Embed Size (px)
Citation preview

proportional to δ 2 . As far as the signal-to-noise ra t io for a fixed probabil i ty of error is concerned, ampl i tude detect ion is superior to m o m e n t detection for speeds of signalling between \.2W a n d 2W pulses per second, and m o m e n t detection appears to offer an advan tage a t other speeds. Wi th respect t o a signal-to-noise rat io of 17.4 db a t a speed of 2W pulses per second, i t appears t ha t momen t detection holds mos t promise of improvement in cases of low
signal-to-noise rat io where low speeds of signalling are tolerable and in cases of high signal-to-noise ra t io where high speeds of signalling are required.
References 1. M A T H E M A T I C A L M E T H O D S OP STATISTICS (book), H. Cramer. Princeton University Press, Princeton, N. J., 1946, p. 223. 2. T H E O R E T I C A L A N D E X P E R I M E N T A L R E S E A R C H I N C O M M U N I C A T I O N T H E O R Y A N D A P P L I C A T I O N , F I N A L R E P O R T , J. J. Slade, Jr., S. Fich, D. A. Molony, L . F. Nanni. Contract no. ΌΑ-36-039-sc-15314, Mar. 18, 1954, pp. 52-56.
3. T H E I N T E G R A T I O N M E T H O D OF D E T E C T I O N A N D I T S A P P L I C A T I O N TO T H E T R A N S M I S S I O N OF T E L E T Y P B S I G N A L S , H. F. Harmuth. Proceedings, National Electronics Conference, Chicago, 111., vol. 10, 1954, pp. 286-92. 4. Slade, Jr., et al, loc. cit., p. 44. 5. A F I R S T LOOK AT R A N D O M N O I S B , S. O. Rice. AIEE Transactions, vol. 75, pt. I, May 1056, pp. 128-31. 6. M A T H E M A T I C A L A N A L Y S I S OF R A N D O M N O I S E , S. O. Rice. Bell System Technical Journal, New York, Ν. Y., vol. 23, 1944, pp. 282-332. 7. Slade, Jr., et al, loc. cit., pp. 48-49. 8. T H E P H I L O S O P H Y OF P.C.M., Β. M. Oliver, J. R. Pierce, C. E» Shannon. Proceedings, Institute of Radio Engineers, New York, Ν. Y., vol. 36, 1948, pp. 1324^31.
Dynamics a n d C o n t r o l of N u c l e a r
r o w e r Plants
A . B. V A N R E N N E S J. C . S I M O N S , JR. T. S. G R A Y NONMEMBER AIEE NONMEMBER AIEE FELLOW AIEE
TH E E V O L U T I O N of the control philosophy and consequent design
of the control system for a nuclear central-station power p lant reflects a merger of present experience in two areas; namely, control of existing hydrocarbon-fueled central-stat ion plants , and control of mobile, production, and research type nuclear reactors.
The extrapolations to the t present problem are greatest in the nuclear area. In comparison with hydrocarbon-fueled central-station systems there m a y be some increase in capacity, an entirely different source of hea t for the boilers, and a considerable variat ion in the fueling procedure with fissionable fuel. Previous relevant experience with nuclear reactors is derived from small mobile s team-generating power plants, from relatively high-power production reactors, and from high-flux research reactors. Near ly all these installations are externally controlled and are fueled only while shut down. In contrast , m a n y of the
Paper 5 7 - 3 9 0 , recommended by the AIEE Nucleonics Committee and approved by the AIEE Technical Operations Department for presentation at the Engineers' Joint Council Nuclear Engineering and Science Congress, Cleveland, Ohio, December 14, 1955, and the AIEE Winter General Meeting, New York, Ν. Y., January 2 1 - 2 5 , 1 9 5 7 . Manuscript submitted September 4, 1 9 5 6 ; made available for printing January 3 1 , 1957 . A. B. V A N R E N N E S is with the Bendix Aviation Corporation, Detroit, Mich.; J. C. S IMONS, JR. is with National Research Corporation, Cambridge, Mass. ; and T. S. G R A Y is with the Massachusetts Institute of Technology, Cambridge, Mass. The work described was performed as part of Project Dynamo, a study sponsored by the Atomic Energy Commission at the Massachusetts Institute of Technology.
presently conceived central-stat ion reactors are self-regulating and are designed so t h a t refueling operations m a y be carried on while the reactor is cont inuously delivering power.
This paper presents some of the control philosophy t h a t dictates the manner in which control is to be accomplished, and some of the system design considerations t h a t are common to m a n y reactor p lants incorporating hea t exchangers.
Methods of Control in Fossil- and Fissile-Fueled Plants
T h e combinat ion of a nuclear reactor and a turbogenerator in an assembly for the purpose of generating central-stat ion electric power poses some unique problems in control. The problems arise chiefly from the fact t h a t a nuclear reactor is unlike a fossil-fueled plant , in which the fuel residence t ime is a t most a few minutes .
I n conventional plants, the hea t source is made to deliver hea t in accordance wi th the demand for" s team power through adjus tment of the ra te of feed of fuel to the burners . An increase in power demand results in a slightly lowered s team pressure, which through an automa t i c combust ion, controller increases the fuel r a t e sufficiently to re tu rn the s team pressure to i ts normal value. Because of the short fuel residence t ime, the hea t r a t e closely follows the fuel ra te .
On the other hand, once a nuclear
reactor is fueled initially, it may not need refueling for a period of months or years. Hence control of a nuclear reactor through control of the fissionable fuel input is impractical. Enough fuel to last a long t ime mus t be installed all a t once in order t h a t the chain reaction take place a t all.
In m a n y nuclear p lant concepts, the reactor is made to deliver hea t in accordance with the demand for s team power through adjus tment of the reactivity. An increase in power demand results in decreased s team pressure, which through au tomat ic or inherent control causes a temporary change in reactivity, thereby increasing the ra te of fuel consumption, and hence the power, unti l the steam pressure re turns to i ts normal value and the power generated equals the power demanded.
A useful point of view is to consider the reactor as a source of heat t h a t replaces the fuel input to the boiler in a central-stat ion plant . Automat ic or inherent control of i ts ra te of heat generation thus is needed to match the fuel-feed control function in the conventional plant , a function t h a t acts to make the power delivered equal to t h a t demanded by the boiler and load.
Methods for Changing Reactivity
In a nuclear reactor, the excess react iv i ty is the independent variable through which control is effected. I t determines the relative r a t e of increase in neutron concentrat ion, and hence the ra te of increase of power level. Thus a change in power level is related to the t ime integral of the excess react ivi ty t h a t causes the change. T h e ou tpu t power is the t ime integral of the input , excess reactivity. Consequently for a s tep of excess reactivity, the power builds up indefinitely with t ime. I n th is respect the reactor is a dynamically unstable integrator, or velocity device. Feedback control, either
J U L Y 1 9 5 7 Van Rennes, Simons, Jr., Gray—Control of Ntielear Power Phnts 2 7 9

external or internal, is needed to transform it into a stable proportional device.
Adjustment of reactivity can be made in many ways, such as by the insertion or withdrawal of fuel or absorbing material , either in a solid (rod) or liquid (concentrat ion) form; by a change in aspect of a reflector or moderat ing element; or by a change in one of the physical parameters of the reactor, such as density or temperature. Classically, the position of neutron-absorbing (boron, hafnium, or cadmium) control rods has been the means for adjust ing reactivity in a thermal reactor.
Stabilization of the Reactor
T h e central problems to which reactor control engineers have given most of their a t ten t ion are the regulation of the reactor s teady power level against r andom changes in react ivi ty introduced from extraneous sources; t he na tu re of the transient response of the power level and reactor t empera ture to accidental or deliberate react ivi ty dis turbances; and control of the power level in accordance with power demand. T h e technique of regulation is to provide feedback to the
short mean neutron lifetimes i t requires a relatively high speed of response and considerable rod-driving power. T h e resulting equipment tends to be unreliable and its behavior upon failure can be dangerous to the plant .
Reactors having tempera ture coefficients of react ivi ty t h a t are negative possess the desired feature of inherent self-regulat ion. 1 T h e negat ive tempera ture coefficient m a y be considered to const i tute pa r t of an internal feedback loop within the reactor which tends to main ta in the average reactor tempera ture cons tan t , 2 as
8 K , E X T R A N E O U S
F E E D W A T E R F L O W
C O N T R O L
'OV R E A C T O R T H E R M A L D Y N A M I C S
- T E M P E R A T U R E C O E F F I C I E N T ( N E G A T I V E )
S K T E
8 k
R E A C T O R N E U T R O N K I N E T I C S
C O N T R O L F U N C T I O N
N O . 2
R E A C T I V I T Y SHIM
C O N T R O L
I I
[ R E A C T I V I T Y " ] ( R E G U L A T I N G I C O N T R O L J
P R E S S U R E ι R E G U L A T I N G
C O N T R O L L E R
5 N E U T R O N
F L U X I N S T R U M E N T A T I O N
H O T L E G P I P I N G
( T R A N S P O R T D E L A Y )
E X C H A N G E R r - i
C O L D L E G P I P I N G
( T R A N S P O R T D E L A Y )
? i I
I
! f
C O O L A N T F L O W R A T E
C O N T R O L ( I F A N Y )
T H R O T T L E
V A L V E S
T U R B O
G E N E R A T O R S
E L E C T R I C A L O U T P U T
T H R O T T L E C O N T R O L
— ?
Γ Ι
j P L A N T O P E R A T O R
C O N T R O L F U N C T I O N
NO. I
E L E C T R I C A L D E M A N D
( S E T B Y L O A D D I S P A T C H E R )
S T E A M P R E S S U R E
I N S T R U M E N T A T I O N
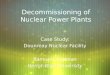
Fis . 1 · Block d iagram of p o w e r p lant inc lud ing f e e d b a c k control loops
In research and production reactors i t has been usual practice to position these rods so as to mainta in a constant (or otherwise specified) neutron concentration a t one or more neutron flux detectors within the reactor. I n a central-station power plant, in which the reactor is closely coupled to a turbogenerator, the power demand of the turbine determines the operating conditions of the reactor. This control is often exerted through the intermediate effect of the steam pressure, a dependent variable, which acts in tu rn to position control rods or to effect other means of adjusting the reactivity.
inpu t from the ou tpu t of the device in such a way t h a t changes in the ou tpu t tend to be opposed b y the effect of the resulting change in the input . T h e resulta n t system then is self-regulating.
A commonly used method for stabilization of power level is to measure neut ron flux with a device such as an ionization chamber, and to employ the resulting electric signals to position a neutron-absorbing control rod. T h e neut ron flux a t the neut ron detector, and hence the power level, is main ta ined constant . This method has been used extensively, bu t for effective control of reactors with
is shown in the heavy rectangle marked reactor a t the upper left of Fig. 1. Separa te addit ional means for regulating the neut ron flux and power o u t p u t through neutron-flux ins t rumenta t ion is i l lustrated as a loop, shown by a dashed line, below the rectangle.
If all other parameters affecting react iv i ty such as control-rod position, fuel, and poison content are fixed, the reactor having a negative tempera ture coefficient of react ivi ty is critical only a t a particular temperature . A t any other tempera ture the power developed is no t constant b u t tends to rise or fall. I n response to a
2 8 0 Van Rennes, Simons, Jr., Gray—Control of Nuclear Power Plants J U L Y 1 9 5 7

COOLANT SENSIBLE HEAT
TRANSPORT RATE STEAM HEAT
TRANSPORT RATE F ÇT H
HEAT EXCHANGER
]
i T q v
NUCLEAR j AVERAGE POWER I REACTOR
TEMPERATURE p !
i THERMAL
POWER
I
τ α ν TS AVERAGE AVERAGE
TEMPERATURE TEMPERATURE ON ON
COOLANT SIOE STEAM SIOE
HEAT TRAf* SFER RATE U A ( T Q V - T S )
1
FCT C
TURBOGENERATOR
COOLANT SENSIBLE HEAT
TRANSPORT RATE I
F C ( T H - T C ) = U A ( T a v - T s )
G C W T W
FEEOWATER SENSIBLE HEAT TRANSPORT RATE
= G ( h s - c w T w )
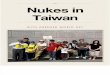
F ig . 2 . Schemat ic d iagram o f e n e r g y flow in s teady state
POWER TO LOAD
(|-T/)Qj HEAT RATE TO COOLING WATER
change in power demand, the surplus or deficiency of power generated causes the reactor temperature temporarily to rise or fall. This tempera ture change causes the reactivity first to fall or rise correspondingly. The power generated, in turn , falls or rises beyond the newly demanded value, causing the temperature to re turn to the value corresponding to criticality a t the same t ime t h a t the power generated reaches equali ty with the power demanded. Any such power t ransient mus t end with eventual re turn to the same temperature , bu t a t the new required power level. A variat ion in reactivity due to some other cause will result in es tablishment of a different temperature a t which criticality is again at ta ined.
Nomenclature
Ρ = reactor power F — coolant mass flow rate c — specific heat of coolant Τ H = temperature of coolant leaving reactor Tc — temperature of coolant entering reactor U — over-all heat transfer coefficient of heat
exchanger A =hea t transfer area of heat exchanger r a v = average coolant temperature in re
actor = average coolant temperature in heat exchanger
Ts — steam temperature G = mass flow rate of steam = mass flow rate
of feedwater hs = heat content of steam per unit mass cw = specific heat of feedwater Tw — temperature of feedwater Q = power absorbed by turbines and con
densers η = thermal and mechanical efficiency of
turbogenerator 77<2 = electric power delivered to bus bars Ci: = concentration of ith delayed emitter
(six in all) n = neutron concentration δΚ = increment in reactivity \i — decay constant of ith. delayed emitter β — Σβί = fractional contribution to total
neutron population by all delayed emitters
βίfractional contribution to total neutron population by ith delayed emitter
/ = neutron lifetime S = contribution to rate of increase of
neutron concentration from neutron source within reactor
M ' = m a s s of total coolant in reactor, heat exchanger, and coolant loop
Static Plant Control
T h e pr imary control of any central-stat ion p lan t lies wi th the load dispatcher, who orders a change in the electrical outp u t delivered to the bus bars by the plant in response to the demands of the power distr ibution network. T h e p lan t operator adjusts his electrical ou tpu t according to the load dispatcher 's orders b y varying the s team flow to the turbines, as indicated in Fig. 1 .
T h e identification of electrical demand as the pr imary control signal for a nuclear central-station p lan t is the major distinction from a research or production reactor, since control of these la t ter types has always been based on maintaining the neutron flux density a t a level prescribed by requirements of an experiment or by production considerations.
Wi th electrical demand established as the pr imary control, the variat ions of other p lan t variables with power ou tpu t mus t be examined to determine whether the resulting ranges of values are compatible with the l imitations of equipment and materials .
For those reactors stabilized by a negative tempera ture coefficient f, the average tempera ture within the reactor P a v tends to be mainta ined a t a constant value, independent of the ra te of energy released within the reactor P , unless external variat ions of reactivi ty occur. The dependence of other variables in the plant on Ρ can be found by consideration of the per t inent energy balances. I n the stat ic condition (all variables constant in t ime), these ra tes of energy transfer mus t be equal :
1 . The power generation in the reactor.
2. The net rate of heat transport by the primary coolant.
3. The heat transfer rate across the heat exchanger tubes.
4 . The net rate of heat transport b y the steam and feedwater.
5 . The rate of energy absorption b y turbines and condensers.
Fig. 2 is a schematic description of the several ra tes of energy flow. T h e equivalent mathemat ica l s ta tement is
P = Fc(TH-Tc) = UA(Tsv-T,) -Gfa-cTJ-Q ( 1 )
T h e analytical expressions evident ly neglect intermediate hea t losses, and the temperatures indicated m a y no t be measurable. Nevertheless the picture is one which adequately describes the process and from which some characteristics of the plant m a y easily be deduced. I t is convenient and reasonable to m a k e t he addit ional assumption
T*,-\{Ta+T0) ( 2 )
For simplicity and reliability, and to avoid the complications in dynamic behavior t h a t would otherwise result, F is usually held constant .
If in those reactors having a significant temperature coefficient, jT a v is maintained constant , equat ions 1 and 2 force Τ Η and Tc t o follow the pa t t e rn of Fig. 3 , since TH—TC mus t be proport ional to power P . Since U does not change greatly with operat ing conditions, Tur—Ta also is proportional to power. Ts is very nearly the sa turat ion tempera ture of the s team leaving the boiler, and so the s team pressure is determined as the sa tura t ion value p corresponding to Ts. T h e tempera ture of the s team delivered to the turbine m a y be increased above Ts b y superheaters, b u t their use does not material ly affect t he energy flow pa t te rn .
Fig. 3 indicates t h a t in a tempera ture-regulated reactor, as the pressure p, temperature Ts, and the value of hs corresponding to Ts drop with increasing power P , the s team flow ra te G mus t increase with Ρ a t a ra te faster t han proportional. T h u s with P a v cons tant ; i.e., wi thout any external change of reactivity, the
F ig . 3 . Static p lant characteristics wi th T a v
C O n S t a n t P REACTOR POWER (PER OEHT)^
J U L Y 1 9 5 7 Van Rennes, Simons, Jr., Gray—Control of Nuclear Power Plants 2 8 1

Te • Te
Fig . 4. Static plant characteristics wi th constant
steam pressure
P R E A C T O R P O W E R ( P E R C E N T )
desired electric load -qQ may be supplied simply by proper adjustment of G; in other words, by adjustment of the steam thrott le . The steam pressure p varies with G.
Hence, assuming a dynamically stable plant, variat ions in the electric load demand can be met simply b y changing the steam throt t le , without changing the external reactivity adjustment. However, s team pressure falls rapidly with increasing load, and so does plant efficiency. If s team pressure and plant efficiency are established by the full-load requirements, the steam pressure rises considerably higher a t low loads. Steam plant equipment and auxiliaries, commonly designed to operate a t constant steam pressure, do not perform well at other s team pressures, and actually may fail to operate, e.g., if the s team pressure exceeds the maximum head of the feed-water pumps.
To achieve opt imum plant performance, it is therefore necessary to impose an additional restriction on operation, namely tha t the s team pressure be maintained essentially constant, independent of power output .
The consequence of this restriction can be determined from equation 1. Specifying the pressure p also fixes Ts and hs; thus the net heat t ransport ra te to the turbine and condenser per uni t mass of steam, hs—cwTW} is constant. Steam flow G and ΤΆν—Τ8 thus vary linearly with power as shown in Fig. 4.
SLOPE = - 6 d b / 0 C T A V E
LOG α ( ω = α )
LOG ω
The tempera ture difference TH—TC also is proportional to power. Since Ts is constant , T&Y, TH, and Tc mus t now rise linearly with increasing power.
The most impor tan t of these variat ions caused by an increase of power level is the increase of Tav, since the react iv i ty reduction resulting therefrom mus t be cancelled by an accompanying increase of external reactivi ty. T h e increase required (see Fig. 1) is
( 3 )
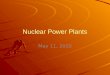
F ig . 5 . A s y m p t o t i c approx imat ion for a m p l i t u d e of reactor transfer funct ion
where Δ Γ β ν is the increase of average temperature in accordance with Fig. 4, and the numerical value for f is negative. This adjustment in react ivi ty is the adjus tment b y which s team pressure is maintained constant , and is most readily made by a feedback control loop which senses changes in s team pressure. Thus , in addition to the pr imary control function, t h a t of matching electrical demand, a secondary control loop mainta ins s team pressure a t the desired value b y adjustment of reactivi ty, as shown in Fig. 1. This secondary control function may be either manua l or au tomat ic .
Block Diagram of Entire System
The block diagram of Fig. 1 represents one concept of a complete power plant , including the two control loops t h a t govern the p lant in the operat ing or power range (10% to 100% full power). The blocks are by no means restricted to linear components. T h e diagram is intended to represent the complex p lant b y the simplest description t h a t adequately shows the flow of energy and information between components impor tan t to the static and dynamic behavior of the plant . The supervisory or safety circuits are not shown, since they act only if abnormalit ies develop which cause any of the monitored variables to exceed preset limits. Wi th minor exceptions or revisions the diagram can correctly represent many nuclear jxwered central-station systems.
Dynamic Behavior of Total Plant
Whether stabilization is accomplished by means of a negative tempera ture coefficient or by an external control system, a feedback system exists whose dynamic stability mus t be examined under the various possible operating conditions. Analytical determinat ion of the dynamic stability of a reactor and its associated power plant is extremely difficult since the dynamic thermal characteristics of the reactor, hea t exchangers, and coolant piping interact strongly with each other.
T h e distributed na tu re of some components usually renders simple ma th ematical descriptions completely invalid, and more sophisticated representat ions become too clumsy to handle . I n the next sections some methods of approach are discussed which m a y prove useful in establishing approximate behavior or limits on the behavior.
Reactor Dynamics
T h e kinetic behavior of a nuclear reactor is adequately described for control purposes by the familiar set of equat ions :
dn δΚ-β dt Ί Σ dd βί χ „
( 4 A )
( 4 B )
For practical application, this seventh-order description is unwieldy, and so several approximate methods for expressing the reactor characteristics are used, depending on the purpose of the analysis. For studying small-amplitude excursions about an operating point, a linearized representation is appropriate . Such representations for conventional U-235 reactors (in which 0 .76% of the neutrons are delayed) have been described elsewhere . 3 Within moderate relative power ranges a simplified Laplace transfer function of the form 4
n(s) n(s-\-\) R^ = 7FT\βΓ7~~Γ\in w h i c h a > x (5' 8K(s) ls(s+a)
is usually adequate . An asymptote approximat ion 6 to the
ampli tude of the transfer function R(jœ) from equat ion 5 , (on decibel versus log ω scales) is shown in Fig. 5 . I t reveals t h a t the reactor behaves approximately as an integrator b u t wi th decreased gain a t low frequency, because of the effect of delayed neutrons.
I n Ό-233 reactors, the form of the representat ion is the same, b u t the fraction of neutrons delayed is only 0 .24% and the relative concentrat ion of the characteristic delayed emit ters is different, so t h a t the separation between λ and a on the frequency scale is reduced. T h e stabilizing effect of the delayed neutrons is less and a smaller positive react ivi ty excess can make the reactor p rompt critical. Likewise, in reactors ul t imately fueled part ial ly with Pu-239 (either through loading or through conversion), the fewer delayed neutrons result similarly in a modified system function.
A further complication arises when reactors involving circulating fuel are
282 Van Rennes, Simons, Jr., Gray—Control of Nuclear Power Plants J U L Y 1957

studied. In these, a majori ty of the delayed neutrons exist outside the reactor core, so t h a t of all the delayed neut rons only a fraction proportional approximately to the fractional fuel residence t ime within the core contribute to reactor kinet ic behavior. In a particular U-233 reactor concept, for example, only about one t en th of the neutrons t h a t are delayed (1/10 of 0.24%) are emit ted in the core. Consequently the stabilizing effect of the delayed neutrons is almost negligible.
In reactors where very few delayed neutrons are available, or where large or rapid reactivi ty excursions are being contemplated, the contribution of the delayed neutrons is often neglected; i.e., p rompt criticality is assumed. T h e simplified kinetic equation for a reactor under these conditions
T a b l e I . K ine t ic Parameters of Representat ive Reactor Concepts
dn δΚ —~ = -—n dt I
can also be wri t ten
dt~ I p
( 6 )
( 7 )
since the power released is proport ional to the ra te of fission, which in t u rn is proportional to the neutron concentrat ion. If the quant i ty Ρ on the right-hand side of equation 7 is assumed constant a t a value P 0 , the Laplace transfer function for the incremental behavior of the reactor is found by the usual methods to be
P(s) _Pp *K(s) Is ( 8 )
This transfer function is useful in linear incremental analyses only for relatively small fluctuations in P. T h e reactor characteristic is then like t h a t of an integrator, bu t with its coefficient of proportionality proportional to the quiescent power level. For larger ranges of variation, the nonlinear differential equat ions, equations 4, of the system mus t be considered directly, 6 or a system analysis based upon logarithmic functions of flux and power must be used. A set of re levant kinetic parameters for four different reactor concepts is presented in Table I .
Short-Term Dynamics With Temperature Feedback
The foregoing discussion considers the excess reactivity as an independent variable. Actually the reactor is pa r t of a dynamic feedback system composed of the reactor neutron kinetics, reactor thermal characteristics, and the negative temperature coefficient of reactivity as shown within the reactor block shown in Fig. 1. The feedback loop relates the significant
Type of Reactor Neutron Lifetime
Fuel (Seconds) 0β« = Σ€ ί /&<*
U-235 0 . 0 0 0 0 3 0 . 0 0 7 6 0 . 0 0 7 6 . . . - 0 . 0 0 0 3 0 U-235 0 . 0 0 0 6 0 . 0 0 7 6 . . . . 0 . 0 0 7 6 . . . - 0 . 0 0 0 0 2 U-233 0 . 0 0 7 0 . 0 0 2 4 . . . . 0 . 0 0 0 2 7 . . . - 0 . 0 0 0 3 6 U-233.... 0 . 0 0 1 7 . . . 0 . 0 0 2 4 . . . . 0 . 0 0 0 5 7 . . . - 0 . 0 0 1 1
* The term eï = that fraction of each delayed neutron component which contributes to the delayed neutron population in the core, t Degrees centigrade.
variables, power P 0 , average reactor tempera ture ΤΛν, and excess react ivi ty δΚ, as indicated; and δΚ depends on the other variables because of the feedback. T h e system can be represented in a quasi-s ta t ionary manner b y the equat ions
P = Fc(TH-Tc)+Mc dT&v
dt
( 1 0 ) δΚ = ζ(Τ&ν-Ττβύ
together wi th equat ions 4(A) and 4(B) which describe the neutron kinetics. Here M is the mass of the coolant within the reactor and the other symbols have the same meanings as before. Actually the t empera ture contr ibut ion to the react ivi ty is determined b y the integra ted weighted tempera ture distr ibution th roughout the reactor, b u t for purposes of analysis i t is convenient to assume t h a t a mean t empera tu re 7 \ V can be defined, in terms of which the react ivi ty dependence on tempera ture is given by equat ion 10. For this quasi-stat ionary analysis, Tc is considered an independent variable. Any dependence of Tc on TH (via the hea t exchanger) is, for the moment , neglected.
If the further assumption of equat ion 2
T&V=-2(TH+TC)
is made , equation 9 becomes
dT&v P = 2Fc(T»v-Tc)+Mc
dt ( I D
which yields the transformed relationship
T a v ( s ) ' 1 [P(s) '
(l + rs)l2Fc ( 1 2 )
T h u s the transfer function of the thermal load is
Tav(s) 1
2Fc ( 1 3 ) P(s) (1 + TS)
in which the t ime constant τ is defined as M/2F and is one half the t rans i t t ime of the coolant through the reactor. Equa tion 13 indicates t h a t in the t ime domain the response of the average reactor tempera ture 7 \ ν , t o a un i t s tep in nuclear power P , is a rising exponential having an ampl i tude 1/(2Fc) and a t ime constant
τ. T h e block-diagram equivalent of the system is given in Fig. 6 with the reactor kinetics represented simply by equation 8. Recall t h a t the symbols in the above equat ions represent increments in the variables.
T h e degree of s tabi l i ty of the system of Fig. 6 can now be examined. The Stability of a feedback system describable by linear equat ions is evaluated by plott ing on the complex plane as a function of frequency the locus of the loop transmission or loop gain; i.e., of the product of the transfer functions around the loop. Thus , if the reactor is characterized b y equat ion 8 and the hea t transfer mechanism b y equat ion 13, the loop transmission is the product locus ÇR(jœ)H(jcû). This p roduc t locus appears as shown in solid lines in Fig. 7.
The loci in Fig. 7 shown b y dashed lines are those resulting when the effect of delayed neut rons is significant, so t h a t the reactor mus t be characterized by equation 5. T h e proximity of the ÇR(jœ)H(jœ) locus to the point (—1,0) determines the degree of s tabi l i ty; for the system to oscillate in an undamped manner , the locus m u s t pass through or encircle this critical point . Because the transfer funct ion R(s) of a reactor alone is proportional to the power level, the loop gain of this feedback system is likewise proportional to the power level. According to this model, however, the system is never capable of s teady oscillation, because the effect of an increase in loop gain is only to bring the product locus into closer proximity to the unstable point, regardless of the parameter values in the transfer functions H(jœ) and R(jœ). On the other hand, i t mus t be recognized t h a t a t ransient disturbance can cause damped oscillations or severe overshoots if the loop gain is reasonably large.
F rom a s tudy of the reactor block diagram in Fig. 1, one recognizes t ha t the reactor behavior is determined by two independent variables; namely, the extraneous reactivi ty, δΚβχι, and the temperature of the entering coolant Tc. The over-all transfer functions in response to these two excitations relate increments in reactor power P(s), and average temperature
J U L Y 1 9 5 7 Van Rennes, Simons, Jr., Gray—Control of Nuclear Power Plants 283

_Ρ_ US
REACTOR NEUTRON KINETICS
δκ τ
I 2Fc
REACTOR T H E R M A L DYNAMICS
j TOV 1 /
L+TS \
F ig . ό . F e e d b a c k l o o p that provides reactor stabi l izat ion b y negat ive temperature c o
eff icient
TAV(s), to increments in 8Kejit(s) and Tc(s), in the following manner
PQ(1 + TS)
ls(l + rs)- I * -~(2Fc)
2 P e
( 1 4 )
II 2Fc T*v(s)
BKexi(s)~~' Pi
Per -fê)
( 1 5 )
(2Pe) \ ω Λ co r e
2/ ( 1 6 )
Tc(s)" ls(l
is _ ( - Γ Δ Γ ) 5
(2Fc) \ ωη ωη1/
where the substi tutions
2/Pcr
1
2 ί τ
Î - 2 f P * r V -2£ΔΓτ
AT=— = (TH — Tc) Fc
( 1 7 )
( I S A )
( 1 8 B )
( 1 8 C )
( 1 8 D )
have been introduced. (Note tha t the definition of f includes the sign of the tempera ture coefficient, so t ha t for negative temperature coefficients —f is a positive quant i ty and ωη is a real number.)
These transfer functions are useful in interpreting the various features of the
t ransient response of the reactor to disturbances of 8Ke7Lt or Tc. Equa t ion 14, for example, when compared with the simple transfer function of a reactor only, equat ion 8, verifies t h a t the effect of temperature feedback is to convert the integrating characterist ic of a reactor to one essentially proport ional in na ture . T h e characteristics of chief interest are maxim u m ampli tude, r a t e of a t tenuat ion , oscillation frequency, and final s teady-state value. Final values in response to un i t step excitations can be obtained from the stat ic p lan t relations, b u t they can be found more readily from the transfer functions by sett ing s equal to zero in equations 14 to 17. I t is not difficult in any of these transfer functions to show t h a t the peak ampli tude of the response to a step input never exceeds twice the final deviation of the dependent variable from its initial value. (This fact has previously been s ta ted as Nordheim's accident theorem.) Since Ρ 0 / Δ Γ ( = Fc) is a constant independent of P 0 , the peak ampli tude of the response to a δΚ0Χ± s tep depends only on the value of the step and not on the operat ing power level. T h e frequency and damping will change, however, with power level.
T h e model assumed in the foregoing does not include any t ranspor t t ime lags. Additional phase shifts m a y well be present so t h a t instabil i ty is still a possible consequence of excessive internal gain. To ensure stabil i ty in view of addit ional phase shift, i t is conservative to require a t least a 40-degree phase margin a t full power, which corresponds for the quadrat ic behavior to a damping rat io 7 of 0.4. If the power should increase to four t imes full power, 7 would drop only to 0.2 and the phase margin would be reduced to 25 degrees, which is still likely to be adequate . A t 1 0 % full power 7 becomes approximately 1.2, which is quite satisfactory. This stabili ty criterion can be expressed as
IFc - 2 r P o r ~
->0.4 ( 1 9 )
where P e is the full-power value. Alternatively one can write
0 .32 (~r )P 0 r<Pd ( 2 0 )
which shows t h a t there is a maximum limit on the product (—f)P 0 r . For a specified coolant flow ra te F and t ransport t ime 2τ in a part icular reactor, equation 20 imposes an upper limit on the value of power level P*. Exceeding this limit can cause not only highly under-damped behavior but , if addit ional phase lags exist, can actually lead to a growing oscillatory behavior. Linear incremental
H ( j w )
£ R ( j w ) H ( j w ) (ζ<0)
Fig . 7 . Locus d iagram of internal l o o p transmission w i th in reactor
analysis is inadequate fully to explore the possibility of runaway behavior in a reactor-powered p lan t ; the application of nonlinear dynamics to the concept of stabili ty in nuclear systems has been s t u d i e d . 6 - 8
If 7 is never less than 0.4 the transient response will never exhibit more than two significant overshoots. I t is also interesting to examine the quan t i ty yœn
which determines the ra te of a t tenuat ion of any transient . F rom equat ion 18(B) one sees t h a t yœn has the value 1/(2r) regardless of power level. This means, for example, t h a t after a t ime interval 4τ (twice the t ransi t t ime through the reactor) a t ransient ampl i tude will be a t t enua ted to within 1 5 % of its final incremental value. This result has desirable significance, for it indicates t h a t t ransients within the reactor are damped out in t imes quite short compared with the coolant loop circulation t ime; thus any resonance interaction between the reactor and the coolant loop tends to be filtered by the hea t exchanger.
This t r ea tment of the dynamic behavior within the reactor vessel has several l imitations. I t only sets forth the relationship between increments in the significant variables. I t is not a detailed description of the internal mechanism of the reactor, a l though it presents a reasonable external picture. Fur thermore , i t holds t rue only for t ime intervals less t han the coolant circulation t ime, 2r , since i t was tacitly assumed t h a t Tc was independent of the previous history of TH. In practice, the circulating coolant provides dynamic feedback from TH to Tc, thereby adding additional complication to the model over longer t ime intervals.
Long-Term Dynamics With Temperature Feedback
For t ime intervals long compared to the coolant circulation t ime, in other words, for very slow transients, the behavior of
284 Van Rennesy Simons, Jr., Gray—Control of Nuclear Power Plants J U L Y 2 9 5 7

the reactor, coolant loop, and heat exchanger depends on a different set of parameters. Assume tha t all of the circulating coolant has an average temperature R A V , which is the temperature governing the ra te of hea t transfer to water and steam a t a temperature Ts. The following relation then holds;
P=UA(T„-Ts) + M'c-dT&v
dt (21)
This expression considers the entire coolan t system to be essentially a lumped element ; i.e., it neglects the effect of transport delays of the circulating coolant. The equivalent transform relation is
R a v ( * ) =
vhere
p(s) . U A
+ Ts(s) ( 2 2 )
, M'c T ~ OA
This relation of F a v to Ρ is seen to be similar to equation 12, not only in form but also in t ha t it is an al ternate description of the thermal dynamics of the reactor. Consequently, equation 22 together with equations 8 and 10 describe a stabilizing feedback loop around the reactor. The equivalent block diagram is the same as t ha t of Fig. 6 with l/(2Fc) replaced by l/(UA), τ by τ ' , and Tc by Ts. The closed-loop transfer functions relating the dependent variables ΤΛν
and Ρ to the independent variable Ts are
P(s) T*(s)
y s
l's(l+r's)-Pi
'UA A \ oi„ ω» 2 / ( 2 3 )
l's(l + r's)-
( Δ Γ ' )
AU \ ωη ω„ν ( 2 4 )
where
Γ = - I (see equation 5, at low frequencies) λ
( 2 5 A )
Δ T' — — 7 = ( ΓΛΎ — Ts ) corresponding to P e
UA
- Γ Λ _ - R A R
: UAl'r' Vr'
( 2 5 B )
( 2 5 C )
( 2 5 D )
yjJj™-lJ-JLl ( 2 5 E ) 2 > -ζΡ,τ' 2 If -ζΔΤ'τ'
The t ime constant τ' is related to the coolant circulation t ime tc by
AT'
AT ( 2 6 )
Thus τ ' and tc are of the same order of magni tude. T h e a t tenua t ion factor yun
is equal to 1/(2τ ') ; hence any transient is reduced to within 1 5 % of i ts final incremen t value in a t ime 4 r ' , which is quite acceptable. Since excessively under-damped behavior is undesirable, the damping rat io y should be a t least 0.3, which establishes the addit ional criterion
o.m{-r)PoT'<i'UA ( 2 7 )
Equat ion 27, in a manner similar to equat ion 20, establishes a l imitation on reactor power Ρ if excessively under-damped behavior or growing oscillations are to be avoided. Whereas from equation 20
P o < -Z.llFc
equat ion 27 imposes the constraint
2 . 8 ^ / UA Po<-
( 2 8 )
( 2 9 )
- Γ τ '
Whether the short - term or long-term constraint is more restrictive depends on the relative values of the various parameters. ( In general, τ ' » τ and a>X.) This t rea tment , valid only for t ime intervals which are long compared with the coolant circulation t ime, presents an external picture of the incremental behavior of p lant variables. I t does not include the fact t h a t Ts and ΤΛν are interrelated by the thermal dynamics of the secondary coolant loop and s team turbine, dynamics which are difficult indeed to describe.
Summary
A s tudy of the s teady-state energy pa t te rn in a nuclear power p lant as a function of power level is necessary for proper synthesis of a complete system. Nuclear-fueled plants differ from conventional plants chiefly in t h a t the hea t source
alone has the characteristics of an integrator, i.e., a characteristic in which the time ra te of change of power level depends on the control variable, excess reactivi ty. The existence of a negative tempera ture coefficient of reactivi ty, if present, const i tutes an internal negative feedback loop which transforms the reactor characteristic into t h a t of a proportional device. I n the absence of other disturbance or control, this feedback dictates t h a t the average reactor t empera ture be independent of power level. A deliberate external control loop is necessary if s team pressure, steam tempera tue , or another appropriate p lant variable is chosen to be held constant .
Fur thermore , s tudy of the dynamic behavior of a nuclear power plant in which the reactor is closely coupled to a turbine through a hea t exchanger is essential to ensure satisfactorily stable performance. Dynamic analyses of the entire system are made first on the assumption t h a t the t ranspor t t ime of the coolant through the reactor is long compared with the t ime interval of interest, and second on the opposite assumption. These analyses lead to expressions given t h a t aid in evaluat ion of such characteristics as the max imum ampli tude, ra te of a t tenuat ion , oscillation frequency, and final s teady-state values of significant variables in the system.
References
1. N U C L E A R P O W B R P L A N T CONTROL C O N S I D É R A TIONS, M . A. Schultz. AIEE Transactions, vol. 72, pt. I, Mar. 1953, pp. 22-26. 2. S Y N T H E S I S O F CONTROL FOR N U C L E A R P O W E R P L A N T S , J. N. Grace. Convention Record, Institute of Radio Engineers, New York, Ν. Y., pt. 9, 1954, pp. 83-85.
3. P I L E T R A N S F E R F U N C T I O N S , J. P. Franz. Atomic Energy Commission document, AECD-3260, Of f ice of Technical Services, U. S Department of Commerce, Washington, D . C , July 18, 1949.
4. AUTOMATIC CONTROL O F P O W E R R E A C T O R S , M . A. Schultz. Atomic Energy Commission document, AECD-3163, Ibid., Nov. 6, 1950. δ. T R A N S F E R F U N C T I O N OF A R G O N N B CP-2 REACTOR, J. M . Harrer, R . E . Boyar, D. Krucoff. Nucleonics, New York, Ν. Y., vol. 10, no. 8, 1952, pp. 32-36. 6. T H E D E P E N D E N C E OF REACTOR K I N E T I C S O N T E M P E R A T U R E , J. Chernick. BNL 173, Brook-haven National Laboratory, Upton, Ν. Y., Dec. 20, 1951. 7. C O N C E P T OF S T A B I L I T Y FOR N U C L E A R R E A C T O R S , L. B. Robinson. Journal of Applied Physics, New York, Ν. Y., vol. 25, no. 4, 1954, pp. 516-18. 8. SOME A S P E C T S OF N O N L I N E A R D Y N A M I C S , W. K. Ergen, Α. M . Weinberg. Physica, Amsterdam, Netherlands, vol. 20, 1954, pp. 413-26.
J U L Y 1 9 5 7 Van Rennes, Simons, Jr., Gray—Control of Nuclear Power Plants 2 8 5