Embed Size (px)
Citation preview

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 1/16

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 2/16
applying NN to model unknown functions in dynamicsystems has been demonstrated in several studies [7–12]
As such, several flight control approaches using NN havebeen proposed. Among of them, approximate dynamicinversion with augmented NN was proposed to handleunmodelled dynamics in [13– 15], whereas neural dynamic
programming was shown to be effective for tracking andtrimming control of helicopters in [16]. During theadaptive trajectory control of autonomous helicopter in [17]and [18], the method of pseudocontrol hedging was usedto protect the adaptation process from actuator limits anddynamics. In [19], MIMO output feedback adaptive NNcontrol was proposed for an autonomous scale modelhelicopter mounted in a 2-degree-of-freedom (2DOF)platform. In [20], robust adaptive NN based on the mean
value theorem and the implicit function theorem wasproposed to handle the nonaffine nonlinearities in thehelicopter dynamics without the construction of the
dynamic inversion.
In this paper, motivated by [6], where the exact modeldynamics are known, we consider the altitude and yaw angletracking for a scale model helicopter mounted on anexperimental platform in the presence of model uncertainties,
which may be caused by unmodelled dynamics, sensor errorsor aerodynamical disturbances from the environment.Compared with the model-based control used in [6],approximation-based control using NN, proposed in thispaper, can accommodate the presence of model uncertainties,reduce the dependence on accurate model building, and thus,lead to the tracking performance improvement.
2 Problem formulation andpreliminaries
In the following study, ~ () ¼ ^() (), let k k denote the 2-norm, k kF denote the Frobenius norm and j j1 denote1-norm, i.e. given A ¼ [a ij ] [ R mn, k A k2
F ¼ tr{ A T A } ¼Pi , j a 2i , j , and j A j1 ¼
Pi , j ja i , j j. The following definition
and technical lemma are required in the subsequent controldesign and stability analysis.
Definition 1 [11] : The solution X (t ) is semiglobally uniformly ultimately bounded (SGUUB) if, for any compact set V0 and all X (t 0) [ V0, there exists an m . 0and T (m, X (t 0)) such that k X (t )k m for all t t 0 þ T .
Lemma 1: For a , b [ R þ, the following inequality holds
ab
a þ b a (1)
2.1 Helicopter dynamics
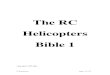
In this paper, we consider a VARIO scale model helicopter [6] which is mounted on an experimental platform as shown inFig. 1, where the xyz and x 1 y 1z1 reference systems represent
an inertial frame and a body fixed one, respectively. Inaddition, _f is the yaw rate and _g is the main rotor angular
velocity. The counterbalance weight compensates for the weight of the vertical column of the platform. Thehelicopter dynamics is described by Lagrangian formulationin the following [6]
D (q )€q þ C (q , _q )_q þ F (_q ) þ G (q ) þ D(q , _q ) ¼ B (_q )t (2)
where q , _q and €q are referred as the vectors of generalisedcoordinates, generalised velocities and generalisedaccelerations, respectively. In particular, q ¼ [q 1, q 2, q 3] T ¼
[z, f , g ] T with z as the attitude (z . 0 downwards), f asthe yaw angle and g as the main rotor azimuth angle;
_q ¼ [_q 1, _q 2, _q 3] T ¼ [_z, _f , _g ] T with _z as the vertical velocity,_f as the yaw rate and _g as the main rotor angular velocity;
€q ¼ [€q 1, €q 2, €q 3] T ¼ [€z, €f , €g ] T with €z as the vertical
acceleration €f as the yaw acceleration and €g as the main
rotor angular acceleration; D (q ) [ R 33 is the inertia matrix;C (q , _q )_q [ R 31 is the vector of Coriolis and centrifugalforces; F (_q ) [ R 31 is the vector of friction forces;G (q ) [ R 31 is the vector of gravitational forces;D(q , _q ) [ R 31 is the vector of the model uncertainties,
which may be caused by unmodelled dynamics, sensor errorsor aerodynamical disturbances from the environment;B (_q ) [ R 32 is the matrix of control coefficients; and thecontrol inputs t ¼ [t 1, t 2] T [ R 21 are the main and tailrotor collectives (swash plate displacements), respectively. By exploiting the physical properties of the helicopter, e.g. how the control inputs are distributed to the helicopter dynamics,
or the coupling relationship between the states, better performance can be achieved. To this end, we assume partialknowledge of the structure of the dynamics [6], although
Figure 1 Helicopter-platform [6]
942 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 3/16

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 4/16
The ideal weight vector W is defined as the value of W that minimises j1(Z )j for all Z [ VZ , R m, i.e.
W ¼ argminW
{ supZ [VZ
j f (Z ) W TS (Z )j}
In general, the ideal weights W are unknown and need to beestimated in control design. Let W be the estimates of W ,and the weight estimation errors ~ W ¼ W W .
2.2.2 Function approximation using MNN: In thispaper, we also consider nonlinearly parameterised MNN,
which is used to approximated the continuous function f (Z ) : R m ! R as follows
f (Z ) ¼ W TS (V TZ ) þ 1(Z )
where the vector Z ¼ [z1, z2, :::, zm, 1] T[ VZ , R mþ1 are
the input variables to the NNs; S () [ R l is a vector of knowncontinuous basis functions, with l denoting the number of neural nodes; W [ R l and V [ R (mþ1)l are adaptable
weights; and 1(Z ) is the approximation error which isbounded over the compact set VZ , i :e : j1(Z )j 1,8Z [ VZ where 1 . 0 is an unknown constant. According to the universal approximation property [21], MNN cansmoothly approximate any continuous function f (Z ) over a compact set VZ , R mþ1 to arbitrary any degree of accuracy as that
f (Z ) ¼ W TS (V TZ ) þ 1(Z ), 8Z [ VZ , R mþ1
where W and V are the ideal constant weights, and 1(Z ) is
the approximation error for the special case where W ¼ W
and V ¼ V . The ideal weights W and V are defined asthe values of W and V that minimise j1(Z )j for allZ [ VZ , R mþ1, i.e.
(W , V ) :¼ arg min(W ,V )
{ supZ [VZ
j f (Z ) W TS (V TZ )j}
Assumption 7: On the compact set VZ , the ideal NN weights W , V are bounded by
kW k wm, kV kF v m
In general, the ideal weights W and V are unknown andneed to be estimated in control design. Let W and V bethe estimates of W and V , respectively, and the weight estimation errors ~ W ¼ W W and ~ V ¼ V V .
Lemma 2 [11] : Using f mnn ¼ W TS ( V TZ ) to approximatethe ideal function f (Z ), its approximation error can beexpressed as
^
W
T
S ( ^
V
T
Z ) W
T
S (V
T
Z )
¼ ~ W T
(S S 0V TZ ) þ W TS 0 ~ V T
Z þ d u
where S ¼ S ( V TZ ), S 0 ¼ diag {S 01, S 02, . . . , S 0l } with
S 0i ¼ S 0(v Ti Z ) ¼d[s (za )]
dza
jza ¼v Ti Z
and the residual term d u is bounded by
jd u j kV kF kZ W TS 0kF þ kW kkS 0V TZ k þ jW j1
Throughout this paper, we employ sigmoidal functions asbasis functions for the MNN, which are defined by
s i (za ) ¼1
1 þ emza , i ¼ 1, 2, . . . , l (8)
where m . 0 is a design constant.
3 Control design
Motivated by the previous work on model-based control of helicopters [6], we will design adaptive neural control toaccommodate the presence of uncertainties in the dynamics(2), appearing in the functions D (q ), C (q , _q ), F (_q ), G (q ),D(q , _q ) and B (_q ). After some simple manipulations on (2)and (3), we can obtain three subsystems: q 1 subsystem (9),q 2 subsystem (10) and q 3 subsystem (11) as follows
d 11 €q 1 þ f 1(_q 3) þ g 1 þ D1(q , _q ) ¼ b 11(_q 3)t 1 (9)
d 22(q 3)d 33 d
2
23d 33
€q 2 þ c 22(q 3, _q 3)_q 2 þ c 23(q 3, _q 2)_q 3
þ D2(q , _q ) þd 23
d 33
(b 31(_q 3)t 1 c 32(q 3, _q 2)_q 2
f 3(_q ) g 3 D3(q , _q )) ¼ b 22(_q 3)t 2 (10)
d 22(q 3)d 33 d 223
d 22(q 3) €q 3 þ c 32(q 3, _q 2)_q 2 þ f 3(_q 3) þ g 3
þ D3(q , _q ) þd 23
d 22(q 3)(b 22(_q 3)t 2 c 22(q 3, _q 3)_q 2
c 23(q 3, _q 2)_q 3 D2(q , _q )) ¼ b 31(_q 3)t 1 (11)
In the following, we will analyse and design control for eachsubsystem. For clarity, define the tracking errors and thefiltered tracking errors as
e i ¼ q i q id , r i ¼ _e i þ li e i (12)
where li is a positive number, i ¼ 1, 2. Then, theboundedness of r i guarantees the boundedness of e i and _e i [22–25]. To study the stability of e i and _e i , we only needto study the properties of r i . In addition, the following computable signals are defined
_q ir ¼ _q id li e i , €q ir ¼ €q id li _e i
944 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 5/16
3.1 RBFNN-based control
In this section, we will investigate the RBFNN-based controldesign by Lyapunov synthesis to achieve the control objective.Regarding the obtained three subsystems (9) –(11), our control design consists of three steps: first, we will design
control t 1 based on the q 1 subsystem (9) second, design t 2based on the q 2 subsystem (10) and t 1; finally, analyse thestability of internal dynamics of q 3 subsystem (11).
3.1.1 q1 subsystem: Since _q 1 ¼ _q 1r þ r 1, €q 1 ¼ €q 1r þ _r 1,(9) becomes
d 11 _r 1 ¼ b 11(_q 3)t 1 f S 1,1 (13)
where
f S 1,1 ¼ d 11 €q 1r þ f 1(_q 3) þ g 1 þ D1(q , _q ) (14)
is an unknown continuous function, which is approximatedby RBFNN to arbitrary any accuracy as
f S 1,1 ¼ W T1 S 1(Z 1) þ 11(Z 1) (15)
where the input vector Z 1 ¼ [q 1, _q 1, q 2, _q 2, q 3, _q 3,_q 1d , €q 1d ]
T[ VZ 1 , R 8; 11(Z 1) is the approximation error
satisfying j11(Z 1)j 11, where 11 is a positive constant;W 1 are ideal constant weights satisfying kW 1 k w1m,
where w1m is a positive constant; and S 1(Z 1) are the basis
functions. By using ^
W 1 to approximate W
1 , the error between the actual and the ideal RBFNN can beexpressed as
W 1 TS 1(Z 1) W T
1 S 1(Z 1) ¼ ~ W 1 T
S 1(Z 1) (16)
where ~ W 1 ¼ W 1 W 1 .
Consider the following Lyapunov function candidate
V 1 ¼1
2d 11r 21 þ
1
2~ W 1
TG
11
~ W 1 (17)
The time derivative of (17) along (13) and (15) is given by
_V 1 ¼ d 11r 1 _r 1 þ ~ W 1 TG
11
_~ W 1
¼ r 1[b 11(_q 3)t 1 W T1 S 1(Z 1) 11(Z 1)] þ ~ W 1
TG
11
_~ W 1
(18)
As W 1 is a constant vector, we know that _~ W 1 ¼ _W 1.
Therefore (18) becomes
_V 1 ¼ r 1[b 11(_q 3)t 1 W T1 S 1(Z 1) 11(Z 1)] þ ~ W 1 TG1
1 _W 1
(19)
Consider the following RBFNN based control law andRBFNN weight adaptation law
t 1 ¼ k1r 1 r 1( W 1
TS 1(Z 1))2
b 11(jr 1 W 1 TS 1(Z 1)j þ d 1)
(20)
_W 1 ¼ G1[S 1(Z 1)r 1 þ s 1 W 1] (21)
where k1 . 0, d 1 . 0, G1 ¼ G T1 . 0, and s 1 . 0.
Remark 4: The above s -modification adaptation law (21)can be replaced by e -modification adaptation law like
_W 1 ¼ G1[S 1(Z 1)r 1 þ s 1jr 1j W 1] easily. The control designbased on s -modification adaptation law in this paper canbe extended to the case based on e -modification adaptationlaw without any difficulty.
Substituting (20) and (21) into (19), we have
_V 1 ¼ k1b 11(_q 3)r 21 b 11(_q 3)
b 11
r 21 ( W 1 TS 1(Z 1))2
jr 1 W 1 T
S 1(Z 1)j þ d 1
r 1W T1
S 1(Z 1) r 111(Z 1) r 1 ~ W 1 T
S 1(Z 1) s 1 ~ W 1
TW 1
(22)
According to Assumption 3 and (16), we can rewrite (22) as
_V 1 k1b 11r 21 r 21 ( W 1
TS 1(Z 1))2
jr 1 W 1 T
S 1(Z 1)j þ d 1
r 1 W 1 TS 1(Z 1) r 111(Z 1) s 1
~ W 1 TW 1
k1b 11r 21 r 21 ( W 1
TS 1(Z 1))2
jr 1 W 1 T
S 1(Z 1)j þ d 1
þ jr 1 W 1 TS 1(Z 1)j þ jr 1k11(Z 1)j s 1
~ W 1 T
W 1 (23)
Noting that
r 21 ( W 1
TS 1(Z 1))2
jr 1 W 1 T
S 1(Z 1)j þd 1
þ jr 1 W 1 TS 1(Z 1)j ¼
jr 1 W 1 TS 1(Z 1)jd 1
jr 1 W 1 T
S 1(Z 1)j þd 1
(24)
According to Lemma 1, we can obtain from (24) that
r 21 ( W 1
TS 1(Z 1))2
jr 1 W 1 T
S 1(Z 1)j þ d 1
þ jr 1 W 1 TS 1(Z 1)j d 1 (25)
By completion of squares and using Young’s inequality, thefollowing inequalities hold
s 1 ~ W
T
1 W 1
s 12
k ~ W 1k2
þs 12
kW 1k2 (26)
jr 1k11(Z 1)j r 212c 1
þc 11
21(Z 1)
2
r 212c 1
þc 1 12
1
2 (27)
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 945
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 6/16
where c 1 is a positive constant. Substituting the aboveinequalities (25)–(27) into (23) leads to
_V 1 k1b 11 1
2c 1
r 21
s 12
k ~ W 1k2
þ d 1 þc 12
121 þ
s 12
w21m
12
d 112k1b 11 (1=c 1)
d 11
r 21 12
s 1
lmax(G11 )
~ W 1 TG
11
~ W 1 þ d 1 þc 12
121 þ
s 12
w21m
min 2k1b 11 (1=c 1)
d 11
, s 1
lmax(G11 )
( )
1
2d 11r 21 þ
1
2~ W 1
TG
11
~ W 1
þ d 1 þ
c 12
121 þ
s 12
w21m
l10V 1 þ m10 (28)
where l10 ¼ min (2k1b 11 1=c 1)=d 11, s 1=lmax(G11 )
, m10 ¼
d 1 þc 12 1
21 þ
s 12 w2
1m.
3.1.2 q2 subsystem: Similar to Section 3.1.1, since_q 2 ¼ _q 2r þ r 2, €q 2 ¼ €q 2r þ _r 2, (10) becomes
d 22(q 3)d 33 d 223
d 33
_r 2 þ c 22(q 3, _q 3)r 2 ¼ b 22(_q 3)t 2 f S 2,1 (29)
where
f S 2,1 ¼d 22(q 3)d 33 d 223
d 33
€q 2r þ c 22(q 3, _q 3)_q 2r þ c 23(q 3, _q 2)_q 3
þ D2(q , _q ) þd 23
d 33
(b 31(_q 3)t 1 c 32(q 3, _q 2)_q 2
f 3(_q 3) g 3 D3(q , _q ))
is an unknown function, which is approximated by RBFNNto arbitrary any accuracy as
f S 2,1 ¼ W T
2 S 2(Z 2) þ 12(Z 2) (30)
where the input vector Z 2 ¼ [t 1, q 1, _q 1, q 2, _q 2, q 3,
_q 3, q 2d , _q 2d , €q 2d ] T[ VZ 2
, R 10, 12(Z 2) is theapproximation error satisfying j12(Z 2)j 12, where 12 is anunknown positive constant; W
2 are unknown ideal constant weights satisfying kW 2 k w2m, where w2m is an unknownpositive constant; and S 2(Z 2) are the basis functions. By using W 2 to approximate W 2 , the error between the actualand the ideal RBFNN can be expressed as
W T
2 S
2(Z
2) W T
2 S
2(Z
2) ¼ ~ W
T
2S
2(Z
2) (31)
where ~ W 2 ¼ W 2 W 2 .
To analyse the closed-loop stability for the q 2 subsystem,let
V 2 ¼1
2
d 22(q 3)d 33 d 223
d 33
r 22 þ1
2~ W
T
2 G12
~ W 2 (32)
Lemma 3: The function V 2 (32) is positive definite anddecrescent, in the sense that there exist two time-invariant positive definite functions V 2(r 2, ~ W 2) and V 2(r 2, ~ W 2), suchthat
V 2(r 2, ~ W 2) V 2 V 2(r 2, ~ W 2)
Proof: Noting that the particular choice of V 2 in (32), a function of r 2, ~ W 2 and d 22(q 3), is to establish the stability for r 2 and ~ W 2 only; therefore, we regard d 22(q 3) a s a function of time. From Assumptions 1 and 4, we know that
0 , jd 22jd 33j d 223j
jd 33j, j d 22(q 3)d 33 d
223
d 33
j d 22jd 33j þ d
223
jd 33j
(33)
Therefore there also exist time-invariant positive definitefunctions V 2(r 2, ~ W 2) and V 2(r 2, ~ W 2), such that V 2(r 2, ~ W 2) V 2 V 2(r 2, ~ W 2), which implies that V 2 is also positivedefinite and decrescent, according to [25]. This completesthe proof. A
The time derivative of (32) is given as
_V 2 ¼ 12 _d 22(q 3)r 22 þ d 22(q 3)d 33 d
2
23d 33
r 2 _r 2 þ ~ W T2 G12 _~ W 2
(34)
According to Assumption 2, (34) becomes
_V 2 ¼ r 2d 22(q 3)d 33 d 223
d 33
_r 2 þ c 22(q 3, _q 3)r 2
" #þ ~ W
T
2 G12
_~ W 2
(35)
As W 2 is a constant vector, it is easy to obtain that
_~ W 2 ¼ _W 2 (36)
Substituting (29), (30) and (36) into (35), we have
_V 2 ¼ r 2 b 22(_q 3)t 2 W T 2 S 2(Z 2) 12(Z 2)
þ ~ W
T
2 G12
_W 2
(37)
Consider the following RBFNN-based control law andRBFNN weight adaption law
t 2 ¼ k2r 2 þr 2( W 2
TS 2(Z 2))2
b 22(jr 2 ^
W 2 T
S 2(Z 2)j þ d 2)
(38)
_W 2 ¼ G2[S 2(Z 2)r 2 þ s 2
W 2] (39)
946 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 7/16
where k2 . 0, d 2 . 0,G2 ¼ G T2 . 0ands 2 . 0. Substituting
(38) and (39) into (37), we have
_V 2 ¼ k2b 22(_q 3)r 21 þb 22(_q 3)
b 22
r 22 ( W 2 TS 2(Z 2))2
jr 2 W 2 T
S 2(Z 2)jþd 2
r 2W T2 S 2(Z 2)
r 212(Z 2)r 2 ~ W 2 TS 2(Z 2)s 2
~ W 2 TW 2 (40)
According to Assumption 3 and (31), we can rewrite (40) as
_V 2 k2b 22r 22 r 22 ( W 2
TS 2(Z 2))2
jr 2 W 2 T
S 2(Z 2)j þd 2
r 2 W 2 TS 2(Z 2)r 212(Z 2) s 2
~ W 2 T
W 2
k2b 22r 22 r 22 ( W 2
TS 2(Z 2))2
jr 2 W 2 T
S 2(Z 2)j þd 2
þjr 2 W 2 TS 2(Z 2)j þjr 2k12(Z 2)j s 2
~ W 2 T
W 2 (41)
Similar to (25), we have
r 22 ( W 2
TS 2(Z 2))2
jr 2 W 2 T
S 2(Z 2)jþ d 2
þjr 2 W 2 TS 2(Z 2)j d 2 (42)
By completion of squares and using Young’s inequality, thefollowing inequalities hold
s 2 ~ W
T
2 W 2
s 2
2
k ~ W 2k2
þs 2
2
kW 2k2 (43)
jr 2k12(Z 2)j r 222c 2
þc 21
22(Z 2)
2
r 222c 2
þc 2 1
22
2 (44)
where c 2 is a positive constant. Substituting the aboveinequalities (42)–(44) into (41) leads to
_V 2 k2b 22 1
2c 2
r 22
s 22
k ~ W 2k2
þd 2 þc 22
122 þ
s 22
w22m
l20V 2 þm20 (45)
where l20 ¼ min{(2k2b 22 1=c 2)jd 33j=( d 22jd 33jþ d 223),s 2=
lmax(G12 )}, m20 ¼d 2 þ
c 22 1
22 þ
s 22 w2
2m.
3.1.3 q3 subsystem: Finally, using the designed controllaws (20) and (38), the q 3-subsystem (1) can be rewritten as
_h ¼ c (j , h , u ) (46)
where h ¼ [q 3, _q 3] T, j ¼ [q 1, q 2, _q 1, _q 2] T, u ¼ [t 1, t 2] T.
Then, the zero-dynamics can be addressed as [26]
_h ¼ c (0, h , u
(0, h )) (47)
where u ¼ [t 1, t 2] T.
Assumption 8 [26] : System (9) (10) (11) is hyperbolically minimum-phase, i.e. zero-dynamics (47) is exponentially stable. In addition, assume that the control input u isdesigned as a function of the states (j , h ) and the referencesignal satisfying Assumption 5, and the function f (j , h , u )is Lipschitz in j , i.e. there exist constants Lj and L f for
f (j , h , u ) such that
k f (j , h , u ) f (0, h , u h )k Lj kj k þ L f (48)
where u h ¼ u (0, h ).
Under Assumption 8, by the Converse Theorem of Lyapunov [27], there exists a Lyapunov function V 0(h ) whichsatisfies
g a kh k2
V 0(h ) g b kh k2 (49)
@V 0@h
f (0, h , u h ) la kh k2 (50)
k@V 0@h
k lb kh k (51)
where g a , g b , la and lb are positive constants.
Lemma 4 [26] : For the internal dynamics _h ¼ f (j , h , u )of the system, if Assumption 8 is satisfied, and the states j are bounded by a positive constant kj kmax, i.e.kj k kj kmax, then there exist positive constants Lh andT 0, such that
kh (t )k Lh , 8t > T 0 (52)
Proof: According to Assumption 8, there exists a Lyapunov function V 0(h ). Differentiating V 0(h ) along (9), (10), and(11) yields
_V 0(h ) ¼@V 0@h
f (j , h , u )
¼@V 0@h
f (0, h , u h ) þ@V 0@h
[ f (j , h , u ) f (0, h , u h )]
(53)
Noting (48)–(51), (53) can be written as
_V 0(h ) la kh k2
þ lb kh k(Lj kj k þ L f )
la kh k2
þ lb kh k(Lj kj kmax þ L f )
Therefore _V 0(h ) 0, whenever
kh k lb
la
(Lj kj kmax þ L f )
By letting Lh ¼ lb =r la (Lj kj kmax þ L f ), we conclude that there exists a positive constant T 0, such that (52) holds. A
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 947
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 8/16
The following theorem shows the stability and controlperformance of the closed-loop system.
Theorem 1: Consider the closed-loop system consisting of the subsystems (9)–(11), the control laws (20), (38) and
adaptation laws (21), (39). Under Assumptions 1–8, theoverall closed-loop neural control system is SGUUB in thesense that all of the signals in the closed-loop system arebounded, and the tracking errors and neural weightsconverge to the following regions
je 1j je 1(0)j þ1
l1
ffiffiffiffiffiffiffiffi2m1
d 11
s , k W 1k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m1
lmin(G11 )
s þ w1m
je 2j je 2(0)j þ1
l2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2jd 33jm2
jd 22jd 33j d 223j
s ,
k W 2k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m2
lmin(G12 )
s þ w2m
(54)
with
mi ¼mi 0
li 0
þ V i (0), mi 0 ¼ d i þ1
2 1
2i þ
s i 2
w2im, i ¼ 1, 2
l10 ¼ min{(2k1b 11 1=c 1)=d 11, s 1=lmax(G11 )}
l20 ¼ min{(2k2 1=c 2)jd 33j=( d 22jd 33j þ d 223), s 2=lmax(G12 )}
where e i (0) and V i (0) are initial values of e i (t ) and V i (t ),respectively.
Proof: Based on the previous analysis, the proof also proceedsby studying each subsystem in order. First, the closed-loopstability analysis of q 1 subsystem (9) with control t 1 (20) andadaptation law (21) is made by using Lyapunov synthesis.Second, similar closed-loop stability will be achieved on q 2subsystem (10) with t 2 (38) and adaptation law (39).Finally, the stability analysis of internal dynamics of q 3subsystem (11) is made based on the stability of the previoustwo subsystems.
q 1-subsystem: Solving the inequality (109), we have0 V 1(t ) m1 with m1 ¼ (m10=l10) þ V 1(0). Then, fromthe definition of V 1(t ) (17), we can obtain
jr 1j
ffiffiffiffiffiffiffiffi2m1
d 11
s , k ~ W 1k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m1
lmin(G11 )
s (55)
Since _e 1 ¼ l1e 1 þ r 1, solving this equation results in
e 1 ¼ el1t e 1(0) þ
ð t
0el1(t t )r 1 dt (56)
According to (55) and (56), we have
je 1j je 1(0)j þ1
l1
ffiffiffiffiffiffiffiffi2m1
d 11
s (57)
Noting q 1 ¼ e 1 þ q 1d , W 1 ¼ ~ W 1 þ W 1 , kW 1 k w1m and Assumption 5, we obtain
jq 1j je 1j þ jq 1d j je 1(0)j þ1
l1
ffiffiffiffiffiffiffiffi2m1
d 11
s þ jq 1d j [ L
1
k W 1k k ~ W 1k þ kW 1 k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m1
lmin(G11 )
s þ w1m [ L
1
Since the control t 1 is a function of r 1 and W 1, its
boundedness is also guaranteed.
q 2-subsystem: Similar to the analysis of q 1 subsystem, we have
jr 2j
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2jd 33jm2
d 22jd 33j d 223
s
, k ~ W 2k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m2
lmin(G12 )
s (58)
Furthermore, we obtain
je 2j je 2(0)j þ1
l2 ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2jd 33jm2
jd 22jd 33j d 223j
s jq 2j je 2j þ jq 2d j je 2(0)j
þ1
l2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2jd 33jm2
jd 22jd 33j d 223j
s þ jq 2d j [ L
1
k W 2k k ~ W 2k þ kW 2 k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m2
lmin(G12 )
s þ w2m [ L
1 (59)
and thus the boundedness of control t 2.
q 3-subsystem: From the previous stability analysis about the q 1subsystem and the q 2 subsystem, we know that q 1, q 2, _q 1, _q 2are bounded. Accordingly, j are bounded. According toLemma 5, we know that the internal dynamics is stable,i.e. h (q 3 and _q 3) are bounded. All the signals in the closed-loop system are bounded. This completes the proof. A
3.2 MNN-based control
Nonlinearly parameterised approximators, such as MNN, canbe linearised by Taylor series expansions,with the higher order terms being taken as part of the modelling error. Due to the
nonlinear parameterisation, the control design and stability analysis involving MNN are more complex than that basedon the linearly parameterised network RBFNN.
948 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 9/16
3.2.1 q1 subsystem: Similar to the RBFNN case inSection 3.1.1, (9) is written as
d 11 _r 1 ¼ b 11(_q 3)t 1 f S 1,1 (60)
where the unknown continuous function
f S 1,1 ¼ d 11 €q 1r þ f 1(_q 3) þ g 1 þ D1(q , _q ) (61)
is approximated by MNN to arbitrary any accuracy as
f S 1,1 ¼ W T1 S 1(V T
1 Z 1) þ 11(Z 1) (62)
where the input vector Z 1 ¼ [q 1, _q 1, q 2, _q 2, q 3, _q 3, _q 1d ,€q 1d , 1] T [ VZ 1
, R 9; 11(Z 1) is the approximation error satisfying j11(Z 1)j 11, where 11 is a positive constant;W 1 and V 1 are unknown ideal constant weights satisfying
kW
1 k w1m, kV
1 kF v 1m, which are positive constants.By using W T1 S 1( V T1 Z 1) to approximate W T
1 S 1(V T1 Z 1), the
error between the actual and the ideal MNN can beexpressed as
W T1 S ( V T1 Z 1) W T1 S (V T
1 Z 1)
¼ ~ W T1 (S 1 S 01 V T1 Z 1) þ W T1 S 01 ~ V
T1 Z 1 þ d u 1 (63)
where S 1 ¼ S ( V T1 Z 1), S 01 ¼ diag {s 01, s 02, . . . , s 0l } with
^s
0
i ¼ s 0
(^v
T
i Z ) ¼
d[s (za )]
dza jza ¼v Ti Z
the residual term d u 1 is bounded by
jd u 1j kV 1 kF kZ 1 W T1 S 01kF þ kW 1 kkS 01 V T1 Z 1k þ jW 1 j1
(64)
and the weight estimation errors ~ W 1 ¼ W 1 W 1 , ~ V 1 ¼
V 1 V 1 .
Consider the following Lyapunov function candidate
V 1(r 1, ~ W 1, ~ V 1) ¼1
2d 11r 21 þ
1
2~ W 1
TG
1W 1
~ W 1 þ1
2tr{ ~ V 1
TG
1V 1
~ V 1}
(65)
The time derivative of (65) along (60) and (62) is given by
_V 1 ¼ r 1 b 11(_q 3)t 1 W T1 S 1(V T
1 Z 1) 11(Z 1)h i
þ ~ W 1 TG
1W 1
_~ W 1 þ tr{ ~ V 1 TG
1V 1
_~ V 1} (66)
As W 1 , V 1 are constant vectors, it is easy to obtain that
_~ W 1 ¼ _W 1, _~ V 1 ¼
_V 1 (67)
Substituting (67) into (66), we have
_V 1 ¼ r 1 b 11(_q 3)t 1 W T1 S 1(V T
1 Z 1) 11(Z 1)h i
þ ~ W 1 TG
1W 1
_W 1 þ tr{ ~ V 1
TG
1V 1
_V 1} (68)
Consider the following MNN-based control law and MNN weight adaption laws
t 1 ¼ k1r 1 r 1( W T1 S ( V T1 Z 1))2
b 11(jr 1 W T1 S ( V T1 Z 1)j þ d 1)
k1r 1b 11
(kZ 1 W T1 S 01k2F þ kS 01 V T1 Z 1k
2) (69)
_W 1 ¼ GW 1[(S 1 S 01 V T1 Z 1)r 1 þ s W 1
W 1] (70)
_V 1 ¼ GV 1[Z 1 W T1 S 01r 1 þ s V 1
V 1] (71)
where k1 . 0, d 1 . 0, GW 1 ¼ G TW 1 . 0, GV 1 ¼ G
TV 1 . 0,
s W 1 . 0, s V 1 . 0.
Substituting (69)–(71) in (68), we have
_V 1 ¼ k1b 11(_q 3)r 21 b 11(_q 3)
b 11
r 21 W T1 S ( V T1 Z 1) 2
jr 1 W T1 S ( V T1 Z 1)j þ d 1
b 11(_q 3)
b 11
k1r 21 kZ 1 W T1 S 01k2F þ kS 01 V T1 Z 1k
2
r 1W T1 S 1(V T1 Z 1) r 111(Z 1) r 1 ~ W T
1 (S 1 S 01 V T1 Z 1)
s W 1 ~ W
T
1 W 1 tr{ ~ V 1
TZ 1 W T1 S 01r 1} s V 1tr{ ~ V 1
TV 1}
(72)
Noting Assumption 3 and the fact that tr{ ~ V 1 T
Z 1 W T1 S 01r 1} ¼
r 1 W T1 S 01 ~ V 1 T
Z 1, (72) becomes
_V 1 k1b 11r 21 r 21 W T1 S ( V T1 Z 1) 2
jr 1 W T1 S ( V T1 Z 1)j þ d 1
k1r 21 kZ 1 W T1 S 01k2F þ kS 01 V T1 Z 1k2
þ jr 1jj11(Z 1)j
r 1W T1 S 1(V T
1 Z 1) r 1 ~ W T
1 (S 1 S 01 V T1 Z 1)
r 1 W T1 S 01 ~ V 1 T
Z 1 s W 1 ~ W
T
1 W 1 s V 1tr{ ~ V 1
TV 1} (73)
From (63) and (64), we know
r 1W T1 S 1(V T
1 Z 1) r 1 ~ W T
1 (S 1 S 01 V T1 Z 1) r 1 W T1 S 01 ~ V 1 T
Z 1
¼ r 1 W T1 S ( V T1 Z 1) r 1d u 1
jr 1 ^W
T
1 S ( ^V
T
1 Z 1)j þ jr 1jkV
1 kF kZ 1 ^W
T
1 ^S
0
1kF
þ jr 1jkW 1 kkS 01 V T1 Z 1k þ jr 1jjW 1 j1 (74)
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 949
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 10/16
Substituting (74) into (73) leads to
_V 1 k1b 11r 21 r 21 W T1 S ( V T1 Z 1) 2
jr 1 W T1 S ( V T1 Z 1)j þd 1 þ jr 1 W T1 S ( V T1 Z 1)j
k1r 21 kZ 1 W T1 S 01k2F þ kS 01 V T1 Z 1k
2
þ jr 1jj11(Z 1)j
þ jr 1jkV 1 kF kZ 1 W T1 S 01kF þ jr 1jkW 1 kkS 01 V T1 Z 1k
þ jr 1jjW 1 j1 s W 1 ~ W
T
1 W 1 s V 1tr{ ~ V 1
TV 1} (75)
According to Lemma 1,
r 21 W T1 S ( V T1 Z 1) 2
jr 1 W T1 S ( V T1 Z 1)j þd 1þ jr 1 W T1 S ( V T1 Z 1)j
¼jr 1 W T1 S ( V T1 Z 1)jd 1
jr 1 W T1 S ( V T1 Z 1)j þd 1 d 1 (76)
By completion of squares and using Young’s inequality, thefollowing inequalities hold
jr 1jj11(Z 1)j r 21
2c 11
þc 11 1
21
2 (77)
jr 1jkV 1 kF kZ 1 W T1 S 01kF k1r 21 kZ 1 W T1 S 01k2F þ
1
4k1
kV 1 k2F
(78)
jr 1jkW 1 kkS 01 V T1 Z 1k k1r 21 kS 01 V T1 Z 1k2
þ1
4k1
kW 1 k2 (79)
jr 1jjW 1 j1 r 21
2c 12
þc 12jW 1 j
21
2 (80)
s W 1 ~ W
T
1 W 1
s W 1
2 k ~ W 1k
2þs W 1
2 kW 1k
2 (81)
s V 1tr{ ~ V 1 T
V 1} s V 1
2 k ~ V 1k
2F þ
s V 1
2 kV 1 k
2F (82)
Substituting (76)–(82) into (85), we have
_V 1 k1b 11 1
2c 11
1
2c 12
r 21
s W 1
2 k ~ W 1k
2
s V 1
2 k ~ V 1k
2F þd 1 þ
s W 1
2 þ
1
4k1
kW 1 k
2
þs V 1
2 þ
1
4k1
kV 1 k
2F þ
c 11
2 1
21 þ
c 12jW 1 j21
2
l10V 1 þm10 (83)
where l10¼
min{(2k1b 11
1=c 11
1=c 12)=d 11, s W 1=lmax(G1
W 1),s V 1=lmax(G1V 1)},m10 ¼ d 1 þ(s W 1=2 þ 1=4k1)kW 1 k
2þ
(s V 1=2 þ 1=4k1)kV 1 k2F þ (c 11=2)1
21 þ (c 12jW 1 j
21=2).
3.2.2 q2 subsystem: Similar to Section 3.1.2, (10)becomes
d 22(q 3)d 33 d 223
d 33
_r 2 þ c 22(q 3, _q 3)r 2 ¼ b 22(_q 3)t 2 f S 2,1 (84)
where the unknown function
f S 2,1 ¼d 22(q 3)d 33 d 223
d 33
€q 2r þ c 22(q 3, _q 3)_q 2r
þ c 23(q 3, _q 2)_q 3 þ D2(q , _q ) þd 23
d 33
(b 31(_q 3)t 1
c 32(q 3, _q 2)_q 2 f 3(_q 3) g 3 D3(q , _q ))
is approximated by MNN to arbitrary any accuracy as
f S
2,1 ¼ W T2 S 2(V T
2 Z 2) þ 12(Z 2)
where the input vector Z 2 ¼ [t 1, q 1, _q 1, q 2, _q 2, q 3, _q 3,q 2d , _q 2d , €q 2d , 1] T [ VZ 2
, R 11, 12(Z 2) is the approximationerror satisfying j12(Z 2)j 12, where 12 is a positive constant;W 2 and V 2 are ideal constant weights satisfying kW 2 k
w2m, kV 2 kF v 2m, which are positive constants. By using
W T2 S 2( V T2 Z 2) to approximate W T2 S 2(V T
2 Z 2), the error between the actual and the ideal MNN can be expressed as
W T2 S ( V T2 Z 2) W T2 S (V T
2 Z 2)
¼ ~ W T
2 (S 2 S 02 V T2 Z 2) þ W T2 S 02 ~ V T
2 Z 2 þ d u 2 (85)
where S 2 ¼ S ( V T2 Z 2), S 02 ¼ diag {s 01, s 02, . . . , s 0l } with
s 0i ¼ s 0(v Ti Z 2) ¼d [s (za )]
dza
jza ¼v Ti Z 2
the residual term d u 2 is bounded by
jd u 2j kV 2 kF kZ 2 W T2 S 02kF þ kW 2 kkS 02 V T2 Z 2k þ jW 2 j1
(86)
and the weight estimation errors ~ W 2 ¼ W 2 W 2 , ~ V 2 ¼
V 2 V 2 .
To analyse the closed-loop stability for the q 2-subsystem,consider the following Lyapunov function candidate
V 2(r 2, ~ W 2, ~ V 2) ¼1
2
d 22(q 3)d 33 d 223
d 33
r 22
þ1
2~ W
T
2 G1W 2
~ W 2 þ1
2tr{ ~ V
T
2 G1V 2
~ V 2} (87)
Lemma 5: The function V 2 (87) is positive definite anddecrescent, in the sense that there exist two time-invariant positive definite functions V 2(r 2, ~ W 2, ~ V 2) and V 2(r 2,
~ W 2, ~ V
2), such that
V 2(r 2, ~ W 2, ~ V 2) V 2 V 2(r 2, ~ W 2, ~ V 2)
950 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 11/16
Proof: The proof can be referred to that of Lemma 3 andomitted here for conciseness. A
The time derivative of (87) is given as
_V 2 ¼
1
2_d 22(q 3)r
22 þ
d 22(q 3)d 33 d 223
d 33r 2 _r 2
þ ~ W T2 G
12
_~ W 2 þ tr{ ~ V T2 G
1V 2
_~ V 2} (88)
According to Assumption 2, (88) becomes
_V 2 ¼ r 2d 22(q 3)d 33 d 223
d 33
_r 2 þ c 22(q 3, _q 3)r 2
" #
þ ~ W T
2G12
_~ W 2 þ tr{ ~ V T
2 G1V 2
_~ V 2} (89)
As W 2 , V 2 are constant vectors, it is easy to obtain that
_~ W 2 ¼ _W 2, _~ V 2 ¼
_V 2 (90)
Substituting (84), (85) and (90) into (94), we have
_V 2 ¼ r 2 b 22(_q 3)t 2 W T2 S 2(V T
2 Z 2) 12(Z 2)h i
þ ~ W T
2 G1W 2
_W 2 þ tr{ ~ V
T
2 G1V 2
_V 2} (91)
Consider the following MNN-based control law and MNN weight adaption laws
t 2 ¼ k2r 2 þr 2 W T2 S ( V T2 Z 2) 2
b 22 jr 2 W T2 S ( V T2 Z 2)j þ d 2
þk2r 2b 22
(kZ 2 W T2 S 02k2F þ kS 02 V T2 Z 2k
2) (92)
_W 2 ¼ GW 2[(S 2 S 02 V T2 Z 2)r 2 þ s W 2
W 2] (93)
_V 2 ¼ GV 2[Z 2 W T2 S 02r 2 þ s V 2
V 2] (94)
where k2 . 0, d 2 . 0, GW 2 ¼ G TW 2 . 0, GV 2 ¼ G
TV 2 . 0,
s W 2 . 0, s V 2 . 0.
Substituting (92)–(94) into (91), we have
_V 2 ¼ k2b 22(_q 3)r 22 þb 22(_q 3)
b 22
r 22 W T2 S ( V T2 Z 2) 2
jr 2 W T2 S ( V T2 Z 2)j þ d 2
þb 22(_q 3)
b 22
k2r 22 kZ 2 W T2 S 02k2F þ kS 02 V T2 Z 2k
2
r 2W T2 S 2(V T
2 Z 2) r 212(Z 2) r 2 ~ W T
2 (S 2 S 02 V T2 Z 2)
s W 2 ~ W T2 W 2 tr{ ~ V 2 TZ 2 W T2 S 02r 2} s V 2tr{ ~ V 2 TV 2}
(95)
Noting Assumption 3 and the fact that tr { ~ V 2 T
Z 2 W T2 S 02r 2} ¼
r 2 W T2 S 02 ~ V 2 T
Z 2, (95) becomes
_V 2 k2b 22r 21 r 22 W T2 S ( V T2 Z 2) 2
jr 2 ^
W T2 S (
^
V T2 Z 2)j þ d 2
k2r 22 kZ 2 W T2 S 02k
2F þ kS 02 V T2 Z 2k
2
þ jr 2jj12(Z 2)j
r 2W T2 S 2(V T
2 Z 2) r 2 ~ W T
2 (S 2 S 02 V T2 Z 2)
r 2 W T2 S 02 ~ V 2 T
Z 2 s W 2 ~ W
T
2 W 2 s V 2tr{ ~ V 2
TV 2} (96)
From (85) and (86), we know
r 2W T2 S 2(V T
2 Z 2) r 2 ~ W T
2 (S 2 S 02 V T2 Z 2) r 2 W T2 S 02 ~ V 2 T
Z 2
¼ r 2 W T2 S ( V T2 Z 2) r 2d u 2
jr 2 W T2 S ( V T2 Z 2)j þ jr 2jkV 2 kF kZ 2 W T2 S 02kF
þ jr 2jkW 2 kkS 02 V T2 Z 2k þ jr 2jjW 2 j1 (97)
Substituting (97) to (96) leads to
_V 2 k2b 22r 22 r 22 W T2 S ( V T2 Z 2) 2
jr 2 W T2 S ( V T2 Z 2)j þd 2
þ jr 2 W T2 S ( V T2 Z 2)j
k2r 22 kZ 2
^W
T2
^S
0
2k2F þ k
^S
0
2 ^V
T2 Z 2k
2 þ jr 2jj12(Z 2)j þ jr 2jkV 2 kF kZ 2 W T2 S 02kF
þ jr 2jkW 2 kkS 02 V T2 Z 2k þ jr 2jjW 2 j1
s W 2 ~ W
T
2 W 2 s V 2tr{ ~ V 2
TV 2} (98)
According to Lemma 1
r 22 W T2 S ( V T2 Z 2) 2
jr 2 ^W
T2 S (
^V
T2 Z 2)j þd 2
þ jr 2 W T2 S ( V T2 Z 2)j
¼jr 2 W T2 S ( V T2 Z 2)jd 2
jr 2 W T2 S ( V T2 Z 2)j þd 2 d 2 (99)
By completion of squares and using Young’s inequality, thefollowing inequalities hold
jr 2jj12(Z 2)j r 22
2c 21
þc 21 1
22
2 (100)
jr 2jkV 2 kF
kZ 2 W T2 S 02kF
k2r 22 kZ 2 W T2 S 02k2
F
þ1
4k2
kV 2 k2
F
(101)
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 951
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 12/16
jr 2jkW 2 kkS 02 V T2 Z 2k k2r 22 kS 02 V T2 Z 2k2
þ1
4k2
kW 2 k2
(102)
jr 2jjW 2 j1 r 22
2c 22
þc 22jW 2 j
21
2
(103)
s W 2 ~ W
T
2 W 2
s W 2
2 k ~ W 2k
2þs W 2
2 kW 1k
2 (104)
s V 2tr{ ~ V 2 T
V 2} s V 2
2 k ~ V 2k
2F þ
s V 2
2 kV 2 k
2F (105)
Substituting (99)–(105) into (98), we have
_V 2 k2b 22 1
2c 21
1
2c 22
r 22
s W 2
2 k ~ W 2k
2
s V 2
2
k ~ V 2k2F þd 2 þ
s W 2
2
þ1
4k2 kW 2 k
2
þs V 2
2 þ
1
4k2
kV 2 k
2F þ
c 21
2 1
22 þ
c 22jW 2 j21
2
l20V 2 þm20 (106)
where l20 ¼ min{(2k2b 22 1=c 21 1=c 22)jd 33j=( d 22jd 33jþ
d 223), s W 2=lmax(G1W 2),s V 2=lmax(G1
V 2)}, m20 ¼ d 2 þ (s W 2=
2 þ 1=4k2)kW 2 k2
þ(s V 2=2 þ 1=4k21)kV 2 k2F þ(c 21=2)1
22 þ c 22
jW 2 j21=2.
3.2.3 q3 subsystem: Finally, for the system (9)– (11)under control laws (69), (92), we can obtain the similar internal dynamics to Section 3.1.3.
The main result in this section is summarised in thefollowing Theorem.
Theorem 2: Consider the closed-loop system consisting of the subsystems (9)–(11), the control laws (69), (92), andadaptation laws (70), (71), (93) and (94). Under
Assumptions 1– 8, the overall closed-loop neural controlsystem is SGUUB in the sense that all of the signals in the
closed-loop system are bounded, and the tracking errorsand weights converge to the following regions
je 1j je 1(0)j þ1
l1
ffiffiffiffiffiffiffiffi2m1
d 11
s , k W 1k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m1
lmin(G11 )
s þ w1m
kV 1kF
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m1
lmin(G11 )
s þ v 1m
je 2j je 2(0)j þ1
l2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2jd 33jm2
jd 22jd 33j d 223j
s
k W 2k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m2
lmin(G12 )
s þ w2m, kV 2k
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m2
lmin(G12 )
s þ v 2m
with
mi ¼mi 0
li 0
þ V i (0)
mi 0 ¼ d i þs Wi
2
þ1
4ki kW i k
2þ
s Vi
2
þ1
4ki 1 kV i k
2F
þc i 12
12i þ
c i 2jW i j21
2 , i ¼ 1, 2
l10 ¼ min{(2k1b 11 1=c 11 1=c 12)=d 11
s W 1=lmax(G1W 1), s V 1=lmax(G1
V 1)}
l20 ¼ min{(2k2b 22 1=c 21 1=c 22)jd 33j=( d 22jd 33j þ d 223)
s W 2=lmax(G1W 2), s V 2=lmax(G1
V 2)}
where e i (0) and V i (0) are initial values of e i (t ) and V i (t ),respectively.
Proof: The proof of Theorem 2 follows the same approach as Theorem 1, and is omitted here for conciseness. A
4 Simulation study
To illustrate the proposed adaptive neural control, we consider the VARIO helicopter mounted on a platform [6], with thedynamic model as (2) and the following parameters d 11 ¼ 7:5,d 22(q 3) ¼ 0:4305þ0:0003cos2(4:143q 3), d 23 ¼ 0:108, d 33 ¼
0:4993, c 22(q 3, _q 3) ¼ 0:0006214 sin(8:286q 3)_q 3, c 23(q 3,_q 2) ¼
c 32(q 3,_q 2) ¼ 0:0006214 sin (8:286q 3)_q 2, f 1(_q 3) ¼ 0:6004_q 3,
f 3(_q 3) ¼ 0:0001206_q 23, g 1 ¼ 77:259, g 3 ¼ 2:642, b 11(_q 3) ¼
3:411_q 23, b 22(_q 3) ¼ 0:1525 _q 23, b 31(_q 3) ¼ 12:01_q 3 þ 105, andall quantities are expressed in SI units. The control objective is totrack the uniformly bounded desired trajectories given in [6] asfollows
q 1d ¼
0:2 0 t 50s
0:3[e(t 50)2=350
1] 0:2 50 , t 130s
0:1cos[(t 130)=10] 0:6 130 , t 20p þ 130
0:5 t 20p þ 130
8>>><>>>:
q 2d ¼
0 t , 50s
1 e(t 50)2=350 50 t , 120s
e(t 120)2=350 120 t , 180
1 þ e(t 180)2=350 t 180
8>>><>>>:
4.1 Internal dynamics stability analysis
In this section, we analyse the stability of the internaldynamics. For conciseness, we consider the RBFNN-basedcontrol case only, which can be easily extended to MNN-based control case without any difficulties. For the
RBFNN based control case, we substitute (15), (20), (30)and (38) into the q 3-subsystem (11). According to the
definition of the zero-dynamics [26], we set r 1, r 2, ~ W T
1 ,
952 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 13/16
~ W T
2 , 11(Z 1) and 12(Z 2) to zero, and that the desiredtrajectories and initial data can be chosen in such a way that terms including _q 22, €q 1d , €q 2d can be neglected [6], wehave
€q 3 ¼ 1d 33
b 31(_q 3)b 11(_q 3)
( f 1(_q 3) þ g 1) f 3(_q 3) g 3
(107)
Noticing that the zero-dynamics in (107) is nonlinear, it isdifficult to conduct the stability analysis of the nonlinear zero-dynamics directly in this example. Instead, we show its local stability within an interested operating region after linearising the nonlinear zero-dynamics around anequilibrium operating point of interest. Although thestability of the linearised system cannot exactly guaranteethe stability of the nonlinear zero-dynamics, the localstability is at least ensured within the operating region of
interest. To realise this, we need to solve for theequilibrium points first.
Substituting the term values given in the beginning of Section 4 into (107) and analysing the values of the mainrotor angular velocity from which the main rotor angular acceleration is zero, we have
4:1137 104_q 43 þ 1:8011_q 23 60968_q 3 7725900 ¼ 0
(108)
Its solutions are _q 3 ¼ 124:63, 219:5+ 468:16i and563.64 rad/s. Only the first value _q 3 ¼ 124:63 has a physical meaning for the system (see Fig. 1 for the rotationsense of the main rotor). If we linearise equation (107)around the equilibrium point _q 3 ¼ 124:63, we can obtainan eigenvalue 22.44. Therefore according to [27], all initial
values of _q 3 sufficiently near the equilibrium point _q 3 ¼ 124:63 can converge to 2124.63, indicating that thezero-dynamics of the helicopter system in (2) has a locally stable behaviour around the equilibrium point. Thelimitation of this analysis is that if the initial conditions arefar from the operating region of interest, the stability of the
zero-dynamics is not guaranteed.
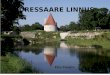
The simulation result in Fig. 2 also shows that the zero-dynamics using RBFNN-based control are locally stablearound the equilibrium point _q 3 ¼ 124:63. From Fig. 2,
we can observe that the main rotor angular velocity _q 3converges to the nominal value 2124.63 rad/s for different initial conditions ranging from 240 to 2150 rad/s, whichincludes the typical operating values more than sufficiently.
These results are expected from the previous stability analysis, and also consistent with the results in [6]. Inparticular, we also notice that the further the initial
condition starts from the nominal value2
124.63 rad/s, thelonger the settling time takes, and the more seriously thetransient oscillations become.
4.2 Performance comparison resultsbetween approximation-based control and model-based control
In this subsection, we will compare the altitude and yaw angle tracking performance using RBFNN-based control,
MNN-based control and model-based control adoptedin [6]. If all the parameters and functions in (2) areknown exactly, and the unmodelled uncertaintiesD() ¼ 0, the perfect tracking performance can beachieved using model-based control, which has beenshown in the work [6]. However, in the practice, therealways exist some model uncertainties, which may becaused by unmodelled dynamics or aerodynamicaldisturbances from the environment. To this end, weassume D()= 0, in particular, D() ¼ [2:0, 0,0:0001206_q 23 þ 0:142] T.
The control parameters for the RBFNN control laws (20)(38) and adaptation laws (21) (39) are chosen as follows:k1 ¼ 0:000085, L1 ¼ 0:2, k2 ¼ 0:0002, L2 ¼ 1:0,G1 ¼ 0:001 I , G2 ¼ 0:0001 I , s 1 ¼ 0:001, s 2 ¼ 0:001.NNs W T1 S 1(Z 1) contain 38 nodes (i.e. l 1 ¼ 2187),
with centres ml (l ¼ 1, . . . , l 1) evenly spaced in[1:0, 1:0] [0:1, 0:1] [10:0, 10:0] [40000:0,0:0][1:0, 1:0] [150:0,40:0] [0:1, 0:1][0:01,0:01], and widths h l ¼ 1:0(l ¼ 1, . . . , l 1). NNs W T2 S 2(Z 2)
contain 310 nodes (i.e. l 2 ¼ 59049), with centres ml (l ¼
1, . . . , l 2) evenly spaced in [0:005, 0:005] [1:0, 1:0]
[0:1, 0:1] [10:0, 10:0] [ 40000:0, 0:0] [1:0,
1:0] [150:0, 40:0] [10:0, 10:0] [ 1:0, 1:0][0:01, 0:01], and widths h l ¼ 1:0(l ¼ 1, . . . , l 2). Theinitial conditions are q 1(0) ¼ 0:1 m, _q 1(0) ¼ 0:0 m/s,q 2(0) ¼ p rad, _q 2(0) ¼ 0:0 rad/s, q 3(0) ¼ p rad, _q 3(0) ¼
120:0 rad/s, t 1 ¼ 0:0 m, t 2 ¼ 0:0 m, W 1(0) ¼ 0:0,W 2(0) ¼ 0:0.
Figure 2 Local stability of the zero-dynamics around theequilibrium point q
3
¼ 2124.63 using RBFNN-based
control
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 953
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 14/16
For the MNN control laws (69) and (92) and adaptationlaws (70), (71), (93) and (94), the design parameters arechosen as k1 ¼ 0:00016, L1 ¼ 1:2, k2 ¼ 0:0002, L2 ¼ 1:0,GW 1 ¼ 0:0002 I , GV 1 ¼ 0:03 I , d W 1 ¼ 0:0, s V 1 ¼ 0:0,GW 2 ¼ 0:0001 I , GV 2 ¼ 0:01 I , s W 2 ¼ 0:0, s V 2 ¼ 0:0.NNs W T1 S 1( V T1 z1) contain five nodes and NNs
W T2 S 2( V T2 z2) contains 15 nodes. The initial conditions areq 1(0) ¼ 0:1 m, _q 1(0) ¼ 0 m/s, q 2(0) ¼ p rad, _q 2(0) ¼
0:0 rad/s, q 3(0) ¼ p rad, _q 3(0) ¼ 120:0 rad/s, t 1 ¼
0:0 m, t 2 ¼ 0:0 m, W 1(0) ¼ 0:0, V 1(0) ¼ 0:0, W 2(0) ¼ 0:0,V 2(0) ¼ 0:0.
From Figs. 3 and 4, we can observe that due to theexistence of model uncertainties, both the altitudetracking and yaw angle tracking using model-basedcontrol have some offsets to the desired trajectories for the whole period. It means that model-based controldepends on the accuracy of model heavily and cannot deal with the uncertainties well. For the tracking performance using the RBFNN-based control andMNN-based control, although there are also someoscillations at the beginning period, the tracking errorscan converge to a very small neighbourhood of desired
Figure 3 Altitude tracking performance in the presence of
model uncertainties using three methods: RBFNN-based
control, MNN-based control and model-based control,
respectively a Zoom-outb Zoom-in
Figure 5 Control inputs for altitude and yaw angle tracking
in the presence of model uncertainties using three methods:
RBFNN-based control, MNN-based control and model-
based control, respectively
Figure 4 Yaw angle tracking performance in the presence
of model uncertainties using three methods: RBFNN-based
control, MNN-based control and model-based control,
respectively a Zoom-outb Zoom-in
Figure 6 Norm of neural weights using RBFNN-based
control and MNN-based control
954 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& The Institution of Engineering and Technology 2009 doi: 10.1049/iet-cta.2008.0103
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 15/16
trajectories in a short time about 20 s. This is because themodel uncertainties can be learnt by RBFNN and MNNduring the beginning 20 s. After that period, theuncertainties can be compensated for, and thus, therobustness to uncertainties is improved and the goodtracking performance is achieved. In addition, Figs. 5
and 6 indicate the boundedness of the control actionsand neural weights for all control methods.
5 Conclusion
In this paper, NN approximation-based control has beeninvestigated for the helicopter altitude and yaw angletracking in the presence of model uncertainties. Compared
with the model-based control, which is sensitive to theaccuracy of the model representation, NN approximationbased control is tolerant of model uncertainties, and can be
viewed as a key advantage over model-based control of helicopters, for which accurate modelling of helicopter dynamics is difficult, time-consuming and costly.Simulation results demonstrated that the helicopter is ableto track altitude and yaw angle reference signalssatisfactorily, with all other closed-loop signals bounded.
6 References
[1] SIRA-RAMIREZ H., ZRIBI M., AHMAD S.: ‘Dynamical sliding mode
control approach for vertical flight regulation in helicopters’,
IEE Proc. Control Theory Appl., 1994, 141, pp. 19– 24
[2] DEVASIA S.: ‘Output tracking with nonhyperbolic and near
nonhyperbolic internal dynamics: helicopter hover control’,
J. Guidance Control Dyn., 1997, 20, (3), pp. 573–580
[3] KOO T.J., SASTRY S.: ‘Output tracking control design of a
helicopter model based on approximate linearization’.
Proc. IEEE Conf. Decision and Control, Tampa, Florida, 1998
[4] CIVITA M.L., PAPAGEORGIOU G., MESSNER W., KANADE T.: ‘Design
and flight testing of a high-bandwidth H-1 loop shapingcontroller for a robotic helicopter’. Proc. AIAA Guidance,
Navigation, and Control Conf. and Exhibit, August 2002
[5] ISIDORI A., MARCONI L., SERRANI A.: ‘Robust nonlinear motion
control of a helicopter’, IEEE Trans. Autom. Control , 2003,
48, (3), pp. 413–426
[6] VILCHIS J.A., BROGLIATO B., DZUL A., LOZANO R.: ‘Nonlinear
modelling and control of helicopters’, Automatica, 2003,
39, pp. 1583–1596
[7] NARENDRA K.S., PARTHASARATHY K.: ‘Identification and controlof dynamic systems using neural networks’, IEEE Trans.
Neural Netw., 1990, 1, (1), pp. 4–27
[8] LEVIN A.U., NARENDRA K.S.: ‘Control of nonlinear dynamical
systems using neural networks – part ii: observability,
identification, and control’, IEEE Trans. Neural Netw.,
1996, 7, (1), pp. 30–42
[9] LEWIS F.L., JAGANNATHAN S., YESILIDREK A.: ‘Neural network
control of robot manipulators and nonlinear systems’(Taylor and Francis, Philadelphia, PA, 1999)
[10] GE S.S., LEE T.H., HARRIS C.J.: ‘Adaptive neural networkcontrol
of robotic manipulators’ (World Scientific, London, 1998)
[11] GE S.S., HANG C.C., LEE T.H., ZHANG T.: ‘Stable adaptive neural
network control’ (Kluwer Academic Publisher, Boston, 2002)
[12] FARRELL J.A., POLYCARPOU M.M.: ‘Adaptive approximation
based control’ (Wiley, Hoboken, NJ, 2006)
[13] KIM B.S., CALISE A.J.: ‘Nonlinear flight control using neuralnetworks’, AIAA J. Guid, Control Dyn., 1997, 20, pp. 26–33
[14] RYSDYK R.T., CALISE A.J.: ‘Nonlinear adaptive flight control
using neural networks’, IEEE Control Syst. Mag., 1998, 18,
pp. 14–25
[15] HOVAKIMYAN N., NARDI F., CALISE A.: ‘Adaptive output
feedback control of uncertain nonliear systems using
single-hidden-layer neural networks’, IEEE Trans. Neural
Netw., 2002, 13, (6), pp. 1420–1431
[16] ENNS R., SI J.: ‘Helicopter trimming and tracking control
using direct neural dynamic proramming’, IEEE Trans.
Neural Netw., 2003, 14, (4), pp. 929–939
[17] KANNAN S., JOHNSON E.: ‘Adaptive trajectory-based
flight control for autonomous helicopters’. Proc. 21st
D ig ital Avionic s S ys te ms Conf. , O ctober 2 00 2,
p. 8.D.1.1–8.D.1.12
[18] JOHNSON E.N., KANNAN S.K.: ‘Adaptive trajectory control for
autonomous helicopters’, AIAA J. Guid. Control. Dyn., 2005,
28, pp. 524–538
[19] RAIMUNDEZ J.C., CAMANO J.L., BALTAR J .A.: ‘MIMO outputfeedback adaptive neural network control of an
autonomous scale model helicopter mounted in a 2DOF
platform’, Proc. World Autom. Cong., 2004, 15, pp. 215–222
[20] TEE K.P., GE S.S., TAY E.H.: ‘Adaptive neural network control
for helicopters in vertical flight’, IEEE Trans. Control Systems
Technol., 2008, 16, (4), pp. 753–762
[21] FUNAHASHI K.I.: ‘On the approximate realization of
continuous mappings by neural networks’, Neural Netw.,
1989, 2, pp. 183–192
[22] N AR EN DR A K .S ., A N NA SWA MY A .M .: ‘A new
adaptive law for robust adaptation without persistent
IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941 – 956 955
doi: 10.1049/iet-cta.2008.0103 & The Institution of Engineering and Technology 2009
www.ietdl.org
Authorized licensed use limited to: National University of Singapore. Downloaded on August 5, 2009 at 10:07 from IEEE Xplore. Restrictions apply.

8/12/2019 CTA09 Heli
http://slidepdf.com/reader/full/cta09-heli 16/16
excitation’, IEEE Trans. Autom. Control , 1 98 7, 32 ,
pp. 134–145
[23] NARENDRA K.S., ANNASWAMY A.M.: ‘Stable adaptive systems’
(Prentice Hall, Englewood Cliffs, NJ, 1989)
[24] LEWIS F.L., YESILDIREK A., LIU K.: ‘Multilayer neural networkrobot controller with guaranteed tracking performance’,
IEEE Trans. Neural Netw., 1996, 7, (2), pp. 388–399
[25] SLOTINE J.-J.E., LI W.: ‘Applied nonlinear control’ (Prentice-
Hall, Englewood Cliffs, NJ, 1991)
[26] GE S.S., ZHANG J.: ‘Neural-network control of nonaffine
nonlinear system with zero dynamics by state and output
feedback’, IEEE Trans. Neural Netw., 2003, 14, (4),pp. 900– 918
[27] KHALIL H.K.: ‘Nonlinear systems’ (Prentice Hall, NJ, 2002,
3rd edn.)
956 IET Control Theory Appl., 2009, Vol. 3, Iss. 7, pp. 941–956
& Th I tit ti f E i i d T h l 2009 d i 10 1049/i t t 2008 0103
www.ietdl.org