Embed Size (px)
Citation preview
Motion Reconstruction of Vortex-Induced
Vibration of Long Flexible Riser from
Experimental and Field Test Data
Ming Li
Ma
ste
r of
Scie
nce T
he
sis

Motion Reconstruction of Vortex-
Induced Vibration of Long Flexible
Riser from Experimental and Field
Test Data
MASTER OF SCIENCE THESIS
For the degree of Master of Science in Offshore and Dredging
Engineering at Delft University of Technology
Ming Li
July 22, 2016
Faculty of Mechanical, Maritime and Materials Engineering • Delft University of
Technology

The work in this thesis was supported by Delft University of Technology
Copyright ○c Delft University of Technology
All rights reserved.
DELFT UNIVERSITY OF TECHNOLOGY
DEPARTMENT OF
OFFSHORE AND ENGINEERING
The undersigned hereby certify that they have read and recommend to the Faculty of
Mechanical, Maritime and Materials Engineering of acceptance of a thesis entitled
MOTION RECONSTRUCTION OF VORTEX-INDUCED VIBRATION OF LONG
FLEXIBLE RISER FROM EXPERIMENTAL AND FIELD TEST DATA
By
MING LI
in partial fulfillment of the requirements for the degree of
MASTER OF SCIENCE
OFFSHORE AND DREDGING ENGINEERING
Dated: July 22, 2016
Chairman of Graduation Committee: Prof. Dr. A. V. Metrikine
University Supervisor: Dr. Y. Qu
University Supervisor: Dr. F. Pisano
University Supervisor: Dr. D. Fallais


Abstract
Vortex-induced vibration (VIV) of long flexible cylindrical structures enduring ocean
currents is ubiquitous in the offshore industry. Though significant effort has gone into
understanding this complicated fluid-structure interaction problem, major challenges
remain in modelling and predicting the response of such structures. The work presented
in this thesis applies the modal approach to do reconstruction of the riser VIV motion
from experimental data at first and then performs some analyses to the riser VIV
response based on the reconstructed result.
In the first part of the thesis, the modal approach is classified into frequency domain
method and time domain method according to the types of the measurement data. Two
systematic frameworks to do motion reconstruction are built for these two methods.
Besides, two factors probably leading to the reconstruction error are proposed. One is
using the strain measurement to identify the low modes VIV motion and the other one is
unreasonable choice of participating modes.
In the second part of the thesis, the riser VIV motion in ExxonMobil VIV test is
reconstructed using the frequency domain method and that in the second Gulf Stream
VIV test is reconstructed using the time domain method. In the reconstruction process,
several problems are needed to be solved, such as the choice of time window, filtering
data and the choice of participating modes. And the accuracy of the reconstructed result
is verified using the extraction method. Finally, two examples are given to demonstrate
the reconstruction errors induced by the above two facors.
In the final part of the thesis, some key parameters are extracted out to show the
effects of external conditions, e.g. current profile, current speed and strake coverage, on
the VIV displacement magnitude and response frequency of the riser. Besides, three
methods are provided to identify the travelling wave in the riser VIV response.


Acknowledgement
I owe the successful completion of this thesis to several people involved in the
whole process.
At first, I would like to express my sincere gratefulness to Yang Qu, my university
daily supervisor. His feedback provided me with the guidance that I needed to study.
Also, I am grateful for our cooperation during the whole period of the graduation study
and the fact that he was always available for questions and discussion.
Moreover, I would like to thank the chairman of my graduation committee, Professor
Andrei Metrikine, for his guidance and remarks during this graduation study. His valuable
advice and especially his to-the-point questions helped me to understand the physics of
this problem deeply.
Finally, I would like to thank my friends and family for their encouragement, patience
and mental support.

Contents
1
Contents
List of Figures ............................................................................................................... 6
List of Tables ............................................................................................................... 12
Nomenclature .............................................................................................................. 14
1 Introduction ............................................................................................................. 16
1.1 Background ........................................................................................................ 16
1.2 Vortex-Induced Vibration .................................................................................... 17
1.2.1 Vortex-shedding ....................................................................................... 17
1.2.2 Lock in ...................................................................................................... 18
1.2.3 Influencing parameters ............................................................................. 19
1.3 Studies on VIV of riser ........................................................................................ 21
1.3.1 Experimental studies ................................................................................ 22
1.3.2 Semi-Empirical VIV Response Computational Tools ................................ 23
1.3.3 Numerical Simulation ................................................................................ 24
1.4 Research objectives............................................................................................ 24
1.5 Thesis outline...................................................................................................... 25
2 Approach to riser VIV response reconstruction ................................................... 26
2.1 Problem statement .............................................................................................. 26
2.2 Reconstruction approach .................................................................................... 27
2.2.1 Modal approach ........................................................................................ 27
2.2.2 Theoretical basis for modal approach ....................................................... 28
2.2.3 Limitations of modal approach .................................................................. 28
Contents
2
2.3 Modal approach description ................................................................................ 29
2.3.1 Frequency domain method ....................................................................... 30
2.3.2 Time domain method ................................................................................ 33
2.4 Identifiably and error analysis ............................................................................. 34
2.4.1 Identifiably analysis .................................................................................. 34
2.4.2 Error analysis of noise on strain measurement ......................................... 35
2.4.3 Error analysis of unreasonable choice of participating modes .................. 36
3 The ExxonMobil and second Gulf Stream VIV tests ............................................. 38
3.1 Introduction ......................................................................................................... 38
3.2 ExxonMobil VIV test ............................................................................................ 38
3.2.1 Background .............................................................................................. 38
3.2.2 Riser model .............................................................................................. 39
3.2.3 Test rig ..................................................................................................... 40
3.2.4 Instrumentation and data acquisition ........................................................ 41
3.3 The second Gulf Stream VIV test ........................................................................ 44
3.3.1 Background .............................................................................................. 44
3.3.2 Experiment set-up .................................................................................... 44
3.3.3 Pipe model ............................................................................................... 45
3.3.4 Measurement system ............................................................................... 47
4 Riser VIV response reconstruction of ExxonMobil VIV test ................................. 50
4.1 Choice of response reconstruction approach ...................................................... 50
4.2 Response reconstruction steps ........................................................................... 50
4.2.1 Choice of time window .............................................................................. 50
4.2.2 Preparation of data matrix b .................................................................... 51
4.2.3 Preparation of system matrix A ............................................................... 55
4.2.4 Obtaining the modal weights matrix w ..................................................... 59
4.2.5 Results ..................................................................................................... 60
Contents
3
4.3 Verification of the accuracy of reconstructed results ........................................... 63
4.4 Example of error from noise on strain measurement ........................................... 65
4.5 Results summary ................................................................................................ 67
4.5.1 Bare riser response .................................................................................. 67
4.5.2 50% straked riser response ...................................................................... 69
4.5.3 Fully straked riser response ...................................................................... 71
5 Analyses to reconstructed VIV responses in ExxonMobil VIV test ..................... 74
5.1 Riser VIV modal decomposition .......................................................................... 74
5.1.1 Response modes and response frequencies ............................................ 74
5.1.2 Numerical method .................................................................................... 75
5.1.3 Application to ExxonMobil VIV test and discussion ................................... 76
5.2 Travelling waves in riser VIV response ............................................................... 79
5.2.1 Uniform flow ............................................................................................. 79
5.2.2 Linearly sheared flow ................................................................................ 80
5.3 Key parameters analyses ................................................................................... 80
5.3.1 Bare riser .................................................................................................. 81
5.3.2 50% straked riser ..................................................................................... 86
5.3.3 Fully straked riser ..................................................................................... 90
5.3.4 Conclusions .............................................................................................. 94
6 Riser VIV response reconstruction of the second Gulf Stream VIV test ............. 96
6.1 Characteristics of the second Gulf Stream VIV test ............................................. 96
6.1.1 Characteristics of tested pipe ................................................................... 96
6.1.2 Characteristics of measured data ............................................................. 98
6.2 Data preprocessing ........................................................................................... 100
6.2.1 Unwrapping data .................................................................................... 100
6.2.2 Choice of time window ............................................................................ 102
6.2.3 Bandpass filter data ................................................................................ 103

Contents
4
6.2.4 Decompose filtered data ......................................................................... 104
6.3 Preparation of data matrix C ........................................................................... 106
6.4 Preparation of system matrix ....................................................................... 106
6.5 Reconstructed result ......................................................................................... 108
6.6 Verification of the accuracy of reconstructed result ........................................... 108
6.7 Examples of error from choice of participating modes ....................................... 110
6.8 Peak response mode ........................................................................................ 112
6.9 Travelling wave in riser VIV response ............................................................... 114
7 Conclusions ........................................................................................................... 116
7.1 Summary of contributions from each chapter .................................................... 116
7.1.1 Riser VIV response reconstruction method ............................................. 116
7.1.2 Description of two objective VIV tests ..................................................... 117
7.1.3 Response reconstruction using experimental data ................................. 117
7.1.4 Analyses to the reconstructed VIV response .......................................... 118
7.2 Recommendations for future research .............................................................. 119
Bibliography .............................................................................................................. 120
A Fairing and strake configurations ....................................................................... 124
B Chosen parameters for bare riser cases in ExxonMobil VIV test ...................... 126
C Power spectral density (PSD) of reconstructed displacement signals ............. 128
D Rotation angles ..................................................................................................... 134
List of Figures
6
List of Figures
Figure 1.1:Principle sketch of a riser system ............................................................... 17
Figure 1.2:Von Karman Vortex Street ......................................................................... 18
Figure 1.3: The relationship of Strouhal number and Reynolds number ....................... 20
Figure 1.4: The variation of added mass coefficient with reduced velocity and different
normalised vibration amplitude values......................................................... 21
Figure 2.1: Flow chart of frequency domain method for riser VIV response reconstruction
.................................................................................................................... 32
Figure 2.2: Flow chart of time domain method for riser VIV response reconstruction ..... 34
Figure 2.3: The first three mode-shapes of displacement and curvature........................ 35
Figure 3.1: Photography of helical strakes installed on the riser model ......................... 40
Figure 3.2: Sketch of rotating test rig used for ExxonMobil VIV test ............................... 41
Figure 3.3: Accelerometers and strain gauges mounted on riser model ........................ 42
Figure 3.4: Strain gauge and accelerometer placement on the riser model ................... 42
Figure 3.5: Overview sketch of instrument placement ................................................... 43
Figure 3.6:Experiment set-up for the second Gulf Stream VIV test ............................. 45
Figure 3.7: Photographs of : (a) Triple helical strake (b) Fairing .................................... 46
Figure 3.8:Cross-section of the Pipe from the Gulf Stream Test ................................. 48
Figure 3.9: Side View of the Pipe from the Gulf Stream Test ......................................... 48
Figure 4.1: The variation of current speed with time for test 1113.................................. 51
Figure 4.2: The derived cross-flow displacement amplitute spectrum of the point where
sensor Acc_CF16 locates for case 1113 ..................................................... 53
List of Figures
7
Figure 4.3: The derived in-line displacement amplitute spectrum of the point where
sensor Acc_IL16 locates for case 1113 ....................................................... 53
Figure 4.4: The derived cross-flow displacement amplitute spectrum of the point where
sensor Acc_CF08 locates for case 1217 ..................................................... 54
Figure 4.5: The derived in-line displacement amplitute spectrum of the point where
sensor Acc_IL08 locates for case 1217 ....................................................... 54
Figure 4.6: The natural frequencies of riser in still water under constant tension of 700N
as a function of mode number ..................................................................... 56
Figure 4.7: Error of estimates of modal weights assuming uncorrelated noise of unit
variance on all curvature measurements ..................................................... 58
Figure 4.8: Normalized RMS modal weights for case 1113 ........................................... 59
Figure 4.9: Normalized RMS modal weights for case 1217 ........................................... 60
Figure 4.10: The comparison of the RMS of the original (at accelerometer locations) and
reconstructed CF displacements for case 1113 ........................................... 61
Figure 4.11: The comparison of the RMS of the original (at accelerometerlocations) and
reconstructed IL displacements for case 1113 ............................................ 61
Figure 4.12: The comparison of the RMS of the original (at accelerometer locations) and
reconstructed CF displacements for case 1217 ........................................... 62
Figure 4.13: The comparison of the RMS of the original (at accelerometer locations) and
reconstructed IL displacements for case 1217 ............................................ 62
Figure 4.14: The comparison of reconstructed and measured RMS CF displacements at
the position where the target accelerometer locates for case 1113 ............. 63
Figure 4.15: The comparison of reconstructed and measured RMS IL displacements at
the position where the target accelerometer locates for case 1113 ............. 64
Figure 4.16: The comparison of reconstructed and measured RMS CF displacements at
the position where the target accelerometer locates for case 1217 ............. 64
Figure 4.17: The comparison of reconstructed and measured RMS IL displacements at
the position where the target accelerometer locates for case 1217 ............. 65
Figure 4.18: The comparison of the RMS of the reconstructed IL displacements from
modified system matrix and original system matrix for case 1217 ............... 66
Figure 4.19: The comparison of modified and original normalized RMS modal weights for
in-line VIV response in case 1217 ............................................................... 66
Figure 4.20: The RMS of riser CF displacements for bare riser and uniform flow cases 67
Figure 4.21: The RMS of riser IL displacements for bare riser and uniform flow cases .. 68
List of Figures
8
Figure 4.22: The RMS of riser CF displacements for bare riser and sheared flow cases
.................................................................................................................... 68
Figure 4.23: The RMS of riser IL displacements for bare riser and sheared flow cases . 69
Figure 4.24: The RMS of riser CF displacements for 50% straked riser and uniform flow
cases .......................................................................................................... 69
Figure 4.25: The RMS of riser IL displacements for 50% straked riser and uniform flow
cases .......................................................................................................... 70
Figure 4.26: The RMS of riser CF displacements for 50% straked riser and sheared flow
cases .......................................................................................................... 70
Figure 4.27: The RMS of riser IL displacements for 50% straked riser and sheared flow
cases .......................................................................................................... 71
Figure 4.28: The RMS of riser CF displacements for fully straked riser and uniform flow
cases .......................................................................................................... 71
Figure 4.29: The RMS of riser IL displacements for fully straked riser and uniform flow
cases .......................................................................................................... 72
Figure 4.30: The RMS of riser CF displacements for fully straked riser and sheared flow
cases .......................................................................................................... 72
Figure 4.31: The RMS of riser IL displacements for fully straked riser and sheared flow
cases .......................................................................................................... 73
Figure 5.1: The peak response modal magnitude for the dominate cross-flow peak
response frequency (9.86 Hz) in test 1113 .................................................. 77
Figure 5.2: The peak response modal phase angle for the dominate cross-flow peak
response frequency (9.86 Hz) in test 1113 .................................................. 77
Figure 5.3: The peak response modal magnitude for the dominate cross-flow peak
response frequency (8.50 Hz) in test 1217 .................................................. 78
Figure 5.4: The peak response modal phase angle for the dominate cross-flow peak
response frequency (8.50 Hz) in test 1217 .................................................. 78
Figure 5.5: The contour plot of a two-second-long reconstructed CF displacement time
series for test 1113. ..................................................................................... 79
Figure 5.6: The contour plot of a two-second-long reconstructed CF displacement time
series for test 1217. ..................................................................................... 80
Figure 5.7: The spatial mean RMS CF and IL displacements for bare riser and uniform
flow cases ................................................................................................... 82
List of Figures
9
Figure 5.8: The spatial mean RMS CF and IL displacements for bare riser and sheared
flow cases ................................................................................................... 82
Figure 5.9: Dominant frequencies for bare riser and uniform flow cases........................ 83
Figure 5.10: Dominant frequencies for bare riser and sheared flow cases ..................... 84
Figure 5.11: Dominant mode with respect to displacement for bare riser and uniform flow
cases .......................................................................................................... 85
Figure 5.12: Dominant mode with respect to displacement for bare riser and sheared
flow cases ................................................................................................... 85
Figure 5.13: The spatial mean RMS CF and IL displacements for 50% straked riser and
uniform flow cases ...................................................................................... 86
Figure 5.14: The spatial mean RMS CF and IL displacements for 50% straked riser and
sheared flow cases ..................................................................................... 87
Figure 5.15: Dominant frequencies for 50% straked riser and uniform flow cases ......... 88
Figure 5.16: Dominant frequencies for 50% straked riser and sheared flow cases ........ 89
Figure 5.17: Dominant mode with respect to displacement for 50% straked riser and
uniform flow cases ...................................................................................... 90
Figure 5.18: Dominant mode with respect to displacement for 50% straked riser and
sheared flow cases ..................................................................................... 90
Figure 5.19: The spatial mean RMS CF and IL displacements for fully straked riser and
uniform flow cases ...................................................................................... 91
Figure 5.20: The spatial mean RMS CF and IL displacements for fully straked riser and
sheared flow cases ..................................................................................... 91
Figure 5.21: Dominant frequencies for fully straked riser and uniform flow cases .......... 92
Figure 5.22: Dominant frequencies for fully straked riser and sheared flow case ........... 93
Figure 5.23:Dominant mode with respect to displacement for fully straked riser and
uniform flow cases ...................................................................................... 94
Figure 5.24: Dominant mode with respect to displacement for fully straked riser and
sheared flow cases ..................................................................................... 94
Figure 6.1: Bottom end (railroad wheel) depth below the free surface of the water versus
top end angle of inclination with vertical for all cases .................................. 97
Figure 6.2: The natural frequencies of the pipe in still water under constant tension of
810 lb as a function of mode number .......................................................... 98
Figure 6.3: (a) the deflected shape of the pipe (b) normal incidence current profile ....... 99
List of Figures
10
Figure 6.4: RMS bending strain for case 20061023203818. Data from all the four
quadrants has been shown ....................................................................... 100
Figure 6.5: The RMS of cross-flow bending strains for case 20061023203818 ........... 102
Figure 6.6: Time-frequency plot of the cross-flow bending strain signal at the sensor
location with the largest RMS cross-flow bending strain in case
20061023203818 ...................................................................................... 103
Figure 6.7: The RMS of filtered cross-flow bending strains for case 20061023203818 104
Figure 6.8: Normalized PSD of the first nine POD subprocesses ................................ 106
Figure 6.9: The discrete mode-shape of the first POD mode ....................................... 107
Figure 6.10: The RMS of the reconstructed VIV displacement of the riser in cross-flow
direction for case 20061023203818 .......................................................... 108
Figure 6.11: The comparison of reconstructed and measured RMS CF bending strains at
the position where the target strain sensor locates .................................... 109
Figure 6.12: The RMS of the reconstructed VIV displacement of the riser in cross-flow
direction for the participating modes of 12-20 ........................................... 110
Figure 6.13: The RMS of the reconstructed VIV displacement of the riser in cross-flow
direction for the participating modes of 44-52 ............................................ 111
Figure 6.14: The RMS of the reconstructed VIV displacement of the riser in cross-flow
direction for the participating modes of 1-58 .............................................. 112
Figure 6.15: Peak response modal magnitude of riser cross-flow VIV response at 3.45Hz
.................................................................................................................. 113
Figure 6.16: Peak response modal phase angle of riser cross-flow VIV response at
3.45Hz ...................................................................................................... 113
Figure 6.17: The contour plot of a five-second-long reconstructed CF displacement time
series. The arrows trace the propogation of a crest in space and time. ..... 114
Figure A.1: Strake Configurations ................................................................................ 124
Figure A.2: Fairing and strake transitions from the 40% coverage cases with transition
.................................................................................................................. 125
Figure A.3: Fairing Configurations ............................................................................... 125
Figure C.1: PSD of CF displacements for the bare riser and uniform flow cases ......... 128
Figure C.2: PSD of IL displacements for the bare riser and uniform flow cases ........... 128
Figure C.3: PSD of CF displacements for the bare riser and sheared flow cases ........ 129
List of Figures
11
Figure C.4: PSD of IL displacements for the bare riser and sheared flow cases .......... 129
Figure C.5: PSD of CF displacements for 50% straked riser and uniform flow cases .. 130
Figure C.6: PSD of IL displacements for 50% straked riser and uniform flow cases .... 130
Figure C.7: PSD of CF displacements for 50% straked riser and sheared flow cases . 131
Figure C.8: PSD of IL displacements for 50% straked riser and sheared flow cases ... 131
Figure C.9: PSD of CF displacements for fully straked riser and uniform flow cases ... 131
Figure C.10: PSD of IL displacements for fully straked riser and uniform flow cases ... 132
Figure C.11: PSD of CF displacements for fully straked riser and sheared flow cases 132
Figure C.12: PSD of IL displacements for fully straked riser and sheared flow case .... 132
Figure D.1: Illustration of determining rotation angles of Q1-Q3 plane to cross-flow
direction at all the sensor locations by identifying maxima in the PSD of
cross-flow bending strains around 1X frequency (3.45 HZ) ....................... 136
List of Tables
12
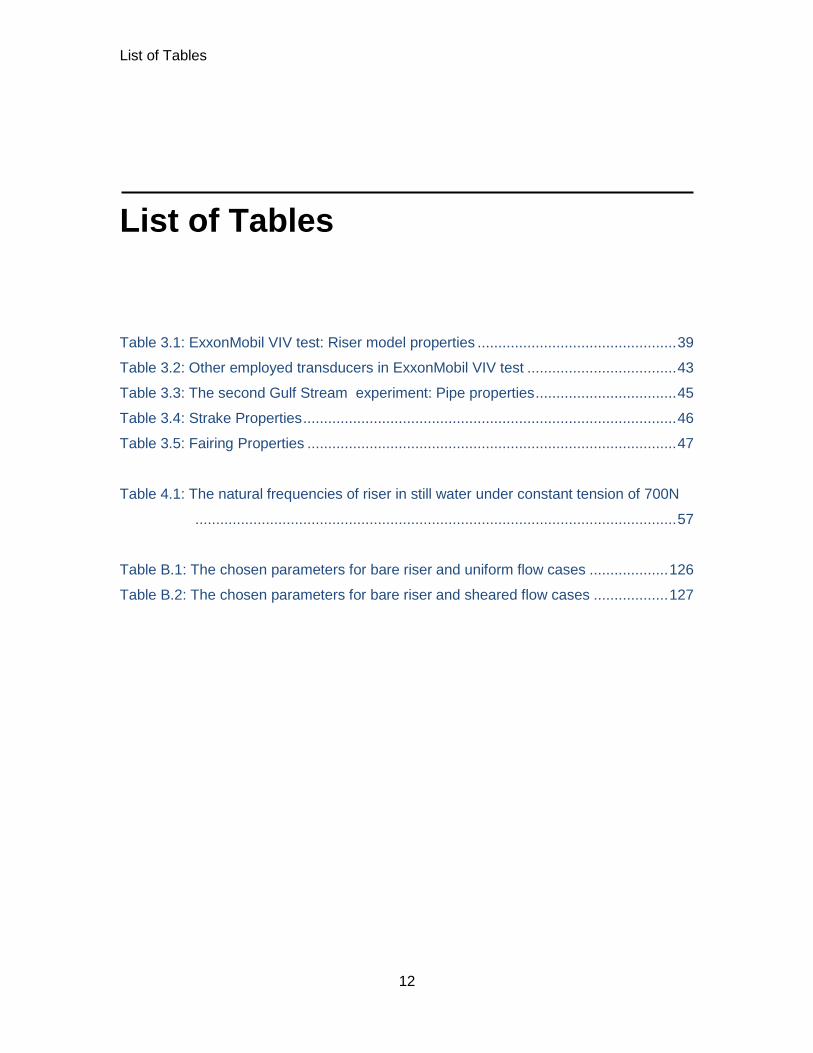
List of Tables
Table 3.1: ExxonMobil VIV test: Riser model properties ................................................ 39
Table 3.2: Other employed transducers in ExxonMobil VIV test .................................... 43
Table 3.3: The second Gulf Stream experiment: Pipe properties .................................. 45
Table 3.4: Strake Properties .......................................................................................... 46
Table 3.5: Fairing Properties ......................................................................................... 47
Table 4.1: The natural frequencies of riser in still water under constant tension of 700N
.................................................................................................................... 57
Table B.1: The chosen parameters for bare riser and uniform flow cases ................... 126
Table B.2: The chosen parameters for bare riser and sheared flow cases .................. 127

List of Tables
13
Nomenclature
14
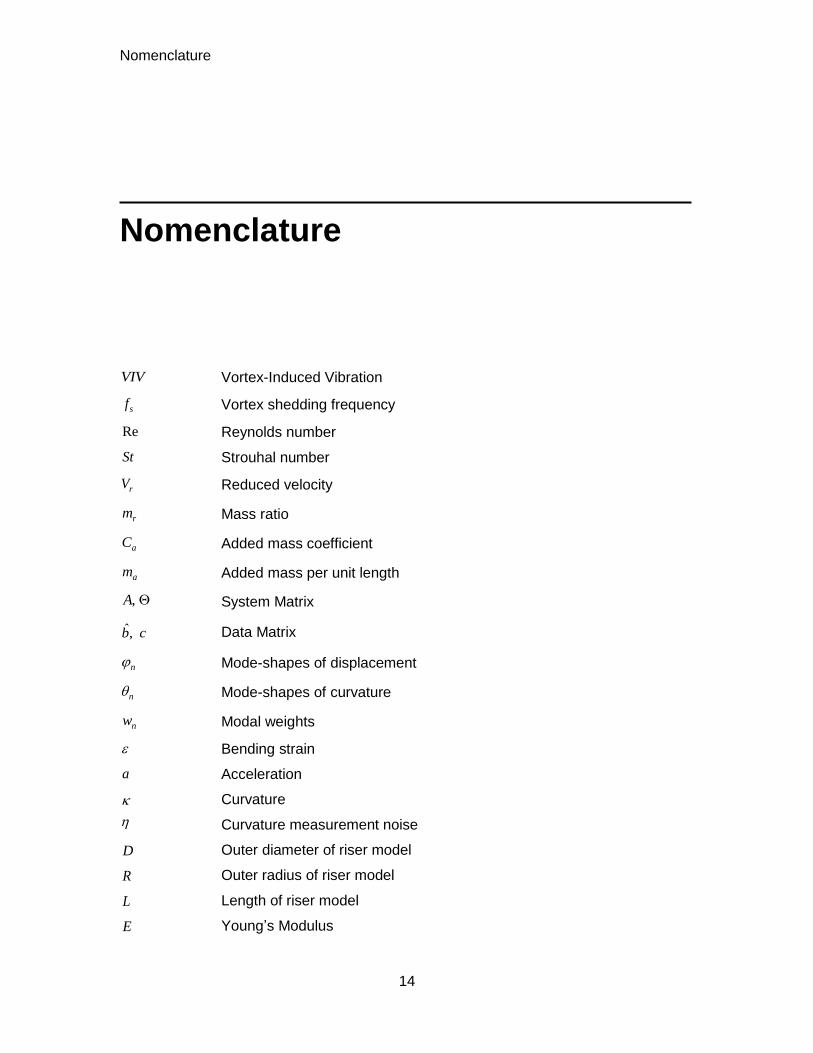
Nomenclature
VIV Vortex-Induced Vibration
sf Vortex shedding frequency
Re Reynolds number
St Strouhal number
rV Reduced velocity
rm Mass ratio
aC Added mass coefficient
am Added mass per unit length
,A System Matrix
ˆ,b c Data Matrix
n Mode-shapes of displacement
n Mode-shapes of curvature
nw Modal weights
Bending strain
a Acceleration
Curvature
Curvature measurement noise
D Outer diameter of riser model
R Outer radius of riser model
L Length of riser model
E Young’s Modulus
Nomenclature
15
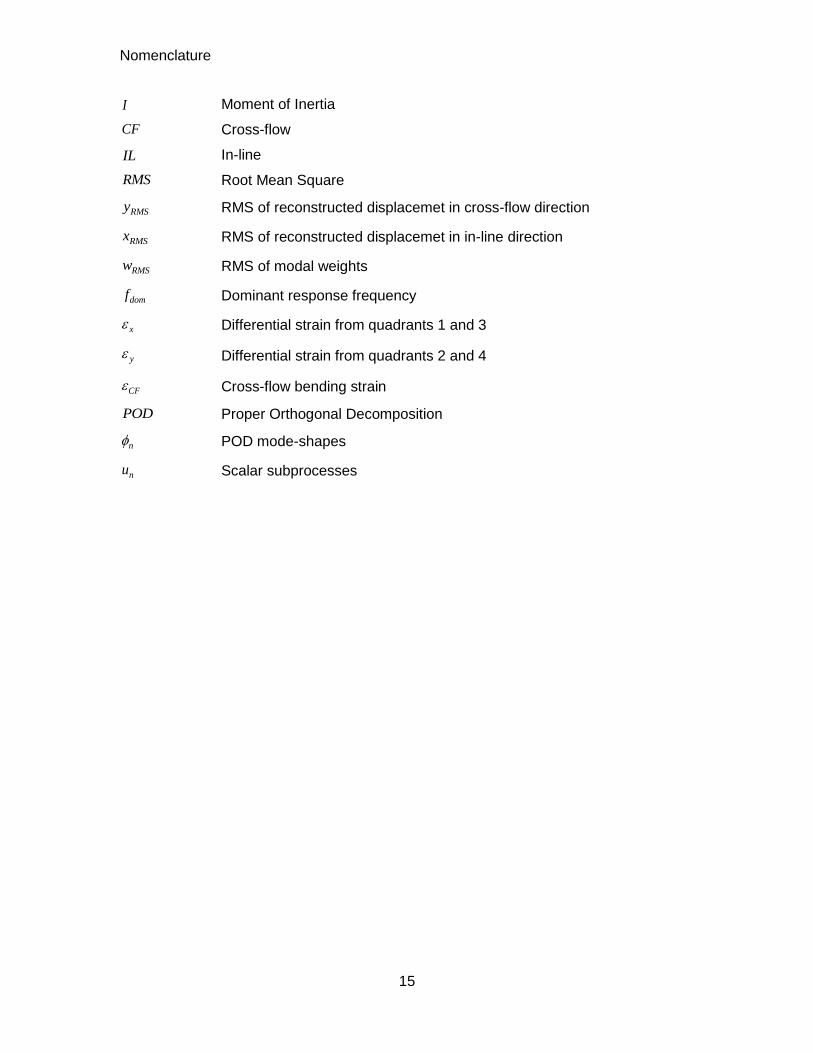
I Moment of Inertia
CF Cross-flow
IL In-line
RMS Root Mean Square
RMSy RMS of reconstructed displacemet in cross-flow direction
RMSx RMS of reconstructed displacemet in in-line direction
RMSw RMS of modal weights
domf Dominant response frequency
x Differential strain from quadrants 1 and 3
y Differential strain from quadrants 2 and 4
CF Cross-flow bending strain
POD Proper Orthogonal Decomposition
n POD mode-shapes
nu Scalar subprocesses
Chapter 1
16
Chapter 1
1 Introduction
1.1 Background
The offshore industry is a huge industry and it is very important from economical
perspective. Therefore, any unexpected stoppages about the offore platform’s
production would be quite expensive. What’s more, oil spill will cause a great pollution to
ocean environment, as happened in the Gulf of Mexico. Thus, it is very important to
ensure the offshore platform’s smooth and safe production. In the offshore industry, the
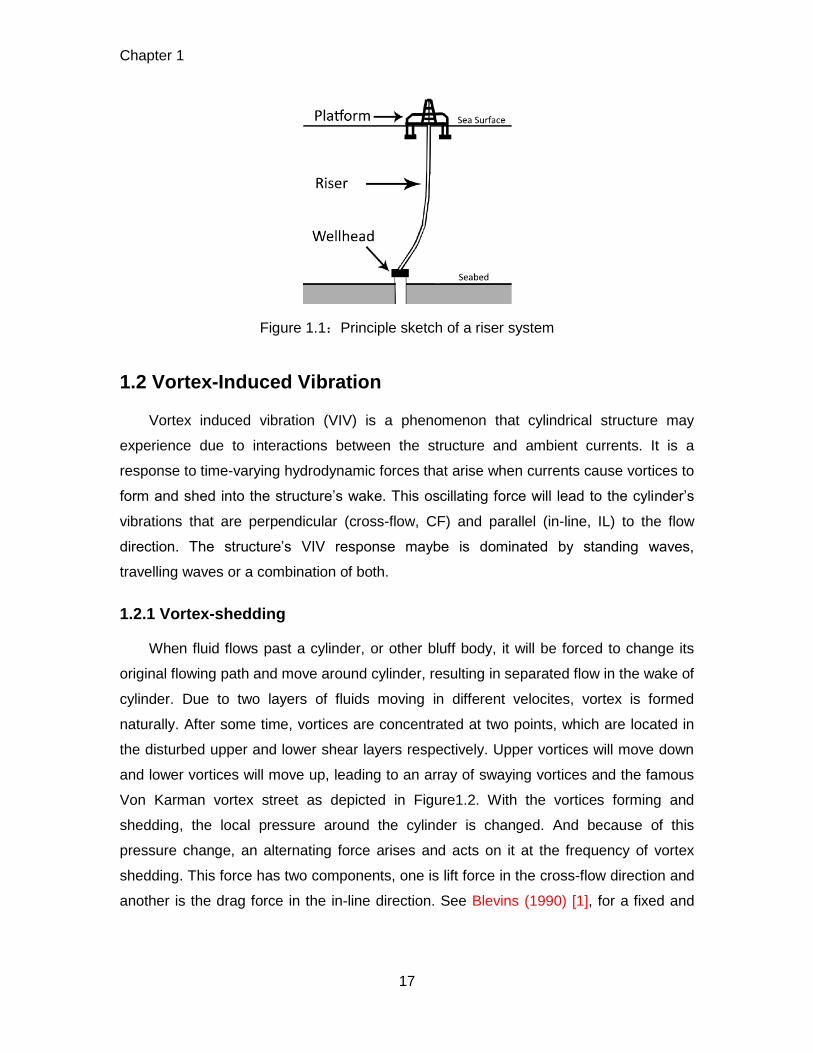
riser, which connects the platform to the well at the sea bed, see Figure 1, is one of the
most critical components. It is used for both drilling and oil transportation. And the
phenomenon of current-induced vortex-induced vibration (VIV) with regard to marine
riser is widely observed and it will cause costly and environmentally unfriendly fatigue
failure. In recent years, many offshore projects are done in deep water areas like Gulf of
Mexico and West Africa. As the water depth increases, the fatigue damage related to
wave and vessel motion may keep roughly constant or diminish. However, current can
act over the whole water depth, tending to cause more severe fatigue damage to marine
riser. In addition, in such deep water depth, long flexible risers are increasingly required.
And the VIV response of long flexible rier is more complicated than short rigid riser, thus,
it is quite important to predict the VIV response of this kind of riser.
Chapter 1
17
Figure 1.1:Principle sketch of a riser system
1.2 Vortex-Induced Vibration
Vortex induced vibration (VIV) is a phenomenon that cylindrical structure may
experience due to interactions between the structure and ambient currents. It is a
response to time-varying hydrodynamic forces that arise when currents cause vortices to
form and shed into the structure’s wake. This oscillating force will lead to the cylinder’s
vibrations that are perpendicular (cross-flow, CF) and parallel (in-line, IL) to the flow
direction. The structure’s VIV response maybe is dominated by standing waves,
travelling waves or a combination of both.
1.2.1 Vortex-shedding
When fluid flows past a cylinder, or other bluff body, it will be forced to change its
original flowing path and move around cylinder, resulting in separated flow in the wake of
cylinder. Due to two layers of fluids moving in different velocites, vortex is formed
naturally. After some time, vortices are concentrated at two points, which are located in
the disturbed upper and lower shear layers respectively. Upper vortices will move down
and lower vortices will move up, leading to an array of swaying vortices and the famous
Von Karman vortex street as depicted in Figure1.2. With the vortices forming and
shedding, the local pressure around the cylinder is changed. And because of this
pressure change, an alternating force arises and acts on it at the frequency of vortex
shedding. This force has two components, one is lift force in the cross-flow direction and
another is the drag force in the in-line direction. See Blevins (1990) [1], for a fixed and

Chapter 1
18
rigid circular cylinder in a uniform flow whose direction is perpendicular to the axis of
cylinder, the vortex shedding frequency is
s
Uf St
D (1.1)
Where, U is flow speed, D is the cylinder’s outer diameter, St is the Strouhal number,
a function of Reynolds number.
Figure 1.2:Von Karman Vortex Street
1.2.2 Lock in
If the vortex shedding frequency is close to one of the natural resonant frequencies
of the flexibly mounted cylinder, lock in may occur, see H.Blackburn and R.Henderson
(1996) [2] and M.R.Gharib (1999) [3]. Sometimes, it is called synchronization. However,
in this case, for a cylinder free to vibrate in transverse direction, it vibrates neither at the
frequency predicted by Equation (1.1), nor exactly at one of the natural frequencies
calculated under still water condition. The reason for this is the motion of cylinder and
vortex shedding would affect each other. In detail, the vibration of cylinder will control the
vortex shedding. And because of the forming and shedding of vortex, the added mass of
cylinder is changed, causing the natural frequency to shift somewhat. The added mass
could be increased or decreased, causing the natural frequency to go up or go down.
This phenomenon was observed in experiments by Sarpkaya (1978) [4] and
Gopalkrishnan (1993) [5].
For tensioned riser, it may have a lot of natural frequencies and corresponding
response modes, increasing the possibility of the occurrence of lock-in. When lock-in
happens, one of the response modes would dominate the VIV response and it seems
like a standing wave. And even in the case of lock-in, the vibration amplitude could not
be very large due to the increasing damping. For a long flexible riser, when current

Chapter 1
19
speed varys considerably along its length, there would be a multitude of vortex shedding
frequencies. As a consequence, several modes can be candidates for lock-in vibration.
What’s more, the variation of added mass would probably make the natural frequencies
of riser to be different from those calculated under still water condition. This would make
us hard to find the participating mode exactly just according the oscillating frequency.
From model tests with a taut cable in sheared flow, Lie et al., (1997) [6] find that a
second-mode lock-in vibration changed to a third-mode lock-in in a short time while the
VIV frequency kept unchanged.
1.2.3 Influencing parameters
Reynolds number, Re , is a dimensionless number which is the ratio of inertial
forces to viscous forces. It is used to classify the flow patterns. Laminar flow occurs at
low Reynolds numbers (<2300) and turbulent flow occurs at high Reynolds numbers
(>4000). The definition of Reynolds number is given by:
ReUD UD
(1.2)
Where, U is the mean fluid velocity, D is the diameter of the cylinder, is the density
of the fluid, is the dynamic viscosity of the fluid, and is the kinematic viscosity of the
fluid.
Strouhal number, St , is a dimensionless number describing oscillating flow
mechanisms. It is given by
sf DSt
U (1.3)
Where, sf is the vortex-shedding frequency (also referred to as the Strouhal frequency),
D is the diameter of the cylinder, and U is the mean flow velocity. Strouhal number is
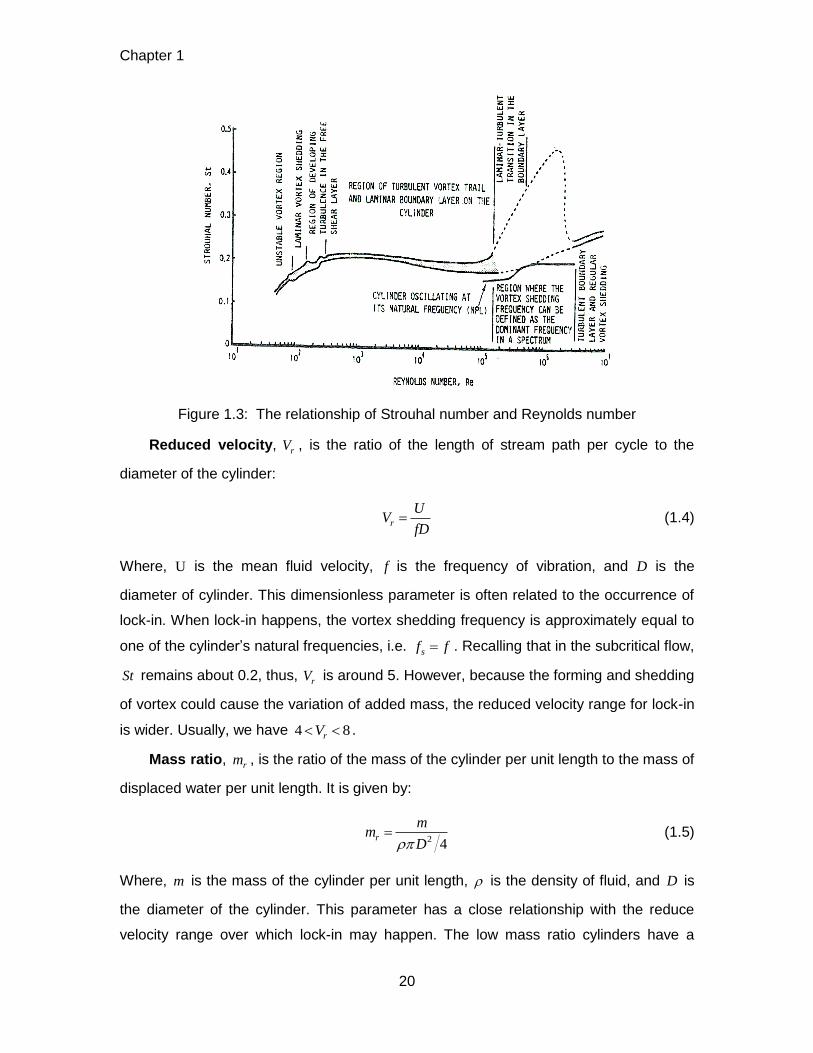
the function of Reynolds number and their relationship can be seen in Figure 1.3 from
Lienhard (1996) [7]. In the subcritical regime, the value of St remains at about 0.2. In the
critical regime, the variation range of Strouhal number is relatively large and its
maximum value could be 0.4. In the supercritical regime, the Strouhal number is about
0.27.
Chapter 1
20
Figure 1.3: The relationship of Strouhal number and Reynolds number
Reduced velocity, rV , is the ratio of the length of stream path per cycle to the
diameter of the cylinder:
r
UV
fD (1.4)
Where, U is the mean fluid velocity, f is the frequency of vibration, and D is the
diameter of cylinder. This dimensionless parameter is often related to the occurrence of
lock-in. When lock-in happens, the vortex shedding frequency is approximately equal to
one of the cylinder’s natural frequencies, i.e. sf f . Recalling that in the subcritical flow,
St remains about 0.2, thus, rV is around 5. However, because the forming and shedding
of vortex could cause the variation of added mass, the reduced velocity range for lock-in
is wider. Usually, we have 4 8rV .
Mass ratio, rm , is the ratio of the mass of the cylinder per unit length to the mass of
displaced water per unit length. It is given by:
2 4
r
mm
D (1.5)
Where, m is the mass of the cylinder per unit length, is the density of fluid, and D is
the diameter of the cylinder. This parameter has a close relationship with the reduce
velocity range over which lock-in may happen. The low mass ratio cylinders have a
Chapter 1
21
much wider lock-in range than the high mass ratio cylinders. It is because the influence
of added mass variation is more critical for low mass ratio cylinders.
Added mass coefficient, aC , is defined as the ratio of added mass to the mass of
displaced fluid and given as:
2 4
aa
mC
D (1.6)
The oscillating cylinder in a fluid will force the surrounding fluid particles to accelerate,
resulting in one force acting on the cylinder. This force is in phase with the inertial force
of the cylinder. This phenomenon is equal to add some virtual mass on the cylinder. The
added mass coefficient, aC , is a function of vibrating frequency, local flow condition and
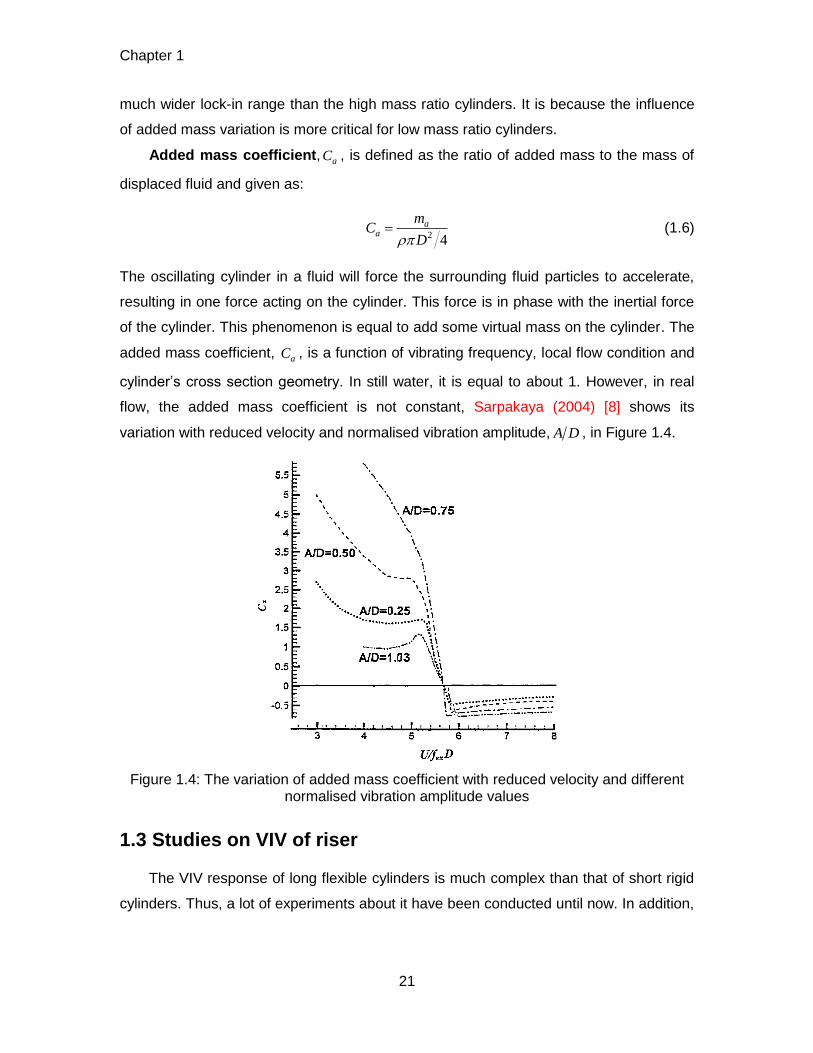
cylinder’s cross section geometry. In still water, it is equal to about 1. However, in real
flow, the added mass coefficient is not constant, Sarpakaya (2004) [8] shows its
variation with reduced velocity and normalised vibration amplitude, A D , in Figure 1.4.
Figure 1.4: The variation of added mass coefficient with reduced velocity and different normalised vibration amplitude values
1.3 Studies on VIV of riser
The VIV response of long flexible cylinders is much complex than that of short rigid
cylinders. Thus, a lot of experiments about it have been conducted until now. In addition,
Chapter 1
22
some semi-empirical computational programmes and the numerical method are
constructed to predict its VIV response.
1.3.1 Experimental studies
Over the past decades, several VIV experiments using long flexible risers were
performed. The measured data can be used as benchmark information to update
database and improve VIV calculating models.
Some VIV experiments were conducted in laboratory. In June 2003, Exxonmobil
performed VIV testing on a long flexible riser at the Norwegian Marine Technology
Research Institute (Marintek), see Frank et al., (2004) [9]. The used riser was made of
brass with a length of 9.63m and an outer diameter of 20m. This testing was conducted
on both bare riser and straked risers with four percentages of spatial coverage. Uniform
flow and linearly sheared flow were simulated. Bending strains and accelerations were
measured in both CF and IL directions.
In late 2003, the Norwegian Deepwater Programme (NDP) also performed a VIV
testing at Marintek (H.Braaten and H.Lie, 2004) [10]. During experiment, a long model
riser with a length of 38m and diameter of 27mm was towed horizontally by their
Trondheim Ocean Basin facility. Uniform flow and linearly sheared flow were also
simulated in this experiment. And bending strains and accelerations were measured in
both CF and IL directions. This testing was conducted with bare riser and straked risers.
These straked risers have two different geometries and some different percentages of
strake coverage.
In addition, some VIV tests using long flexible cylinder were performed under field
conditions. In 1997, at Hanøytangen outside Bergen, Norway, the Hanøytangen testing
was conducted (Huse et al., 1998) [11]. The length of tested riser was 90m and the
diameter was 30mm. The riser was furnitured with 29 bending strain sensors at every
3m in both CF and IL directions. A well defined lineared flow was simulated.
In 2004, at Lake Seneca, New York, the Lake Seneca VIV testing was conducted at
the Naval Underwater Warfare Center (NUWC) Test Facility (Vandiver et al., 2005) [12].
The tested risers have two different lengths, 61.26m and 122.23m, and a diameter of
3.33m. It was tensioned by a railroad suspended at the bottom of riser and towed by
boat at velocities ranging from 0.3m/s to 1.1m/s. The response was measured by evenly
spaced triaxial accelerometers. Both bare riser and riser with a triple helical strake were
tested.
Chapter 1
23
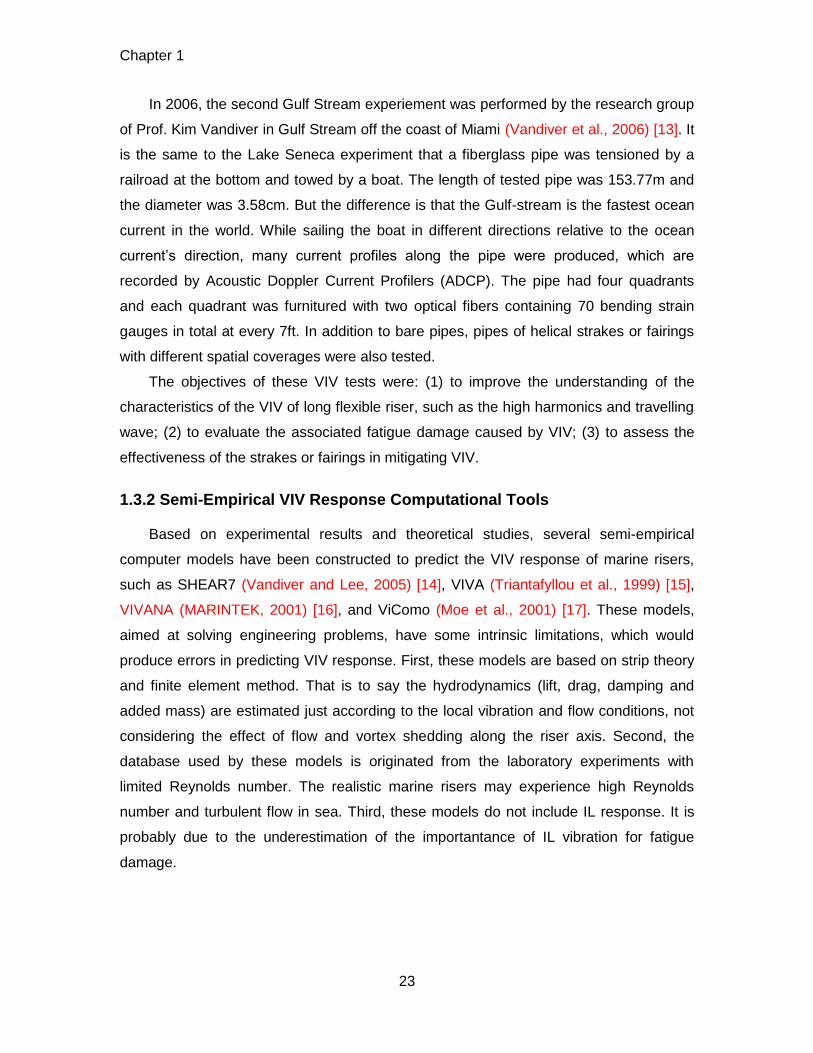
In 2006, the second Gulf Stream experiement was performed by the research group
of Prof. Kim Vandiver in Gulf Stream off the coast of Miami (Vandiver et al., 2006) [13]. It
is the same to the Lake Seneca experiment that a fiberglass pipe was tensioned by a
railroad at the bottom and towed by a boat. The length of tested pipe was 153.77m and
the diameter was 3.58cm. But the difference is that the Gulf-stream is the fastest ocean
current in the world. While sailing the boat in different directions relative to the ocean
current’s direction, many current profiles along the pipe were produced, which are
recorded by Acoustic Doppler Current Profilers (ADCP). The pipe had four quadrants
and each quadrant was furnitured with two optical fibers containing 70 bending strain
gauges in total at every 7ft. In addition to bare pipes, pipes of helical strakes or fairings
with different spatial coverages were also tested.
The objectives of these VIV tests were: (1) to improve the understanding of the
characteristics of the VIV of long flexible riser, such as the high harmonics and travelling
wave; (2) to evaluate the associated fatigue damage caused by VIV; (3) to assess the
effectiveness of the strakes or fairings in mitigating VIV.
1.3.2 Semi-Empirical VIV Response Computational Tools
Based on experimental results and theoretical studies, several semi-empirical
computer models have been constructed to predict the VIV response of marine risers,
such as SHEAR7 (Vandiver and Lee, 2005) [14], VIVA (Triantafyllou et al., 1999) [15],
VIVANA (MARINTEK, 2001) [16], and ViComo (Moe et al., 2001) [17]. These models,
aimed at solving engineering problems, have some intrinsic limitations, which would
produce errors in predicting VIV response. First, these models are based on strip theory
and finite element method. That is to say the hydrodynamics (lift, drag, damping and
added mass) are estimated just according to the local vibration and flow conditions, not
considering the effect of flow and vortex shedding along the riser axis. Second, the
database used by these models is originated from the laboratory experiments with
limited Reynolds number. The realistic marine risers may experience high Reynolds
number and turbulent flow in sea. Third, these models do not include IL response. It is
probably due to the underestimation of the importantance of IL vibration for fatigue
damage.
Chapter 1
24
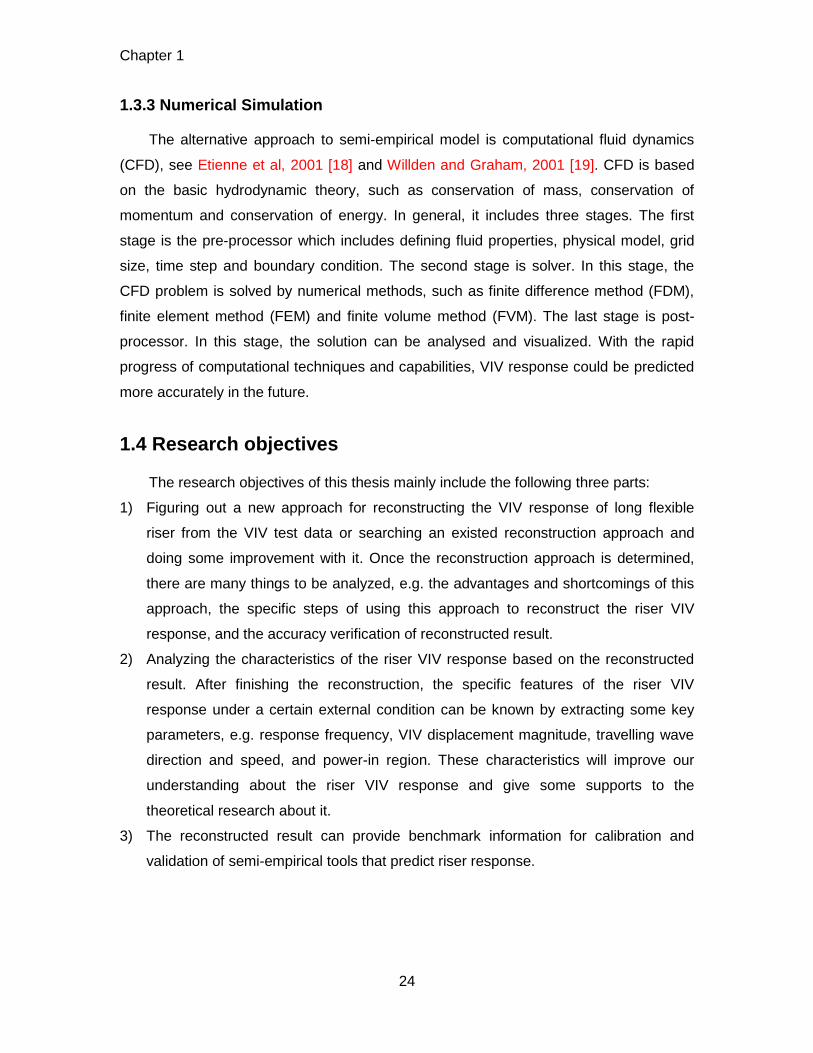
1.3.3 Numerical Simulation
The alternative approach to semi-empirical model is computational fluid dynamics
(CFD), see Etienne et al, 2001 [18] and Willden and Graham, 2001 [19]. CFD is based
on the basic hydrodynamic theory, such as conservation of mass, conservation of
momentum and conservation of energy. In general, it includes three stages. The first
stage is the pre-processor which includes defining fluid properties, physical model, grid
size, time step and boundary condition. The second stage is solver. In this stage, the
CFD problem is solved by numerical methods, such as finite difference method (FDM),
finite element method (FEM) and finite volume method (FVM). The last stage is post-
processor. In this stage, the solution can be analysed and visualized. With the rapid
progress of computational techniques and capabilities, VIV response could be predicted
more accurately in the future.
1.4 Research objectives
The research objectives of this thesis mainly include the following three parts:
1) Figuring out a new approach for reconstructing the VIV response of long flexible
riser from the VIV test data or searching an existed reconstruction approach and
doing some improvement with it. Once the reconstruction approach is determined,
there are many things to be analyzed, e.g. the advantages and shortcomings of this
approach, the specific steps of using this approach to reconstruct the riser VIV
response, and the accuracy verification of reconstructed result.
2) Analyzing the characteristics of the riser VIV response based on the reconstructed
result. After finishing the reconstruction, the specific features of the riser VIV
response under a certain external condition can be known by extracting some key
parameters, e.g. response frequency, VIV displacement magnitude, travelling wave
direction and speed, and power-in region. These characteristics will improve our
understanding about the riser VIV response and give some supports to the
theoretical research about it.
3) The reconstructed result can provide benchmark information for calibration and
validation of semi-empirical tools that predict riser response.
Chapter 1
25
1.5 Thesis outline
This thesis is structured as follows:
Chapter 1 presents a brief introduction about vortex-induced vibration and summary
on the studies on it in the past.
Chapter 2 describes the issue that will be addressed in the thesis and presents two
approaches, i.e. modal approach and Fourier series approach, to reconstruct the riser
VIV response. After comparing the advantages and shortcomings of these two
approaches, the modal approach is chosen. And the modal approach can be classified
as frequency domain method and time domain method. In addition, the errors induced
by the noise on strain signal and chosen participating modes are analyzed.
Chapter 3 gives an introduction of ExxonMobil experimental VIV test and the
second Gulf Stream field VIV test, which includes experiment set-up, tested riser model
and measurement system.
Chapter 4 performs the riser VIV response reconstruction with regard to the
ExxonMobil VIV test. The systematic and detailed reconstruction steps are presented.
In addition, the error analysis and accuracy verification are done.
Chapter 5 analyzes the riser VIV responses in ExxonMobil VIV test. Some key
characteristics about riser VIV response, e.g. response frequency, VIV displacement
magnitude and travelling wave, can be extracted from the reconstructed results in
previous chapter. By analyzing those extracted features, the influences of external
conditions, e.g. current speed, current profiler and covered strake or fairing, on the riser
VIV response could be found.
Chapter 6 performs the riser VIV response reconstruction in terms of the second
Gulf Stream VIV test. Because of the long length of the tested pipe and complicated
current condition, the riser VIV response in this test is very complex and irregular. Thus,
the Proper Orthogonal Decomposition (POD) method is used to decompose the
measured data and extract the energetic and relatively regular riser VIV resposne. POD
can also aid the identification of the participating modes. This technique is very useful in
reconstructing the riser VIV response in VIV field test.
Chapter 7 summarizes the principle contributions of each chapter and provides
some recommendations for the future research about this subject.
Chapter 2
26
Chapter 2
2 Approach to riser VIV response
reconstruction
2.1 Problem statement
As we all know, vortex-induced vibration is a very complex interaction problem of
fluid and structure. In order to understand it deeply, the riser VIV motion is needed to be
obtained. One approach to achieve it is that when riser properties and flow condition are
known, we can use the knowledge of hydrodynamics to estimate the vortex-induced
forces, and then use the knowledge of structural dynamics to calculate the vortex-
induced motion. Another approach is that we can obtain it from the sensor measurement
data of VIV experiement. These sensor measurements have the following characteristics:
1) High temporal sampling rate: Each sensor measures the signal with high sampling in
time. It is because the VIV of riser often involves high harmoic and frequency motion.
2) Limited number of sensors: In general, only a limited number of sensors are put on
the selected positions of the riser. It is because the employment of a large number of
sensors will increase the experiment cost largely considering that the riser in field
VIV test is often very long. What’s more, if two sensors are located too closely, they
would mutually influence the quality of their measurement. Usually, the sensors are
often evenly placed. However, they probably become unevenly spaced because of
the failure of some sensors during test.
3) Indirect measurement of displacement: At present, it is not feasible to measure the
riser displacement directly. The typical employed sensors in VIV experiments now
are accelerometer for measuring acceleration, and strain gauge for measuring
bending strain.

Chapter 2
27
Therefore, I need to use these indirect measurements of riser displacement from the
limited number of sensors on the riser to reconstruct the riser VIV motion, i.e. to obtain
the VIV motion at all the points along its span.
2.2 Reconstruction approach
A spatial continuous function along the length of the riser is the prerequisite for riser
VIV response reconstruction. After reading some related literatures, the modal approach
had been applied mostly to solve the reconstruction issue from different signals, e.g.
Kaasen et al. (2000) [20], who used rotation-rates and accelerations as input signals,
and Trim et al. (2005) [21], who adopted the strain and acceleration signals, and Lie and
kaasen (2006) [22], who used only the strain signals.
2.2.1 Modal approach
All of the above researchers thought that the displaced shape of the riser could be
composed as a series of its free vibration modes, at any instant in time. Thus, for
example, the VIV displacement in cross-flow direction can be expressed as:
1
( , ) ( ) , 0,n n
n
y z t w t z z L
(2.1)
Under different fluid conditions, the response frequencies along the riser’s span are
different and so the participating modes become different. In order to avoid the error
result from the participation of spurious higher or lower modes, the way of choosing the
participating modes from 1 to maximum number M, i.e. the number of measurements, is
not accepted. Assuming the participating modes are n1 to nN, Equation (2.1) can be
recasted as:
1
( , ) ( ) , 0,Nn
n n
n n
y z t w t z z L
(2.2)
Where, t is the time, z denotes the vertical position along the riser with origin at the top
end, L is the length of the riser, ( )nw t are the modal weights, n z are the eigenmodes
or mode-shapes, and n is the order of mode.
Assuming that there are M measurements in a VIV test, then a linear system with M
equations and N (N=nN-n1+1) unknowns can be established using the relationships
between VIV displacement and measurements, e.g. bending strain and acceleration.
Chapter 2
28
After solving this linear system, the modal weights at any instance of time are obtained
and then the riser VIV response reconstruction is finished.
2.2.2 Theoretical basis for modal approach
The modal approach is based on the theory of Modal Analysis. As we all know, for
an umdamped structural system with N degrees of freedom, its free vibration can be
written as follow:
1 1
ˆ ˆ( ) sin( ) ( )N N
i i i i i i
i i
y t y A t y u t
(2.3)
Where, ˆiy is the eigenvectors or eigenmodes of the structural system, i is the natural
frequencies of the structural system.
According to Spijkers et al. (2005) [23], with regard to a structural system of N
degrees of freedom under external forces, similar to the free vibration, the particular
solution for its forced vibration is also assumed to be a summation of eigenvectors and
can be written as
1
ˆ( ) ( ) ( )N
i i
i
y t y u t Eu t
(2.4)
Where, ( )iu t are unkown time functions different from that in Equation (2.3).
Notice that here a summation of synchronised motions is assumed. This
assumption is the essence of the so-called Modal Analysis. Translated in mathematical
terminology, it is thus assumed that also in the case of forced vibration, the response
can be expanded in eigenvectors each weighed with an unknown time fuction, i.e. modal
weight. All in all, it implies that at any instant in time, the shape of the structural system
with or without external forces can be expressed by a superposition of its eigenvectors,
each with a modal participation factor. VIV is a forced vibration of the riser under
hydrodynamic forces, so the modal approach is applicable theoretically.
2.2.3 Limitations of modal approach
Although the modal approach is a theoretically applicable method to solve the
reconstruction problem, it has some limitations as follows:
1) The behaviour of riser VIV is actually a nonlinear problem due to the nonlinear
damping. However, the modal approach is based on the linear structural dynamics

Chapter 2
29
techniques and the mode superposition principle. Using a linear approach to slove a
nonlinear issue, the error is unavoidable.
2) Usually, the riser in VIV test is identical to a tensioned beam with the pinned-pinned
boundary condition. Thus, in the later parts solving the reconstruction problem, the
mode-shapes of the riser’s VIV displacement are approximated with sinusoids, i.e.
sinn z n z L . Actually, only when the riser is without damping and has uniform
mass distribution along its span, its mode-shapes can be absolutely sinusoidal.
However, the riser in VIV test is often with damping, thus, the actual mode-shapes
are complex. Besides, since the added mass and damping will change in time and
space with frequency and amplitude of vibration, the true mode-shapes for the riser
in VIV test are not constant and then very hard to find out. Finally, some
experimental conditions will also impose some influences on the eigenmodes of the
riser. For example, in the ExxonMobil VIV test introduced in chapter 3, the upper
end of the riser was connected to a spring system and would sag due to current
drag. And in the second Gulf Stream VIV test described in chapter 3, the utilized
riser was deflected in a degree due to the current drag force during the test.
3) Even though the sinusoidal mode-shapes are very close to the actual mode-shapes
of the tested riser, the perfectly correct participating modes are still quite hard to find
out. It is mainly due to the following two reasons. On one hand, in this thesis, the
choice of participating modes is based on simply calculated natural frequencies of
the riser in still water and the spectral analyses of measurements. However, due to
time-varying tension, and temporal and spatial variation of added mass, the natural
frequencies of the tested riser are not constant and are always changing.
Consequently, the simply calculated natural frequencies are not always correct. On
the other hand, sometimes, the riser VIV response contains a lot of frequencies and
is dominated by the travelling wave, especially under sheared flow condition, which
will make it quite difficult to identify the absolutely correct participating modes. So
the only thing I can do is to make sure that the main participating modes will be
definitely included and reconstruction error will be reduced as small as possible.
2.3 Modal approach description
The modal approach can be classified into frequency domain method or time
domain method and using which method depends on the types of provided

Chapter 2
30
measurements. When attainable signals are both acceleration and strain, the frequency
domain method is preferred because acceleration involves the second time derivative of
displacement and the time function ( )n t in Equation (2.2) is unknown. If only strain
signal is provided, the time domain method can be adopted to solve the VIV response
reconstruction issue. These two methods will be introduced in detail below.
2.3.1 Frequency domain method
The detailed procedures of using the frequency domain method to solve the VIV
response reconstruction issue are described below.
At first, the curvature, , can be derived from the bending strain as
( , )
( , )z t
z tR
(2.5)
Where, is the bending strain and R is the outer radius of the riser model.
The curvature, , is also approximately equal to the second derivative of the lateral
displacement in vertical spatial direction. It is given as
2
2
( , )( , )
y z tz t
z
(2.6)
Using Equation (2.2), the curvature and acceleration can be written as
1 1
( , ) ( ) ( ), ( , ) ( ) ( )N Nn n
n n n n
n n n n
z t w t z a z t w t z
(2.7)
Where, the second spatial derivative is denoted by y , and the second time
derivative is denoted by a y .
In order to solve the two equations simultaneously in Equation (2.7), they have to be
posed in frequency domain. Denoting the Fourier transform in time by a hat, i.e. y F y ,
we get
1 1
2ˆ ˆ ˆ ˆ( , ) ( ) ( ), ( , ) ( ) ( )N Nn n
n n n n
n n n n
z w z a z w z
(2.8)
Where, the relationship of 2ˆ ˆy y is used.
Assuming that M strain sensors and aM accelerometers are used along the tested
riser in cross-flow direction in a VIV test. We can assemble the two equations in
Equation (2.8) and pose them in a linear system as

Chapter 2
31
ˆˆAw b (2.9)
Where, the system matrix A contains the discrete eigenvectors, the data matrix b
contains the measurement data in frequency domain, and the matrix w contains the
modal weights in frequency domain. They are expressed in detail as
1 2
1 2
1 2
1 2
1 2
1 2
1 1 1
2 2 2
1 1 1
2 2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
N
N
N
N
N
a a N a
n n n
n n n
n M n M n M
n n n
n n n
n M n M n M
z z z
z z z
z z zA
z z z
z z z
z z z
1 1 1
2 2 2
1 2
1 2
1 2
ˆ ˆ ˆ( ) ( ) ( )
ˆ ˆ ˆ( ) ( ) ( )ˆ
ˆ ˆ ˆ( ) ( ) ( )N N N
n n n
n n n
n n n
w w w
w w ww
w w w
1 1 1 2 1
2 1 2 2 2
1 2
1 1 1 2 1
2 2 21 2
2 1 2 2 2
2 2 21 2
1
21
ˆ ˆ ˆ( , ) ( , ) ( , )
ˆ ˆ ˆ( , ) ( , ) ( , )
ˆ ˆ ˆ( , ) ( , ) ( , )
ˆ ˆ ˆ( , ) ( , ) ( , )
ˆ
ˆ ˆ ˆ( , ) ( , ) ( , )
ˆ ˆ( , ) ( ,a a
M M M
M M
z z z
z z z
z z z
a z a z a z
b
a z a z a z
a z a z
2
2 22
ˆ) ( , )aMa z
Where, Mzare the positions where strain sensors locate,
aMz are the positions where
accelerometers locate, are the resolved frequency components based on the
sampling frequency after doing Fourier transform and not the natural frequencies of the
tested riser.
Chapter 2
32
Assemble
Compute Fourier transform
Given data:
Reconstruction in
frequency domain
Compute inverse
Fourier transform
Obtain displacement
at any location
It can be seen from Equation (2.9) that we have ( )aM M M M equations with
1 1NN N n n unknowns. In order to avoid an under-determined system, we require
that N M . If the number of selected modes is equal to the number of measurements
( N M ), the system of equations has a single and unique solution as
1 ˆw A b (2.10)
If fewer than M modes participate in the riser VIV response, the system can be
sloved using the least square method. The solution becomes
1 ˆ ˆˆ ( ) ( ) ( ) ( )T Tw A A A b Hb (2.11)
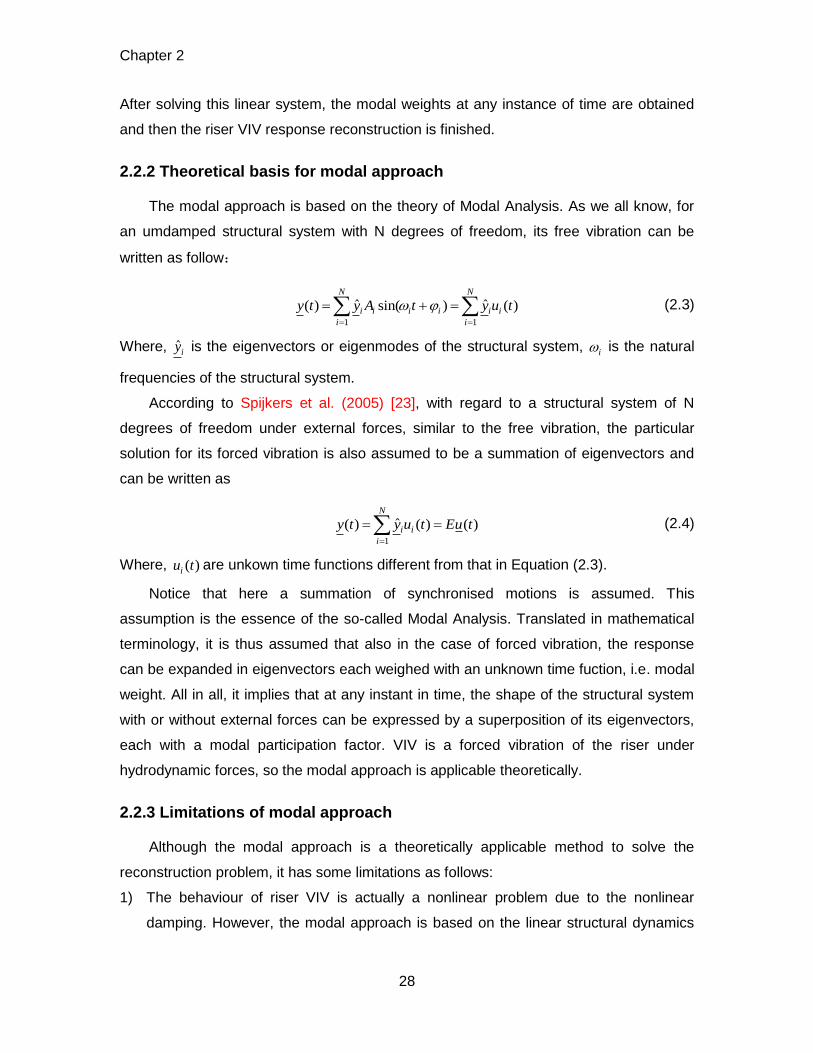
Once the modal weights in frequency domain is obtained, we can do inverse Fourier
transform with it to achieve the modal weights in time domain, i.e. 1 ˆ( ) ( )w t F w .
Finally, the VIV displacement at all the points along the length of the riser, at any
instant of time, can be obtained using Equation (2.2). This method can be applied to
cross-flow and in-line VIV response reconstructions separately and it should be noted
that the number of selected modes and which modes may be quite different for them.
The overall frequency domain method for riser VIV response reconstruction is
described as a flow chart in Figure 2.1.
Figure 2.1: Flow chart of frequency domain method for riser VIV response reconstruction

Chapter 2
33
2.3.2 Time domain method
In the case that only strain data is provided, the time domain method can be used to
slove the problem of riser VIV response reconstruction. The difference of this method
from the frequency domain method is that we do not perform Fourier transform with
Equation (2.7). The reconstruction issue can be just posed in time domain using the first
equation in Equation (2.7). Recasting this equation as
1 1
( , ) ( ) ( ) ( ) ( )N Nn n
n n n n
n n n n
z t w t z w t z
(2.12)
Where, ( )n z are the mode-shapes of riser curvature.
Assembling the above equation in each sampling time, a linear system in time
domain will be established as
( ) ( )w t c t (2.13)
Where, the system matrix, , comprises the mode-shapes of riser curvature, the data
matrix, c , is formed from the measured strains, and the matrix, w , contains the modal
weights in time domain. They are expressed in detail as
1 2
1 2
1 2
1 1 1
2 2 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
N
N
N
n n n
n n n
n M n M n M
z z z
z z z
z z z
1 1 1
2 2 2
1 2
1 2
1 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )N N N
n n n n
n n n n
n n n n
w t w t w t
w t w t w tw
w t w t w t
1 1 1 2 1
2 1 2 2 2
1 2
( , ) ( , ) ( , )
( , ) ( , ) ( , )
( , ) ( , ) ( , )
n
n
M M M n
z t z t z t
z t z t z tc
z t z t z t
Similarly, as long as 1 1NN N n n is smaller than M , this system can be
sloved in a least-squares sense as
1( ) ( ) ( )T Tw t c t (2.14)
Chapter 2
34
Given data:
Assemble:
Reconstruction in
time domain:
Obtain displacement
at any location:
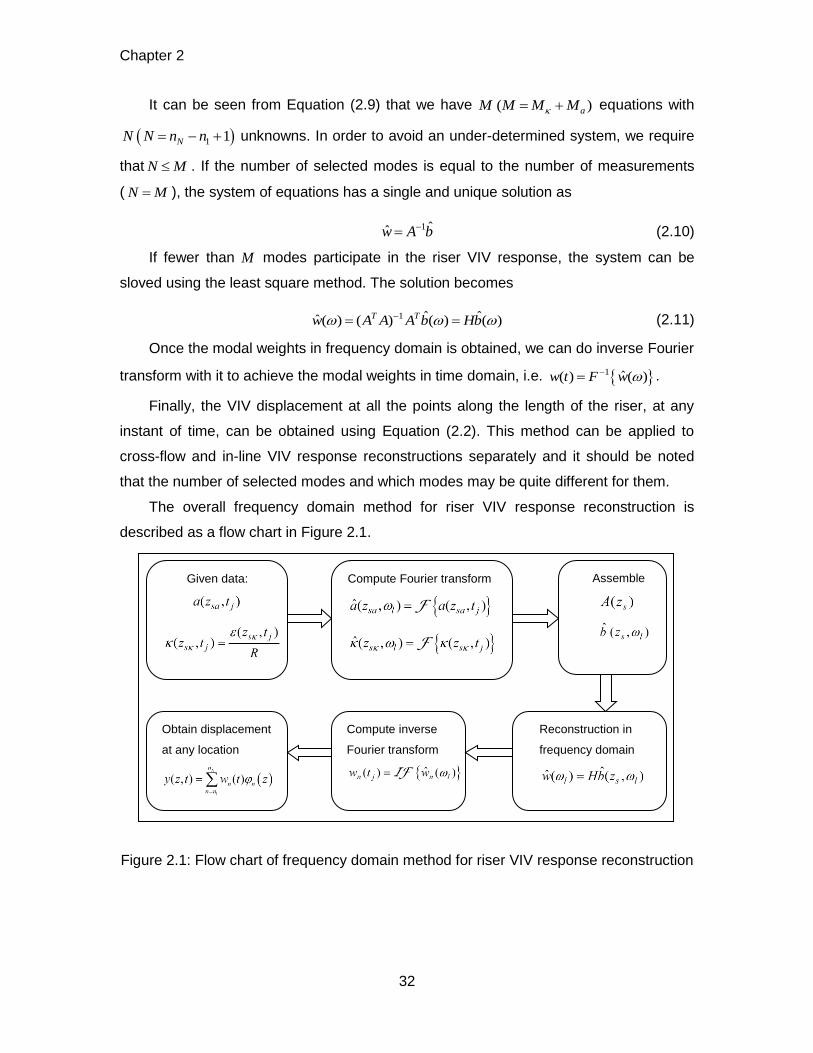
After obtaining the modal weights vector at any instant of time, Equation (2.2) can
be used again to achieve the VIV displacements of all the points on the riser, at any
instant of time.
The overall time domain method for riser VIV response reconstruction is described
as a flow chart in Figure 2.2
Figure 2.2: Flow chart of time domain method for riser VIV response reconstruction
2.4 Identifiably and error analysis
2.4.1 Identifiably analysis
As mentioned previously, the mode-shapes of VIV displacement are approximated
with sinusoids, i.e.
( ) sinn
nz z
L
(2.15)
Then the mode-shapes of riser curvature become sinusoidal too and it can be
written as
2( ) ( ) ( ) sin( )n n
n nz z
L L
(2.16)
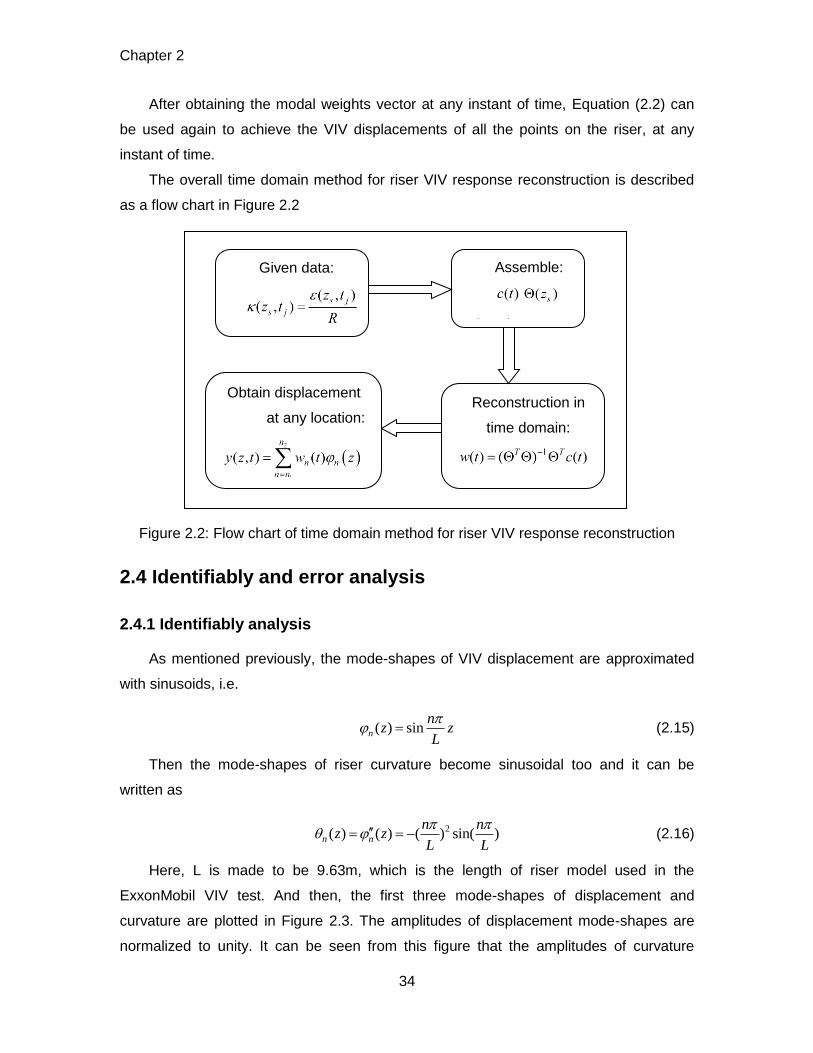
Here, L is made to be 9.63m, which is the length of riser model used in the
ExxonMobil VIV test. And then, the first three mode-shapes of displacement and
curvature are plotted in Figure 2.3. The amplitudes of displacement mode-shapes are
normalized to unity. It can be seen from this figure that the amplitudes of curvature
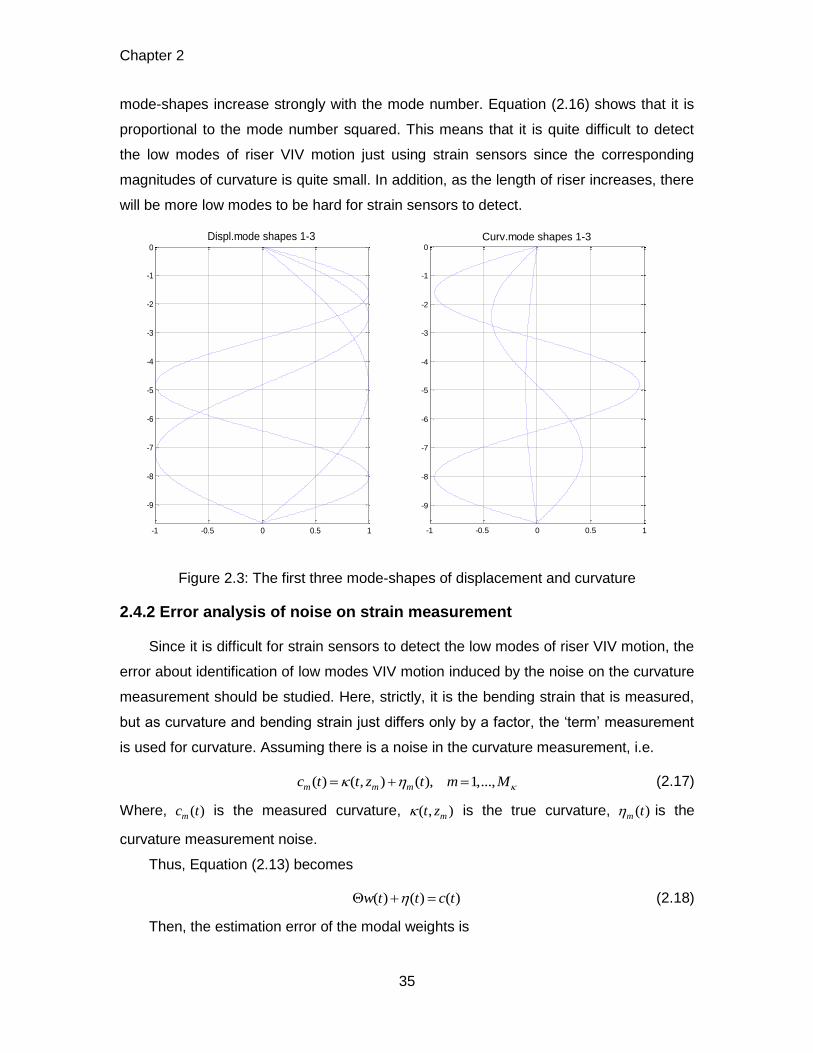
Chapter 2
35
mode-shapes increase strongly with the mode number. Equation (2.16) shows that it is
proportional to the mode number squared. This means that it is quite difficult to detect
the low modes of riser VIV motion just using strain sensors since the corresponding
magnitudes of curvature is quite small. In addition, as the length of riser increases, there
will be more low modes to be hard for strain sensors to detect.
Figure 2.3: The first three mode-shapes of displacement and curvature
2.4.2 Error analysis of noise on strain measurement
Since it is difficult for strain sensors to detect the low modes of riser VIV motion, the
error about identification of low modes VIV motion induced by the noise on the curvature
measurement should be studied. Here, strictly, it is the bending strain that is measured,
but as curvature and bending strain just differs only by a factor, the ‘term’ measurement
is used for curvature. Assuming there is a noise in the curvature measurement, i.e.
( ) ( , ) ( ), 1,...,m m mc t t z t m M (2.17)
Where, ( )mc t is the measured curvature, ( , )mt z is the true curvature, ( )m t is the
curvature measurement noise.
Thus, Equation (2.13) becomes
( ) ( ) ( )w t t c t (2.18)
Then, the estimation error of the modal weights is
-1 -0.5 0 0.5 1
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Displ.mode shapes 1-3
-1 -0.5 0 0.5 1
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
Curv.mode shapes 1-3

Chapter 2
36
1( ) ( ) ( )T Te t t (2.19)
Assuming the components of ( )t to be uncorrelated with equal variance 2 , then
the covariance matrix E of the estimation error becomes
1 1 1 2( ) [( ) }] ( )T T T T T T T TE ee E (2.20)
Here, E means the statistical expectation. The diagonal elements of matrix are the
variances of the estimation errors of the modal weights:
1 2 3
2 2 2, , ,... ( )e e e diag (2.21)
2 2( )nn eE w t (2.22)
With regard to the reconstruction error induced by using curvature measurement to
identify the low modes riser VIV motion, an example will be given in chapter 4 to
demonstrate it.
2.4.3 Error analysis of unreasonable choice of participating modes
When using the modal approach to reconstruct riser VIV motion, one of the
important steps is to choose the participating modes. The reconstructed result depends
largely on how many and which modes to be included. If the participating modes are
decided from 1 to the maximum accepted mode number, i.e. the number of points on the
riser with sensor, sometimes the reconstruction error will arise due to the participation of
spurious higher or lower modes. That is to say, in the case that the natural frequencies
corresponding to low modes are quite lower than reasonable Strouhal frequency or the
natural frequencies of high modes are far higher than it, these lower or higher modes are
not supposed to enter into the system matrix.
In terms of the reconstruction error induced by the unreasonable way of choosing
participating modes, an example will be given in chapter 6 to demonstrate it.

Chapter 2
37
Chapter 3
38
Chapter 3
3 The ExxonMobil and second Gulf
Stream VIV tests
3.1 Introduction
In the past few decades, a lot of VIV tests using long flexible riser had been
conducted in both the well controlled laboratory and hard controlled field, and they are
briefly introduced in chapter 1. According to the title of my graduation project, one
experimental VIV test and one field VIV test are needed to be picked. The VIV test data
are the prerequisite for doing riser VIV response reconstruction and only the complete
and clear test data for ExxonMobil and the second Gulf Stream VIV tests could be
obtained in Vortex Induced Vibration Data Repository (MIT, 2007) [24]. Besides, after
searching and browsing relevant papers on the internet, it is very lucky that riser VIV
response reconstruction with regard to these two tests have not been done so far.
Therefore, these two tests are selected as my targets.
3.2 ExxonMobil VIV test
The detailed information of ExxonMobil VIV test can be found from the test report by
Tognarelli and Lie, 2003 [25].
3.2.1 Background
In June 2003, ExxonMobil performed vortex-induced vibration (VIV) testing on a
long flexible riser model in the 10m-deep towing tank at the Norwegian Marine
Technology Research Institute (MARINTEK) in Trondheim, Norway.
Chapter 3
39
The riser model, with or without suppression devices, was tested both vertically and
in inclined positions in a rotating rig in order to obtain uniform and linearly varying
sheared current. The riser model was heavily instrumented to obtain signals of bending
strain and lateral acceleration in both cross-flow and in-line directions.
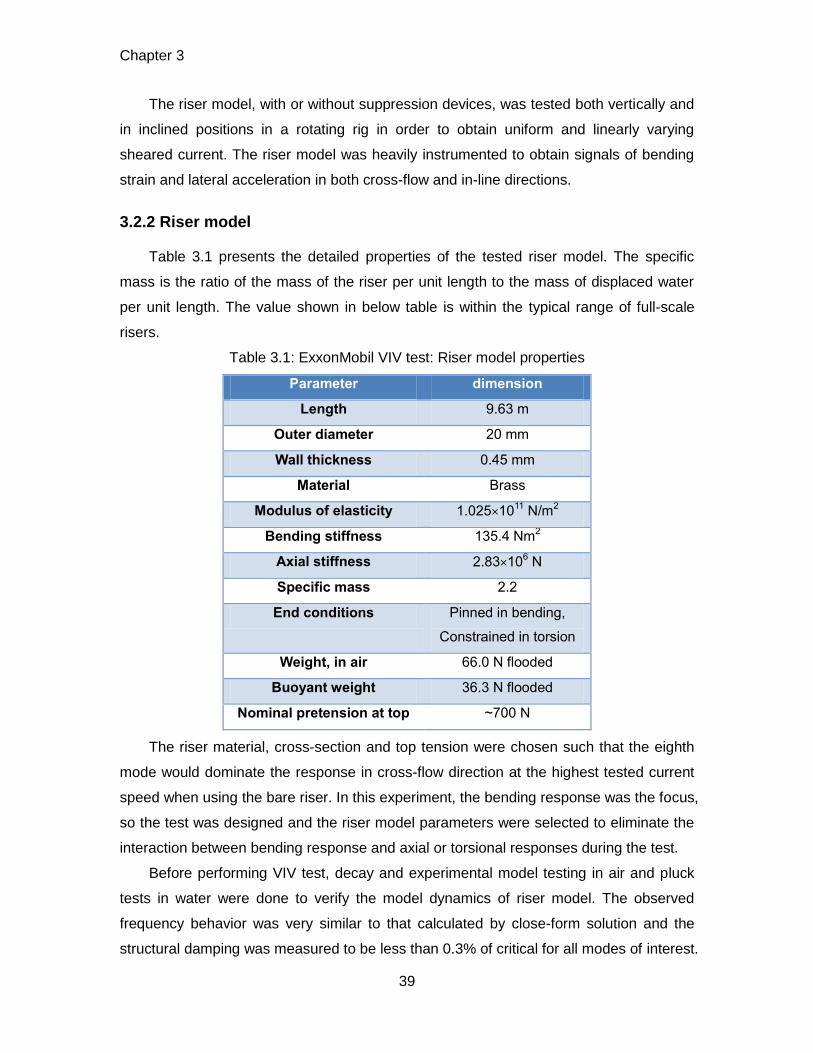
3.2.2 Riser model
Table 3.1 presents the detailed properties of the tested riser model. The specific
mass is the ratio of the mass of the riser per unit length to the mass of displaced water
per unit length. The value shown in below table is within the typical range of full-scale
risers.
Table 3.1: ExxonMobil VIV test: Riser model properties
Parameter dimension
Length 9.63 m
Outer diameter 20 mm
Wall thickness 0.45 mm
Material Brass
Modulus of elasticity 1.0251011
N/m2
Bending stiffness 135.4 Nm2
Axial stiffness 2.83106 N
Specific mass 2.2
End conditions Pinned in bending,
Constrained in torsion
Weight, in air 66.0 N flooded
Buoyant weight 36.3 N flooded
Nominal pretension at top ~700 N
The riser material, cross-section and top tension were chosen such that the eighth
mode would dominate the response in cross-flow direction at the highest tested current
speed when using the bare riser. In this experiment, the bending response was the focus,
so the test was designed and the riser model parameters were selected to eliminate the
interaction between bending response and axial or torsional responses during the test.
Before performing VIV test, decay and experimental model testing in air and pluck
tests in water were done to verify the model dynamics of riser model. The observed
frequency behavior was very similar to that calculated by close-form solution and the
structural damping was measured to be less than 0.3% of critical for all modes of interest.
Chapter 3
40
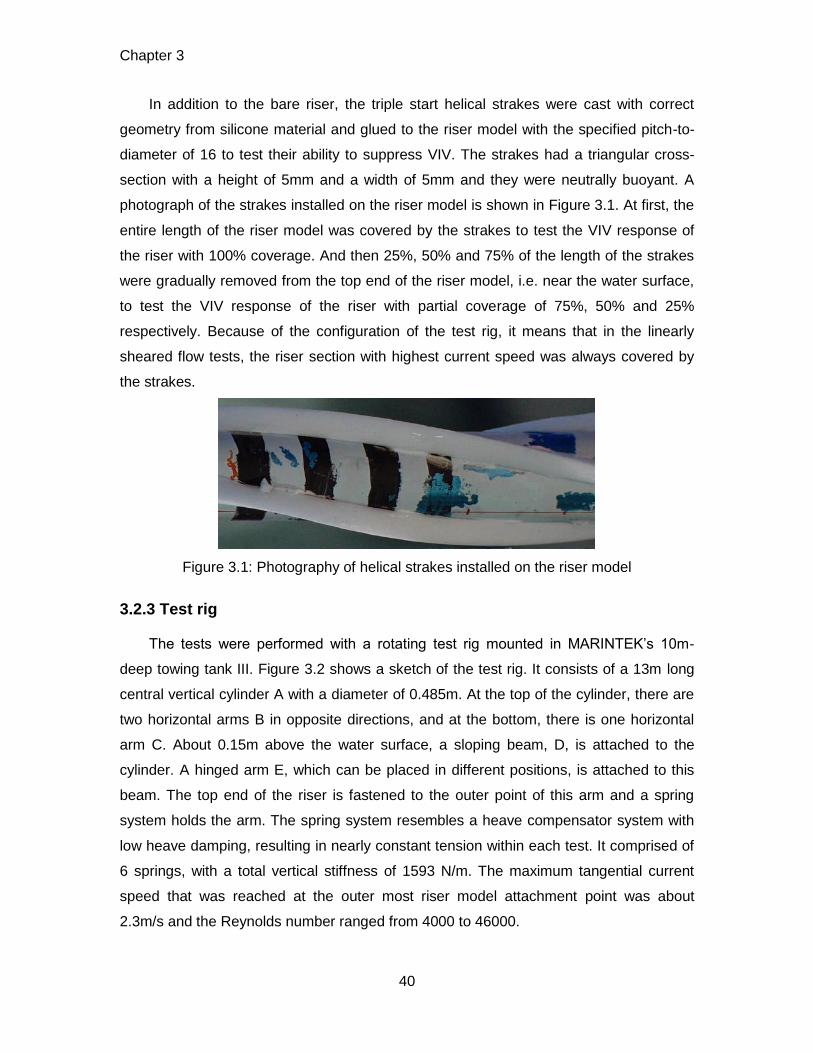
In addition to the bare riser, the triple start helical strakes were cast with correct
geometry from silicone material and glued to the riser model with the specified pitch-to-
diameter of 16 to test their ability to suppress VIV. The strakes had a triangular cross-
section with a height of 5mm and a width of 5mm and they were neutrally buoyant. A
photograph of the strakes installed on the riser model is shown in Figure 3.1. At first, the
entire length of the riser model was covered by the strakes to test the VIV response of
the riser with 100% coverage. And then 25%, 50% and 75% of the length of the strakes
were gradually removed from the top end of the riser model, i.e. near the water surface,
to test the VIV response of the riser with partial coverage of 75%, 50% and 25%
respectively. Because of the configuration of the test rig, it means that in the linearly
sheared flow tests, the riser section with highest current speed was always covered by
the strakes.
Figure 3.1: Photography of helical strakes installed on the riser model
3.2.3 Test rig
The tests were performed with a rotating test rig mounted in MARINTEK’s 10m-
deep towing tank III. Figure 3.2 shows a sketch of the test rig. It consists of a 13m long
central vertical cylinder A with a diameter of 0.485m. At the top of the cylinder, there are
two horizontal arms B in opposite directions, and at the bottom, there is one horizontal
arm C. About 0.15m above the water surface, a sloping beam, D, is attached to the
cylinder. A hinged arm E, which can be placed in different positions, is attached to this
beam. The top end of the riser is fastened to the outer point of this arm and a spring
system holds the arm. The spring system resembles a heave compensator system with
low heave damping, resulting in nearly constant tension within each test. It comprised of
6 springs, with a total vertical stiffness of 1593 N/m. The maximum tangential current
speed that was reached at the outer most riser model attachment point was about
2.3m/s and the Reynolds number ranged from 4000 to 46000.
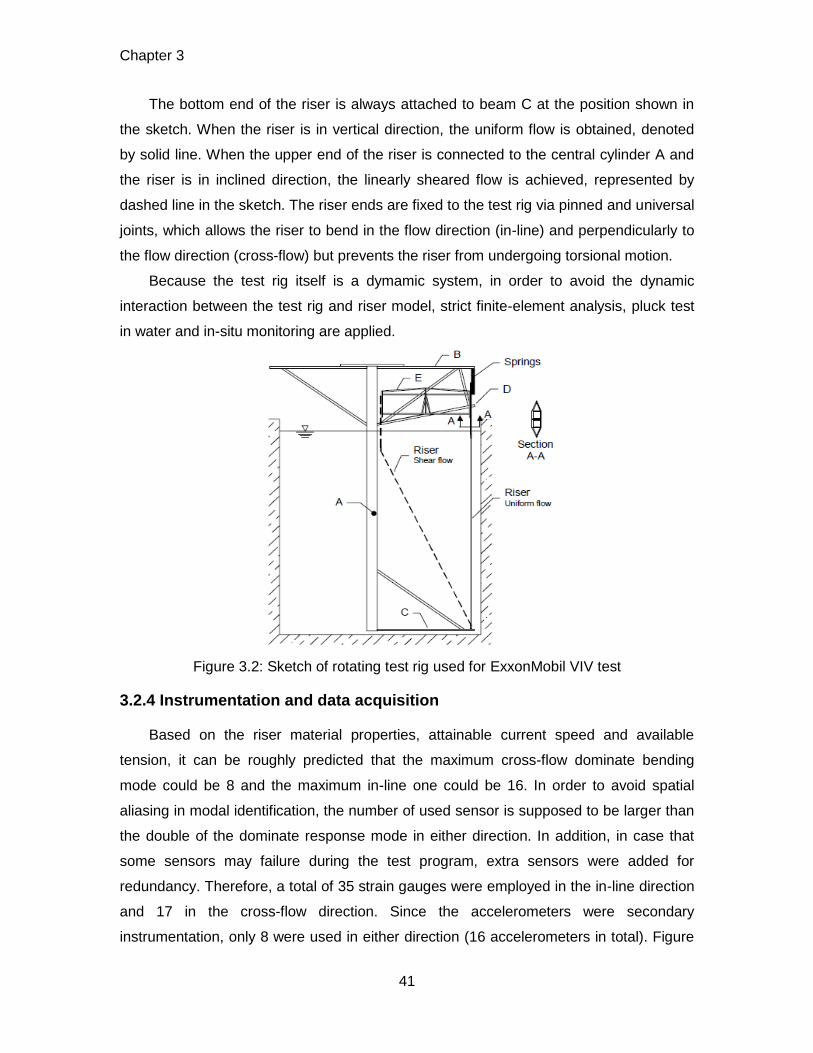
Chapter 3
41
The bottom end of the riser is always attached to beam C at the position shown in
the sketch. When the riser is in vertical direction, the uniform flow is obtained, denoted
by solid line. When the upper end of the riser is connected to the central cylinder A and
the riser is in inclined direction, the linearly sheared flow is achieved, represented by
dashed line in the sketch. The riser ends are fixed to the test rig via pinned and universal
joints, which allows the riser to bend in the flow direction (in-line) and perpendicularly to
the flow direction (cross-flow) but prevents the riser from undergoing torsional motion.
Because the test rig itself is a dymamic system, in order to avoid the dynamic
interaction between the test rig and riser model, strict finite-element analysis, pluck test
in water and in-situ monitoring are applied.
Figure 3.2: Sketch of rotating test rig used for ExxonMobil VIV test
3.2.4 Instrumentation and data acquisition
Based on the riser material properties, attainable current speed and available
tension, it can be roughly predicted that the maximum cross-flow dominate bending
mode could be 8 and the maximum in-line one could be 16. In order to avoid spatial
aliasing in modal identification, the number of used sensor is supposed to be larger than
the double of the dominate response mode in either direction. In addition, in case that
some sensors may failure during the test program, extra sensors were added for
redundancy. Therefore, a total of 35 strain gauges were employed in the in-line direction
and 17 in the cross-flow direction. Since the accelerometers were secondary
instrumentation, only 8 were used in either direction (16 accelerometers in total). Figure
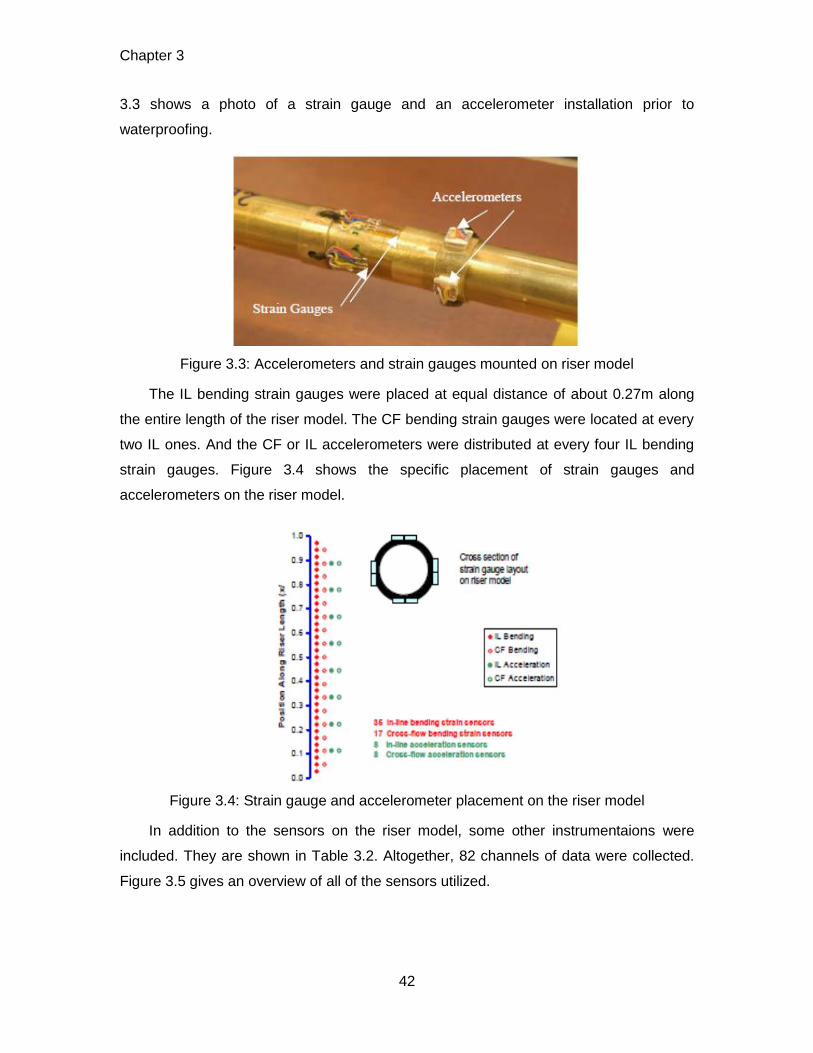
Chapter 3
42
3.3 shows a photo of a strain gauge and an accelerometer installation prior to
waterproofing.
Figure 3.3: Accelerometers and strain gauges mounted on riser model
The IL bending strain gauges were placed at equal distance of about 0.27m along
the entire length of the riser model. The CF bending strain gauges were located at every
two IL ones. And the CF or IL accelerometers were distributed at every four IL bending
strain gauges. Figure 3.4 shows the specific placement of strain gauges and
accelerometers on the riser model.
Figure 3.4: Strain gauge and accelerometer placement on the riser model
In addition to the sensors on the riser model, some other instrumentaions were
included. They are shown in Table 3.2. Altogether, 82 channels of data were collected.
Figure 3.5 gives an overview of all of the sensors utilized.
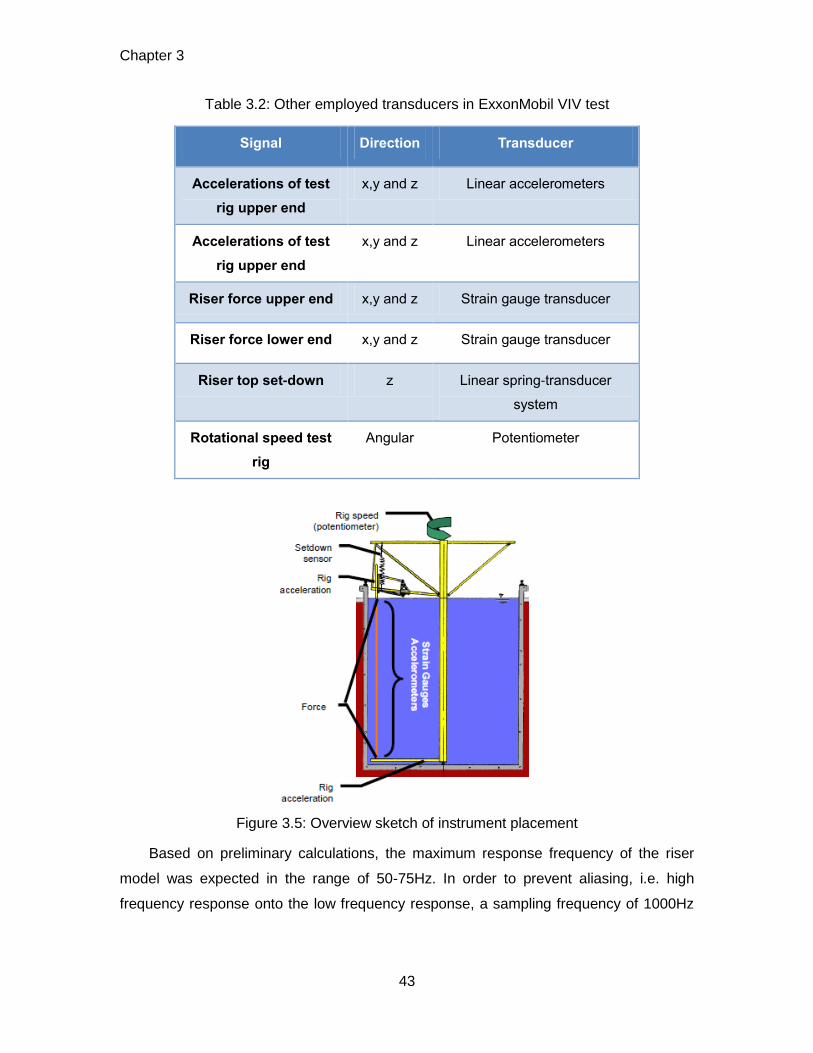
Chapter 3
43
Table 3.2: Other employed transducers in ExxonMobil VIV test
Signal Direction Transducer
Accelerations of test
rig upper end
x,y and z Linear accelerometers
Accelerations of test
rig upper end
x,y and z Linear accelerometers
Riser force upper end x,y and z Strain gauge transducer
Riser force lower end x,y and z Strain gauge transducer
Riser top set-down z Linear spring-transducer
system
Rotational speed test
rig
Angular Potentiometer
Figure 3.5: Overview sketch of instrument placement
Based on preliminary calculations, the maximum response frequency of the riser
model was expected in the range of 50-75Hz. In order to prevent aliasing, i.e. high
frequency response onto the low frequency response, a sampling frequency of 1000Hz
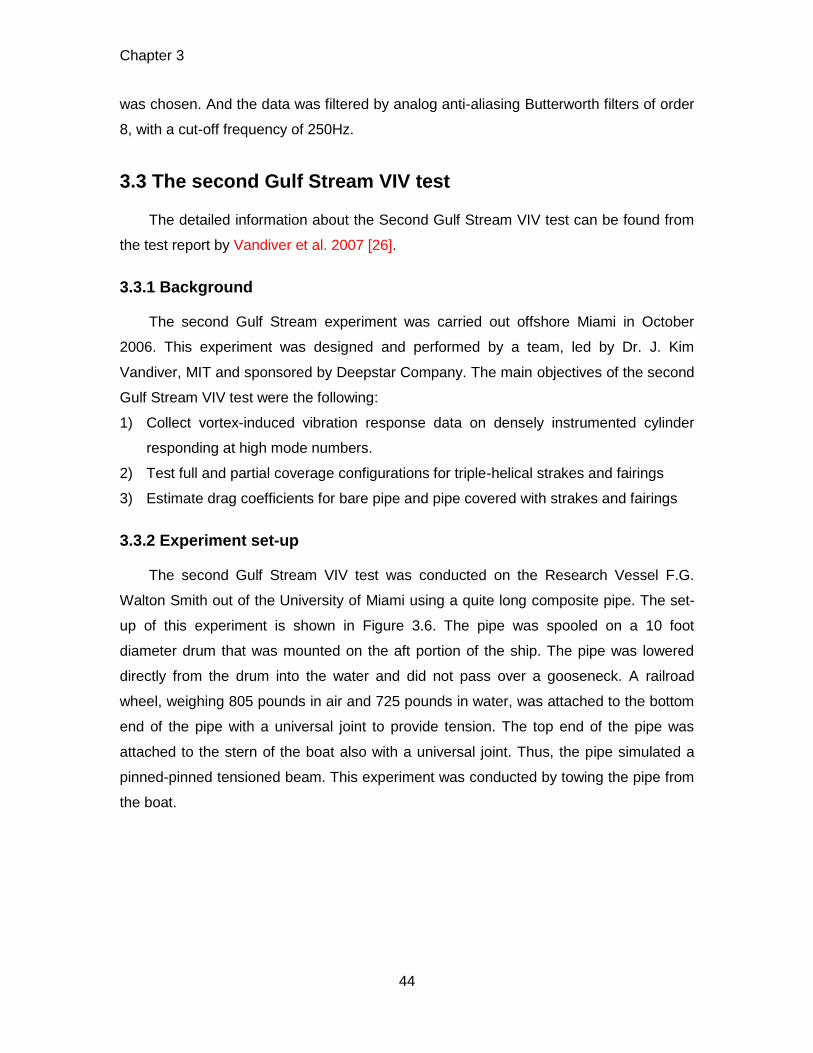
Chapter 3
44
was chosen. And the data was filtered by analog anti-aliasing Butterworth filters of order
8, with a cut-off frequency of 250Hz.
3.3 The second Gulf Stream VIV test
The detailed information about the Second Gulf Stream VIV test can be found from
the test report by Vandiver et al. 2007 [26].
3.3.1 Background
The second Gulf Stream experiment was carried out offshore Miami in October
2006. This experiment was designed and performed by a team, led by Dr. J. Kim
Vandiver, MIT and sponsored by Deepstar Company. The main objectives of the second
Gulf Stream VIV test were the following:
1) Collect vortex-induced vibration response data on densely instrumented cylinder
responding at high mode numbers.
2) Test full and partial coverage configurations for triple-helical strakes and fairings
3) Estimate drag coefficients for bare pipe and pipe covered with strakes and fairings
3.3.2 Experiment set-up
The second Gulf Stream VIV test was conducted on the Research Vessel F.G.
Walton Smith out of the University of Miami using a quite long composite pipe. The set-
up of this experiment is shown in Figure 3.6. The pipe was spooled on a 10 foot
diameter drum that was mounted on the aft portion of the ship. The pipe was lowered
directly from the drum into the water and did not pass over a gooseneck. A railroad
wheel, weighing 805 pounds in air and 725 pounds in water, was attached to the bottom
end of the pipe with a universal joint to provide tension. The top end of the pipe was
attached to the stern of the boat also with a universal joint. Thus, the pipe simulated a
pinned-pinned tensioned beam. This experiment was conducted by towing the pipe from
the boat.
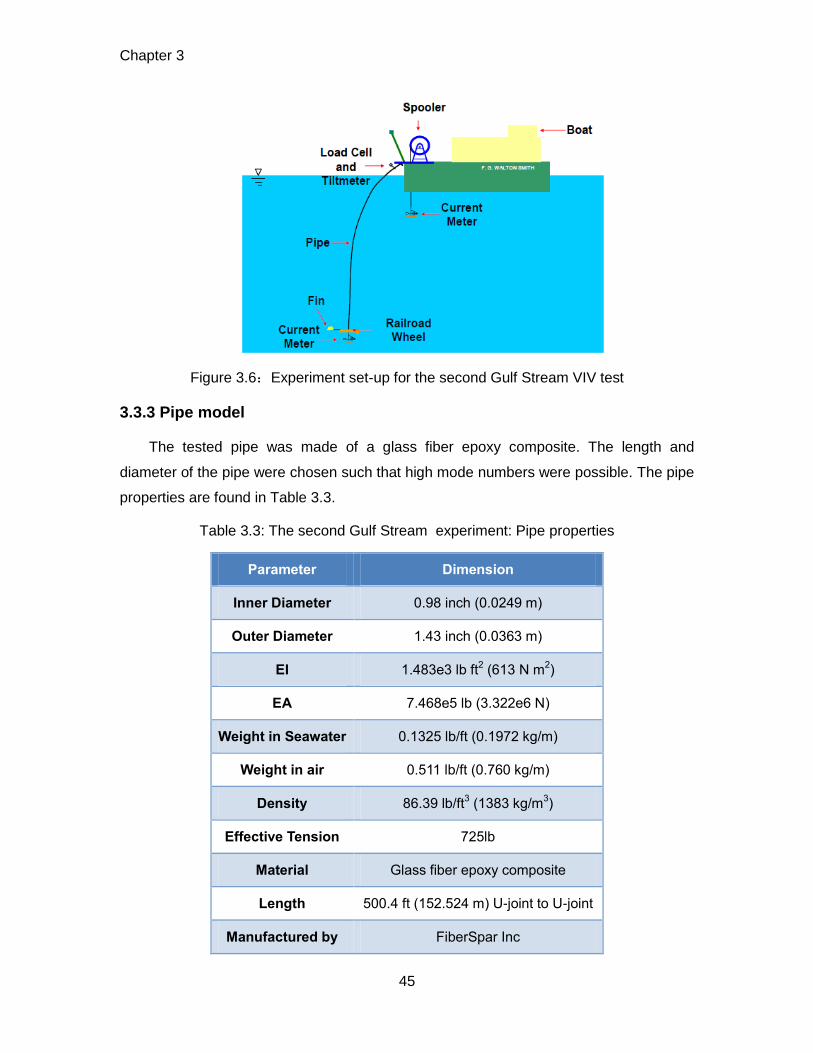
Chapter 3
45
Figure 3.6:Experiment set-up for the second Gulf Stream VIV test
3.3.3 Pipe model
The tested pipe was made of a glass fiber epoxy composite. The length and
diameter of the pipe were chosen such that high mode numbers were possible. The pipe
properties are found in Table 3.3.
Table 3.3: The second Gulf Stream experiment: Pipe properties
Parameter Dimension
Inner Diameter 0.98 inch (0.0249 m)
Outer Diameter 1.43 inch (0.0363 m)
EI 1.483e3 lb ft2 (613 N m
2)
EA 7.468e5 lb (3.322e6 N)
Weight in Seawater 0.1325 lb/ft (0.1972 kg/m)
Weight in air 0.511 lb/ft (0.760 kg/m)
Density 86.39 lb/ft3 (1383 kg/m
3)
Effective Tension 725lb
Material Glass fiber epoxy composite
Length 500.4 ft (152.524 m) U-joint to U-joint
Manufactured by FiberSpar Inc
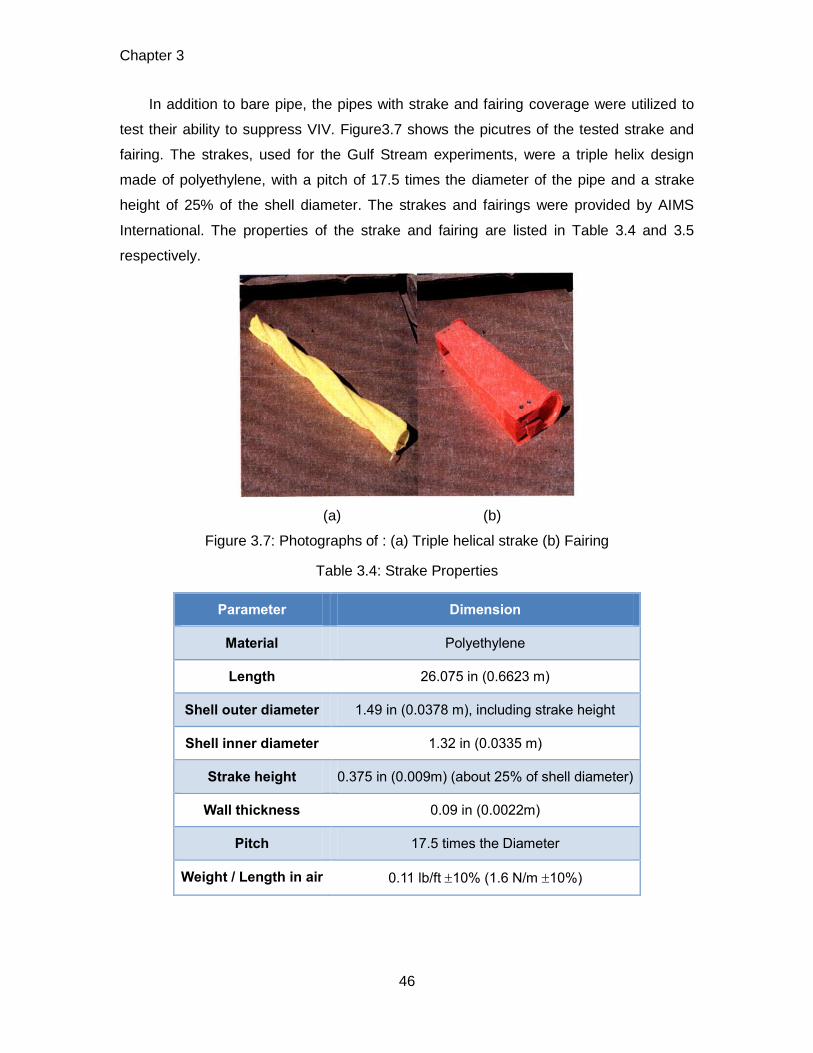
Chapter 3
46
In addition to bare pipe, the pipes with strake and fairing coverage were utilized to
test their ability to suppress VIV. Figure3.7 shows the picutres of the tested strake and
fairing. The strakes, used for the Gulf Stream experiments, were a triple helix design
made of polyethylene, with a pitch of 17.5 times the diameter of the pipe and a strake
height of 25% of the shell diameter. The strakes and fairings were provided by AIMS
International. The properties of the strake and fairing are listed in Table 3.4 and 3.5
respectively.
(a) (b)
Figure 3.7: Photographs of : (a) Triple helical strake (b) Fairing
Table 3.4: Strake Properties
Parameter Dimension
Material Polyethylene
Length 26.075 in (0.6623 m)
Shell outer diameter 1.49 in (0.0378 m), including strake height
Shell inner diameter 1.32 in (0.0335 m)
Strake height 0.375 in (0.009m) (about 25% of shell diameter)
Wall thickness 0.09 in (0.0022m)
Pitch 17.5 times the Diameter
Weight / Length in air 0.11 lb/ft 10% (1.6 N/m 10%)
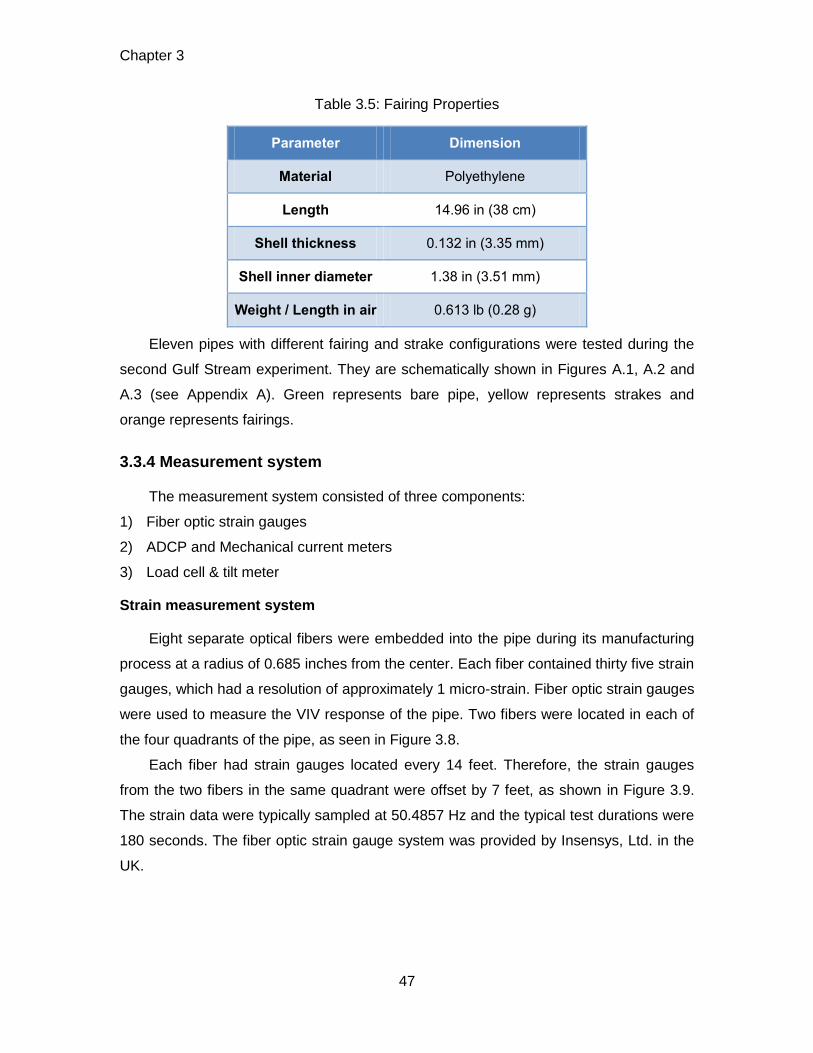
Chapter 3
47
Table 3.5: Fairing Properties
Parameter Dimension
Material Polyethylene
Length 14.96 in (38 cm)
Shell thickness 0.132 in (3.35 mm)
Shell inner diameter 1.38 in (3.51 mm)
Weight / Length in air 0.613 lb (0.28 g)
Eleven pipes with different fairing and strake configurations were tested during the
second Gulf Stream experiment. They are schematically shown in Figures A.1, A.2 and
A.3 (see Appendix A). Green represents bare pipe, yellow represents strakes and
orange represents fairings.
3.3.4 Measurement system
The measurement system consisted of three components:
1) Fiber optic strain gauges
2) ADCP and Mechanical current meters
3) Load cell & tilt meter
Strain measurement system
Eight separate optical fibers were embedded into the pipe during its manufacturing
process at a radius of 0.685 inches from the center. Each fiber contained thirty five strain
gauges, which had a resolution of approximately 1 micro-strain. Fiber optic strain gauges
were used to measure the VIV response of the pipe. Two fibers were located in each of
the four quadrants of the pipe, as seen in Figure 3.8.
Each fiber had strain gauges located every 14 feet. Therefore, the strain gauges
from the two fibers in the same quadrant were offset by 7 feet, as shown in Figure 3.9.
The strain data were typically sampled at 50.4857 Hz and the typical test durations were
180 seconds. The fiber optic strain gauge system was provided by Insensys, Ltd. in the
UK.
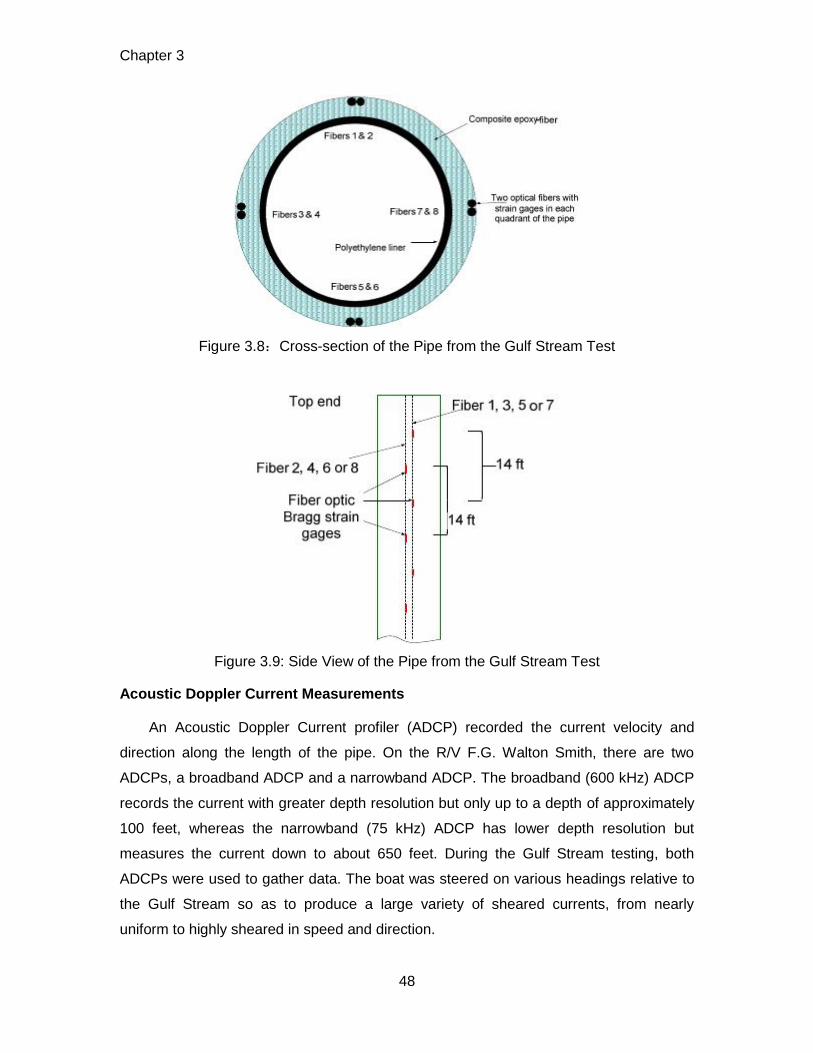
Chapter 3
48
Figure 3.8:Cross-section of the Pipe from the Gulf Stream Test
Figure 3.9: Side View of the Pipe from the Gulf Stream Test
Acoustic Doppler Current Measurements
An Acoustic Doppler Current profiler (ADCP) recorded the current velocity and
direction along the length of the pipe. On the R/V F.G. Walton Smith, there are two
ADCPs, a broadband ADCP and a narrowband ADCP. The broadband (600 kHz) ADCP
records the current with greater depth resolution but only up to a depth of approximately
100 feet, whereas the narrowband (75 kHz) ADCP has lower depth resolution but
measures the current down to about 650 feet. During the Gulf Stream testing, both
ADCPs were used to gather data. The boat was steered on various headings relative to
the Gulf Stream so as to produce a large variety of sheared currents, from nearly
uniform to highly sheared in speed and direction.
Chapter 3
49
Mechanical current meters were also used at the surface and approximately 5 feet
below the railroad wheel. These mechanical current meters were used to verify the
ADCP and, in most cases, showed a good match to the ADCP measured current values.
Load cell and tilt meter
In addition, a tilt meter was used to measure the inclination at the top of the pipe
and a load cell was used to measure the tension at the top of the pipe, as seen in Figure
3.6.
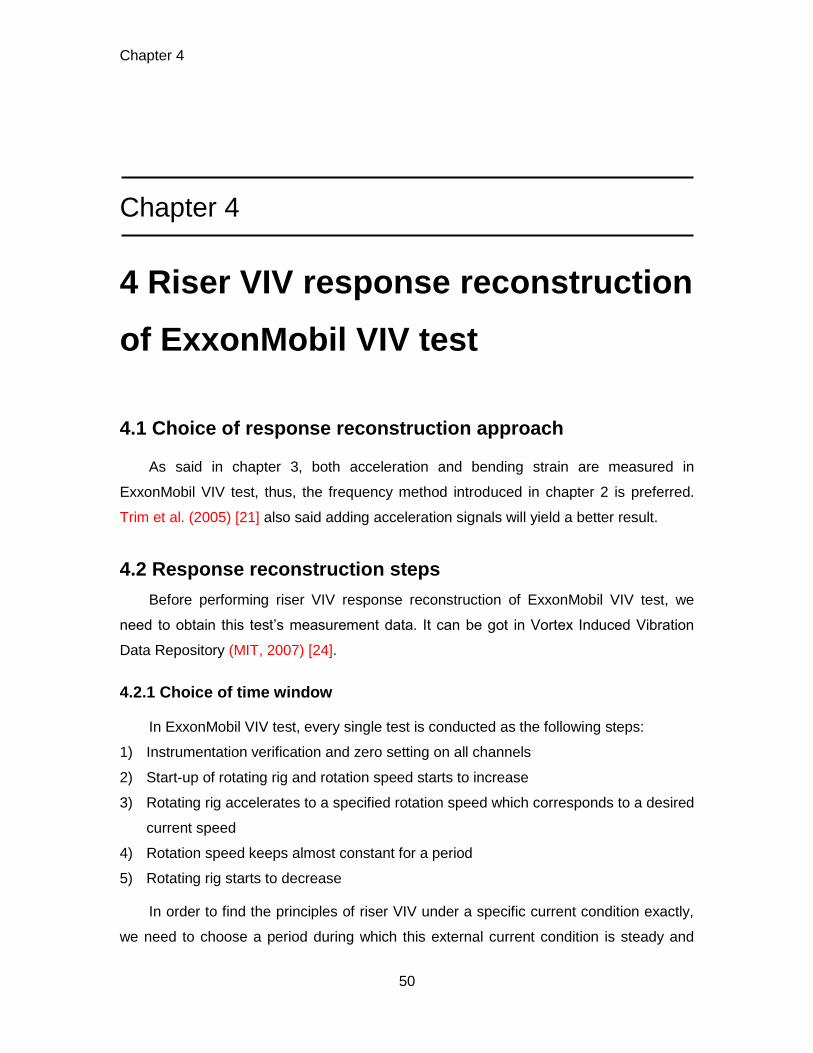
Chapter 4
50
Chapter 4
4 Riser VIV response reconstruction
of ExxonMobil VIV test
4.1 Choice of response reconstruction approach
As said in chapter 3, both acceleration and bending strain are measured in
ExxonMobil VIV test, thus, the frequency method introduced in chapter 2 is preferred.
Trim et al. (2005) [21] also said adding acceleration signals will yield a better result.
4.2 Response reconstruction steps
Before performing riser VIV response reconstruction of ExxonMobil VIV test, we
need to obtain this test’s measurement data. It can be got in Vortex Induced Vibration
Data Repository (MIT, 2007) [24].
4.2.1 Choice of time window
In ExxonMobil VIV test, every single test is conducted as the following steps:
1) Instrumentation verification and zero setting on all channels
2) Start-up of rotating rig and rotation speed starts to increase
3) Rotating rig accelerates to a specified rotation speed which corresponds to a desired
current speed
4) Rotation speed keeps almost constant for a period
5) Rotating rig starts to decrease
In order to find the principles of riser VIV under a specific current condition exactly,
we need to choose a period during which this external current condition is steady and
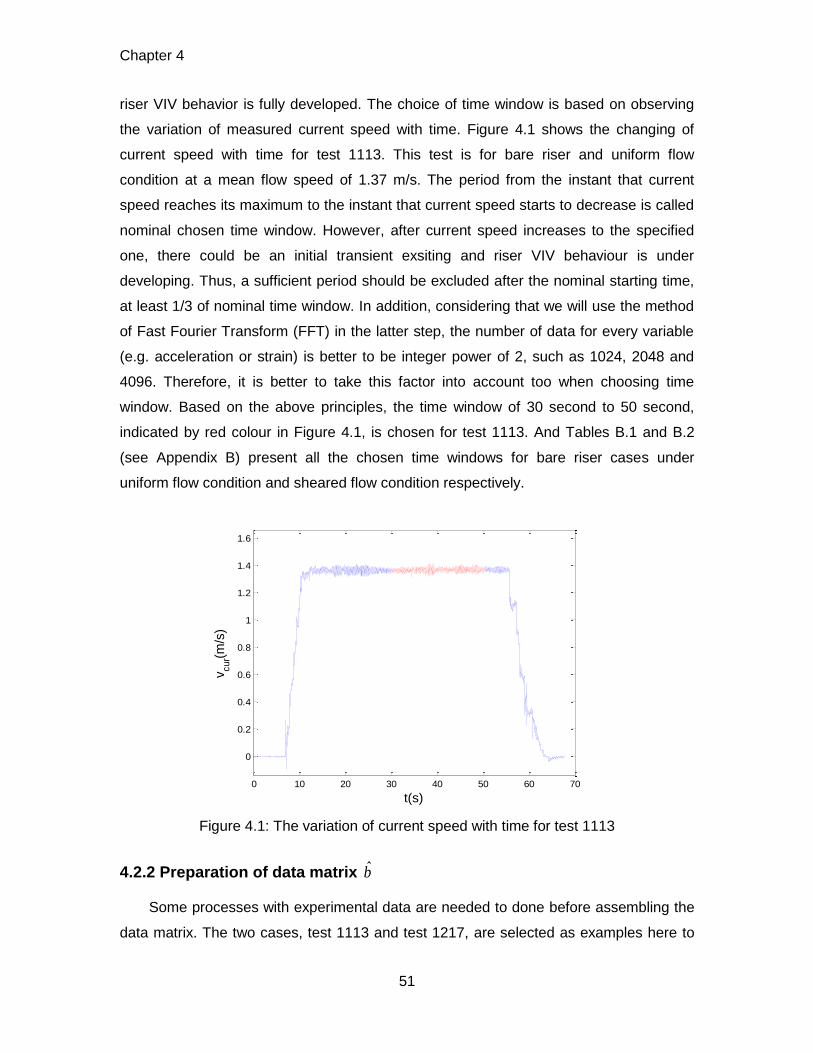
Chapter 4
51
riser VIV behavior is fully developed. The choice of time window is based on observing
the variation of measured current speed with time. Figure 4.1 shows the changing of
current speed with time for test 1113. This test is for bare riser and uniform flow
condition at a mean flow speed of 1.37 m/s. The period from the instant that current
speed reaches its maximum to the instant that current speed starts to decrease is called
nominal chosen time window. However, after current speed increases to the specified
one, there could be an initial transient exsiting and riser VIV behaviour is under
developing. Thus, a sufficient period should be excluded after the nominal starting time,
at least 1/3 of nominal time window. In addition, considering that we will use the method
of Fast Fourier Transform (FFT) in the latter step, the number of data for every variable
(e.g. acceleration or strain) is better to be integer power of 2, such as 1024, 2048 and
4096. Therefore, it is better to take this factor into account too when choosing time
window. Based on the above principles, the time window of 30 second to 50 second,
indicated by red colour in Figure 4.1, is chosen for test 1113. And Tables B.1 and B.2
(see Appendix B) present all the chosen time windows for bare riser cases under
uniform flow condition and sheared flow condition respectively.
Figure 4.1: The variation of current speed with time for test 1113
4.2.2 Preparation of data matrix b
Some processes with experimental data are needed to done before assembling the
data matrix. The two cases, test 1113 and test 1217, are selected as examples here to
0 10 20 30 40 50 60 70
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t(s)
vcur(m
/s)
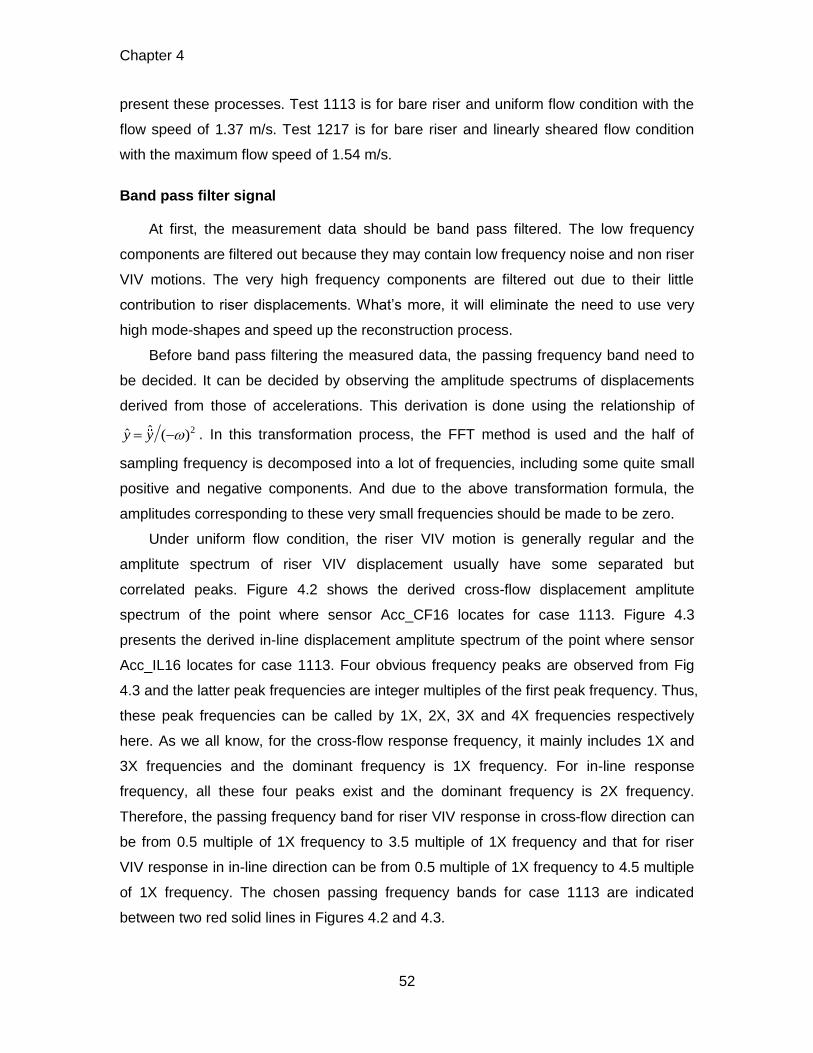
Chapter 4
52
present these processes. Test 1113 is for bare riser and uniform flow condition with the
flow speed of 1.37 m/s. Test 1217 is for bare riser and linearly sheared flow condition
with the maximum flow speed of 1.54 m/s.
Band pass filter signal
At first, the measurement data should be band pass filtered. The low frequency
components are filtered out because they may contain low frequency noise and non riser
VIV motions. The very high frequency components are filtered out due to their little
contribution to riser displacements. What’s more, it will eliminate the need to use very
high mode-shapes and speed up the reconstruction process.
Before band pass filtering the measured data, the passing frequency band need to
be decided. It can be decided by observing the amplitude spectrums of displacements
derived from those of accelerations. This derivation is done using the relationship of
2ˆˆ ( )y y . In this transformation process, the FFT method is used and the half of
sampling frequency is decomposed into a lot of frequencies, including some quite small
positive and negative components. And due to the above transformation formula, the
amplitudes corresponding to these very small frequencies should be made to be zero.
Under uniform flow condition, the riser VIV motion is generally regular and the
amplitute spectrum of riser VIV displacement usually have some separated but
correlated peaks. Figure 4.2 shows the derived cross-flow displacement amplitute
spectrum of the point where sensor Acc_CF16 locates for case 1113. Figure 4.3
presents the derived in-line displacement amplitute spectrum of the point where sensor
Acc_IL16 locates for case 1113. Four obvious frequency peaks are observed from Fig
4.3 and the latter peak frequencies are integer multiples of the first peak frequency. Thus,
these peak frequencies can be called by 1X, 2X, 3X and 4X frequencies respectively
here. As we all know, for the cross-flow response frequency, it mainly includes 1X and
3X frequencies and the dominant frequency is 1X frequency. For in-line response
frequency, all these four peaks exist and the dominant frequency is 2X frequency.
Therefore, the passing frequency band for riser VIV response in cross-flow direction can
be from 0.5 multiple of 1X frequency to 3.5 multiple of 1X frequency and that for riser
VIV response in in-line direction can be from 0.5 multiple of 1X frequency to 4.5 multiple
of 1X frequency. The chosen passing frequency bands for case 1113 are indicated
between two red solid lines in Figures 4.2 and 4.3.
Chapter 4
53
Figure 4.2: The derived cross-flow displacement amplitute spectrum of the point where sensor Acc_CF16 locates for case 1113
Figure 4.3: The derived in-line displacement amplitute spectrum of the point where sensor Acc_IL16 locates for case 1113
Under sheared flow condition, the riser VIV response is not as regular as that under
uniform flow condition. Especially when lock-in does not happen, the riser VIV response
may contain the natural frequencies of riser plus the frequencies of vortex-shedding.
Figure 4.4 shows the derived cross-flow displacement amplitute spectrum of the point
where sensor Acc_CF08 locates for case 1217. Figure 4.5 presents the derived in-line
displacement amplitute spectrum of the point where sensor Acc_IL08 locates for case
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4x 10
-3
f [Hz]
y(
) [m
]
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1x 10
-3
f [Hz]
x(
) [m
]
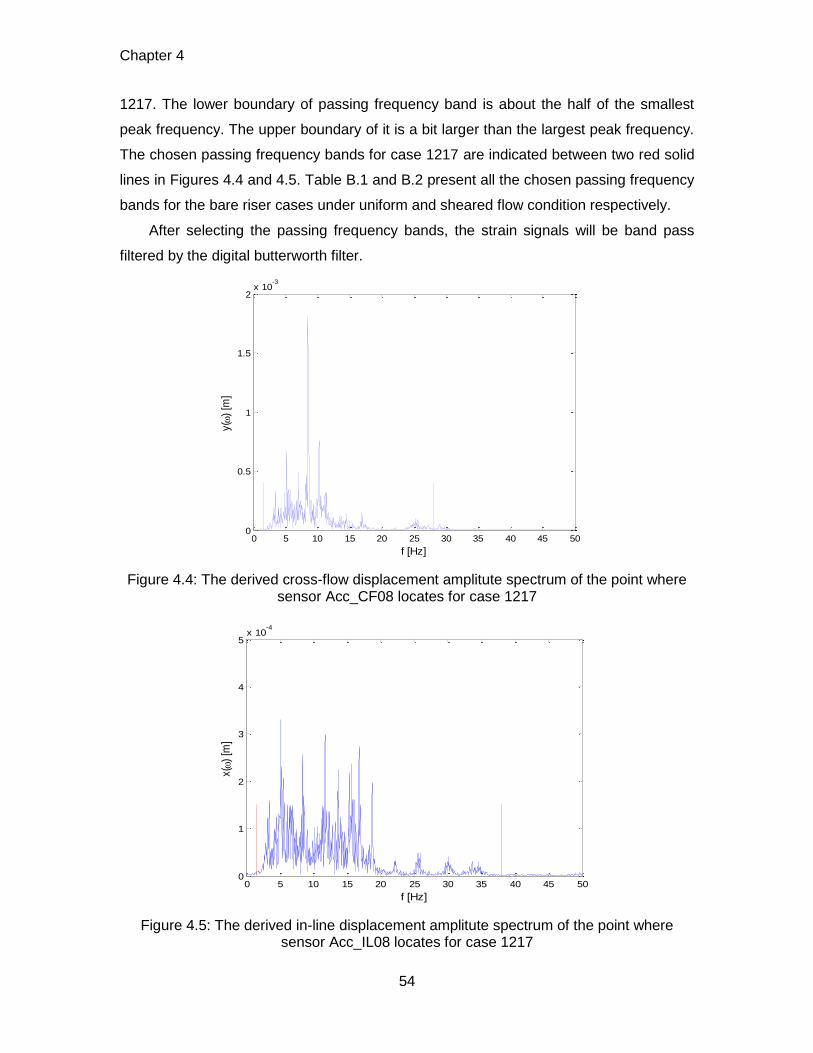
Chapter 4
54
1217. The lower boundary of passing frequency band is about the half of the smallest
peak frequency. The upper boundary of it is a bit larger than the largest peak frequency.
The chosen passing frequency bands for case 1217 are indicated between two red solid
lines in Figures 4.4 and 4.5. Table B.1 and B.2 present all the chosen passing frequency
bands for the bare riser cases under uniform and sheared flow condition respectively.
After selecting the passing frequency bands, the strain signals will be band pass
filtered by the digital butterworth filter.
Figure 4.4: The derived cross-flow displacement amplitute spectrum of the point where sensor Acc_CF08 locates for case 1217
Figure 4.5: The derived in-line displacement amplitute spectrum of the point where sensor Acc_IL08 locates for case 1217
0 5 10 15 20 25 30 35 40 45 500
0.5
1
1.5
2x 10
-3
f [Hz]
y(
) [m
]
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5x 10
-4
f [Hz]
x(
) [m
]

Chapter 4
55
Assemble data matrix b
Performing Fourier transform with the filtered strain signals and dividing the
submatrix by the riser outer radius R , it can be entered into the data matrix b . And
the derived submatrix y can be just put into the data matrix b .
4.2.3 Preparation of system matrix A
This section mainly includes two parts. One part is the choice of participating modes.
The other one is modifying the system matrix.
Choice of participating modes
Before selecting the participating modes, the natural frequencies of the riser in still
water need to be calculated at first. The riser in this experiment is like an axially
tensioned beam. Its governing equation of motion can be expressed as
2 4 2
2 2 2( ) 0a
w w wm m EI T
t z z
(4.1)
Where, m is riser mass per unit length, am is added mass per unit length, w is the
transverse displacement, E is the Young modulus, I is the moment of inertia of the
riser, T is the tension in the riser, z is vertical coordinate along the riser.
Because the boundary condition of the riser is pinned-pinned, the mode-shapes of
riser VIV displacement are sinusoidal and the transverse displacement can be given as
( , ) sin( )sin(2 )n
n zw z t A f t
L
(4.2)
Where, n is the mode number, L is the length of the riser, nf is natural frequency.
Substituting Equation (4.2) into Equation (4.1), the natural frequencies of the riser
can be obtained as
4 21
2 ( ) ( )n
a a
EI n T nf
m m L m m L
(4.3)
It can be observed from Equation (4.3) that the natural frequency of the tensioned
beam can be expressed by the natural frequency of non tensioned beam and that of
tensioned string without stiffness. Because
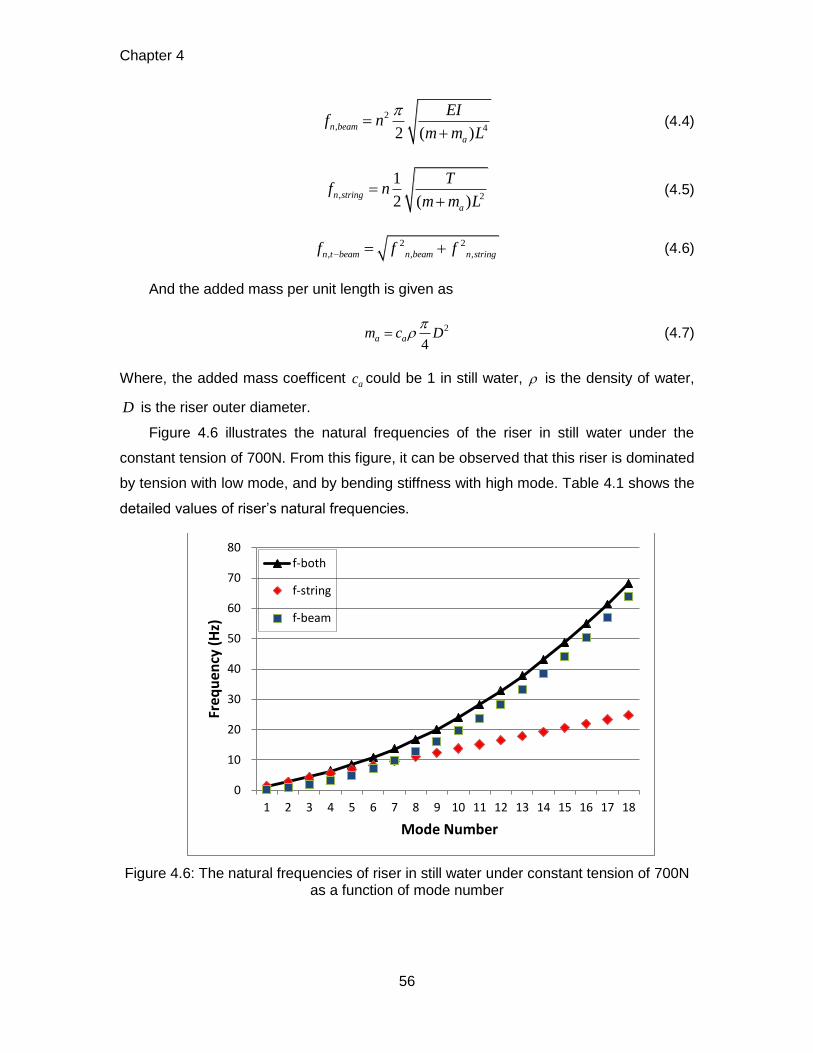
Chapter 4
56
2
, 42 ( )n beam
a
EIf n
m m L
(4.4)
, 2
1
2 ( )n string
a
Tf n
m m L
(4.5)
2 2
, , ,n t beam n beam n stringf f f (4.6)
And the added mass per unit length is given as
2
4a am c D
(4.7)
Where, the added mass coefficent ac could be 1 in still water, is the density of water,
D is the riser outer diameter.
Figure 4.6 illustrates the natural frequencies of the riser in still water under the
constant tension of 700N. From this figure, it can be observed that this riser is dominated
by tension with low mode, and by bending stiffness with high mode. Table 4.1 shows the
detailed values of riser’s natural frequencies.
Figure 4.6: The natural frequencies of riser in still water under constant tension of 700N as a function of mode number
0
10
20
30
40
50
60
70
80
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Freq
uen
cy (
Hz)
Mode Number
f-both
f-string
f-beam
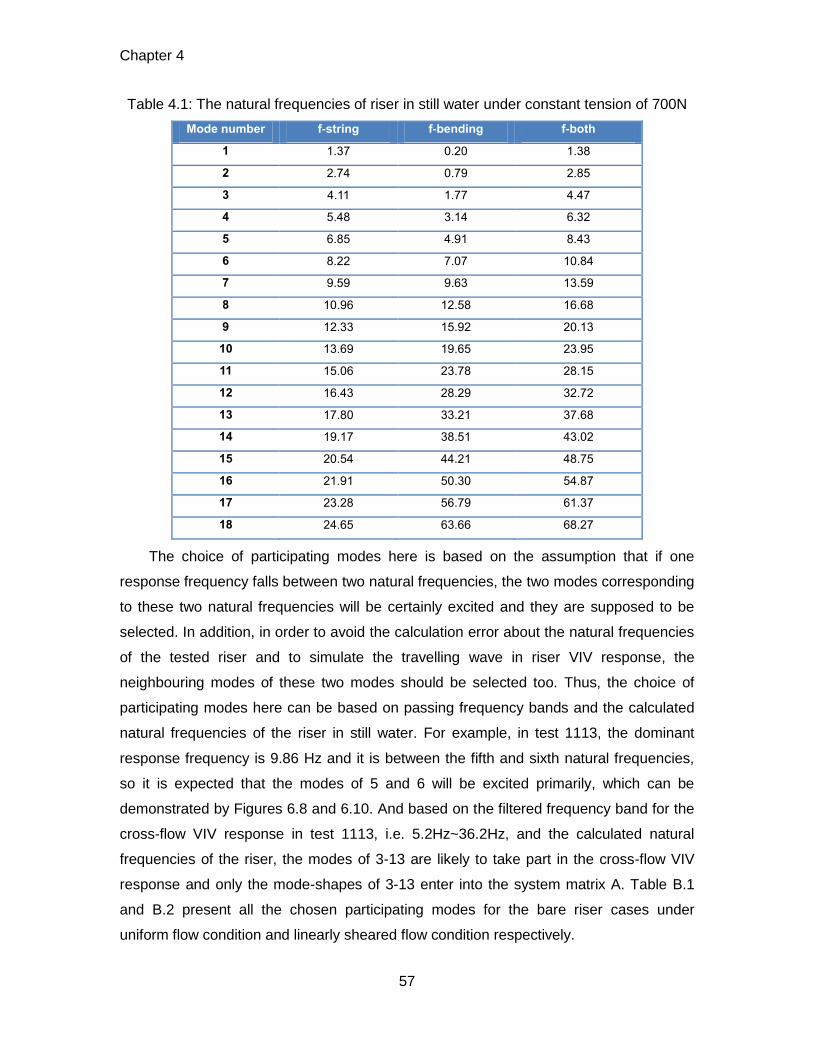
Chapter 4
57
Table 4.1: The natural frequencies of riser in still water under constant tension of 700N
Mode number f-string f-bending f-both
1 1.37 0.20 1.38
2 2.74 0.79 2.85
3 4.11 1.77 4.47
4 5.48 3.14 6.32
5 6.85 4.91 8.43
6 8.22 7.07 10.84
7 9.59 9.63 13.59
8 10.96 12.58 16.68
9 12.33 15.92 20.13
10 13.69 19.65 23.95
11 15.06 23.78 28.15
12 16.43 28.29 32.72
13 17.80 33.21 37.68
14 19.17 38.51 43.02
15 20.54 44.21 48.75
16 21.91 50.30 54.87
17 23.28 56.79 61.37
18 24.65 63.66 68.27
The choice of participating modes here is based on the assumption that if one
response frequency falls between two natural frequencies, the two modes corresponding
to these two natural frequencies will be certainly excited and they are supposed to be
selected. In addition, in order to avoid the calculation error about the natural frequencies
of the tested riser and to simulate the travelling wave in riser VIV response, the
neighbouring modes of these two modes should be selected too. Thus, the choice of
participating modes here can be based on passing frequency bands and the calculated
natural frequencies of the riser in still water. For example, in test 1113, the dominant
response frequency is 9.86 Hz and it is between the fifth and sixth natural frequencies,
so it is expected that the modes of 5 and 6 will be excited primarily, which can be
demonstrated by Figures 6.8 and 6.10. And based on the filtered frequency band for the
cross-flow VIV response in test 1113, i.e. 5.2Hz~36.2Hz, and the calculated natural
frequencies of the riser, the modes of 3-13 are likely to take part in the cross-flow VIV
response and only the mode-shapes of 3-13 enter into the system matrix A. Table B.1
and B.2 present all the chosen participating modes for the bare riser cases under
uniform flow condition and linearly sheared flow condition respectively.
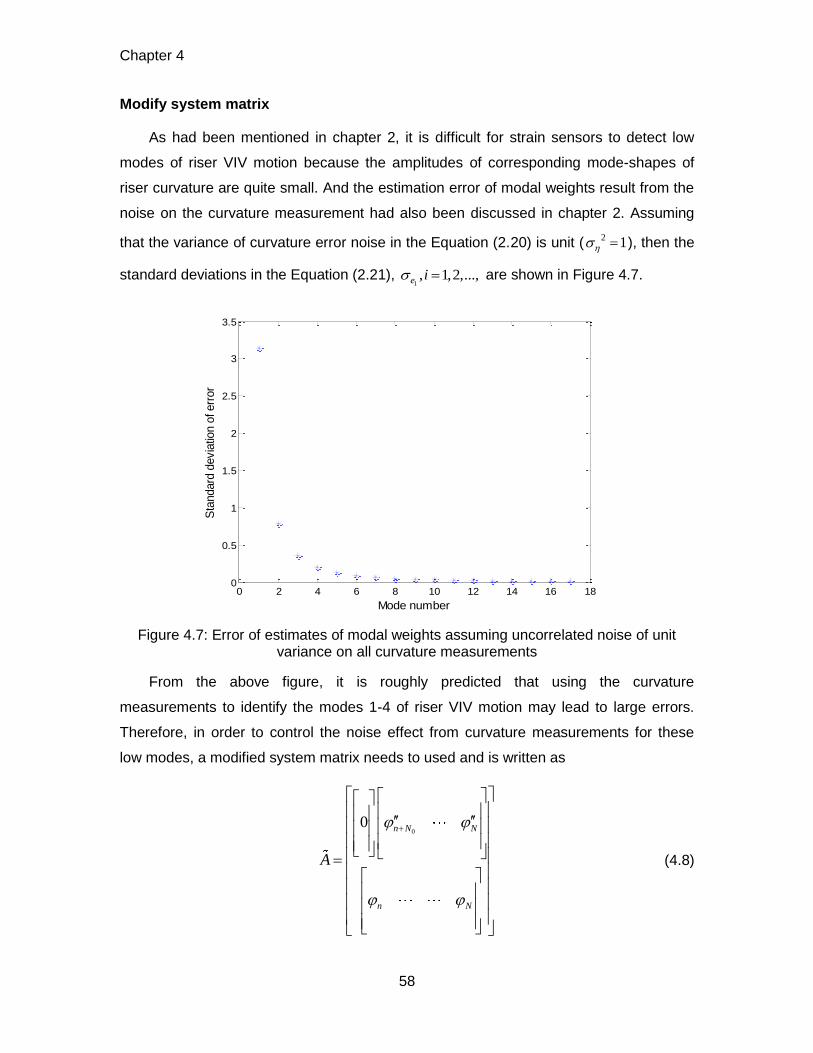
Chapter 4
58
Modify system matrix
As had been mentioned in chapter 2, it is difficult for strain sensors to detect low
modes of riser VIV motion because the amplitudes of corresponding mode-shapes of
riser curvature are quite small. And the estimation error of modal weights result from the
noise on the curvature measurement had also been discussed in chapter 2. Assuming
that the variance of curvature error noise in the Equation (2.20) is unit ( 2 1 ), then the
standard deviations in the Equation (2.21), 1, 1,2,...,e i are shown in Figure 4.7.
Figure 4.7: Error of estimates of modal weights assuming uncorrelated noise of unit variance on all curvature measurements
From the above figure, it is roughly predicted that using the curvature
measurements to identify the modes 1-4 of riser VIV motion may lead to large errors.
Therefore, in order to control the noise effect from curvature measurements for these
low modes, a modified system matrix needs to used and is written as
00 n N N
n N
A
(4.8)
0 2 4 6 8 10 12 14 16 180
0.5
1
1.5
2
2.5
3
3.5
Mode number
Sta
ndard
devia
tion o
f err
or

Chapter 4
59
Where, the mode-shapes of riser VIV displacements are sinn n z L , the mode-
shapes of riser curvatures are 2sinn n L n z L , the zero sub-matrix contains
the 1-4 mode-shapes of riser curvature. This zero sub-matrix implys that only
acceleration signals are used to solve for the paticipating modes smaller than 5.
4.2.4 Obtaining the modal weights matrix w
Solving the system of equations ˆˆAw b for w , and taking the inverse Fourier
transform with w , we will obtain ( )nw t corresponding to each mode. And then the RMS
of modal weights for each mode will be calculated by
2
1
1( )
N
RMS i
i
w w tN
(4.9)
Figure 4.8 depicits the normalized RMS cross-flow and in-line modal weights for test
1113. It can be seen that the dominant CF mode number is 6 and the IL one is 8. In case
1113, for riser VIV in cross-flow direction, the dominant response frequency shown in
Figure 4.2 is 9.86 Hz which is quite close to the 6th natural frequency of 10.84Hz shown
in Table 4.1. This means that the claculated result could be most likely correct. For riser
VIV in in-line direction, Figure 4.3 shows that the dominant response frequency is
19.93Hz. However, the 8th natural frequency of riser model shown in Table 4.1 is
16.68Hz. This disagreement may imply that the high frequency vibration will alter the
high mode natural frequencies of riser model by changing its added mass or damping.
Figure 4.8: Normalized RMS modal weights for case 1113
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15No
rmal
ize
d R
MS
Mo
dal
We
igh
ts
Mode number
cross-flow in-line
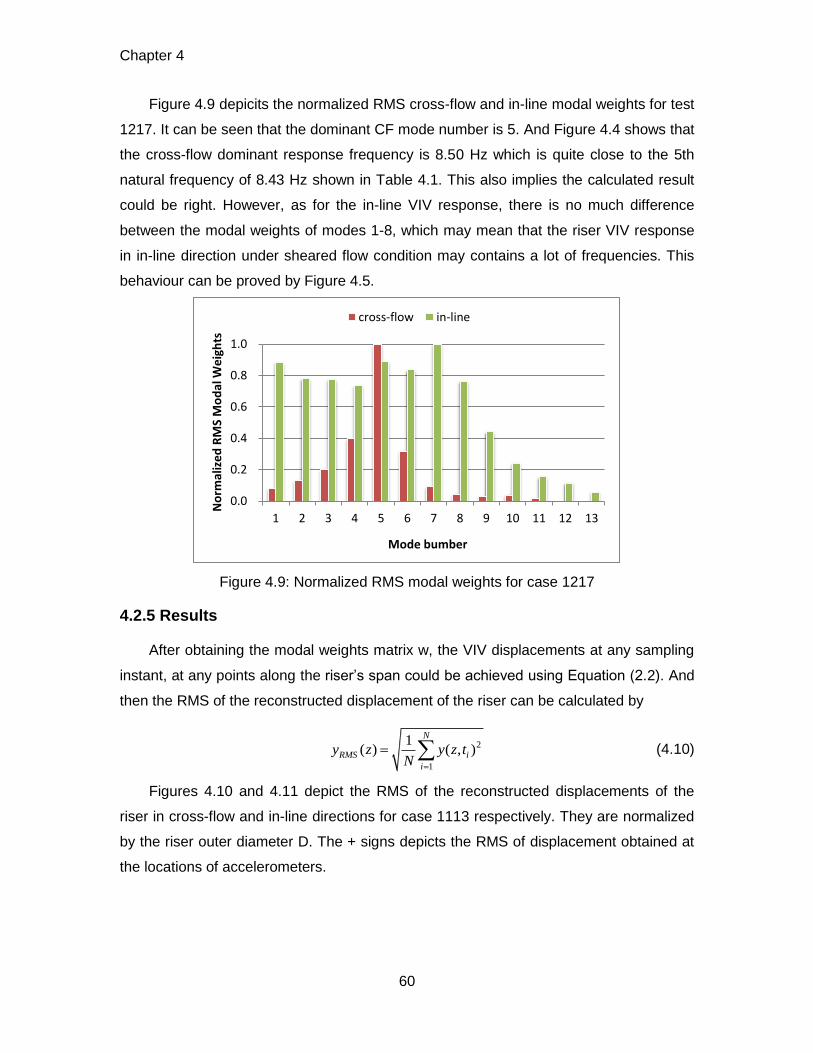
Chapter 4
60
Figure 4.9 depicits the normalized RMS cross-flow and in-line modal weights for test
1217. It can be seen that the dominant CF mode number is 5. And Figure 4.4 shows that
the cross-flow dominant response frequency is 8.50 Hz which is quite close to the 5th
natural frequency of 8.43 Hz shown in Table 4.1. This also implies the calculated result
could be right. However, as for the in-line VIV response, there is no much difference
between the modal weights of modes 1-8, which may mean that the riser VIV response
in in-line direction under sheared flow condition may contains a lot of frequencies. This
behaviour can be proved by Figure 4.5.
Figure 4.9: Normalized RMS modal weights for case 1217
4.2.5 Results
After obtaining the modal weights matrix w, the VIV displacements at any sampling
instant, at any points along the riser’s span could be achieved using Equation (2.2). And
then the RMS of the reconstructed displacement of the riser can be calculated by
2
1
1( ) ( , )
N
RMS i
i
y z y z tN
(4.10)
Figures 4.10 and 4.11 depict the RMS of the reconstructed displacements of the
riser in cross-flow and in-line directions for case 1113 respectively. They are normalized
by the riser outer diameter D. The + signs depicts the RMS of displacement obtained at
the locations of accelerometers.
0.0
0.2
0.4
0.6
0.8
1.0
1 2 3 4 5 6 7 8 9 10 11 12 13
No
rmal
ize
d R
MS
Mo
dal
We
igh
ts
Mode bumber
cross-flow in-line
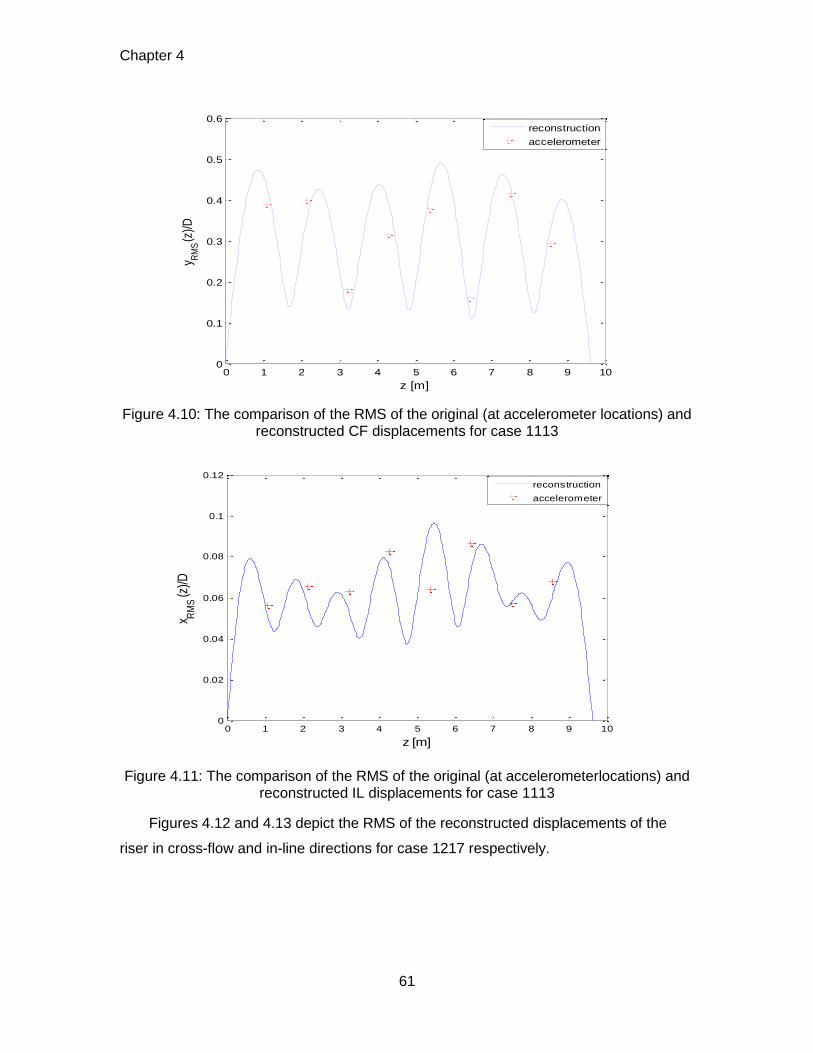
Chapter 4
61
Figure 4.10: The comparison of the RMS of the original (at accelerometer locations) and reconstructed CF displacements for case 1113
Figure 4.11: The comparison of the RMS of the original (at accelerometerlocations) and reconstructed IL displacements for case 1113
Figures 4.12 and 4.13 depict the RMS of the reconstructed displacements of the
riser in cross-flow and in-line directions for case 1217 respectively.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
y RM
S (z)
/D
reconstruction
accelerometer
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
z [m]
x RM
S (z
)/D
reconstruction
accelerometer
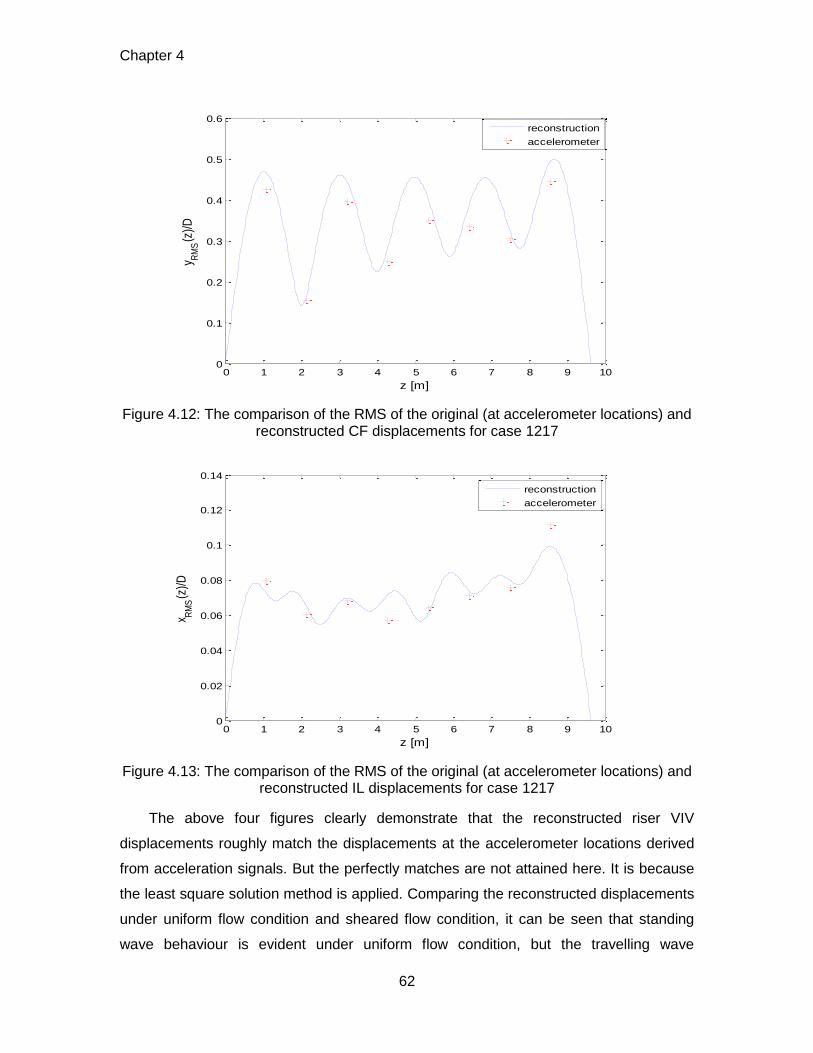
Chapter 4
62
Figure 4.12: The comparison of the RMS of the original (at accelerometer locations) and reconstructed CF displacements for case 1217
Figure 4.13: The comparison of the RMS of the original (at accelerometer locations) and reconstructed IL displacements for case 1217
The above four figures clearly demonstrate that the reconstructed riser VIV
displacements roughly match the displacements at the accelerometer locations derived
from acceleration signals. But the perfectly matches are not attained here. It is because
the least square solution method is applied. Comparing the reconstructed displacements
under uniform flow condition and sheared flow condition, it can be seen that standing
wave behaviour is evident under uniform flow condition, but the travelling wave
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
y RM
S (z)
/D
reconstruction
accelerometer
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
z [m]
x RM
S (z)
/D
reconstruction
accelerometer
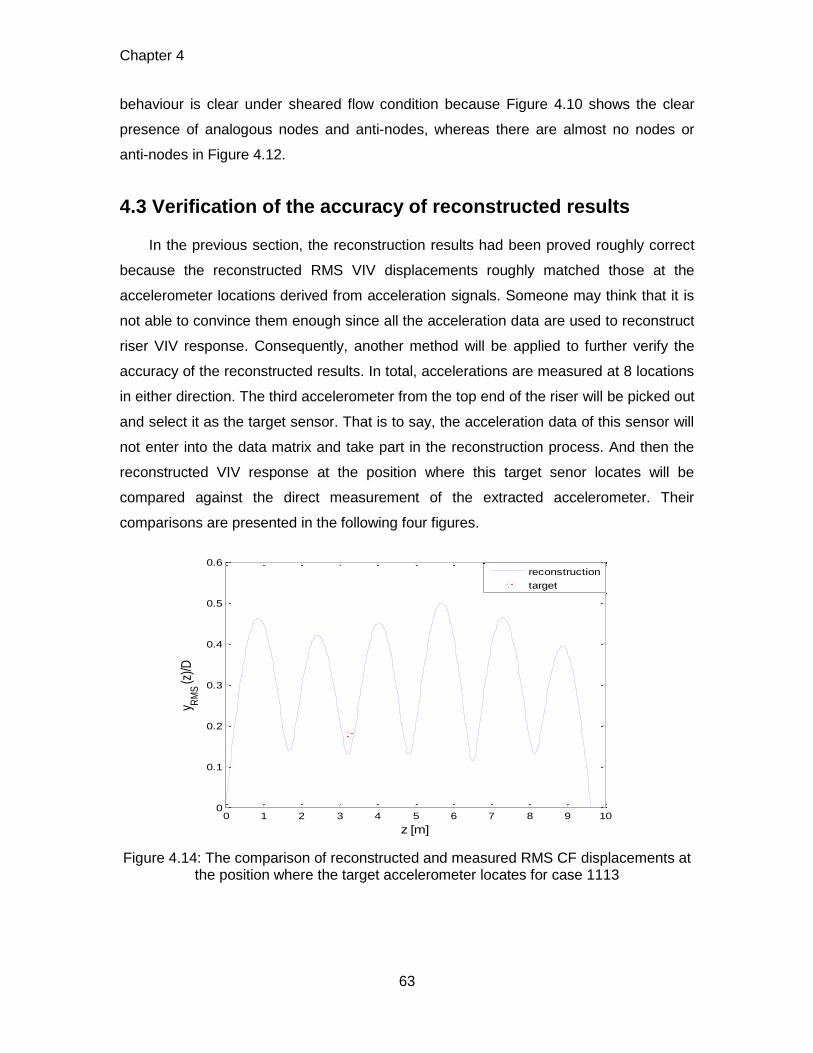
Chapter 4
63
behaviour is clear under sheared flow condition because Figure 4.10 shows the clear
presence of analogous nodes and anti-nodes, whereas there are almost no nodes or
anti-nodes in Figure 4.12.
4.3 Verification of the accuracy of reconstructed results
In the previous section, the reconstruction results had been proved roughly correct
because the reconstructed RMS VIV displacements roughly matched those at the
accelerometer locations derived from acceleration signals. Someone may think that it is
not able to convince them enough since all the acceleration data are used to reconstruct
riser VIV response. Consequently, another method will be applied to further verify the
accuracy of the reconstructed results. In total, accelerations are measured at 8 locations
in either direction. The third accelerometer from the top end of the riser will be picked out
and select it as the target sensor. That is to say, the acceleration data of this sensor will
not enter into the data matrix and take part in the reconstruction process. And then the
reconstructed VIV response at the position where this target senor locates will be
compared against the direct measurement of the extracted accelerometer. Their
comparisons are presented in the following four figures.
Figure 4.14: The comparison of reconstructed and measured RMS CF displacements at the position where the target accelerometer locates for case 1113
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
y RM
S (z
)/D
reconstruction
target
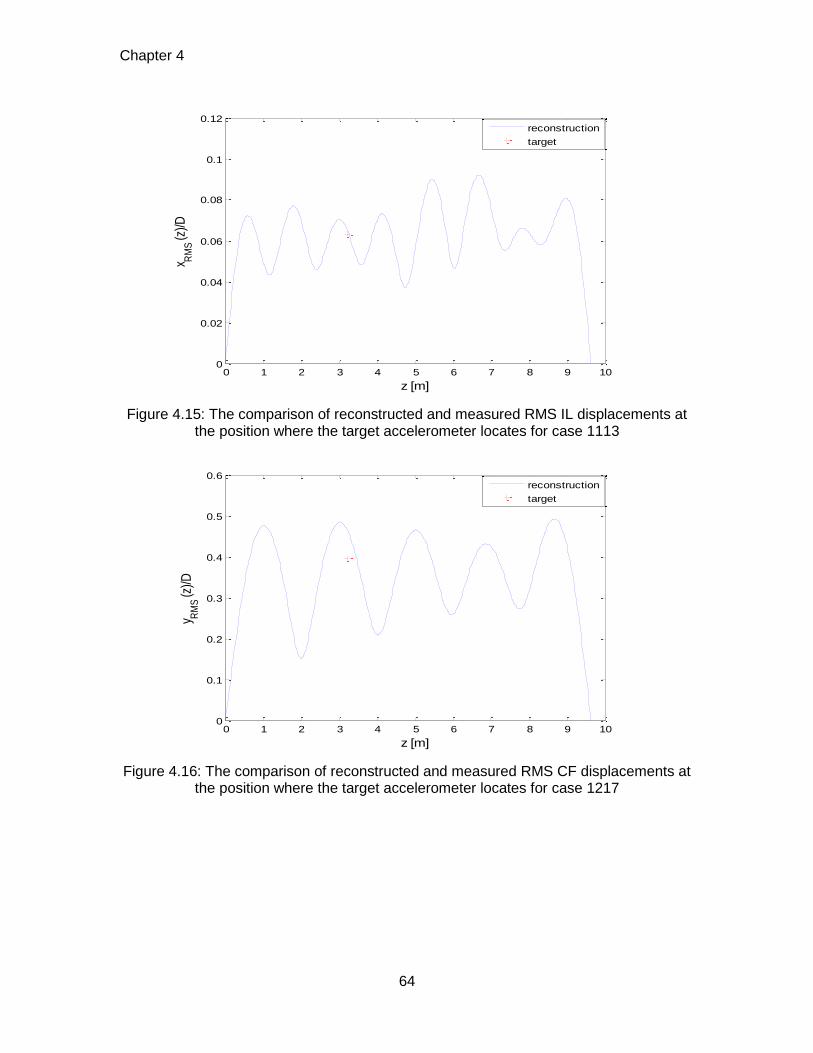
Chapter 4
64
Figure 4.15: The comparison of reconstructed and measured RMS IL displacements at the position where the target accelerometer locates for case 1113
Figure 4.16: The comparison of reconstructed and measured RMS CF displacements at the position where the target accelerometer locates for case 1217
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
z [m]
x RM
S (z
)/D
reconstruction
target
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
y RM
S (z
)/D
reconstruction
target
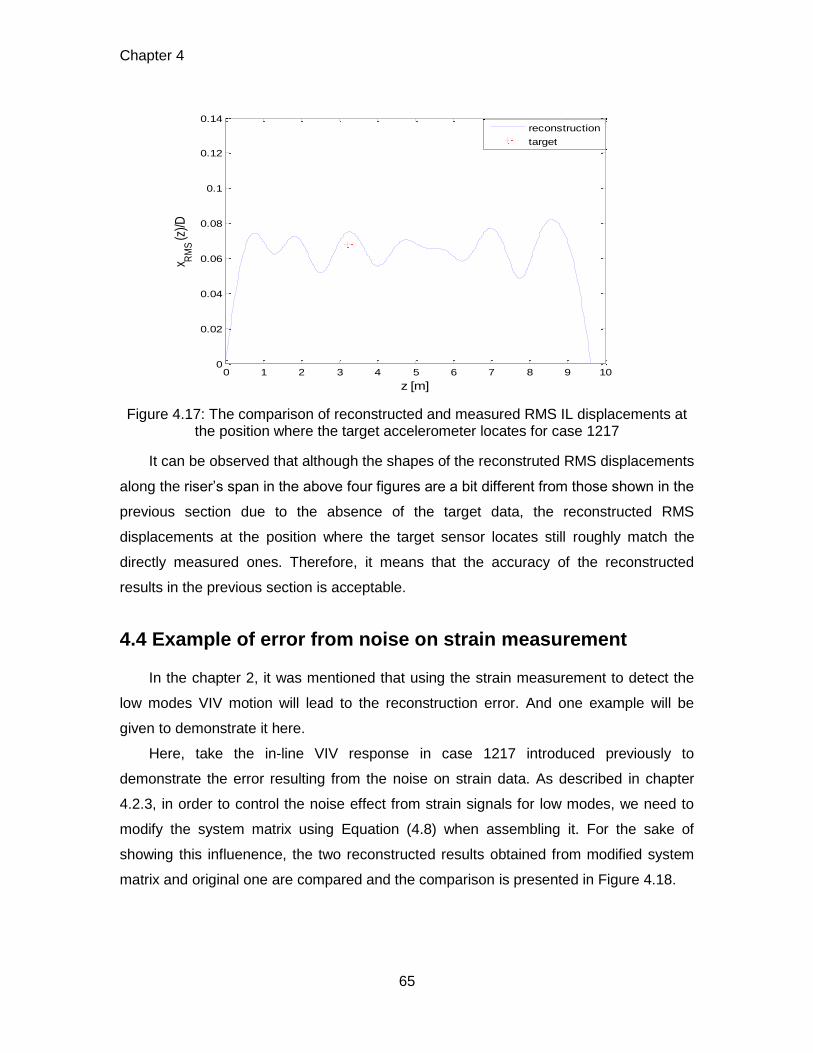
Chapter 4
65
Figure 4.17: The comparison of reconstructed and measured RMS IL displacements at the position where the target accelerometer locates for case 1217
It can be observed that although the shapes of the reconstruted RMS displacements
along the riser’s span in the above four figures are a bit different from those shown in the
previous section due to the absence of the target data, the reconstructed RMS
displacements at the position where the target sensor locates still roughly match the
directly measured ones. Therefore, it means that the accuracy of the reconstructed
results in the previous section is acceptable.
4.4 Example of error from noise on strain measurement
In the chapter 2, it was mentioned that using the strain measurement to detect the
low modes VIV motion will lead to the reconstruction error. And one example will be
given to demonstrate it here.
Here, take the in-line VIV response in case 1217 introduced previously to
demonstrate the error resulting from the noise on strain data. As described in chapter
4.2.3, in order to control the noise effect from strain signals for low modes, we need to
modify the system matrix using Equation (4.8) when assembling it. For the sake of
showing this influenence, the two reconstructed results obtained from modified system
matrix and original one are compared and the comparison is presented in Figure 4.18.
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
z [m]
x RM
S (z
)/D
reconstruction
target
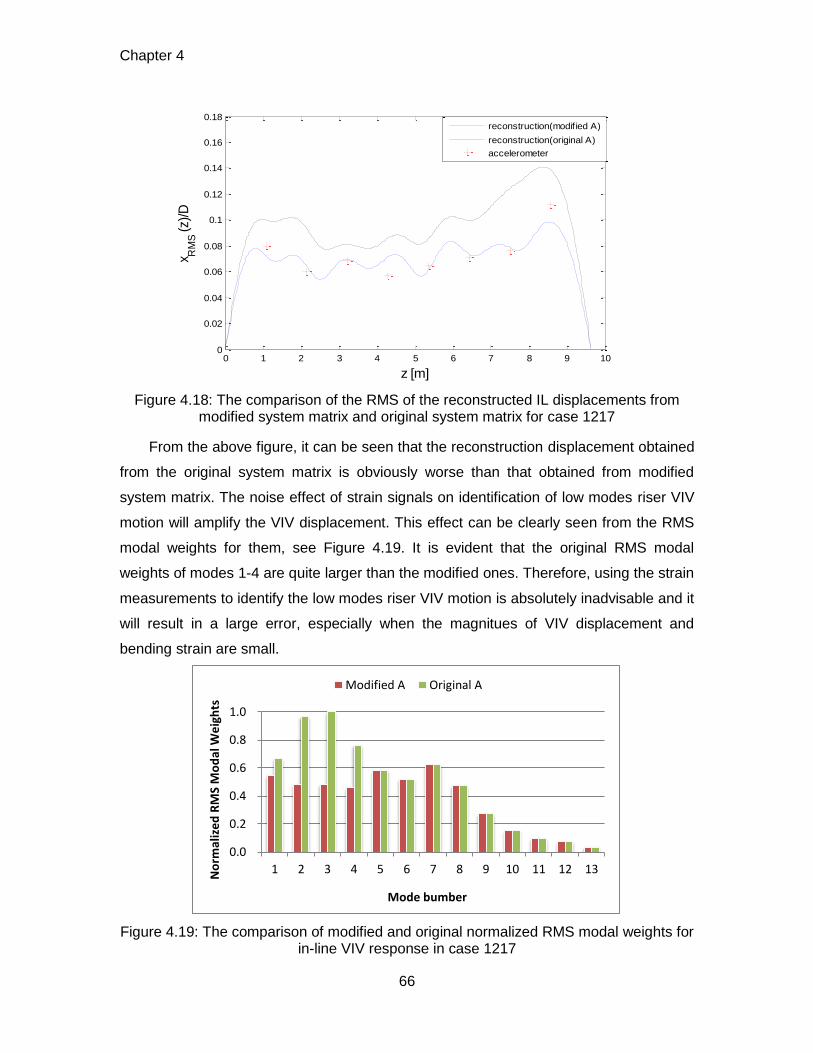
Chapter 4
66
Figure 4.18: The comparison of the RMS of the reconstructed IL displacements from modified system matrix and original system matrix for case 1217
From the above figure, it can be seen that the reconstruction displacement obtained
from the original system matrix is obviously worse than that obtained from modified
system matrix. The noise effect of strain signals on identification of low modes riser VIV
motion will amplify the VIV displacement. This effect can be clearly seen from the RMS
modal weights for them, see Figure 4.19. It is evident that the original RMS modal
weights of modes 1-4 are quite larger than the modified ones. Therefore, using the strain
measurements to identify the low modes riser VIV motion is absolutely inadvisable and it
will result in a large error, especially when the magnitues of VIV displacement and
bending strain are small.
Figure 4.19: The comparison of modified and original normalized RMS modal weights for in-line VIV response in case 1217
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
z [m]
x RM
S (
z)/
D
reconstruction(modif ied A)
reconstruction(original A)
accelerometer
0.0
0.2
0.4
0.6
0.8
1.0
1 2 3 4 5 6 7 8 9 10 11 12 13No
rmal
ize
d R
MS
Mo
dal
We
igh
ts
Mode bumber
Modified A Original A
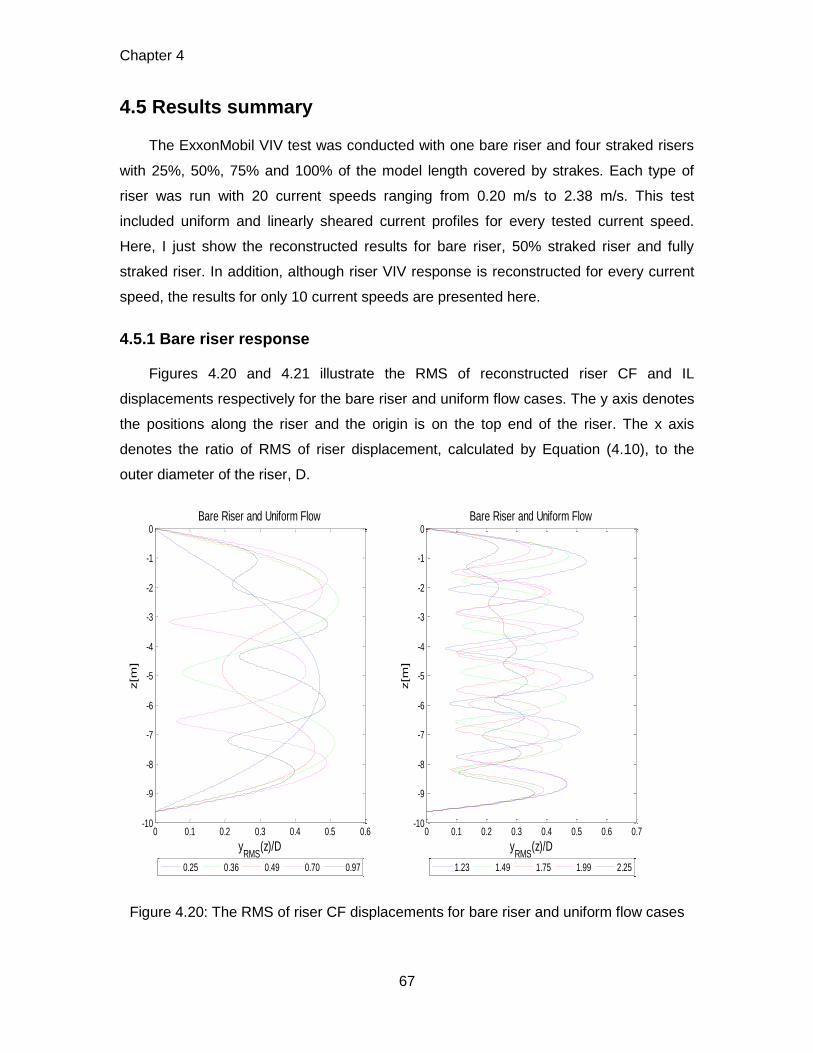
Chapter 4
67
4.5 Results summary
The ExxonMobil VIV test was conducted with one bare riser and four straked risers
with 25%, 50%, 75% and 100% of the model length covered by strakes. Each type of
riser was run with 20 current speeds ranging from 0.20 m/s to 2.38 m/s. This test
included uniform and linearly sheared current profiles for every tested current speed.
Here, I just show the reconstructed results for bare riser, 50% straked riser and fully
straked riser. In addition, although riser VIV response is reconstructed for every current
speed, the results for only 10 current speeds are presented here.
4.5.1 Bare riser response
Figures 4.20 and 4.21 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the bare riser and uniform flow cases. The y axis denotes
the positions along the riser and the origin is on the top end of the riser. The x axis
denotes the ratio of RMS of riser displacement, calculated by Equation (4.10), to the
outer diameter of the riser, D.
Figure 4.20: The RMS of riser CF displacements for bare riser and uniform flow cases
0 0.1 0.2 0.3 0.4 0.5 0.6-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Bare Riser and Uniform Flow
0.25 0.36 0.49 0.70 0.97
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Bare Riser and Uniform Flow
1.23 1.49 1.75 1.99 2.25
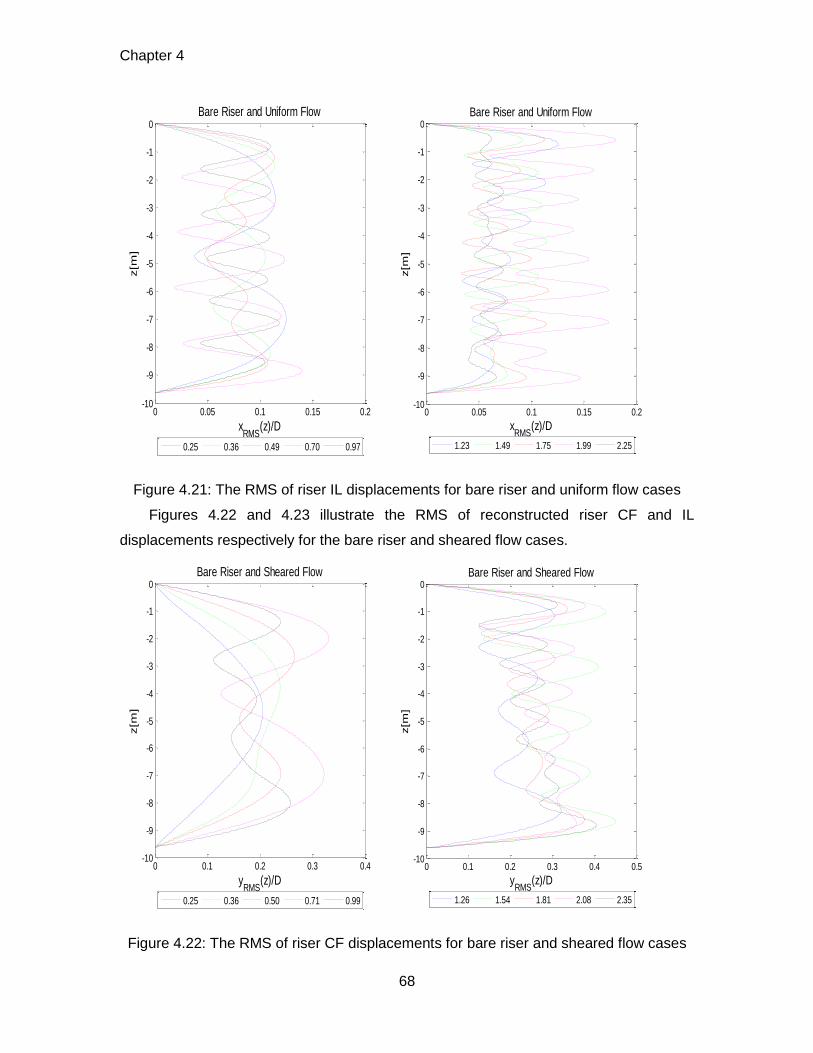
Chapter 4
68
Figure 4.21: The RMS of riser IL displacements for bare riser and uniform flow cases
Figures 4.22 and 4.23 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the bare riser and sheared flow cases.
Figure 4.22: The RMS of riser CF displacements for bare riser and sheared flow cases
0 0.05 0.1 0.15 0.2-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
Bare Riser and Uniform Flow
0.25 0.36 0.49 0.70 0.97
0 0.05 0.1 0.15 0.2-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
Bare Riser and Uniform Flow
1.23 1.49 1.75 1.99 2.25
0 0.1 0.2 0.3 0.4-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Bare Riser and Sheared Flow
0.25 0.36 0.50 0.71 0.99
0 0.1 0.2 0.3 0.4 0.5-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Bare Riser and Sheared Flow
1.26 1.54 1.81 2.08 2.35
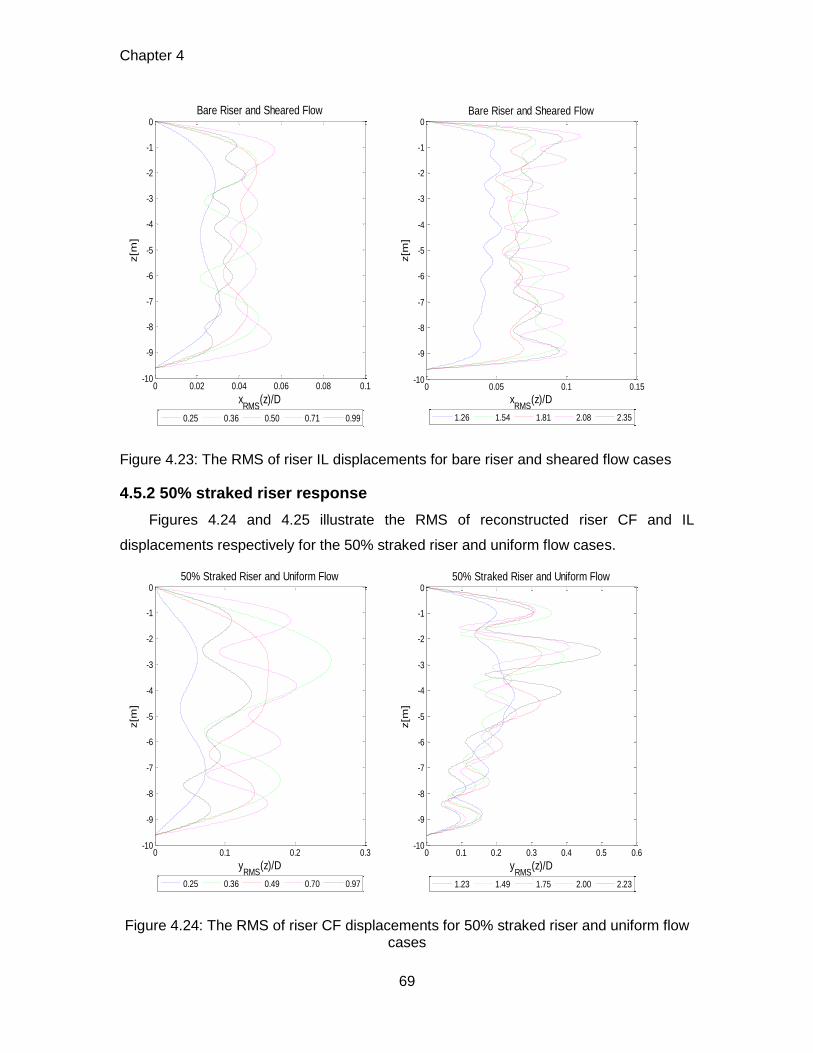
Chapter 4
69
Figure 4.23: The RMS of riser IL displacements for bare riser and sheared flow cases
4.5.2 50% straked riser response
Figures 4.24 and 4.25 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the 50% straked riser and uniform flow cases.
Figure 4.24: The RMS of riser CF displacements for 50% straked riser and uniform flow cases
0 0.02 0.04 0.06 0.08 0.1-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
Bare Riser and Sheared Flow
0.25 0.36 0.50 0.71 0.99
0 0.05 0.1 0.15-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/Dz[m
]
Bare Riser and Sheared Flow
1.26 1.54 1.81 2.08 2.35
0 0.1 0.2 0.3-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
50% Straked Riser and Uniform Flow
0.25 0.36 0.49 0.70 0.97
0 0.1 0.2 0.3 0.4 0.5 0.6-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
50% Straked Riser and Uniform Flow
1.23 1.49 1.75 2.00 2.23
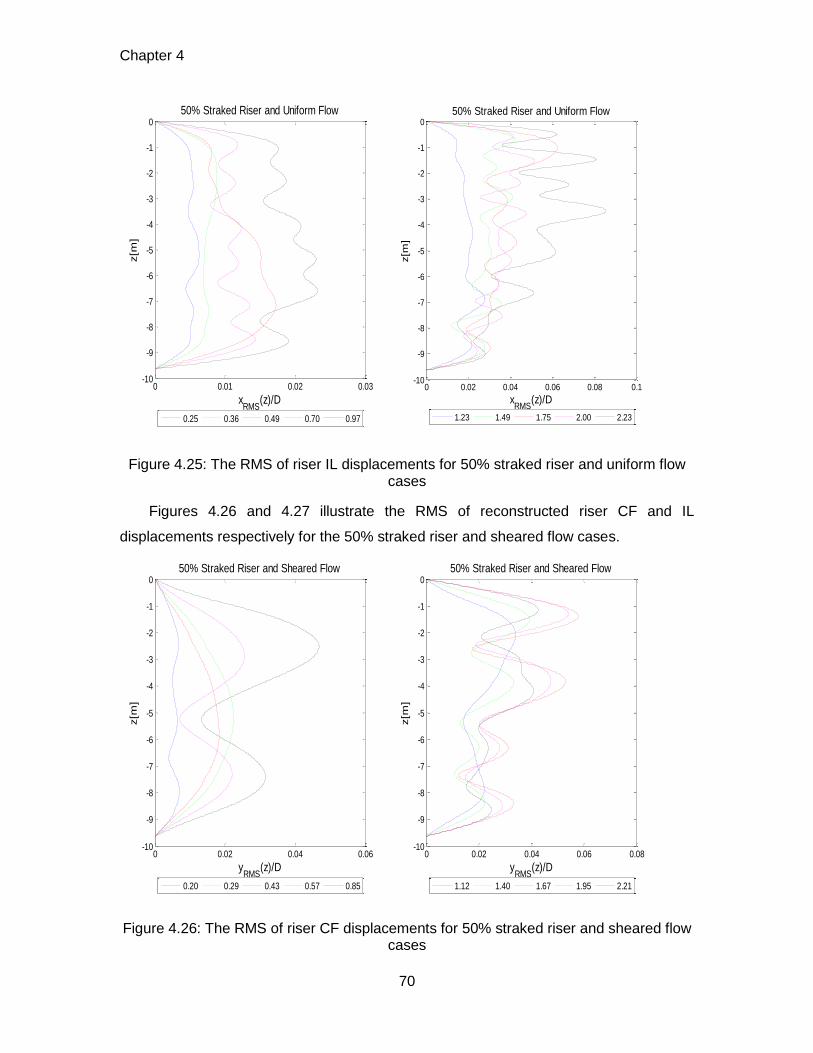
Chapter 4
70
Figure 4.25: The RMS of riser IL displacements for 50% straked riser and uniform flow cases
Figures 4.26 and 4.27 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the 50% straked riser and sheared flow cases.
Figure 4.26: The RMS of riser CF displacements for 50% straked riser and sheared flow cases
0 0.01 0.02 0.03-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
50% Straked Riser and Uniform Flow
0.25 0.36 0.49 0.70 0.97
0 0.02 0.04 0.06 0.08 0.1-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/Dz[m
]
50% Straked Riser and Uniform Flow
1.23 1.49 1.75 2.00 2.23
0 0.02 0.04 0.06-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
50% Straked Riser and Sheared Flow
0.20 0.29 0.43 0.57 0.85
0 0.02 0.04 0.06 0.08-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
50% Straked Riser and Sheared Flow
1.12 1.40 1.67 1.95 2.21
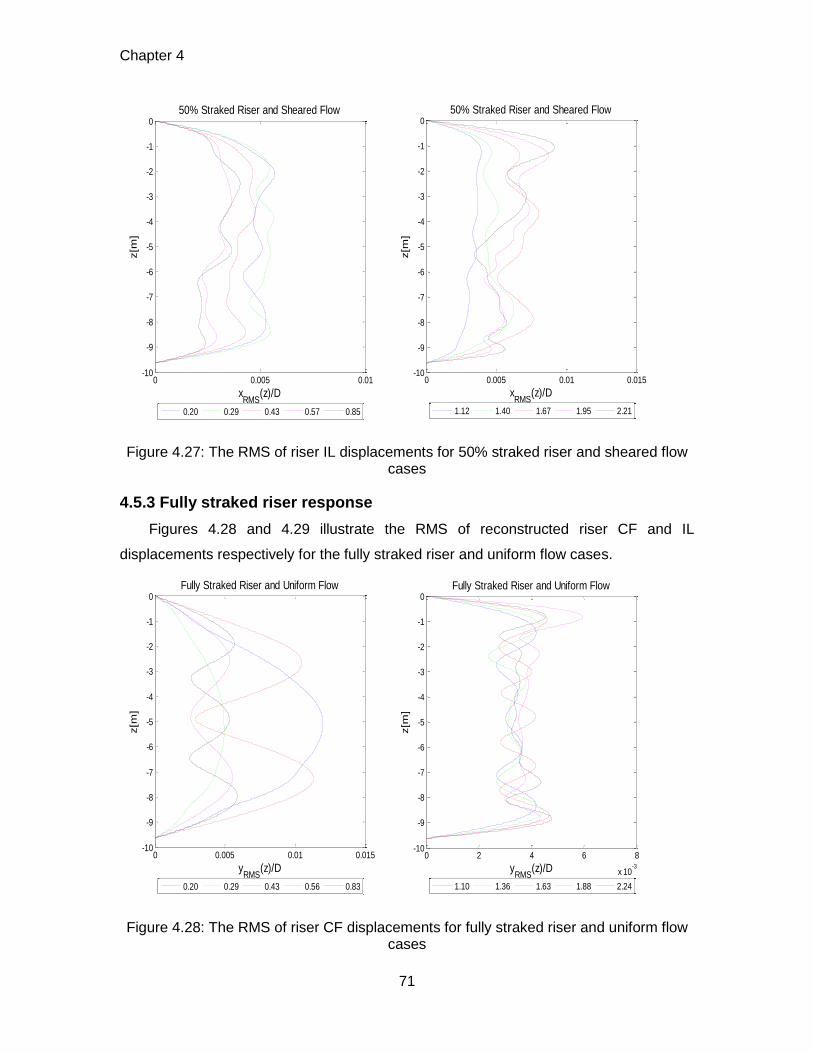
Chapter 4
71
Figure 4.27: The RMS of riser IL displacements for 50% straked riser and sheared flow cases
4.5.3 Fully straked riser response
Figures 4.28 and 4.29 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the fully straked riser and uniform flow cases.
Figure 4.28: The RMS of riser CF displacements for fully straked riser and uniform flow cases
0 0.005 0.01-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
50% Straked Riser and Sheared Flow
0.20 0.29 0.43 0.57 0.85
0 0.005 0.01 0.015-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/Dz[m
]
50% Straked Riser and Sheared Flow
1.12 1.40 1.67 1.95 2.21
0 0.005 0.01 0.015-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Fully Straked Riser and Uniform Flow
0.20 0.29 0.43 0.56 0.83
0 2 4 6 8
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Fully Straked Riser and Uniform Flow
1.10 1.36 1.63 1.88 2.24
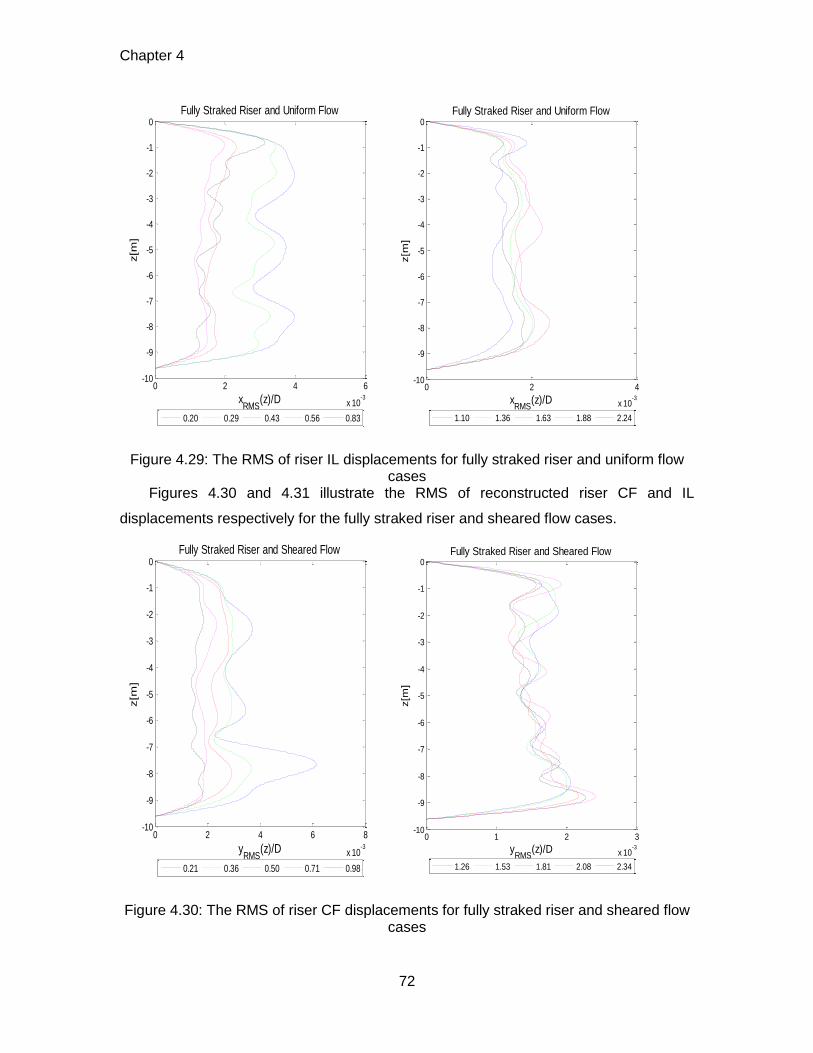
Chapter 4
72
Figure 4.29: The RMS of riser IL displacements for fully straked riser and uniform flow cases
Figures 4.30 and 4.31 illustrate the RMS of reconstructed riser CF and IL
displacements respectively for the fully straked riser and sheared flow cases.
Figure 4.30: The RMS of riser CF displacements for fully straked riser and sheared flow cases
0 2 4 6
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
Fully Straked Riser and Uniform Flow
0.20 0.29 0.43 0.56 0.83
0 2 4
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/Dz[m
]
Fully Straked Riser and Uniform Flow
1.10 1.36 1.63 1.88 2.24
0 2 4 6 8
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Fully Straked Riser and Sheared Flow
0.21 0.36 0.50 0.71 0.98
0 1 2 3
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
yRMS
(z)/D
z[m
]
Fully Straked Riser and Sheared Flow
1.26 1.53 1.81 2.08 2.34
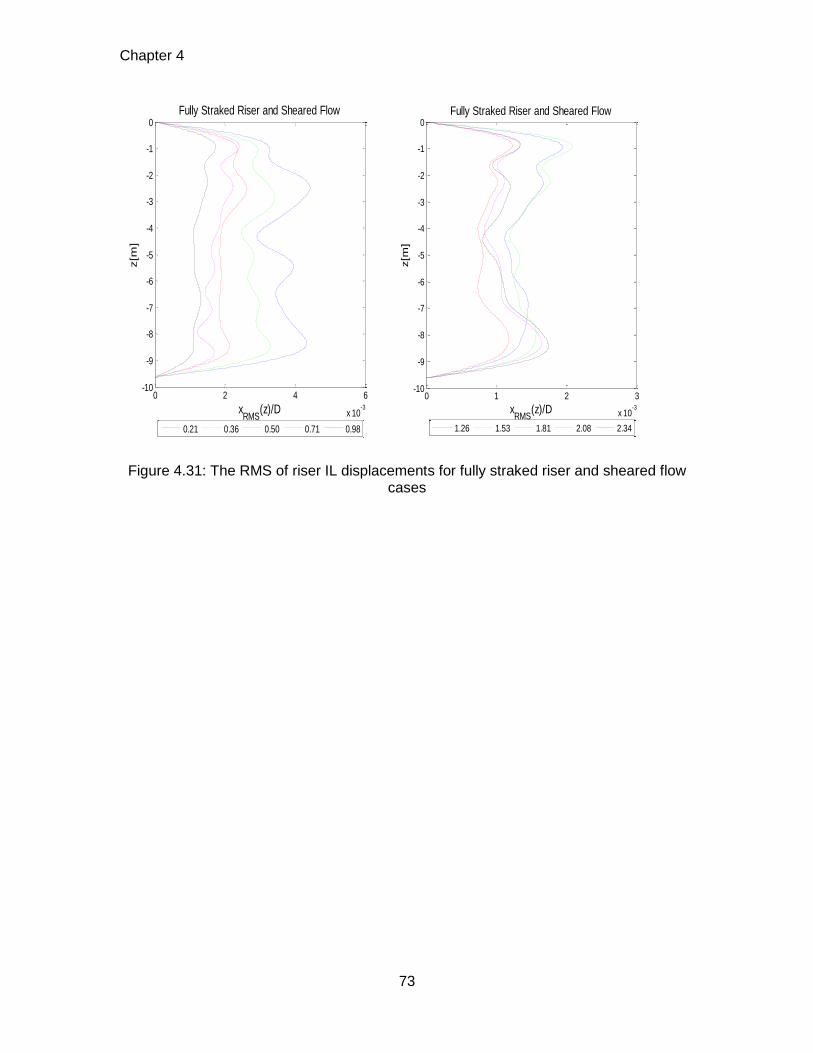
Chapter 4
73
Figure 4.31: The RMS of riser IL displacements for fully straked riser and sheared flow cases
0 2 4 6
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/D
z[m
]
Fully Straked Riser and Sheared Flow
0.21 0.36 0.50 0.71 0.98
0 1 2 3
x 10-3
-10
-9
-8
-7
-6
-5
-4
-3
-2
-1
0
xRMS
(z)/Dz[m
]
Fully Straked Riser and Sheared Flow
1.26 1.53 1.81 2.08 2.34
Chapter 5
74
Chapter 5
5 Analyses to reconstructed VIV
responses in ExxonMobil VIV test
5.1 Riser VIV modal decomposition
In the chapter 4, the method of superposing the riser’s free vibration modes was
used to reconstruct the riser’s VIV responses in the ExxonMobil experiment. However,
the response modes corresponding to the riser’s specific response frequencies are not
known and they are most likely not the free vibration modes of the riser. Thus, in order to
eliminate the misunderstanding about the free vibration mode and response mode, these
specific response modes are needed to be extracted. In simple terms, the free vibration
mode refers to the riser’s natural frequency and the response mode refers to the riser’s
specific response frequency. And based on the obtained spatially and temporally dense
riser displacement signals after the response reconstruction, the extraction of response
mode becomes feasible.
5.1.1 Response modes and response frequencies
Before extracting the response mode, it needs to be defined at first. The response
mode denotes the special (complex) spatial function that describes the response of the
riser at a specific frequency (response frequency). The bivariate and dense signals of
riser VIV displacements in space and time can be expressed by its two dimensional
Fourier transforms as:
21 1
1( , ) ( , )
2
l jm r
Mi tik z
r j m l
m l
y z t k e e
(5.1)
Recasting Equation (5.1) as:

Chapter 5
75
1
( , ) ( ) l ji t
r j l r
l
y z t Y z e
(5.2)
Where, ( )l rY z are the 1,2,...l complex response modes corresponding to the
response frequencies l , and are given as:
21
1( ) ( , )
2
m r
Mik z
l r m l
m
Y z k e
(5.3)
Peak response modes: With regard to the riser VIV response having one single
peak frequency or a few separate peak frequencies, the response modes corresponding
to these peak response frequencies, which are denoted by n , can be extracted. These
extracted response modes are called peak response modes and are denoted by n rY z .
Thus, n is a subset of l and n rY z is a subset of l rY z . As a consequence, the
response of the riser could be approximated using the peak response modes as:
1
( , ) n j
Ni t
r j n r
n
y z t Y z e
(5.4)
5.1.2 Numerical method
Based on the definition of response modes given in chapter 5.1.1, a numerical
method to extract these response modes from the reconstruction data is found. The
Fourier expansion of the time series of VIV displacements at any given locations rz can
be written as:
1
ˆ( , ) Re ( , ) l ji t
r j r l
l
y z t y z e
(5.5)
Where, ˆ( , )r ly z is a complex quantity, representing the thl Fourier coefficient
corresponding to the frequency l from the signal at position rz . The response mode at
frequency l , denoted by ( )l rY z , can be obtained by extracting the Fourier coefficients at
each point along the entire riser corresponding to the frequency l as:
ˆ( ) ( , )l r r lY z y z (5.6)
The modal magnitude | ( ) |l rY z corresponding to the response mode ( )l rY z is
obtained as:
Chapter 5
76
2 2
( ) Re ( ) Im ( )l r l r l rY z Y z Y z (5.7)
The modal phase angle ( )l rY z corresponding to the response mode ( )l rY z is
obtained as:
1
Im ( )( ) tan
Re ( )
l r
l r
l r
Y zY z
Y z
(5.8)
Prior to obtain the peak response modes, a span average spectrum is needed to
find out the peak response frequencies. The Fourier coefficients corresponding to these
peak frequencies obtained along the length of the riser give the peak response modes.
Using Equations (5.7) and (5.8), the modal magnitude ( )n rY z and the modal phase
angle ( )l rY z are obtained subsequently.
5.1.3 Application to ExxonMobil VIV test and discussion
Since the riser VIV response in in-line direction usually has a lot of frequencies,
especially in the sheared flow, which can be shown in Figure 4.5. Thus, we just apply the
above procedures of extracting the peak response modes to the riser VIV response in
cross-flow direction.
Uniform flow
The bare riser and uniform flow case 1113 mentioned in chapter 4 is selected as the
target here. As can be seen from Figure 4.2, the dominate peak frequency is 9.86 Hz.
And the peak response mode corresponding to this frequency will be extracted next.
One can observe the modal magnitude and the modal phase angle of this peak
response mode in Figures 5.1 and 5.2 respectively. This peak response mode is similar
to the sixth free vibration mode of a tensioned beam because the modal magnitude
shown in Figure 5.1 includes five analogous nodes. Correspondingly, the modal phase
angle shown in Figure 5.2 almost remains constant between the two consecutive so-
called nodes, with sudden jump occurring at the so-called node. These two features
accord with the characteristics of the standing wave, so it may imply that the standing
wave is dominated in the riser VIV response under uniform flow condition.
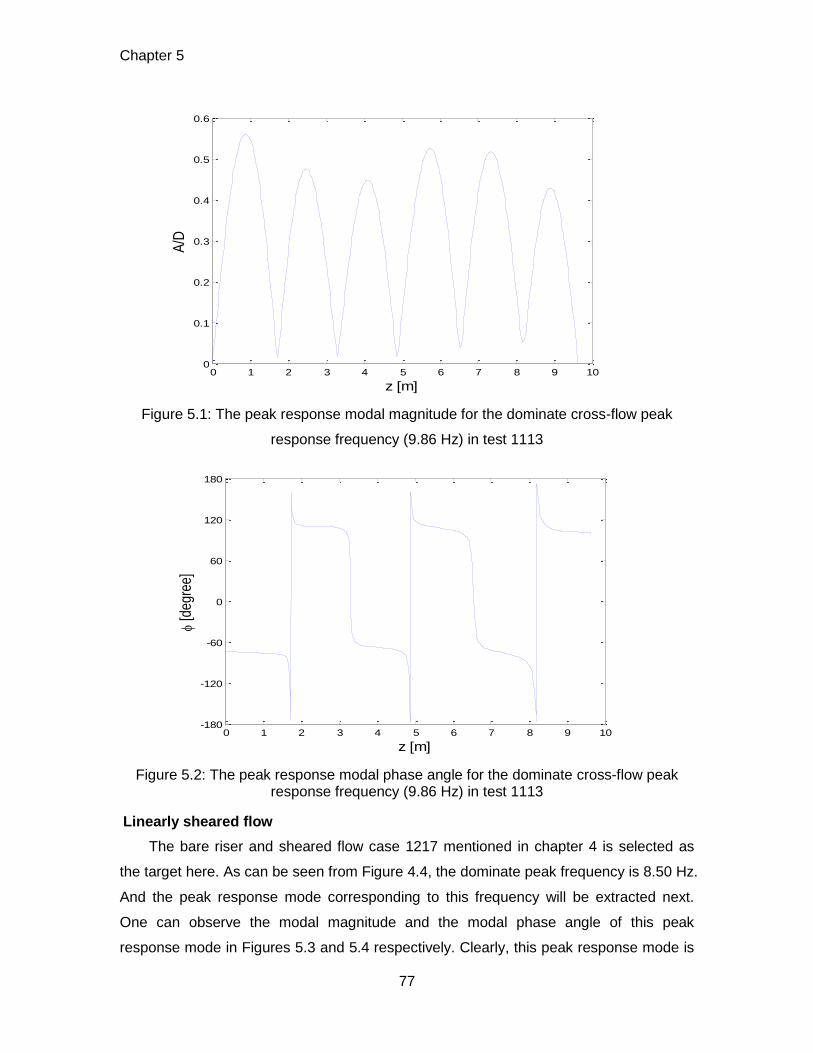
Chapter 5
77
Figure 5.1: The peak response modal magnitude for the dominate cross-flow peak
response frequency (9.86 Hz) in test 1113
Figure 5.2: The peak response modal phase angle for the dominate cross-flow peak response frequency (9.86 Hz) in test 1113
Linearly sheared flow
The bare riser and sheared flow case 1217 mentioned in chapter 4 is selected as
the target here. As can be seen from Figure 4.4, the dominate peak frequency is 8.50 Hz.
And the peak response mode corresponding to this frequency will be extracted next.
One can observe the modal magnitude and the modal phase angle of this peak
response mode in Figures 5.3 and 5.4 respectively. Clearly, this peak response mode is
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
A/D
0 1 2 3 4 5 6 7 8 9 10-180
-120
-60
0
60
120
180
z [m]
[d
egre
e]
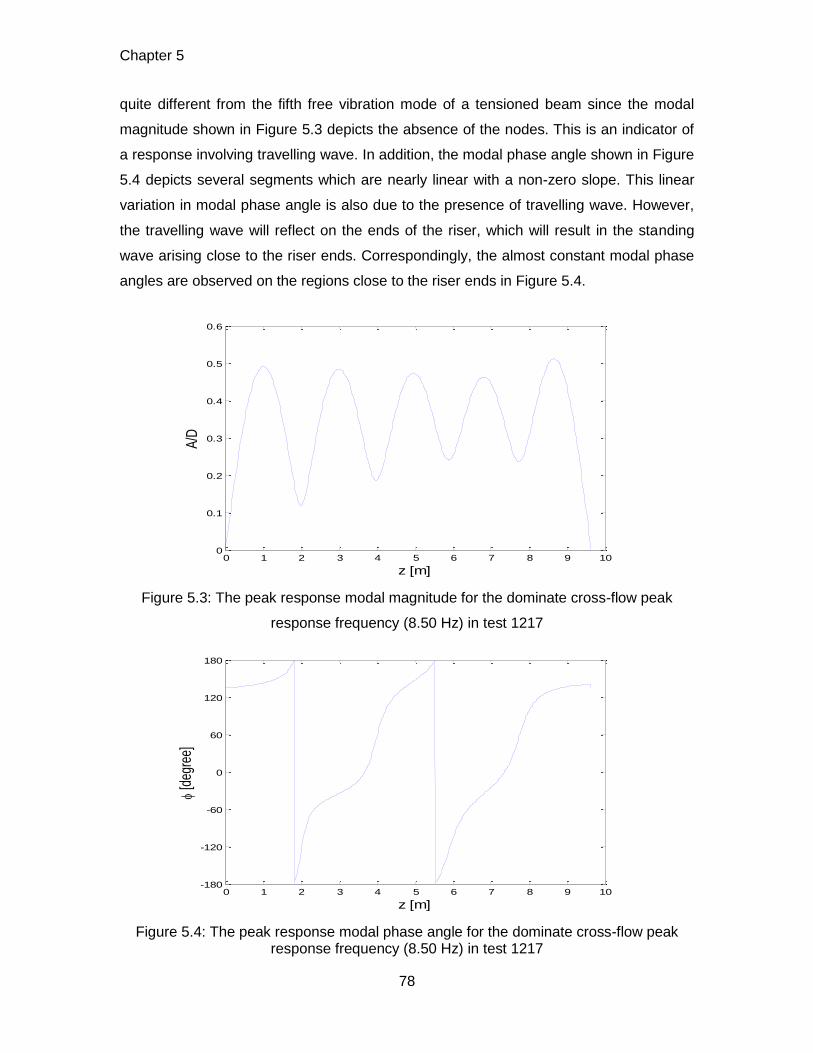
Chapter 5
78
quite different from the fifth free vibration mode of a tensioned beam since the modal
magnitude shown in Figure 5.3 depicts the absence of the nodes. This is an indicator of
a response involving travelling wave. In addition, the modal phase angle shown in Figure
5.4 depicts several segments which are nearly linear with a non-zero slope. This linear
variation in modal phase angle is also due to the presence of travelling wave. However,
the travelling wave will reflect on the ends of the riser, which will result in the standing
wave arising close to the riser ends. Correspondingly, the almost constant modal phase
angles are observed on the regions close to the riser ends in Figure 5.4.
Figure 5.3: The peak response modal magnitude for the dominate cross-flow peak
response frequency (8.50 Hz) in test 1217
Figure 5.4: The peak response modal phase angle for the dominate cross-flow peak response frequency (8.50 Hz) in test 1217
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
z [m]
A/D
0 1 2 3 4 5 6 7 8 9 10-180
-120
-60
0
60
120
180
z [m]
[d
egre
e]
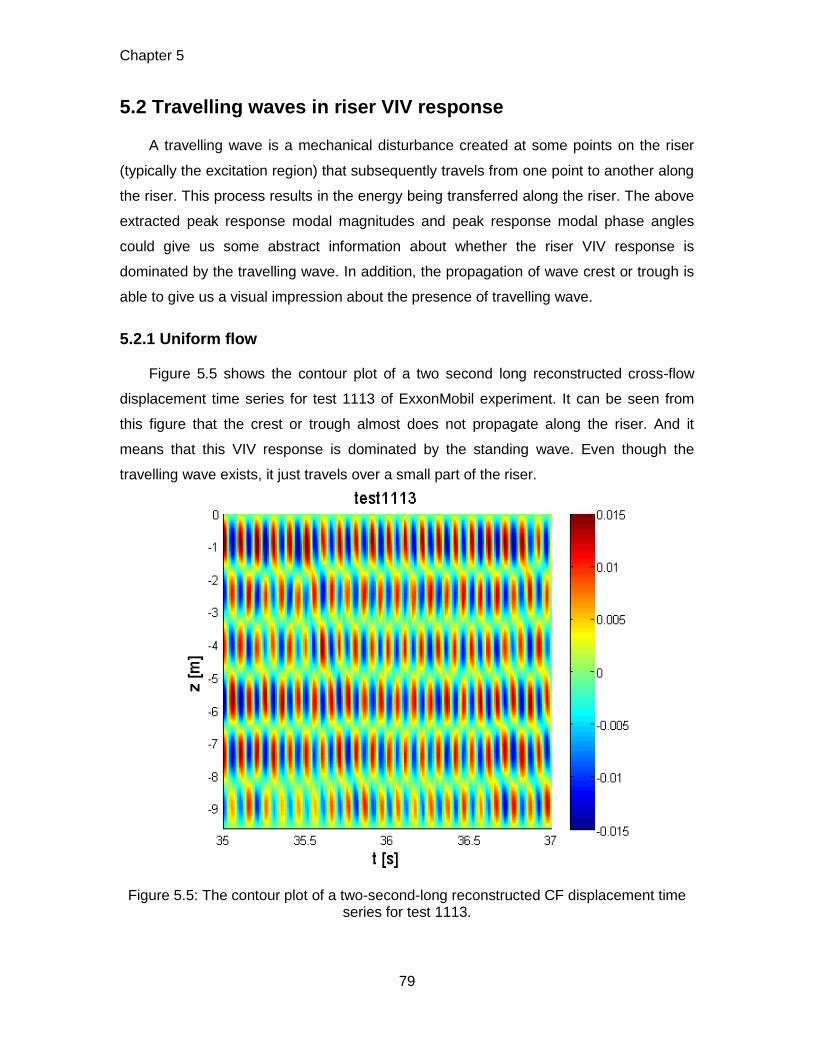
Chapter 5
79
5.2 Travelling waves in riser VIV response
A travelling wave is a mechanical disturbance created at some points on the riser
(typically the excitation region) that subsequently travels from one point to another along
the riser. This process results in the energy being transferred along the riser. The above
extracted peak response modal magnitudes and peak response modal phase angles
could give us some abstract information about whether the riser VIV response is
dominated by the travelling wave. In addition, the propagation of wave crest or trough is
able to give us a visual impression about the presence of travelling wave.
5.2.1 Uniform flow
Figure 5.5 shows the contour plot of a two second long reconstructed cross-flow
displacement time series for test 1113 of ExxonMobil experiment. It can be seen from
this figure that the crest or trough almost does not propagate along the riser. And it
means that this VIV response is dominated by the standing wave. Even though the
travelling wave exists, it just travels over a small part of the riser.
Figure 5.5: The contour plot of a two-second-long reconstructed CF displacement time series for test 1113.
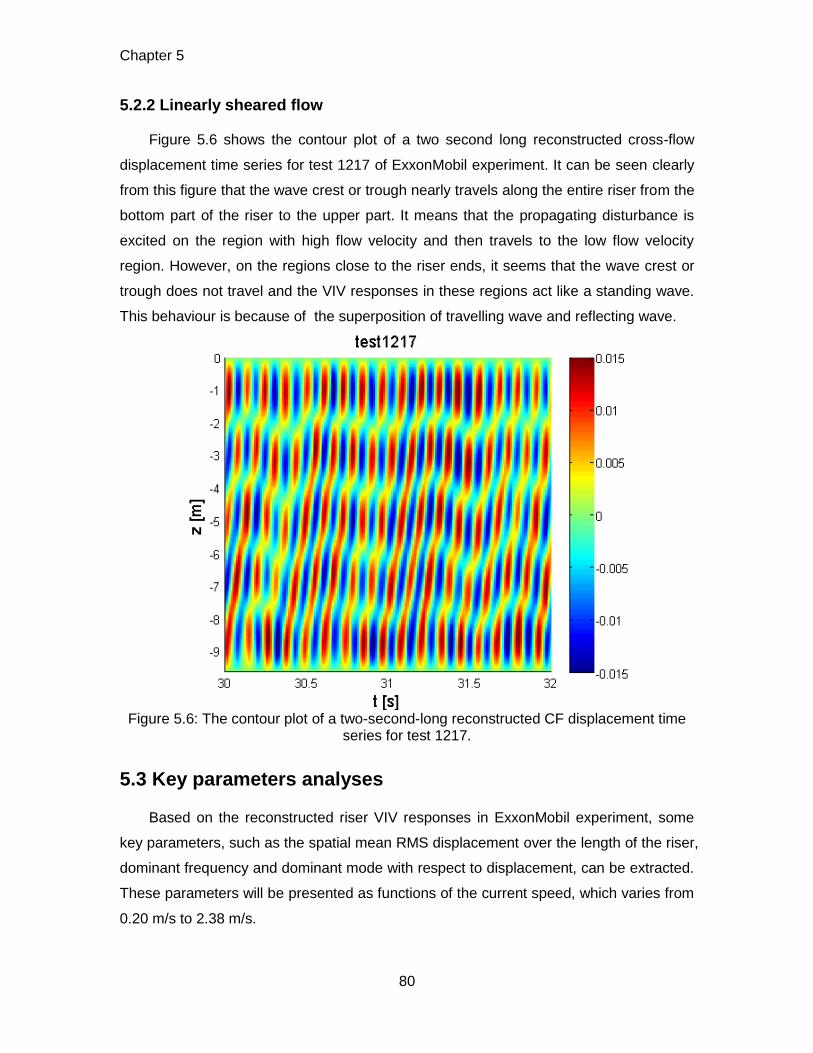
Chapter 5
80
5.2.2 Linearly sheared flow
Figure 5.6 shows the contour plot of a two second long reconstructed cross-flow
displacement time series for test 1217 of ExxonMobil experiment. It can be seen clearly
from this figure that the wave crest or trough nearly travels along the entire riser from the
bottom part of the riser to the upper part. It means that the propagating disturbance is
excited on the region with high flow velocity and then travels to the low flow velocity
region. However, on the regions close to the riser ends, it seems that the wave crest or
trough does not travel and the VIV responses in these regions act like a standing wave.
This behaviour is because of the superposition of travelling wave and reflecting wave.
Figure 5.6: The contour plot of a two-second-long reconstructed CF displacement time
series for test 1217.
5.3 Key parameters analyses
Based on the reconstructed riser VIV responses in ExxonMobil experiment, some
key parameters, such as the spatial mean RMS displacement over the length of the riser,
dominant frequency and dominant mode with respect to displacement, can be extracted.
These parameters will be presented as functions of the current speed, which varies from
0.20 m/s to 2.38 m/s.

Chapter 5
81
5.3.1 Bare riser
VIV displacement amplitude
Figures 5.7 and 5.8 present the mean of the RMS reconstructed cross-flow and in-
line displacements along the length of the bare riser for uniform flow tests and sheared
flow tests respectively. This parameter is quite suitable to judge the overall severity of
riser VIV and has close relationship with the riser’s fatigue life, thus this parameter is
chosen to be analyzed. Each pair of symbols (CF/IL) is representative of a single test.
And all the displacement results are normalized by the outer diameter of riser D.
For uniform flow, the mean RMS CF displacement shows a roughly constant level
over the whole tested current speeds, changing between 0.25D and 0.35D. And the
mean RMS IL displacement also remains almost stable with the increasing current
speed, but it is just approximately 1/4 of the CF one and varys between 0.05D and 0.1D.
For sheared flow, the mean RMS CF displacement shows a larger variation range
compared to that observed in uniform flow, changing between 0.1D and 0.35D with the
increasing maximum current speed. In general, it grows with the maximum current
speed and reaches the same level as that found in uniform flow after the maximum
current speed exceeds 1.4 m/s. In addition, you can see some local maxima and minima
across the tested current speeds. For example, there are two displacement peaks with
the maximum current speed of 0.57m/s and 1.67m/s. The presence of local
displacement peak is probably due to the occurrence of lock-in, namely, one of the
vortex shedding frequencies is very close to one of the riser’s natural frequencies. The
variation trend for the mean RMS IL displacement is identical to the CF one and it
changes between 0.02D and 0.1D.
Finally, it should be noted that the magnitudes of displacements in sheared flow are
lower than those in uniform flow when compared on the basis of maximum current speed.
The reduced response is due in part to there is less current energy in a sheared flow
with a given maximum current speed than in a uniform flow with the same maximum
current speed. The above observed phenomena are similar to the results reported by
Tognarelli et al. (2004) [27] and Lie et al. (1997) [28].
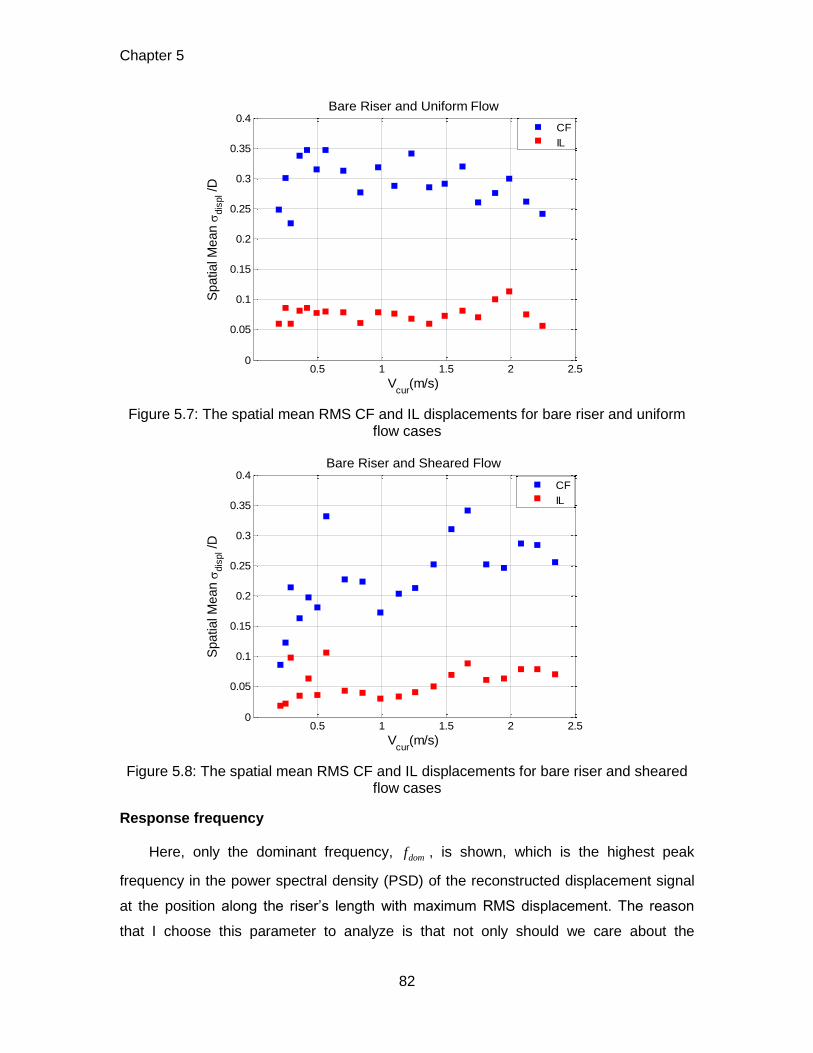
Chapter 5
82
Figure 5.7: The spatial mean RMS CF and IL displacements for bare riser and uniform flow cases
Figure 5.8: The spatial mean RMS CF and IL displacements for bare riser and sheared flow cases
Response frequency
Here, only the dominant frequency, domf , is shown, which is the highest peak
frequency in the power spectral density (PSD) of the reconstructed displacement signal
at the position along the riser’s length with maximum RMS displacement. The reason
that I choose this parameter to analyze is that not only should we care about the
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
D
Bare Riser and Uniform Flow
CF
IL
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
D
Bare Riser and Sheared Flow
CF
IL
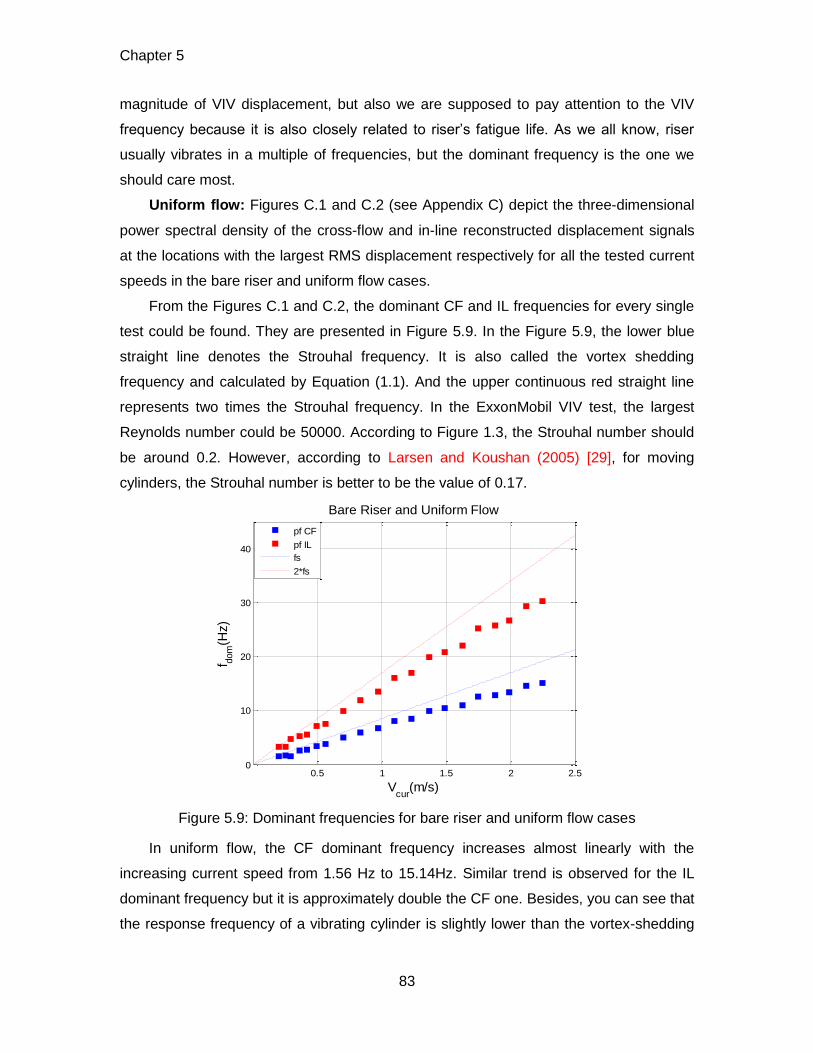
Chapter 5
83
magnitude of VIV displacement, but also we are supposed to pay attention to the VIV
frequency because it is also closely related to riser’s fatigue life. As we all know, riser
usually vibrates in a multiple of frequencies, but the dominant frequency is the one we
should care most.
Uniform flow: Figures C.1 and C.2 (see Appendix C) depict the three-dimensional
power spectral density of the cross-flow and in-line reconstructed displacement signals
at the locations with the largest RMS displacement respectively for all the tested current
speeds in the bare riser and uniform flow cases.
From the Figures C.1 and C.2, the dominant CF and IL frequencies for every single
test could be found. They are presented in Figure 5.9. In the Figure 5.9, the lower blue
straight line denotes the Strouhal frequency. It is also called the vortex shedding
frequency and calculated by Equation (1.1). And the upper continuous red straight line
represents two times the Strouhal frequency. In the ExxonMobil VIV test, the largest
Reynolds number could be 50000. According to Figure 1.3, the Strouhal number should
be around 0.2. However, according to Larsen and Koushan (2005) [29], for moving
cylinders, the Strouhal number is better to be the value of 0.17.
Figure 5.9: Dominant frequencies for bare riser and uniform flow cases
In uniform flow, the CF dominant frequency increases almost linearly with the
increasing current speed from 1.56 Hz to 15.14Hz. Similar trend is observed for the IL
dominant frequency but it is approximately double the CF one. Besides, you can see that
the response frequency of a vibrating cylinder is slightly lower than the vortex-shedding
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
Bare Riser and Uniform Flow
pf CF
pf IL
fs
2*fs
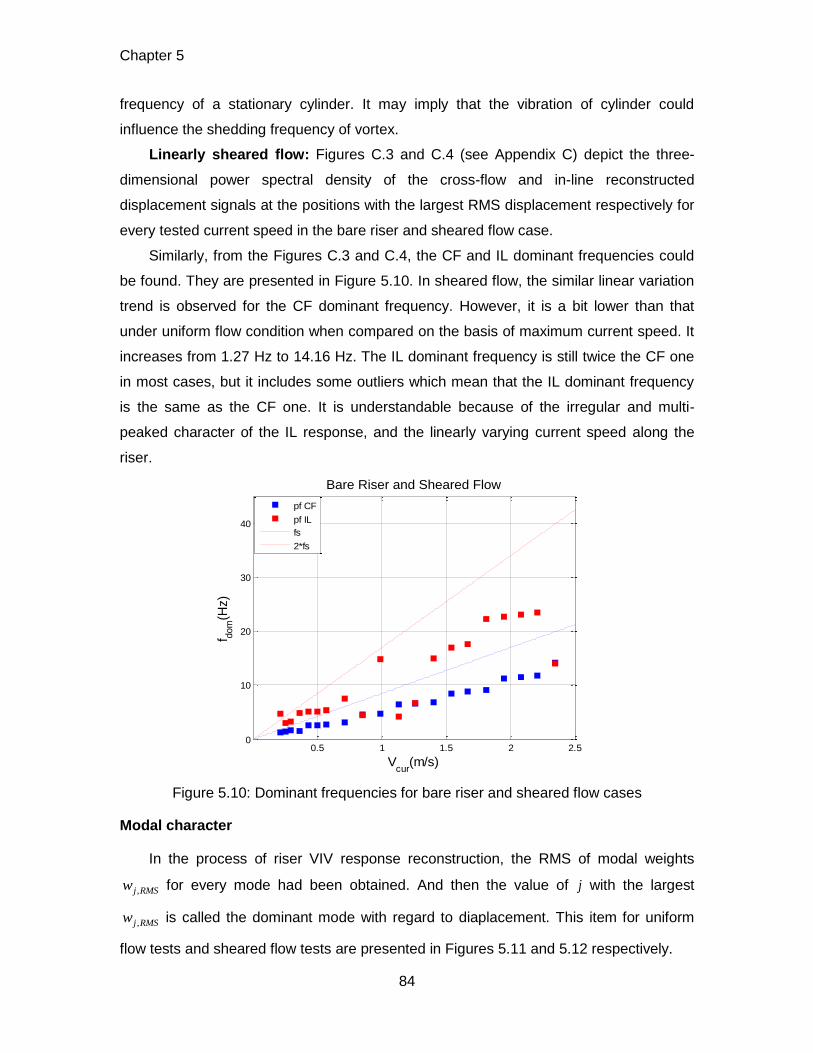
Chapter 5
84
frequency of a stationary cylinder. It may imply that the vibration of cylinder could
influence the shedding frequency of vortex.
Linearly sheared flow: Figures C.3 and C.4 (see Appendix C) depict the three-
dimensional power spectral density of the cross-flow and in-line reconstructed
displacement signals at the positions with the largest RMS displacement respectively for
every tested current speed in the bare riser and sheared flow case.
Similarly, from the Figures C.3 and C.4, the CF and IL dominant frequencies could
be found. They are presented in Figure 5.10. In sheared flow, the similar linear variation
trend is observed for the CF dominant frequency. However, it is a bit lower than that
under uniform flow condition when compared on the basis of maximum current speed. It
increases from 1.27 Hz to 14.16 Hz. The IL dominant frequency is still twice the CF one
in most cases, but it includes some outliers which mean that the IL dominant frequency
is the same as the CF one. It is understandable because of the irregular and multi-
peaked character of the IL response, and the linearly varying current speed along the
riser.
Figure 5.10: Dominant frequencies for bare riser and sheared flow cases
Modal character
In the process of riser VIV response reconstruction, the RMS of modal weights
,j RMSw for every mode had been obtained. And then the value of j with the largest
,j RMSw is called the dominant mode with regard to diaplacement. This item for uniform
flow tests and sheared flow tests are presented in Figures 5.11 and 5.12 respectively.
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
Bare Riser and Sheared Flow
pf CF
pf IL
fs
2*fs
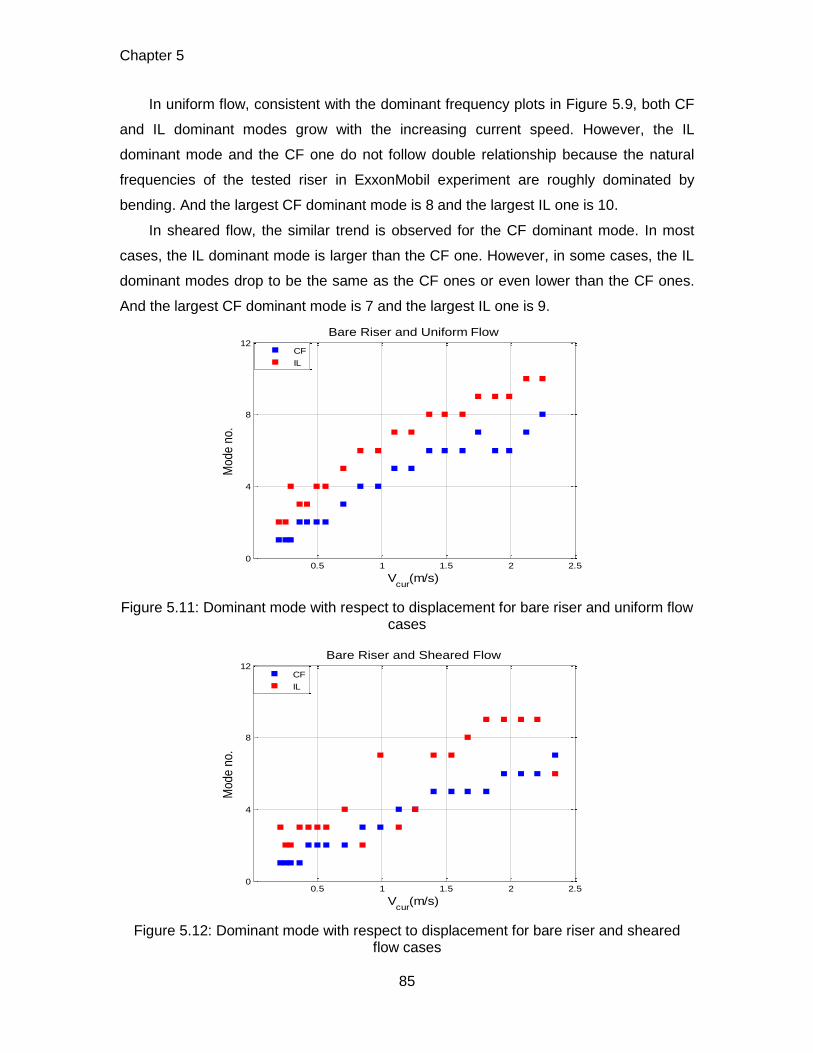
Chapter 5
85
In uniform flow, consistent with the dominant frequency plots in Figure 5.9, both CF
and IL dominant modes grow with the increasing current speed. However, the IL
dominant mode and the CF one do not follow double relationship because the natural
frequencies of the tested riser in ExxonMobil experiment are roughly dominated by
bending. And the largest CF dominant mode is 8 and the largest IL one is 10.
In sheared flow, the similar trend is observed for the CF dominant mode. In most
cases, the IL dominant mode is larger than the CF one. However, in some cases, the IL
dominant modes drop to be the same as the CF ones or even lower than the CF ones.
And the largest CF dominant mode is 7 and the largest IL one is 9.
Figure 5.11: Dominant mode with respect to displacement for bare riser and uniform flow cases
Figure 5.12: Dominant mode with respect to displacement for bare riser and sheared flow cases
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
Bare Riser and Uniform Flow
CF
IL
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
Bare Riser and Sheared Flow
CF
IL
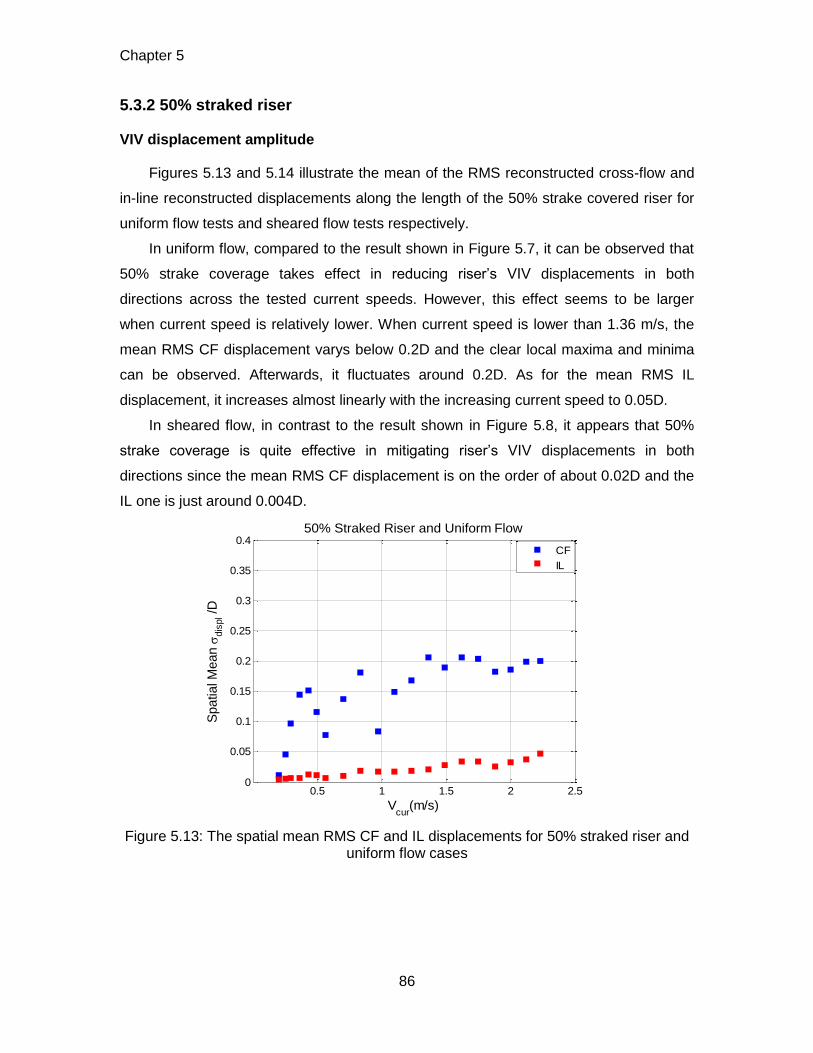
Chapter 5
86
5.3.2 50% straked riser
VIV displacement amplitude
Figures 5.13 and 5.14 illustrate the mean of the RMS reconstructed cross-flow and
in-line reconstructed displacements along the length of the 50% strake covered riser for
uniform flow tests and sheared flow tests respectively.
In uniform flow, compared to the result shown in Figure 5.7, it can be observed that
50% strake coverage takes effect in reducing riser’s VIV displacements in both
directions across the tested current speeds. However, this effect seems to be larger
when current speed is relatively lower. When current speed is lower than 1.36 m/s, the
mean RMS CF displacement varys below 0.2D and the clear local maxima and minima
can be observed. Afterwards, it fluctuates around 0.2D. As for the mean RMS IL
displacement, it increases almost linearly with the increasing current speed to 0.05D.
In sheared flow, in contrast to the result shown in Figure 5.8, it appears that 50%
strake coverage is quite effective in mitigating riser’s VIV displacements in both
directions since the mean RMS CF displacement is on the order of about 0.02D and the
IL one is just around 0.004D.
Figure 5.13: The spatial mean RMS CF and IL displacements for 50% straked riser and uniform flow cases
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
D
50% Straked Riser and Uniform Flow
CF
IL
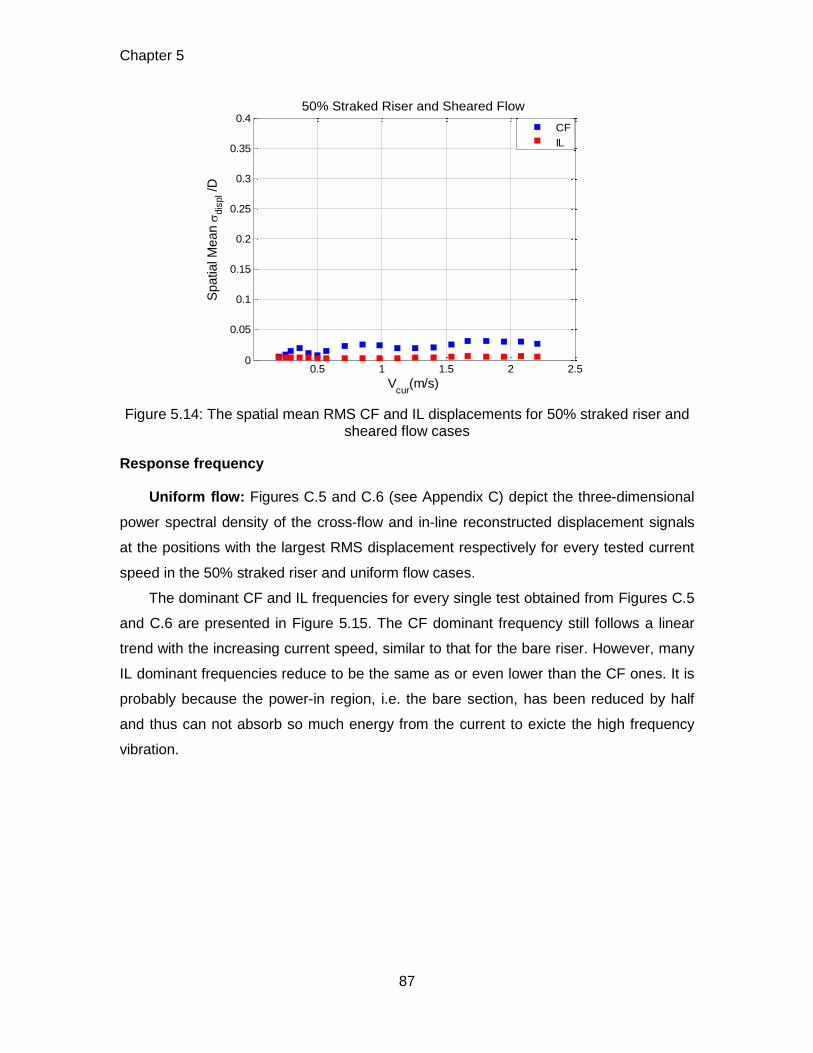
Chapter 5
87
Figure 5.14: The spatial mean RMS CF and IL displacements for 50% straked riser and sheared flow cases
Response frequency
Uniform flow: Figures C.5 and C.6 (see Appendix C) depict the three-dimensional
power spectral density of the cross-flow and in-line reconstructed displacement signals
at the positions with the largest RMS displacement respectively for every tested current
speed in the 50% straked riser and uniform flow cases.
The dominant CF and IL frequencies for every single test obtained from Figures C.5
and C.6 are presented in Figure 5.15. The CF dominant frequency still follows a linear
trend with the increasing current speed, similar to that for the bare riser. However, many
IL dominant frequencies reduce to be the same as or even lower than the CF ones. It is
probably because the power-in region, i.e. the bare section, has been reduced by half
and thus can not absorb so much energy from the current to exicte the high frequency
vibration.
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
D
50% Straked Riser and Sheared Flow
CF
IL
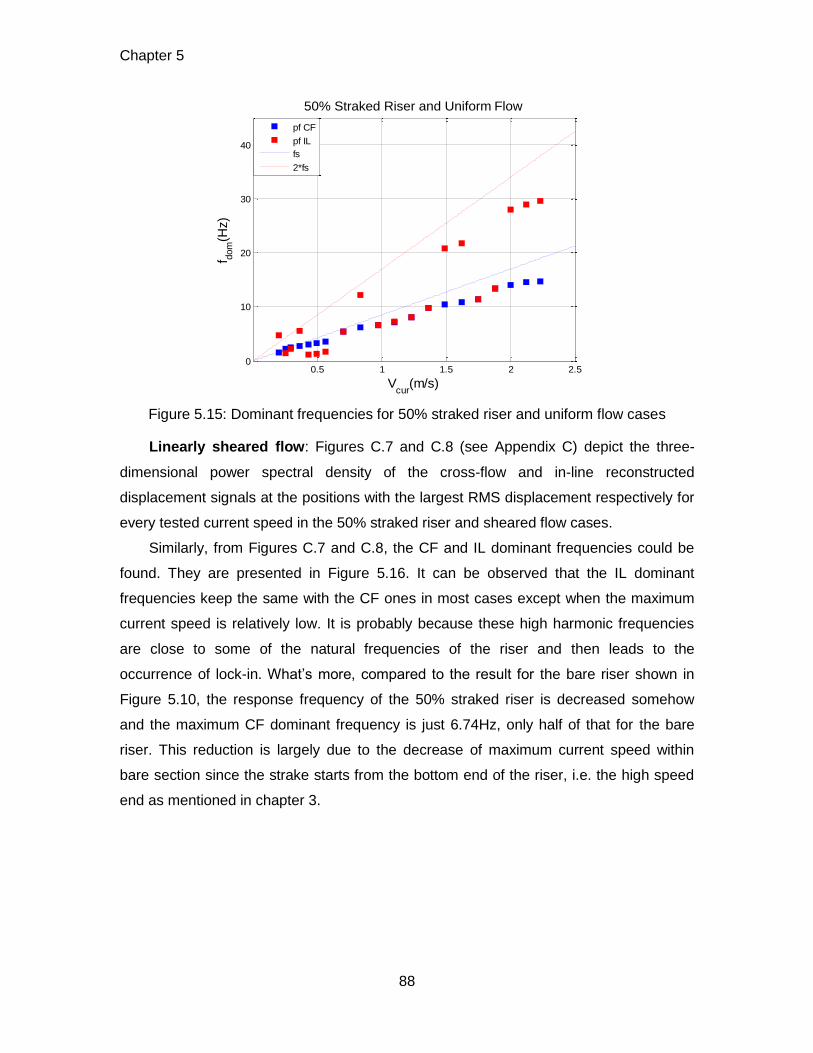
Chapter 5
88
Figure 5.15: Dominant frequencies for 50% straked riser and uniform flow cases
Linearly sheared flow: Figures C.7 and C.8 (see Appendix C) depict the three-
dimensional power spectral density of the cross-flow and in-line reconstructed
displacement signals at the positions with the largest RMS displacement respectively for
every tested current speed in the 50% straked riser and sheared flow cases.
Similarly, from Figures C.7 and C.8, the CF and IL dominant frequencies could be
found. They are presented in Figure 5.16. It can be observed that the IL dominant
frequencies keep the same with the CF ones in most cases except when the maximum
current speed is relatively low. It is probably because these high harmonic frequencies
are close to some of the natural frequencies of the riser and then leads to the
occurrence of lock-in. What’s more, compared to the result for the bare riser shown in
Figure 5.10, the response frequency of the 50% straked riser is decreased somehow
and the maximum CF dominant frequency is just 6.74Hz, only half of that for the bare
riser. This reduction is largely due to the decrease of maximum current speed within
bare section since the strake starts from the bottom end of the riser, i.e. the high speed
end as mentioned in chapter 3.
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
50% Straked Riser and Uniform Flow
pf CF
pf IL
fs
2*fs
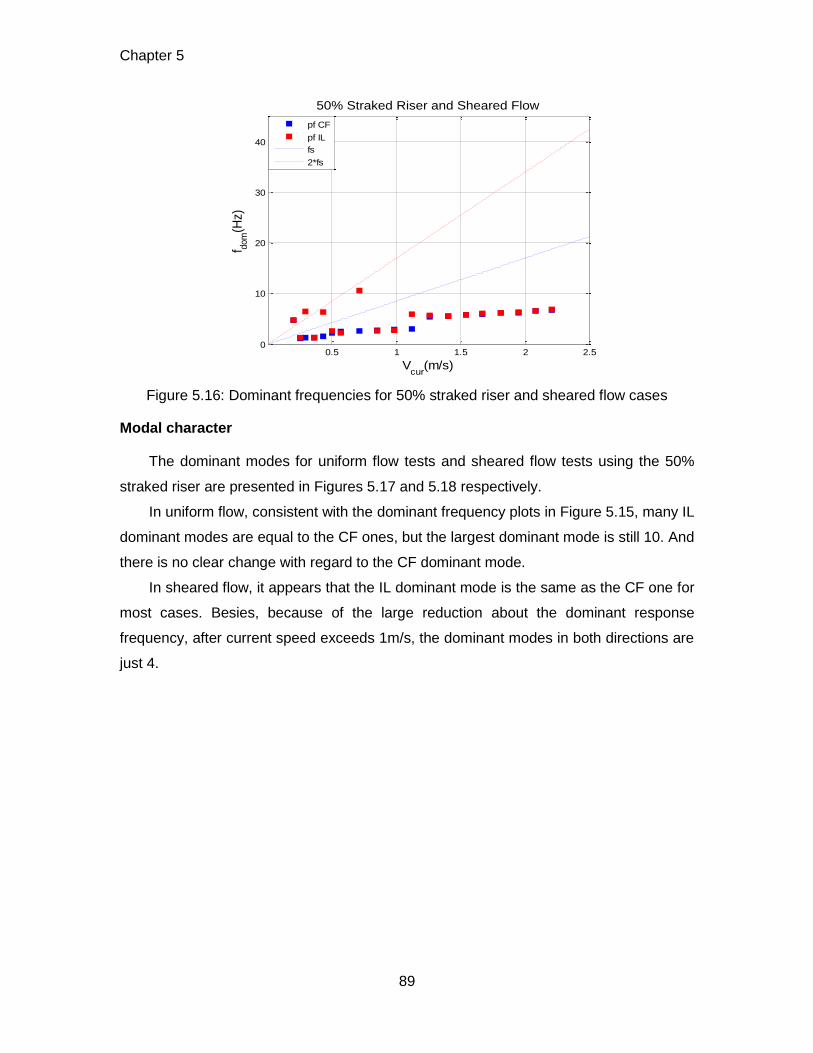
Chapter 5
89
Figure 5.16: Dominant frequencies for 50% straked riser and sheared flow cases
Modal character
The dominant modes for uniform flow tests and sheared flow tests using the 50%
straked riser are presented in Figures 5.17 and 5.18 respectively.
In uniform flow, consistent with the dominant frequency plots in Figure 5.15, many IL
dominant modes are equal to the CF ones, but the largest dominant mode is still 10. And
there is no clear change with regard to the CF dominant mode.
In sheared flow, it appears that the IL dominant mode is the same as the CF one for
most cases. Besies, because of the large reduction about the dominant response
frequency, after current speed exceeds 1m/s, the dominant modes in both directions are
just 4.
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
50% Straked Riser and Sheared Flow
pf CF
pf IL
fs
2*fs
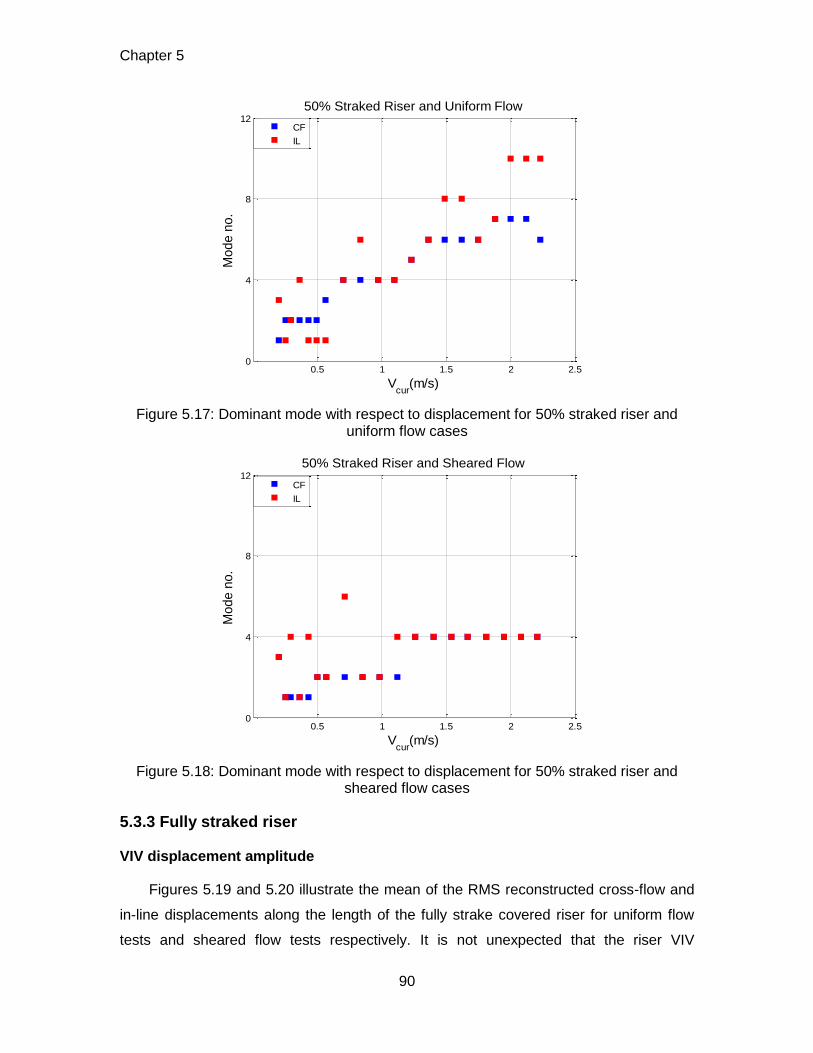
Chapter 5
90
Figure 5.17: Dominant mode with respect to displacement for 50% straked riser and uniform flow cases
Figure 5.18: Dominant mode with respect to displacement for 50% straked riser and sheared flow cases
5.3.3 Fully straked riser
VIV displacement amplitude
Figures 5.19 and 5.20 illustrate the mean of the RMS reconstructed cross-flow and
in-line displacements along the length of the fully strake covered riser for uniform flow
tests and sheared flow tests respectively. It is not unexpected that the riser VIV
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
50% Straked Riser and Uniform Flow
CF
IL
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
50% Straked Riser and Sheared Flow
CF
IL
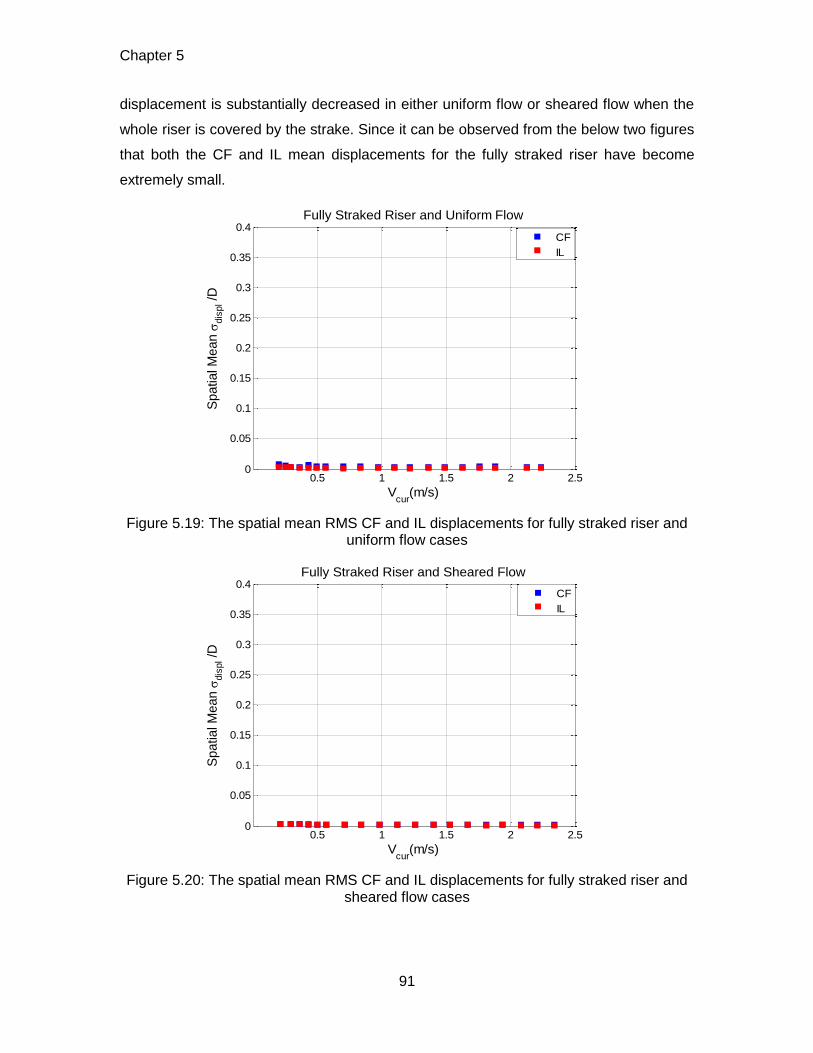
Chapter 5
91
displacement is substantially decreased in either uniform flow or sheared flow when the
whole riser is covered by the strake. Since it can be observed from the below two figures
that both the CF and IL mean displacements for the fully straked riser have become
extremely small.
Figure 5.19: The spatial mean RMS CF and IL displacements for fully straked riser and uniform flow cases
Figure 5.20: The spatial mean RMS CF and IL displacements for fully straked riser and sheared flow cases
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
DFully Straked Riser and Uniform Flow
CF
IL
0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Vcur
(m/s)
Spatial M
ean
dis
pl /
D
Fully Straked Riser and Sheared Flow
CF
IL
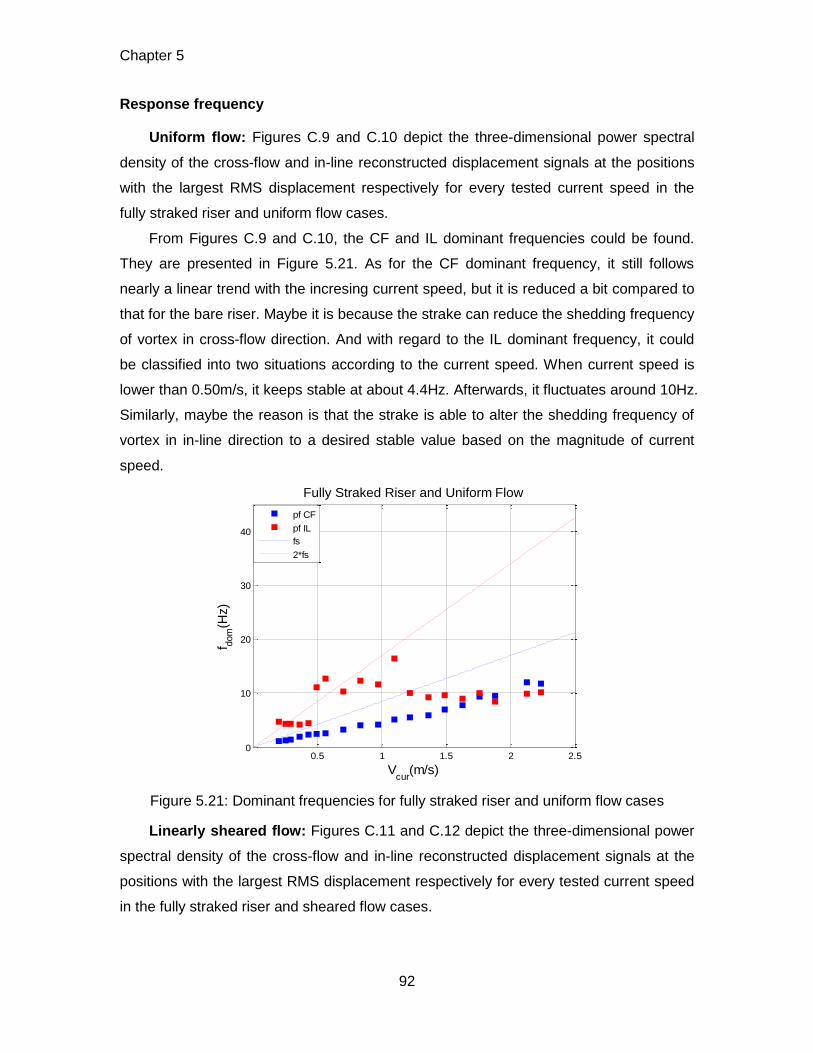
Chapter 5
92
Response frequency
Uniform flow: Figures C.9 and C.10 depict the three-dimensional power spectral
density of the cross-flow and in-line reconstructed displacement signals at the positions
with the largest RMS displacement respectively for every tested current speed in the
fully straked riser and uniform flow cases.
From Figures C.9 and C.10, the CF and IL dominant frequencies could be found.
They are presented in Figure 5.21. As for the CF dominant frequency, it still follows
nearly a linear trend with the incresing current speed, but it is reduced a bit compared to
that for the bare riser. Maybe it is because the strake can reduce the shedding frequency
of vortex in cross-flow direction. And with regard to the IL dominant frequency, it could
be classified into two situations according to the current speed. When current speed is
lower than 0.50m/s, it keeps stable at about 4.4Hz. Afterwards, it fluctuates around 10Hz.
Similarly, maybe the reason is that the strake is able to alter the shedding frequency of
vortex in in-line direction to a desired stable value based on the magnitude of current
speed.
Figure 5.21: Dominant frequencies for fully straked riser and uniform flow cases
Linearly sheared flow: Figures C.11 and C.12 depict the three-dimensional power
spectral density of the cross-flow and in-line reconstructed displacement signals at the
positions with the largest RMS displacement respectively for every tested current speed
in the fully straked riser and sheared flow cases.
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
Fully Straked Riser and Uniform Flow
pf CF
pf IL
fs
2*fs
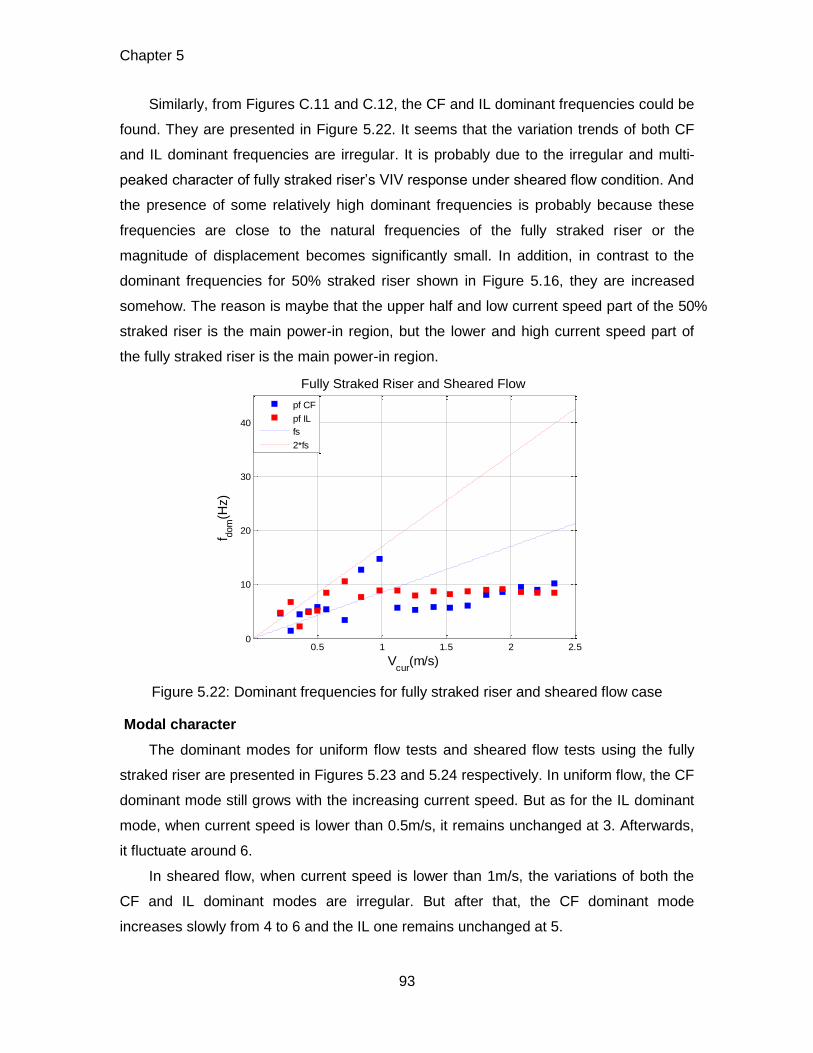
Chapter 5
93
Similarly, from Figures C.11 and C.12, the CF and IL dominant frequencies could be
found. They are presented in Figure 5.22. It seems that the variation trends of both CF
and IL dominant frequencies are irregular. It is probably due to the irregular and multi-
peaked character of fully straked riser’s VIV response under sheared flow condition. And
the presence of some relatively high dominant frequencies is probably because these
frequencies are close to the natural frequencies of the fully straked riser or the
magnitude of displacement becomes significantly small. In addition, in contrast to the
dominant frequencies for 50% straked riser shown in Figure 5.16, they are increased
somehow. The reason is maybe that the upper half and low current speed part of the 50%
straked riser is the main power-in region, but the lower and high current speed part of
the fully straked riser is the main power-in region.
Figure 5.22: Dominant frequencies for fully straked riser and sheared flow case
Modal character
The dominant modes for uniform flow tests and sheared flow tests using the fully
straked riser are presented in Figures 5.23 and 5.24 respectively. In uniform flow, the CF
dominant mode still grows with the increasing current speed. But as for the IL dominant
mode, when current speed is lower than 0.5m/s, it remains unchanged at 3. Afterwards,
it fluctuate around 6.
In sheared flow, when current speed is lower than 1m/s, the variations of both the
CF and IL dominant modes are irregular. But after that, the CF dominant mode
increases slowly from 4 to 6 and the IL one remains unchanged at 5.
0.5 1 1.5 2 2.50
10
20
30
40
Vcur
(m/s)
f dom
(Hz)
Fully Straked Riser and Sheared Flow
pf CF
pf IL
fs
2*fs
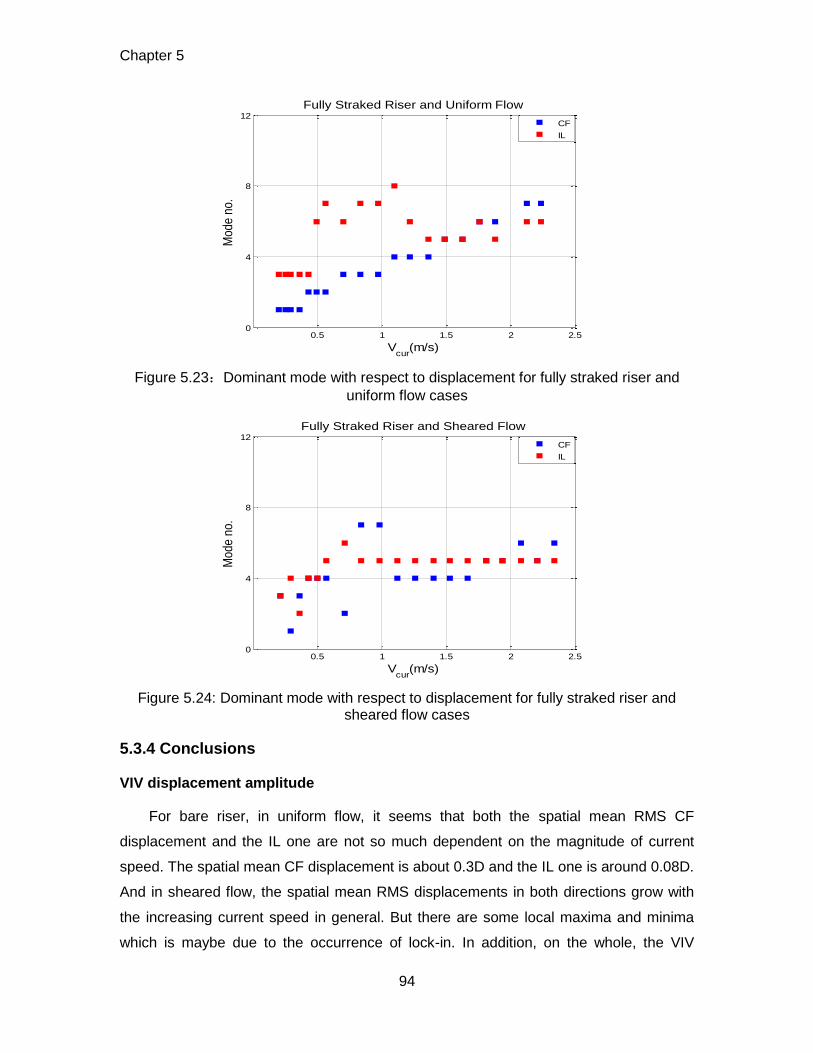
Chapter 5
94
Figure 5.23:Dominant mode with respect to displacement for fully straked riser and
uniform flow cases
Figure 5.24: Dominant mode with respect to displacement for fully straked riser and sheared flow cases
5.3.4 Conclusions
VIV displacement amplitude
For bare riser, in uniform flow, it seems that both the spatial mean RMS CF
displacement and the IL one are not so much dependent on the magnitude of current
speed. The spatial mean CF displacement is about 0.3D and the IL one is around 0.08D.
And in sheared flow, the spatial mean RMS displacements in both directions grow with
the increasing current speed in general. But there are some local maxima and minima
which is maybe due to the occurrence of lock-in. In addition, on the whole, the VIV
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
Fully Straked Riser and Uniform Flow
CF
IL
0.5 1 1.5 2 2.50
4
8
12
Vcur
(m/s)
Mode n
o.
Fully Straked Riser and Sheared Flow
CF
IL
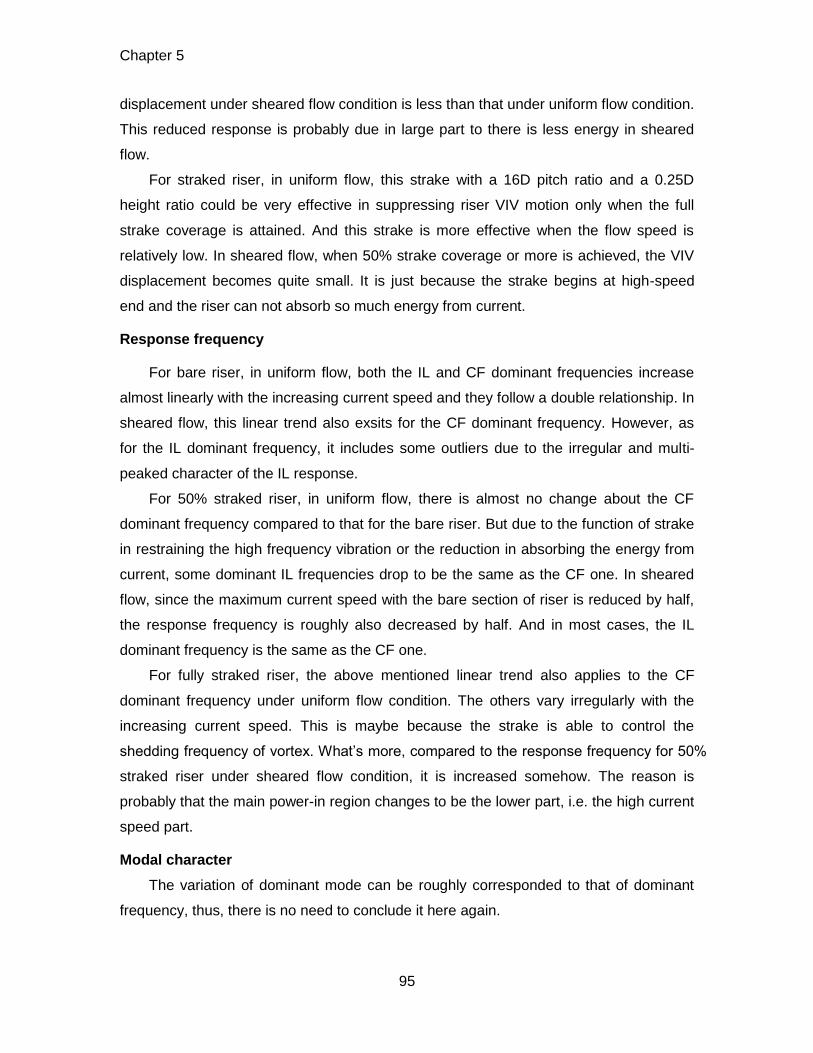
Chapter 5
95
displacement under sheared flow condition is less than that under uniform flow condition.
This reduced response is probably due in large part to there is less energy in sheared
flow.
For straked riser, in uniform flow, this strake with a 16D pitch ratio and a 0.25D
height ratio could be very effective in suppressing riser VIV motion only when the full
strake coverage is attained. And this strake is more effective when the flow speed is
relatively low. In sheared flow, when 50% strake coverage or more is achieved, the VIV
displacement becomes quite small. It is just because the strake begins at high-speed
end and the riser can not absorb so much energy from current.
Response frequency
For bare riser, in uniform flow, both the IL and CF dominant frequencies increase
almost linearly with the increasing current speed and they follow a double relationship. In
sheared flow, this linear trend also exsits for the CF dominant frequency. However, as
for the IL dominant frequency, it includes some outliers due to the irregular and multi-
peaked character of the IL response.
For 50% straked riser, in uniform flow, there is almost no change about the CF
dominant frequency compared to that for the bare riser. But due to the function of strake
in restraining the high frequency vibration or the reduction in absorbing the energy from
current, some dominant IL frequencies drop to be the same as the CF one. In sheared
flow, since the maximum current speed with the bare section of riser is reduced by half,
the response frequency is roughly also decreased by half. And in most cases, the IL
dominant frequency is the same as the CF one.
For fully straked riser, the above mentioned linear trend also applies to the CF
dominant frequency under uniform flow condition. The others vary irregularly with the
increasing current speed. This is maybe because the strake is able to control the
shedding frequency of vortex. What’s more, compared to the response frequency for 50%
straked riser under sheared flow condition, it is increased somehow. The reason is
probably that the main power-in region changes to be the lower part, i.e. the high current
speed part.
Modal character
The variation of dominant mode can be roughly corresponded to that of dominant
frequency, thus, there is no need to conclude it here again.
Chapter 6
96
Chapter 6
6 Riser VIV response reconstruction
of the second Gulf Stream VIV test
6.1 Characteristics of the second Gulf Stream VIV test
6.1.1 Characteristics of tested pipe
The tested pipe in the second Gulf Stream VIV test is quite different from that used
in the ExxonMobil VIV test. One is that this pipe was not straight and was deflected
during the test. Another is that the natural frequency of this pipe is absolutely dominated
by tension and this pipe may undergo very high mode number VIV motion.
Deflected shape
When the test did not start, the pipe hung vertically and remained straight. And
when the pipe was towed by the boat, the current drag force on the pipe would cause
the pipe to deflect, which would then cause the railroad wheel on the bottom end of the
pipe to move aft and lift. In this experiment, a depth gauge was attached to the bottom
railroad wheel to aid in finding the deflected shape of the pipe. Figure 6.1 shows the
depth of railroad wheel, as measured by the depth gauge, versus the top angle,
measured by the tilt meter on the top of the pipe. Since the top inclination angle is
another measurement of the deflection of the pipe, the depth and the top tilt angle
should be related. Using a second order polynomial to fit all the data from the bare pipe
tests, Equation (6.1) was found:
20.0417( ) 0.3274( ) 494.18Depth tilt tilt (6.1)
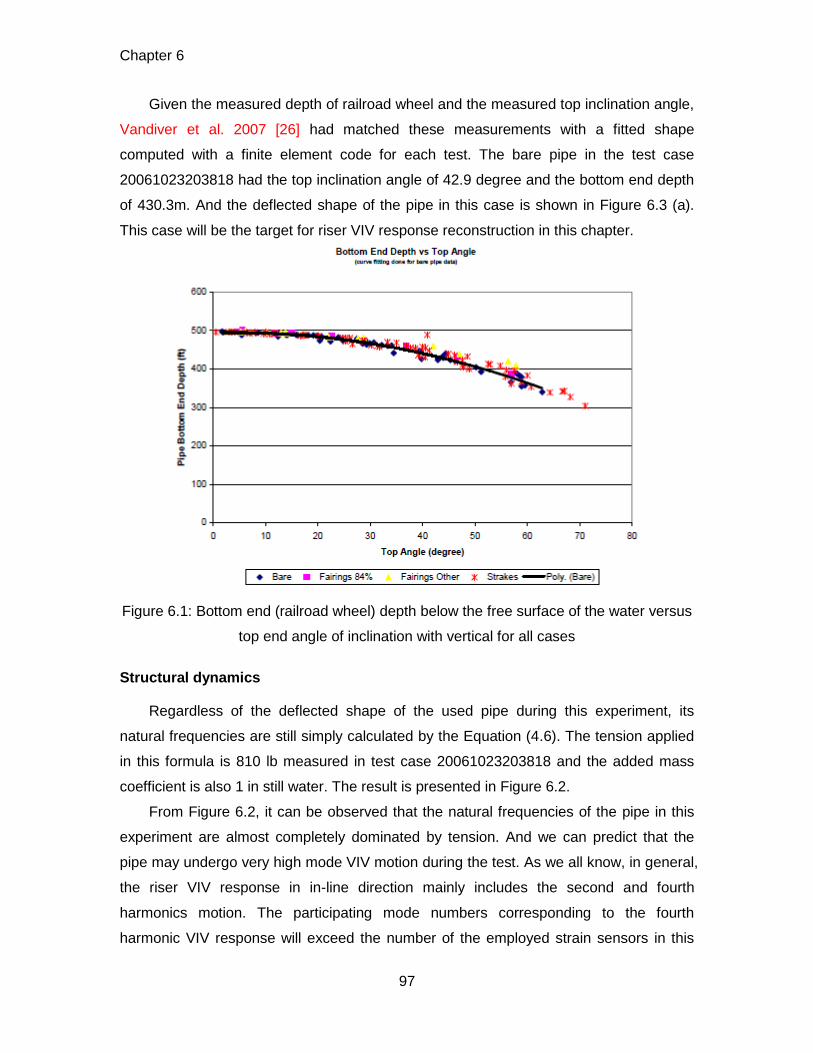
Chapter 6
97
Given the measured depth of railroad wheel and the measured top inclination angle,
Vandiver et al. 2007 [26] had matched these measurements with a fitted shape
computed with a finite element code for each test. The bare pipe in the test case
20061023203818 had the top inclination angle of 42.9 degree and the bottom end depth
of 430.3m. And the deflected shape of the pipe in this case is shown in Figure 6.3 (a).
This case will be the target for riser VIV response reconstruction in this chapter.
Figure 6.1: Bottom end (railroad wheel) depth below the free surface of the water versus
top end angle of inclination with vertical for all cases
Structural dynamics
Regardless of the deflected shape of the used pipe during this experiment, its
natural frequencies are still simply calculated by the Equation (4.6). The tension applied
in this formula is 810 lb measured in test case 20061023203818 and the added mass
coefficient is also 1 in still water. The result is presented in Figure 6.2.
From Figure 6.2, it can be observed that the natural frequencies of the pipe in this
experiment are almost completely dominated by tension. And we can predict that the
pipe may undergo very high mode VIV motion during the test. As we all know, in general,
the riser VIV response in in-line direction mainly includes the second and fourth
harmonics motion. The participating mode numbers corresponding to the fourth
harmonic VIV response will exceed the number of the employed strain sensors in this
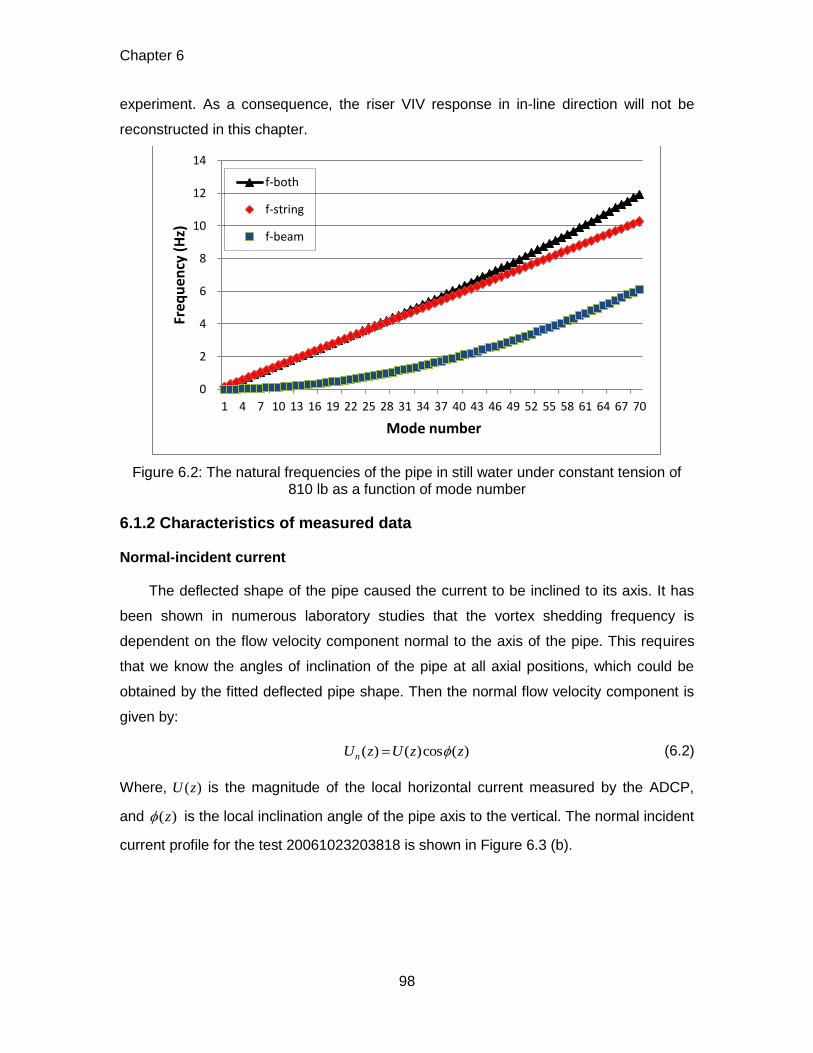
Chapter 6
98
experiment. As a consequence, the riser VIV response in in-line direction will not be
reconstructed in this chapter.
Figure 6.2: The natural frequencies of the pipe in still water under constant tension of 810 lb as a function of mode number
6.1.2 Characteristics of measured data
Normal-incident current
The deflected shape of the pipe caused the current to be inclined to its axis. It has
been shown in numerous laboratory studies that the vortex shedding frequency is
dependent on the flow velocity component normal to the axis of the pipe. This requires
that we know the angles of inclination of the pipe at all axial positions, which could be
obtained by the fitted deflected pipe shape. Then the normal flow velocity component is
given by:
( ) ( )cos ( )nU z U z z (6.2)
Where, ( )U z is the magnitude of the local horizontal current measured by the ADCP,
and ( )z is the local inclination angle of the pipe axis to the vertical. The normal incident
current profile for the test 20061023203818 is shown in Figure 6.3 (b).
0
2
4
6
8
10
12
14
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55 58 61 64 67 70
Freq
uen
cy (
Hz)
Mode number
f-both
f-string
f-beam
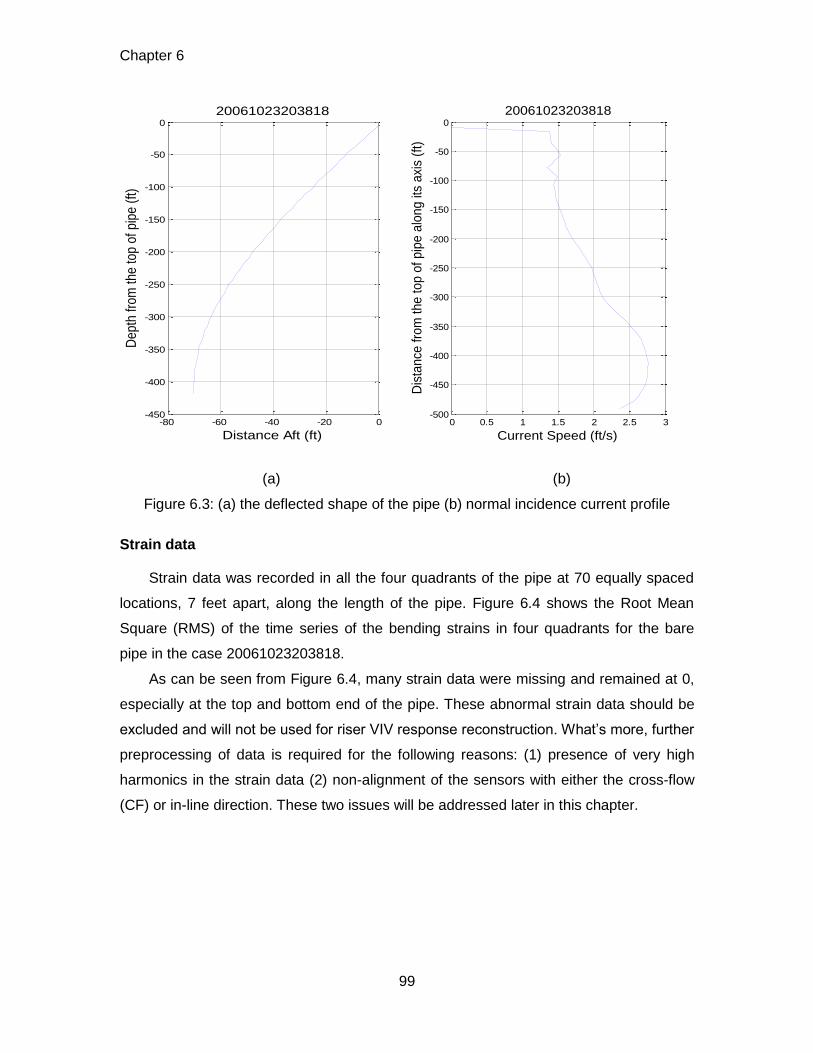
Chapter 6
99
(a) (b)
Figure 6.3: (a) the deflected shape of the pipe (b) normal incidence current profile
Strain data
Strain data was recorded in all the four quadrants of the pipe at 70 equally spaced
locations, 7 feet apart, along the length of the pipe. Figure 6.4 shows the Root Mean
Square (RMS) of the time series of the bending strains in four quadrants for the bare
pipe in the case 20061023203818.
As can be seen from Figure 6.4, many strain data were missing and remained at 0,
especially at the top and bottom end of the pipe. These abnormal strain data should be
excluded and will not be used for riser VIV response reconstruction. What’s more, further
preprocessing of data is required for the following reasons: (1) presence of very high
harmonics in the strain data (2) non-alignment of the sensors with either the cross-flow
(CF) or in-line direction. These two issues will be addressed later in this chapter.
-80 -60 -40 -20 0-450
-400
-350
-300
-250
-200
-150
-100
-50
0D
epth
from
the
top
of p
ipe
(ft)
Distance Aft (ft)
20061023203818
0 0.5 1 1.5 2 2.5 3-500
-450
-400
-350
-300
-250
-200
-150
-100
-50
0
Dis
tance
fro
m the t
op o
f pip
e a
long it
s axi
s (f
t)
Current Speed (ft/s)
20061023203818
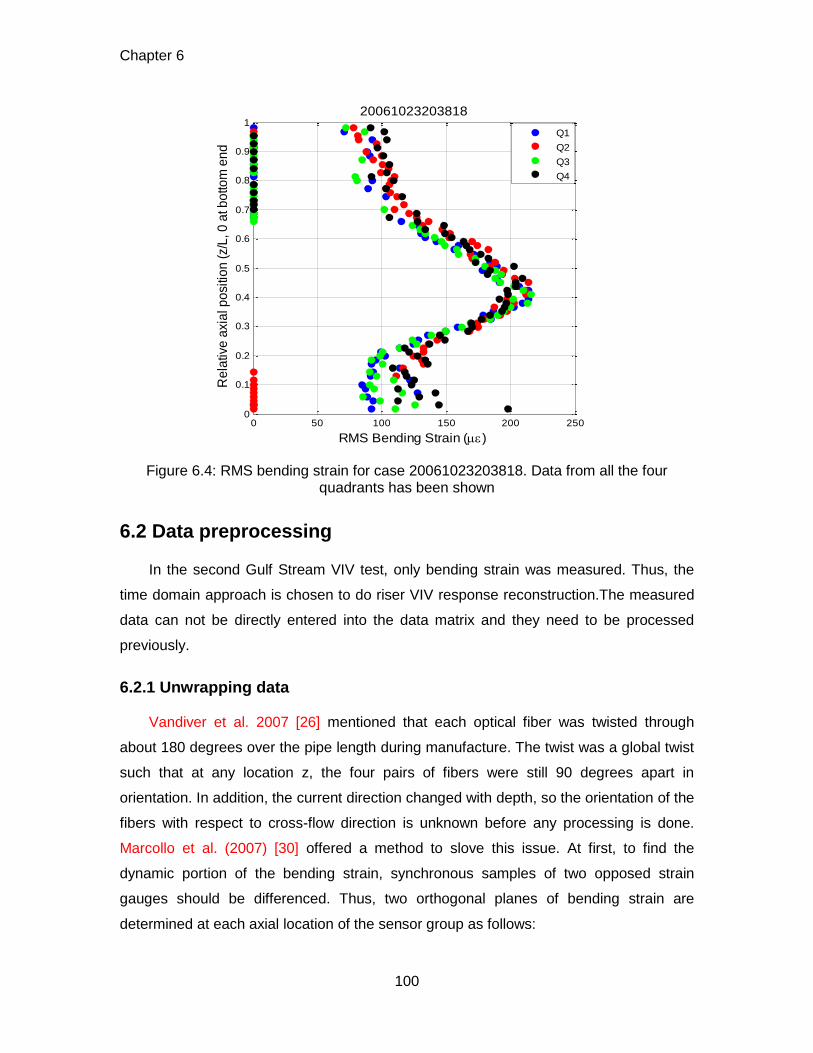
Chapter 6
100
Figure 6.4: RMS bending strain for case 20061023203818. Data from all the four quadrants has been shown
6.2 Data preprocessing
In the second Gulf Stream VIV test, only bending strain was measured. Thus, the
time domain approach is chosen to do riser VIV response reconstruction.The measured
data can not be directly entered into the data matrix and they need to be processed
previously.
6.2.1 Unwrapping data
Vandiver et al. 2007 [26] mentioned that each optical fiber was twisted through
about 180 degrees over the pipe length during manufacture. The twist was a global twist
such that at any location z, the four pairs of fibers were still 90 degrees apart in
orientation. In addition, the current direction changed with depth, so the orientation of the
fibers with respect to cross-flow direction is unknown before any processing is done.
Marcollo et al. (2007) [30] offered a method to slove this issue. At first, to find the
dynamic portion of the bending strain, synchronous samples of two opposed strain
gauges should be differenced. Thus, two orthogonal planes of bending strain are
determined at each axial location of the sensor group as follows:
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lativ
e a
xia
l po
siti
on
(z/L
, 0
at b
otto
m e
nd
RMS Bending Strain ()
20061023203818
Q1
Q2
Q3
Q4
Chapter 6
101
1 3( , ) ( , )( , )
2x
z t z tz t
(6.3)
2 4( , ) ( , )( , )
2y
z t z tz t
(6.4)
Where, x and y are the orthogonal dynamic bending strains from the respective
quadrants [Q1,Q3] and [Q2,Q4] at the position z along the length of the riser at time t .
And then, in order to find the cross-flow component of bending strain, we need to
assume an angle , which is the angle by which the Q1-Q3 plane must be rotated to
line up with the true cross-flow direction, for each senor’s location. Then the true cross-
flow bending strain can be computed as follow:
cos( ) sin( )CF x y (6.5)
Prior to find the unique angle of rotation at each sensor location, the spectral
analysis was done with the strain data in case 20061023203818 to find that the first
peak frequency of the VIV response in this case is 3.45 Hz. Since then, the first peak
frequency is denoted by 1X frequency. As we all know, the primary cross-flow response
frequencies contain 1X frequency and odd multipes of this. Hence, for each sensor
location, when the Q1-Q3 differential strain data is rotated by the desired angle, the PSD
of the cross-flow bending strain in Equation (6.5) should show a maximum value at 1X
frequency. In order to find the unique desired rotation angle at every sensor position
along the riser, the angle was valued in turn from 0° to 360° in 1°increments and the
PSD of the cross-flow bending strain for every possible rotation angle was calculated. It
is noted that we should only pay attention to the PSD in the narrow band around 3.45 Hz
since the maximum value would occur in this band at the desired angle which rotates the
Q1-Q3 plane into the true cross-flow direction.
The results of this analysis are presented in Figure D.1 (see Appendix D). The
horizontal axis is the rotation angle, the vertical axis is the sensor number down the pipe
and the color represents the intensity of the PSD. From this figure, it can be seen that
the rotation angle of Q1-Q3 plane increases gradually from about 75° at the top of the
riser to 265° at the bottom. In addition, the measured data about current direction in this
case shows that the current was almost unidirectional in depth, so it means that the
fibers in the pipe were indeed twisted through about 180 degrees over the pipe length
during manufacture. Using these unique angles of rotation to ‘unwrap’ the differential
strain data, the cross-flow bending strain at every sensor location could be obtained. The
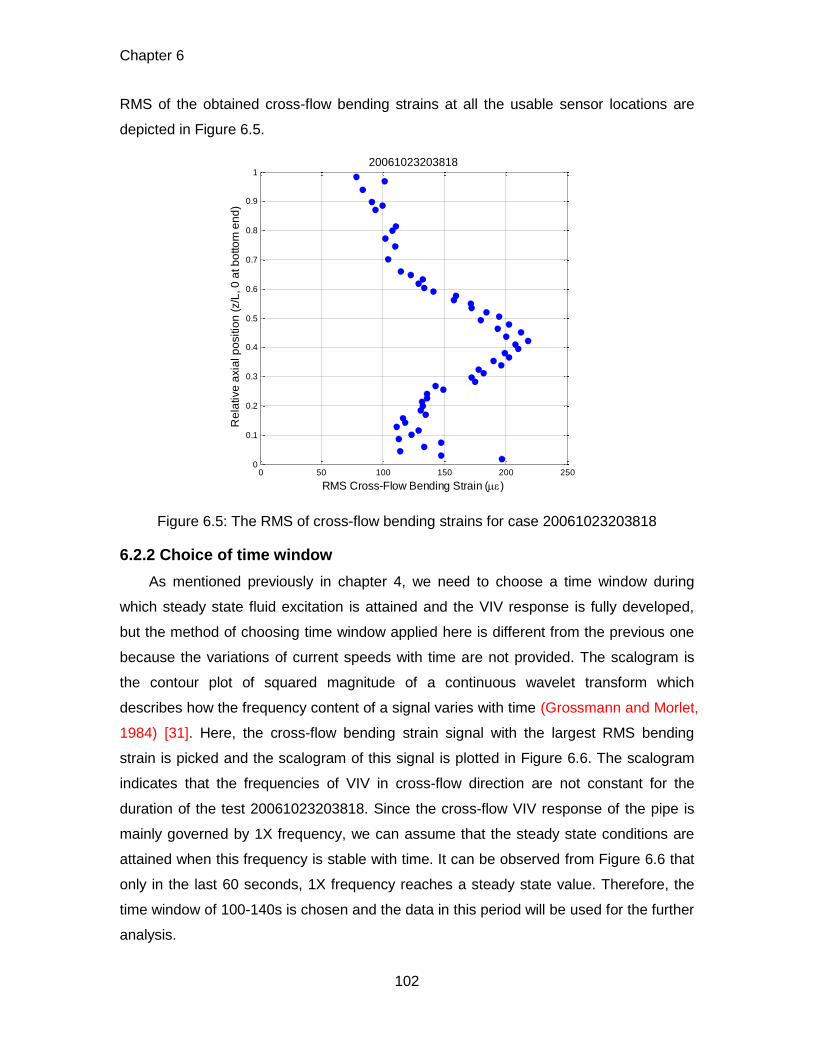
Chapter 6
102
RMS of the obtained cross-flow bending strains at all the usable sensor locations are
depicted in Figure 6.5.
Figure 6.5: The RMS of cross-flow bending strains for case 20061023203818
6.2.2 Choice of time window
As mentioned previously in chapter 4, we need to choose a time window during
which steady state fluid excitation is attained and the VIV response is fully developed,
but the method of choosing time window applied here is different from the previous one
because the variations of current speeds with time are not provided. The scalogram is
the contour plot of squared magnitude of a continuous wavelet transform which
describes how the frequency content of a signal varies with time (Grossmann and Morlet,
1984) [31]. Here, the cross-flow bending strain signal with the largest RMS bending
strain is picked and the scalogram of this signal is plotted in Figure 6.6. The scalogram
indicates that the frequencies of VIV in cross-flow direction are not constant for the
duration of the test 20061023203818. Since the cross-flow VIV response of the pipe is
mainly governed by 1X frequency, we can assume that the steady state conditions are
attained when this frequency is stable with time. It can be observed from Figure 6.6 that
only in the last 60 seconds, 1X frequency reaches a steady state value. Therefore, the
time window of 100-140s is chosen and the data in this period will be used for the further
analysis.
0 50 100 150 200 2500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
RMS Cross-Flow Bending Strain ()
20061023203818
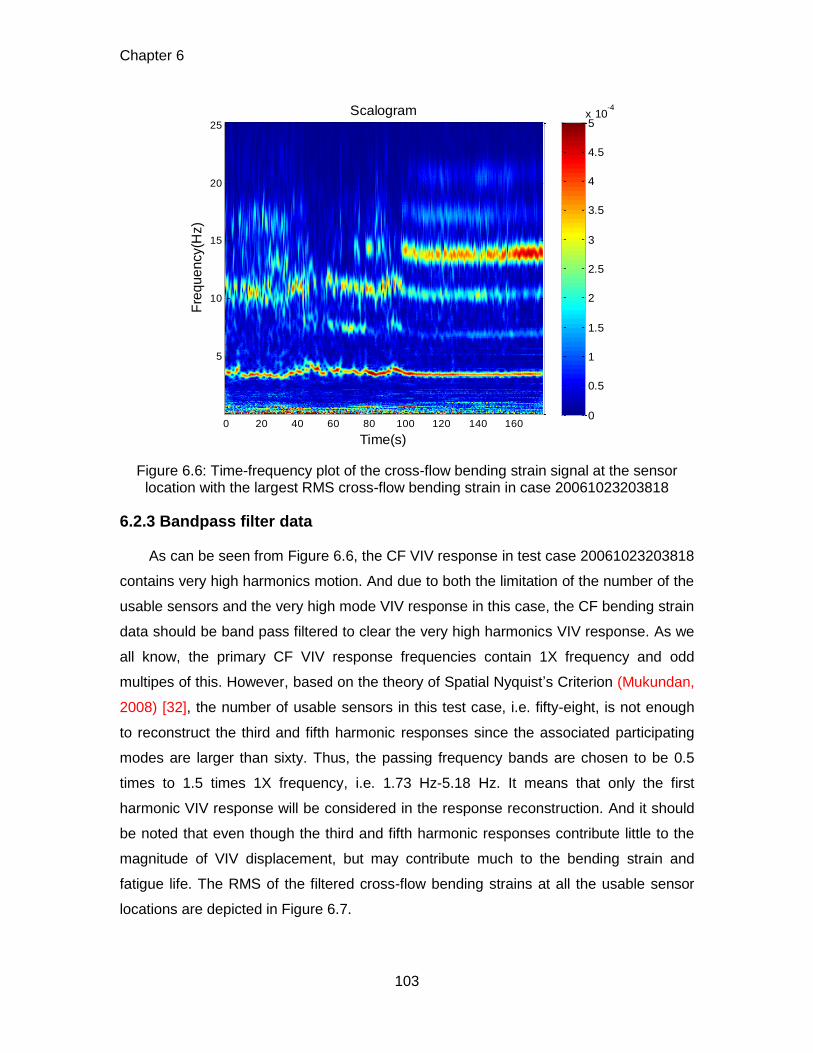
Chapter 6
103
Figure 6.6: Time-frequency plot of the cross-flow bending strain signal at the sensor location with the largest RMS cross-flow bending strain in case 20061023203818
6.2.3 Bandpass filter data
As can be seen from Figure 6.6, the CF VIV response in test case 20061023203818
contains very high harmonics motion. And due to both the limitation of the number of the
usable sensors and the very high mode VIV response in this case, the CF bending strain
data should be band pass filtered to clear the very high harmonics VIV response. As we
all know, the primary CF VIV response frequencies contain 1X frequency and odd
multipes of this. However, based on the theory of Spatial Nyquist’s Criterion (Mukundan,
2008) [32], the number of usable sensors in this test case, i.e. fifty-eight, is not enough
to reconstruct the third and fifth harmonic responses since the associated participating
modes are larger than sixty. Thus, the passing frequency bands are chosen to be 0.5
times to 1.5 times 1X frequency, i.e. 1.73 Hz-5.18 Hz. It means that only the first
harmonic VIV response will be considered in the response reconstruction. And it should
be noted that even though the third and fifth harmonic responses contribute little to the
magnitude of VIV displacement, but may contribute much to the bending strain and
fatigue life. The RMS of the filtered cross-flow bending strains at all the usable sensor
locations are depicted in Figure 6.7.
Time(s)
Fre
qu
en
cy(H
z)
Scalogram
0 20 40 60 80 100 120 140 160
5
10
15
20
25
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-4
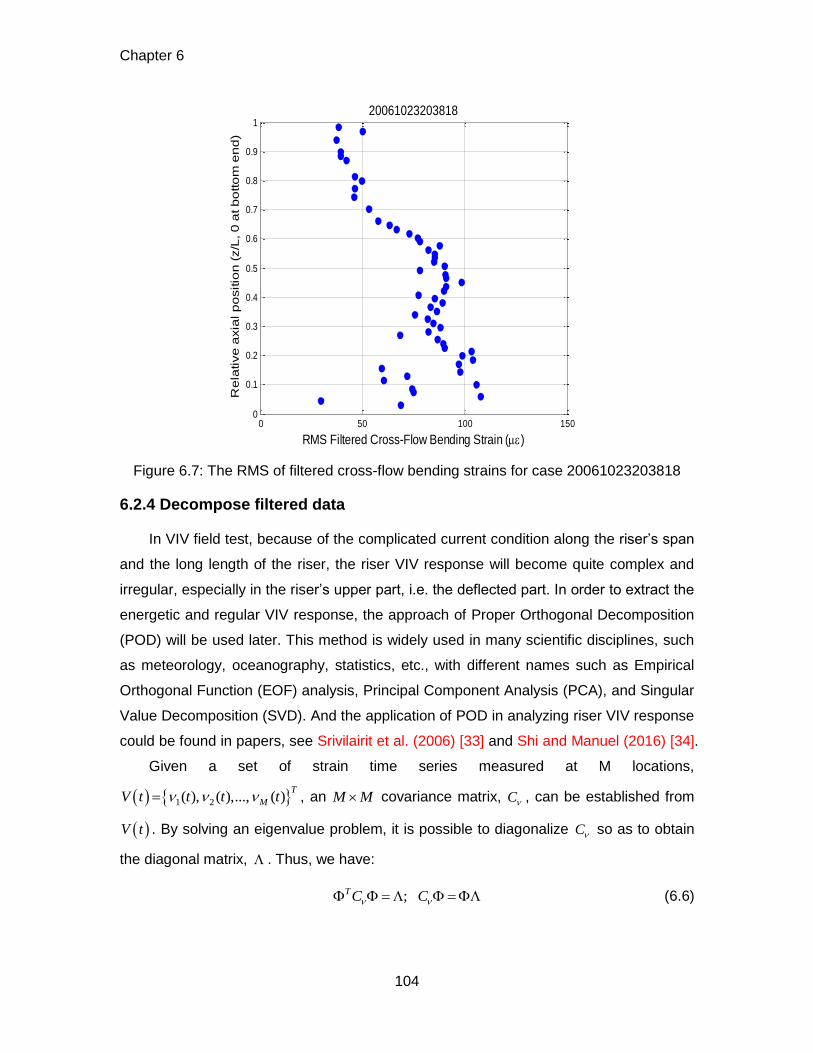
Chapter 6
104
Figure 6.7: The RMS of filtered cross-flow bending strains for case 20061023203818
6.2.4 Decompose filtered data
In VIV field test, because of the complicated current condition along the riser’s span
and the long length of the riser, the riser VIV response will become quite complex and
irregular, especially in the riser’s upper part, i.e. the deflected part. In order to extract the
energetic and regular VIV response, the approach of Proper Orthogonal Decomposition
(POD) will be used later. This method is widely used in many scientific disciplines, such
as meteorology, oceanography, statistics, etc., with different names such as Empirical
Orthogonal Function (EOF) analysis, Principal Component Analysis (PCA), and Singular
Value Decomposition (SVD). And the application of POD in analyzing riser VIV response
could be found in papers, see Srivilairit et al. (2006) [33] and Shi and Manuel (2016) [34].
Given a set of strain time series measured at M locations,
1 2( ), ( ),..., ( )T
MV t t t t , an M M covariance matrix, C , can be established from
V t . By solving an eigenvalue problem, it is possible to diagonalize C so as to obtain
the diagonal matrix, . Thus, we have:
;TC C (6.6)
0 50 100 1500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
RMS Filtered Cross-Flow Bending Strain ()
20061023203818
Chapter 6
105
Solution of the eigenvalue problem yields eigenvalues, 1 2{ , ,..., } { }M diag ,
where 1 2 ... M , and corresponding eigenvectors, 1 2, ,..., M .
It is now possible to rewrite the original M correlated time series, V t , in terms of
uncorrelated scalar subprocesses, 1 2( ) ( ), ( ),..., ( )T
MU t u t u t u t ,such that
1
( ) ( ) ( )M
j j
j
V t U t u t
(6.7)
Where, j represents the jth POD mode shape associated with the jth scalar subprocess,
( )ju t . The energy associated with ( )ju t is described in terms of the associated
eigenvalue, j .
For the test case 20061023203818, the number of usable sensors is fifty-eight.
Thus, following the above described procedure, fifty-eight POD mode shapes, j , can be
obtained and the original fifty-eight CF bending strain time series can be decomposed
into fifty-eight uncorrelated POD scalar subprocesses, ( )ju t . That is to say, the original
one set of strain time series is decomposed into fifty-eight sets of strain time series.
Ranking the energies represented by these POD modes according to their associated
eigenvalues, the first two POD modes account for 47.5% and 36.7% of the total energy
respectively. The first nine POD modes, which account for about 95% of the total energy,
are retained for the later riser VIV response reconstruction and the rest is discarded.
Thus, the matrix in Equation (6.7), ( )V t , can be reduced to ˆ( )V t , which only includes the
first nine POD modes and corresponding subprocesses. Next, the responses in all the
components of ˆ( )V t , i.e. ( )j ju t , j=1 to 9, will be reconstructed separately and then the
nine individual reconstruction results will be added up to obtain the final result. It is
practicable because the POD is a linear decomposition.
9
1
ˆ( ) ( )j j
j
V t u t
(6.8)
The PSD of the first nine POD subprocesses, ( )ju t , j=1 to 9, are depicted in Figure
6.8. They are normalized by the maximum value in all the PSD. As can be seen clearly
from this figure, the first two POD subprocesses account for the large fraction of the total
energy.
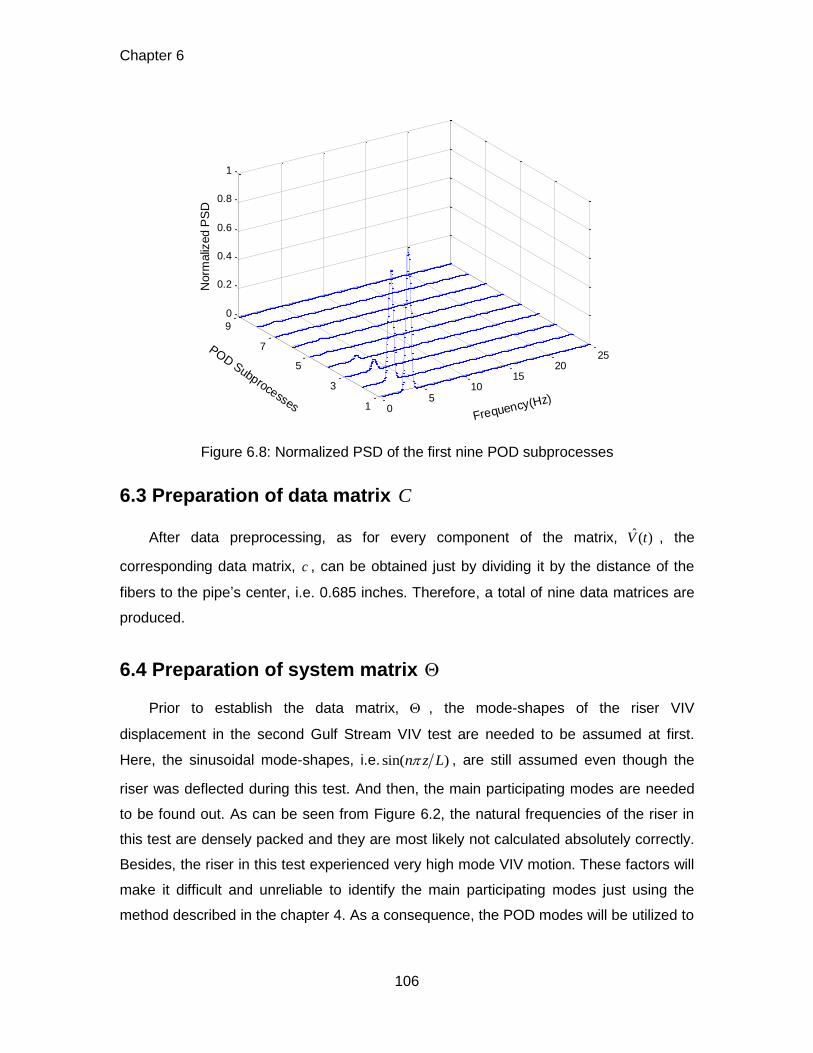
Chapter 6
106
Figure 6.8: Normalized PSD of the first nine POD subprocesses
6.3 Preparation of data matrix C
After data preprocessing, as for every component of the matrix, ˆ( )V t , the
corresponding data matrix, c , can be obtained just by dividing it by the distance of the
fibers to the pipe’s center, i.e. 0.685 inches. Therefore, a total of nine data matrices are
produced.
6.4 Preparation of system matrix
Prior to establish the data matrix, , the mode-shapes of the riser VIV
displacement in the second Gulf Stream VIV test are needed to be assumed at first.
Here, the sinusoidal mode-shapes, i.e. sin( )n z L , are still assumed even though the
riser was deflected during this test. And then, the main participating modes are needed
to be found out. As can be seen from Figure 6.2, the natural frequencies of the riser in
this test are densely packed and they are most likely not calculated absolutely correctly.
Besides, the riser in this test experienced very high mode VIV motion. These factors will
make it difficult and unreliable to identify the main participating modes just using the
method described in the chapter 4. As a consequence, the POD modes will be utilized to
05
1015
2025
1
3
5
7
9
0
0.2
0.4
0.6
0.8
1
Frequency(Hz)
POD Subprocesses
Norm
aliz
ed P
SD
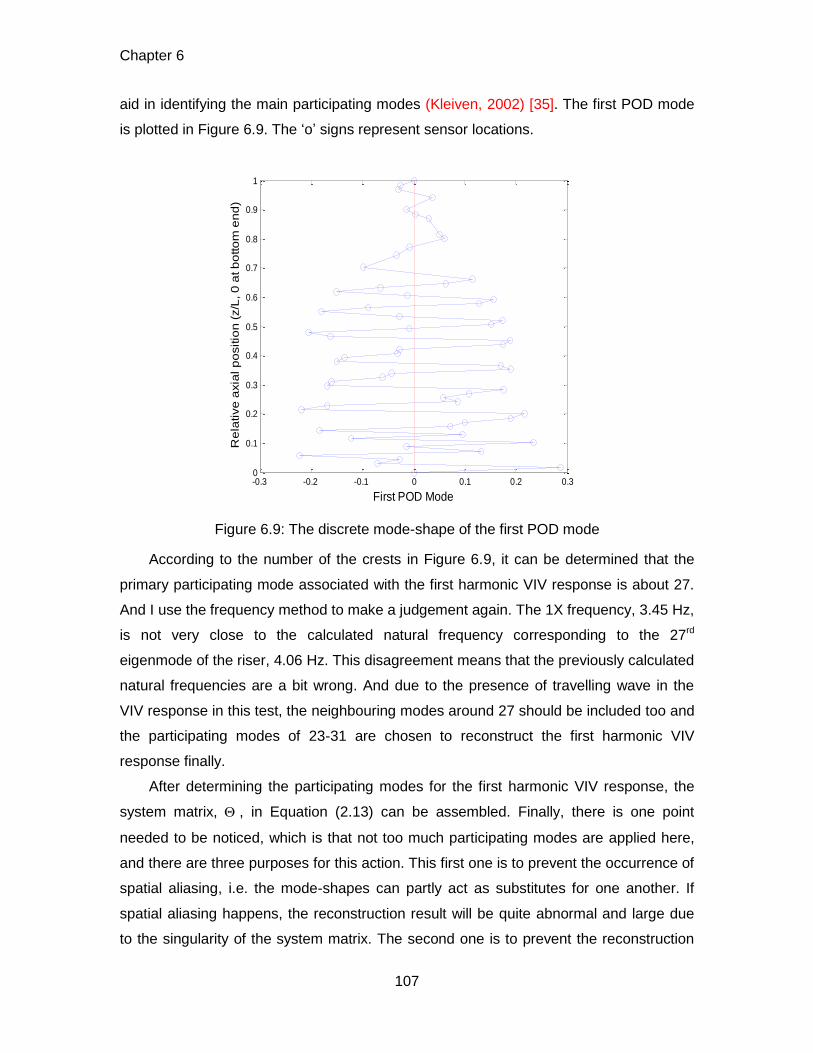
Chapter 6
107
aid in identifying the main participating modes (Kleiven, 2002) [35]. The first POD mode
is plotted in Figure 6.9. The ‘o’ signs represent sensor locations.
Figure 6.9: The discrete mode-shape of the first POD mode
According to the number of the crests in Figure 6.9, it can be determined that the
primary participating mode associated with the first harmonic VIV response is about 27.
And I use the frequency method to make a judgement again. The 1X frequency, 3.45 Hz,
is not very close to the calculated natural frequency corresponding to the 27rd
eigenmode of the riser, 4.06 Hz. This disagreement means that the previously calculated
natural frequencies are a bit wrong. And due to the presence of travelling wave in the
VIV response in this test, the neighbouring modes around 27 should be included too and
the participating modes of 23-31 are chosen to reconstruct the first harmonic VIV
response finally.
After determining the participating modes for the first harmonic VIV response, the
system matrix, , in Equation (2.13) can be assembled. Finally, there is one point
needed to be noticed, which is that not too much participating modes are applied here,
and there are three purposes for this action. This first one is to prevent the occurrence of
spatial aliasing, i.e. the mode-shapes can partly act as substitutes for one another. If
spatial aliasing happens, the reconstruction result will be quite abnormal and large due
to the singularity of the system matrix. The second one is to prevent the reconstruction
-0.3 -0.2 -0.1 0 0.1 0.2 0.30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
First POD Mode
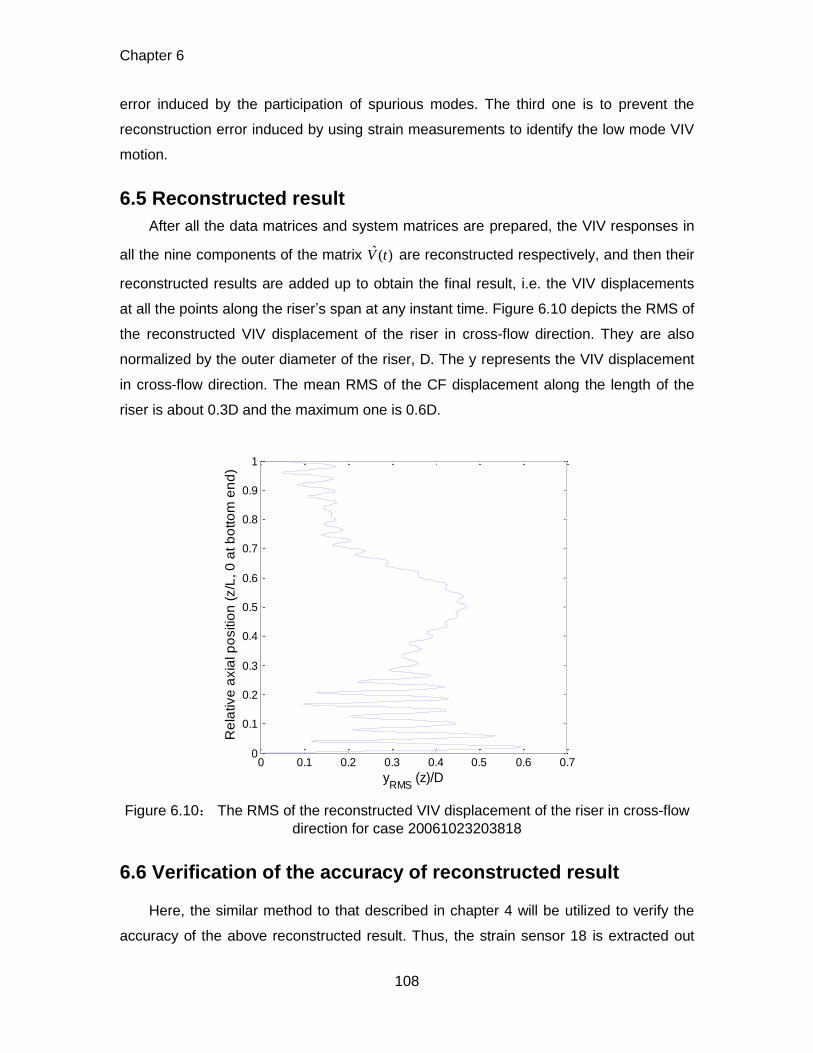
Chapter 6
108
error induced by the participation of spurious modes. The third one is to prevent the
reconstruction error induced by using strain measurements to identify the low mode VIV
motion.
6.5 Reconstructed result
After all the data matrices and system matrices are prepared, the VIV responses in
all the nine components of the matrix ˆ( )V t are reconstructed respectively, and then their
reconstructed results are added up to obtain the final result, i.e. the VIV displacements
at all the points along the riser’s span at any instant time. Figure 6.10 depicts the RMS of
the reconstructed VIV displacement of the riser in cross-flow direction. They are also
normalized by the outer diameter of the riser, D. The y represents the VIV displacement
in cross-flow direction. The mean RMS of the CF displacement along the length of the
riser is about 0.3D and the maximum one is 0.6D.
Figure 6.10: The RMS of the reconstructed VIV displacement of the riser in cross-flow
direction for case 20061023203818
6.6 Verification of the accuracy of reconstructed result
Here, the similar method to that described in chapter 4 will be utilized to verify the
accuracy of the above reconstructed result. Thus, the strain sensor 18 is extracted out
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
yRMS
(z)/D
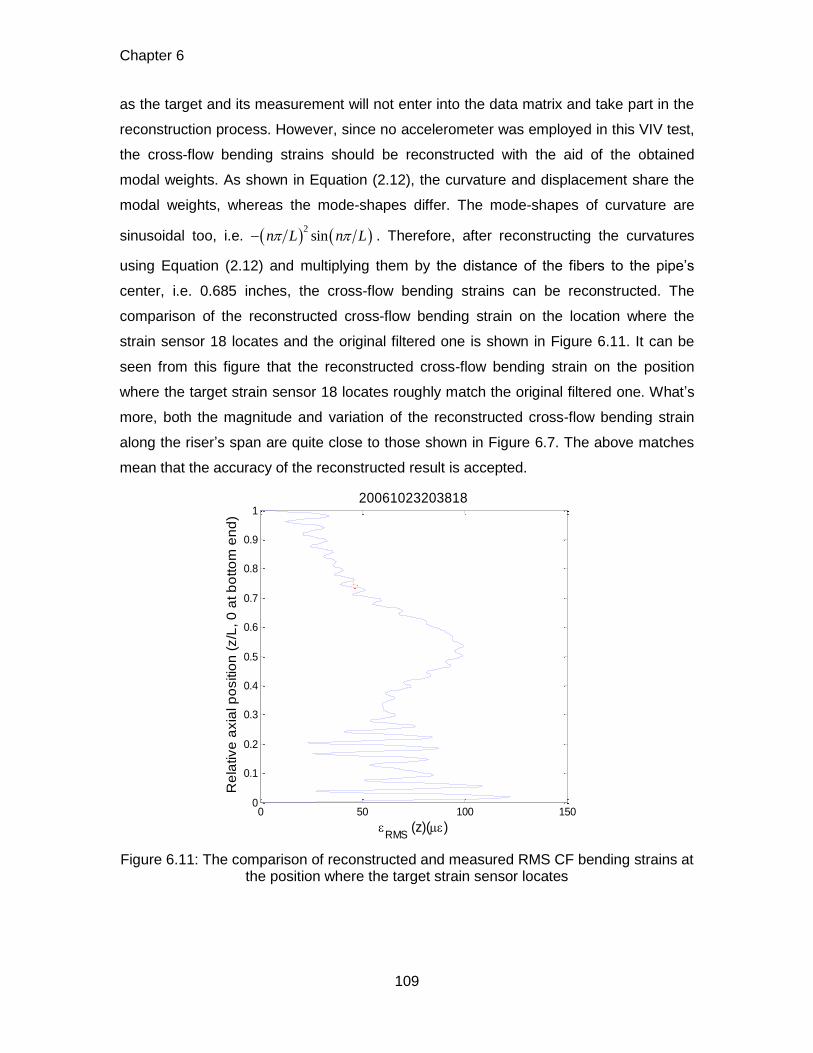
Chapter 6
109
as the target and its measurement will not enter into the data matrix and take part in the
reconstruction process. However, since no accelerometer was employed in this VIV test,
the cross-flow bending strains should be reconstructed with the aid of the obtained
modal weights. As shown in Equation (2.12), the curvature and displacement share the
modal weights, whereas the mode-shapes differ. The mode-shapes of curvature are
sinusoidal too, i.e. 2sinn L n L . Therefore, after reconstructing the curvatures
using Equation (2.12) and multiplying them by the distance of the fibers to the pipe’s
center, i.e. 0.685 inches, the cross-flow bending strains can be reconstructed. The
comparison of the reconstructed cross-flow bending strain on the location where the
strain sensor 18 locates and the original filtered one is shown in Figure 6.11. It can be
seen from this figure that the reconstructed cross-flow bending strain on the position
where the target strain sensor 18 locates roughly match the original filtered one. What’s
more, both the magnitude and variation of the reconstructed cross-flow bending strain
along the riser’s span are quite close to those shown in Figure 6.7. The above matches
mean that the accuracy of the reconstructed result is accepted.
Figure 6.11: The comparison of reconstructed and measured RMS CF bending strains at the position where the target strain sensor locates
0 50 100 1500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
RMS
(z)()
20061023203818
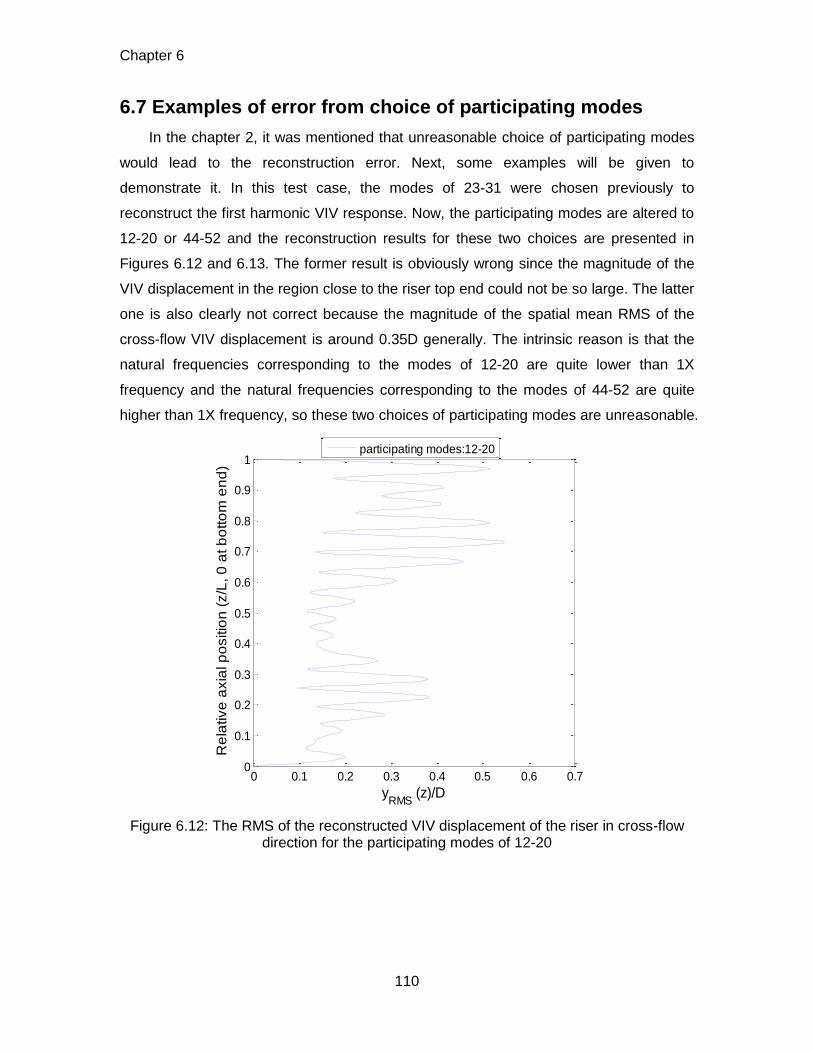
Chapter 6
110
6.7 Examples of error from choice of participating modes
In the chapter 2, it was mentioned that unreasonable choice of participating modes
would lead to the reconstruction error. Next, some examples will be given to
demonstrate it. In this test case, the modes of 23-31 were chosen previously to
reconstruct the first harmonic VIV response. Now, the participating modes are altered to
12-20 or 44-52 and the reconstruction results for these two choices are presented in
Figures 6.12 and 6.13. The former result is obviously wrong since the magnitude of the
VIV displacement in the region close to the riser top end could not be so large. The latter
one is also clearly not correct because the magnitude of the spatial mean RMS of the
cross-flow VIV displacement is around 0.35D generally. The intrinsic reason is that the
natural frequencies corresponding to the modes of 12-20 are quite lower than 1X
frequency and the natural frequencies corresponding to the modes of 44-52 are quite
higher than 1X frequency, so these two choices of participating modes are unreasonable.
Figure 6.12: The RMS of the reconstructed VIV displacement of the riser in cross-flow direction for the participating modes of 12-20
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
yRMS
(z)/D
participating modes:12-20
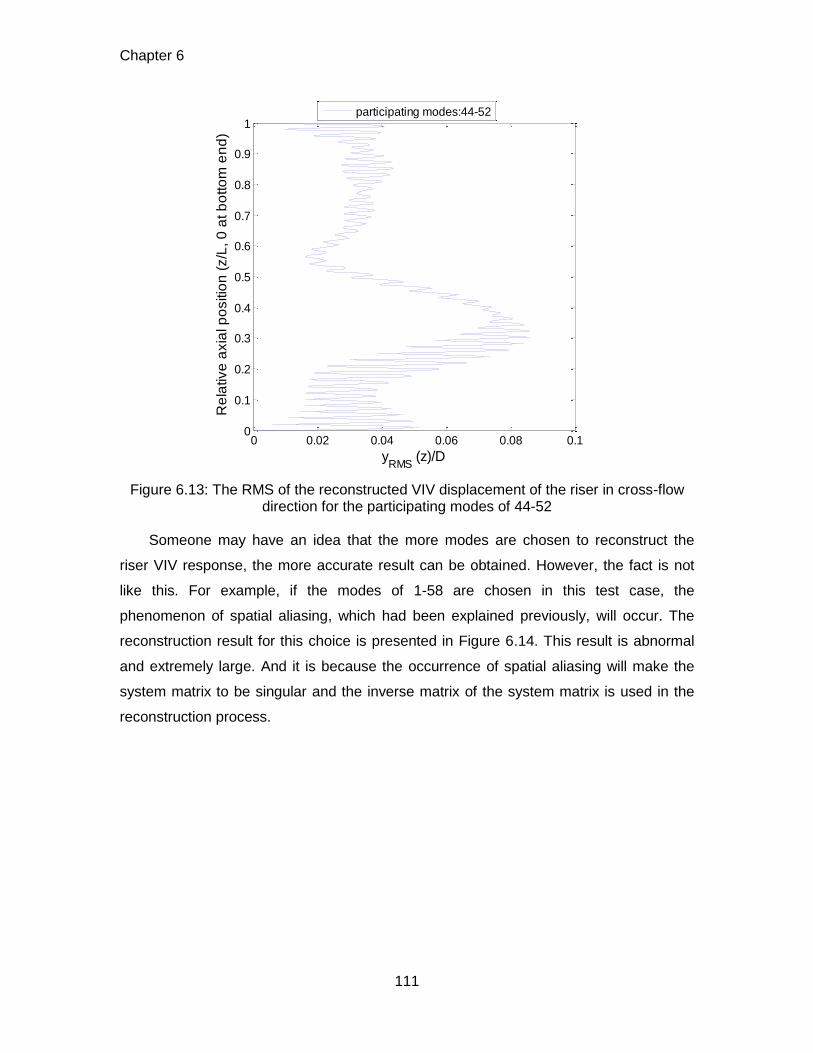
Chapter 6
111
Figure 6.13: The RMS of the reconstructed VIV displacement of the riser in cross-flow direction for the participating modes of 44-52
Someone may have an idea that the more modes are chosen to reconstruct the
riser VIV response, the more accurate result can be obtained. However, the fact is not
like this. For example, if the modes of 1-58 are chosen in this test case, the
phenomenon of spatial aliasing, which had been explained previously, will occur. The
reconstruction result for this choice is presented in Figure 6.14. This result is abnormal
and extremely large. And it is because the occurrence of spatial aliasing will make the
system matrix to be singular and the inverse matrix of the system matrix is used in the
reconstruction process.
0 0.02 0.04 0.06 0.08 0.10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lative
axia
l p
ositio
n (
z/L
, 0
at b
otto
m e
nd
)
yRMS
(z)/D
participating modes:44-52
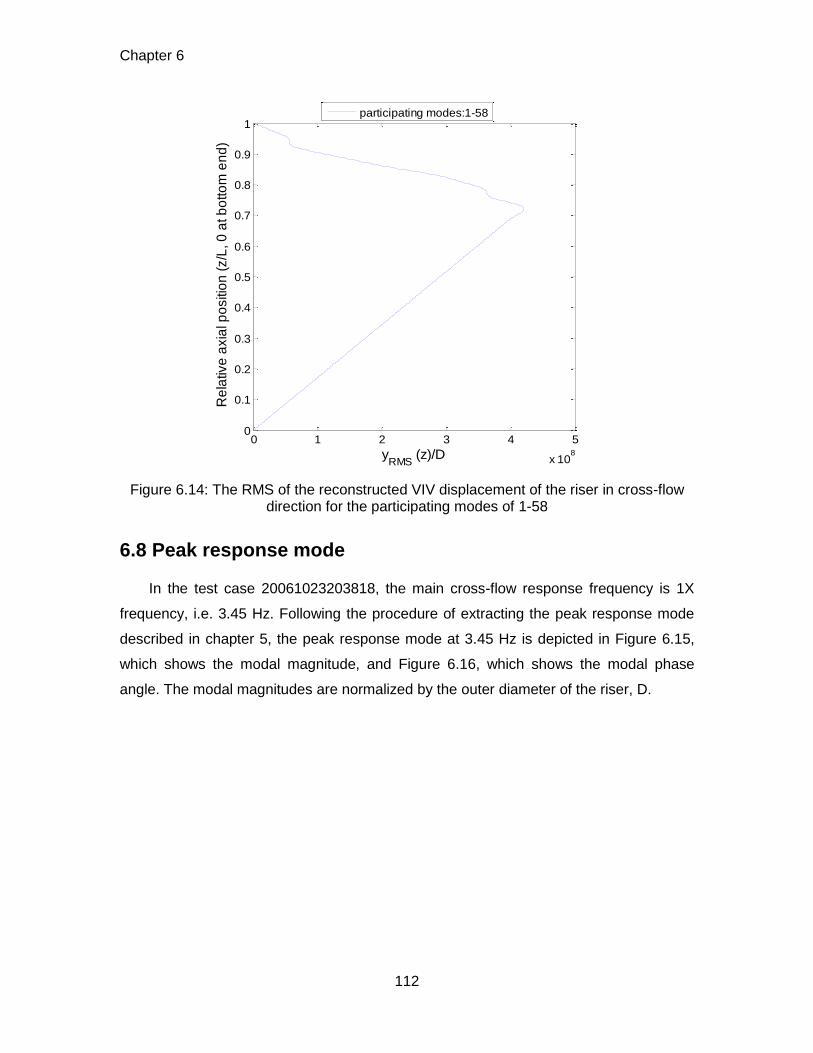
Chapter 6
112
Figure 6.14: The RMS of the reconstructed VIV displacement of the riser in cross-flow direction for the participating modes of 1-58
6.8 Peak response mode
In the test case 20061023203818, the main cross-flow response frequency is 1X
frequency, i.e. 3.45 Hz. Following the procedure of extracting the peak response mode
described in chapter 5, the peak response mode at 3.45 Hz is depicted in Figure 6.15,
which shows the modal magnitude, and Figure 6.16, which shows the modal phase
angle. The modal magnitudes are normalized by the outer diameter of the riser, D.
0 1 2 3 4 5
x 108
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Re
lativ
e a
xia
l po
siti
on
(z/L
, 0
at b
otto
m e
nd
)
yRMS
(z)/D
participating modes:1-58
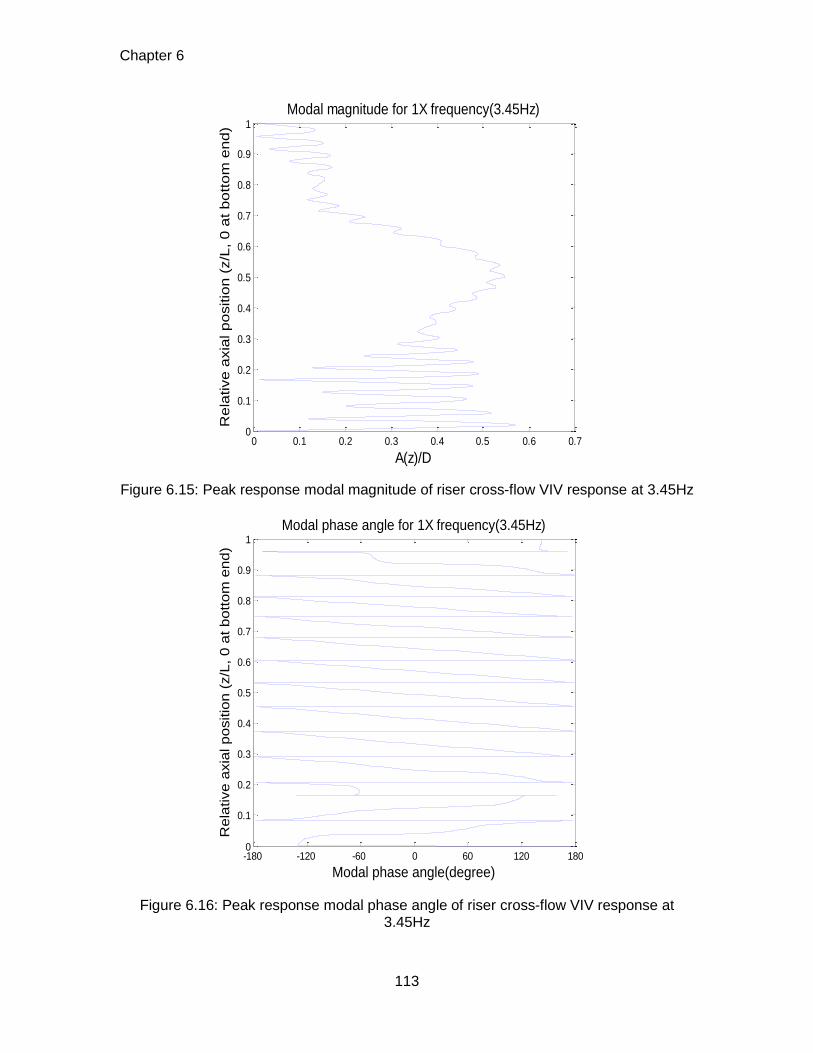
Chapter 6
113
Figure 6.15: Peak response modal magnitude of riser cross-flow VIV response at 3.45Hz
Figure 6.16: Peak response modal phase angle of riser cross-flow VIV response at 3.45Hz
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Rela
tive a
xia
l positio
n (
z/L
, 0 a
t bottom
end)
A(z)/D
Modal magnitude for 1X frequency(3.45Hz)
-180 -120 -60 0 60 120 1800
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Rela
tive a
xia
l positio
n (
z/L
, 0 a
t bottom
end)
Modal phase angle(degree)
Modal phase angle for 1X frequency(3.45Hz)
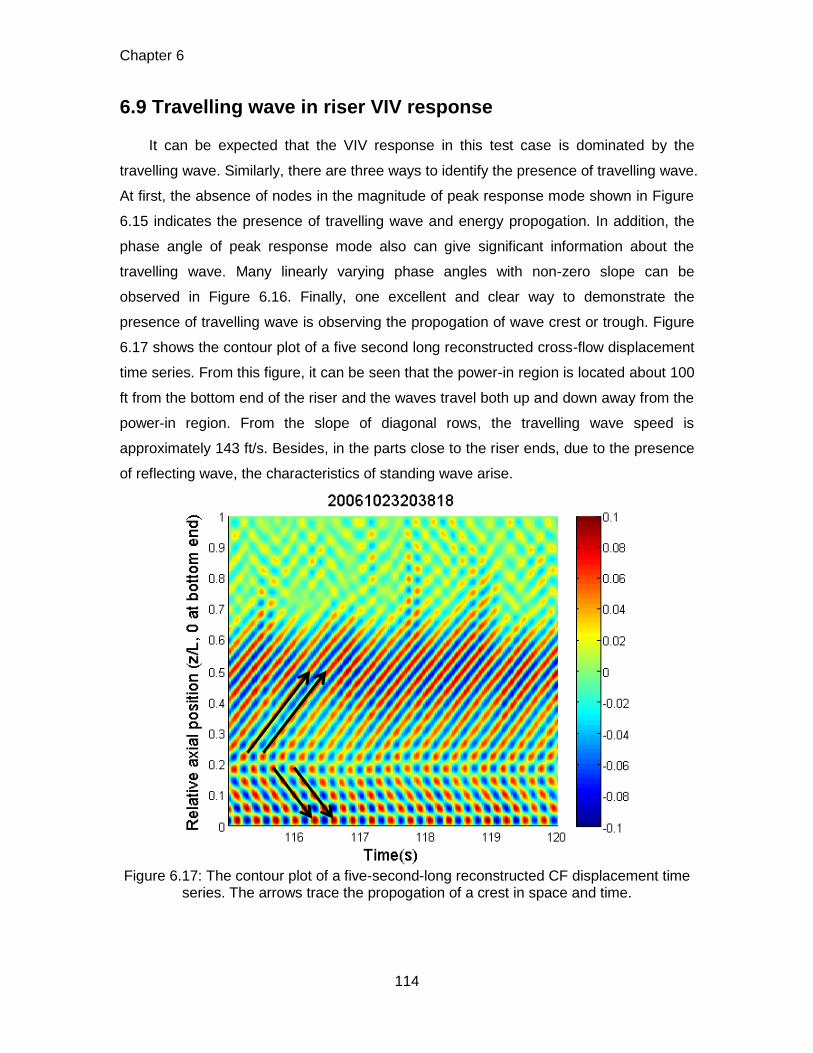
Chapter 6
114
6.9 Travelling wave in riser VIV response
It can be expected that the VIV response in this test case is dominated by the
travelling wave. Similarly, there are three ways to identify the presence of travelling wave.
At first, the absence of nodes in the magnitude of peak response mode shown in Figure
6.15 indicates the presence of travelling wave and energy propogation. In addition, the
phase angle of peak response mode also can give significant information about the
travelling wave. Many linearly varying phase angles with non-zero slope can be
observed in Figure 6.16. Finally, one excellent and clear way to demonstrate the
presence of travelling wave is observing the propogation of wave crest or trough. Figure
6.17 shows the contour plot of a five second long reconstructed cross-flow displacement
time series. From this figure, it can be seen that the power-in region is located about 100
ft from the bottom end of the riser and the waves travel both up and down away from the
power-in region. From the slope of diagonal rows, the travelling wave speed is
approximately 143 ft/s. Besides, in the parts close to the riser ends, due to the presence
of reflecting wave, the characteristics of standing wave arise.
Figure 6.17: The contour plot of a five-second-long reconstructed CF displacement time
series. The arrows trace the propogation of a crest in space and time.
Chapter 6
115
Chapter 7
116
Chapter 7
7 Conclusions
7.1 Summary of contributions from each chapter
The work presented in this thesis can be subdivided into four major parts. In the first
part of the thesis, the modal approach is chosen to do riser VIV response reconstruction.
In the second part of the thesis, the descriptions of ExxonMobil experimental and the
second Gulf Stream field VIV tests are done. In the third part of the thesis, the riser VIV
responses in these two tests are reconstructed using the modal approach. In the final
part of the theis, some analyses with regard to the riser VIV responses in tests are done
based on the reconstructed results.
7.1.1 Riser VIV response reconstruction method
In the chapter 2 of this thesis, the algorithms using the modal approach to
reconstruct the response of a riser from experimental data are developed. The specific
contributions of this chapter are as follows:
Theoretical basis and limitations of modal approach: The modal approach is
based on the theory of Modal Analysis. There are three limitations of the modal
approach. The first one is that the modal approach is a linear method, whereas the VIV
is a nonlinear problem. The second one is that the true mode-shapes of the riser’s VIV
displacement are not constant and very hard to find out. The sinusoidal mode-shape is
just an approximation. The final one is that the chosen participating modes can not be
perfectly correct.
Classification of modal approach: The modal approach can be classified into the
frequency domain method and time domain method. Choosing which method depends
on the types of provided measurements.
Chapter 7
117
Development of a systematic algorithm for riser VIV response reconstruction:
Two algorithms using the frequency domain method and time domain method
respectively are developed.
Response reconstruction error analysis: Two sources of error during response
reconstruction are identified. One is using strain measurement to identify the low modes
riser VIV motion. Another is unreasonable choice of participating modes.
7.1.2 Description of two objective VIV tests
In the chapter 3 of this thesis, the ExxonMobil experimental VIV test and the second
Gulf Stream field VIV test are described in detail. The description is focused on three
parts, i.e. experiment set-up, properties of riser model, and measurement system.
7.1.3 Response reconstruction using experimental data
In the chapter 4 of this thesis, the riser VIV responses in ExxonMobil experimental
VIV test are reconstructed from strain and acceleration signals using the frequency
domain method. In the chapter 6 of this thesis, one riser VIV response in the second
Gulf Stream field VIV test is reconstructed from only the strain signals using the time
domain method. The specific contributions of these two chapters are as follows:
Preparation of data matrix: In this section, the choice of time window is quite
important. In the chapter 4, the latter part of the period with almost constant current
velocity, i.e. the period during which the VIV behaviour is fully developed, is chosen. In
the chapter 6, the scalogram (time-frequency representation) is used to extract a
statistically region of a signal. In addition, in order to clear the harmful and unnecessary
frequency components of the data, it is band pass filtered using the butterworth digital
filter. Finally, in the chapter 6, due to the complex and nonuniform VIV response along
the length of the riser in field VIV test, the approach of Proper Orthogonal Decomposition
(POD) is used to decompose the experimental data and to extract the energetic and
regular components.
Preparation of system matrix: In this section, the most important part is the
choice of participating modes, which is based on the assumption that if one response
frequency falls between two natural frequencies, the two modes corresponding to these
two natural frequencies and their neighbouring modes will be excited. In the chapter 4,
the choice of participating modes is based on the simply calculated natural frequencies
of the riser in still water and spectral analysis of the experimental data. In the chapter 6,
Chapter 7
118
it is done with the help of POD mode. What’s more, in the chapter 4, for the sake of
avoiding the reconstruction error result from using the strain measurement to identify the
low modes VIV motion, the system matrix is modified.
Verification of the accuracy of the reconstructed result: In this section, one
sensor is picked out as the target and its measurement will not enter into the data matrix
and take part in the reconstruction process. And then the reconstructed signal at the
position where this target senor locates will be compared with the original signal to check
the accuracy of the reconstructed result.
Examples for reconstruction error analysis: In chapter 4, two examples are
given to demonstrate the reconstruction errors induced by using strain measurement to
identify the low modes riser VIV motion and unreasonable choice of participating modes.
7.1.4 Analyses to the reconstructed VIV response
In the chapter 4 and in the final part of the chapter 6, some analyses are done with
the reconstructed VIV response. The specific contributions are as follows:
Extract riser VIV peak response mode: In order to eliminate the misunderstanding
about the free vibration mode of the tested riser and the peak response mode, the latter
is extracted.
Travelling wave identification methods: Three methods for identifying travelling
waves in riser VIV responses are listed. These methods use 1) magnitude of peak
response mode, 2) phase angle of peak response mode, and 3) the propogation of wave
crest or trough to identify the presence of travelling wave. The last one also can help us
to identify the power-in region on the riser and travelling wave speed along the riser.
Key parameters analyses: In the final part of chapter 5, some key parameters,
such as the spatial mean RMS displacement over the length of the riser, dominant
frequency and dominant mode with respect to displacement, are extracted from the
reconstructed VIV response. The effects of external conditions, e.g. current speed,
current profile and strake distribution, on these parameters are presented. In addition,
the differences between the VIV responses in cross-flow and in-line directions are
presented.
Chapter 7
119
7.2 Recommendations for future research
Although the riser VIV response can be reconstructed using the modal approach
and some analyses are done about VIV characteristics, there are some
recommendations with regard to the future research of this subject.
Improvement of the modal approach or new reconstruction approach: As
mentioned in the chapter 2 of this thesis, the modal approach has some limitations. The
sinusoidal mode-shapes used in this thesis are just approximations. Thus, a finite
element model can be built to find the more closed mode-shapes of the tested riser and
its natural frequencies. Alternatively, the method of superposing the peak response
modes, which can be obtained by means of prediction programs like VIVA, to
reconstruct riser VIV response.
Verification of the accuracy of the reconstructed result: If the benchmark data
are given, the verification of the accuracy of the reconstructed result will be more reliable.
Besides, the choice of participating modes will become more accurate and so the
response reconstruction error analysis will become more precise.
Analysis to the riser VIV response: Some important coefficients, such as the lift
force coefficient and drag force coefficient can be extracted base on the reconstructed
VIV response. And the VIV fatigue life along the length of the riser can be calculated
from the reconstructed bending strains. These results will provide benchmark
information for the VIV prediction program.
Bibliography
120
Bibliography
[1] Blevins, R.D., 1990. Flow-Induced Vibration, second edition. Van Nostrand Reinhold, New York.
[2] H.Blackburn and R.Henderson. Lock-in behaviour in simulated vortex-induced vibration. Experimental Thermal and Fluid Science, Volume 12, Issue 2, February 1996, Pages 184-189.
[3] M.R.Gharib. Vortex-Induced Vibration, Absence of Lock-in and Fluid Force Deduction. Phd Thesis, California Institute of Technology, Source DAI-B 62/04, p.1922, Oct 2001,182 pages,1999.
[4] Sarpkaya, T., 1978, Fluid forces on oscillating cylinders. Journal of The Waterway, Port, Costal and Ocean Division 104, 275-290.
[5] Gopalkrishman, R., 1993, Vortex-induced Forces on Oscillating Bluff Cylinders, Ph.D. Thesis, MIT, Cambridge, MA,USA.
[6] Lie, H., Larsen, C.M., Vandiver, J.K., 1997. Vortex induced vibrations of long marine riser; model test in a rotating rig. 16th International Conference on Offshore Mechanics and Arctic Engineering, Yokohama, Japan.
[7] Lienhard, I.H, 1996. Synopsis of lift, drag and vortex frequency data for rigid circular cylinders. Washington State University, college of Engineering, Research Division Bulletin 300.
[8] T.Sarkaya. A Critical Review of the Intrinsic Nature of Vortex-Induced Vibrations. Journal of Fluids and Structures, 19:389-447,2004.
[9] W.R. Frank, M.A. Tognarelli, S.T. Slocum, R.B. Campbell, and S. Balasubramanian. Flow-Induced Vibration of a Long, Flexible, Straked Cylinder in Uniform and Linearly Sheared Currents. In Proceedings of the Offshore Technology Conference, Paper no. 16340, Houston, USA, 2004.
[10] H.Braaten and H.Lie. NDP Riser High Mode VIV Tests. Main Report No. 512394.00.01. Norwegian Marine Technology Research Institute, 2004.
[11] E.Huse, G.Kleiven, and F.G. Nielsen. Large Scale Model Testing of Deep Sea Risers. In Proceedings of the Offshore Technology Conference, Paper no. 8701, Houston, USA, 1998.
[12] J.K. Vandiver, H. Marcollo, S. Fantone, V. Jaiswal, V. Jhingran, and S. Swithenbank. DeepStar 7402Miami 2004 riser report. Deepstar-7402-Miami testing, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005.
Bibliography
121
[13] J.K. Vandiver, S.Swithenbank, V,Jaiswal, and V.Jhingran. Fatigue damage from high mode number vortex-induced vibration. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Hamburg, Germany, June 2006.
[14] J.K. Vandiver and L.Lee. SHEAR7 V4.4 Program Theoretical Manual. Massachusetts Institute of Technology, Cambridge, MA, 2005
[15] Triantafyllou, M.S, Triantafyllou, G.S., Tein, D., Ambrose, B.D., 1999. Pragmatic riser VIV analysis. In: Proceedings from the Offshore Technology Conference, OTC 10931, Houston, USA.
[16] MARINTEK, 2001, VIVANA-Theory Manual. MARINTEK Report MTF00-023, MARINTEK, Trondheim, Norway.
[17] Moe, G., Arntsen, Ø.A., Hoen, C., 2001. VIV analysis of risers by complex modes. In: Proceedings from the International Symposium on Offshore and Polar Engineering, IL-38.
[18] Etienne, S., Biolley, F., Fontaine, E., Le Cunff, C., Heurtier,J.M., 2001. Numerical simulations of vortex-induced vibrations of slender flexible offshore structures. In: Proceedings of the 11th International Offshore and Polar Engineering Conference, Stavanger, Norway, pp. 419-425.
[19] Willden, R.H.J., Graham, J.M.R., 2001. Numerical prediction of VIV on long flexible circular cylinders. Journal of Fluids and Structures 15, 659-669.
[20] Kaasen, K.E., Lie, H., Solaas, F., Vandiver, J.K., 2000. Norwegian Deepwater Programme: Analysis of vortex-induced vibrations of marine risers based on full-scale measurements. OTC 11997, Offshore Technology Conference, Houston, Texas, USA.
[21] Trim, A.D., Braaten, H., Lie, H., Tognarelli, M.A., 2005. Experimental investigation of vortex-induced vibration of long marine risers. Journal of Fluids and Structures 21, 335-361.
[22] Lie, H., Kaasen, K.E., 2006. Modal analysis of measurements from a large-scale VIV model test of a riser in linearly sheared flow. Journal of Fluids and Structures 22, 557-575..
[23] J.M.J. Spijkers, A.W.C.M. Vrouwenvelder, E.C. Klaver, 2005. Structural Dynamics. Delft University of Technology, Pages 35-38.
[24] Vortex-Induced Vibration Data Repository (VIVDR). Site hosted by Center for Ocean Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, 2007, http://web.mit.edu/towtank/www/vivdr/datasets.html.
[25] M.A.Tognarelli and H.Lie. VIV Suppression Tests on High L/D Flexible Cylinders. Main Report No. 512382.00.01. Norwegian Marine Technology Research Institute, 2003.
[26] Vandiver J.K., Swithenbank S.B., Jaiswal V. and Jhingran V., 2007. DeepStar 8402: Gulf Stream Experiment October 2006, Document No.DSVIII CTR 8402, Massachusetts Institute of Technology.
[27] Tognarelli, M.A., Slocum, S.T., Frank, W.R., Campbell, R.B. 2004. VIV response of a long flexible cylinder in uniform and linearly sheared currents, OTC 16338, Offshore Technology Conference, Houston, Texas, USA.
Bibliography
122
[28] Lie, H., Larsen, C.M., Vandiver, J.K., 1997. Vortex induced vibrations of long marine risers; model test in a ratating rig. OMAE Conference, Vol. 1-B, Yokohama,Japan, pp.241-252.
[29] Larsen, C.M., Koushan, K., 2005. Empirical model for the analysis of vortex induced vibrations of free spanning pipelines. EURODYN Conference, Paris, France.
[30] Marcollo, H., Chaurasia, H. and Vandiver, J.K., Phenomenon Observed in VIV Bare Riser Field Tests, Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering, 2007, OMAE2007-29562.
[31] A. Grossmann, J. Morlet. Decomposition of hardy functions into square integrable wavelets of constant shape. SIAM.J.MATH.ANAL, Vol.15, No.4, July 1984.
[32] Mukundan H., 2008. Vortex-induced vibration of marine risers: motion and force reconstruction from field and experimental data. Ph. D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA.
[33] Srivilairit, T., Manuel, L., and Saranyasoontorn, K., 2006. On the use of empirical orthogonal decomposition of field data to study deepwater current profiles for risers. In Proceedings of the 16th International Offshore and Polar Engineering Conference (ISOPE-2006), San Francisco, California, May 2006.
[34] Shi, C., and Manuel, L., 2016. An empirical procedure for fatigue damage estimation in instrumented risers. In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2016-54623), Busan, Korea, June 2016.
[35] Kleiven, G., 2002. Identifying VIV vibration modes by use of the empirical orthogonal functions technique. In Proceedings of 21st International Conference on Offshore Mechanics and Arctic Engineering (OMAE2002), Oslo, Norway, June 2002.

Bibliography
123
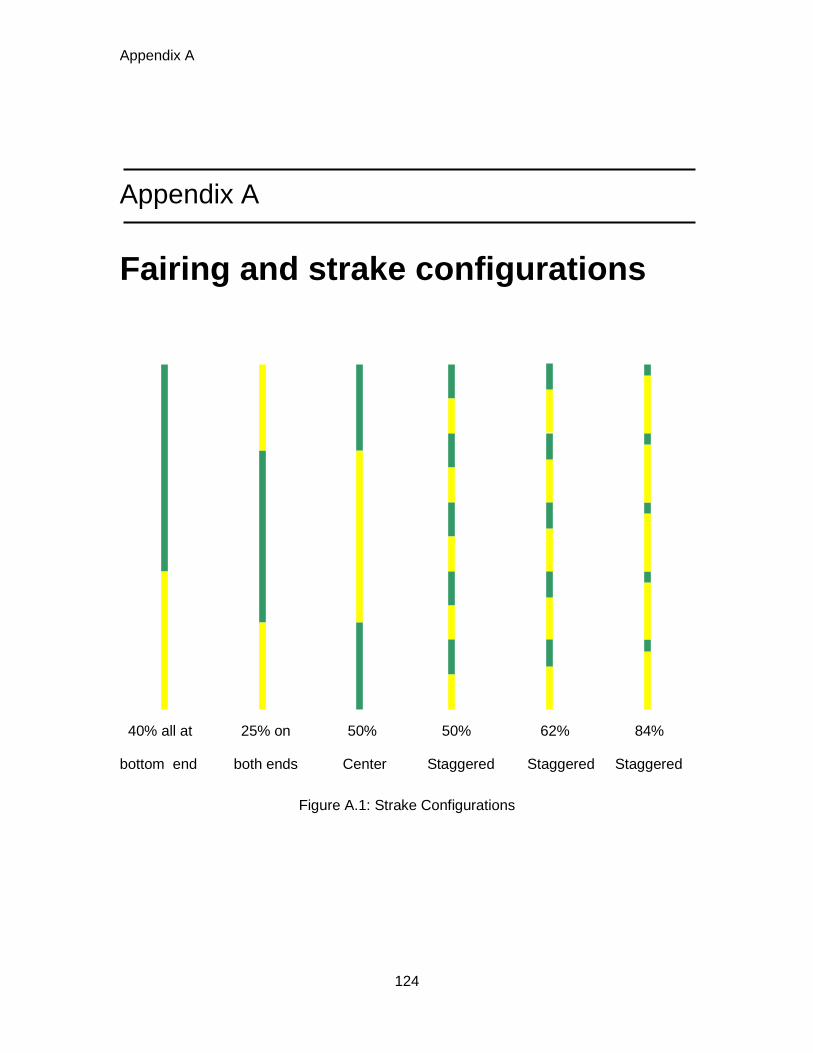
Appendix A
124
Appendix A
Fairing and strake configurations
40% all at 25% on 50% 50% 62% 84%
bottom end both ends Center Staggered Staggered Staggered
Figure A.1: Strake Configurations
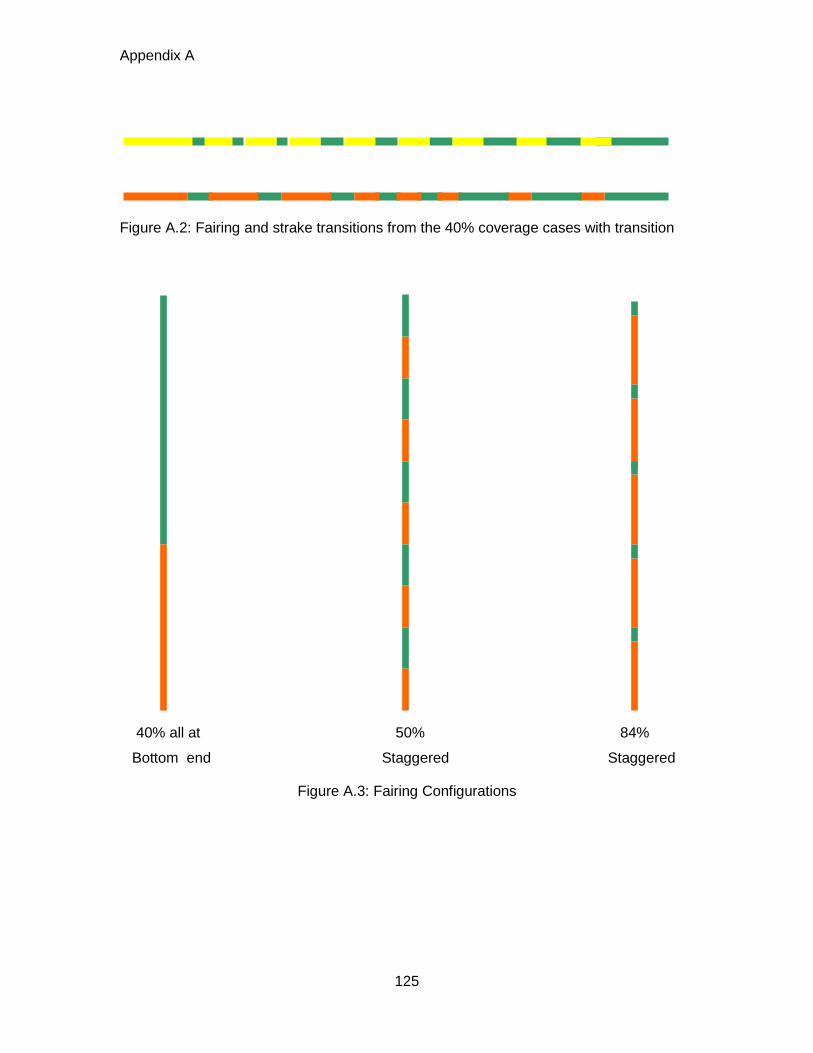
Appendix A
125
Figure A.2: Fairing and strake transitions from the 40% coverage cases with transition
40% all at 50% 84%
Bottom end Staggered Staggered
Figure A.3: Fairing Configurations
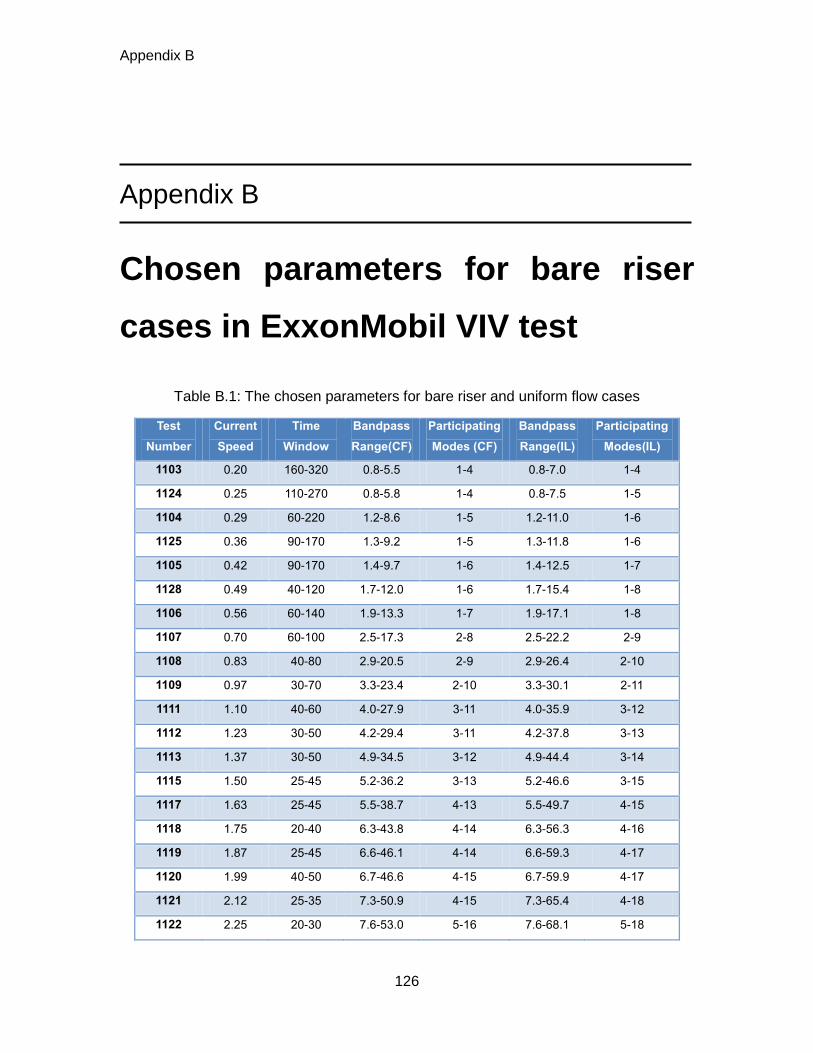
Appendix B
126
Appendix B
Chosen parameters for bare riser
cases in ExxonMobil VIV test
Table B.1: The chosen parameters for bare riser and uniform flow cases
Test
Number
Current
Speed
Time
Window
Bandpass
Range(CF)
Participating
Modes (CF)
Bandpass
Range(IL)
Participating
Modes(IL)
1103 0.20 160-320 0.8-5.5 1-4 0.8-7.0 1-4
1124 0.25 110-270 0.8-5.8 1-4 0.8-7.5 1-5
1104 0.29 60-220 1.2-8.6 1-5 1.2-11.0 1-6
1125 0.36 90-170 1.3-9.2 1-5 1.3-11.8 1-6
1105 0.42 90-170 1.4-9.7 1-6 1.4-12.5 1-7
1128 0.49 40-120 1.7-12.0 1-6 1.7-15.4 1-8
1106 0.56 60-140 1.9-13.3 1-7 1.9-17.1 1-8
1107 0.70 60-100 2.5-17.3 2-8 2.5-22.2 2-9
1108 0.83 40-80 2.9-20.5 2-9 2.9-26.4 2-10
1109 0.97 30-70 3.3-23.4 2-10 3.3-30.1 2-11
1111 1.10 40-60 4.0-27.9 3-11 4.0-35.9 3-12
1112 1.23 30-50 4.2-29.4 3-11 4.2-37.8 3-13
1113 1.37 30-50 4.9-34.5 3-12 4.9-44.4 3-14
1115 1.50 25-45 5.2-36.2 3-13 5.2-46.6 3-15
1117 1.63 25-45 5.5-38.7 4-13 5.5-49.7 4-15
1118 1.75 20-40 6.3-43.8 4-14 6.3-56.3 4-16
1119 1.87 25-45 6.6-46.1 4-14 6.6-59.3 4-17
1120 1.99 40-50 6.7-46.6 4-15 6.7-59.9 4-17
1121 2.12 25-35 7.3-50.9 4-15 7.3-65.4 4-18
1122 2.25 20-30 7.6-53.0 5-16 7.6-68.1 5-18
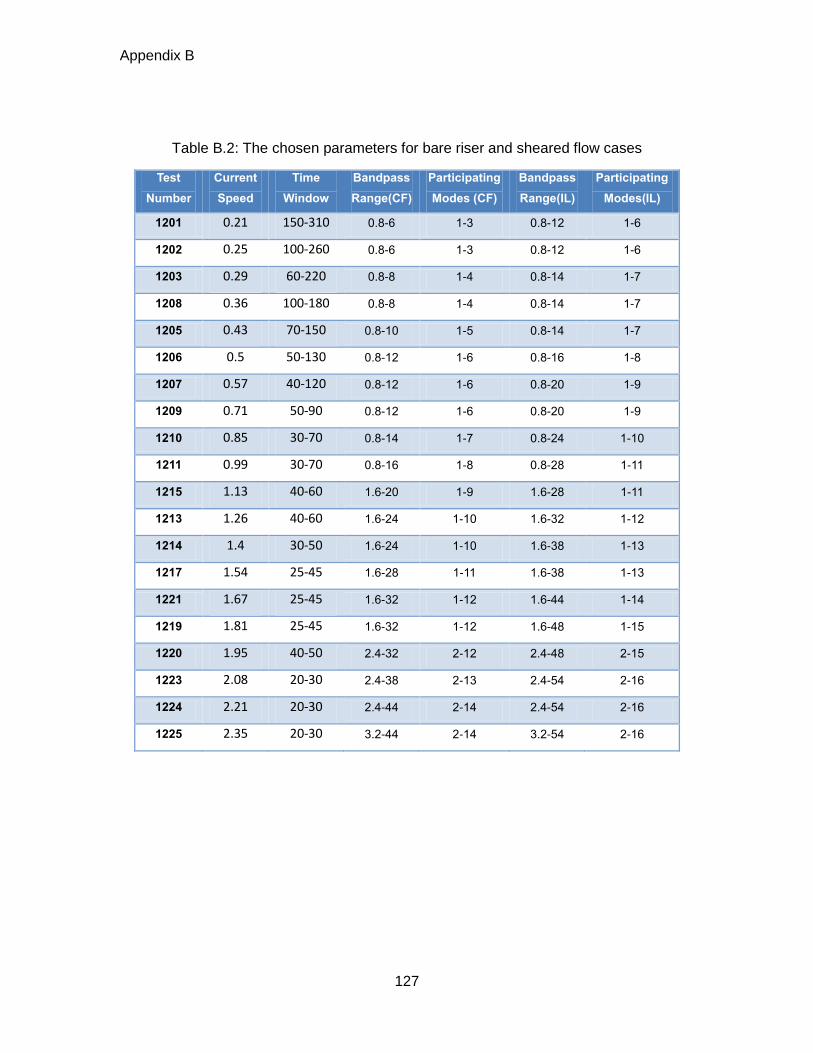
Appendix B
127
Table B.2: The chosen parameters for bare riser and sheared flow cases
Test
Number
Current
Speed
Time
Window
Bandpass
Range(CF)
Participating
Modes (CF)
Bandpass
Range(IL)
Participating
Modes(IL)
1201 0.21 150-310 0.8-6 1-3 0.8-12 1-6
1202 0.25 100-260 0.8-6 1-3 0.8-12 1-6
1203 0.29 60-220 0.8-8 1-4 0.8-14 1-7
1208 0.36 100-180 0.8-8 1-4 0.8-14 1-7
1205 0.43 70-150 0.8-10 1-5 0.8-14 1-7
1206 0.5 50-130 0.8-12 1-6 0.8-16 1-8
1207 0.57 40-120 0.8-12 1-6 0.8-20 1-9
1209 0.71 50-90 0.8-12 1-6 0.8-20 1-9
1210 0.85 30-70 0.8-14 1-7 0.8-24 1-10
1211 0.99 30-70 0.8-16 1-8 0.8-28 1-11
1215 1.13 40-60 1.6-20 1-9 1.6-28 1-11
1213 1.26 40-60 1.6-24 1-10 1.6-32 1-12
1214 1.4 30-50 1.6-24 1-10 1.6-38 1-13
1217 1.54 25-45 1.6-28 1-11 1.6-38 1-13
1221 1.67 25-45 1.6-32 1-12 1.6-44 1-14
1219 1.81 25-45 1.6-32 1-12 1.6-48 1-15
1220 1.95 40-50 2.4-32 2-12 2.4-48 2-15
1223 2.08 20-30 2.4-38 2-13 2.4-54 2-16
1224 2.21 20-30 2.4-44 2-14 2.4-54 2-16
1225 2.35 20-30 3.2-44 2-14 3.2-54 2-16
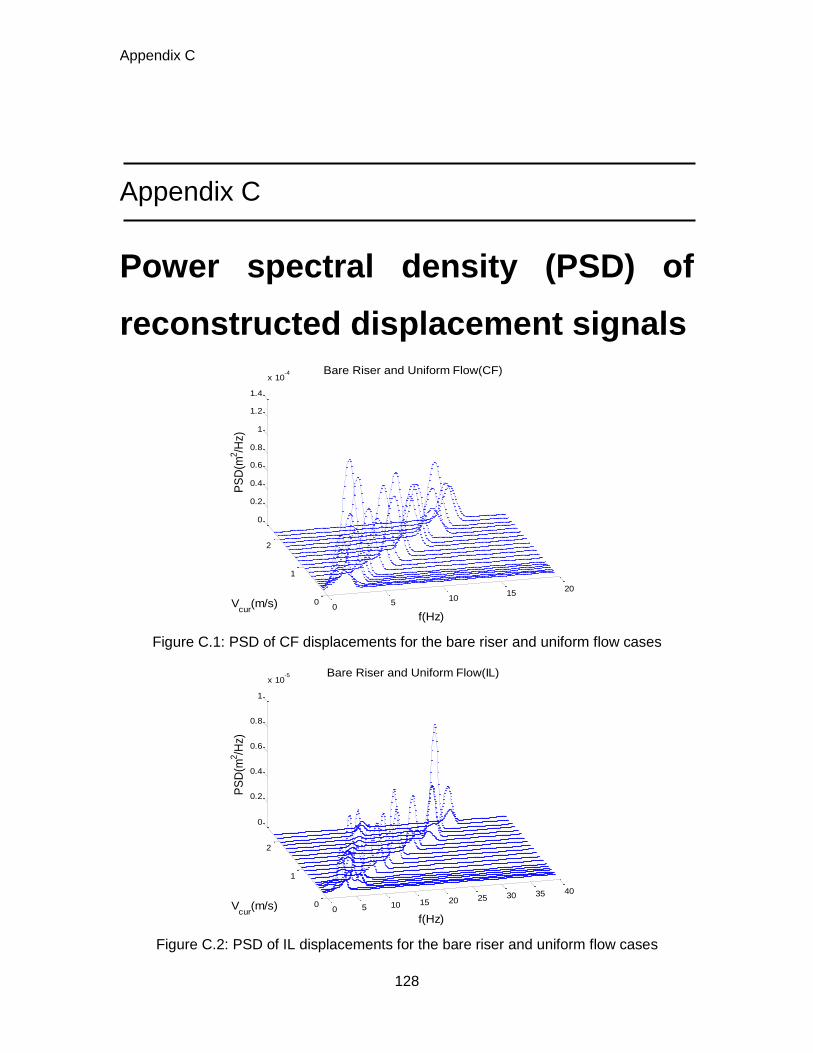
Appendix C
128
Appendix C
Power spectral density (PSD) of
reconstructed displacement signals
Figure C.1: PSD of CF displacements for the bare riser and uniform flow cases
Figure C.2: PSD of IL displacements for the bare riser and uniform flow cases
05
1015
20
0
1
2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
x 10-4
f(Hz)
Bare Riser and Uniform Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
0 5 10 15 20 25 30 35 40
0
1
2
0
0.2
0.4
0.6
0.8
1
x 10-5
f(Hz)
Bare Riser and Uniform Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)
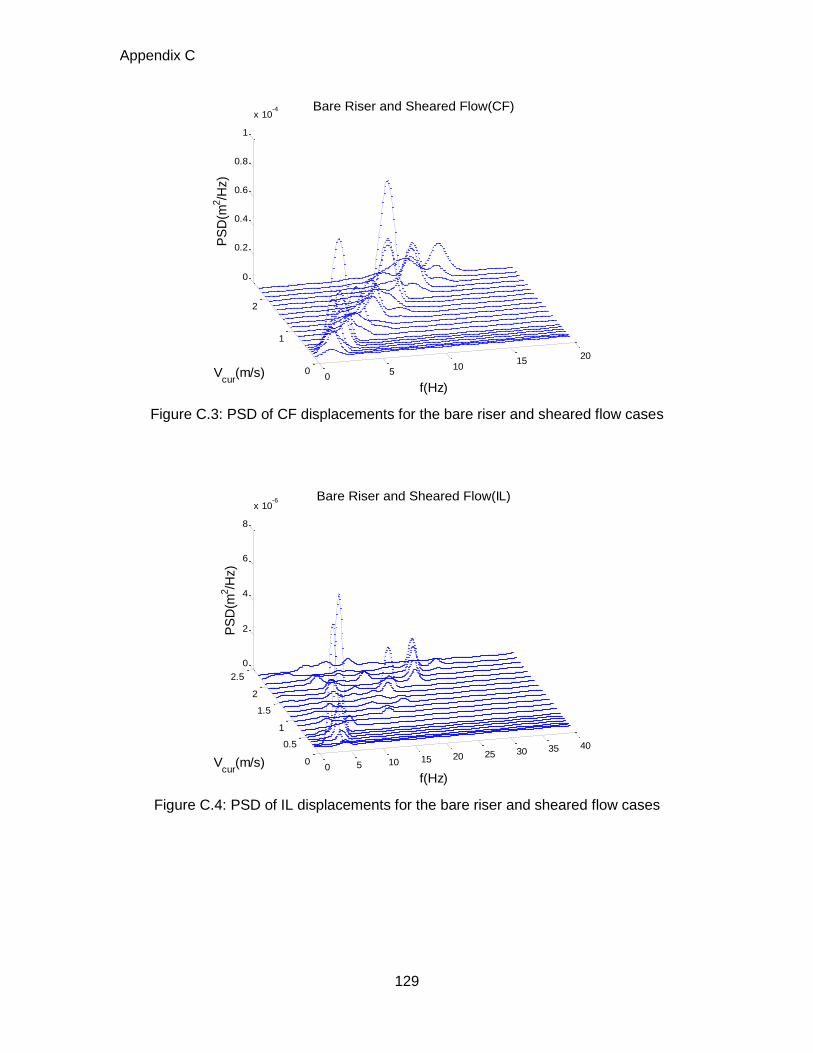
Appendix C
129
Figure C.3: PSD of CF displacements for the bare riser and sheared flow cases
Figure C.4: PSD of IL displacements for the bare riser and sheared flow cases
05
1015
20
0
1
2
0
0.2
0.4
0.6
0.8
1
x 10-4
f(Hz)
Bare Riser and Sheared Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
0 5 10 15 20 25 30 35 40
0
0.5
1
1.5
2
2.5
0
2
4
6
8
x 10-6
f(Hz)
Bare Riser and Sheared Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)
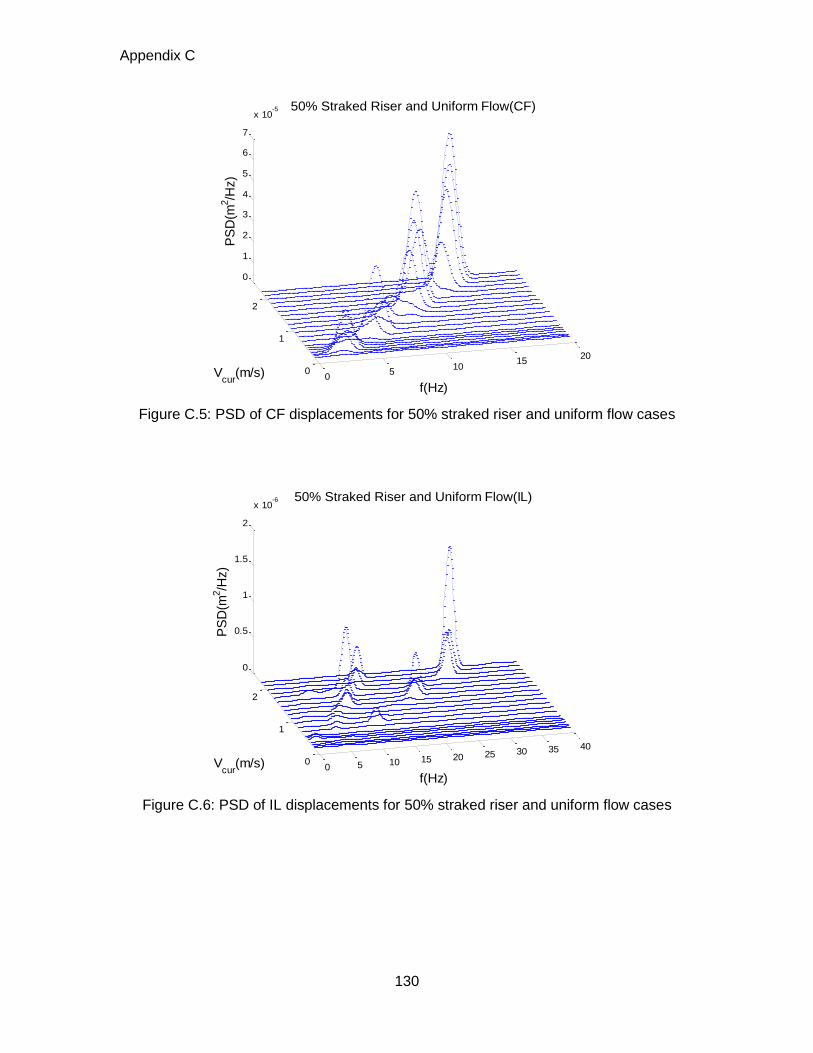
Appendix C
130
Figure C.5: PSD of CF displacements for 50% straked riser and uniform flow cases
Figure C.6: PSD of IL displacements for 50% straked riser and uniform flow cases
05
1015
20
0
1
2
0
1
2
3
4
5
6
7
x 10-5
f(Hz)
50% Straked Riser and Uniform Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
0 5 10 15 20 25 30 35 40
0
1
2
0
0.5
1
1.5
2
x 10-6
f(Hz)
50% Straked Riser and Uniform Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)
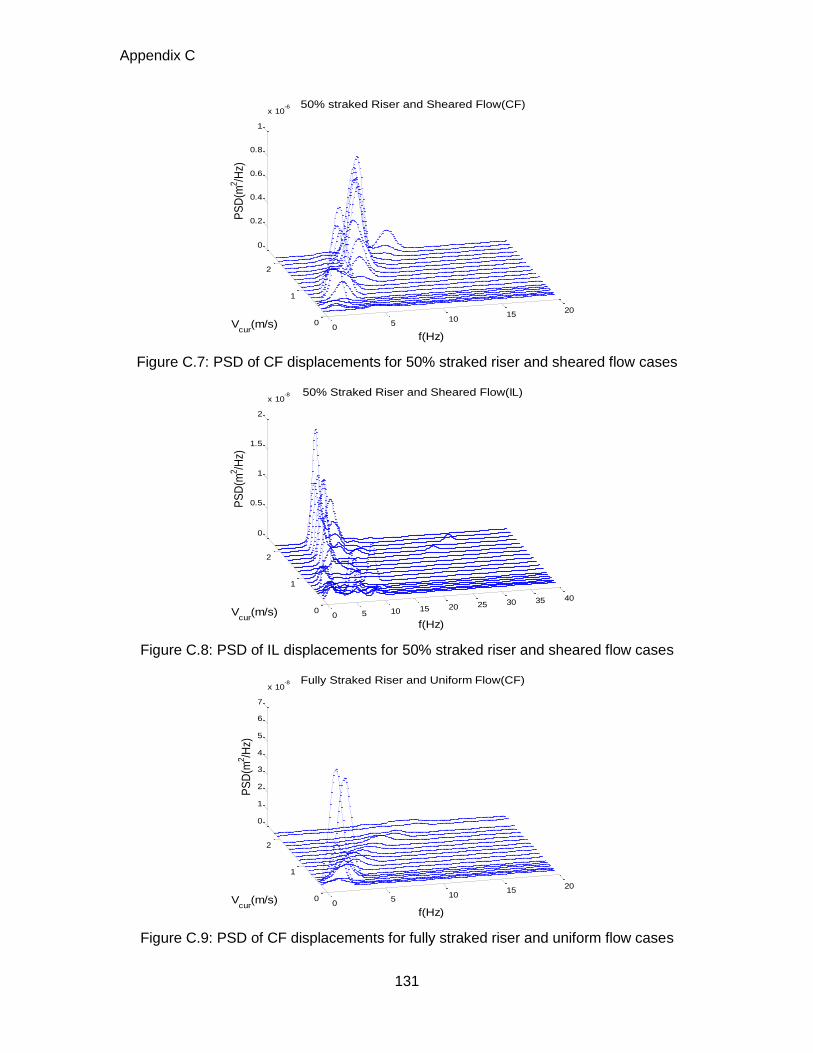
Appendix C
131
Figure C.7: PSD of CF displacements for 50% straked riser and sheared flow cases
Figure C.8: PSD of IL displacements for 50% straked riser and sheared flow cases
Figure C.9: PSD of CF displacements for fully straked riser and uniform flow cases
05
1015
20
0
1
2
0
0.2
0.4
0.6
0.8
1
x 10-6
f(Hz)
50% straked Riser and Sheared Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
0 5 10 15 20 25 30 35 40
0
1
2
0
0.5
1
1.5
2
x 10-8
f(Hz)
50% Straked Riser and Sheared Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)
05
1015
20
0
1
2
0
1
2
3
4
5
6
7
x 10-8
f(Hz)
Fully Straked Riser and Uniform Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
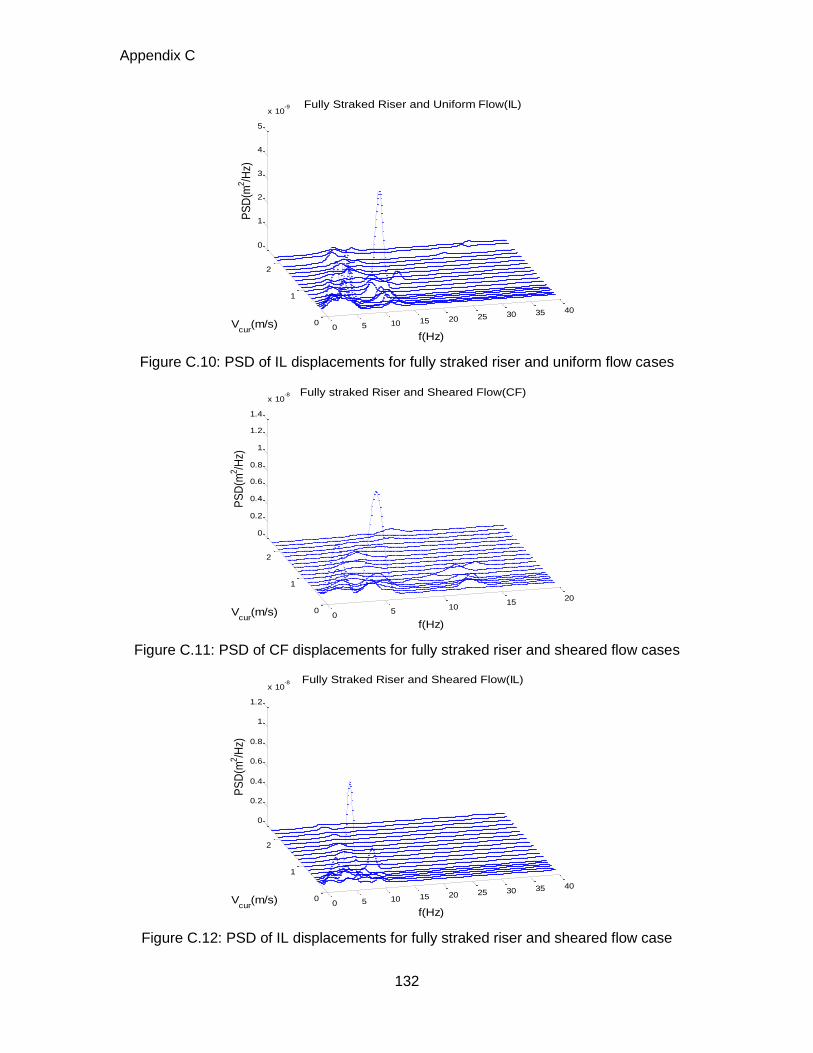
Appendix C
132
Figure C.10: PSD of IL displacements for fully straked riser and uniform flow cases
Figure C.11: PSD of CF displacements for fully straked riser and sheared flow cases
Figure C.12: PSD of IL displacements for fully straked riser and sheared flow case
0 5 10 15 20 25 30 35 40
0
1
2
0
1
2
3
4
5
x 10-9
f(Hz)
Fully Straked Riser and Uniform Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)
05
1015
20
0
1
2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
x 10-8
f(Hz)
Fully straked Riser and Sheared Flow(CF)
Vcur
(m/s)
PS
D(m
2/H
z)
0 5 10 15 20 25 30 35 40
0
1
2
0
0.2
0.4
0.6
0.8
1
1.2
x 10-8
f(Hz)
Fully Straked Riser and Sheared Flow(IL)
Vcur
(m/s)
PS
D(m
2/H
z)

Appendix C
133
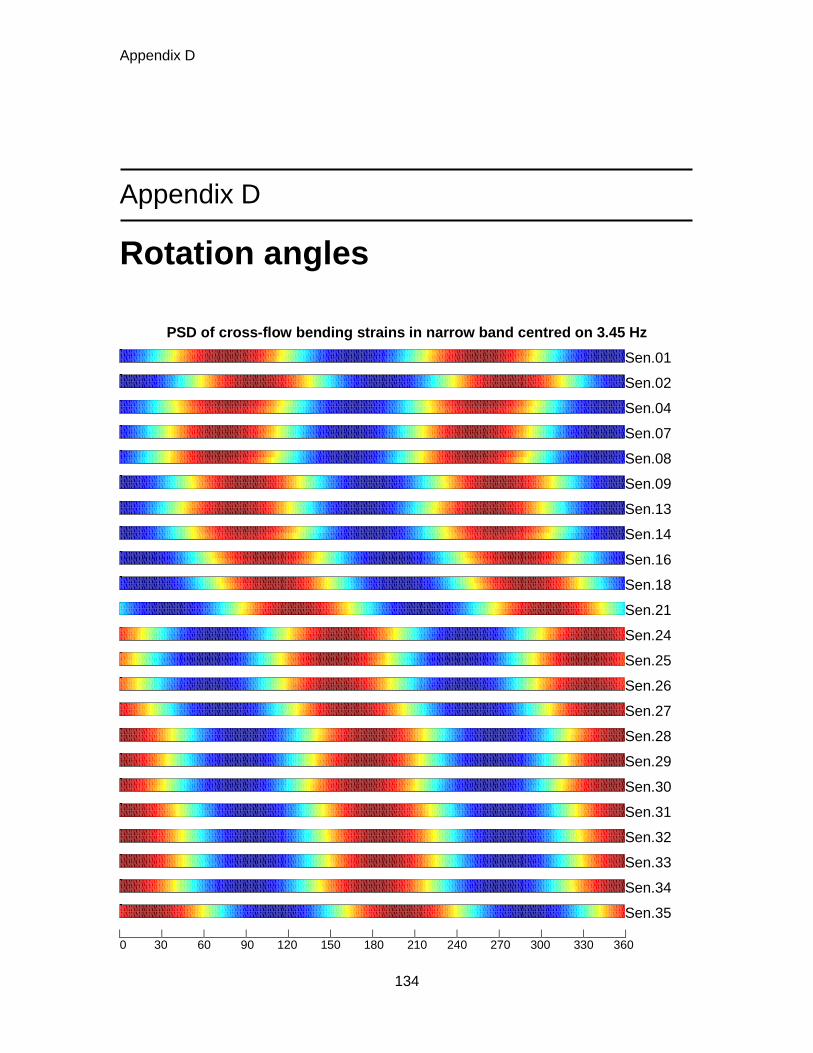
Appendix D
134
Appendix D
Rotation angles
PSD of cross-flow bending strains in narrow band centred on 3.45 Hz
Sen.01
Sen.02
Sen.04
Sen.07
Sen.08
Sen.09
Sen.13
Sen.14
Sen.16
Sen.18
Sen.21
Sen.24
Sen.25
Sen.26
Sen.27
Sen.28
Sen.29
Sen.30
Sen.31
Sen.32
Sen.33
Sen.34
Sen.35
0 30 60 90 120 150 180 210 240 270 300 330 360
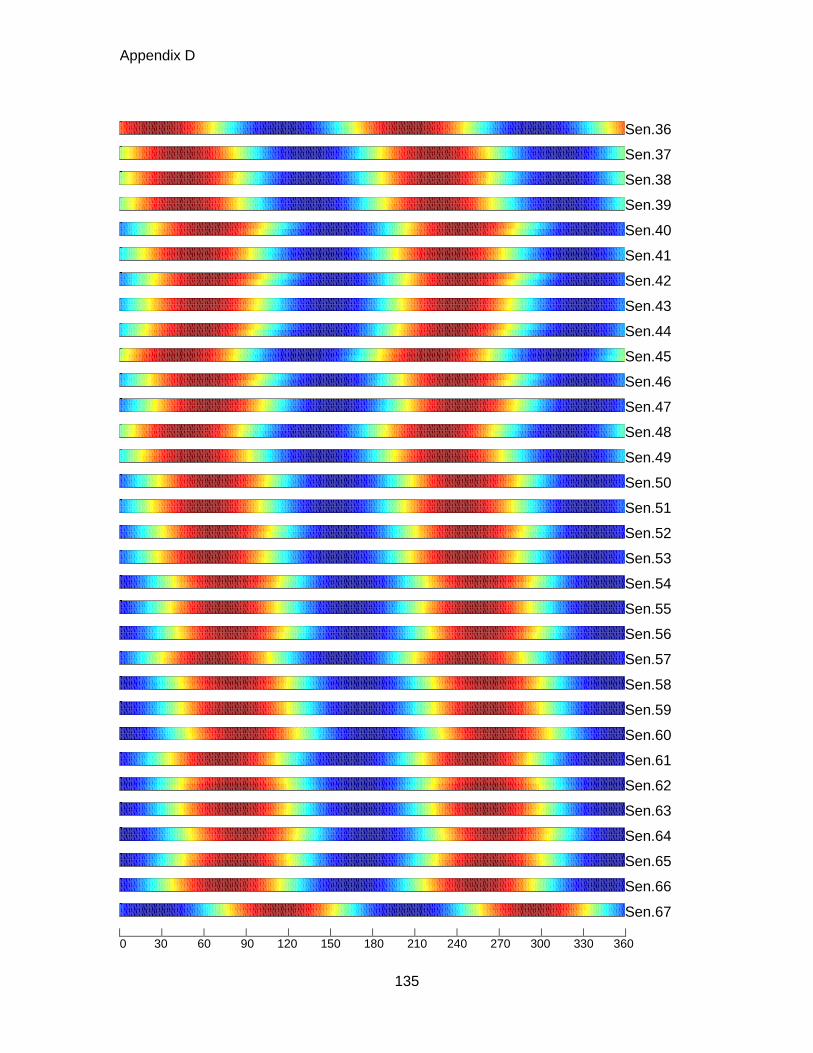
Appendix D
135
Sen.36
Sen.37
Sen.38
Sen.39
Sen.40
Sen.41
Sen.42
Sen.43
Sen.44
Sen.45
Sen.46
Sen.47
Sen.48
Sen.49
Sen.50
Sen.51
Sen.52
Sen.53
Sen.54
Sen.55
Sen.56
Sen.57
Sen.58
Sen.59
Sen.60
Sen.61
Sen.62
Sen.63
Sen.64
Sen.65
Sen.66
Sen.67
0 30 60 90 120 150 180 210 240 270 300 330 360
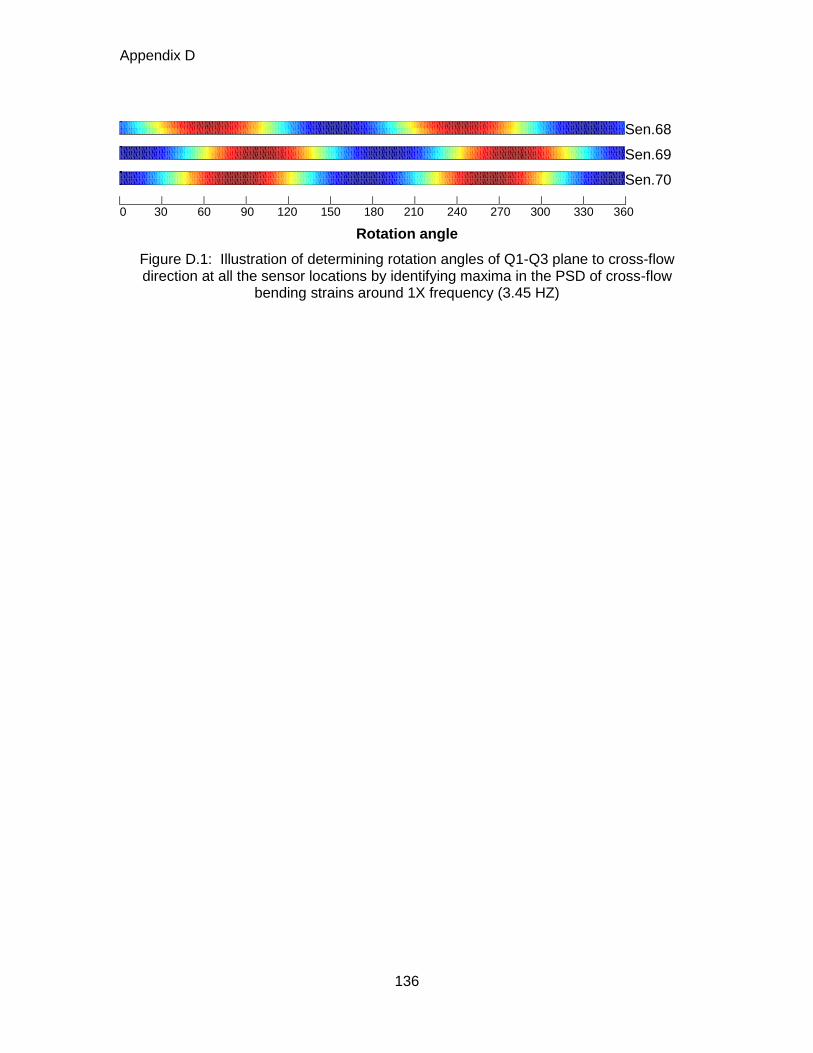
Appendix D
136
Sen.68
Sen.69
Sen.70
0 30 60 90 120 150 180 210 240 270 300 330 360
Rotation angle
Figure D.1: Illustration of determining rotation angles of Q1-Q3 plane to cross-flow direction at all the sensor locations by identifying maxima in the PSD of cross-flow
bending strains around 1X frequency (3.45 HZ)
0 50 100 150 200 250 300 350



![EXPERIMENTS ON VORTEX-INDUCED VIBRATION …ijame.ump.edu.my/images/Volume_11 June 2015/31_Rahman and... · EXPERIMENTS ON VORTEX-INDUCED VIBRATION OF A VERTICAL ... Blevins [10],](https://img.pdfslide.net/doc/110x75/5b83b77d7f8b9a31608def8f/experiments-on-vortex-induced-vibration-ijameumpedumyimagesvolume11-june-201531rahman.jpg)

























