Embed Size (px)
Citation preview

Migration of backscatter data from the Mid-Atlantic RidgeAlistair J. Harding, Michael A. H. Hedlin, and John A. OrcuttInstitute of Geophysics and Planetary Physics, A-0225, University of California, San Diego,9500 Gilman Drive, La Jolla, California 92093-0225
~Received 16 September 1996; accepted for publication 31 December 1997!
In studies of low-frequency reverberation within the marine environment, a central concern is therelationship between reverberation events and morphological features of the seafloor. Atime-domain migration algorithm for the reverberation intensity field is developed that producesscattering coefficient maps coregistered with a bathymetry database. The algorithm is tailored tobroadband transient sources with good range resolution, and was developed to analyze an extensiveset of reverberation records from a 200–255 Hz source collected on the flanks of the Mid-Atlanticridge. The precise, sample-by-sample, tracking of wavefronts across elements of the bathymetrydatabase that forms the foundation of the algorithms implementation results in reverberation mapsthat show a clear and detailed correlation between scattering and morphology with narrow scarpslopes consistently highlighted. Environmentally induced asymmetries in transmission loss andincidence angle are exploited to break the inherent left–right ambiguity of the receiver array.Iterative migration, assuming a dominant dependence of backscatter on grazing angle, producesimages, even from individual records, that show good ambiguity resolution. Results from multiplerecords corroborate the effectiveness of the ambiguity resolution and demonstrate the stability of thescattering coefficient estimates and the acoustic system. ©1998 Acoustical Society of America.@S0001-4966~98!03104-X#
PACS numbers: 43.30.Gv, 43.30.Vh, 43.30.Pc@JHM#
cyateees
-ther
zekndRis
SRu
thve
n
i-minbeer
ns.en-ns
rstthe
andn-
the
t ares aoft ig-apsxisva-
--anere,am-re-thees
onssly
as
he
INTRODUCTION
In July of 1993, a coordinated set of low-frequenacoustics experiments were conducted on the western flof the Mid-Atlantic Ridge within a corridor that lay jusnorth of the Kane fracture zone. These experiments wdesigned to investigate and quantify the relationship betwacoustic reverberation and seafloor morphology and contuted the Main Acoustics Experiment~MAE! of a SpecialResearch Program~SRP!1 on bottom reverberation sponsored by the Office of Naval Research. Included withinexperimental suite were monostatic and bistatic reverbtion measurements by the research vessels CORY CHOUEST
and ALLIANCE, and near bottom measurements of low graing angle interactions using vertical arrays of hydrophonOne element of the reverberation experiments that mathem unique is the availability of detailed bathymetric ageophysical data for the area, collected on a pair of Ssponsored large-scale and small-scale geophysics cruThe bathymetric database includes a map of the entireexperimental corridor gridded at 200 m and finer scale sveys of selected areas with resolution on the order of 10 mbetter. It is the availability of these databases that permitsinvestigation, in detail, of the correspondence between reberation returns and bathymetry.
The process of mapping reverberation returns back othe seafloor scattering sites that produced them can beferred to as charting.2–4 Here we prefer to use the term mgration, because of the strong similarity of the methods eployed here to the Kirchoff migration method usedseismic reflection processing. The principal differencetween the two is that the reverberation data—beamformtime series of acoustic intensity—are assumed to be the
1787 J. Acoust. Soc. Am. 103 (4), April 1998 0001-4966/98/103(
nk
ren
ti-
ea-
-s.es
Pes.P
r-orer-
tore-
-
-d,e-
sult of incoherent scattering rather than coherent reflectioAlso, as is the case for seismic migration, we restrict atttion to selected primary paths and ignore multiple reflectioin the formulation of the method.
In outline, migration is accomplished in two stages; fithe seafloor is mapped into the time-beam coordinates ofdata, then the reverberation signal from a given beamsmall time interval is distributed over the corresponding esonified area of the seafloor. Migration is complicated byfact that data were recorded by a horizontal line array~HLA !and each beam is associated with a pair of directions thaoriented symmetrically with respect to the array axis, thureverberation return could originate from one of a pairdistinct ensonified areas. Simple mapping schemes thanore variations in seafloor depth produce reverberation mthat are perfectly symmetric with respect to the array aand provide no means of resolving, from a single obsertion, the inherent ‘‘left–right ambiguity’’ introduced by aHLA. Accounting for the bathymetry introduces ‘‘environmental symmetry breaking’’3,4—bathymetry induced variations in transmission loss, acoustic shadowing—which cbe exploited by algorithms, such as the one presented hto reduce substantially the left–right ambiguity, even forsingle ping. The difference between the environmental symetry breaking technique and the migration technique psented here is that the former assigns all energy to eitherleft or right side if the difference in transmission loss reacha predefined threshold, while the current technique partitienergy according to a set of weights that vary continuouas a function of transmission loss and other factors suchexpected backscatter strength.
An additional problem with simpler schemes is that t
17874)/1787/17/$10.00 © 1998 Acoustical Society of America

dthgsanisktr
or
arigit
itylsth
oxthattereat
hiollteth
erti-innlsrath
ae
nc
nr
latr
,o
oaaeesin.
byg
atu-fThelylso
deepofturea
. Intic
ns,
atnd
.sso-
ont
rceteredoftheelayin
edel
enttheeg-nts
min.pi-che, 2
ns-ionslydheafterring
e-is-they a
iousionst at
migrated images are in the time-beam coordinates of invidual transmissions rather than in global coordinates ofbathymetry, complicating the comparison of multiple pinand studies of the relationship between scatteringbathymetry. The current migration algorithm avoids thproblem by being formulated directly in terms of the bacscatter strength of individual elements of the bathymegrid.
The algorithm is based on a time-domain formulationthe incoherent scattering process which relates the scattestrength to the expected acoustic intensity via a large spmatrix. This formulation means that we could treat the mgration as a linear inverse problem and invert multiple pinsimultaneously for scattering strength. Combining pings wdiverse look angles would eliminate left–right ambigufrom the solutions. A linear inverse approach would aallow regularization constraints to be employed onsolutions.5
In this paper, we solve the scattering equations apprmately using a version of iterative backprojection underassumption that backscatter strength is spatially isotropica function only of the local ensonification and backscaangles, angles which are equal for the monostatic, dipaths considered here. The advantage of using iterative bprojection is that it is computationally fast and guaranteedproduce migrated images that satisfy the data exactly wonly weakly enforcing assumptions about the behaviorscattering strength. Iterative backprojection could potentiabe used as a basis for producing well resolved, migraimages in near real time. We use it here to rapidly checkconsistency of multiple images from successive reverbtion records of the MAE and to produce preliminary esmates of backscattering strength as a function of grazangle. The linear inverse approach outlined above will obe effective if the individual reverberation images are bacally consistent. Uncorrected errors in, for example, arheading or source location would substantially degraderesult of inverting multiple pings.
We concentrate on the analysis of a subset of the dnamely half-convergence zone (1/2 CZ), monostatic revberations from broadband, 200–255 Hz, linearly frequemodulated~LFM! transmissions recorded by the R/V CORY
CHOUEST. We chose this subset because it has the best raresolution and simplest propagation paths, and thus affothe best opportunity of investigating, quantitatively, the retionship between backscattering strength and bathymePrevious examinations of the SRP acoustics data havethe most part, concentrated on the longer range, continuwave ~cw! data, and have established that there is a brcorrespondence between high amplitude reverberationswell ensonified features at 1/2 and 1 1/2 CZ, with the highreturns from backfacing ridges. However, the detailed invtigation and quantification of this relationship is as yetcomplete; this paper represents one step in that process
I. OVERVIEW OF DATA AND EQUIPMENT
The MAE was conducted within an approximately 42° corridor on the flanks of the Mid-Atlantic ridge extendinfrom 45° W to 49° W and from 25°308 N to 27°308 N. The
1788 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
i-e
d
-y
fingse-sh
oe
i-endrctck-olefydea-
gyi-ye
ta,r-y
geds-y.forusdndst-
-
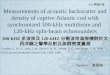
corridor lies within a larger area designated as an ONR nral laboratory,6 which straddles the Mid-Atlantic ridge itseland is bounded to the south by the Kane fracture zone.seafloor fabric within the corridor is dominated by lightsedimented, ridge parallel abyssal hills, but there are alarge sedimented ponds and the area is dissected bycorridors that are the fossilized, off-axis expressionspreading segment boundaries at the ridge axis. The feawhose backscatter we will examine in detail here is;30 km long abyssal hill, designated B8, that lies at thewestern end of one of the segment boundary corridorsparticular we will concentrate on a set of 1/2 CZ, monostareverberation returns recorded by the R/V CORY CHOUEST
that span the intersection of a pair of the experimental rurun 5a and run 6~Fig. 1 and Table I!. This intersection liesslightly northwest of a large set of intersecting tracks thconstitutes the focus of an extensive set of bistatic amonostatic experiments that had B8 as the primary targetWe have chosen the first intersection here because the aciated transmissions provide better ensonification of the frslope of B8 at 1/2 CZ.
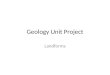
The basic features of the R/V CORY CHOUEST sourceand receiver arrays are shown in Fig. 2. The vertical souarray consisted of 10 elements spaced at 2.29 m and cenat 101 m, while the horizontal receiving array consisted128 hydrophone groups spaced at 2.5 m. Beamforming ofreverberation data was performed aboard ship using a dand sum beamformer with a Hamming window, resultinga nominal broadside beamwidth of;1.3°, measured at the23 dB point. The presence of dead or improperly gainphones in the HLA resulted in nearly uniform sidelobe levof approximately230 dB.1
The schedule of source transmissions for the experimwas conceptually arranged in a hierarchical fashion withbottom two levels in the hierarchy being transmission sments and individual source wavetrains or pings. Segmewere numbered consecutively and each one lasted 12Ping numbers were also numbered consecutively with tycally six source wavetrains being transmitted during easegment. For the portions of runs 5a and 6 examined herout of every 3 segments were used for R/V CORY CHOUEST
transmissions and the remaining segment for Alliance tramissions. One of the standard, usually the first, transmisswithin a CORY CHOUESTsegment was a 5-s duration linearfrequency modulated~LFM! signal chirped over the ban200–255 Hz. It had the largest bandwidth of any of tsource wavetrains and hence the best range resolutionmatched filtering,Dr 513.6 m; it is thus the best choice foexamining, in detail, the spatial structure of the scatterprocess.
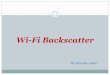
The structure of the LFM source wavefield out to byond a 1/2 CZ is shown in Fig. 3. The broadband transmsion loss was calculated by integrating across the band,transmission losses predicted at individual frequencies bwide-angle parabolic equation~PE! code.7 At times duringthe experiment the source array was steered down at varangles with respect to the surface, but for the transmissof interest and the calculation, the steering angle was se0°. The sound speed profile, displayed in Fig. 3~a!, was es-
1788Harding et al.: Mid-Atlantic Ridge

ge
FIG. 1. Bathymetry and a portion of R/V CORY CHOUEST track lines~heavy black lines! in the vicinity of target B8, an elongated ridge at the western edof the figure. In this paper we analyze reverberation data from Pings at the start of runs 5a and 6 of the MAE~heavy white circles!.swptbo
heg atare
ore
sentially the same throughout the experiment and thestate was calm. The center of the source array at 181 min the upper part of the waveguide with the conjugate debeing at 3800 m and the turning range, 1/2 CZ distance,ing around 33 km. The core of the main acoustic beam c
1789 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
eaashe-n-
tains a pair of high amplitude fringes which result from tinterference between energy that was up and downgointhe source level. Behind the core, the two componentssufficiently separated in time, up to;30 ms, that there is nosignificant interference effect on the amplitude. Furtherm
TABLE I. List of reverberation records, pings, analyzed in this paper.
Run Segment Ping
Location ~Deg! Location ~UTM km!HLA array
headingLat Lon Lat Lon
5a 415 1313 26° 38.68N 247° 48.68W 2950.1 220.3 168.65a 417 1318 26° 37.48N 247° 48.18W 2947.8 221.1 166.15a 420 1327 26° 35.78N 247° 47.58W 2944.7 221.9 169.55a 421 1331 26° 35.28N 247° 47.38W 2943.7 222.3 169.15a 423 1336 26° 34.08N 247° 46.98W 2941.4 222.9 167.66 547 1683 26° 38.78N 247° 47.38W 2950.2 222.5 197.36 548 1687 26° 38.18N 247° 47.48W 2949.1 222.2 195.96 550 1692 26° 36.98N 247° 47.68W 2946.9 221.8 194.86 551 1696 26° 36.38N 247° 47.78W 2945.7 221.6 194.66 554 1705 26° 34.58N 247° 48.18W 2942.4 220.9 195.3
1789Harding et al.: Mid-Atlantic Ridge

2inn
k
ptte
ertce
as
hio
nal
/
nin
nc-ain
ftter-
ten-
ofnc-or
ex-
nttesuse
thin-
encer at
tionns-
el
ingtheandingredob-en
in this region the ray propagation angles diverge by about~Fig. 4!. Beyond the turning range, most of the structurethe main beam is due to caustics in either the up or dowgoing source field. The source field also has a numbersidelobes that intersect the seafloor at ranges less than 15
II. MIGRATION ALGORITHM
The goal of the migration algorithm is to produce a maof scattering strength registered on the same grid asbathymetry data. The basic observational data are the insity time seriesI (wb ,t) associated with beam anglewb thatresult from squaring the matched filtered and beamformpressure series. For direct, reciprocal paths between soureceiver and the scattering site, the relationship betweenexpected intensity of the backscattered signal and the stering coefficient is taken as the following integral over thseafloor
I ~wb ,t !5E E dA gm~x,u,f!g~x,wb ,wa ,t2Tr2Ts!,
~1!
where
g5gm fg rC rgsCspT2T. ~2!
Tr ,s are the ray theoretical travel times to and from the sctering location.g is the product of the transmission losseCs,r , to and from the seafloor; the gains,gs, g r , andgm f ,associated with the source array, receiver array and matcfiltering; and the source level, a product of the transmisslevel, pT , and signal duration,T. Since we are dealing withbroadband transient signals, gains for individual componeof the system are defined in terms of the ratio of integrover the input and output pressure fields8
g5E0
T0dt p0
2~ t !Y E0
Tidt pi
2~ t !. ~3!
The scattering coefficient,m(x,u,f) in Eq. ~1!, is afunction of position, x, and the monostatic incidencebackscatter direction at the seafloor~u,f!. The quantityg(x,wb ,wa ,t2Tr2Ts) can be termed the scattering functiofor the system, it depends on the details of the scatter
FIG. 2. Sketch of the source and receiver array of the R/V CORY CHOUEST.The 10 element source array had a spacing of 2.29 m while the 126 elemreceiver array had a spacing of 2.5 m.
1790 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
°
-ofm.
hen-
dce/heat-
t-,
edn
tss
g
process, as well as quadratically on the effective source fution at the seafloor and quadratically on the time domresponse of the beamformer for a given steering anglewb
and arrival anglewa at the receiver array. The partition oscattering between the scattering coefficient and the scaing function is defined by normalizingg(t) so that its timeintegral is unity.
For direct paths, Eq.~1! is a time domain variant of thestandard equation relating the expected reverberation insity to scattering coefficients for cw signals.8,9 The additionalelement in the time domain formulation is the introductiong, which can be regarded as representing the resolution fution of the acoustic imaging system. Analytic expressionsempirical forms could be found forg ~and alsom!, givenexplicit assumptions about the nature of the surface, forample small amplitude roughness.8 In practice, we assumethat the details of the time response will not be importaprovided that the resulting scattering coefficients estimarepresent averages over a sufficiently large area. We thusa simple factored boxcar form forg
g~wb ,wa ,t !5g* ~ t !b~wb ,wa!
5B~ t/tw!B~~wb2wa!/Dw!, ~4!
where isB(t) is a unit boxcar centered at zero and widone, andb(wb ,wa) is the beamformer response, which isturn simplified to a boxcar of widthDw, the angular separation between adjacent beams. In the limittw50, the timedependence,g* (t), reduces to ad-function. A potentiallymore accurate representation of the angular dependwould be to use the response function of the beamformea representative frequency rather than a boxcar.
We can derive a sonar equation from Eq.~1! by substi-tuting for the scattering function from Eq.~4!. With g* (t)set equal to ad-function, integrating fromt1 to t11Ta yields
p̄R2Ta5C rCs•gm fgsg r•pT
2T•m•A, ~5!
where
p̄R25
1
TaE
t1
t11TaI ~wb ,t ! ~6!
andA is the ensonified area corresponding to the integralimits in time and beam angle, and it is assumed that tramission losses, etc., are constant overA. This is equivalentto the following sonar equation for the reverberation levR520 logpR
R52TLr2TLs1G1M110 log~A!1S
210 log~Ta /T!, ~7!
where TLr ,s are the transmission losses,G is the combinedsystem gains,M the scattering strength, andS the sourcestrength, all defined in the obvious way from Eq.~5!. Thefinal term corrects for differences between the averagtime and the signal duration. Frequently for cw signalsaveraging time is chosen equal to the pulse durationthere is no correction. However, for the LFM pulse, choosan averaging time equal to the width of the matched filtepulse, 18 ms, corresponds to a correction of 24 dB. A prlem with choosing a short averaging time is that it is th
ent
1790Harding et al.: Mid-Atlantic Ridge

of theoingfrom
ngoing and
FIG. 3. ~a! Representative up~blue! and downgoing~red! rays paths within the main acoustics beam from a point source at 181 m, the center depthvertical source array. The reference sound speed~black! has a surface velocity of 1540 m/s and a minimum velocity of 1494 m/s at 1.1 km. The downgray paths are simple but caustics form beyond the 1/2 CZ at 30–35 km.~b! PE calculations of the transmission loss for a broadband, 200–255 Hz, sourcethe 10 element source array. Transmission loss variations near the axis of the downgoing main beam are the result of interference of the dowsurface refracted energy. Transmission loss is more variable beyond a 1/2 CZ due to the presence of caustics.
1791 1791J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998 Harding et al.: Mid-Atlantic Ridge

-er
gsino
eab
inth
,re
th
ut
heoof
sti-y con-
um
ty
ate
cering
g1,
rceimeoorure-lt
alon-inguldtiones.
bengForco-
yif
rsee
reshetrix
yseteowa
d
hard to justify the use of ad-function for the scattering function, since effectively the convolutional nature of the revberation process is being ignored.
The above result is most naturally viewed as producinscattering strength map in the local time-angle coordinatethe beamformer: The scattering strength estimate obtafrom Eq. ~7! is assigned to area A bounded by a pairisochrons and a pair of beam boundaries. We wish, instto produce a scattering strength map in terms of a glocoordinate system and thus we will use Eq.~1! to reexpressthe reverberation intensity in terms of contributions fromdividual bathymetry elements. To this end, we again usefactored form of the scattering function, Eq.~4!, and assumethat all quantities, exceptg* , associated with a small patchk, of the bathymetric grid are constant. The scatteringsponse of patchk can then be approximated as
I k~ t !5gkmkg* ~ t !*dAk
dt5gkmkGk~ t !, ~8!
where, for notational convenience, we have incorporatedbeamformer factorb(wb ,wa) into the general gain factorgk .
FIG. 4. ~a! Grazing angle of rays at a depth of 3.5 km. Arrivals are for rafrom the top, middle and bottom elements of the source array. Therapproximately a 2 ° difference in ray angle between surface reflecrefracted rays, upper cluster, and rays leaving the source traveling dward. At this depth, the penumbra of the main beam starts at 25 kmextends to about 28 km.~b! Difference in travel times at 3.5 km for up andowngoing rays at the source.
1792 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
-
aofedfd,al
-e
-
e
Here,dAk /dt is the rate at which the patch area is swept oby the isochrons; it is zero fort,Tmin,k and t.Tmax,k , theminimum and maximum travel times associated with tpatch. Convolution ofg* with the sweep rate function acts tsmoothg* , suggesting, once again, that the knowledgethe details of the scattering is not critical provided that emates are averages over large enough areas, a necessardition for which is thatTmax,k2Tmin,k@tw .
The total scattered intensity of a single beam is the sof the individual patches responses, i.e.,
I ~ t !5(k
I k~ t !5(k
gkmkGk~ t !. ~9!
The summation implicitly includes the left–right ambiguiof the receiving array through the patch weightinggk , sincethe beamformer factor is nonzero only along the conjugbeam directions. As before Eq.~9! could be explicitly aver-aged by integration over a time intervalsTa which wouldserve to stabilize the individual intensity values and reduthe size of the subsequent matrix equations. If the scattefunction is taken as ad-function, averaging yields
p̄R2~ t !Ta5(
kgkmkAkf k~ t !, ~10!
whereAk is the area of thekth patch andf k is the fraction ofthe area of thekth patch ensonified during the averagininterval. If the fractional contributions are rounded to 0 orthen Eq.~10! is equivalent to Eq.~5! of Ref. 2. In the latter,a synthetic test case was considered with the souwavetrain taken as 2-s long cw pulse and the averaging ttaken equal to the pulse length, resulting in multiple seaflpatches contributing to a single averaged intensity measment. In practical applications, though, it would be difficuto justify the use of ad-function when the duration of thesource pulse is long relative to the size of the individupatches, since implicitly, as noted above, it ignores the cvolutional nature of the reverberation process. A scatterfunction whose duration matched that of the cw pulse wobe more appropriate, but even so the structure of the funcwould potentially be important for good scattering estimat
A direct discretization of Eq.~9! for time samples att5 j Dt is
I j5(k
I jk5(k
Gjkgkmk . ~11!
Individual beam responses from multiple pings cancombined to form a single, large matrix equation relatireverberation to the scattering coefficients of the patches.the datasets considered below, the number of scatteringefficients would be;30 000, and the number of intensitsamples;20 000, a value which increases proportionatelymultiple pings are combined. However, the matrix is spasince K( j ), the number of patches illuminated at timsample,j , is on the of order 10 for a single ping.
The matrix equation could be solved as a least squaproblem with the addition of regularization constraints on tscattering coefficients, using any suitable sparse masolver such as conjugate gradients10 or LSQR,11 an approach
isd/n-
nd
1792Harding et al.: Mid-Atlantic Ridge

sec
asfathghogsarreay
t-
bs
inas
thh
ff
fi-re
u-fo
nint.-me
etebu
.ang
re-ter-ec-anden-
n-r-edif-nce
allges
ingof
s toon-the
dndther
atesnotriv-thdi-fill
ngs.ldy
ischnotitynce
ienthat
Pap
y-inal
isoni-
investigated elsewhere.5 Here we choose to solve the inverproblem approximately using a form of iterative backprojetion. The advantage of backprojection is that it is simple, fand robust, while at the same time capable of providing adegree of ambiguity resolution; we use it here to checkping-to-ping consistency of the reverberation data. Althoubackprojection does not have the potential resolution of mcomplete inversion methods, especially for multiple pinthese methods will not perform optimally unless the dataessentially consistent and we can be assured that there aunresolved problems with ship position and arrorientation.4
For a single beam, the intensity contribution assigneda patchk at time samplej by the backprojection is proportional to the weighting factor for that patch
I jk5wkI j , ~12!
where
wk5gk•Gjk
(kPK~ j !gk•Gjk. ~13!
The backprojection thus incorporates a degree of amguity resolution, assigning intensity based on such factortransmission loss to the ensonified patches and also onbasis of the area swept out, a face pointing more directlythe acoustic beam will attract proportionately highersigned intensity.
The result of the backprojection is an estimate ofscattering intensity functionI k(t) associated with each patck. An estimate of the scattering coefficient,mk , is found byintegrating the scattering intensity, Eq.~9!, and using the factthat the integral ofg* (t) is unity and thus the integral oG(t) is Ak , the area of patchk. The discrete time version othe estimate is
mk5( j I jk
gkAk, ~14!
or substituting forgk
mk51
Ak
~gm fg rC r !21( j I jk
gsCspT2T
. ~15!
This latter form shows explicitly that the scattering coefcient estimate is, as it should be, the ratio of the scatteintensity to the incident intensity, scaled by the area.
The summation over the individual intensity contribtions helps to stabilize the scattering coefficient estimateeach patch. A rough estimate of its expected variance caobtained by considering the variance of the contributingtensity values, assuming thewk are approximately constanThe time bandwidth product for the LFM pulse and 200patches is approximately 15, thus the expected variancthe sum is approximately 1 dB.12,4
If a patch is illuminated by more than one beam, ththe scattering coefficient estimate is modified appropriato become a weighted sum of the individual beam contritions,
mk51
Ak
(n( j I jkn
(nmkngkn, ~16!
1793 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
-tire,
re,eno
o
i-astheto-
e
d
rbe-
of
nly-
wheremkn is the fractional area of patchk illuminated bybeamn andgkn is the appropriate gain factor for the beam
In the examples examined later, we have employediterative form of the backprojection in which the weightinfunction in Eq.~12! is modified to
wk5gk•m̂k•Gk, j
(kPK~ j !gk•m̂k•Gk, j, ~17!
wherem̂k is the scattering coefficient estimate from the pvious iteration. The numerator is now the predicted scating intensity for each patch, and the effect of the backprojtion, when there is a mismatch between the predictedrecorded intensities, is to modify each of the assigned intsities by an equal decibel increment.
The backprojection method has similarities to the ‘‘evironmental symmetry breaking’’ approach of Ref. 3, paticularly on the first iteration when the factor controlling thassignment of energy is usually transmission loss. Theference between the two is that Ref. 3 requires the differein transmission loss to reach a threshold before assigningenergy to one side, while here assignment of energy chancontinuously as a function of the weighting factors.
The above formulation is essentially a local one, relata deterministic reverberation signal, consisting of sectionselevated intensity, to scattering produced by direct pathand from the seafloor. Local volume scattering can be csidered to be included as part of the scattering signal viascattering functiong. All other contributions to the recordereverberations, including nonlocal, multiple scattering, along-range, subseafloor refraction paths are grouped togeas noise. Forward modeling using a PE approach indicthat multipath contributions to the reverberation field aresignificant for ranges below a 1/2 CZ except as diffuse arals that fill in the noise floor. However, compact multipaarrivals do become significant in the time interval immeately beyond the direct path 1/2 CZ returns, where theywhat otherwise would be an acoustic shadow zone.13 In prin-ciple, it would be possible to incorporate multiple scatteriin the above formulation by including suitable ray pathHowever, such an approach would quickly become unwieif many paths were included, and would itself require anapriori parameterization of the scattering process, whichone of the objectives of the study. Full wave solutions, suas PE, automatically handle the multipath problem but docircumvent the need for prior parameterization. The validof the local scattering assumption and the possible influeof multipaths can be examined,a posteriori, by determiningwhether there are any regions of high scattering coefficnot associated with identifiable bathymetric features or tare not stable between migration images.
III. IMPLEMENTATION DETAILS
In implementing the migration algorithm for the SRdata, we used as the grid for the scattering coefficient mthe 200 m by 200 m swath bathymetry grid from the Hdrosweep survey. This grid size is smaller than the nomcross track resolution of the beamformed data, which;600 m at broadside at 1/2 CZ, but expressed as an ens
1793Harding et al.: Mid-Atlantic Ridge

haho
olinrcth
inath
r tpes,re
omptsonateonhencbt
s oeedtim
te, ateveyth
iesa
oinrioc
asheomoineth
k-i-e
ede
-
et
es-
c-of
fication duration, 270–380 ms, it is considerably greater tthe 18-ms duration of the compressed LFM pulse. For sucbroadband signal, the compressed pulse width yields antimistic estimate of range resolution, since the actual restion would depend strongly on the duration of the scatterresponse, including the surface reflection delay at the soureceiver. Whether the 200-m grid is large with respect toscattering function duration can be checkeda posteriori byassessing the stability of the scattering strength maps.
The quantities needed for backprojection of a given pare calculated in two stages: First relevant propagation qutities such as travel time and ray angles are found atvertices of the grid; then the sweep functionG(t) is esti-mated for each 200 by 200 m grid element, which we refehere as a patch. The spatial homogeneity of the sound sprofile during the MAE, ignoring small-scale fluctuationpermits a considerable reduction in computational effoPropagation quantities are not found directly by thredimensional ray tracing but are instead interpolated frfields calculated on regular two-dimensional, range–degrids. This simplification to a one-dimensional profile almakes it computationally feasible to use PE calculatiorather than less accurate ray theory, to estimate broadbtransmission losses. Two sets of PE results were calculaone with a ten element source array for the forward directithe other with a single element at the HLA depth for treverse direction, assuming reciprocity. The single frequeresults were then integrated across the source band to othe broadband TL estimates~cf. Fig. 3!. The effects of thefree surface reflection are included in the amplitude termthe migration via the TL calculation. However, only one sof travel times for the downgoing ray paths are calculatthus the theoretical resolution is degraded by at least thedifference in the up and downgoing ray paths,;20 ms~cf.Fig. 4!.
The properties of the individual patches are calculafrom the vertex values. The patches are assumed planartheir orientation is found by a least squares fit to the verdepths. Similarly the isochron surfaces of two-way tratime are assumed to be locally planar and are found bleast squares fit to the travel times at the vertices. Infollowing examples, we take the scattering function,g(t) tobe a d-function, and thus the sweep function,G(t) for apatch is comprised of a series of straight line segments wvertices corresponding to times when the wavefront passpatch vertex~Fig. 5!. From Fig. 5, it is evident that usingmore complex short duration function rather than ad func-tion, for example a 18-ms boxcar, would have only a mineffect on the scattering coefficient estimates after averag
Geometric shadowing calculations were performed pto migration using a mean bathymetric profile along eabeam direction. A small transition region of 300 m wadded to the edge of each ensonified region in order toprevent small numerical artifacts or local roughness frproducing shadow zones. Thus individual patches that paway from the local ray direction were considered ensofied, and it was left to the migration to determine wheththey produced small backscatter. During backprojection,scattering strengths of patches in the shadow zones were
1794 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
nap-
u-ge/e
gn-e
oed
t:-
h,
s,ndd,,
yain
ft,e
dndxlae
tha
rg.rh
lp
nti-re
ad-
justed at each iteration in order to produce an expected bacscattered intensity equal to the 10th percentile of the ensonfied patches. The purpose of this was to ensure that thpreponderance of energy would be assigned to an ensonifiarea if the conjugate side was in shadow, while at the samtime permitting energy assignment if both sides were inshadow. In this way it was possible to keep track of unexpected scattering sites in the reverberation map.
The migration algorithm was implemented primarily inMATLAB but with the sweep functions for individualpatches calculated by an external C function. The first stagof the algorithm, the calculation of propagation quantities athe vertices of the grid took 6 min of CPU, and the secondstage took 7 min per iteration on a HP 715/75 workstation~SPECINT95 3.1, SPECFP953.6!. MATLAB is an interpretedenvironment and we conservatively estimate that these timcould be reduced by a factor of 4 if the algorithm was implemented as compiled code.
IV. MIGRATION EXAMPLE FROM B 8
We take as an initial migration example, ping 1313 ofsegment 415, for which the R/V CORY CHOUESTwas located
FIG. 5. Example sweep area function for a seafloor patch. The sweep funtion consists of linear segments with joints corresponding to the passagethe beam wavefront~dash lines! past the patch vertices. For the calculationboth the patch and wavefront are assumed locally planar.~Patch area isnormalized to unit area.!
1794Harding et al.: Mid-Atlantic Ridge

turns fromn
theor the
FIG. 6. ~a! Reverberation data for ping 1313, broadband LFM transmission of s415. The displayed data spans the time interval of reverberation re1/2 CZ and beam numbers of 15–120, which avoids endfire~Beam Nos. 64/65 are the broadside beams!. To facilitate comparision with the reverberatiomaps, the data have been averaged over an interval of 270 ms and corrected for the average number of ensonified patches, a correction of211.1 dB. Theprominent returns between 30 and 45 s are a combination of returns from scarps on the front face of B8 on the starboard side of the array and ridges onport side that point almost directly into the beams.~b!, ~c! Estimated port and starboard time series after iterative migration. The split is plausible and fmost part clean, although some residual energy appears to be misplaced.
1795 1795J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998 Harding et al.: Mid-Atlantic Ridge

top of Bon the port
into account
lthoughm the scarp
FIG. 7. Two-way transmission loss for ping 1313 projected onto the port and starboard side bathymetry. Strongly ensonified features include the8on the starboard side, and the high ridges pointing approximately into the beams on the port side. The uppermost parts of the two prominent ridgesand starboard side colored white project up above the acoustic beam and are thus not included in the calculation. The current figure does not takegeometric shadowing.
FIG. 8. Reverberation map from the initial migration of ping 1313. The left–right ambiguity resolution is based primarily on ensonification level, asome dependence on local incidence angle is included via the sweep rate function. High amplitude returns due to local slope such as those froslopes of B8 are not fully resolved and also appear in the conjugate image.
1796 1796J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998 Harding et al.: Mid-Atlantic Ridge

dga
hidi
pd
apahee
fteto
vedo
n
aleamthea
erreonardth
le, a
gleingdB
rceandtionr.er-ce
ofifttere isrt
et-forde-ef-
eillthisra-an
gesnts
d in
nlyearakse a
m-be-
ispesheed,
oni-ior,ngleingbly,tiontedbe-loss
ityral
fo
en0
ion
just north and west of the center of the track star near riB8, Fig. 1, and had a HLA heading of 169°, Table I. At1/2 CZ on the starboard side is B8 with its backfacing scarpsoriented almost perpendicular to the beam directions, wat the same range on the port side, a series of N25°E trenridges point almost directly into the beam directions~Fig. 1!.The reverberation returns from these ridges and the scarB8 interfere to produce a set of crossing, high amplituevents in the data between 30 and 45 s~Fig. 6!. When weexamine the two-way transmission loss to the conjugateeas, we find that only the port side ridges and the upperof B8 are shallow enough to project into the center of tacoustics beam, although a broad platform on the port sidalso well ensonified~Fig. 7!.
Figure 8 displays the reverberation map obtained athe first iteration of the migration using data from 20 s outtimes corresponding to the 1/2 CZ turning ranges. The reberation map is an intermediate backprojection output ancalculated from the sum of the backscattered energy assated with each patch of the grid, Eq.~12!. The reverberationmap is a stable estimate in the sense that backprojectioguaranteed to be intensity preserving, and the partitionenergy between simultaneously ensonified patches isfected only by relative not absolute errors in, for examptransmission loss. From Fig. 8 we can see that the highplitude backscatter events are predominantly located wiareas that were strongly ensonified. However, a notableception is the strong scattering associated with a line of smscarps on B8 in the region~2955–2970, 205–210! UTM km,which lies well outside the main acoustic beam. Furthmore, it is reassuring that within the strongly ensonifiedgions the reverberation events tend to be localized albathymetric features with high slopes, such as the sccovering the upper parts of B8. This impression is supporteby Fig. 9, which shows that above a cutoff of about 10°
FIG. 9. Estimate of backscatter strength as a function of grazing anglethe four migration iterations of ping 1313. Iteration 1—dotted; 2—dash-d3—dashed; 4—solid. For iteration 1 there is noa priori assumption ofincreased backscatter with grazing angle, yet the mean backscatter strshows a correlation with grazing angle down to the noise floor at about 1For subsequent iterations the mean backscatter of the previous iteratused and convergence occurs in 3–4 iterations.
1797 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
e
leng
ofe
r-rt
is
r
r-isci-
isoff-,-
inx-ll
--g
ps
e
mean scattering strength increases with local grazing angdependence that arises even though thea priori assumptionis that the scattering coefficient is constant. The cutoff anof about 10° represents the point at which the scatterstrength curve reaches the noise floor, approximately 30below the maximum scattering strength. The primary souof noise is cross-talk between the beamformed channelsthus the usable dynamic range of the ARSRP reverberadata is set by the230 dB sidelobe level of the beamformeThe influence of the cross-talk noise on the ARSRP revberation data is nicely demonstrated by finite-differenmodeling studies.13
Although, the initial migration produces a fair degreeleft–right ambiguity resolution, it is clearly not perfectlocal slope is the sole or primary determinant of backscastrength. For example, energy that on the starboard sidassociated with the scarps of B8, also appears on the poside where it cuts across the mostly shallow slope bathymric fabric. We can test the degree to which slope accountsstrong backscatter by incorporating the estimated angularpendence of the scattering coefficient into the partition coficients for the backprojection, Eq.~17!. All events associ-ated with high slope features will migrate solely to thappropriate left or right image; only anomalous events wremain ambiguous and appear on both images. Fordataset, the migration effectively converged after three itetions, with only a barely perceptible change in the mebackscatter coefficient between iterations 3 and 4~Fig. 9!.The perceived ambiguity in the backscattered energy imais significantly reduced and only a few small isolated eveappear split between the two images~Fig. 10!. The effective-ness of the ambiguity resolution is more readily assessethe original time-beam coordinates~Fig. 6!. For the most partthis view confirms the impression that the energy is cleasplit between the left and right side. However, energy nthe edges of some prominent reverberation events lethrough to the other side, suggesting that there may bslight error in the array orientation or that the migrated iage could be improved by incorporating some cross talktween beams in the beamformer factorb, Eq. ~4!.
The scattering strength map for the fourth iterationdisplayed in Fig. 11. As expected the elongated scarp sloon B8 are highlighted in the image, but compared to tenergy image, the prominence of the port ridges is reductheir previous prominence being due solely to strong ensfication. As was to be expected from the mean behavthere is an overall correspondence between the grazing aand scattering strength with the normalization emphasizthe scattering strength of the lower slopes. Also, predictathe scattering strength map is noisier than the reverberaone, since now global as well as local errors in estimaquantities are important. For example, any mismatchtween the predicted and actual pattern of transmissionwill be reflected in the scattering strength map.
V. COMPOSITE IMAGES OF B 8
We can assess the validity of the single ping ambiguresolution and simultaneously gain insight into the gene
ort;
gth°.is
1797Harding et al.: Mid-Atlantic Ridge

, with a
f thes
FIG. 10. Reverberation map of ping 1313 after four iterations. Compared to iteration 1, the left–right ambiguity resolution is significantly improvedmuch weaker ghosting of the B8 scarps in the port side image.
FIG. 11. Scattering strength maps derived from the reverberation map~Fig. 10! by correcting for transmission loss, area, etc. The previous prominence otop of B8 and the port side ridges is revealed as primarily a consequence of high ensonification levels, while the B8 scarp slopes are identified clearly aregions of high backscatter.
1798 1798J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998 Harding et al.: Mid-Atlantic Ridge

mthae
omafugiv
ot
th
antb
ntng
ite
teoma
pee
-
6werlo-is
geses-run
o-
esathscat-
d atue,all
tighin
k-the
tterelyport
ionngthsls abyingter-
rape
les.ngm-of
maliven
a
there
the
m-mallsplitthe
at
wilt
era-
quality of the data by comparing the migration results fromultiple ensonifications of the same target with nearlysame ship location but different headings. The standmeans of obtaining multiple looks at a target is to use revberation records from crossing paths and this we do by cparing images from runs 5a and 6 of the MAE which crossan angle of approximately 25°. But we can also gain useinformation from multiple pings from a single run, takinadvantage of small changes in the heading of the recearray between pings. If a reverberation event is migratedits true origin on the seafloor, then its location will nchange when the array heading changes byu. Conversely afalse scatterer that resulted from migrating energy towrong side of the array will rotate through 2u since it islocated at the mirror image of true scatterer in the array~Fig.12!. Thus the incorrectly migrated energy will move inpredictable fashion in step with the changes in array orietion. This movement can most readily be appreciatedcombining the migration results from successive pings ian animation sequence. For the five consecutive LFM pifrom run 5a considered here, the maximum differencearray heading is 3° which is sufficient to move false scaters across 3–4 beams in the migrated image.
We have investigated the consistency of the migraimages using five consecutive broadband LFM pings frboth run 5a and run 6 spanning their intersection26°368N, 247°478W @~2946, 222!, Fig. 1#. Figure 13 dis-plays the scattering strength maps for the northern foresloof B8 for nine of the pings. Perhaps the most striking aspof the images is that relatively narrow scarp slopes app
FIG. 12. With incomplete ambiguity resolution, energy from a scattereralso be migrated to a false scatterer location; that is, the mirror image inline array of the true location. These locations will remain paired for diffent pings~black circles! if the ship heading remains constant, but the loction of the false scatterer will rotate through 2Q when the array headingchanges byQ.
1799 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
erdr--tl
erto
e
a-yos
nr-
d
t
esctar
consistently, with only relatively minor ping-to-ping variation in strength and location. The images from run 6~pings1683–1696! are cleaner than the ones from run 5a~pings1313–1336! due to the fact that the conjugate area on runis the source of much less backscatter. For run 5a, the loportion of the images below 2950 includes residual miscated energy from the port side ridges. A port side originsupported by the fact that it does not appear in the imafrom run 6 and that its location moves between the succsive run 5a images. Similarly energy that appears in the5a images near the center of a small basin at~2960, 202! canalso be attributed to a partial failing of the ambiguity reslution.
Averaging the individual images effectively suppressfalse scatterers attributable to energy leakage and multipand emphasizes the consistency of direct path, high backster from the narrow ridges~Fig. 14!. All the high backscatterregions correspond to scarp features that are ensonifiehigh local grazing angles. However, the converse is not trthere are features, most notably the front edge of a smplatform centered~2955, 198! that although illuminated ahigh angle does not produce high backscatter. Spots of hbackscatter do appear along the front edge of the platformthe individual migration images, perhaps indicative of bacscatter speckle that fluctuates in response to changes inensonification. However, since the strongest backscaevents appear in the noisier run 5a images it is more likthat the high ensonification angles succeed in capturingside energy during migration.
For each of the ten pings, we have used the migratresults to estimate the variation of mean backscatter strewith grazing angle~Fig. 15!. The backscatter curve wafound using the Loess algorithm,14 assuming that the locagrazing angles were correct. The Loess algorithm findpoint on the backscatter curve for a given grazing anglefitting a line to a subset of the data centered on the grazangle using weighted least squares. Formal confidence invals for the mean were estimated from 200 bootstsamples15 for each ping, and were typically 1–2 dB at th95% confidence level, increasing at high grazing angOver the interval from 10° to 45°, the mean scatteristrength curves for run 5a are roughly comparable to a Labert’s law type behavior with a Mackenzie parameter227 dB, although the curves are distinct based on the forconfidence intervals. The backscatter estimates for a ggrazing angle are distributed approximately normally withstandard deviation of 4–5 dB~Fig. 16!.
The split is probably a consequence of differences indistribution of the relatively small number of patches that aensonified at high grazing angles. For run 5a, 73% of700–900 patches ensonified at angles greater than 25°~ap-proximately 3% of the total! come from the B8 scarps, whilefor run 6, this percentage drops to 63% with a greater nuber of high angle targets on the starboard side that are sand relatively isolated. When the backscatter curves areinto port and starboard contributions, the gap betweenstarboard side curves that includes B8 is reduced, althoughnot eliminated. Moreover, the port side targets displayweaker dependence on angle~Fig. 17! and are consisten
lhe-
1799Harding et al.: Mid-Atlantic Ridge

pingsof a small
te area.
FIG. 13. Scattering coefficient maps of a subarea of the B8 abyssal hill for 5 consecutive broadband LFM pings of run 5a, 1313–1336, and 4 consecutivefor run 6, 1683–1696. Most of the scarp slopes in the area show up consistently as regions of high backscatter. A notable exception is the edgeplatform near~2955, 200! which is only intermittently highlighted possibly only as the result of being mistakenly assigned energy from the conjuga
1800 1800J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998 Harding et al.: Mid-Atlantic Ridge

ght panel,ets and localmost notably
FIG. 14. Comparison of the mean backscatter strength, left panel, found by stacking the ten migrated pings, with the mean illumination angle, riexpressed in terms of the cosine of the local grazing angle. For the most part, there is a close correspondence between high backscatter targgrazing angle: all prominent backscatter targets correspond to scarp features ensonified at high grazing angles. However, there are some features,the front slope of a small platform centered~2955, 198! that, although illuminated at high angle, does not produce a high backscatter.
avecetrariaug
etes
ersmune
f tra
theat
sea-thetlyf theg
e.ingtheveneri-gthase.retry
f in-mtheve-that
le-as-
over the two runs. The difference in scattering strength mindeed reflect an intrinsic difference in the backscatter lebetween the areas. However, it may also be a consequenprocessing artifacts and of the limitations of the bathymedatabase. The size of the port side targets tend to be nebelow the angular resolution of the system, and thus thetrinsic averaging of the beamforming coupled with any smerrors in the heading calculations will tend to mute the inflence of high angle patches. Also the number of high antargets is small enough that imperfections in the bathymdatabase such as small noise spikes that produce erronhigh angle targets would bias the scattering strength emates downward.
VI. CONCLUSIONS
We have developed an algorithm for migrating revberation data that is based upon time-domain expressionthe expected intensity of the reverberation field. The tidependent aspects of the field are parameterized by a ftion referred to as the scattering function, which includboth stochastic components dependent on the details oseafloor scattering and deterministic ones due to the cha
1801 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
ylof
yor
n-ll-leryousti-
-forec-
shec-
teristics of the acoustic imaging system. We argue thatdetails of the scattering function are not critical provided thscattering coefficients are estimated over patches of thefloor with response times that are long compared withcharacteristic time of the scattering function, or equivalenwhose area is large compared to the correlation scales oscattering process.9 This approach is comparable to reducinspeckle in optics by averaging over a scanning apertur16
Time averaging has the additional advantage of producstable estimates from individual reverberation records,trade-off is that spatial resolution is reduced. However, ewith averaging, the broadband LFM pulse of the SRP expments is capable of yielding consistent scattering strenestimates at the resolution of the main bathymetry datab
A key feature of the algorithm is that the results acomputed in the global coordinate system of the bathymedatabase rather than the beam-travel time coordinates odividual pings, facilitating the comparison of results fromultiple pings. The basis for the coordinate conversion isprecise, sample-by-sample, tracking of the acoustic wafronts across the individual patches and the assumptionthe scattering coefficient is constant within individual ements, patches, of the bathymetry database. These two
1801Harding et al.: Mid-Atlantic Ridge

nfun
atre
f
raeeilaaosit
-ti
nlero
el
e
o
e
ean85
e tenhed.
n run
sumptions allow us to reexpress the reverberation respoas a large sparse matrix equation with the scattering coecients as the unknowns. The matrix formulation enables mtiple records to be combined simply into a single linear iversion problem.
In this paper we have taken a processing orientedproach taking advantage of the sparsity to solve the maequation approximately using iterative backprojection raththan attempting to solve the equation directly as part olinear inversion. We describe this process as migration sinthe method is analogous to the Kirchoff migration proceduof seismic processing, the principal difference being thhere it is applied to incoherent scattering rather than coherreflections. It has the processing virtue of producing revberation and scattering coefficient maps rapidly thus factating efficient analysis of multiple records. The reverbertion maps, which are produced by backprojection asintermediate output, represent an exact partition of the recintensity and are thus guaranteed to be stable and allow uassess directly the effectiveness of the left–right ambiguresolution.
The performance of the migration algorithm is illustrated using two sets of broadband monostatic reverberarecords from a pair of crossing runs of the SRP experimeon the flanks of the Mid-Atlantic ridge. At a 1/2 CZ, iterativemigration produces well resolved maps of reverberation ascattering strength. In the reverberation maps, there is a ccorrespondence between the location of high amplitudeverberation events and bathymetric features with either ltransmission loss, high local grazing angle or both. In paticular, narrow scarps less than 1 km wide are highlightconsistently. The migration also produces a plausible resotion of the left–right ambiguity, dividing the majority ofevents in a reverberation record cleanly between the twosonified areas. The migration algorithm can be regarded
FIG. 15. Estimate of scattering strength versus grazing angle for pings frrun 5a~solid! and run 6~dashed! with bootstrap estimates of62 s errors inthe mean. For reference, Lamberts law curve using a Mackenzie paramof 227 dB is included, dotted curve.
1802 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
sefi-l--
p-ixraceetntr-i--nrdtoy
onnt
dar
e-wr-du-
n-as
m
ter
FIG. 16. Representative histogram of scattering strength relative to mtrend from ping 1313 for a bin extending from 21° to 29°. There are 13patches in the bin. The distribution is approximately gaussian withs54.4 dB.
FIG. 17. Port and starboard estimates of mean scattering strength for thpings. Estimates from run 5a are solid lines and those from run 6 are dasThe estimates from the starboard side that ensonify B8 show a consistentlystronger dependence on grazing angle and there is less of a gap betwee5a and 6 estimates.
1802Harding et al.: Mid-Atlantic Ridge

egh-
veb
er
ndss,lyga
llydthistuarul
mnf
ea
anretn
inu
enre
ateif
i-e
ucaknngur
ens
cto
inencethe
y issso-he
y,
arlye,/Vlsota
ketful
A,
J.
id-
n
ge,
ralns.
n
d
-
ear
oc.
er scat-ch-
ing
-
ly-oc.
eep
an environmental symmetry breaking method that uses sloor induced asymmetries to resolve the inherent left–riambiguity of the receiving array. Although the migration images are by no means unique, the improvement of the eseparation with iteration and the clear correspondencetween events and bathymetric features provides stronga pos-teriori justification for the inclusion of mean backscattstrength as a factor in the backprojection weights.
The results of multiple migrations from a single run afrom crossing runs corroborates the overall effectivenesthe left–right ambiguity resolution for individual recordand supports the idea that scattering strength is primarifunction of grazing angle. The majority of high scatterinstrengths areas, primarily associated with scarp slopes,pear consistently in all migration images. A few potentiaanomalous areas move in step with changes in array heawithin a single run and tend to be absent in images fromcrossing run. These areas are identified as energy msigned to the wrong side of the array, and are attenuawhen multiple maps are stacked together. Employing mtiple heading directions from crossing runs is the standmeans of reducing left–right ambiguity. The present resdemonstrate that even small heading changes~e.g., 2°–3°!from a single run can be profitably employed to reduce abiguity. The consistency of the migration images demostrates the stability of the acoustic imaging system usedthe SRP experiments and is a good indication that lininversion could be applied successfully to the data.
The migration results indicate that transmission lossgrazing angle are the dominant factors controlling reverbetion response in the study area. A dependence, in the mof backscatter strength on grazing angle appears afterfirst iteration of the migration when the backprojectioweights contain no bias toward patches with high grazangles. We thus conclude, as have previoinvestigators,3,8,17 that the correlation, in the mean, betwebackscatter strength and grazing angle is a robust featuthe data.
Weaker dependencies of scattering strength on spand azimuthal variations in scattering strength were notplicitly sought for in the present analysis. However, the dference in the mean scattering curves between B8 and theconjugate sides~Fig. 17! indicate that there may be an azmuthal dependence resolvable in the data. The prominridges of B8 are ensonified almost perpendicular to the strtural grain, whereas the starboard side ridges with the webackscatter are ensonified parallel to the grain. Resolutioquestions such as azimuthal dependence of backscatterithe influence of sediments on backscattering will require fther, more detailed analysis of the data.
Above a noise floor of about 5°, the estimated depdence of the mean scattering strength on grazing angleapproximately equal to, but formally statistically distinfrom, that of Lambert’s law with a Mackenzie parameter
1803 J. Acoust. Soc. Am., Vol. 103, No. 4, April 1998
af-t
nte-
of
a
p-
inge
as-edl-d
ts
--orr
da-an,he
gs
of
ialx--
nt-erofor
-
-is
f
227 dB. Although the general magnitude of the increasebackscatter strength appears robust, the detailed dependon grazing angle must be treated with some caution asaccuracy of the slopes derived from the swath bathymetritself questionable, especially when the high slopes are aciated with smaller features near the resolution limit of tsystem.18
ACKNOWLEDGMENTS
We wish to thank Art Baggeroer, the scientific partand the crew of the CORY CHOUEST for their efforts in col-lecting the data on the SRP acoustics experiment. Similwe wish to acknowledge the efforts of Brian TucholkMarty Kleinrock, the science party, and crew of the REWING in collecting the bathymetry database. We would alike to thank Paul Henkart for maintaining the SRP daarchive and ensuring its accessibility. Finally we would lito thank Kevin Smith and Johan Robertsson for thoughreviews of the original manuscript.
1Acoustic Reverberation Special Research Program, Initial Report, editedby J. A. Orcutt ~Scripps Institution of Oceanography, San Diego, C1993!.
2N. C. Makris, ‘‘Imaging ocean-basin reverberation via inversion,’’Acoust. Soc. Am.94, 983–993~1993!.
3N. C. Makris and J. M. Berkson, ‘‘Long-range backscatter from the MAtlantic ridge,’’ J. Acoust. Soc. Am.95, 1865–1881~1994!.
4N. C. Makris, L. Z. Avelino, and R. Menis, ‘‘Deterministic reverberatiofrom ocean ridges,’’ J. Acoust. Soc. Am.97, 3547–3574~1995!.
5J. C. Van Decar and R. Snieder, ‘‘Obtaining smooth solutions to larlinear, inverse problems,’’ Geophysics59, 818–829~1994!.
6B. E. Tucholke, K. C. Macdonald, and P. J. Fox, ‘‘ONR seafloor natulaboratories on slow- and fast-spreading Mid-Ocean ridges,’’ EOS TraAm. Geophys. Union72, 268–270~1991!.
7M. D. Collins, ‘‘A split-step Pade solution for the parabolic equatiomethod,’’ J. Acoust. Soc. Am.93, 1736–1742~1993!.
8C. S. Clay and H. Medwin,Acoustical Oceanography: Principles anApplications~Wiley, New York, 1977!.
9L. M. Brekhovskikh and Y. P. Lysanov,Fundamentals of Ocean Acoustics ~Springer-Verlag, New York, 1991!, 2nd ed.
10G. H. Golub and C. F. Van Loan,Matrix Computations~Johns HopkinsUniv., Baltimore, 1989!, 2nd ed.
11C. C. Paige and M. A. Saunders, ‘‘LSQR: An algorithm for sparse linequations and sparse least squares,’’ ACM Trans. Math. Softw.8, 43–72~1982!.
12I. Dyer, ‘‘Statistics of sound propagation in the ocean,’’ J. Acoust. SAm. 48, 337–345~1970!.
13J. O. A. Robertson, A. Levander, and K. Holliger, ‘‘Modeling of thacoustic reverberation special research program deep oceanseaflootering experiments using a hybrid wave propagation simulationtenique,’’ J. Geophys. Res.101, 3085–3101~1996!.
14W. S. Cleveland, ‘‘Robust Locally Weighted Regression and SmoothScatter Plots,’’ J. Am. Stat. Assoc.74, 829–836~1979!.
15B. Efron and R. J. Tibshirani,An Introduction to the Bootstrap~Chapman& Hall, New York, 1993!.
16B. R. Frieden,Probability, Statistical Optics, and Data Testing: A Problem Solving Approach~Springer-Verlag, New York, 1991!, 2nd ed.
17K. B. Smith, W. S. Hodgkiss, and F. D. Tappert, ‘‘Propagation and anasis issues in the prediction of long-range reverberation,’’ J. Acoust. SAm. 99, 1387–404~1996!.
18M. C. Kleinrock, ‘‘Capabilities of some systems used to survey the dsea floor,’’ in CRC Handbook of Geophysical Exploration at Sea, editedby R. A. Geyer~CRC, Boca Raton, 1992!, 2nd ed.
1803Harding et al.: Mid-Atlantic Ridge