo
giratorio (Ω=Ω1)d) El deslizamiento es igual a cero (s==0);e) La f.e.m. y las corrientes del devanado del rotor no se inducen (I2 = 0), y,f) El momento electromagnético que equilibra el momento exterior y el momento
de las fuerzas rozamiento, es igual a cero(M=0).
El régimen de marcha en vacío de la máquina asíncrona es análogo a régimen demarcha en vacío del transformador.
El campo magnético se forma en este régimen solo por la corriente primaria, loque permite llamar la corriente de marcha en vacío corriente magnetizante (I1=I0).

92
Miguel Ocharán P.a
A diferencia del transformador el sistema de corrientes I0 en las fases del rebanadopolifasico del estator forma un campo magnético giratorio.
En virtud de la insignificante caída de tensión X1 Ýo y R1 Ýo la tensión Ù1 seequilibra casi totalmente por la f.e.m. Ë1 es decir Ù1 = -Ë1
En el cálculo del circuito magnético se cumple en el régimen de marcha en vacíocon el fin de determinar la corriente magnetizante en el devanado del estator I0 (ola f.m.m. F0), que origina el campo giratorio con el flujo magnético Øm que induceen el devanado del estator la f.r.m. prefijada
En el caso de circuito magnético no saturado las resistencias de las secciones deacero del circuito magnético son insignificantes y el campo en el entrehierro sedetermina principalmente por su propia resistencia magnética. Por esta razón, ladistribución de la inducción en el entrehierro repite la distribución sinusoidal delarmónico fundamental de la f.m.m.
La saturación de los dientes conduce a la distorsión del carácter sinusoidal de ladistribución dé la inducción en el entrehierro, que se manifiesta en forma deaplanamiento» de la curva en la zona de grandes f.m.m.
Una vez realizado el cálculo del circuito magnético y determinada la corriente envacío se puede hallar la resistencia principal del devanado del estator teniendo encuenta la saturación del circuito magnético.
5.2 MARCHA EN REGIMEN DE CARGA
Analicemos los procesos electromagnéticos estables en la máquina asíncronacargada para el caso de tensiones sinusoidales en el devanado del estator, queforman un sistema polifásico simétrico.
Para establecer las relaciones cuantitativas entre el momento exterior Mext., queactúa sobre el árbol del rotor, la velocidad angular del rotor Ω y las magnitudes delos circuitos eléctricos del estator y el rotor de la máquina (tensiones, corrientes ypotencias activas y reactivas) es necesario plantear un sistema de ecuaciones quedescriban los procesos electromagnéticos en los circuitos de los devanadospolifásicos del estator y el rotor.

93
Máquinas Asincronas - Estados Estable y Dinámico
Por cuanto todas las magnitudes de los circuitos eléctricos del estator y el rotorvarían con el tiempo, prácticamente en forma sinusoidal, este sistema de ecuacioneses más cómodo escribirlo en forma compleja. El análisis de los procesoselectromagnéticos en la máquina asíncrona se realiza con ayuda de un modeloque contiene para un periodo de su campo. asíncrona (las dimensiones deentrehierro) de las ranuras, los números de conductores efectivos en las ranuras,las corrientes en las ranuras, las tensiones en las espiras, los ángulos entrecualesquiera elementos del paso polar aumentan en p veces (donde p es el numerode periodos del campo de la propia maquina); la velocidad angular del campo esΩ1y la velocidad angular del rotor Ω aumentan en p veces y se hacenrespectivamente iguales a Ω1p = ω1p = ω1 y ω = Ωp; el deslizamientos y lasfrecuencias en los devanados del estator f1 y el rotor f2 se conservan. Con el finde simplificar en todas los pasos siguientes los circuitos magnéticos dentados delestator y el rotor del modelo de un solo periodo se representan lisos.
Las tensiones, las fem y las corrientes de las fases del estator deben satisfacer laecuación de las tensiones, la cual en forma compleja se escribe de la misma maneraque para el devanado primario del transformador.
U1+Et0+Et0=R1Id
Donde R1 es la resistencia óhmica de la fase del estator para la corriente defrecuencia f1,
Expresando E10 por medio de la corriente It se puede introducir en esta ecuaciónla resistencia de la fase del estator Z1:
U1 = -E1 + Z1I1
donde Z1 = R1 + jX1 es la resistencia de la fase del estator.
El valor y la dirección de la fem E1, inducida por el campo giratorio Bm se hanelegido de tal manera que para la tensión dada U1 la maquina funcione en elrégimen de motor con carga.
I1 = U1 + E1
Z1

94
Miguel Ocharán P.a
Para ello es necesario que la corriente de la fase esté retardada de la tensión U1en el ángulo φ1z<π/2 y la potencia activa P1= m1U1I1cosφ1 > 0 (se considerapositiva la potencia consumida de la red).
5.3 CARACTERISTICAS DE LA MAQUINA ASINCRONA
Las características de carga (tensiones y corrientes) de una máquina asíncrona,detalla gráficamente el sistema de ecuaciones que describen los fenómenos en loscircuitos eléctricos del estator y el rotor de la maquina asíncrona en estado estableo estacionario.(Ver figuras de 5.1 a 5.4).
El diagrama se construye en el plano complejo espacial respondiendo al modelo«de un solo periodo» y representa la unificación de los diagramas parciales decada componente. Todos los complejos giran en el diagrama con la velocidad elrotor y los ejes de las fases del rotor giran con la velocidad angular, el estator y losejes de las fases del estator se consideran inmóviles. Las magnitudes de fase delestator son las proyecciones de los respectivos complejos sobre los ejes de lasfases del rotor, con respecto a los cuales ellos giran con la velocidad.
Las magnitudes distribuidas en el espacio se obtienen proyectando los complejossobre los radios dirigidos hacia los puntos considerado del entrehierro.
Es más cómodo comenzar la construcción del diagrama por el complejo de lainducción que coinciden en dirección con los complejos. En este caso además dela amplitud de la inducción en el entrehierro se consideran dadas las frecuenciasde la corriente del estator la velocidad angular del rotor los parámetros y lascaracterísticas de imantación. Durante la construcción del diagrama se determinangráficamente todas las demás magnitudes de los circuitos eléctricos del estator yel rotor. Se muestra el diagrama para el régimen de motor. Su construcción serealiza en la sucesión siguiente:
Se fija una posición arbitraria para el complejo Bm.Se trazan los complejos Øm, Y1m, Y2m coincidentes en dirección con Bm. Elflujo Øm se calcula valiéndose de tomando en consideración el aplanamiento de lacurva de inducción
Se trazan lo complejos de la f.e.m E1 y de la f.e.m. E2 con un retardo de fase conrespecto a Φm igual al ángulo π/2.

95
Máquinas Asincronas - Estados Estable y Dinámico
Se determina el complejo de la corriente I2, que tiene un retraso de fase conrespecto a E2, igual al ángulo β2, y se construye el diagrama de tensiones del rotor.
Se calcula la corriente del rotor I2 reducida al estator.
Se determina el complejo de la corrientes I0.
Se halla el complejo de la corriente del estator I1.
Se construye el diagrama de tensiones del estator y se determinan la tensión de lared primaria U1, y el ángulo ϕ1 entre U1 y I1.
Por otro lado, las características electromecánicas de las máquinas asíncronas,pueden determinarse a prtir de los siguientes conceptos:a) La transformación de energía puede transcurrir en la máquina asíncrona en los
tres regímenes siguientes:Régimen de motor: 0 ≤s≤ 1,Régimen de generador: s ≤ 0Régimen de freno: s ≥ 1
Además tienen singular importancia dos regímenes característicos más defuncionamiento, en los cuales la transformación de energía no tiene lugar: marchade vacío ideal y régimen de cortocircuito.
5.4 ARRANQUE
Puesta en marcha de los motores asíncronos con rotor en cortocircuitoEl régimen de motor es el régimen en el cual se usan prácticamente todas lasmáquinas asíncronas, su uso como generador u otros regímenes posibles defuncionamiento es bastante escaso.
Todos los motores asíncronos se ponen en marcha independientemente, es decir,se aceleran desde el estado inmóvil hasta la velocidad angular próxima a la síncrona,venciendo el momento de resistencia de la carga.. Por lo tanto, esta condición dearranque debe de asegurarse de distintas maneras en los motores de distintostipos (variantes).
Los motores ordinariamente se ponen en marcha conectando directamente a lared la tensión nominal U1 = U1nom. El proceso de aceleración del rotor del motor

96
Miguel Ocharán P.a
desde el estado inmóvil (Ω = 0, s = 1) hasta la velocidad angular nominal Ω1nom sedetermina por su característica mecánica M = f (Ω) y la característica mecánicade la carga Mext = f (Ω).
La característica mecánica del motor representa la característica ideal del momentoal despreciar los armónicos superiores del campo; sin embargo sabemos que existeuna característica mecánica real, construida teniendo en cuenta la influencia delos armónicos superiores del campo.
Los momentos de rotación adicionales, relacionados con los armónicos superioresdel campo, ejercen una influencia notable en la marcha de la característica,disminuyendo el momento de rotación resultante a pequeñas velocidades derotación.
La marcha de la característica de la carga depende del tipo de máquina operadoraque se pone en movimiento. Generalmente el momento de rotación (en mayorgrado en los ventiladores y bombas y en menor grado en las máquinas herramienta).
Si permanece inmóvil el rotor (Ω = 0) el momento de arranque inicial del motorMarr es mayor que el momento |Mext|, requerido para poner en movimiento lamáquina ejecutiva, entonces conforme a la ecuación del movimiento donde J es elmomento de inercia de las piezas
dtdJMM extΩ
=+
en rotación, reducido al rotor, el rotor adquirirá cierta aceleración positiva dΩ/dt> 0 y comenzará a acelerarse. Este proceso sucederá hasta que la suma M + Mext,donde M > 0, y Mext < 0, se reduzca a cero. Esto tendrá lugar en el punto en el cualel motor funcionará en lo sucesivo en el régimen estacionario con un momento derotación nominal Mnom y con la velocidad angular nominal Ω’nom.
Para determinar el tiempo de arranque tarr hay que integran gráficamente
ext
nom
0arr MM
jdt+Ω
= ∫Ω

97
Máquinas Asincronas - Estados Estable y Dinámico
La integración se puede realizar también en forma numérica con ayuda de unacomputadora o d e algún modelo matemático adecuado para tal fin. El tiempo dearranque depende del momento de inercia de las piezas en rotación J y de la sumade los momentos M + Mext (o de la diferencia M - |Mext|). Este tiempo no es grande(se encuentra entre los límites de partes en cuenta que las corrientes I1 y I2 en losdevanados durante el arranque superan en muchas veces la corriente nominal (lacorriente de arranque inicial forma en unidades relativa I*arr = Iarr/I1nom = 5 … 7) y,como se ve en la figura, las corrientes disminuyen lentamente al aumentar elresbalamiento. Por eso cuando los momentos electromagnéticos soninsuficientemente grandes (y son pequeñas las diferencias M - |Mext|, cuando elproceso de arranque se demora, las temperaturas de los devanados pueden superarlos límites admisibles.
5.5 MÉTODOS DE REGULACIÓN DE LA FRECUENCIA DEROTACIÓN
Bajo el término de regulación se comprende la variación de la velocidad del rotorΩ, la cual se realiza actuando sobre el motor. En este caso se supone que lacaracterística mecánica de la carga durante la regulación permanente constante.Por cuanto la velocidad angular Ω = Ω1 (1 – s), existen dos posibilidades para suregulación: mediante la variación de la velocidad angular del campo magnéticoΩ1 y variando el resbalamiento s.
La variación de la velocidad angular Ω1 = 2πf1/p puede ser obtenida por tresmétodos:1) Variando la frecuencia de la corriente f;2) Variando el número de pares de polos p de los devanados del motor;3) Empleando el acoplamiento en cascada de dos máquinas asincrónicas.
La variación del deslizamiento puede ser alcanzado por distintos procedimientos,que se dividen en dos grupos:1) Los métodos con los cuales la potencia de deslizamiento sPe.m se desprende en
forma de calor en el circuito eléctrico del devanado del rotor (variación de latensión U1); introducción de una resistencia óhmica suplementaria R2 en elcircuito del rotor; introduciendo reactancias suplementarias en el circuito delrotor;
2) Métodos con los cuales la potencia de deslizamiento sPe.m se pierde sóloparcialmente en los circuitos eléctricos del rotor en forma de pérdidas m2I’2R2

98
Miguel Ocharán P.a
y en lo fundamental se usa útilmente (introducción de f.e.m. adicional deresbalamiento en el circuito del rotor con ayuda de acoplamientos en cascadaeléctricos o electromecánicos de la máquina asíncrona.
Existen dos métodos principales de regulación que pasamos someramente a listar:a) Regulación de la frecuencia de rotación variando la frecuencia de la corriente
f1.b) Regulación de la frecuencia de rotación variando el número de pares de polos
p del devanado del estator
5.6 CORRIENTE DE EXPULSIÓN.
Las inductancias de los elementos del conductor, que ocupan distinta posición porla altura de la ranura, resultan distintas, la inductancia del conductor situado máscerca del entrehierro es menor que la inductancia del conductor situado más cercadel fondo de la ranura. Por ello se explica el hecho de que por la anchura delconductor de la corriente se distribuye casi uniformente, mientras que lairregularidad de la distribución se manifiesta solamente por la altura de la sección.
En le caso de un solo conductor en la ranura, la mayor densidad de la corriente seobserva en los elementos del conductor situados en la proximidad del entrehierro(véase la curva de distribución de la densidad de la corriente en la figura 5.5). Ladensidad de la corriente en esta parte de la sección puede superar esencialmentela densidad media de la corriente en el conductor.
elemelemba
IJIJ ==0
Por la parte de la sección del conductor, hundida en la ranura, corre una parteinsignificante de la corriente. La sección útil del conductor disminuye, mientrasque la resistencia óhmmica aumenta.
El coeficiente 0/ RRKR = , es llamado coeficiente de aumento de la resistenciadel devanado a causa del efecto superficial (o coeficiente de Field).Dicho coeficientedepende solo de la altura y el número de conductores efectivos macizos por laaltura de la ranura y no depende de su anchura.

99
Máquinas Asincronas - Estados Estable y Dinámico
El problema de determinación de la resistencia óhmnica, así como la inductanciade dispersión del devanado, situado en las ranuras de forma rectangular, se haresuelto en los trabajos de A. Field, F. Ende, I, Sammers y en la forma más general,en el trabajo de T. G. Soroker. Todo este fenómeno que muestra desigualdad enlas densidades de corriente, de los elementos conductores, y por consiguiente enlas inductancias y resistencias ohmmicas de los devanados de acuerdo a la alturao profundidad en la ranura se denomina fenómeno de expulsión de la corriente.
En términos prácticos, por ejemplo en los rotores de jaula de ardilla, en que eldevanado rotórico son barras adosadas al rotor, se efectúa constructivamente unatransposición de posiciones, inclinando la posición de las barras, ello con el fin,entre otras cosas de compensar este fenómeno y en resumen, buscar que el campoelectromagnético sea lo más uniforme posible y se aproxime al modelo ideal.
La transposición en la parte de la ranura de cada espira del conductor efectivo seforma de dos barras, soldadas entre si por las cabezas, con la transposición completade los conductores elementales entre los limites de la longitud de la ranura. Laestructura de semejante barra permite que cada uno de los conductores elementales,al pasar de una capa a otra por la altura de la barra, ocupa todas las posicionesposibles en la barra, las inductancias de los conductores elementales en la barraefectiva resultan iguales a la corriente del conductor efectivo se distribuyen entretodos los conductores elementales de igual manera
baelem ccII /=
La irregularidad de distribución de la corriente se manifiesta solo entre los limitesdel conductor elemental dado Ella resulta mayor en las secciones de los conductoreselementales dispuestas en las zona del campo de dispersión más intensivo (esdecir, más cerca al entrehierro). No obstante, incluso en estas secciones de losconductores elementales la irregularidad de la distribución de la corriente resultaconsiderablemente menor que un conductor efectivo macizo. La densidad de lacorriente J en la periferia del conductor elemental se diferencia relativamentepoco de la densidad media de la corriente
elemelemelem baIJ =0
Por eso las perdidas en le conductor efectivo transpuesto resultan esencialmentemenores que en el macizo de la misma sección. El coeficiente RK puede ser

100
Miguel Ocharán P.a
calculado en este caso valiéndose de la particularidad de que el numero de
conductores elementales por la altura de la ranura es igual a acondelem cam µ= ,
donde condµ es el numero de conductores efectivos transpuestos por la altura de
la ranura (ordinariamente 2=condµ ).
Fig. 5.1 Características de trabajo del motor de jaula de ardilla A4-13 KW-220V enoperación nominal
Fig. 5.2. Relación coeficiente de corrección vs coeficiente de expulsión
0
0.2
0.40.6
0.8
1.0
COS
0
5
10
10
20
25
COS
S%
S
1
2
3
2 4 6 8 10 12 14 KW2nP P 2
00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.4
0.8
1.2
1.6
2.0
2.4
2.8
3.2
3.6
4.4
0.4 0.8 1.2 1.6 2.0 2.4 2.8 3.2 3.6 4.2 4.4 4.8 5.2

101
Máquinas Asincronas - Estados Estable y Dinámico
Fig. 5.3. Coeficientes de saturación de entrehierro vs densidad de flujo
Fig. 5.4. Gráfica I Estator, torque máximo vs deslizamiento
20 40 60 80 1000
0.3
0.4
0.5
0.6
0.7
0.8
0.3
1.0k
k =f(B )
BKgauss
0
40
80
120
160
0
0.5
1.5
1.0
2.0
1.0 0.8 0.6 0.4 0.2 0
s
M/MN
I1
M/MN(N)
I1(AMP)

102
Miguel Ocharán P.a
Fig. 5.5. Flujo de dispersión de la ranura del rotor de un motor de grande reactancia ydistribución de la intensidad de corriente en el conductor del rotor
b
1
2
a c
E E2 2
m
2
B0
A
C
l 2
bb

103
Máquinas Asincronas - Estados Estable y Dinámico
CAPÍTULO 6
CÁLCULOS TÉRMINOS EN MÁQUINAS ASÍNCRONAS
6.1 SOBRECALENTAMIENTOS, CÁLCULOS TÉRMICOS Y NORMAS
Cuando se realiza la transformación electromagnética de energía en la parte internade la máquina eléctrica, parte de esta energía se disipa en forma de pérdidas, lascuales calientan las diferentes partes de la máquina. Los flujos térmicos que segeneran debido a estas pérdidas se distribuyen desde los cuerpos de mayortemperatura hacia los cuerpos con menor temperatura y finalmente hacia el medioambiente.
Uno de los objetos del cálculo térmico es la determinación de los sobreelevacionesmedias de las temperaturas (sobrecalentamientos) de las partes activas de lamáquina y consiguientemente, la comparación de estas temperaturas medias sobreelevadas con los valores permisibles para una clase térmica de aislamientonormalizado utilizado en la fabricación de la máquina en estudio.
El sobrecalentamiento medio del devanado del estator, que se mide de acuerdo alas resistencias térmicas, no debe de sobrepasar los siguientes valores, a latemperatura normalizada de +40°C del medio ambiente, valor registrado por normasGOST 183-F4 para Rusia e IC411, según la Norma NEMA MG-1, parte 6 paraPerú. IEC 34-6).
CLASE TÉRMICA DE AISLAMIENTO A E B F H
SOBRECALENTAMIENTO PERMISIBLE
DEL DEVANADO DEL ESTATOR 60 75 80 100 125
TABLA 6-1

104
Miguel Ocharán P.a
Si el sobrecalentamiento del devanado del estator sobrepasa la temperaturapermisible en 10 a 12°C, entonces de tiempo de vida del aislamiento se reduce a lamitad aproximadamente.
Durante el diseño de máquinas eléctricas el cálculo de la sobreelevación de latemperatura nos permite controlar la permisividad y la aceptación de las cargaselectromagnéticas seleccionadas previamente.
En la manufactura moderna de las máquinas eléctricas cuando se construyemotores asíncronos se emplean materiales de aislamiento de acuerdo a los tiposde motores. Se emplea la clase térmica E para los motores de la serie A2, AD2 yotros, de la clase B y F para los motores 4A y otros, y de la clase H para motoresde destino especial.
Los motores de protección cerrada son los más fiables durante su explotación yoperación en comparación con los motores de protección por ventilación, ya quelos devanados de los motores de protección cerrada responden en el medio exterior.
Sin embargo sus condiciones de refrigeración son peores, sobre todo cuando setienen motores con carcasas cerradas de grandes potencias.
Es por eso que actualmente estos motores con protección cerrada y ventilaciónexterna se fabrican para potencia de hasta solamente 100 kW, sin embargo, latendencia es incrementar la potencia para estos motores de protección y ventilacióncerrada. Los procesos de transmisión térmica en los motores de protección cerradason más complejos que los motores de protección por ventilación externa y elestudio de estos procesos de transmisión térmica se han iniciado aproximadamentehace unos diez años.
Para nuestro caso particular Arequipa, Perú, estos motores responden a las normasde protección IP54, IP55.
Los métodos suficientemente exactos de cálculo térmico de motores cerradosempezaron a aparecer en los trabajos de investigación. Al momento no se disponede una bibliografía generalizada para este tipo de cálculos, por tanto, estos tipos decálculo se encuentran entre los de pleno desarrollo e investigación.
En el presente capítulo se ha sintetizado parte de la información bibliográficaexistente con el fin de cumplir con el objetivo de poder establecer, con un altogrado de precisión, los fenómenos térmicos asociados a las máquinas asíncronas

105
Máquinas Asincronas - Estados Estable y Dinámico
y extraer las conclusiones más valiosas para un correcto diseño y explotación deeste tipo de máquinas.
La metodología desarrollada en el presente capítulo esta orientada al cálculo de lasobreelevación media de la temperatura bajo un régimen continuo nominal defuncionamiento y en condiciones normales de operación. La temperatura del medioambiente se toma como la normalizada +40°C y la altura sobre el nivel del mar esno mayor a 1000 m., en primera instancia, y posteriormente evaluaremos los valoresde sobreelevación de temperatura para operación a la altitud de la ciudad deArequipa, estos es 2350 metros sobre el nivel del mar.
En cuanto al sobrecalentamiento del devanado cortocircuitado del rotor, dichovalor no se establece según las normas de manufactura electrotécnica, entoncesno vamos a desarrollar los cálculos correspondientes.
6.2TRANSMISIÓN TÉRMICA EN EL MOTOR ASÍNCRONOCERRADO
La transmisión térmica en el motor asíncrono cerrado y ventilado puede serrepresentada de acuerdo a sus partes principales y fundamentales.
Gracias a los esquemas o circuitos térmicos equivalentes, por ejemplo el que semuestra en la figura (6.1), se obtiene una mejor observación del circuito, en el quese detalla sus principales partes según el corte transversal del motor.
Las pérdidas en los diferentes elementos del motor se muestran en el circuito enforma en fuentes de calor concentradas.
Pn y PA Son pérdidas eléctricas en la ranura y en las partes laterales de la bobinadel devanado del estator respectivamente.
Pz y Pa Son las pérdidas magnéticas en los dientes y el yugo del estator.P p Son pérdidas en el rotor que incluyen las pérdidas en el devanado y
adicionales de los dientes, respectivamente.Pf Son las pérdidas internas de ventilación debido a la distribución del aire
por los alabes del rotor.P Son las pérdidas por fricción en los rodamientos.
Los puntos de recorrido del flujo térmico desde los lugares de generación haciatodos los cuerpos que lo rodean se muestran en los circuitos equivalentes térmicos

106
Miguel Ocharán P.a
como conductancias térmicas que vamos a designar como λ o también comoresistencias térmicas R = 1/∧.
En el sistema de refrigeración del motor asíncrono tipo cerrado, la carcasa juegaun papel de intercambiador térmico, esta carcasa toma todos los flujos térmicosde las partes activas del motor y las trasmite hacia el medio ambiente por conveccióny generalmente por radiación.
La transmisión térmica de la carcasa se considera en los circuitos térmicosequivalentes por dos conductancias de calor.
λ’° - desde la parte media del grosor de la carcasa.
λ»° - desde las capas laterales y las partes finales de la carcasa.
El calor entra a la carcasa desde las partes activas por dos caminos principales:
1°.Parte de las pérdidas en el devanado del estator se transmiten hacia los dientesdel aislamiento de ranura (resistencia térmica Rn); así mismo a través del entrehierro ingresan parte de las pérdidas del rotor (resistencia Rδ). El flujo térmicopasa hacia la carcasa a través de la resistencia de los dientes Rz (parcialmentey a través del estator de la resistencia térmica del yugo del estator Rt) y delentrehierro entre el núcleo y la carcasa, lo que es representado por la resistenciaR∆. Además conforme el flujo térmico se va conduciendo hacia la carcasa, seadicionan las pérdidas en los dientes y en el yugo del estator. La transmisión decalor aquí sucede debido a la conducción térmica.
2°.Otra parte de las pérdidas del estator y rotor pasan desde las superficies de laspartes laterales de los devanados del estator y desde los anillos de la parte dela jaula de ardilla del rotor hacia el aire interno, estos fenómenos estánrepresentados por las resistencias (térmicas Rsf y Rpf); el paso de las pérdidasdel aire está representado por Pf, la misma que se transmite hacia la superficieinterna de la carcasa, (tal resistencia está representada por Rk). La transmisióntérmica sucede aquí debido a la convección.

107
Máquinas Asincronas - Estados Estable y Dinámico
FIGURA 6.1. Circuitos de distribución de los flujos térmicos en el motor asíncrono tipocerrado, ventilado, de refrigeración interna.
La irradiación térmica por ambos caminos sucede con diferentes efectividades,como resultado surge la desuniformidad de calentamiento de los devanados y dela carcasa a todo lo largo del estator.
Eso conlleva al equilibrio de flujos térmicos a lo largo de los devanados y de lacarcasa, cuyos caminos y puntos de paso del flujo térmico se muestran en elesquema de resistencia, Rm y Rcm.
En la Figura 6.2. se muestra la distribución experimental de la sobre elevación detemperatura sobre la temperatura del medio ambiente a lo largo de toda la carcasa,(la representación es θcm), así como del devanado del estator y del rotor, para unmotor en régimen estable de funcionamiento.
Este carácter de distribución de los sobrecalentamientos viene a ser típico paralos motores tipo cerrado, con ventilación interna y con valores de potencia dehasta los 30 ó 40 Kw. En tales máquinas se tiene como regla común que laresistencia térmica según el primer camino del flujo térmico descrito es menorque a la del segundo camino. Debido a esa condición tenemos un menor
P
P P P
PIH
PP
CZ
CC
RR
RR
RR
faf
k
R
R
M
nn
c
z
Rpf
PAR
cmo
o

108
Miguel Ocharán P.a
recalentamiento de las ranuras del devanado del estator en relación con elcalentamiento medio de las partes laterales del mismo.
Así mismo la sobreelevación de la densidad del flujo térmico, el cual se conduce através del grosor medio de la carcasa, condiciona o genera la tendencia de lacurva θ cm.
La asimetría de las curvas de distribución del sobre calentamiento se genera porla distribución en uno de los lados del ventilador de la ventilación forzada.
Además, se puede considerar en el cálculo térmico, el efecto de la asimetría de larefrigeración de la carcasa sobre la distribución del calentamiento, a lo largo deldevanado del estator, si es que trazamos un «esquema» o «circuito térmicoequivalente», para todo el corte transversal del motor, tal como se muestra en laFigura 6.2, el mismo que se construye a partir del esquema de la Figura 6.1.
Sin embargo, para el cálculo de la sobreelevación media de la temperatura deldevanado es suficiente tomar por base un esquema asimétrico más simple, comose trazó en la Figura 6.1.
Figura 6.2. Distribución de los calentamientos medios a lo largo de la longitud del motortipo 4A-132M-6.
20
40
60
80
100

109
Máquinas Asincronas - Estados Estable y Dinámico
6.3 CONCEPTOS BÁSICOS Y LEYES QUE SE REFIEREN A LOS CIRCUITOS TÉRMICOS EQUIVALENTES
Los circuitos térmicos equivalentes nos permiten obtener relaciones cuantitativasentre las pérdidas de las máquinas eléctricas, los flujos térmicos producidas enéstas y los calentamientos o recalentamientos de sus partes.
Como elemento de la máquina o parte de la misma, en el cálculo térmico se entiendecomo una parte generalmente homogénea que esta caracterizada por condicionesdeterminadas de conducción o intercambio de calor y que se diferencian paracada una de las partes de la máquina.
Cada parte de la máquina se debe representar en el circuito térmico equivalenteen forma de un nodo. En el nodo se ubica también la fuente de calor que es iguala la presente en este elemento o parte.
Algunos nodos pueden no tener fuentes de calor, por ejemplo la carcasa. Cadanodo del circuito equivalente térmico tiene un calentamiento, el cual es igual a lasobre elevación media de la temperatura del intercambio de calor, lo cual se puedeexpresar con un determinado grado de precisión, que corresponde al elemento decalor sobre la temperatura del medio ambiente.
Por las ramas del circuito térmico equivalente que conectan los nodos entre sí,recorren los flujos térmicos correspondientes.
Se denomina flujo térmico (Q) a la cantidad de energía térmica que se transportadesde un elemento o parte de la máquina hasta otro elemento o parte vecina de lamáquina en la unidad de tiempo.
Q tiene las mismas unidades que la potencia. De la ley de conducción térmica (laecuación De Fourier); y de la fórmula de Newton-Ripsman para la transmisióntérmica por convección y por irradiación, el flujo térmico que está orientado desdeuna parte o elemento hasta otra parte o elemento, es proporcional a la diferenciade temperatura o a la caída de temperatura entre ambos elementos.
Q = (θ1-θ2)λ = (θ1-θ2)/R (6.1)
Además, la diferencia:
∆θ = (θ1-θ2)

110
Miguel Ocharán P.a
Se denomina generalmente caída de temperatura.
La ecuación (6-1) se denomina Ley de Ohm para circuitos térmicos, tal como oen forma análoga a la de los circuitos eléctricos.
Con ello Q es análoga a la corriente y la caída de temperatura ∆θ es análoga a lacaída de tensión eléctrica.
La resistencia térmica R, cuando se realiza la transmisión de calor a través de unapared plana, de grosor ∆1 y de sección Sc, sobre la base de las ecuaciones deFourier se puede expresar de acuerdo a la siguiente fórmula:
Sc1R
λ∆
=
(6-2)
Donde λ: factor de conductancia térmica durante la transmisión de calor desde lasuperficie hasta un gas o un líquido (así mismo en sentido contrario), la expresiónpara determinar se obtiene de la fórmula de Newton-Ripsman.
S1R
α∆
= (3-3)
Para α: factor de transmisión térmica.
En caso de tener una configuración o estructura compleja de elementos en lamáquina eléctrica, la distribución de las pérdidas por unidad de volumen de uncampo de temperatura de dos o tres dimensiones, las fórmulas para las resistenciastérmicas, para determinar las resistencias térmicas que tienen una configuraciónmás completa, sin embargo tienen como base, la misma estructura como lasecuaciones (6-2) y (6-3).
Para cada elemento de la máquina y respectivamente para cada nodo del circuitoequivalente térmico, se pueden obtener una ecuación de balance térmico de acuerdoal siguiente principio:
«La suma algebraica de los flujos térmicos en las ramas del circuito térmicoequivalente que salen a partir de un nodo, en un régimen térmico estable, es iguala la potencia de las fuentes de calor o las fuentes térmicas en este nodo».

111
Máquinas Asincronas - Estados Estable y Dinámico
Por ejemplo para el nodo 1, que está conectado con los nodos 2,3 y 4; la ecuaciónde balance térmico va a tener la siguiente forma:
P1 = Q12 + Q13 + Q14 (6-4)
Donde Q1; son los flujos térmicos en las ramas, según el esquema, que conectanel nodo 1 con los demás nodos (j = 2,3,4).
El flujo térmico que está orientado desde el nodo analizado se considera positivo yel que está orientado hacia el nodo negativo.
La ecuación de balance térmico y la ley de Ohm están desarrolladas sobre la basedel cálculo de circuitos térmicos equivalentes.
Analizando, tal como si fuera un circuito eléctrico, se pueden reemplazar: las fuentesde calor por fuentes de corriente, conectadas hacia los nodos, los flujos térmicospor corrientes y las temperaturas por potenciales eléctricos.
Entonces la ecuación del balance térmico puede ser denominada como la primeraley de Kirchoff para circuitos térmicos equivalentes.
La segunda ley de Kirchoff para circuitos térmicos equivalentes, puede serestablecida de la siguiente manera: «la suma algebraica de las caídas detemperatura (∆θ = QR) en una malla cerrada es igual a cero», por cuanto en elcircuito térmico equivalente no se tienen elementos análogos a las fuerzaselectromotrices.
Gracias a la analogía entre las leyes de los circuitos eléctricos y los circuitostérmicos, se pueden emplear todos los métodos que se emplean para solucionarlos circuitos eléctricos de corriente continua.
Los circuitos térmicos equivalentes de las máquinas eléctricas que son refrigeradaspor medio de ventilación, se pueden considerar lineales, por cuanto sus resistenciastérmicas casi no están en función de las temperaturas.
Debe hacerse notar que una de las finalidades del cálculo de los circuitos térmicosequivalentes es la determinación de la sobreelevación de la temperatura.

112
Miguel Ocharán P.a
6.4 CIRCUITO TÉRMICO EQUIVALENTE DEL MOTOR ASÍNCRONO TIPO CERRADO
El circuito térmico equivalente que se muestra en la Figura 6-1, sirve principalmentecomo esquema característico cualitativo del proceso de transmisión térmica.
Para realizar el cálculo térmico se ha desarrollado un circuito más completo, talcomo se pude ver en le Figura 3. Los nodos de este circuito se simbolizan consubíndices numéricos, para una mayor comodidad:
0 = Medio ambiente (atmósfera).1 = Devanado del estator.2 = Rotor (El devanado y el núcleo se toman en cuenta como un solo elemento,
por cuanto el devanado del rotor no está aislado).3 = Dientes del estator.4 = Yugo del estator.5 = Aire interno6 = Parte de la carcasa que esta en contacto con el estator.7 = Todas las demás partes de la carcasa y las tapas laterales que cubren la
máquina asíncrona.
Los flujos de calor térmico en la rama del circuito equivalente térmico dadocorresponden principalmente al circuito equivalente térmico de la Figura 6.1. Ladiferencia entre ambos circuitos térmicos equivalentes es de que las partes de lasranuras y de la parte frontal del estator se juntan en un solo elemento, donde seconsidera que prácticamente se puede eliminar el error al no considerar las juntaso uniones, gracias al método de cálculo de las resistencias térmicas Ra y Rλ.
En la metodología de cálculo propuesto en comparación a la metodología de cálculode máquinas de alta protección, para la determinación de la sobreelevación de latemperatura de las partes activas con respecto al elemento cero, es necesarioagregar adicionalmente el calentamiento del flujo del aire refrigerante, ya que aquícontribuye en la caída de temperatura en las resistencia R’o y R»o. Estasimplificación sólo es permisible con máquinas con una resistencia de refrigeraciónexterna.

113
Máquinas Asincronas - Estados Estable y Dinámico
Figura 6.3. Circuito térmico equivalente del motor asíncrono tipo cerrado
P1R12 1 R13
2 3
P21R´13
P31
0
R´o R"o
RcmP76
R´∆
7
P44
3
Rf
P3R´n
P1 P5
P2
Rn
Rk
5
2
1
R´δ Rpδ ∆
Figura 6.4. Transformación de un nodo con dos ramas

114
Miguel Ocharán P.a
6.5 MÉTODO DE CÁLCULO DE CIRCUITOS EQUIVALENTES TÉRMICOS
6.5.1. Método general de cálculoSi tenemos un circuito equivalente térmico que tiene «m» nodos, los cuales
están simbolizados por subíndices K(1 ≤ K ≤ m); además de ello, se tiene unelemento denominado nodo cero cuyo recalentamiento es θo = 0. Si además, setoma en cuenta uno de los nodos K con un valor concreto y para ese nodoescribimos la ecuación de balance térmico, expresando los flujos térmicos conayuda de la ley de Ohm, a través de los recalentamientos del nodo dado (θk) y delos demás nodos (θ1); k = i y θo.
Si, finalmente a la conductancia térmica entre los nodos i, y todos los demás nodos,las simbolizamos respectivamente como λik y λio. (Si entre los nodos existe unaconexión directa la conductancia térmica entre estas va a ser cero), entonces laexpresión general para la ecuación del balance térmico será:
( )ki
m
lklk
θ−θ∑≠=
(6-5)
Donde Pi es la potencia de la fuente de calor en el nodo i.
Si reagrupamos los términos de la ecuación 6-5 e igualamos θo = θ e introducimos.
0iik
m
lklk
ii λ+λλ ∑≠= (6-6)
Que viene a ser la conductancia térmica propia del nodo i – que es igual a la sumade todos las conductancias que ingresan al nodo -, entonces como forma final dela ecuación de balance térmico tendremos:
iikik
m
lklk
iii P=θλλθ ∑≠= (6-7)
Donde θi y θk son sobrecalentamientos desconocidos.

115
Máquinas Asincronas - Estados Estable y Dinámico
Dando valores de subíndice i, en forma ordenada desde 1 hasta m, y escribiendolas ecuaciones de balance térmico para todos los nodos, tenemos un sistema de mecuaciones, con un número de incógnitas igual a m también.
El sistema de ecuaciones lineales algebraica obtenido tiende a ser de primer ordeny puede ser solucionado por cualquier método existente de solución.
El método de cálculo de los circuitos térmicos equivalentes es análogo al métodode nodos empleados para la solución de circuitos eléctricos.
6.5.2.Método de Transposición (Método de Conversión)La transposición del circuito térmico equivalente está basada en la secuencia
de simplificación del número de nodos. Sobre la base del método de transposición,tenemos obtenemos la solución del sistema de ecuación (6-7).
Si escribimos el sobrecalentamiento θi y lo expresamos con la ayuda de la ecuaciónde balance térmico para el nodo i, obtenemos
ii
ikk
m
lklkii
ii
Pλλ
θ+λ
=θ ∑≠= (6-8)
Y si reemplazamos en las demás ecuaciones del sistema, lo mismo que acabamosde señalar, obtenemos como resultado un nuevo sistema, en que el número deincógnitas es igual al anterior en menos una.El nuevo sistema de ecuaciones corresponde a un nuevo circuito térmicoequivalente en el cual se excluye el nodo i.
Se puede demostrar que en el nuevo circuito térmico equivalente las fuentes decalor o las fuentes térmicas de los nodos restantes k y las conductancias térmicasentre ellos se obtienen por medio de las diferencias.
ii
ikii PPλλ
=∆ (6-9)
ii
ivikvk λλ
λ=λ∆ (6-10)
Donde v: índice de uno de los nodos de cualquiera de los nodos k.

116
Miguel Ocharán P.a
Luego de realizar las transformaciones pueden aparecer conductancias térmicasentre nodos, los cuales antes no estaban conectados.
Realizando una operación secuencial de simplificación del número de nodos,secuencia en que se puede disminuir hasta cualquier valor deseado, en que elcálculo del circuito térmico equivalente va ha ser lo suficientemente simple, yefectuando el cálculo del circuito obtenido, finalmente, se puede hallar los sobrecalentamientos de todos los nodos excluidos utilizando siempre la fórmula (6-8).
El método de transformación es viable utilizarlo para nodos con un número pequeñode conductancias, especialmente para nodos con fuentes de calor y dosconductancias.
Por ejemplo en la Figura 6-4 se muestra una parte del circuito térmico equivalentecon este nuevo resultado (antes y después de la transformación). Para ello, enlugar de las conductancias λ es mejor emplear la resistencia térmica R.
De acuerdo a la ecuación (6-9) tenemos:
1312
131
1312
121
1312
12121 RR
RP
R1
R1
R1
PPP+
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+=
λ+λλ
= (6-11)
en forma análoga:
2111312
12131 PP
RRRPP −=+
= (6-12)
Estas potencias se aumentan respectivamente a las fuentes térmicas de los nodos2 y 3.
De acuerdo a la ecuación (6-10) tenemos:
131213121312
1312
23
'23 RR111R +=
λ+
λ=
λ−λλ+λ
=λ∆
= (6-13)

117
Máquinas Asincronas - Estados Estable y Dinámico
Esto quiere decir que la transformación conlleva a una suma de resistencias enserie simple.
Además notamos que las resistencias R’12 y R13 pueden constar de una cantidadcualquiera de resistencias en serie.
Además de las transformaciones analizadas, en los circuitos térmicos equivalentesse pueden emplear en reemplazo de resistencias en paralelo una equivalente, latransformación triángulo – estrella, etc.; asimismo se pueden emplear las diferentestécnicas de transformación de resistencias y conductancias empleadas en los análisisde los circuitos eléctricos.
6.6 METODOLOGÍA DE CÁLCULO TÉRMICO
6.6.1.Cálculo de las fuentes de calor
a) Datos iniciales para el cálculo de las fuentes de calorDe acuerdo a la simbología empleada en el cálculo electromagnético, vamos a
tomar como datos iniciales las siguientes magnitudes:• Pn(Kw) : Potencia nominal• P : Número par de polos del motor• η : Eficiencia del motor• I1N : Corriente nominal de fase del estator• I’2N : Corriente del rotor referida al estator en un régimen nominal• r1 : Resistencia de fase del devanado del estator para una
temperatura de funcionamiento de 75°C para un tipo deaislamiento B.
• r’2 : Resistencia del devanado del rotor referida al devanado delestator considerado la misma temperatura y clase de aislamientovistas para r1
• Pcc(Kw) : Pérdidas principales en el acero del yugo del estator.• Pcz(Kw) : Pérdidas principales en los dientes del yugo del estator.• Pmax (Kw): Pérdidas mecánicas
b) Las pérdidas adicionales en el cálculo térmico se determinan gracias alfactor kg, cuyos valores se muestran en la Tabla 6.2.

118
Miguel Ocharán P.a
# par de polos 1 2 3 4 a +
Kg para P < 30 kW 0.03 0.02 0.025 0.03
Kg para P > 30 kW 0.02 0.015 0.020 0.025
TABLA 6.2
Pg = kgPn * 10-3/η (6-14)
a) Resistencias eléctricas corregidasLas resistencias eléctricas de los devanados deben ser referidas a sutemperatura real cuando el motor está operando en su régimen nominal y estable.Sin embargo, por cuanto esta temperatura no es conocida antes de realizar elcálculo térmico o antes de realizar las experiencias para determinar elcalentamiento de la máquina, entonces se puede determinar aproximadamenteel calentamiento permanente del devanado del estator (Ver Tabla 6.1),considerando además el recalentamiento del devanado en 20%.
La temperatura del medio ambiente en el laboratorio se puede tomar como20°C. De esta forma las resistencias, referidas a la temperatura de losdevanados cuando el motor está en plena operación, son iguales a:
( ) ( ) 75235020235r
75235020235rr lm0
C1151lm
C7510
10 +++
=+++
= °° (6-15)
y
( ) ( ) 7524520.120245r
7524520.120245'rr lm1
C1152lm
C752020 +
++=
+++
= °° (6-16)
b) Pérdidas (Fuentes de Calor)
••••• Pérdidas en el devanado del estator (w)
P1 = 3I²1Nr10 (6-17)

119
Máquinas Asincronas - Estados Estable y Dinámico
••••• Pérdidas en el rotor, en los dientes y en el yugo del estator
P2 = 3(I²2N)² r¹20 + 0.5 Pg
P3 = Pca . 10³ + 0.5 Pg
P4 = Pcc . 10³
••••• La distribución aproximada de las pérdidas mecánicas en el circuitoequivalente térmico es:
P5 = P7 = Pmax . 10³/3 (6-19)
••••• Las pérdidas totales son (w)
P∑ = P1 + P2 + P3 + P4 + P5 + P7 (6-20)
6.6.2 Cálculo de las Resistencias Térmicas
a) Datos inicialesLos datos iniciales para el cálculo de las resistencias térmicas del circuito térmicoequivalente se toman del cálculo del circuito electromagnético considerando lamisma simbología utilizada en ese proceso, así como los datos contenidos enlos planos de diseño del motor o de los planos de dibujo antes de la construccióndel mismo; todas las dimensiones deben expresarse en centímetros. Debenconsiderarse:
• n (rpm) : Cantidad de revoluciones por minuto (nominal)
• z1 : Número de dientes del estator
• δ¹,∂ : Ancho máximo y mínimo de la ranura del estator de formatrapezoidal de acuerdo a la Figura 6-4.
• hn : Altura de la ranura del estator (sin estrías)
• d : Diámetro del conductor desnudo.
• dµ3 : Diámetro del conductor aislado.
• nn : Número total de conductores por ranura
• ∆µ : Grosor del aislamiento de ranuras por uno de los lados.

120
Miguel Ocharán P.a
• HKA : Altura de las cuñas que tapan las partes activas del devanadodel estator
• LB1 : Longitud de la parte frontal del devanado del estator
• Kc = 0.75 : Factor de relleno del acero del núcleo del estator
La cantidad de aletas de ventilación en la carcasa del motor es Np = 20 parauna altura normalizada H y una longitud normalizada Ip.
*N’p = 6, cuando se tiene una longitud Hp y una longitud disminuida L’p juntocon la posición de la capa de bornes, etc.
Hpm = 4 cuando se tiene una altura del eje Hpm disminuida (altura media)distribuida entre las tapas.
do : grosor de la aleta en la base.
Todas las demás dimensiones se toman de acuerdo a la Figura 6.5. Lasdimensiones que se muestran con asterisco no se toman como datos iniciales,por cuanto dichos valores son seleccionados durante la construcción del motor,tomando en cuenta las consideraciones y recomendaciones pertinentes.
Durante la construcción del sistema de ventilación y la toma de los datos inicialespara el cálculo térmico se pueden obtener datos característicos de acuerdo alas recomendaciones para la fabricación de motores asíncronos de la serie 4A,las cuales se detallan a continuación:
Altura de eje de giro H (mm)
Hp/Dcm γ δo/hp Material Carcasa
∆µ (cm)
Clase Aislamiento
71.80 De 10° De 0.02 90 0.100 a 0.18 a 100 0.115 9° 0.20
Aleación con aluminio
112 De 0.19 a Hierro dulce 0.025 B 132 De De 0.22 160,180 0.083 a 7° a 200,225,250 0.092 8° 0.22-0.26 0.04 F
TABLA 6.3

121
Máquinas Asincronas - Estados Estable y Dinámico
El diámetro de ventilador Dp = Dcm y el número de aletas NA = 8 para todos losmotores, con excepción de aquellos en los cuales Dp = (0.85-0.90) Dcm y NA =6, para este caso además el ancho de las aletas es dA = Dd/4.
El diámetro de la protección externa de la carcasa responde a la fórmula:
DK = Dcm + 2hp + (0.1-0.5), (6-21)
Como dato de entrada el diámetro Da = 0.8 Dcm
La dimensión kK es aproximadamente (1.5 – 2) hp
El grosor en su parte extrema es de (0.6 – 0.78) do
El radio de giro en la base de la aleta es de 3-5 mm
Durante la selección de las dimensiones éstas se redondean hasta valoresenteros en milímetros, las dimensiones de la sección de la aleta hasta en 0.5mm.
El ángulo γ se selecciona de tal forma que el ancho de los canales entre lasaletas será igual para toda la superficie. Luego se calcula el número de aletas,Np, N’p y NPM.
Partes del motor Materiales Denominación Conductividad (w/cm°C)
Carcasa Hierro dulce Aluminio Aleación
λcm λcm λcm
0.5 0.5 1.5
Núcleo del estator Acero-silicio Tipo E11 y E12 Tipo E21 y E22 Tipo E0 - 100 Tipo E0 – 300
λfe λfe λfe λfe λfe
0.36 0.23 0.41 0.15
Devanado del estator Aislamiento ranura Clase E Clase B y F Barniz impregnado Cobre
λu λu λu λu λu
0.0013 0.0016 0.0011 3.8
TABLA 6.4. Coeficientes de conductividad térmica de los materiales

122
Miguel Ocharán P.a
Fig.
6.5
. Mot
or as
íncr
ono
con
roto
r tip
o ja
ula d
e ard
illa 1
3KW
, ser
ie 4
A C
orte
-Sec
ción
long
itudi
nal y
dim
ensi
ones
27,1
0
21,9
0
11,4
5
4,00
12,3
07,
40
29,1
18,4
36,831,3
24,15
7.5º
1,10 2,8
18

123
Máquinas Asincronas - Estados Estable y Dinámico
b) Determinación de Parámetros
b1) Area de la superficie lisa de la carcasa y de las tapas laterales sin considerarlos canales y las aletas de refrigeración.
SrA = πDcm (Lcm + 0.5 Dcm + 1.5 hµf) (6-22)
b2) Area de la superficie de las aletas
pPMPMp'p
p
'p
p LhNhNLL
N2Sp⎥⎥⎦
⎤
⎢⎢⎣
⎡+⎟
⎟⎠
⎞⎜⎜⎝
⎛+= (6-23)
b3) Area ocupada por las aletas
p
opop h
S57.0S
δ= (6-24)
b4) Area de la superficie de las tapas y todos los demás elementos que setienen en la carcasa.
Snp = 0.63 DcmLcm (6-25)
b5) Paso entre aletas (cm)
Kp = πDcmγ/360 (6-26)
b6) Area entre canales de las aletas
( )p
opnppgk h2
tS075SS
δ+= (6-27)
b7) Velocidad de giro del ventilador (m/s)
vδ = πDδnH * 10-2/60 (6-28)

124
Miguel Ocharán P.a
b8) Velocidad media de absorción del aire de refrigeración de la carcasa
( )cmcm
cmocp DL
Dvv += δ (6-29)
b9) Factor de intercambio de calor para las partes sin aletas y que no sonsuprficies corrugadas en las aletas
33.0
cm
6.0cp
Hp 10xvv
8.53.1 −
⎟⎟⎠
⎞⎜⎜⎝
⎛+=α (6-30)
b10) Factor de intercambio de calor de la superficie corrugada de la carcasa
3p
p
Hpop
th21
05.1
+
α=α
(6-31)
b11) Factor de efectividad de la aleta
cmo
op2p
p h431
1K
λδ
α+
= (6-32)
b12) Conductividad térmica de la carcasa del motor hacia el medio ambiente
λo = αHh (Sca – Sop – Sgk) + αop (kpSp + Sgk + Snp) (6-33)
b13) Resistencia térmica desde la parte media de la carcasa hacia el medioambiente
⎟⎠⎞
⎜⎝⎛ +
λ=
3DL
l1R cm
cmo
'o (6-34)

125
Máquinas Asincronas - Estados Estable y Dinámico
b14) Resistencia térmica desde las partes extremas de la carcasa hacia el medioambiente
'o
o
"o
Rl
1R−λ
= (6-35)
b15) Area de la sección de la carcasa
Scm = 1.1π(Dcm - hcm)hcm + 0.7 (Np + N’p)hpδo (6-36)
B16) Resistencia térmica axial de la carcasa
( )cmcm
cmcm S12
LR λ= (6-37)
b17) Resistencia térmica del entrehierro entre el núcleo del estator y la carcasa
lDD11.045.1
Ra
g
π
+=Λ (6-38)
b18) Resistencia térmica del yugo del estator
( ) fecaa
aC lkhD
hRλ−π
= (6-39)
b19) Resistencia térmica de los dientes del estator
fecZcp1
nZ lkZ
hRλδ
= (6-40)
b20) Resistencias del circuito térmico equivalente para el flujo térmico que seconduce por el núcleo del estator
R’A = RA + 0.5 RC RF = 0.5 RC + 0.3 RZ (6-41)

126
Miguel Ocharán P.a
B21) Perímetro de la ranura trapezoidal del estator
π = 2hn + δ’ – 2hka – 10 Aµ (6-42)
B22) Resistencia térmica del aislamiento de ranura
⎟⎟⎠
⎞⎜⎜⎝
⎛λ
+λµµ∆
Π=µ A
02.0lZ
1R n (6-43)
B23) Coeficiente equivalente de conductividad térmica del flujo, del paquete deaislamiento de los conductores por ranura, en forma transversal a losconductores
λ3 = 0.0421 + 0.164 dµ1² (6-44)
B24) Coeficiente de forma de ranura
ε = (δ’ + δ)/(4hµ - δ) (6-45)
B25) Resistencia térmica del aislamiento de conductores por ranura
( )δ−
ε−ε=n
3n h45.01R (6-46)
B26) Area de la sección de cobre del devanado del estator
²dnZ4
S k1Mπ
= (6-47)
B27) Resistencia térmica resultante entre el devanado y el núcleo del estator
( )1AcuM
21A
3nnM 11S0531.0RRR
+λ++= (6-48)

127
Máquinas Asincronas - Estados Estable y Dinámico
B28) Area de la superficie de refrigeración de las partes laterales del estator
( )[ ]zcpn13nA hZkh4.1D141S δ−++= (6-49)
El coeficiente kξ para motores de la serie 4 A de 2,4,6 y 8 polos es 0,05;0,09; 0,10 y 0,11 respectivamente.
B29) Velocidad del rotor (m/s)
6010nDv
2Mp
p
−+π= (6-50)
B30) Factor de intercambio de calor de las superficies de las partes laterales
( ) 3
a
8.0pp 10*
DDv
7.31 −Λ
⎥⎥⎦
⎤
⎢⎢⎣
⎡+=α (6-51)
B31) Resistencia térmica desde el devanado del estator hacia el aire interno delmotor
P1lR5.1
S1R
Ai
np
AAA +
α= (6-52)
B32) Area de la sección de la superficie interna libre de la carcasa
⎟⎠⎞
⎜⎝⎛ ++−
π= µ2
Dh1LDS a1cmaK (6-53)
B33) Resistencia térmica desde el aire interno a la superficie de la carcasa
( )kAK S8.0
1R α= (6-54)

128
Miguel Ocharán P.a
6.7 CÁLCULO DEL CIRCUITO TÉRMICO EQUIVALENTE (CTE)
La finalidad del circuito térmico equivalente es determinar la sobre elevación mediade la temperatura del estator θr.
El circuito equivalente térmico, del motor asíncrono de protección cerrada, semuestra en la Figura 6.3 y se calcula utilizando los métodos propuestos en el punto6.6.
El cálculo se inicia excluyendo el nodo 2 (del rotor), el cual puede ser calculadopor un método simplificado gracias a que las resistencias R’d y Rp prácticamenteson pequeñas y no afectan el recalentamiento del devanado del estator, así pues,también la exclusión de las pérdidas P2 entre los nodos 3 y 5, cuando se excluye elnodo 2, también son casi no considerables, y éstas se pueden considerarproporcional a la relación entre 1 y D del motor.
a) Potencia de las fuentes 3 y 5 luego de excluir el nodo 2.
P’3 = P3 + P2l/(1+D) (6-55)
y
P’5= P5+ P2 P2l/(1+D) (6-56)
b) Conversión del triángulo 6-7-0 en estrellab) Resistencia total de los lados del triángulo 6-7-0
RT = R’o + R»o + Rc (6-57)
b2) Resistencia de los radios de la estrella
Para el nodo 0 : Ro = R’o R»o/RT (6-58)
Para el nodo 6 : R1 = R’o Rcm/RT (6-59)
Para el nodo 7 : R2 = R»o Rcm/RT (6-60)
El esquema que se obtiene luego de realizar las respectivas transformacionesse muestra en la Figura 6-6.

129
Máquinas Asincronas - Estados Estable y Dinámico
Para seguir realizando las transformaciones en el circuito térmico equivalentese tiene que excluir las fuentes de calor 3,4,5 y 7 y como resultado de esto, laspérdidas van a concentrarse en el nodo 1. (P’1) y en el centro de la estrella 6-7-0 (P∑ P’1), entre las cuales se encuentran conectados dos ramas deresistencias térmicas en serie (Figura 6.6.B).
c) Resistencias paralelas del circuito térmico equivalente
Ra = R1 + R’a + Rf + R (6-61)
Rb = R2 + Rk + RA (6-62)
d) Coeficientes de referencia de las fuentes de calor hacia el anodo 1.
δδ
==
=+
=
RR
kkRR
k
RR
kkR
'RRk
k7151
271
a
F4131
a
A141
(6.63)
e) Potencia total de pérdidas referidas al nodo 1
P’1 = P1 + k31P’3 + k41P’4 + k51P’5 + k71P7 (6-64)
f) Sobre elevación media de la temperatura de los devanados del estator (°C)
01a
a11 RP
RRRR'P ++
=θδ
δ (6-65)

130
Miguel Ocharán P.a
0
Ro
7P76
3 P3
4 P4
Rf
R´∆
P5 5
Rk
(R´δ+Rp)
P11
8
R1 R2
R´n Rn
Ro
0
P8 8
P11
RδRa
Qkg=P´1+Pδ=P1
Qkg=P´1
6.6a 6.6b
Figura 6.6 Transformación del circuito térmico equivalente del motor
6.8 CONSIDERACIONES PARA EL CÁLCULO
El cálculo de verificación, sobre la base de un modelo experimental, se realizabajo condiciones en las que el motor utilizado va a cumplir con bastante eficaciasu operación y bajo el supuesto que la calidad de su fabricación es óptima. Estoquiere decir que la calidad de impregnación, de ensamblaje y de la fundición coladadel rotor, se han realizado bajo buen control de calidad.
La sobre elevación de temperatura o recalentamiento calculado en el devanadodel stator, en régimen nominal, debe de ser menor a la temperatura permisible deacuerdo a las normas preestablecidas con un margen de 5 a 15%.
Si el cálculo no satisface esta exigencia entonces luego de volver a realizar todo elcálculo según la metodología desarrollada, se toman las medidas correctivas conel fin que bajo nuevas condiciones, los resultados finales sean satisfactorios; así,en caso que el sobre calentamiento sobrepase el valor permisible, entonces sepuede eliminar esta desventaja o error siguiendo, por ejemplo, las siguientesrecomendaciones:

131
Máquinas Asincronas - Estados Estable y Dinámico
1. Utilizar un aislamiento de mayor clase térmica.2. Disminuir las pérdidas en el motor, disminuir las cargas específicas y realizar
un cálculo electromagnético nuevo. Para lograr un mayor efecto en ello sepuede disminuir la densidad de corriente de los devanados del estator y rotor,gracias al incremento del área de las secciones de las ranuras o disminuyendoel número de espiras del devanado; en el último de los casos es necesarioincrementar el flujo magnético.
Una menor variación en el cálculo se tiene cuando se incrementa el flujoincrementando la longitud activa. Una de las medias más radicales para disminuirel calentamiento es el incremento de los diámetros principales D y Da.
Además de todos estos intentos se pueden aplicar técnicas que se emplean paradisminuir el calentamiento del motor; por ejemplo variar los coeficientes térmicos,variar las aletas del ventilador, etc. Es decir, los cambios que se van a realizar enel sistema de refrigeración y ventilación, no serán para todas las máquinas igualesy tan efectivos, ya que la ventilación recomendada por el sistema de refrigeraciónes casi óptima en el sentido técnico-experimental.
6.9 RESULTADOS DEL CALCULO
CALCULO TÉRMICO MOTOR 13KW, 1800rpm, p=2, f=60Hz, ηηηηη=0.885.cos φφφφφ= 0.880
Datos producto del cálculo según metodología del Capítulo I
a) Geométricos
D = 18.4 cm l = 12.3 cm hcm = 1.10 cm
Dp = 18.36 cm Da = 29.1 cm ha = 2.80 cm
Z1 = 36 hzq = hπ 2.55 cm bz1 = 0.73 cm
δ’ = 1.35 cm δ = 0.90 cm kc = 0.95
nr = µn1 = 20 dµ1 = 0.156 cm ∆µ = 0.03 cm
hkA = 0.3 cm lAf = 21.85 cm lB(lb1)= 7.4cm
Lcm = 27.10
Dcm = 31.3 cm

132
Miguel Ocharán P.a
hµf = 3.7 cm
hp = 2.80 cm
Lp = 21.90 cm
L’p = 11.45 cm
Np = 20
N’p = 6
Npm = 0.80 cm
Bp = 0.60 cm
γ = 7°30’
∆µf = 0.03
Clase B
Dk = 36.80 cm
H = 180 mm
Dρ = Dcm = 31.30 cm
Dα = 0.83
Da = 24.15 cm
δA = 4.0 cm
δ0 = 0.60 cm
b) Eléctricos (Calculados en el Capítulo 4)
r1 = 0.360 ohm
r’2 = 0.245 ohm
x1 = 1.272 ohm
x’2 = 1.256 ohm
x12 = 41.84 ohm
lµ = 5.12 amp
ηm = 0.885
l’1n = 24.55 amp

133
Máquinas Asincronas - Estados Estable y Dinámico
l’2n = 23.03 amp
P1 = 14.53 Kw
P2 = 13.05 Kw (Pn)
S = 0.02856
pm = 0.141 Kw
pc1 = 0.268 Kw
pca = 0.197 Kw
pcz = 0.071 Kw
c) Coeficientes Térmicos (De Tablas – Capítulo 6)
• Carcasa λcm = 0.5 (hierro dulce)
• Núcleo estator λfe = 0.36 (E12)
• Aislamiento ranura λµ = 0.0016 (tipo B)
• Barniz impregnado λ∆ = 0.0011
• Conductor λcu = 3.8 (cobre)
→ B ⇒ 80°C de sobreelevación. Del tipo de motor.
I) Cálculo de las fuentes de calor
Pg = 0.2938 Kw
r*10 = 0.3890 ohm
r’*20 = 0.2648 ohm
P1 = 703.35 W
P2 = 568.23 W
P3 = 217.60 W
P4 = 197.23 W
P5 = 47 W
∑P = 1733.41W

134
Miguel Ocharán P.a
II) Cálculo de las resistencias térmicas (Fórmulas 6-22 a 6-54, en lamisma secuencia)
Sr∆ = 4749.44 cm2
Sp = 2775 cm2
S0p = 365.02 cm2
S∏p = 534.38 cm2
tp = 2.0486 cm
Sgk = 877.26 cm2
vδ0 = 29.4996 m/s
vcp = 15.81 m/s
α∏p = 11.78x10-3 N/cm2°C
α0p = 8.1171x10-3
kp = 3507.16
Λ0 = 72.59
R’0 = 0.0420°C/w
R»0 = 0.0104°C/w
Scm = 143.19 cm2
Rcm = 0.03154°C/w
R∆ = 0.0041°C/w
Rc = 8.056x10-3
Rz = 0.02307
R’∆ = 8.128x10-3
Rf = 0.0109
∏ = 2.85 cm
Rnµ = 0.0293°C/w
λz = 6.091x10-3 w/°C.cm
ξ = 0.2419
Rng = 0.0113

135
Máquinas Asincronas - Estados Estable y Dinámico
SM = 13.76 cm²
R∏ = 0.0553°C/w
SA = 1983.35 cm2
Vp = 17.30 m/s
αA = 0.01376 w/°C cm2
RA = 0.0414°/w
Sk = 3021.45 cm2
Rk = 0.300°C/w
III) Cálculo del circuito equivalente térmico. (Según fórmulas 6-55 a 6-65, en la misma secuencia)
P’3 = 439.66
P’5 = 439.60
RT = 0.08394°C/w
R0 = 0.0052
R1 = 0.0158
R2 = 0.0039
Ra = 0.0901
Rδ = 0.0753
K41 = 0.2653
K31 = 0.3863
K71 = 0.0518
K51 = 0.4502
P’1 = 1733.41
θ1 = 92.18°C

136
Miguel Ocharán P.a

137
Máquinas Asincronas - Estados Estable y Dinámico
CAPITULO 7
LA MÁQUINA ASÍNCRONA EN ESTADO DINÁMICO
7.1 PROCESOS TRANSITORIOS ELECTROMAGNETICOS
Dentro de las exigencias actuales hacía el accionamiento asíncrono, tenemos:• Alta frecuencia de conexión del motor asíncrono.• Regímenes de funcionamiento por ondas de impulso.• Inversión de giro parcializado.• Diversidad de métodos de parada con alta precisión.
En caso de despreciar los procesos transitorios electromagnéticos durante el análisisde estos regímenes obtendremos como resultado:• Una evaluación incorrecta de: los pares (momentos), que interactúan sobre el
sistema del accionamiento.• Grandes errores durante la determinación de pérdidas en el motor.• Inexactitud en la determinación del método de parada del accionamiento, etc.
Los motores asíncronos generan pares electromagnéticos de alta magnitud duranteel proceso transitorio, los cuales sobrepasan en varias veces el valor del par nominale incluso del par critico. Estos pares son la causa principal de la aparición detensiones mecánicas peligrosas en los elementos del circuito cinemático del sistemadel accionamiento. Estos pares no se pueden despreciar durante la evaluación deconfíabilidad de los accionamientos eléctricos.
Las condiciones que originan estos transitorios electromagnéticos en los motoresasíncronos, principalmente debido a su campo no atenuable, afectan notablementela prolongación de estos procesos transitorios. Así pues, por ejemplo, si se realizala inversión de giro del motor asíncrono, en el cual se tiene un campo no atenuable,la duración y el camino del frenado, cuando se invierten las fases, pueden ser

138
Miguel Ocharán P.a
notablemente diferentes, de acuerdo a que fases se hayan invertido. Enconsecuencia la precisión del procesamiento de comandos, depende principalmentede los procesos transitorios electromagnéticos.
Las curvas de los procesos transitorios en el accionamiento asíncrono se trazantradicionalmente, de acuerdo a la estadística de las características mecánicas, sinconsiderar los procesos transitorios electromagnéticos, lo cual conlleva a grandeserrores.
El estudio detallado de los procesos transitorios electromagnéticos nos da laposibilidad de diseñar y construir racionalmente el sistema del accionamientoeléctrico.
7.2GENERALIDADES ACERCA DEL MODELO MATEMÁTICO ENMÁQUINAS ASÍNCRONAS
7.2.1 MODELO MATEMÁTICO DEL MOTOR ASÍNCRONOTRIFÁSICO CON ROTOR CORTOCIRCUITADOPara describir los procesos electromagnéticos transitorios de la máquinaasíncrona, así como para cualquier convertidor electromecánico de energía, esnecesario describir las ecuaciones de balance mecánico y de energía, así comolas ecuaciones de conversión de energía eléctrica en mecánica. El primer tipode ecuación mencionado representa a la ecuación deducida de acuerdo a lasegunda Ley de Kirchoff y obtenida para cada circuito eléctrico de la máquina,el segundo tipo de ecuación mencionado es la ecuación de desplazamiento delaccionamiento y el tercer tipo de ecuación establece la relación cualitativa dela conversión de la energía electromagnética en mecánica y viceversa.
Durante la deducción de las ecuaciones diferenciales de la máquina asíncrona,se consideran las siguientes suposiciones:• No se considera la saturación del circuito magnético, las pérdidas en el
acero y la influencia de los dientes y las ranuras.• Se considera que los devanados de fase son totalmente iguales y el entrehierro
es uniforme.• No se consideran los armónicos espaciales de alto orden del campo
magnético, o sea el campo magnético de cada devanado se consideradistribuido uniformemente por toda la periferie del estator.
• Generalmente se considera que los parámetros del rotor están referidoshacia el estator.

139
Máquinas Asincronas - Estados Estable y Dinámico
La máquina asíncrona se debe de analizar como un sistema de devanadosenlazados magnéticamente, ubicados en el estator y rotor.
Durante el análisis de la interacción de los devanados de la fase «A» del estatory los devanados de la fase «a» del rotor, es necesario recalcar que la disposiciónmutua de estos devanados en el espacio, cuando el rotor gira, varíacontinuamente.
Conforme a las suposiciones tomadas en cuenta, la inductancia mutua entrelos devanados «A» y «a» debe ser igual a:
(7.1) cos12 AaAa MM ϕ=
.eléctricos gradosen ,a""y A"" fases las de devanados de ejes los entre ángulo el Es
Henrios.en ,a""y A"" ejes los coinciden cuandolugar tienecual la
mutua, ainductanci la de máxima magnitud la es M:Donde
Aa
12
ϕ
:rotor del fases 3 las para
V
(7.2) ;V
;dt
d V
:forma siguiente la tienen siones- tende ecuaciones lasestator del fases 3 las Para
1C
1B
1A
A
Entonces
ridt
d
ridt
d
ri
CC
BB
A
+=
+=
+=
ψ
ψ
ψ

140
Miguel Ocharán P.a
;0
(7.3) ;0
;dt
d0
2
2
2a
ridt
d
ridt
d
ri
cc
bb
a
+=
+=
+=
ψ
ψ
ψ
De aquí en adelante los subíndices A, B y C simbolizarán a las fases de losdevanados del estator y los subíndices a, b y c a las fases de los devanados delrotor.Entonces:
. la es-)(i (fase e es- )(
inale term vael es-
A
A
a
a
A
i
V
ψψPor ejemplo el flujo concatenado de la fase A del estator se determina deacuerdo a la magnitud de la inductancia propia de la fase A(LA) y de lainductancia mutua de la fase A (MA) con respecto a todos los demás devanadosde la máquina.
Tomando en cuenta la expresión (7.1) se pueden escribir las siguientesexpresiones para los flujos concatenados totales del estator y del rotor. Estasexpresiones para la fase A y a tienen la siguiente forma:
7.5) ( coscos... ...cos
7.4) ( coscos... ...cos
a
CaCaCBaBaB
AaAaAcacbabaa
cAcAcbAbAb
aAaAaCACBABAAA
iMiMiMiMiMiL
iMiMiMiMiMiL
ϕϕϕψ
ϕϕϕψ
++++++=
++++++=

141
Máquinas Asincronas - Estados Estable y Dinámico
Donde:
LA=LB=LC=L1 - es la inductancia por fase en el estator.
La = Lb = Lc =L2 - es la inductancia por fase en el rotor.
MAB = MAC = MBC = M1 - es la inductancia mutua entre 2 devanados «X» delestator.
Mab=Mac=Mbc=M2 es la inductancia mutua entre 2 devanados «X» del rotor.
MAa = MBa = ... =M12 es el valor máximo de la inductancia mutua entre 2devanados «X» del rotor y del estator.
En la fig. 7.1. se indica como se distribuyen los ejes de los devanados de lamáquina asíncrona. Con las líneas A, B, C se indican los ejes de los devanadosde fase del estator y con las líneas a, b, c se indican los ejes de los devanadosde fase del rotor. El ángulo ϕ es el ángulo existente entre los ejes de los devanadosA y a.
Fig. 7.1. Esquema de distribución de los ejes de los devanados de la máquina asíncrona

142
Miguel Ocharán P.a
De la fig. 7.1. se pueden deducir las siguientes relaciones:
ϕaA=ϕAa=ϕ; ϕaB=ϕBa=ϕ -120°
ϕaC=ϕCa=ϕ+120°;
ϕbA=ϕAb=ϕ+120°; ϕbB=ϕBb=ϕ;
ϕbC=ϕCb=ϕ -120°;
ϕcA=ϕAc=ϕ - 120°; ϕcB=ϕBc=ϕ +120°;
ϕcC=ϕCc=ϕ;.
Entonces (7.4) y (7.5) para todas las fases del estator y rotor, tomarán la siguienteforma:
ΨA=L1iA+M1iB+M1iC+M12cosϕia+…...+M12cos(ϕ+120°)ib+M12cos(ϕ-120°)ic;
ΨB=M1iA+L1iB+M1iC+M12cos(ϕ-120°)ia+... ..+M12cosϕib+M12cos(ϕ+120°)ic (7.6)
ΨC=M1iA+M1iB+L1iC+M12cos(ϕ+120°)ia+... ...+M12cos(ϕ-120°)ib+M12cosϕic
Ψa=L2ia+M2ib+M2ic+M12cosϕiA+M12cos(ϕ-120°)iB +M12cos(ϕ+120°)iC;
Ψb=M2ia+L2ib+M2ic+M12cos(ϕ+120°)iA+ …..+M12cosϕiB+M12cos(ϕ-120°)iC (7.7)
Ψc=M2ia+M2ib+L2ic+M12cos(ϕ-120°)iA +M12cos(ϕ+120°)iB+M12cosϕiC
Las ecuaciones (7.2) y (7.3) conjuntamente con las ecuaciones (7.6) y (7.7) formanel primer grupo de ecuaciones que componen el sistema de ecuaciones diferencialesde la máquina asíncrona.
La expresión para determinar el par electromagnético del motor asíncrono, puedeser obtenida en base a la posición conocida, de acuerdo a la cual el parelectromagnético de la máquina eléctrica es igual a la derivada parcial de la energíaelectromagnética acumulada con respecto al ángulo geométrico.
ωϕ=
dtd

143
Máquinas Asincronas - Estados Estable y Dinámico
La energía electromagnética de la máquina asíncrona puede ser determinada deacuerdo a la siguiente expresión:
(7.8) ][21
ccbbaaCCBBAAem iiiiiiW ψψψψψψ +++++=
De esta expresión, se deduce que el par electromagnético es igual a:
(7.9) pW
T em
ϕ∂∂
=
Donde: p es el número par de polos.
La ecuación de movimiento del accionamiento es:
(7.10) dtd
pJMM C
ω=−
Donde:
ω-es la velocidad angular de giro del rotor, en grados eléctricos/seg.
J es el momento de inercia del accionamiento eléctrico, referido al eje delmotor.
MC Es el par estático de la carga.
Las expresiones (7.2),(7.3),(7.6),(7.7),(7.9) y (7.10) forman el sistema deecuaciones de la máquina asíncrona.
Este sistema contiene catorce ecuaciones donde se tienen catorce incógnitas: seiscorrientes, seis flujos concatenados, el par electromagnético, la velocidad angularo el ángulo de desplazamiento ϕ que está relacionado con la velocidad por mediode la siguiente expresión:
pp geomgeomωωϕϕ == ;

144
Miguel Ocharán P.a
Así mismo es necesario denotar que en el sistema de ecuaciones analizado, seutiliza solamente el concepto de «ángulo eléctrico» así como la frecuencia angular:ω=dϕ/dt, lo cual permite resolver conjuntamente las ecuaciones (7.6),(7.7), (7.9)y (7.10).
Por otro lado en las ecuaciones del par electromagnético y de movimiento delaccionamiento deben de emplearse los conceptos de «ángulo y velocidadgeométricos»
Con lo cual se puede explicar el por qué de la presencia de «p» como factor en lasecuaciones (7.9) y (7.10).
Este principio nos permite emplear el sistema de ecuaciones obtenido, para unamáquina eléctrica de cualquier número de polos.
El sistema de ecuaciones diferenciales deducido, es muy complejo para una soluciónanalítica. Este sistema es de alto orden y contiene ecuaciones no lineales concoeficientes periódicos.
Es por esto que el sistema de ecuaciones de la máquina asíncrona trifásica, deducidade acuerdo a magnitudes reales de corrientes de fase y de flujos concatenadosrequiere de un conjunto de transformaciones, gracias a las cuales se puede obtenerun sistema de ecuaciones con coeficientes constantes.
7.2.2. RELACIÓN ENTRE LAS INDUCTANCIAS PROPIAS EINDUCTANCIAS MÚTUAS DE LOS DEVANADOS Y PARÁMETROSENERGÉTICOS EMPLEADOS EN LA TEORÍA DE LA MÁQUINAASÍNCRONA TRIFÁSICACuando se realizan cálculos analíticos de los procesos transitorios
electromagnéticos de las máquinas asíncronas, antes que todo, surge la necesidadde relacionar los parámetros que entran en el sistema de ecuaciones diferenciales,tales como: L1, L2, M1, M2, M12 con los parámetros empleados en la teoría demáquinas eléctricas (X1, X2, Xo).
Estos últimos parámetros se pueden calcular por fórmulas ya conocidas.
Para relacionar los mencionados parámetros es necesario escribir las ecuacionesde tensiones en régimen estable de acuerdo a (7,2), (7,3), (7,6) y (7,7) y compararestas ecuaciones con las empleadas en la teoría de máquinas eléctricas; las

145
Máquinas Asincronas - Estados Estable y Dinámico
corrientes del estator y del rotor por fase en régimen estable tienen la siguienteforma:
Para el estator:
iA=Im1cos(ω0t+ξ);
iB=Im1cos(ω0t+ξ-120°); (7.11)
iC=Im1cos(ω0t+ξ+120°);
Para el rotor:
ia=Im2cos[(ω0 -ω)t+η];
ib=Im2cos[(ω0 -ω)t+η-120°]; (7.12)
ic=Im2cos[(ω0 -ω)t+η+120°];
Donde:
Im1 e Im2 es la amplitud de las corrientes por fase del estator y rotor.
ξ y η es la fase inicial de la corriente de la fase A y a respectivamente.
Las tensiones de alimentación por fase de los devanados del estator son iguales a:
vA=Vmcos(ω0t+γ);
vB=Vmcos(ω0t+γ-120°); (7.13)
vC=Vmcos(ω0t+γ+120°);
Reemplazando las ecuaciones para las corrientes (7.11) y (7.12) en la primeraecuación (7.6) y tomando en cuenta las siguientes igualdades:
iA+iB+iC=0; ia+ib+ic=0; ϕ=ωt

146
Miguel Ocharán P.a
Determinamos el flujo total de la fase A en régimen estable:
23I...
L(I
2m
11mA
+
−=Ψ
Realizando en forma análoga las transformaciones de las expresiones del flujototal Ψa de la fase a del rotor, obtenemos:
23 ...
(
1
22
+
−=Ψ
MI
MLI
m
ma
γω jtjmA eeVV 0=
ξω jtjmA eeII 0
1=ηωω jtj
ma eeII )(2
0 −=
Escribimos en forma compleja las variables de las ecuaciones (7.11) a (7.15),entonces:
23)( 122111
00 MeeIMLeeI jtjm
jtjmA
ηωξω +−=Ψ
23...
...)(
12)(
1
22)(
2
0
0
MeeI
MLeeI
jtjm
jtjma
ξωω
ηωω
−
−
+
+−=Ψ
Reemplazando las expresiones dΨA/dt e IA en la ecuación de tensiones de la faseA del estator y realizando algunas transformaciones, obtenemos:
Ψ1=Ψu1+jΨv1 ; i1=iu1+jiv1; V1=Vu1+jVV1
(7.16) eIr)eIe(IM23j...
...e]I23)[(
jm11
jm2
jm1012
jm1012011
ξηξ
ξγ
ω
ωω
+++
+−−= MMLjeV jm

147
Máquinas Asincronas - Estados Estable y Dinámico
Reemplazando las expresiones dΨa/dt en Ia en la ecuación de tensiones de la fasea del rotor y realizando algunas transformaciones, obtenemos:
(7.17) eI-
)eI...
...e(IM23je]I
23)[(0
jm2
0
0
2jm2
jm1012
jm2012022
ηη
ξη
ωωω
ωωω
r
MMLj
++
++−−=
Las ecuaciones en forma compleja de la máquina asíncrona, que se analizangeneralmente cuando se estudia la teoría de la máquina eléctrica y cuando sedesprecian las pérdidas en el acero, tienen la siguiente forma:
210
00222
001111
(2.18) )(0
)(
III
IjXIjXsr
IjXIjXrV
+=
++=
++=
En las ecuaciones (7.16) y (7.17), denotaremos:
021j
2mj
1m
1j
m2j
2m1j
1m
IIIeIeI
; VeV ;IeI ;IeI
=+=+
===ηξ
γηξ
Entonces las ecuaciones (7.16) y (7.17) tendrán la siguiente forma:
IM23jI]M
23-...
...)ML([jrV
00121012
11011
ω+ω
−−ω+=
(2.19) IM23jI]M
23-...
...)ML([j-r0
00122012
220
0
0
2
ω+ω
−−ω+
ω
ωω=

148
Miguel Ocharán P.a
,210 III +=
Comparando las ecuaciones (7.18) y (7.19), obtenemos:
2010
220110
1200
1202202
1201101
;:
;)( ;)(:Denotamos
;23
(7.20) ;23)(
;23
)(
XXXXXXEntonces
XMLXML
MX
MMLX
MMLX
rs
rs
+=+=
=−=−
=
−−=
−−=
ωω
ω
ωω
ωω
Donde:
Xs(Xr) Son las reactancias síncronas del devanado del estator (rotor), queconsideran el enlace magnético con otros 2 devanados de fase del estator (rotor).Se denominan REACTANCIAS SÍNCRONAS a estas, debido a que cuando setiene una velocidad síncrona en el rotor, la reactancia equivalente del rotor seráigual a Xs cuando el motor se alimenta por el lado del estator (o sea referido allado del estator) y Xr cuando el motor se alimenta por el lado del rotor (referido allado del rotor);
X0=ω0(3/2)M12,que viene a ser la inductancia mutua, que considera el enlacemagnético de un devanado del estator (rotor) con 3 devanados del rotor (estator).
7.2.3. SENTIDO FÍSICO DE LAS FÓRMULAS DE CONVERSIÓNEl sistema de ecuaciones diferenciales de la máquina asíncrona trifásica ha
sido escrita en relación a parámetros reales de fase. La presencia de coeficientesperiódicos antes de las variables en las ecuaciones, obliga a buscar caminos desimplificación del sistema de ecuaciones para obtener ecuaciones con coeficientesconstantes. Para ello se requiere reemplazar los coeficientes.

149
Máquinas Asincronas - Estados Estable y Dinámico
Supongamos que el sistema de ecuaciones se escribe en función a las nuevasvariables y este sistema describe el comportamiento de una máquina asíncronaideal, para la cual las tensiones, corrientes y flujos totales están relacionadas conlas tensiones, corrientes y flujos totales de la máquina real mediante las fórmulasa determinar del reemplazo de las variables.
Por cuanto, las ecuaciones diferenciales de la máquina asíncrona ideal no contienencoeficientes periódicos, entonces se puede suponer que el rotor de esta máquinaes inmóvil con respecto al estator, en efecto, los coeficientes periódicos aparecena consecuencia de la variación de la posición mutua de los devanados del estatory rotor.
Consideramos que el campo del estator y el rotor de la máquina asíncrona idealgiran en el espacio a una velocidad cualquiera ωk. Se puede suponer que la magnitudde ωk varía la forma de las ecuaciones, simplificando o complicándolas, es por elloque por el momento a la magnitud ωk no se le va a dar un valor determinado.
Seguidamente supongamos que esta máquina asíncrona ideal es bifásica yequivalente a una máquina real trifásica de acuerdo a las fuerzas magnetomotrices,las cuales se generan tanto por las corrientes del estator como por las del rotor.
En la figura 7.2 se muestra el esquema de la máquina asíncrona bifásica ideal.
Los devanados del estator y rotor son inmóviles uno con respecto a otro y seubican a lo largo del sistema de coordenadas u, v; donde ambos ejes para casogeneral pueden girar en el espacio con una velocidad arbitraria ωk, tal como semuestra en la fig 7.2.
Fig. 7.2 Esquema equivalente de la máquina asíncrona ideal bifásica.

150
Miguel Ocharán P.a
A cada devanado se conectan fuerzas electromotrices adicionales, las cualesconsideran la rotación del rotor con respecto al estator en la máquina asíncronareal. Así mismo la magnitud de la velocidad de giro ωk del sistema de coordenadasu, v.
Para transformar el sistema de ecuaciones diferenciales de la máquina asíncronatrifásica real, se requiere la solución de 2 problemas:• Se tiene que hallar las fórmulas de reemplazo de las variables.• Utilizando las fórmulas de conversión, obtener un sistema de ecuaciones
diferenciales con respecto a las variables nuevas.
Fig 7.3. Esquema para deducir las fórmulas de conversión.
En la fig 7.3. con las líneas A, B, C se designan los ejes de los devanados de fasedel estator. Con las letras u, v se designa al eje ortogonal del sistema de coordenadas(u, v), el cual rota en el espacio con una velocidad arbitraria ωk. En la fig 7.3. semuestra también el vector I1, el cual es proporcional a la fuerza magnetomotriztotal que se genera por las corrientes de las 3 fases del estator.
De la fig 7.3 se observa que:iA=I1cosδ1;
iB=I1cos(δ1-120°); (7.21)
IC=I1cos(δ1+120°);

151
Máquinas Asincronas - Estados Estable y Dinámico
Donde:δ1 es el ángulo entre I1 y el eje de la fase A del estator.I1 es la magnitud absoluta de I1.
Las corrientes iu1 e iv1, que actúan en los ejes «u» y «v» y definen al vector I1, sepueden determinar de acuerdo a las siguientes expresiones:
(7.22) );-tsen(Ii );-tcos(Ii
1k1v1
1k1u1
δωδω
−==
Ahora el problema consiste en obtener a partir de las relaciones (7.21) y (7.22) lasrelaciones entre iu1 e iv1 vs iA,,iB e iC.
De las expresiones (7.22) hallamos:
Iu1=(I1cosδ1)cosωkt+(I1senδ1)senωkt.
De la primera ecuación de (7.21), sabemos que:
iA=I1cosδ1;
Y de la segunda y tercera ecuación, obtenemos:
(7.24) )]120sen(...
...)120sen(sen[32
:obtener puede se análoga formaEn (7.23) )]120cos( ...
...)120cos(cos[32 ...
...sen)(33cosi
:donde
).(33sen
v1
u1
1
okC
okBkA
okC
okBkA
kCBkA
CB
ti
titii
ti
titi
tiiti
De
iiI
++
+−+−=
++
+−+=
=−+=
−=
ω
ωω
ω
ωω
ωω
δ

152
Miguel Ocharán P.a
En la fig 7.3 con líneas a, b, c se designan a los ejes de fase de los devanados delrotor.
El vector I2 que se muestra en la fig. 7.3 y es proporcional a la fuerza magnetomotriztotal, que se genera debido a la suma de las corrientes rotóricas.
De la fig 7.3 tenemos:
ia=I2cos(δ2 -ϕ);
ib=I2cos(δ2-ϕ-120°); (7.25)
Ic=I2cos(δ2-ϕ+120°);
Donde:δ2 es el ángulo entre el vector I2 y el eje de la fase A del estator;I2 es el valor absoluto del vector I2.
Las corrientes iu2 e iv2, que actúan en los ejes «u» y «v» y definen al mismo vectorI2, de acuerdo a la fig 7.3, se pueden determinar por la siguiente expresión:
(7.26) );-tsen(Ii );-tcos(Ii
2k2v2
2k2u2
δωδω
−==
De las expresiones (7.25) y (7.26) se puede hallar la relación entre iu2 e iv2 vs ia,ib e ic:
(7.27) )];120sen(...
....)120sen()sen([32i
; )]120cos(...
...)120cos()cos([32i
v2
u2
okc
okbka
okc
okbka
ti
titi
ti
titi
+−+
+−−+−−=
+−+
+−−+−=
ϕω
ϕωϕω
ϕω
ϕωϕω
Las expresiones (7.23) y (7.24) para las corrientes del estator y las expresiones(7.27) para las corrientes del rotor representan a las denominadas fórmulas detransformación, o sea a las fórmulas de traspaso de las variables de la máquinaasíncrona real trifásica a las variables de la máquina asíncrona ideal bifásica.

153
Máquinas Asincronas - Estados Estable y Dinámico
Obviamente surge una pregunta: Son suficientes 2 variables iu1 e iv1 para elreemplazo total de 3 variables reales iA, iB e iC.?.
Como se puede observar esto si se puede solucionar, si realizamos la transformaciónen forma inversa. Para lo cual multiplicamos la igualdad (7.23) por cosωkt y laecuación (7.24) por senωkt y sumamos ambas expresiones.
Luego de realizar las transformaciones, obtenemos:
iA=iu1cosωkt-iv1senωkt+(1/3)(iA+iB+iC).
La corriente I01=(1/3)(iA+iB+iC) no se puede expresar en base a iu1 e iv1.Supongamos que es una contradicción, entonces existen unos valores «L» y «q»de tal forma que se cumple la siguiente igualdad:
iA+iB+iC=Liu1+qiv1. (7.28)
Reemplazando en la última expresión iu1 e iv1, de acuerdo a las fórmulas (7.23) y(7.24) e igualando los coeficientes antes de iA, iB e iC respectivamente en ambosmiembros de la igualdad, obtenemos:
);120sen(32)120cos(
321
);120sen(32)120cos(
321
;sen32cos
321
ok
ok
ok
ok
kk
tqtL
tqtL
tqtL
+−+=
−−−=
−=
ωω
ωω
ωω
Sumando estas 3 igualdades obtenemos:
)]120sen()120sen([sen32...
...)]120cos()120cos([cos323
ok
okk
ok
okk
tttq
tttL
++−++
+++−+=
ωωω
ωωω
Las expresiones que están dentro de las llaves son iguales a cero. Por lo tantopara cualquier valor de «L» y «q» no se cumple la igualdad (7.28). Lo que significaque las corrientes I01, iA, iB e iC no pueden expresarse solamente a través de iu1 eiv1.

154
Miguel Ocharán P.a
Para el sistema trifásico, la corriente I01 es igual a la corriente de secuencia cero;y cuando se conecta los devanados del estator de la máquina asíncrona en estrellacon neutro aislado, esta corriente es igual a cero.
Entonces para el caso general, las fórmulas de transformación para los parámetrosdel estator y rotor respectivamente, tienen la siguiente forma:
i01=1/3[iA+iB+iC]
i02=1/3[ia+ib+ic]
7.29) ( )];120sen(...
...)120sen(sen[32i
; )]120cos(...
...)120cos(cos[32i
v1
u1
okC
okBkA
okC
okBkA
ti
titi
ti
titi
++
+−+−=
++
+−+=
ω
ωω
ω
ωω
Las transformaciones (7.29) y (7.30) se realizan también para las tensiones yflujos totales.
El sentido físico de las fórmulas de transformación (7.29) y (7.30) para la máquinaasíncrona, es de que esta máquina asíncrona trifásica real se refiere (se representa)como una máquina asíncrona bifásica ideal equivalente a la real de acuerdo a lasfuerzas magnetomotrices (f.m.m), que se generan por las corrientes del estator yrotor.
Para lo cual el estator y rotor de la máquina bifásica son inmóviles uno con respectoa otro y giran en el espacio con una velocidad arbitraria ωk. La magnitud de lavelocidad de giro del rotor con respecto a la del estator en la máquina real y lamagnitud de velocidad ωk se consideran por medio de fuerzas electromotrices(f.e.m) adicionales (ver fig 7.2).
7.2.4. TRANSFORMACIÓN DE ECUACIONES DIFERENCIALESDE LA MÁQUINA ASÍNCRONA.Realizaremos la transformación a las nuevas variables de los sistemas (7.6) y
(7.7).

155
Máquinas Asincronas - Estados Estable y Dinámico
La primera igualdad del sistema (7.6) la multiplicamos por 2/3(cosωkt), la segundapor 2/3[cos(ωkt-120°)] y la tercera por 2/3[cos(ωkt+120°)]. Posteriormentesumamos las 3 ecuaciones y luego de realizar las transformaciones obtenemos elflujo total del estator en el eje «u», que tiene la siguiente forma:
23)(
23)(
:menterespectivav""y u"" ejes losen rotor del totalesflujos losminar -deter para sexpresione las hallamos(7.30), fórmula la
doconsiderany (7.7)rotor del totalflujo del presiones-ex las para maciones transformismas las Realizando
23)(
:v"eje" elen estator del totalflujo elobtener puede se análoga formaEn
23)(
1122222
1122222
2121111
2121111
uvv
uuu
vvv
uuu
iMiML
iMiML
iMiML
iMiML
+−=Ψ
+−=Ψ
+−=Ψ
+−=Ψ
Empleando las expresiones y simbología obtenidas en el epígrafe 7.2, copiamoslas expresiones para los flujos totales en la siguiente forma:
(7.32) ; ;
(7.31) ; ;
10220
10220
20110
20110
vvSv
uuSu
vvSv
uuSu
iXiXiXiX
iXiXiXiX
+=Ψ+=Ψ+=Ψ+=Ψ
ωωωω
Deduzcamos las ecuaciones diferenciales para las tensiones con base en las nuevasvariables de transformación: la primera ecuación del sistema (7.2) la multiplicamospor 2/3(cosωkt), la segunda por 2/3[cos(ωkt-120°)] y la tercera por 2/3[cos(ωkt+120°)]. Y finalmente sumamos las 3 ecuaciones y obtenemos:

156
Miguel Ocharán P.a
;cossen]cos[dtd
:obtenemoss,adicionale maciones transforalgunas Realizando
. i])120cos(...
...)120cos([cos32V
A
u11
u1
tdttt
rdt
dt
dtdt
dtdt
AkkkAk
Cok
Bok
Ak
ψωωωψωψ
ψω
ψωψω
+−=
+++
+−+=
;)120cos(...
...sen)]120cos(
0
0
tdt
tt
Bk
kkBk
ψω
ωωψωψ
−+
+−=−B[dtd
;)120cos(...
...sen)]120cos(
0
0
td
t
tt
Ck
kkCk
ψω
ωωψωψ
++
+−=+C[dtd
Tomando en cuenta las últimas relaciones, así como la anterior para Vu1, finalmenteobtenemos:
. iv u1111
u1 rdt
dvk
u +Ψ−Ψ
= ω
En forma análoga, se puede hallar la ecuación de tensiones del estator en el eje«v», así como las ecuaciones de tensiones del rotor en los ejes «u» y «v». Enconclusión las ecuaciones de tensiones transformadas para el estator y rotorrespectivamente se escriben de la siguiente forma:
(7.33) iv
iv
v1111
v1
u1111
u1
rdt
d
rdt
d
ukv
vku
+Ψ−Ψ
=
+Ψ−Ψ
=
ω
ω

157
Máquinas Asincronas - Estados Estable y Dinámico
(7.34) ;)(0
;)(0
222,
022
222,
022
vvrkuv
uurkvu
irdt
d
irdt
d
+Ψ+−Ψ−Ψ
=
+Ψ+−Ψ−Ψ
=
αωωω
αωωω
Notamos, que las componentes ωkΨu1 o (ωk-ω)Ψv2 del sistema de ecuaciones (7.33)y (7.34) respectivamente, representan a las f.e.m adicionales, tal como se muestraen la fig 7.2.
Del sistema de ecuaciones (7.31) y (7.32) se pueden deducir las siguientesrelaciones:
;;;
(7.37) ;11
;;;
:Donde
(7.36) );(
);(
(7.35) );(
);(
02,
20
01,
12,
022
12,
022
21,
011
21,
011
rr
rr
rr
SrrS
SS
SS
SS
Svvrv
Suuru
rvvSv
ruuSu
xx
kxr
kkxx
x
xx
kxr
kri
kri
kri
kri
===
−=−=
===
Ψ−Ψ=
Ψ−Ψ=
Ψ−Ψ=
Ψ−Ψ=
ασα
α
σ
ασα
α
αω
αω
αω
αω
Reemplazando (7.35) en (7.33) y (7.36) en (7.34), obtenemos:
(7.38) ;v
;v
2,
01,
011
v1
2,
01,
011
u1
vrSvSukv
urSuSvku
kdt
d
kdt
d
Ψ−Ψ+Ψ+Ψ
=
Ψ−Ψ+Ψ−Ψ
=
αωαωω
αωαωω

158
Miguel Ocharán P.a
(7.39) ;)(0
;)(0
1,
02,
022
1,
02,
022
vSrvrkuv
uSrurkvu
kdt
d
kdt
d
Ψ−Ψ+−Ψ−Ψ
=
Ψ−Ψ+−Ψ−Ψ
=
αωαωωω
αωαωωω
Es necesario aclarar que si como resultado de la solución del sistema de ecuacionesdiferenciales, se obtienen corrientes y flujos totales de la máquina bifásicaideal(iu1,Ψu1,etc), entonces de acuerdo a estos parámetros se pueden calcular lascorrientes y flujos totales de la máquina asíncrona real, de acuerdo a las fórmulasde transformación inversa, las cuales para el estator y rotor respectivamente,tienen la siguiente forma:
;)120sen()120cos(i
(7.40) ;)120sen()120cos(i
; sencosi
0111C
0111B
0111A
ititi
ititi
ititi
okv
oku
okv
oku
kvku
++−+=
+−−−=
+−=
ωω
ωω
ωω
;)120sen(...
...)120cos(i
(7.41) ;)120sen(...
....)120cos(i
; )sen()cos(i
022
2c
022
2b
0222a
iti
ti
iti
ti
ititi
okv
oku
okv
oku
kvku
++−−
−+−=
+−−−
−−−=
+−−−=
ϕω
ϕω
ϕω
ϕω
ϕωϕω
El sistema (7.41) se obtuvo como resultado de la solución de (7.29) con respectoa las variables iA, iB e iC, ,y el sistema (7.41) de la solución de (7.30) con respectoa ia, ib e ic.
La fórmula para determinar el par electromagnético en función de las corrientesde fase reales y el ángulo de desplazamiento del motor, se puede deducirreemplazando los valores del flujo total de los sistemas de ecuaciones (7.6) y (7.7)en la ecuación (7.8) en primer lugar y posteriormente en la ecuación (7.9).
Una vez determinada esta relación, utilizando las fórmulas de transformación inversa(7.40) y (7.41), reemplazamos los valores reales de las corrientes de la máquinatrifásica por las corrientes iu1, iu2, iv1.e iv2 de la máquina bifásica ideal. Entonces laexpresión para determinar el par electromagnético es:

159
Máquinas Asincronas - Estados Estable y Dinámico
(7.42) )ii-ip(i23
v2u1v1u20
0
ωx
=Τ
Reemplazando los valores de las corrientes en el flujo total, de acuerdo a (7.35) y(7.36) y tomando en cuenta la relación (7.37), obtenemos otra forma de definir elpar electromagnético:
(7.43) )-(xk
p23
v2u1v1u20
r0 ΨΨΨΨ=Τ
σω
Para un análisis más cómodo, resolvemos las ecuaciones de tensiones (7.38) y(7.39) y la ecuación de movimiento (7.10) con respecto a las primeras derivadas.Entonces el sistema de ecuaciones diferenciales de la máquina asíncrona toma lasiguiente forma:
)T-(T
pJ1
dtd
);(23T
;)(
(7.44) ;)(
;v
;v
resist
21120
21,
02,
02
21,
02,
02
12,
01,
0v11
12,
01,
0u11
=
ΨΨ−ΨΨ=
Ψ−−Ψ+Ψ−=Ψ
Ψ−+Ψ+Ψ−=Ψ
Ψ−Ψ+Ψ−=Ψ
Ψ+Ψ+Ψ−=Ψ
ϖσ
ω
ωωαωαω
ωωαωαω
ωαωαω
ωαωαω
vuvuS
r
ukvSrvrv
vkuSruru
ukvrSvSv
vkurSuSu
xkp
kdt
d
kdt
d
kdt
d
kdt
d
Si las tensiones reales de fase se determinan de acuerdo a las ecuaciones (7.13),entonces reemplazando estos valores en las fórmulas de transformación (7.29),obtenemos las fórmulas para hallar las tensiones en el sistema de coordenadasbifásico:

160
Miguel Ocharán P.a
vu1=Vmcos[(ω0 - ωk)t+γ)];
vv1=Vmsen[(ω0 - ωk)t+γ]; (7.45)
En la teoría de procesos transitorios electromagnéticos en máquinas eléctricas,se analizan 3 sistemas de coordenadas, las cuales vienen a ser el caso particulardel sistema anteriormente analizado, el cual gira a una velocidad angular arbitrariaωk.
El primer sistema de ejes es inmóvil con respecto al rotor y gira con respecto alestator a una velocidad del rotor (sistema d, q, 0), o sea ω=ωk. Este sistema decoordenadas se emplea para analizar los procesos transitorios en las máquinassíncronas de polos salientes y se recomienda emplearla también para el análisis delos procesos transitorios en las máquinas asíncronas cuya conexión de los circuitosdel rotor es asimétrica.
El segundo sistema es el sistema de ejes, que giran con respecto al estator conuna velocidad síncrona, o sea son inmóviles con respecto al campo de la máquinaasíncrona en el régimen estable, en este caso ω=ωk.
Simbolicemos este sistema bajo los índices x, y y o. Este sistema de coordenadases más usual para el análisis de los procesos transitorios en las máquinas asíncronas,ya que las tensiones Vx1 y Vy1 de acuerdo a (7.45) van a ser constantes.
En el tercer sistema de coordenadas los ejes son inmóviles con respecto al estator.( sistema α, β y 0) o sea, ωk=0
Las variables Vα1 y Vβ1, van a variar en función del tiempo senoidalmente deacuerdo a (7.45). El sistema α, β y 0, tiene la ventaja de que en este sistema, lacorriente iα1 va a ser igual a la corriente real de fase del estator de la máquinatrifásica.
Generalmente la selección del sistema de coordenadas a tomar, para el análisis delos procesos transitorios en las máquinas asíncronas, dependen de datos inicialesconcretos. (si el esquema de conexión es simétrico o asímétrico de los devanadosdel rotor y estator, si es necesario obtener las corrientes de fase , si el modelomatemático es simple).

161
Máquinas Asincronas - Estados Estable y Dinámico
Generalmente es más cómodo representar las ecuaciones diferenciales de lamáquina asíncrona en forma compleja, cuando se analizan sus procesos transitorios.Para lo cual se introducen nuevas variables:
Ψ1=Ψu1+jΨv1 ; i1=iu1+jiv1; v1=vu1+jvv1;
Ψ2=Ψu2+jΨv2 ; i2=iu2+jiv2;
En lugar de 2 magnitudes, se tiene una magnitud compleja, cuyo valor real sirvecomo variable en el eje «u»(eje+) y el valor imaginario sirve como variable en eleje «v»(eje +j), como se muestra en la fig. 7.3.
El sistema de ecuaciones diferenciales en forma compleja para la máquinaasíncrona va a tener la siguiente forma:
(7.46) ;k)]-j([
;k)j(ee
1s,
02k,
02
2r,
01k,
0)(jj1 0
Ψ+Ψ+−=Ψ
Ψ+Ψ+−=Ψ −
rr
sst
m
dtd
Vdt
dk
αωωωαω
αωωαωωωγ
);T-(T
pJ1
dtd
(7.46) );Im(23T
resist
210
=
ΨΨ=
ϖσ
ω &S
r
xk
p
Donde * significa la magnitud compleja conjugada. Posteriormente no se va aintroducir diferentes índices para simbolizar las variables complejas, que pertenecena diferentes sistemas de coordenadas. En caso de emplear para el análisis lasecuaciones en forma compleja, va a ser notorio en que sistema de coordenadas seescriben estas ecuaciones.
La transformación del sistema de ecuaciones diferenciales de la máquina asíncronaa la forma (7.44) o (7.46) es mucho más simple que el sistema de ecuacionesescritas para los parámetros reales de fase.

162
Miguel Ocharán P.a
Las ecuaciones (7.44) y (7.46) no contienen coeficientes periódicos. Tambiénnotamos que los sistemas de ecuaciones (7.44) y (7.46) se escriben con respectoa los flujos totales más no con respecto a las corrientes. Con lo que simplificaremosnotablemente el análisis.
7.3 MÉTODOS NUMÉRICOS DE SOLUCIÓN DE ECUACIONES APLICACIÓN DEL MODELO EN MÁQUINAS ASÍNCRONAS
Todas las experiencias del presente libro se realizan en PC´s, para lo cual seutilizan métodos numéricos de solución de ecuaciones diferenciales simples.Para la solución numérica de una ecuación diferencial simple, ésta debe de estardescrita en la forma normal de KOSI:
(7.47) ),( txfdtdX
=
Donde X es la matriz de las variables a determinar; f(x,t) miembro derecho de laecuación; t - tiempo.
Para la solución por métodos numéricos se necesita tener como dato los valoresiniciales de las variables, o sea los valores de las condiciones iniciales X(to)=Xo,entonces se supone que hay una solución a este problema para las condicionesiniciales dadas y esta solución se encuentra determinada para todos los instantesde tiempo t > to, donde to - es el valor inicial del tiempo.
El intervalo de tiempo tmax, dentro del cual se encuentra la solución, se dividen enpequeñas variaciones de tiempo (intervalos) hi=(∆t)i, los cuales son denominadopasos.
La finalidad del método de integración numérica, es de determinar un X(t), paratodos los valores de:
k
hk=to+∑ hi.
i=1

163
Máquinas Asincronas - Estados Estable y Dinámico
La mayoría de métodos de solución, están basados en dos caminos de solución:• Descomposición de la función por determinar, en una serie de Taylor• Por aproximación polinomial.
Los métodos basados en la descomposición en series de Taylor generalmente sonconocidos como Métodos de Runge Kutta y el método de aproximaciónpolinomial, es conocido como método de integración numérica.
7.3.1. MÉTODO DE RUNGE KUTTAEl algoritmo de este método se obtiene descomponiendo la función X(t) en la
serie de Taylor en base a la vecindad del punto correspondiente al instante detiempo t=tn:
( ) ( ) ( )( )
( )( ) ( )( )
(7.48) orden mayor de miembros...
...!
...!2
''...
....!1
'
1)(2
1
11
+
+−
++−
+
+−
+=
++
++
PtttXtttX
tttXtXtX
Pnnn
Pnnn
nnnnn
Los miembros de mayor orden se colocan en la parte izquierda de la ecuación(7.48) y toda la parte izquierda se reemplaza por Xn+1 y el valor exacto de X(tn) enla parte derecha de la ecuación (7.48) se reemplaza por X(tn). Entonces despuésde haber denominado la expresión X(tn) en f[X(tn),tn], se obtienen las siguientesecuaciones:
Xn+1 = Xn+hTp(Xn,tn;h) (7.49)
( )
(7.50) !
),(...
...!2
),('),(,,
)1(1
PtXfh
tXhftXfhtXT
nnPP
nnnnnnP
−−
+
++=
De la ecuación (7.49) se pueden obtener los métodos de Taylor prácticamente decualquier orden. Por ejemplo el método de Taylor de primer orden, llamado tambiénel método de Euler, tiene la forma :
Xn+1 = Xn+hf(Xn,tn) (7.51)
El error metódico local de éste método es relativamente pequeño, es por ello quepara obtener una buena precisión con ayuda del método de Euler es necesario

164
Miguel Ocharán P.a
elegir una magnitud pequeña del paso, lo cual conlleva a grandes pérdidas deltiempo de procesamiento de la máquina, es por esto que generalmente no se utilizaeste método en la práctica.
Los métodos de Taylor de orden más alto, empezando del segundo orden contienensoluciones particulares de la derivada de la función f(X,t). La determinación de lasolución particular de la derivada, es un problema dificultoso y puede traer errores.Pero el análisis matemático de Runge-Kutta encontró un método que nos permitaexcluir la necesidad de hallar las soluciones particulares de las derivadas y quenos da la misma solución exacta que el algoritmo de Taylor.
El método de Runge-Kutta de segundo orden tiene la siguiente forma:
Xn+1=Xn+hK2(Xn,tn;h) (7.52)
Donde :
K2(Xn,tn,h)=(1-a2)f(Xn,tn)+a2f[Xn+(a2h/2)] (7.53)
Aquí tenemos un parámetro libre a2≠ 0. En consecuencia se puede obtener todoun grupo de métodos Runge-Kutta de segundo orden, dando diferentes valores aa2 .por ejemplo, si seleccionamos a2=1/2 obtenemos el método modificado detrapecios o método de Jena y si seleccionamos a2=1, entonces obtenemos el métodode Euler-Kosi.
Para aumentar la precisión del cálculo, para una mayor magnitud del paso, esempleado ampliamente el método de Runge-Kutta de cuarto orden. Este se da deacuerdo a las siguientes expresiones:
Xn+1=Xn+hK4(Xn,tn;h) (7.54)
K1=f(Xn,tn) K4(Xn,tn;h)=1/2[K1+2K2+2K3+K4]
K2=f(Xn,[h/2]K1,tn+[h/2]);
K3=f(Xn,[h/2]K2,tn+[h/2]; (7.55)
K4=f(Xn,[hK3,tn+h);

165
Máquinas Asincronas - Estados Estable y Dinámico
Así como el método tiene cuarto orden, entonces se puede seleccionar un pasorelativamente grande, bajo consecuencias de un error local metódico de bajo valor,el cual es casi inapreciable en cada paso, es por esto que generalmente se tomaun paso relativamente rebajado.
Otra desventaja de este método es, de que la función f(Xn,tn) debe de calcularse4 veces para cada paso.
Además de todo esto, los valores de esta función no se emplean para los cálculossiguientes.
Consecuentemente desde el punto de vista «trabajoso» este método no es efectivoen comparación a algunos métodos de varios pasos, basados en el método deaproximación polinomial.
7.3.2. MÉTODO DE APROXIMACIÓN POLINOMIALEstá basado en la suposición de que la solución exacta al método de KOSI se
determina con el polinomio elevado a «k»:
kkttttX αααα ++++= ...)( 2
210
Donde:αo,α1,α2,...αk son constantes.
La expresión analítica en forma del polinomio elevado a la «K», que nos da laposibilidad de calcular exactamente el valor de X(tn+1) es conocida también comola fórmula de integración numérica de orden «K».
A diferencia del Método de Taylor, en la mayoría de las fórmulas de integraciónnumérica para el cálculo de Xn+1 se emplea la información de los pasos precedentes.
Es por esto que a los métodos de integración numérica se les denomina tambiénmétodos de varios pasos que son diferentes a los Métodos de Taylor que tambiénson denominados métodos de un paso. La forma general de la fórmula de integraciónnumérica de varios pasos es:
(7.56) ),(
),(),(...),([
...
101
0111
1101
∑∑−=
−−=
−
−−++−
−−+
+=
++++
+++=
P
iinini
P
ini
pnpnpnnnn
pnpnnn
tXfbhXa
tXfbtXfbtXfbh
XaXaXaX

166
Miguel Ocharán P.a
Donde: ai y bi son 2p +3 coeficientes, los cuales deben de ser determinados si esque la solución exacta es el POLINOMIO y si es que los cálculos previos de Xi sesuponen son exactos, entonces la ecuación (7.56) nos determina el valor exactode Xn+1.
También podemos aclarar de que si b1=0, entonces obtenemos una fórmula evidente(de tipo abierto), y si b≠0, entonces obtenemos una fórmula no evidente (de tipocerrada). La fórmula para determinar Xn+1 viene a ser de tipo no evidente, cuandola incógnita Xn+1 se encuentra en ambos miembros de la ecuación.
Para buscar los valores de Xn+1, de forma ordenada por el método no evidente,será necesario, realizar para cada punto unos cuantos cálculos por iteración.
(7.57) )( )(1
)1(1 XFX i
nj
n +++ =
Para un valor escogido del paso «h», el número de iteraciones puede ser disminuidoseleccionando una aproximación inicial que se encuentre lo suficientemente cercanaa la solución Xn+1. Antes de seleccionar arbitrariamente es aconsejable emplear elmétodo exacto para predecir. Por ejemplo, supongamos que hemos escogido elmétodo evidente de Euler, de acuerdo a (7.51), para pronosticar la aproximacióninicial para el método de trapecios, que es determinado por la ecuación:
(7.58) ),(]),,([2 1
)1(1 nnnnnnnn tXfttXhfXfhXX +++= ++
La ecuación (7.58) nos determina el valor corregido de Xn+1, después de unaiteración. En general pueden ser requeridas unas cuantas iteraciones, para verificarque el valor calculado es lo bastante cercano al valor buscado.
Los valores son secundarios, empleados sólo para calcular uno con respecto alotro, estos no son empleados finalmente, cuando se obtiene la iteración final. Ladescripción del proceso de cálculo de Xn+1, por el método no evidente es llamadatambién MÉTODO DE PRONÓSTICO -CORRECCIÓN.
Cualquier método de integración numérica de varios pasos, determinado por laecuación (7.56), no es autoiniciativo, ya que inicialmente sólo son datos Xo y to. Engeneral para realizar el cálculo de Xn+1, es necesario obtener p+1 valores anterioresde X, considerando el valor constante del paso «h».

167
Máquinas Asincronas - Estados Estable y Dinámico
Para obtener estos valores se utiliza el método de un paso, por lo menos p+1veces, antes de empezar el cálculo por el método de varios pasos. Para hallartodos estos valores iniciales frecuentemente se emplea el MÉTODO DE RUNGE-KUTTA de cuarto orden, que tiene un alto valor de aproximación y es fácil deprogramarlo.
Analicemos 2 métodos importantes de integración numérica.MÉTODO DE ADAMS-BASHFORTH, de orden «k», que viene a ser unmétodo evidente de varios pasos. que se obtiene de la ecuación (7.56) bajo lascondiciones siguientes:
P=k-1, a1=a2=…=ak-1=0, b1=0 (7.59)
O sea:
Xn+1=a0Xn+hb0f(Xn,tn)+ b1f(Xn-1,tn-1)+…
…+bk-1f(Xn-k+1,tn-k+1) (7.60)
Donde: tenemos k+1 coeficientes ao, bo, b1,...,bk-1, los cuales se determinan de talforma que la ecuación (7.60) sea exacta para todas las soluciones polinomiales deorden «k».
Para k=1 obtenemos el método de Adams-Bashforth de primer orden:
Xn+1=Xn+hf(Xn,tn) (7.61)
Como vemos esta expresión es el método evidente de EULER.
Para k=2, obtenemos el método de Adams-Bashforth de segundo orden:
(7.62) ),(21),(
23 111 −−+ −+= nnnnnn tXftXfhXX
Para K=3, obtenemos el método de Adams-Bashforth de cuarto orden:
(7.63) ),(125
),(1216),(
1223
22
111
−−
−−+
+
−+=
nn
nnnnnn
tXf
tXftXfhXX

168
Miguel Ocharán P.a
El método de Adams-Moultown de orden «k», viene a ser el método no evidenteobtenido para la ecuación (7.56); bajo las siguientes condiciones:
P=k-2, a1=a2=…=ak-2=0 (7.64)
Entonces:
Xn+1=a0Xn+hb-1f(Xn+1,tn+1)+b0f(Xn,tn)+b1f(Xn-1
,tn-1)+……+bk-2f(Xn-k+2,tn-k+2) (7.65)
Aquí tenemos k+1 coeficientes ao, b-1, bo, b1...,bk-2 que deben de ser determinadosde tal forma que la ecuación (7.65) sea correcta para todas las solucionespolinomiales de orden «k».
Para k=1, obtenemos el método de Adams-Moultown de primer orden:
Xn+1=Xn+hf(Xn+1,tn+1) (7.66)
Al contrario del método evidente de Euler, que se determina por la ecuación (3.17),este método se denomina Método No Evidente de Euler .Para K=2, obtenemos el método de Adams-Moultown de segundo orden
(7.67) ),(21),(
21 111 nnnnnn tXftXfhXX ++= +++
Como se observa este método viene a ser el método de trapecios.
Para K=3, obtenemos el método de Adams-Moultown de tercer orden:
(7.68) ),(121
),(128),(
125
11
111
−−
+++
−
++=
nn
nnnnnn
tXf
tXftXfhXX
Los métodos de Adams-Bashforth y de Adams-Moultown son solamente dos dela gran cantidad de métodos de varios pasos existentes, cuyas soluciones se danpor cálculos de gran precisión. Sin embargo se habla de gran precisión en estosmétodos, sólo al inicio de los cálculos, surgiendo posteriormente una tendencia deaumento del error metódico local y del error cuando se redondean los valores

169
Máquinas Asincronas - Estados Estable y Dinámico
en cada paso, es por esto, de que a través de un determinado intervalo de tiempo,el error aumentará sobre la solución final.
De lo dicho anteriormente deducimos que estos métodos de varios pasos sonineficientes, a excepción de los Métodos de Adams-Bashforth y Adams-Moultown.
Hasta ahora se ha entendido de que, para la solución de problemas se tiene queseleccionar uno de los métodos de integración numérica de un determinado orden,que será constante durante todo el proceso de integración.
Entonces para lo mencionado anteriormente, la magnitud del paso puede seroptimizada conforme se seleccione el mayor valor posible de «h», para el cual elerror metódico local será menor al error máximo generado al inicio y para el cualel método será estable numéricamente.
Para sistemas de varias ecuaciones, el número de cálculos no aumenta en granmagnitud, si es que se aumenta el orden del método. Es por ello que frecuentemente,es más efectivo cambiar el orden del método y la magnitud del paso «h» en cadaintervalo de tiempo determinado.
Cualquier sistema de ecuaciones diferenciales, cuya solución contengacomponentes de variación «rápida» o «lenta» es denominado SISTEMA RÍGIDO.
En los sistemas de ecuaciones lineales, el fenómeno de RIGIDEZ se observa enlos casos, cuando los valores propios de la matriz, que se encuentra asociada coneste sistema, se diferencian en gran magnitud.
El sistema no lineal es rígido, si su matriz, en los puntos de interés contiene caídasbruscas de sus propios valores. Las ecuaciones diferenciales de las MáquinasElectricas. son generalmente de este tipo.
Para solucionar efectivamente ecuaciones diferenciales rígidas, se debe deseleccionar un método, el cual nos permita variar la magnitud del paso en grandesrangos, conservando siempre la estabilidad del cálculo. Entonces este métodoiniciará la integración con un paso de pequeña magnitud, conservando las exigenciasde precisión, para así obtener una componente inicial «rápida» del procesotransitorio, para posteriormente incrementar el paso después de que el procesotransitorio se atenúe.

170
Miguel Ocharán P.a
7.3.3 SOLUCIÓN DE ECUACIONES DIFERENCIALES RÍGIDAS.MÉTODO DE GIRPara la solución del problema mencionado anteriormente, Gir (investigador)
realizó una familia de algoritmos, que son rígidamente estables, evidentes y devarios pasos; en los cuales la magnitud del paso se limita sólo con el error metódicolocal admisible (permisible). Por ellos los algoritmos indicados anteriormente sonideales para la variación automática del orden del método y de la magnitud delpaso.
Gir procesó un programa de alta eficacia para integrar el sistema de «N» ecuacionesdiferenciales simples, además este programa contiene un algoritmo estable y rígidode variación automática del orden y magnitud del paso. Este es el programaDVOGER.
El método de Gir de orden «K» ,viene a ser un método evidente, obtenido bajo lassiguientes consideraciones:
P=k-1, b0=b1=b2=…=bk-1=0 (7.69)
En la ecuación (7.11)
Xn+1=ao(k)Xn+a1(k)Xn-1+a2(k)Xn-2+…+ak-1(k)Xn-k+1 +h[b-1(k)f(Xn+1,tn+1)] (7.70)
Donde los coeficientes ai son reemplazados por ai(k) para obviar el orden «K» delmétodo y su dependencia del orden.
Para K=1, obtenemos el método de Gir de primer orden:
Xn+1=Xn+hf(Xn+1,tn+1) (7.71)
Vemos que la ecuación (7.71) es el método no evidente de EULER, el cual fuededucido anteriormente.
Para K=2. obtenemos el método de Gir de segundo orden:
(7.72) )),(32(
31
34
1111 ++−+ +−= nnnnn tXfhXXX

171
Máquinas Asincronas - Estados Estable y Dinámico
Para K=3, obtenemos el método de Gir de tercer orden:
(7.73) )),(116(
112
119
1118
11211 ++−−+ ++−= nnnnnn tXfhXXXX
Las fórmulas de los métodos de Gir de mayor orden, son desarrolladas con muchosvalores, debido a lo cual no las escribiremos.
Para la solución de sistemas de ecuaciones diferenciales, es lógico emplearprogramas conocidos, los cuales han sido probados experimental y técnicamentedurante varios años y gracias a los cuales se les puede emplear confiablementepara un empleo masivo.
• EL PROGRAMA RKGS - que realiza el método de Runge-Kutta de cuartoorden.
• EL PROGRAMA DVOGER - que por selección, puede realizar el método deGir ó el método de Adams - Moultown (con el algoritmo de variación automáticadel paso de integración y del orden del método).
7.4 PROGRAMAS RKGS Y DVOGER
El programa RKGS se encuentra dentro de la biblioteca de sub-programasmatemáticos SSPLIB.
El programa DVOGER, se encuentra dentro del programa NAP de matemáticaspara el cálculo de circuitos no lineales.
Para entrar al programa RKGS se realiza el siguiente procedimiento:
CALL RKGS (prmt, y, dery, ndim, ihlf, FCT, OUTP, aux)
Donde:
prmt-serie masiva de dimensión no menor a 5
prmt(1)- valor inicial del intervalo de integración.
prmt(2)- valor final del intervalo de integración.

172
Miguel Ocharán P.a
prmt(3)- valor inicial del paso de integración.
prmt(4)- magnitud del error máximo permisible.
prmt(5)- parámetro controlador: El programa dispone.
prmt(0) cuando el proceso de cálculo se realiza normalmente; el operadorpuede interrumpir el proceso de cálculo, variando el valor de prmt(5) aun valor diferente de cero en el subprograma externo OUTP (ver másabajo).
y cuando se entra al programa la serie de valores iniciales, cuando se saledel programa- serie de valores secuentes.
dery para entrar la serie de coeficientes variables (la suma de los cuales debeser igual a 1), para salir- serie de valores secuentes de derivadas variables.
ndim número de ecuaciones del sistema.
Ihlf número de fraccionamientos realizados en el paso de integración, ademásde esto en caso de que el número de fraccionamientos sea mayor a 10,entonces ihlf=11; si el valor inicial del paso es prmt(3)=0, entonces ihlf=12;si el signo del paso inicial prmt(3) no coincide con el signo de la diferencia(prmt(2)-prtmt(1)), entonces ihlf=13.
FCT dirección del subprograma externo, que es llamado de RKGS la cualcalcula los miembros de la derecha del sistema de ecuacionesdiferenciales:
FCT(x, y, dery) (Donde: x- valor continuo del tiempo dentro del intervalode integración).
OUTP dirección del subprograma externo, llamado desde RKGS, la cual realizala deducción de los valores intercalados de las variables en los puntosde división del intervalo de integración:
OUTP(x,y,dery,ihlf,ndim,prmt) (en este se puede variar el parámetrocontrolador prmt(5))
aux serie complementaria de trabajo, que tiene las siguientes dimensiones(8,ndim).
Para entrar al programa DVOGER se realiza el siguiente procedimiento:
CALL DVOGER(DFUN,y,t,n,mth,maxder,jstart,h,hmin,hmax,eps,ymax,error,wk,ier)
Donde :

173
Máquinas Asincronas - Estados Estable y Dinámico
DFUN Subprograma externo de cálculo del miembro derecho del sistema deecuaciones diferenciales:
DFUN(yp,tp,n,dy,pw,ind)
Donde:
yp conjunto de valores continuos de las variables y sus derivadas, condimensión(8,n); la solución continua se encuentra en la primera columnade este conjunto de valores: X(1)=yp(1,1),X(2)=yp(1,2),...X(n)=yp(1,n):
tp valor continuo del tiempo:
n número de ecuaciones del sistema
ind parámetro controlador: si ind=0, entonces DFUN debe calcular elconjunto «n» de miembros derechos del sistema de ecuaciones yconservar este cálculo en dy(n); si ind=1, entonces DFUN además decalcular el conjunto «n» debe de conservar el cálculo en la matrizpw(n,n) (El conjunto «n» se calcula sólo si se llama el programaDVOGER con mth=1).
y conjunto de variables de dimensión (8,n),que contiene variables y susrespectivas derivadas; al principio de la integración este debe de conteneren la primera columna los valores iniciales de las variables:
t valor continuo de la variable independiente de integración (tiempo); cuandose inicia la integración debe de contener un tiempo inicial «to».
n orden del sistema de ecuaciones (cantidad de ecuaciones en el sistema).
mth símbolo del método de integración: mth=0-método de Adams deprognóstico-corrección; mth=1-método de Gir con variación del ordendel método, que es efectivo para la resolución de ecuaciones rígidas(paraesto el operador debe de realizar el cálculo en Yakobiana en el comandoDFUN). mth=3-método de Gir con variación de orden del sistema (paraesto DVOGER automáticamente calcula el JACOBIANO):
maxder orden máximo del método: maxder<8 para el método de Adams ymaxder<7 para el método de Gir.
Jstart parámetro controlador, que toma los siguientes valores:
-1 repetir el último paso con un nuevo valor de «h».
0 iniciar la integración (al primer llamado)
+1 continuar la integración.

174
Miguel Ocharán P.a
Cuando se sale de DVOGER jstart es igual al orden continuo del método empleadodurante la integración.
h cuando se entra al programa la magnitud del paso continuo con la cualva ha ser realizada la variación de t, cuando se sale del programa, lamagnitud recomendada del siguiente paso, que se deduce de lascondiciones de integración económica para lograr una precisión dada.
hmin magnitud del paso mínima permisible.
hmax magnitud del paso máxima permisible.
eps criterios de error relativo máximo permisible.
ymax- conjunto de variables, con dimensión «n», que contiene valores máximoabsolutos de las variables (antes de iniciar la integración estos se toman=1).
error- conjunto de valores con dimensión «n» que contiene errores locales desolución.
wk- conjunto de valores empleado constantemente, con dimensión (17, n)para mth=0 y (n,n+17) en todos los demás casos;
Ier- símbolo de errores, que se genera durante la integración.
Los programas RKGS y DVOGER junto con los diferentes métodos de integración,realizan aplicaciones en programación. El programa RKGS representa un sistemacerrado de autosuficiencia, que realiza la interación en un intervalo dado de tiempo,los medios de control de la correcta realización de la integración son limitados. Elprograma DVOGER es al contrario, pues representa a un integrador de un solopaso, el cual controla el programa en utilización para el análisis y selección de laestrategia y táctica de cálculos posteriores al finalizar el cálculo de cada paso deintegración, gracias a esta ventaja se permite crear programas más flexibles, quereaccionan de la misma forma hacia los efectos externos.
7.5 CALCULO TERMICO EN ESTADO DINAMICO
7.5.1. Sistema de Ecuaciones Diferenciales de PoissonEn la mayoría de casos el método del Circuito Térmico Equivalente (CTE) seutiliza para determinar las temperaturas medias en el régimen de funcionamientocontinuo o estado estable de operación, pero este método también se puede utilizarpara calcular con muy buena aproximación los valores de temperatura en el estadotransitorio o dinámico de la máquina.

175
Máquinas Asincronas - Estados Estable y Dinámico
Aun cuando la construcción de una máquina eléctrica sea relativamente simple,desde el punto de vista térmico, cualquier construcción es un sistema complejo deelementos correlacionados, donde los procesos se describen matemáticamentepor el sistema de ecuaciones diferenciales de Poisson en cada elemento conductorde calor.
Las condiciones límites de interrelación e interdependencia para estas ecuacionescomplican la solución. El dejar de analizar el campo de temperaturas al interior decada elemento nos permite representar los procesos térmicos por medio de unsistema de ecuaciones diferenciales lineales simples de primer orden. El númerode estas ecuaciones depende del número de cuerpos en la que se subdivide lamáquina.
El estado térmico del cuerpo «n» se describe por la siguiente ecuación diferencialde balance térmico:
( )( ) Pnni
dtdCn in
niq
1i
n +θ−θΛ=θ ∑
−
= (7.74)
Donde:
Cn : capacidad térmica del cuerpo «n»
θn : temperatura del cuerpo «n»
θi : temperatura del cuerpo «i»
q : cantidad de cuerpos relacionados térmicamente con el cuerpo analizado«n»
Λin : transmisión térmica desde uno de los cuerpos vecinos «i» hacia el cuerpo«n»
Pn : pérdida de potencia en el cuerpo «n»
t : tiempo
Para determinar las características del estado térmico de la máquina que trabajaen los estados estable y dinámico es necesario resolver el siguiente sistema deecuaciones:

176
Miguel Ocharán P.a
( )( ) ( )
( )
( ) ( )( ) ⎟⎟
⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
θΛ⎟⎟⎠
⎞⎜⎜⎝
⎛Λ−
θ
θΛ⎟⎟⎠
⎞⎜⎜⎝
⎛Λ−
θ
θΛ⎟⎠
⎞⎜⎝
⎛Λ−
θ
∑∑
∑∑
∑∑
≠
=
≠
=
≠
=
≠
=
==
n
n1q
1i
n1q
1i
nn
2
21k
1i
21k
1i
22
1
n
1i
m
2i
11
Piinindt
dC
....................
Pi2i2idt
dC
Pi1i1idt
dC
(7.75)
Donde:m: cantidad de cuerpos relacionados térmicamente con el primer cuerpo.k: cantidad de cuerpos relacionados térmicamente con el segundo cuerpo.
7.5.2. Sistema de Ecuaciones Diferenciales o de Poisson para el MotorAsíncrono del tipo cerradoSuponiendo que la resistencia térmica entre la carcasa y las tapas laterales es
cero, que la transmisión térmica en el eje es despreciable y que todo el esquemaes simétrico, se puede simplificar el circuito térmico equivalente mostrado en laFigura 6.3.
Por tanto, utilizando los símbolos y esquemas desarrollados en el Capítulo 6,podemos establecer el siguiente conjunto de ecuaciones diferenciales paradeterminar el comportamiento térmico del motor asíncrono del tipo cerrado.
( ) 15A31n1A
1n
11 P
dtdC +θΛ+θΛ+θΛ+Λ−=θ
( 133 dt
dC Λ−=θ (4
4 dtdC Λ−=θ
( ) 157k15k
55 P
dtdC +θΛ+θΛ+θΛ+Λ−=θ
Λ∆

177
Máquinas Asincronas - Estados Estable y Dinámico
( ) 01074
16
10
166 cmcm
dtdC θΛ+θΛ+θΛ+θΛ+Λ+Λ−=θ
∆∆
( ) 01105k67
110k
77 cmcm
dtdC θΛ+θΛ+θΛ+θΛ+Λ+Λ−=θ
( )D/*PPP 2313 ++= ll
( )D/*PPPP 22515 +−+= ll
C400 °=θ (7.76)
* Significado y cálculo de los coeficientes C:
C1:Capacidad térmica del devanado del estator
C3:Capacidad térmica de los dientes del estator
C4:Capacidad térmica del núcleo del estator
C5:Capacidad térmica del aire interno
C6:Capacidad térmica de la parte de la carcasa que envuelve el núcleo delestator
C7:Capacidad térmica de las otras partes de la carcasa
Tales coeficientes se determinan mediante la fórmula (7.77):
Ci = ci * Gi
Donde: ci: coeficiente específico de velocidad de variación de la capacidad térmicade cada elemento «i» en función del material y expresado en joule/°C-gr.
Los valores de ci, para los diferentes materiales están consignados en la Tabla 6-1.

178
Miguel Ocharán P.a
Gi: Peso del elemento «i». Este valor debe expresarse en gramos.
Los valores pertinentes han sido calculados en el Capítulo 4, con excepción delvolumen interno del aire y de las dos partes de la carcasa las cuales se dan en elsiguiente cuadro de fórmulas.:
• Carcasa considerando solo el núcleo
( ) ( ) ⎥⎦
⎤⎢⎣
⎡++⎟
⎠⎞
⎜⎝⎛+−
πγ= kcbbbbhp
31NpDD
4Gctn 11
p1p
11p
1p
21a
2cm1cl (7.78 - a)
• Carcasa de las otras partes
( ) ⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ ++⎟
⎠⎞
⎜⎝⎛ +
πγ+−
= µ 4DD
2DDhh2GtcnGcto
21a
2cm1acm
fccm1
1cm
l
ll(7.78- b)
• Volumen de aire interior
( ) ( )4
DDhGof22i
21a1B
o−−π
γ= πl (7.78 - c)
Por otra parte, para poder establecer el valor medio de sobre elevación de latemperatura de la máquina asíncrona durante su estado estable bastará establecerlas siguientes aproximaciones:
,0dt
dC nn →
θ= para todo elemento «n»
7.6 PROGRAMAS COMPUTACIONES DESARROLLADOS
7.6.1 IntroducciónEn el acápite se exponen las aplicaciones de los Programas desarrollados,
cuyo software se adjuntan en forma de material magnético al final del libro.En primera instancia se detallan las hojas que contienen la data de los respectivosprogramas. Estos programas data recogen los parámetros de cálculo definidossegún los métodos convencionales y a su vez se constituyen en los valores inicialespara los determinados procesos.

179
Máquinas Asincronas - Estados Estable y Dinámico
Cada Programa contiene los SubProgramas xxx.DAT, xxx.EXE, y xxx.Grapher;para su debido procesamiento, así como el SubPrograma .xxx.FOR.
Para el caso del análisis del comportamiento electromagnético sin considerar losefectos térmicos se muestran las características para velocidad (rad/seg), corrienteen estator, corriente en rotor y torque. Se han considerado condiciones de vacío ycarga nominal. Con este propósito se aplican los Programas 1,3, y 4.
Por otra parte es factible calcular los efectos térmicos sin considerar los procesoselectromagnéticos dinámicos, tanto para los estados estable así como el estadodinámico desde el punto de vista térmico. Aplicamos el Programa de CálculoTérmico denominado Teplo.
Finalmente, consideramos ambos efectos: electromagnéticos y térmicos en formasimultánea. El proceso de cálculo lo efectuamos a través del Programa ELMT.En está aplicación, como se indicó anteriormente, se consideran los efectos deexpulsión de la corriente en el proceso de arranque. De igual manera se analiza elcomportamiento para carga nula (vacío), marcha normal, con torque variable ymarcha a plena carga.
7.6.2 Aplicaciones de los ProgramasCon la Aplicación de los Programas 1 y 3 se han calculado las características
dinámicas bajo las siguientes condiciones:
Gráfica PR 11 (PR31)Tensión Nominal, Momento de Inercia Nominal y momento de Carga nulo (vacío).
Gráfica PR12 (PR32)Tensión Nominal, Momento de Inercia Nominal y 50% de Momento de Carga
Gráfica PR13 (PR33)Tensión Nominal, Momento de Inercia Nominal y Momento de Carga Nominal
Aplicando el Programa 4 se han calculado y se muestra las gráficas (8), delas características dinámicas bajo el evento de inversión de giro, con las siguientescondiciones:
Gráfica PR41Tensión Nominal, Momento de Inercia Nominal, Momento de Carga Nulo yReversión a los 0.20 segundos de arranque

180
Miguel Ocharán P.a
Gráfica PR42Tensión Nominal, Momento de Inercia Nominal, Momento de Carga Nominal,tiempo de reversión a los 0.20 segundos luego del arranque.
La Aplicación del Programa para el Cálculo Térmico «Teplo» se harealizado considerando dos escenarios, el primero operación en estado estable yel segundo: operación en estado dinámico. En ambos casos prescindimos deconsiderar los efectos electromagnéticos dinámicos de operación de la máquina.El proceso de estabilización térmica es mucho más lento que el de un fenómenoelectromagnético. Por ello el tiempo de análisis no es de 0,3 ó 0,5 segundos sino dedos o tres minutos para observar la tendencia. Más aún, estimamos que el procesode estabilización térmica alcanza dos o tres horas en condiciones de operacióncontinua. Los resultados se muestran en las Gráficas TEPLO 1 y TEPLO 2respectivamente.
Finalmente, la Aplicación del Programa ELMT nos ofrece la posibilidad deexplorar el comportamiento de la máquina considerando en forma simultánea losfenómenos electromagnéticos y térmicos. Los oscilogramas, tanto para lascaracterísticas de operación de la máquina como para los efectos desobrecalentamiento se expresan tanto para su estado estable como para su estadodinámico. Se muestran las gráficas que reflejan el comportamiento de la velocidad,corrientes en el estator y rotor, torque, calentamiento en el devanado del estator,en los dientes y yugo del estator, en el aire interior de la máquina, en la carcasa enla parte periférica al núcleo y en la carcasa en las partes laterales. Son las gráficasELMT 1 a ELMT 10 respectivamente y los Índices ä»o «b» respectivamente sison condiciones de vacío o marcha normal.
7.6.3 Condiciones iniciales y datos de partidaSe muestran los listados de los programas MIG.DAT asociado al Programa 1,
M.DAT asociado al Programa 3 y MR.DAT asociado al Programa 4. los valoresson fundamentalmente los parámetros de diseño, obtenidos según el Capítulo I,para los valores de resistencias activas e inductivas del estator y rotorrespectivamente, la impedancia mutua estator — rotor, el número de pares depolos, el valor incremental de tiempo para efectos de cálculo, los valores de latensión de fase, frecuencia nominal y ángulo de desfasaje entre vector de fase Adel estator y la referencia, el momento de inercia del rotor, el valor de tiempo deanálisis y el momento de carga.
El programa M.DAT asociado al Programa 3, contiene además los valores relativosa la geometría de las ranuras del rotor, con el fin de determinar los cálculos relativos

181
Máquinas Asincronas - Estados Estable y Dinámico
al efecto de expulsión de la corriente y datos requeridos para la subrutina SPLINE,la que contribuye al cálculo de los flujos de dispersión. Adicionalmente se incluyenlos valores corregidos de r2 y x2 para el arranque.
El programa MR.DAT incluye lo señalado para MIG.DAT además de el valorinicial del tiempo en que se produce la inversión de giro del motor.
El Programa TEPLO.DAT lista los valores de las resistencias térmicas de laspartes involucradas en el análisis, los valores de pérdidas, que como sabemos seconstituyen en las fuentes de calor en el esquema térmico equivalente, el tiempode análisis de los procesos y algunos datos de la geometría de la máquina.
Finalmente el Programa KLMT.DAT lista los valores de partida e iniciales enforma similar a los dados en M.DAT para los efectos electromagnéticos yTEPLO.DAT para los fenómenos térmicos. En este caso prolongamos el tiempode análisis a 1 minuto.
7.6.4 Análisis y discusión de resultadosA partir de los Oscilogramas obtenidos, podemos efectuar algunas apreciaciones:
a) Proceso de Arranque para diferentes momentos de cargaLos valores de velocidad de giro, corrientes de estator y de rotor demoran másen estabilizarse, conforme se incrementa el momento de carga del motor. En elcaso de arranque en vacío, esto es con momento de carga nulo, la velocidad esligeramente superior a la obtenida a plena carga, la corriente del rotor sin sercero tiende a ese valor y la corriente en el estator es aproximadamente igual ala de magnetización. En plena carga el valor de la corriente de estator esmayor que en vacío, esto se puede comprobar tanto para el Programa 1 comopara el Programa 3 que considera el efecto de expulsión de la corriente.(Gráficas PR11, PR12, PRL3, PR31, PR32, PR33)
b) Procesos transitorios en régimen de inversión de giroProducida la inversión de giro, los tiempos requeridos para que se estabilicen lavelocidad, corrientes de estator y de rotor, así como el momento de cargallegan hasta el doble del tiempo empleado luego de producido el arranque normal.Los valores de corriente de rotor y estator, durante el transitorio de inversiónalcanzan valores de 60" o a 80% de los valores transitorios análogos en elarranque. (Gráficas PR41 y, PR42).

182
Miguel Ocharán P.a
c) Procesos TérmicosDe las gráficas podemos colegir que la temperatura del aire interior y de losdientes del estator son los que sufren más rápidamente el proceso decalentamiento o elevación de temperatura. Sin embargo dada la naturaleza delos elementos diferentes (aire y hierro) los procesos no responden a similarescaracterísticas de calentamiento. Por otra parte, como era de esperarse, en elproceso de arranque con carga el calentamiento es ligeramente mayor que enel de vacío.
d) Procesos CombinadosDel análisis de los procesos combinados, podemos establecer que en el casoelectromagnético se produce cierto retardo, con relación al proceso simple, enel efecto de estabilización. Por otra parte el programa puede calcular el valorestable de las temperaturas, pero ello requiere un tiempo muy alto en computo.Las cargas afectan los fenómenos y se nota marcadamente la influencia.
7.7 PROCEDIMIENTO EXPERIMENTAL PARA VERIFICACIÓN DEL MODELO
7.7.1 OBJETIVOEl objetivo del presente libro es el modelamiento de las ecuaciones de
funcionamiento de la máquina asíncrona en los ejes de coordenadas α, β conflujos totales variables y; el estudio por computadora de los regímenes transitoriosdel motor asíncrono.
7.7.2 SECUENCIA DE LA EXPERIENCIA
Realizar el análisis del modelo matemático del motor asíncrono, obtenido conbase en ecuaciones diferenciales, en las cuales las variables dependientes sonlos flujos totales.
Preparar los datos necesarios para el cálculo de tres motores asíncronos.
Realizar el cálculo de proceso transitorio durante el arranque en vacío de cadauno de los motores asíncronos, comparar el arranque de cada uno de los motoresy sacar conclusiones acerca del efecto de la potencia del motor sobre la duracióny el carácter del proceso transitorio de arranque.
Para uno de los motores asíncronos realizar el arranque bajo carga, con cargasiguales a 0,05; 0,5 y 3,0 de la carga nominal y sacar conclusiones acerca delefecto del par de resistencia de la carga sobre la duración del proceso transitorio

183
Máquinas Asincronas - Estados Estable y Dinámico
durante el arranque, la sobre elevación de la corriente de arranque y sobre elpar de arranque, así mismo sacar conclusiones acerca de las limitaciones delempleo del modelo matemático.
Para el motor asíncrono seleccionado en el punto anterior, realizar la inversiónde giro del motor bajo carga igual a 0,1 de la carga nominal.
Realizar el cálculo de los procesos transitorios durante la parada de cada unode los motores asíncronos cuando estos están trabajando en vacío, compararestas características de parada de los motores y sacar conclusiones acerca delefecto de la potencia del motor sobre la duración y el carácter del transitoriode la parada.
Para uno de los motores asíncronos realizar el análisis del efecto de la frecuenciade alimentación (f, var) sobre la característica de arranque del motor en vacío
7.7.3 RECOMENDACIONES PARA LA REALIZACIÓN DE LAEXPERIENCIAPara la solución del sistema de ecuaciones diferenciales (7.44) conjuntamente
con las ecuaciones (7.35), (7.36) y (7.43) y (7.45), se ha realizado un programa.
La diferenciación numérica de (7.44) se realiza gracias al método de RUNGE-KUTTA
Los datos iniciales para la realización de la presente experiencia se subdividen en:Parámetros físicos y matemáticos.
Los parámetros físicos son aquellos que describen en forma concreta al motorasíncrono, modelado de acuerdo al sistema de ecuaciones (7.44).
Los parámetros matemáticos son los que controlan el proceso de integraciónnumérica.
Las variables independientes del sistema de ecuaciones diferenciales (7.44), sonlos flujos totales ψψψψψsααααα, ψψψψψsβββββ, ψψψψψrααααα, ψψψψψrβββββ y la velocidad de giro del rotor ωr. Todos losdemás parámetros son datos de valores concretos para cada motor modelado.
Para proceder con las secuencias 3, 4 y 7 de la experiencia se debe de emplear elprograma mig.exe. Los datos iniciales se deben de introducir mediante el archivomig.dat (como en el Anexo 1).

184
Miguel Ocharán P.a
Para proceder con la secuencia 5 de la experiencia , se debe de emplear el archivomr.exe. Los datos iniciales se deben de introducir mediante el archivo mr.dat.(como en el Anexo 2). Para proceder con la secuencia 6 de la experiencia se debede emplear el archivo ma.exe. Los datos iniciales se introducen mediante el archivoma.dat (como en el Anexo 3).
Como ejemplo de la introducción de datos iniciales, tenemos los anexos 1, 2 y 3,los cuales corresponden a motores de diferentes potencias.
En las Figuras A y B se muestran los oscilogramas de arranque en vacío de unmotor de potencia media (3 kW).
En la Figura C se muestra el oscilograma de la inversión de giro y en la Figura Del oscilograma de la parada de un motor asíncrono de mediana potencia.
Durante la introducción de valores numéricos de los datos iniciales mediante losarchivos mig.dat,mr.dat y ma.dat, se deben de utilizar sólo 5 cifras. (5 posiciones).
Los resultados de los cálculos se llevan a los archivos de números:
acl.dat, la función ω(t)
ac2.dat, la función UA (t)ac3.dat, la función IA(t)
ac4.dat, la función M(t).
Para representar los resultados de los cálculos en forma de gráficos se recomiendaemplear, el programa GRAFER, predestinado para el procesamiento gráfico dedatos numéricos masivos.
Además es necesario denotar, que con ayuda de los programas mig.exe, mr.exey ma.exe se puede realizar el análisis del efecto de la variación de diferentesparámetros sobre las características de los procesos transitorios, por ejemplo dela tensión de alimentación, de la amplitud de la tensión de alimentación, de la faseinicial de la tensión, de la magnitud del momento de inercia, etc. Así mismo esposible la combinación variada de parámetros iniciales. De igual forma serecomienda a los estudiantes realizar investigaciones específicas de diferentecarácter de acuerdo al tema en calidad de investigación aplicada, cuyos contenidosdeben de recomendarse por catedráticos de la especialidad.

185
Máquinas Asincronas - Estados Estable y Dinámico
7.7.4 CUESTIONARIO
• Con qué finalidad se modelan los procesos de funcionamiento de la máquinaasíncrona en los ejes de coordenadas α y β.
• Explique el sentido físico de las inductancias totales Ls y Lr de las ecuacionesque describen el funcionamiento de la máquina asíncrona.
• A qué es igual la inductancia mutua entre los devanados del estator, los cualesse ubican en los ejes α y β.
• Formule las principales suposiciones para la realización del modelo matemáticodel motor asíncrono en los ejes de coordenadas a y b.
• Explique el algoritmo de la diferenciación numérica del sistema de ecuacionesdiferenciales por los métodos de Runge-Kutta y Dvoger.
• Explique los procesos físicos, que suceden en la máquina asíncrona en losregímenes de arranque e inversión de giro.
• Qué procesos surgen en el motor asíncrono durante su parada.

186
Miguel Ocharán P.a

187
Máquinas Asincronas - Estados Estable y Dinámico
BIBLIOGRAFÍA
1- Introducción a las Máquinas Eléctricas TransformadoresGeorge McPherson. Universidad de Missouri-RollaEditorial LIMUSA-1987
2- Conversión de Energía ElectromecánicaGourishankar. Universidad de IllinoisEditorial Alfaomega 1990
3- Máquinas Eléctricas (3 Tomos)A.V. Ivanov-SmolenskiEditorial Mir-Moscu. 1988
4- Máquinas Eléctricas M.P.Kostenko.,L.M. PiotrovskiEditorial Mir-Moscu. 1976
5- Métodos de Investigación Matemática de las Máquinas EléctricasGruzov L.N.Editorial Mir-Moscu. 1953
6- Procesos Transitorios en las Máquinas de Corriente AlternaKasovski E. Ya.Editorial Mir-Moscu. 1962
7- Manual de Máquinas Electromecánicas Soluciones Numéricas en el CálculoCientíficoKeyncad. Editorial Me Graw Hill, 1986.
8- Alger, P.L. The Nature of Polyphase Induclion Machines, Nueva York: JohnWiley & Sons,Inc., 1951.
9- Alger, P.L. y Erdelyi, E. «lUectromechanical Enery Conversión», Electro-Technology,Septiembre 1961.
10- Bewley, L.V. Alternating Current Machinery, Nueva York: The MacmillanCompany,1949.
11- Ook, J. W. «Squirrel-Cage Induction Motors Under Duty-Cicle Conditions»,ElectricalManufacturing, febrero 1956.
12- Crosno, C.D. «Fundamentals of Electromechanical Conversion, Nueva York:HarcourtBrace, Jovanovich, Inc., 1968.

188
Miguel Ocharán P.a
13-Daniels. The Performance of Electrical Machines, Nueva York: McGraw-Hill,Inc., 1968.
14- Fitzgerald, A. E. y Kingsley, C. The Dynamics and Statics of ElectromechanicalEnergy Conversion, 2a ed., Nueva york: McGraw-Hill, 1961.
15- General Principles upon Wich Temperature Limits Are Based in the Rating ofElectrical Equipment, Nueva York: American Institute of Electrical Engineers.Publicación num. 1.
16- Graphical Symbols for Electrical Diagrams. (ICI.) Nueva York: NationalElectrical Manufacturers Association.
17- Levi, E. y Panzer, M. Electromechanical Power Conversion, Nueva York:McGraw-Hill, 1966.
18- Majmudar, H. Introduction to Electrical Machines, Boston: Allyn and Bacon,1969.Motor and General Standards. (MG1.) Nueva York: National ElectricalManufacturers Association.
19- Nasar, S. A. Electromagnetic Energy Conversion Devices and Systems,Englewood cliffs, N. J.:Prentice-Hall, Inc.,1970.
20- O’Kelly y Simons. An Introduction to Generalized Electrical Machine Theory,Nueva York:McGraw-Hill, 1968.
21- Skilling, H. H. Electromechanics: A First Course in Electromechanical EnergyConversion,Nueva York: Wiley/Interscience, 1962.
22- White, D. C. Y Woodson, H. H. Electromechanical Energy Conversion, NuevaYork:Wiley/Intercience, 1959.
23- Wilt, HJ. «Circuit Factors in Molar Protection», Electrical Manufacturing, junio1959.
24- Kostenko M. P. Máquinas Eléctricas. Parte especial 1949-712 pág.25- Alexeev A. E. Construcción de Maquinas Eléctricas, 1958- 426 pág.26- Korn G. Y Korn T. Guía de matemáticas, 1970-720 pág.27- Adkins B. Teoría general de las máquinas eléctricas, 1960-272 pág.28- A.V. Ivanov- Smolenski Máquinas Eléctricas, Tomo 3, 1969-304 pág.29- Sergueev P. S., Vinogradov N. V., Goriainov F. I. Diseño de las máquinas
eléctricas, 1969,632 pág.30- Postnikov I.M. Diseño de las máquinas eléctricas, 1960-910- pág.31- Danilevich Ya. B., Kasharski E.G. Pérdidas adicionales en las máquinas
eléctricas, 1963-244 pág.

189
Máquinas Asincronas - Estados Estable y Dinámico
32- Shliguin V.V. Cálculos de la resistencia y dimensiones de las máquinas eléctricas,1963-320 pág.
33- Filippov I. F. Fundamentos del intercambio de calor en las máquinas eléctricas,1974-384 pág.
34- Bernshtein L. M. Aislamiento de las máquinas eléctricas de uso industrialgeneral, 1971-368 pág.
35- Siromiátnikov I. A. Regímenes de trabajo de los motores eléctricos asíncronosy sincrónicos, 1953-528 pág.
36- Gruxov L.N. Métodos de investigación matemática de las máquinas eléctricas,1953-264 pág.
37- Kazovski E. Ya. Procesos transitorios en las máquinas eléctricas de corrientealterna, 1962-624p.
38- Kovach K.P., Rats I. Procesos transitorios en las máquinas de corriente alterna,1963-744 pág.
39- Treschev I.I. Métodos de Investigación de las procesos electromagnéticos enlas máquinas de corriente alterna, 1969-235 pág.
40- Póstnikov I.M. Teoría generalizada y procesos transitorios de las maquinaseléctricas, 1966-436 pág.
41- Abramowich, M., y I. A. Stegun (eds.) handbook. Of Mathematical Funtionswith Formulas, Graphs, and Mathematical Tables, National Boureau ofStandards, (reimpreso en Nueva York: Dover 1965.), 1964.
42- Allgower, E.L., K. Glasshoff y H. O. Peitgen (eds.). Numerical Solution ofnonlinear Equations: Lecture notes in mathematics 878, Nueva York, Springer-Verlag, 1981.
43- Aziz, A.K. (ed.) Numerical Solution of Differentiel Equiatins, Nueva York,Van Nostrand, 1969.
44- Babuska, I.M. Prager y E. Vitasék, Numerical Processes in DifferentialEquiations, Nueva Cork, Wiley-interscience, 1969.
45- Becker, E.B. G.F. Carey y J.T. Oden, Finite Elements: An Introduction, Vol. 1,Englewood Cliffs, N.J., prentice-Hall, 1981.
46- Botha, J.F. y G.F. Pinder, Fundamental Concepts in the Numerical Solution ofDifferential Equations, Nueva York, Wiley, 1983.
47- Burraje, K. A,. special family of Runge-Kutta methods for solving stiffdifferential equations, BIT 18, 22-41, 1978.
48- Cody, W.J., «The construction of numerical subroutine libraries», SIAMREV16, 36-46, 1974.
49- Dekker, K., y J.G. Verwer, Stability of Runge-Kutta Methods for stiff NonlinearDifferential Equations, Amsterdam, Elsevier Science, 1984.

190
Miguel Ocharán P.a
50- Dieudonné, J., Foundations of Modern Analysis, Nueva York, Academic Press,1960.
51- Evans, D.J. (ed), Software for Numerical Mathematics, Nueva York, AcademicPress, 1974.
52- Kaps, P., y P. Rentrop, «Generalized Runge-Kutta of order four with step sizecontrol for stiff ordinary differential equatins», NM 33, 55-68, 1979.
53- Lawson, C. L., R. J. Hanson, D. R. Kincaid y F. T. Krough, «Basic linearalgebra subprograms for Fortran usage», ACMTONS 5, 308-323, 1979.
54- Marsden, M.J., «An identity for spline functions with applications to variation-diminishing spline approximation», AT3, 7-49, 1970.
55- Mitchell, A. r., y R. Wait, The Finite Element Method in Partial DifferentialEquations, Nueva York, Wiley, 1977.
56- NAG, NAG Fortran Library Manual, Downers Grove, I11,. NAG, Inc., 1990.57- Strang, G., y Fix, An Análisis of the Finite Element Method, Englewood Cliffs,
N. J., Prentice Hall, 1973.58- Thomas, B., «The Runge-Kutta methods», Byte, Abril, 191-210, 1986.59- Motores de inducción – Instrucciones ABB Motors.60- Kopilov. Modelos Matemáticos para Máquinas Eléctricas., Moscú 1987.61- Kiriahine, Ocharán, Quispe. Teoría y Práctica de Modelos Matemáticos de la
Máquina Asíncrona, Edit UNSA, 2000.62- David Kincaid – Ward Cheney Análisis Numérico. Las matemáticas del cálculo
científico. Addison-Wesley Iberoamericana, 1994.63- A.M. Howatson-P.G. Luna-J.D. Todd. Tablas y Datos para Ingeniería.
AlfaOmega 1999.64- Ente Vasco de la Energía. EVE. Arranque Industrial de Motores Asíncronos.
Mc Graw Hill. 1995.65- Kerchner y Corcovan. Circuitos de Corriente Alterna. CECSA, 1986.66- Perry/Chilton. Manual del Ingeniero Químico. Quinta Edición.67- Hamdy A. Taha. Investigación de Operaciones. Una Introducción. Prentice
may 1998.68- GE Industrial Control Systems. AC Motor Selection and Application Guide,
1999.69- M. Katsman (Vers. Español. C. Tanca) Manual de Diseño y Construcción de
Máquinas Eléctricas. DAIME 1998.70- J. Meisel. Principios de Conversión de Energía Electromecánica. Mc Graw
Hill, 1968.

191
Máquinas Asincronas - Estados Estable y Dinámico
APENDICES
APENDICE 1
mig.datC Resistencia activa del estator (Rl =0.625)0.944C Resistencia activa del rotor (R2= 1.443)0.275C Reactancia inductiva del estator (XI =1.431)0.917C Reactancia inductiva del rotor (X2=1.41)0.685C Reactancia inductiva entre el estator y rotor (Xm= 28.305)35.538C Número par de polos (p=2)2.0C Paso inicial de diferenciación (xt= 0.0001)0.0001C Tensión de alimentación (Ul=220.)220.C Frecuencia (f=60.)60.C Fase inicial de la tensión (g=0)0.C Momento de inercia (0.0075)0.0075C Tiempo máximo de cálculo (0.15)0.15C Par resistivo (0)0.

192
Miguel Ocharán P.a
APENDICE 2
mr.datC Resistencia activa del estator (R1 =0.625)0.36C Resistencia activa del rotor (R2= 1.443)0.4C Reactancia inductiva del estator (XI =1.431)0.955C Reactancia inductiva del rotor (X2=1.41)0.9C Reactancia inductiva entre el estator y rotor (Xm= 28.305)29.3C Número par de polos (p=2.)2.0C Paso inicial de diferenciación (xt=0.0001)0.0001C Tensión de alimentación (Ul =220.)220.C Frecuencia (f=60.)60.C Fase inicial de la tensión (g=0)0.C Momento de inercia (0.03)0.03C Tiempo máximo de cálculo (0.7)0.7C Par resistivo (50.0)50.0C Tiempo de inversión de giro0.03

193
Máquinas Asincronas - Estados Estable y Dinámico
APENDICE 3
ma.datC Resistencia activa del estator (Rl =0.625)0.36C Resistencia activa del rotor (R2= 1.443)0.4C Reactancia inductiva del estator (XI = 1.431)0.955C Reactancia inductiva del rotor (X2== 1.4J)0.9C Reactancia inductiva entre el estator y rotor (Xm=28.305)29.3C Número par de polos (p=2.)2.0C Paso inicial de diferenciación (xt=0.0001)0.0001C Tensión de alimentación (U1 =220.)220.C Frecuencia (t’=60.)60.C Fase inicial de la tensión (g=0)0.C Momento de inercia (0.03)0.03C Tiempo máximo de cálculo (0.7)0.7C Par resistivo (50.0)50.0C Tiempo de la parada0.3

194
Miguel Ocharán P.a
APENDICE 4
GRÁFICAS
FIGURA AOscilograma del par electromagnético y de la velocidad angular del rotor del motor4A315M8Y3 durante el arranque
FIGURA BOscilograma de corrientes, velocidad angular y par vs tiempo para un motor de 500 Kw
M3 r
M3
r
t, c0
0.1c
i
i
s
M3 r
t, c

195
Máquinas Asincronas - Estados Estable y Dinámico
FIGURA COscilograma del motor asíncrono de 2.2 kW durante la inversión de giro
FIGURA DVelocidad vs tiempo de un motor asíncrono durante su parada; a) motor asíncrono de 75kW b) motor asíncrono de 500 kW.
is
0
0
M3
r
t, c
0.1c
0.80.60.40.2
0
0.80.60.40.2
0 0.5 1.0 1.5 2.0 2.5 3.0
0.5 1.0 1.5 2.0 2.5 3.0a)
b) t (seg)
t (seg)
k =0.50c
k =0.55c
k =0.60c
k =0.65c
k =0.45c
k =0.50c k =0.55
c

196
Miguel Ocharán P.a
Se terminó de imprimir en losTalleres Gráficos de:
GRAFICA EL ROSARIO A. MEJIA Z. E.I.R.L.Jr. Chancay Nº 350Telefax: 425-0450
Lima - Perú

Miguel Angel Ocharán P., Doctor en Energética, combina, de maneraintensa y especial, tres características: la docencia, la científica y laprofesional. Lo usual, y común en nuestro país, es encontrar personas queson solamente una de las mencionadas. Es decir, o profesor, oinvestigador, o como en este caso ingeniero. Pocos hay que sean docentese investigadores; hay mas docentes que son profesionales en ejercicio ycarece nuestra sociedad, casi por completo, de profesionales que tambiénsean investigadores científicos. Por ello, el caso de Miguel Ocharán es tanespecial. En efecto un excelente profesor en las materias de Ingeniería deIluminación en el pregrado y de Máquinas Eléctricas Especiales en elposgrado en la Universidad de San Agustín, ejerce su profesión conniveles de calidad internacional (es responsable, por ejemplo, de losprogramas de iluminación de la nueva Universidad San Agustín, delEstadio Arequipa, de gran parte de los nuevos sistemas de iluminación ydel cableado subterráneo del Centro Histórico de Arequipa, etc.) y, talcomo lo pone de manifiesto en el presente libro, es poseedor de muypeculiares capacidades para la investigación científica. Nos entusiasma,particularmente, mas allá de los objetivos académicos-pedagógicos oestimulantes de su trabajo, utilice la modelación matemática y los métodosnuméricos, así como el análisis experimental, en relación a los motoresasíncronos. Entendemos que uno de los intentos de Ocharán, además delos teóricos y aplicativos en el campo estricto de su estudio, es demostrarcuan absolutamente necesario es el dominio y utilización de los métodosmatemáticos para el desarrollo de la investigación tecnológica en nuestroPerú.
La Asamblea Nacional de Rectores tuvo una extraordinaria iniciativa parapromover este tipo de investigaciones para apoyar a los poquísimos que,a pesar del desaliento, mantienen fe en sus potencialidades. Esperamosque la ANR fortalezca y amplié esta propuesta.
Enero, 2005.Juan Manuel Guillén Benavides