Embed Size (px)
Citation preview

Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved
NCAR In Situ Vertical winds-based EDR
Estimation Algorithm
Description
March 21, 2013
Authors: Dr. Gregory Meymaris and Dr. Robert Sharman
Affiliation: University Corporation for Atmospheric Research (UCAR)

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 1
Table of Contents Introduction ......................................................................................................................... 2
EDR Algorithm Overview .................................................................................................. 3
Quality Control Algorithm .............................................................................................. 4
Vertical Wind Calculation .............................................................................................. 8
Maximum Likelihood Estimation ................................................................................... 9
Data Sampling Rates ..................................................................................................... 16
Event Based Triggering Logic .......................................................................................... 16
References ......................................................................................................................... 20

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 2
Introduction
Historically, there has been one main source for turbulence observations, namely pilot
reports (PIREPS). There have been problems using PIREPS including:
• time/position fixes are often far away from where/when the turbulence occurred
• the turbulence intensity reported is subjective, not measured
• the turbulence intensity reported is not atmospheric but rather aircraft-centric
• there are a dearth of NULL reports
These deficiencies make PIREPs ill-suited for providing maps of atmospheric (i.e., aircraft
independent) turbulence levels over aircraft flight routes. To address these difficulties, NCAR,
under sponsorship from the FAA Aviation Weather Research Program (AWRP), has developed
an in situ turbulence monitoring system (Cornman et al. 1995, 2004) which has now been
implemented on three major U.S. commercial air carriers composed of three different aircraft
types. These reports are routine, completely automated, are aircraft independent, and are
accurate to within at least about 10 km and 1 min, and are therefore ideal for operational
purposes (Farrar et al., 2013) and turbulence case studies (e.g., Lane et al., 2012).
This system estimates values of the cube rate of the eddy dissipation rate, referred to as
the EDR, an atmospheric turbulence intensity metric. The EDR estimation algorithm is coded as
a C library which is then loaded on board the Aircraft Conditioning and Monitoring System
(ACMS) or other suitable onboard computer. Once on board the aircraft, the software runs
continuously when the aircraft is off the ground, producing mean and peak EDR over the last
minute of flight once every minute. While for the original accelerometer based version, running
currently on United B757-200s, all one minute mean and peak EDR estimates are downlinked,
the newer vertical wind-based version, running currently on Delta B737NG and (recently on)

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 3
Delta B767-300/400, and soon on some Southwest B737NGs, has the capability to report only
turbulence events plus occasional (e.g. 15 minute), routine reports. The EDR algorithm
described in this document pertains only to the vertical wind based algorithm and not the older
accelerometer based one. (described in Cornman et al., 1995)..
While there are a few adjustable parameters that are aircraft dependent, the EDR itself is
aircraft independent. This is important since an aircraft dependent turbulence metric would need
to be accompanied by aircraft data, such as airspeed, altitude, mass, and type in order for others
to be able to interpret it. While this is certainly possible, it is easier to just report one aircraft
independent quantity. An important component of the EDR algorithm is sophisticated quality
control (QC), which is implemented onboard as part of the software package, but may have a
ground-based component as well.
This document describes the vertical wind based EDR algorithm and the event triggering
logic.
EDR Algorithm Overview
The in situ turbulence algorithm is a vertical winds-based maximum-likelihood algorithm
which can be conceptually thought of as having 3 components: the vertical wind calculation, the
maximum likelihood EDR estimation, and, integrated into the previous two, a quality control
algorithm. The algorithm takes as inputs (see Table 1) the left and right angle of attack ( 1 and
2 ; deg.), true airspeed (V; m s-1
), roll (; deg.), pitch (θ; deg), and inertial vertical velocity ( h ;
ms-1
; positive up) and outputs, once per minute, the mean and peak EDR (1/3̂ ; m
2/3 s
-1), along
with associated quality control metrics. Pressure altitude, h (m), and vertical acceleration, gw, are
not used in the algorithm, but are used in the tuning.

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 4
Parameter Symbol Required for
Algorithm
Units Minimum
Sampling
Frequency
(Hz)
Minimum
precision
UTC date and
time
NA No NA 4 0.125 s
Aircraft type NA Yes1 N/A
True Airspeed VT Yes m s-1
4 0.036 m s-1
Auto-pilot
(on/off)
No 4
Left vane angle
of attack (+
nose up)
1 Yes deg 4 0.05 deg
Right vane
angle of attack
(+ nose up)
2 Yes deg 4 0.05 deg
Pitch + nose up) Yes deg 4 0.02 deg
Body pitch rate No deg s-1
4 0.02 deg s-1
Roll (+ right
wing down Yes deg 4 0.02 deg
Inertial Vertical
Velocity (+
upward)
IVV Yes m s-1
4 0.00508 m s-1
Barometric
Altitude
Z No feet MSL 1 1 ft
Vertical
Acceleration
gw No g 4 0.003 g
Current aircraft
weight
M No lbs 1 100 lbs
Latitude No deg 1 0.0002 deg
Longitude No deg 1 0.0002 deg
Wind Speed No knots 1 1 knot
Wind Direction No deg 1 1 deg Table 1: List of required parameters and update frequencies for vertical winds-based algorithm including running real-
time, tuning, and verification.
Quality Control Algorithm
The quality control algorithm is crucial as minor spikes or steps in the data can result in
substantial EDR values, and, in our experience, these spikes are more frequent (often several per
1 Via adaptable parameter initialization constant values.

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 5
flight) than the elevated turbulence events. In other words, failure to mitigate these could result
in a high (turbulence) false alarm rate.
The overarching idea for the quality control algorithm is that (generally) each value of
each data field is assigned a confidence (0 representing low and 1 representing high confidence)
and a QC flag (0/1 indicating no problem/problem found). Initially, confidences are set to 1 and
QC flags are set to 0. If a problem is identified with a value, then its confidence is lowered and
its QC flag is set. There are several ways that problems are identified. First, the flag from the
databus may be set, indicating that the data value, as indicated on the bus, is bad. Second, the
algorithm inputs and the (derived) vertical winds (w) are bounds checked. Third, derived
quantities such as w have an inherited confidence from their input fields. Fourth, V and w are
processed through the median QC algorithm described below. If the data is found to be
suspicious for the first two ways, the confidences are set to 0 and the QC flag is set to 1. The
third and fourth require further explanation.
There are several derived high-rate quantities in the algorithm: the averaged angle of
attack ( a ), the body-axis angle of attack ( b ), and w. The general paradigm is that if an input
field’s flag is set then the derived field’s is also and thus the initial QC flag for the derived field
is simply the logical OR of its inputs. The derived field’s confidence is initially set to the
minimum input confidence discounted by a factor. Namely, the derived confidence is
j i
i j
c f c
where ci are the enumerated input confidences, arg min ii
j c and f is the piecewise
linear function with vertices (0,0), (0.5,1), (1,1). a is a special case because it is nominally just
the average of two values that should be about the same. So if one is bad but the other is good,
then the good can be used and the bad ignored. So, for a , if both input confidences are above

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 6
threshold (0.5) then the confidence is the average of the two input confidences. If only one input
has an above threshold confidence, then the resultant confidence is the confidence of the good
one scaled by a penalty (nominally 0.8). If both inputs are below threshold then the confidence
for a is set to 0.
The median QC algorithm is designed to detect spikes and steps. There are three separate
components. The first component, the so-called median QC z-confidence, is similar to the
median absolute deviation (MAD) method discussed in Iglewicz and Hoaglin, 1993. First, the
5th
, 10th
, 15th
, 20th
, 25th
, 30th
, 50th
, 70th
, 75th
, 80th
, 85th
, 90th
, and 95th
percentiles are computed on
a sliding window of data. Currently the window for 8 Hz data is 31. The value to be quality
controlled is always the center value. Values in the window that have below threshold
confidence, as input into the median QC algorithm, are not used to compute the percentiles. The
idea for z-confidence median QC confidence is to compute a robust version of the z-statistic.
Namely,
50
n
x xz
R
(1)
where 100n n nR P P , and Pn is the nth
percentile. z is then input into a piece-wise linear
confidence map (vertices may in general depend on the field, but the ones used for V and w are
(0,1), (1.21,1), 0,2.21), (∞,0)) to generate the so-called z-confidence. Robust statistics are used
to mitigate the effects of large outliers in the window that would significantly bias the mean and
standard deviation. The choice of n is guided by the balance of two competing issues. If n is
chosen to be small (say 5), then most points (nominally, all but the highest and lowest two) in the
window are used to determine the percentile ranges. Thus, if there is a short, high intensity
turbulence event within the window, the value of Rn will be larger, ensuring that z is small. This

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 7
is the desired effect in the case that the point being evaluated (center) is part of the turbulence.
On the other hand, if a larger number of points are spikes or constitute a step, then the small
value of z is deleterious. In other words, small values of n have fewer false alarms for spikes, but
also a lower detection rate. Contrariwise, larger values of n have more false alarms for
spikes/steps with a higher detection rate. To improve the skill, instead of picking one value, Rn is
computed for n at 5, 10, 15, 20, 25, and 30. The adjacent ratios are computed (namely R5/R10,
R10/R15, R15/R20, R20/R25, and R25/R30). The condition 5 /n n RR R T (TR is nominally 4.5) is
checked for 10,1 ,35 0n . If the condition is true for any n, then the Rn for the largest such n
is used to compute z. If all ratios are below threshold, then R5, is used. This procedure will tend
to eliminate spikes and steps from the calculation of Rn. This principal behind this is that in the
case of good winds data these percentile-ranges decrease more slowly than the case of the
existence of data quality problems. This will not work if there are a very large number of
spikes/steps or if the data gradually transitions from nominal into a step. However, these cases
appear to be quite rare.
Note that the thresholds for the piecewise-linear confidence map are the same even if R5
is not used. This is done for simplicity, but it has the benefit that if a different Rn is picked then
R5, the result is a generally larger z, and hence, a lower the resultant confidence.
Additionally, two more confidences are computed and combined with to arrive at the
final median QC confidence. The first, the so-called percentile-range confidence, is computed
by applying a piecewise-linear confidence map to Rn, with larger values of Rn associated with
low confidences. This helps guard against the case where the z-confidence is low because there
are a large number of spikes or a long step that results in a large Rn. The second, the so-called
percent-good confidence, is computed by applying a piecewise-linear confidence map to the

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 8
percentage of points in the window with higher than threshold (nominally 0.5) confidence as
determined before applying the median QC algorithm. If this was done afterwards then the
algorithm would frequently get stuck in a state determining all data as bad. The final median QC
confidence is simply the product of the three intermediate confidences (z-, percentile-range, and
percent-good confidences).
After the initial input bounds check and also after the median QC algorithm, data with
confidence below the confidence threshold is linearly interpolated over as long as the number of
“bad” data points in a row is 3 or less. The confidences at those places are also linearly
interpolated. The flags, however, are left set to 1.
Vertical Wind Calculation
To compute the vertical winds from the inputs, the body-axis angle of attack ( b ) need to
be computed. First, if available, the left and right angle of attack ( 1 and 2 ) are averaged ( a
). If one of them has been found to be bad (below threshold confidence), then the other is used.
If both are bad, then it is flagged as bad and the confidence is set to 0. The body-axis angle of
attack is computed by 1 0b aa a .
Determining, and 1a is done by considering the following. If the aircraft is not changing
altitude and is flying under nominally smooth conditions, then, on average, b . The vertical
wind will cause this to not be instantaneously true. So given several flight hours of data,
preferably including aircraft flying on different days and different wind conditions, a least-
squares linear fit is performed for the following model 1 0ca a . Care should be taken to
limit the data to straight and level flight under smooth conditions. This is accomplished by

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 9
requiring: 30,000h ft , 10.5h ms , 1 .025wg (where gw is the vertical accelerometer in
g’s), and 1 .
Finally, the vertical winds are computed from V, b , θ, , and h (Parks, et. al., 1985;
Cornman, et.al., 2004):
sin cos cocos s sinb bw V h (2)
Note that there could be a pitch rate correction factor, like that in Lenschow (1972), namely
c180
osM
, where M is the sensor moment arm in meters, but in practice this term is
negligible and leads to nearly identical EDR estimates, under most circumstances. The
computation of w is performed at the common sampling rate (fs) for all of the data fields.
Maximum Likelihood Estimation
The spectral-domain based maximum likelihood estimation method of estimating ε is
described in Smalikho (1997). The basic calculation is to divide, frequency bin by frequency
bin, the empirical wind power spectrum by the theoretical power spectrum, where
2/3 1 m4/3
s-2
, over a certain range of frequencies, and then average the ratios to compute 2/3̂ .
To compute the empirical wind power spectrum, the data are first linearly de-trended,
using a least-squares fit.
21 0floord mk kw w k (3)
for , 10, mk , where 10 sm f (corresponding to 10 s of wind data). 1 0, and are linear
and constant (resp.) coefficients from the least-squares best fit, computed using the normal
equations, with x-values 2floor mk for , 10, mk , and y-values kw . Note that much of

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 10
the computations in the normal equations rely only on the x-values, which are fixed, and thus can
be precomputed.
Next, a power normalized Tukey (tapered cosine; Harris, 1978) window is applied. The
m-point Tukey window can be formulated as
12 1
1
112
1
1
1
cos 0
2
2
cos 1
kM
m k
M
k
k M
k
m M
M m M
k m
(4)
where floor 0.1 0.2M m . In the more traditional formulation of the Tukey window, this
corresponds to a taper factor of about 0.2. The power normalized Tukey window is
1
21
0
kk m
m j
j
(5)
The linear de-trended and windowed vertical wind time-series is
k
dW
k
d
kw w (6)
Linear de-trending and the window function application mitigate spectral leakage, though
at the cost of corrupting the wind spectrum at lower frequencies. The Fourier transform is now
applied:
21
2 /
0
2ˆm
dW i
k j
js
jk mS w ef m
(7)
where ,50, sfk , and i is the complex imaginary number. Note that the kth
frequency
corresponds to /skf m Hz. This computation is typically done by via fast Fourier transform,
appropriately scaled and halved. Finally, 2/3̂ is computed by

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 11
2/3
ˆ1ˆ
1
h
l
k
k
k kh l k
S
k k S
(8)
where kl and kh are the lower and upper index bounds over which the average is taken. These
correspond to the frequencies fl and fh.
Several possible models could be used. The von Kármán spectrum (e.g. Frehlich, et. al.,
2001) would be a likely choice except that it does not take into account the finite-length, discrete
time sampling, or the window function. The model spectrum needs to take into account the
procedure for generating the empirical spectrum or else the result can be biased and will not be
truly a maximum likelihood method. The form chosen is as follows. First, the von Kármán
transverse autocorrelation function (Frehlich, et. al., 2001), given by
2 / /NN DG r LB r G r L (9)
is sampled at / skV f , where , 10, mk , L is a length scale (nominally 669 m; corresponds
to an integral length scale of 500 m), σ2 is the variance of the velocity component, and
2/3 1/3
1/3
2
1/ 3
xG x K x
(10)
4/3
2/31/32 1/ 3D
xG x K x
(11)
Here, Γ is the Gamma function and K is the modified Bessel function. Note that G and GD are
not technically defined for 0x , so the value used there is defined by their limit at 0, namely,
0 1G and 0 0DG . The relationship between σ2 and ε is given in Cornman, et. al. (1995)
as
2 2/3 1/2 2/3
1/ 39
55 5 / 6oA L
(12)

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 12
where 1.6A (A has been estimated to be between 1.5 to 1.7; Kristensen and Lenschow 1987;
Mann 1994; Cornman et al. 1995). Next, the biased autocorrelation function for the
(normalized) Tukey window, , must be computed:
1
0
1 m k
k j j k
j
Tm
(13)
Finally, the average periodogram from the model spectrum can be computed (Frehlich, et. al.,
2001):
1
2 /
0
2Re / 0
mva ijk m
k j NN s NN
js
S T B jV f e Bf
(14)
Sva
is the exact form of the spectrum model given that a frozen von Kármán wind field is
sampled m times with a / sV f m spacing, including that a window, , is applied to the data
before the power spectrum is computed. Note that the only aircraft dependent parameter for vaS
is V. So, in practice, a 2-D table (frequency index vs. V) of vaS for different true airspeeds can
be computed offline and simply stored in the software. We compute and store for
65,70 26, , 5V m s-1
, which is sufficient for the aircraft used to date. Some newer aircraft
may need to have the upper range extended. At run-time, the vaS used is taken from the median
V over the same time interval as the vertical winds, and interpolating the table.
Four issues are, thus far, unaccounted for: the unknown true length scale, the linear de-
trending of the data, the noise signal, and the fact that the vertical winds are typically computed
from filtered fields. The first three are all handled the same way, namely by use of the cutoffs kl
and kh in eqn (8). fl and fh, the frequencies corresponding to indices kl and kh (resp.) are set to 0.5
and 3.5 Hz for the 8 Hz implementations. The effects due to the unknown outer length scale and

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 13
the linear-detrending of the data are largely limited to the lowest frequencies. Noise mostly
affects the higher frequencies since the turbulence spectrum has the lowest power there.
The aircraft fields used to compute the winds are typically filtered in the analog-to-digital
(A/D) conversion. In the case of commercial aircraft the details of the filtering are often hard to
obtain. Additionally, w is a non-linear function of the input fields (see eqn. (2)), though most of
the time, for small angle fluctuations, it is approximately linear. It is important to know the
model as well as possible to calibrate (i.e. minimize bias) the algorithm.
Also, it is generally desirable to have one piece of software that can be deployed on
different aircraft types; failure to do so drives up the cost of deployment. Avionics boxes, like
the aircraft monitoring system (ACMS) have limited processing capabilities and thus directly
computing the wind spectrum model there has not been feasible. Even if it were feasible, there is
still the issue that one might encounter an aircraft that employs different filtering techniques that
are not captured by the implementation. Passing a table of model values via an initialization
routine, was also considered but ultimately rejected because of the risk that not all systems may
be able to pass approximately 1600 (spectra for about 40 values of V each with about 40
frequency bins) values to the insitu library. To address these issues, we developed a so-called
pseudo-maximum likelihood, i.e. the wrong model is used (e.g. Gong and Samaniego, 1981;
Gourieroux, et. al., 1984). Instead of using the tailored filtered, aliased, von Kármán model, the
unfiltered aliased, von Kármán model is used. This will lead to a biased estimate of ε2/3
.
However, the bias due to using a different model is fixed. Namely, the relative bias can be
shown to be given by:
1
1
h
l
k vaf
k
vak kh l k
S
k k S (15)

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 14
The correction factor, γ, is set to the inverse of (15). Assuming the independence of the errors of
ˆkS for different k, the variance can thus be shown to be increased by the multiplicative factor:
22
1
h
l
k vaf
k
vak kh l k
S
k k S
(16)
Thus, if the exact correct model is known, the bias induced from using Sva
can be
corrected, at the cost having an increased variance. This allows the software to always use the
same model, namely Sva
, regardless of the actual correct model. Note that if the two models
differ greatly, the increase in variance can be significant. One would expect the significant
deviations between Sva
and Svaf
to be at the higher frequencies since A/D filters are low-pass, and
thus fh can be adjusted lower to exclude these frequencies. See Table 2 for the correction factor
and associated variance increase for an example scenario
fs 8 Hz
V 250 m s-1
Li 500 m
Filter Butterworth
Filter order 2
Stop-band cutoff 3 Hz
fl 0.5 Hz
fh 3.5 Hz
γ 1.73
Variance Increase
after correction
1.19
Table 2: Example bias and variance from using Sva ranther than S
vaf for the approximated filter from a Boeing 767-
300/400 with V=250 m s-1.
One issue with this is that tweaking the filter parameters slightly can lead to fairly
different correction factors, and the “true” filter settings are not known. To address this we note

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 15
that the 2-pole Butterworth with 3 Hz stop-band cutoff would have almost no difference (1.02) in
correction factor to that of the 4-pole if the frequency bands is, say, 0.5 to 1.5 Hz. Thus, the
following procedure can be performed to arrive at the correction factor. Over a large dataset of
aircraft data with some turbulence events, compute 2/3ˆvaf ( 2/3̂ based on vafS ) with no correction
factor, using an approximate filter, but only over a limited band of frequencies in the pass-band,
say 0.5 to 1.5 Hz. Second, compute 2/3ˆva ( 2/3̂ based on vaS ) over the full band of desired
frequencies (e.g. 0.5 Hz to 3.5 Hz for 8sf Hz). Lastly, compute the slope of the errors-in-
variables linear regression (Parks, et. al., 1989). This should approximate γ. In our case, we
obtained correction factors between 1.61 and 1.76 for various settings of lower bounds for the
data used in the fit as well as estimated variances. This range agrees nicely with the correction
factor 1.73 determined in Table 2.
Finally, the (corrected, if necessary) 2/3̂ is computed every 5 s. The confidence is the
minimum of two confidences: the average of the input w confidences, and the so-called, number-
of-good-inputs confidence. The latter is computed by counting the number times the flag for w
is set. Since w is derived from all of the inputs, if any of the inputs’ flags are set, then the
derived w flag will be set. This count will be a number between 0 and 10fs. A piece-wise linear
function is applied to this count with vertices (0,1), ( 0.0625·10 sf ,1), ( 0.1250·10 sf ,0), and
(10fs,0) to obtain the confidence. Then, once per minute, the peak and confidence weighted are
computed. The confidence weighted mean is computed using only those 2/3̂ with above
confidence threshold (nominally 0.5). The confidence of the mean is simply the average of the
input confidences where confidences below threshold are set to 0. The peak is the largest 2/3̂
above confidence threshold, and its corresponding confidence is simply the confidence of that

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 16
particular 2/3̂ discounted by 1/12 (since there are 12
2/3̂ measurements per minute) for every
2/3̂ that was greater but had a below confidence threshold. The square root of the mean and
peak are reported along with their associated confidences.
Data Sampling Rates
Care must be taken with respect to the data rates. Ideally, all input fields should be
sampled at the rate fs with a proper de-aliasing filter applied. Thus if t was sampled at 2fs, proper
resampling techniques should be used (e.g. interpolate to 10fs, apply de-aliasing (low-pass) filter
with stop-band cutoff at 0.4 sf , and then downsample to fs). Alternatively, having one or more of
the fields available at a data rate less than fs, can have deleterious effects on the spectral shape of
the winds. Practically speaking, the critical fields appear to be V, and b as they contribute the
most to the spectral content of the wind spectrum, though a rigorous analysis of this needs to be
performed. Recommended minimum data sampling rates are provided in Table 1.
Event Based Triggering Logic
Ideally, all once per minute turbulence measurements would be downlinked, but, using
current standard air-to-ground communications (e.g. VHF, SATCOM), this would result in
substantial costs to downlink mostly null turbulence (smooth) reports. Some null turbulence
reports are helpful. For example, a dispatcher can see where aircraft are experiencing smooth
conditions and possibly route other aircraft into that area. Additionally, forecasting models need
both positive (turbulence) and negative (smooth) events to be skillful. To try to balance these
needs, a report triggering logic was developed and implemented to decide which and when EDR
measurements should be reported.
2/3̂

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 17
The reporting scheme augments routine reports (sometimes referred to as heartbeats),
spaced 15 to 20 minutes and consisting of just one mean/peak EDR measurement, with
turbulence event-based triggering logic.
Turbulence Event Reports
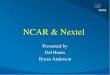
There are 3 types of minimum events.
Type 1: Higher intensity experienced.
Type 2: Fairly consistent medium intensity experienced over the last 6 minutes.
Type 3: Consistent lower intensity experienced over the last 6 minutes.
Figure 1: Cartoon illustrating the three different types of events that would trigger a downlink report.
More formally:
Type 1: peak EDR ≥ T1 from the last minute. 6 minutes later a followup report is
also generated.
Type 2: peak EDR ≥ T2 for at least 3 out of the last 6 minutes. All 6
measurements are reported. 6 minutes later a followup report is also generated.

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 18
Type 3: mean EDR ≥ T3 for at least 4 out of the last 6 minutes. All 6 minutes are
reported. No followup report is reported.
Followup reports are generated after type 1 and 2 events so that users can see “both
sides” of the event (before and after). Otherwise, users would only see data before the event.
Followup reports always contain 6 measurements.
In all implementations thus far,
1
2
3
0.18
0.12
0.06
T
T
T
(17)
In our experience thus far, the bulk of the event triggered reports are Type 1 and their associated
followups, though the proportions will vary according to the turbulence climatology over the
route structure of the airline.
Further, the logic is designed to limit the possibility that mean/peak EDR measurements
are reported more than once. To see the detailed triggering logic, see the document In Situ
Turbulence – Event Reporting Algorithm at http://www.ral.ucar.edu/projects/in_situ_software.
Routine Reports
The goal for downlinkng routine reports is to provide some null turbulence data. Also,
some turbulence information can be inferred between reports (whether routine or event-based).
Namely, the turbulence was not strong enough to trigger and even-based report, and thus the
peak EDR had to be less than 0.18. Using this information, it is possible to fill in the gaps. The
times of these missing EDRs is easy to approximate since EDR measurements are spaced by 1
minute. The 3-D positions can be linearly interpolated, which generally should lead to good
results. It is possible to use the Aircraft Situational Display to Industry data stream to do a better
job.

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 19
The first routine report is generated immediately after the first mean/peak EDR is
computed, which ideally should be 1 minute after the take-off. Routine reports are generated
thereafter at a configurable but constant time interval, ideally less than 20 minutes. The only
time routine reports are not generated is if an event-based report is being generated at the same
time. If there are any unreported mean/peak EDRs at wheels-down, the last routine report is
generated and downlinked.

NCAR In Situ Turbulence Algorithm Description
Ver 0.9, 20130321 ©1991-2013 UCAR RAL All Rights Reserved 20
References
Cornman, L. B., C. S. Morse, and G. Cunning, 1995: Real-time estimation of atmospheric
turbulence severity from in-situ aircraft measurements. J. Aircraft, 32, 171-177.
Cornman, L. B., G. Meymaris and M. Limber, 2004: An update on the FAA Aviation weather
Research Program’s in situ turbulence measurement and reporting system. 11th Conf. of
Aviation, Range and Aerospace Meteorology, Hyannis, MA.
Harris, Fredric J., 1978: On the use of Windows for Harmonic Analysis with the Discrete Fourier
Transform. Proceedings of the IEEE 66 (1): 51-83.
Farrar, T. J., 2013: Integration of Real-time In Situ Turbulence Reports Into Airline Flight
Operations. 16th Conf. of Aviation, Range and Aerospace Meteorology, Austin, TX.
Frehlich R. J., 2000: Simulation of coherent Doppler lidar performance for space-based
platforms. J. Appl. Meteor., 39, 245–262.
Frehlich R. J., L. Cornman, and R. Sharman, 2001: Simulation of three dimensional turbulent
velocity fields. J. Appl. Meteor., 40, 246–258.
Gong, G., F. J. Samaniego, 1981: Pseudo Maximum Likelihood Estimation: Theory and
Applications. The Annals of Statistics , 9 (4), 861-869
Gourieroux, C; A. Monfort; and A. Trognon, 1984: Pseudo Maximum Likelihood Methods:
Theory. Econometrica, 52, 681-700.
Iglewicz, B., D. Hoaglin, 1993. How to detect and handle outliers. ASQC Quality Press [got this
reference from a thesis paper – have not actually seen this book].
Lane, T. P., R. D. Sharman, S. B. Trier, R. G. Fovell, and J. K. Williams, 2012. Recent advances
in the understanding of near-cloud turbulence. Bull. Amer. Meteor. Soc, 93, 499-515.
Lenschow, D.H. 1972: The measurement of air velocity and temperature using the NCAR
Buffalo Aircraft Measuring System. NCAR Tech. Note NCAR/TN-74+EDD, pp. 39.
Parks, E. K., R. C. Wingrove, R. E. Bach, and R. S. Mehta, 1985: Identification of Vortex-
Induced Clear Air Turbulence Using Airlines Flight Records. J. Aircr., 22 (2), 124-129.
Press, William H., B. P. Flannery, S. A. Teukolsky, and W. T. Vetterling, 1989: Numerical
Recipes: The Art of Scientific Computing. Cambridge: Cambridge Univ. Press, 666-670.
Smalikho, I. N., 1997: Accuracy of turbulent energy dissipation rate estimation from wind
velocity temporal spectrum. Atmos. Oceanic Opt., 10, 898–904.