Embed Size (px)
Citation preview

THE USE OF SYNCHROPHASORS IN ANALYSING VOLTAGE
STABILITY AND DETECTING VOLTAGE COLLAPSE
Daniel James Gill
Murdoch University
©2016
Daniel Gill
ALL RIGHTS RESERVED
i
Abstract
Voltage stability is an incredibly important concept in power systems engineering. Voltages can
become unstable due to numerous reasons, but the most common reason is when the power
generation and load gap is too large. In the worst case scenario, voltage instability can cause voltage
collapse. Voltage collapse refers to the shutdown of a power system due to its inability to maintain
adequate bus voltage levels. When the event of voltage collapse begins in a power system, circuit
protection systems can become unstable and inoperable.
With the increasing complexity of the world’s power transmission networks, it is becoming more and
more difficult to analyse and maintain power system stability. This report looks at how four voltage
stability analysis methods, namely, the Voltage Change Index (VCI), the Voltage Collapse Proximity
Indicator (VCPI), Continuation Power Flow (CPF) and the New Voltage Stability Index (NVSI), can be
used in conjunction with synchrophasor measurements to analyse voltage stability and detect
voltage collapse.
Results show that the NVSI is the best analysis method as it can detect the voltage collapse point as
well as give a good indication of the voltage stability of a system. The VCPI can predict voltage
collapse under specific scenarios, but it does not effectively show how close the system is to voltage
collapse at a given operating point. The VCI was determined to not be useful in detecting voltage
collapse, but it does, however, provide a useful bus ranking system that lists each load bus from
‘strongest’ to ‘weakest’ which in turn provides an indication of relative bus voltage stability levels.
The CPF method was found to not work well with synchrophasor measurements.
ii
Acknowledgements
I would like to express my utmost gratitude to the Murdoch University Engineering Faculty who have
provided me the knowledge and pathway to accomplish my dream of becoming an Electrical Power
Engineer. In particular, I would like to thank my Thesis supervisor Dr. Gregory Crebbin.
Additionally, I would like to thank all my family and friends for moulding me into the person I am
today.
iii
Table of Contents
List of Tables ------------------------------------------------------------------------------------------- vi
List of Figures ------------------------------------------------------------------------------------------ vii
1.0 Introduction --------------------------------------------------------------------------------------- Page 1
1.1 Thesis Introduction ------------------------------------------------------------------------- Page 1
1.2 Thesis Objective ----------------------------------------------------------------------------- Page 1
1.3 Thesis Organisation ------------------------------------------------------------------------- Page 1
2.0 Review of Phasors, Synchrophasors & PMU’s -------------------------------------------- Page 3
2.1 Phasor Overview ----------------------------------------------------------------------------- Page 3
2.2 Synchrophasor and PMU Overview ----------------------------------------------------- Page 3
3.0 Stability Review ---------------------------------------------------------------------------------- Page 5
3.1 Power System Stability --------------------------------------------------------------------- Page 5
3.2 Rotor Angle Stability ------------------------------------------------------------------------ Page 6
3.3 Frequency Stability -------------------------------------------------------------------------- Page 6
3.4 Voltage Stability ------------------------------------------------------------------------------ Page 6
3.5 Voltage Collapse Overview ---------------------------------------------------------------- Page 8
3.6 Real Voltage Collapse Incidents ---------------------------------------------------------- Page 8
4.0 Discussion and Methods of Voltage Stability Analysis ---------------------------------- Page 10
4.1 Voltage Stability Analysis Introduction ------------------------------------------------- Page 10
4.2 Definition of Dynamic and Static Analysis --------------------------------------------- Page 10
4.3 Voltage Stability Indices ------------------------------------------------------------------- Page 11
4.4 PV and QV Curves --------------------------------------------------------------------------- Page 11
4.5 L-Index Sensitivity Methods -------------------------------------------------------------- Page 14
4.6 Modal Analysis Using the Reduced Jacobian Matrix -------------------------------- Page 15
4.7 The Voltage Stability Index (VSI) --------------------------------------------------------- Page 17
4.8 The Voltage Collapse Proximity Indicator (VCPI) ------------------------------------- Page 18
iv
4.9 Relative Voltage Change Method / Voltage Change Index (VCI) ---------------------- Page 19
4.10 Continuation Power Flow (CPF) -------------------------------------------------------------- Page 20
4.11 New Voltage Stability Index (NVSI) ---------------------------------------------------------- Page 21
5.0 Research Methodology ------------------------------------------------------------------------------- Page 22
5.1 Research Methodology Introduction --------------------------------------------------------- Page 22
5.2 MATPOWER Overview ---------------------------------------------------------------------------- Page 22
5.3 Test System ------------------------------------------------------------------------------------------ Page 24
5.4 Research Methodology Overview -------------------------------------------------------------- Page 27
5.5 Methodology for Computing VCI’s ------------------------------------------------------------- Page 28
5.6 Methodology for Continuation Power Flow Analysis ------------------------------------- Page 28
5.7 Methodology for Computing VCPI’s ----------------------------------------------------------- Page 28
5.8 Methodology for Computing NVSI’s ----------------------------------------------------------- Page 29
6.0 Results and Discussion --------------------------------------------------------------------------------- Page 30
6.1 Voltage Change Index Analysis Results -------------------------------------------------------- Page 30
6.2 Continuation Power Flow Analysis Results --------------------------------------------------- Page 32
6.3 Voltage Collapse Proximity Indicator Analysis Results ------------------------------------- Page 34
6.4 New Voltage Stability Indicator Results ------------------------------------------------------- Page 38
6.5 Comparison of Bus Rankings --------------------------------------------------------------------- Page 40
6.6 Further Discussion of Results -------------------------------------------------------------------- Page 41
7.0 Conclusion and Recommendations ---------------------------------------------------------------- Page 42
7.1 Conclusion ------------------------------------------------------------------------------------------- Page 42
7.2 Recommendations --------------------------------------------------------------------------------- Page 43
8.0 Works Cited ---------------------------------------------------------------------------------------------- Page 44
Appendices ---------------------------------------------------------------------------------------------------- Page 47
Appendix A - Phasor Data from Voltage Change Index Analysis ----------------------------- Page 47
Appendix B - Phasor Data from Voltage Collapse Proximity Indicator Analysis ---------- Page 51
v
Appendix C - MATLAB Code to Run the Continuation Power Flow Solver on Bus b for the IEEE 14-
Bus Case at Base Operating Condition ------------------------------------------------------ Page 66
Appendix D - MATLAB Code to Run the Continuation Power Flow Solver on Bus b for the IEEE 14-
Bus Case at Base Operating Condition with Line k Removed -------------------------- Page 66
Appendix E - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Load Factor ----------------------------------------------------------------------------------------- Page 67
Appendix F - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Reactive Load Factor ----------------------------------------------------------------------------- Page 67
Appendix G - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Load Factor and Line k Removed -------------------------------------------------------------- Page 68
Appendix H - IEEE 14 Bus Case MATLAB M-File -------------------------------------------- Page 68
vi
List of Tables
Table 1: Critical Load Factors for Different Operating Conditions -------------------------------- Page 30
Table 2: Load Bus VCI’s for Different Operating Conditions ---------------------------------------- Page 30
Table 3: Load Bus VCI Rankings for Different Conditions -------------------------------------------- Page 31
Table 4: Load Bus VCI’s with Increasing Load Factor ------------------------------------------------- Page 31
Table 5: Voltage Collapse Point Data from CPF (Base Case) ---------------------------------------- Page 32
Table 6: Voltage Collapse Point Data from CPF (Line 4 Removed) -------------------------------- Page 32
Table 7: Voltage Collapse Point Data from CPF (Line 11 Removed) ------------------------------- Page 33
Table 8: Voltage Collapse Point Data from CPF (Line 17 Removed) ------------------------------- Page 33
Table 9: CPF Load Bus Rankings for Different Operating Conditions ------------------------------ Page 34
Table 10: Load Bus VCPI’s with Increasing Load Factor ----------------------------------------------- Page 35
Table 11: Load Bus VCPI Rankings for Different Load Factors -------------------------------------- Page 35
Table 12: Load Bus VCPI’s with Increasing Reactive Load Factor ---------------------------------- Page 36
Table 13: Load Bus VCPI Rankings for Different Reactive Load Factors -------------------------- Page 36
Table 14: Comparison of Pre and Post-Contingency Load Bus VCPI’s at
CLC (Line 4 Removed) ----------------------------------------------------------------------------------------- Page 37
Table 15: Load Bus VCPI Rankings for Pre and Post-Contingency Operating
Conditions at CLC (Line 4 Removed) ----------------------------------------------------------------------- Page 37
Table 16: Branch NVSI values with Increasing Load Factor ------------------------------------------- Page 38
Table 17: Branch NVSI Rankings for Increasing Load Factors ---------------------------------------- Page 39

vii
List of Figures
Figure 1: Reference Wave Produced by PMU ----------------------------------------------------- Page 3
Figure 2: Local Wave Measured by PMU ----------------------------------------------------------- Page 4
Figure 3: Typical PV Curve ------------------------------------------------------------------------------ Page 12
Figure 4: Typical QV Curve ------------------------------------------------------------------------------ Page 13
Figure 5: Equivalent 2 Bus System --------------------------------------------------------------------- Page 17
Figure 6: IEEE 14-Bus System Single Line Diagram ------------------------------------------------- Page 24
Figure 7: IEEE 14-Bus System Summary -------------------------------------------------------------- Pages 25-26
1
1.0 Introduction
1.1 Thesis Introduction
The worldwide energy demand is increasing. This is mostly due to industrialisation, globalisation,
and the economical bloom of upcoming markets like China and India. Over the next three decades,
world energy consumption is projected to increase by 56 percent. [1] To combat energy demand
growth, the integration of renewable energy and the promotion of distributed energy resources are
being looked at as possible solutions. On top of this, renewable power generation is predicted to
grow immensely as greenhouse gas emission regulations are implemented in numerous places
around the world. [2] As a result of the aforementioned points, power systems are beginning to
become more and more complex and stressed. [3] As a further result, it will become more difficult to
maintain stability in these more complex transmission networks.
Methods for measuring real-time voltage stability are currently being developed to be used in the
more complicated power transmission networks of the future. Synchrophasor measurement devices
[4] known as phasor measurement units (PMU’s) are a promising new endeavour which allow for the
real-time analysis of electrical power systems. These devices measure power system variables which
are time-synchronised to within a millisecond. [5] The use of PMU’s allows for the creation of large
scale protection schemes which are commonly referred to as “wide area measurement and
protection systems”. In the future, these devices are going to be used in conjunction with traditional
power system protection methods and will be instrumental in the protection and control of the
world’s increasingly complicated power transmission networks.
1.2 Thesis Objective
The objective of this thesis is to investigate the use of synchrophasors in analysing voltage stability
and detecting voltage collapse. To carry out the investigation, synchrophasor data will be retrieved
from a power system using MATPOWER. [6] The synchrophasor data will then be computed into
voltage stability indices in an attempt to give an indication of the voltage stability level of each load
bus in the power system as well as their proximity to voltage collapse. The synchrophasor data will
also be used to determine where system voltage collapse occurs. These results will be analysed and
conclusions will be drawn on their effectiveness.
The network being simulated is the IEEE 14-bus network. [7] It is assumed that voltage collapse
occurs, and thus, the network is deemed unstable, when the MATPOWER power flow algorithm does
not converge to a solution.
1.3 Thesis Organisation
This Thesis is organised into 7 main chapters. Chapter 1 (this chapter) is an introduction to the Thesis
which goes over the objective of the Thesis itself. Chapter 2 is a review of phasors, synchrophasors
and PMUs. Chapter 3 is a review of system stability. This chapter will discuss voltage stability, rotor
angle stability, frequency stability, voltage collapse, and a few real life voltage collapse incidents.

2
Chapter 4 is a discussion of methods of voltage stability analysis. This chapter goes over many
different voltage stability analysis methods and talks about their advantages and disadvantages.
Chapter 5 goes over the research methodology used in the simulations. Chapter 6 discusses the
results of the simulations. Chapter 7 is the conclusion to the Thesis which sums up its key findings.
3
2.0 Review of Phasors, Synchrophasors & PMU’s
2.1 Phasor Overview
A phasor is a complex number that represents a sinusoidal function that has a time-invariant
amplitude, angular frequency and initial phase.
A sinusoidal waveform is expressed by Equation 1 below;
𝑦(𝑡) = 𝐴𝑐𝑜𝑠(2𝜋𝑓𝑡 + 𝜃) = 𝐴𝑐𝑜𝑠(𝜔𝑡 + 𝜃)
Euler’s formula states that sinusoids can be represented as the sum of two complex functions;
𝐴𝑐𝑜𝑠(𝜔𝑡 + 𝜃) = 𝐴 ∗𝑒𝑖(𝜔𝑡+𝜃)+𝑒−𝑖(𝜔𝑡+𝜃)
2
Euler’s formula also states that sinusoids can be represented by the real part of one of the function;
𝐴𝑐𝑜𝑠(𝜔𝑡 + 𝜃) = 𝑅𝑒{𝐴 ∗ 𝑒𝑖(𝜔𝑡+𝜃)} = 𝑅𝑒{𝐴𝑒𝑖𝜃 ∗ 𝑒𝑖𝜔𝑡}
This can be represented in angle notation as
𝐴∠𝜃
Equations 3 and 4 are analytical representations of Equation 2. The term A represents the magnitude
of the sinusoidal wave, whilst the term 𝜃 represents the initial phase of the sinusoidal wave.
2.2 Synchrophasor and PMU Overview
The term synchrophasor is short for “synchronised phasor measurement”. Synchrophasor devices
allow for the real-time analysis of electrical power systems. Power system protection and control is
in turn improved as a result of the implementation of these devices.
At a fundamental level;
“Synchrophasors provide a means for comparing a phasor to an absolute time reference.” [8]
A device known as a phasor measurement unit (PMU) is what actually creates a synchrophasor. The
way a PMU works is outlined as follows;
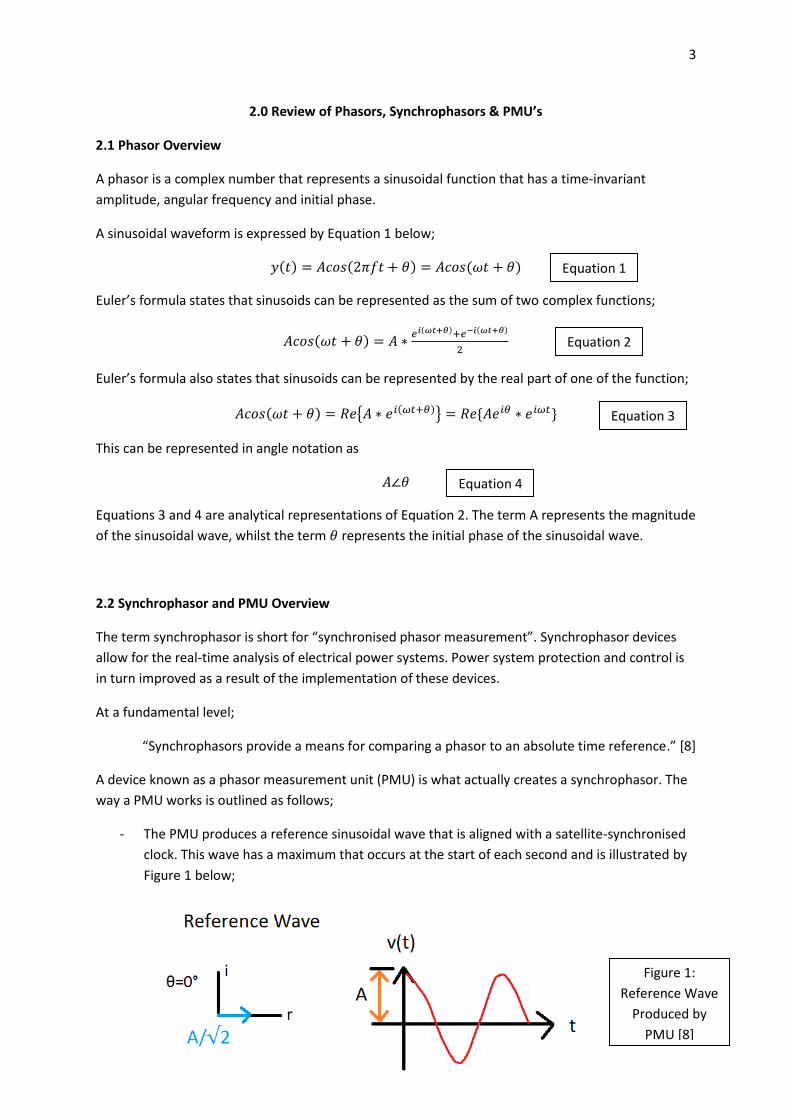
- The PMU produces a reference sinusoidal wave that is aligned with a satellite-synchronised
clock. This wave has a maximum that occurs at the start of each second and is illustrated by
Figure 1 below;
Equation 1
Equation 2
Equation 3
Equation 4
Figure 1:
Reference Wave
Produced by
PMU [8]
4
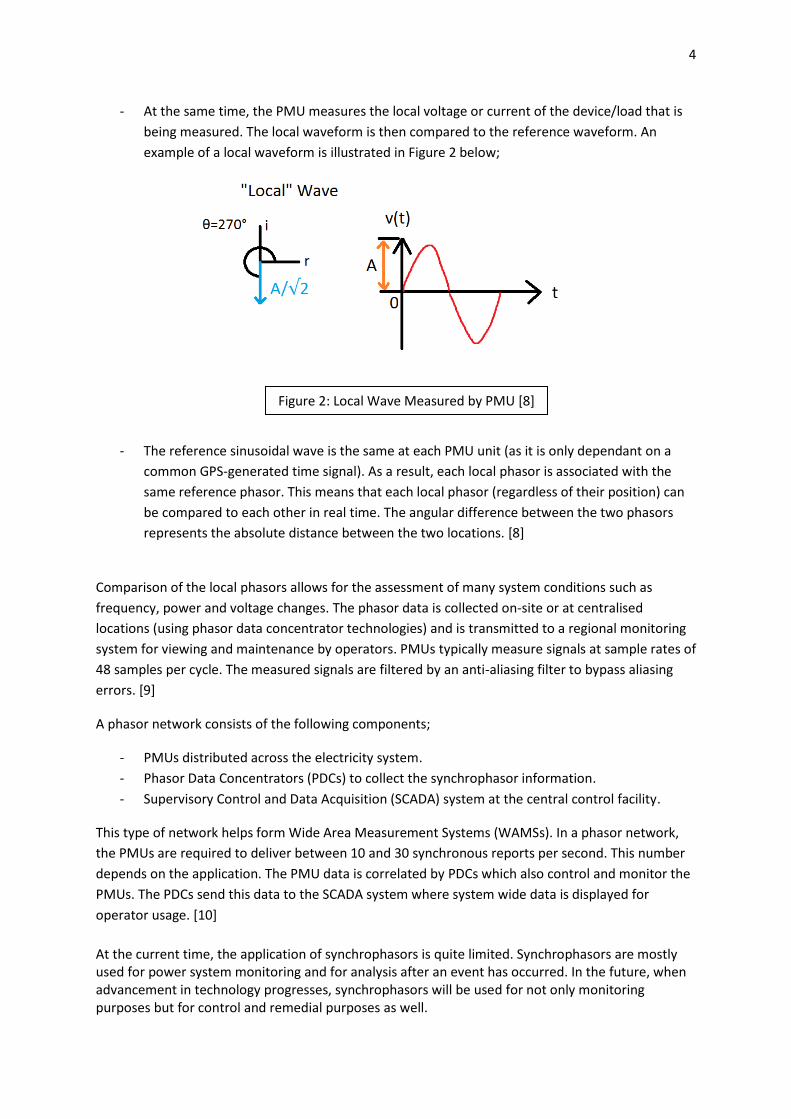
- At the same time, the PMU measures the local voltage or current of the device/load that is
being measured. The local waveform is then compared to the reference waveform. An
example of a local waveform is illustrated in Figure 2 below;
- The reference sinusoidal wave is the same at each PMU unit (as it is only dependant on a
common GPS-generated time signal). As a result, each local phasor is associated with the
same reference phasor. This means that each local phasor (regardless of their position) can
be compared to each other in real time. The angular difference between the two phasors
represents the absolute distance between the two locations. [8]
Comparison of the local phasors allows for the assessment of many system conditions such as
frequency, power and voltage changes. The phasor data is collected on-site or at centralised
locations (using phasor data concentrator technologies) and is transmitted to a regional monitoring
system for viewing and maintenance by operators. PMUs typically measure signals at sample rates of
48 samples per cycle. The measured signals are filtered by an anti-aliasing filter to bypass aliasing
errors. [9]
A phasor network consists of the following components;
- PMUs distributed across the electricity system.
- Phasor Data Concentrators (PDCs) to collect the synchrophasor information.
- Supervisory Control and Data Acquisition (SCADA) system at the central control facility.
This type of network helps form Wide Area Measurement Systems (WAMSs). In a phasor network,
the PMUs are required to deliver between 10 and 30 synchronous reports per second. This number
depends on the application. The PMU data is correlated by PDCs which also control and monitor the
PMUs. The PDCs send this data to the SCADA system where system wide data is displayed for
operator usage. [10]
At the current time, the application of synchrophasors is quite limited. Synchrophasors are mostly used for power system monitoring and for analysis after an event has occurred. In the future, when advancement in technology progresses, synchrophasors will be used for not only monitoring purposes but for control and remedial purposes as well.
Figure 2: Local Wave Measured by PMU [8]
5
3.0 Stability Review
3.1 Power System Stability
Since as early as the 1920s, power system stability has been viewed as an important problem for
secure system operation. [11] This importance is reinforced by the number of major blackouts
caused by power system instability over time.
Due to the evolution of power systems and the increasing growth and complexity of transmission
networks, there have emerged many different types of system instability. The three main types of
system instability, that is, those of which that provide the greatest concern to system stability, are
voltage stability, frequency stability and rotor angle stability. [12] The purpose of this section of the
Thesis is to review and clarify the different types of system stability so they can be understood
better.
The definition of power system stability is stated as follows: “Power system stability is the ability of
an electric power system, for a given initial operating condition, to regain a state of operating
equilibrium after being subjected to a physical disturbance, with most system variables bounded so
that practically the entire system remains intact.” [12]
Although the above definition is referring to the stability of a power system as a whole, the stability
of other components, such as a generator or group of generators is often of importance as well. For
example, the stability of a remote generator could become lost without the loss of the stability of
the main power system. [12] The same can be said about a load or group of loads.
Power systems exhibit a wide range of disturbances. In fact, disturbances to a power system may range from very small to significantly large. A small disturbance includes a load change in a power system, whilst a large disturbance may be a short circuit at a critical part of a power system. After being subjected to a disturbance, the stability of a power system depends on its initial operating condition and the nature of the disturbance itself. [12]
Prior to a disturbance, a power system is said to be operating in an equilibrium state. After a disturbance occurs but the system still remains stable, the power system will enter a new equilibrium state. A power system’s stability is governed by an equilibrium set. [12] This equilibrium set is a region that governs if a system will still remain stable or not after a disturbance is introduced due to the change in equilibrium state.

6
3.2 Rotor Angle Stability
The definition of rotor angle stability is as follows; “The ability of synchronous machines of an
interconnected power system to remain in synchronism after being subjected to a disturbance”. [12]
When a disturbance is introduced into a transmission network, generators can experience an
increase in angular motion. This causes these generators to become unsynchronised with other
generators in the system. When a generator is operating at steady-state, that is, when it is rotating
at a constant angular velocity, there exists an equilibrium between its input mechanical torque and
output electromagnetic torque. An introduced disturbance can throw out this equilibrium and this
causes the generator’s rotor to accelerate or deaccelerate. The ability of a generator to keep in
synchronisation with the other generators in a system after a disturbance refers to how well the
generator maintains the balance between its mechanical and electromagnetic torques.
As a synchronous machine’s rotor angle changes, its power output changes. The extent of this is determined by the machine’s power-angle relationship. Let us imagine that after a disturbance is introduced to a power system, one of the system’s generators speeds up, so that it is, in that instant, running faster than another generator. The faster generator will now have an angular position that is further ahead than the slower generator’s angular position. There is now an angular difference between the two generators. This angular difference causes a load shift from the slower machine to the faster machine. The extent of the load switch is governed by the faster generator’s power-angle relationship. In turn, the load shift then tends to decrease the angular separation between the generators. This is not always the case, though. If the disturbance causes the generators to have an angular difference that is beyond a certain limit, instability will result. This is because the system cannot absorb the energy corresponding to the rotor speed differences. [12]
3.3 Frequency Stability
Frequency stability is the ability of a power system to maintain steady frequency following a severe system upset resulting in a significant imbalance between generation and load. A transmission network’s frequency stability is determined by how well the system can restore the balance between generation and load. Frequency swings that can trip electrical devices such as relays are a type of frequency instability.
Large disturbances to a transmission network are the biggest causes of frequency instability. Conditions associated with frequency instability include inadequate system responses, poor control and protection equipment coordination and insufficient generation reserve. [12]
3.4 Voltage Stability
Voltage stability is “the ability of a power system to maintain steady voltages at all buses in the
system after being subjected to a disturbance from a given initial operating condition”. [12] It is the
power system’s ability to maintain equilibrium between load supply and load demand. Types of
voltage instability include the rise or fall of bus voltages, load loss in specific areas, and transmission
line tripping. Voltage instability can also cause generators to lose synchronism, and the loss of
generator synchronism can also cause drops in network bus voltages.
7
The two biggest causes of voltage stability are load restoration and reactive power flow.
Let us imagine that after a disturbance is introduced to a transmission network, the power
consumed by the loads drops significantly. The load power can be restored by various means
including motor slip adjustment, distribution voltage regulators, tap-changing transformers and
thermostats. [12] Restoring the load power causes a large increase in reactive power consumption,
and this in turn causes voltage reduction.
Reactive power is a problem because of the fact that a large voltage drop occurs when active and
reactive power flows through inductive reactances in a transmission network. Reactive power flow
can increase due to certain types of disturbances on the transmission network. To keep up with this
demand, the generators must put out more power. Doing this will increase the magnitude of the
voltage drops across the transmission network as dictated by Ohm’s Law. When reactive power
demand is increased to a level where the power resources can no longer generate this level of
reactive power, voltage stability can no longer be provided and voltage collapse occurs.
Voltage stability can be classified into the following types:
- Large-disturbance voltage stability;
- Small-disturbance voltage stability.
These types of stability can be further classified as being either short-term or long-term.
Large-disturbance voltage stability refers to how well a transmission system can maintain steady
voltages after large system disturbances occur. Large-system disturbances include system faults, loss
of generation and circuit contingencies. [12] The characteristics of the system, as well as the control
and protection schemes present in the transmission network, determine large-disturbance voltage
stability.
Small-disturbance voltage stability refers to how well a transmission system can maintain steady
voltages after small system disturbances occur. Small-system disturbances include incremental
changes in system load. [12] Load characteristics and capability of continuous and discrete controls
influence small-disturbance voltage stability.
Short-term voltage stability involves “the dynamics of fast acting load components such as induction
motors, electronically controlled loads, and HVDC converters”. [12] This type of voltage stability
involves time periods that are in the order of seconds long. Long-term voltage stability involves
“slower acting equipment such as tap-changing transformers, thermostatically controlled loads, and
generator current limiters.” [12] This type of voltage stability involves time periods that are in the
order of minutes long. When long-term instability occurs, the elements involved will try to restabilise
the system. If these elements are driven to a point where they are running outside of their operating
limits, further instability will result.
8
3.5 Voltage Collapse Overview
The term voltage collapse refers to the shutdown of a power system due to the inability to maintain
adequate voltage levels. [13] When operation is normal, voltage levels are maintained at steady
levels. When a change in load demand occurs, reactive resources are adjusted to compensate for
this. When a large disturbance causes a decrease in voltage levels across the transmission network,
corrective action is in place to restore the voltage levels within a matter of minutes. Examples of
such corrective action include generator excitation systems, automatic or manual tapping of
transformers, and the switching of static compensation devices. [13]
When the transmission system is subjected to an extreme disturbance, these corrective actions may
temporarily restore voltage levels before they fall again to very low levels. As voltage continues to
fall to even lower levels, circuit protection systems begin to become unstable and inoperable. This is
due to the direct effect of the low voltages, or angular instability which can occur at low voltages. In
today’s transmission systems, protective devices observe these abnormal conditions and trigger
circuit breakers to open and de-energise the transmission system itself. This whole process can occur
in a matter of seconds to minutes. [13]
The following are factors that largely contribute to voltage instability/collapse: [13]
- Generation and load gap is too large
- Under-load tap changer action during low voltage conditions
- Unfavourable load characteristics
- Poor coordination between various control and protective systems
- Excessive use of shunt capacitor compensation
3.6 Real Voltage Collapse Incidents
Real voltage collapse incidents can help to give greater insight into the importance of voltage
stability and the reasons why it occurs.
In July of 1979, a BC Hydro power plant in Canada had a voltage collapse incident. This was caused
when a 100MW load was lost along a tie-line connection. This caused an increase in active power
transfer. As a result of this, voltages along the tie-line began to fall. The connected load then
decreased due to this fall of voltage. The tie-line transmission was increased even more due to the
fact that active power production was not reduced. After about one minute, the voltage in the
middle of the line had fallen to approximately 0.5pu. The tie-line was tripped due to overcurrent at
one end and due to a distance relay at the other. [14]
On August 4th 1982, numerous blackouts occurred in Belgium. [14] This collapse was due to
transmission capacity problems with the associated power plants. In this instance, only a few plants
were being used for generation due to the fact that there were only low loads in the area. As a
result, the plants were operating close to their operating limits. The generator tripped due to a lack
of reactive power and multiple generators were field current limited. Eventually, more generators
started tripping. As a result of this, voltage levels in the transmission network dropped drastically
and eventually the system was de-energised by its relays. Thus, voltage collapse had occurred.
9
On July 23 1987, a voltage collapse incident occurred in Tokyo. This day was characterised by
abnormally hot weather. After around midday, the load pick-up rate was approximately 1% per
minute. [14] To combat this increase in load, all available shunt capacitors were used in the system.
Eventually, voltage levels fell to approximately 0.75pu and as a result the transmission network was
de-energised by protective relays. The cause of the rapid load pick-up rate was thought to have been
due to unfavourable load characteristics of air conditioners. [14]
On August 28th 2003, a transformer was taken out of service because it contained a wrong Buchholz
alarm. Whilst the transformer was being taken out of service, an incorrect relay setting tripped an
adjacent cable section. This led to the power outage of a limited area. [15]
On September 28th 2003, a huge blackout occurred in Italy. This blackout was initiated by a line trip
in Switzerland. Unfortunately, the line could not be reconnected as the phase angle difference was
too large. Approximately 20 minutes later, a second line tripped. This caused a fast trip-sequence
that caused all lines interconnecting to Italy to overload. As a result of the trip sequence, the
frequency in Italy ramped down by 2.5Hz for 2.5 minutes. This caused the whole country to lose
power. [15]
10
4.0 Discussion and Methods of Voltage Stability Analysis
4.1 Voltage Stability Analysis Introduction
In general, the analysis of voltage stability in a transmission system should look at the following key
points: [16]
- How close is the system to voltage instability or collapse?
- When does the voltage instability occur?
- Where are the vulnerable spots of the system?
- What are the key contributing factors?
- What areas are involved?
Voltage instability is a dynamic phenomenon that can last from seconds to multiple minutes. It is
closely related to the maximum loadability of a transmission system. Because of this, developing
methods of determining maximum loadability has always been a strong area of interest, and it is
becoming an increasingly more important issue. The last few decades have seen the development of
numerous voltage stability analysis methods.
This chapter will review many different methods of voltage stability analysis and look at the benefits
and problems associated with them. Before doing that it will briefly outline the difference between
dynamic and static analysis.
4.2 Definition of Dynamic and Static Analysis
In recent years there has been a lot of industry attention given to finding and strengthening methods
of voltage stability analysis. Voltage stability analysis is now included as part of routine planning and
operation studies by many utilities. [17]
There are two main types of voltage stability analysis methods;
- Dynamic analysis
- Static analysis
Dynamic analysis uses time-domain simulations to solve nonlinear system differential/algebraic
equations. [17] This method is more accurate in replicating the time responses of the power system.
This method, however, does have its problems. It is very computationally expensive and time
consuming, and does not readily provide information regarding the sensitivity or degree of
instability. [17]
Static analysis only involves the solutions of algebraic equations. It is much more computationally
efficient. This method is the most ideal for studies where voltage stability limits need to be
determined. [17]
11
4.3 Voltage Stability Indices
Voltage stability indices (VSIs) provide a scalar measurement that shows how far a power system’s
operating point is from the voltage stability limit. These measurements are needed due to the fact
that voltage magnitudes, by themselves, are not useful in doing this. VSIs can thus be used to
indicate when a power system is approaching voltage collapse.
Numerous VSIs have been developed to determine power system voltage stability margins. [18]
There are some VSIs which are power flow analysis based. These include Jacobian matrix singular
values and load flow feasibility. These VSIs are generally not suitable for online use because of the
fact that they “depend on traditional state estimators which usually take minutes to update the
snapshot of the power systems”. [18] Other VSIs are based on phasor measurements. Different
types of VSIs will be discussed in this chapter.
Phasor measurement based VSIs only use voltage and current phasor measurements to evaluate and
monitor system stability. Some phasor measurement based VSI algorithms require an input of
Thevenin equivalent parameters in order to be computed, whereas some can just use the phasor
measurements directly.
4.4 PV and QV Curves
The relationships between transmitted power, receiving end voltage, and reactive power injection
are of large importance in power system analysis. PV and QV curves are traditional forms of
displaying these relationships. To create PV curves, analysis processes are used which involve using a
series of power flow solutions for increasing transfers of MW and the monitoring of system voltages
that result. [19] This analysis method is good for modelling increasing loads in a power transmission
system. This analysis requires specific buses to be selected for monitoring and PV curves are plotted
for each of these buses. [19]
12
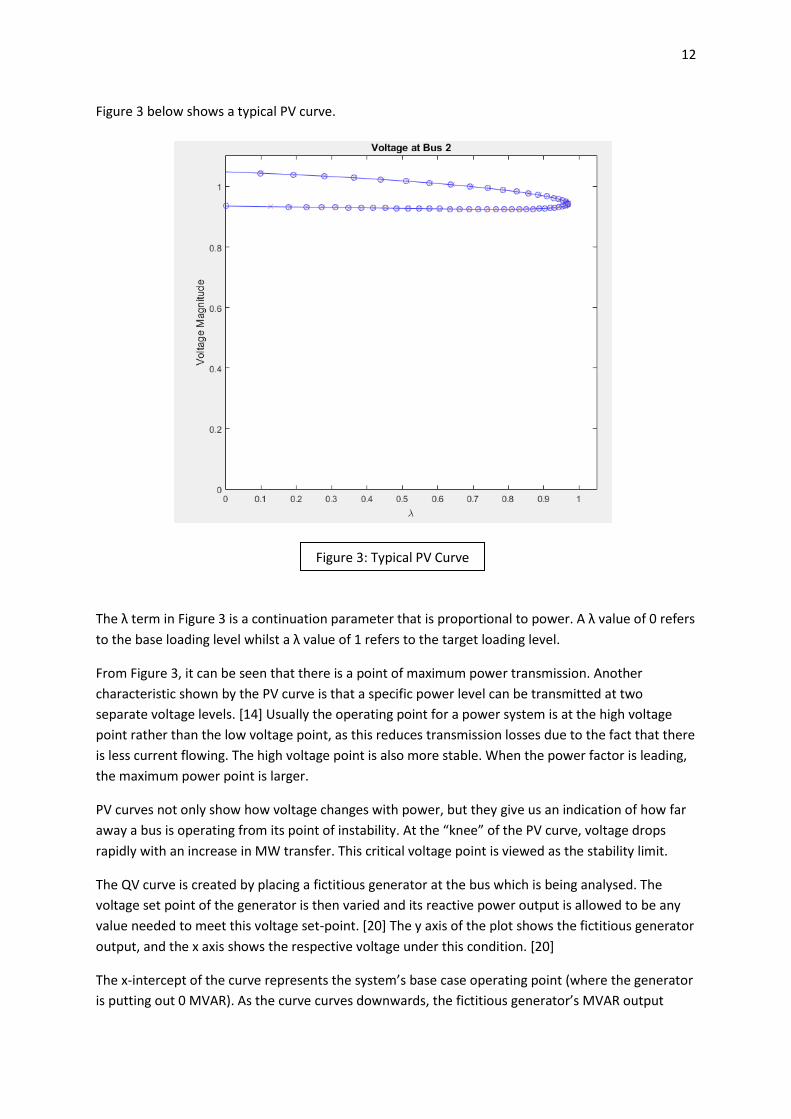
Figure 3 below shows a typical PV curve.
The λ term in Figure 3 is a continuation parameter that is proportional to power. A λ value of 0 refers
to the base loading level whilst a λ value of 1 refers to the target loading level.
From Figure 3, it can be seen that there is a point of maximum power transmission. Another
characteristic shown by the PV curve is that a specific power level can be transmitted at two
separate voltage levels. [14] Usually the operating point for a power system is at the high voltage
point rather than the low voltage point, as this reduces transmission losses due to the fact that there
is less current flowing. The high voltage point is also more stable. When the power factor is leading,
the maximum power point is larger.
PV curves not only show how voltage changes with power, but they give us an indication of how far
away a bus is operating from its point of instability. At the “knee” of the PV curve, voltage drops
rapidly with an increase in MW transfer. This critical voltage point is viewed as the stability limit.
The QV curve is created by placing a fictitious generator at the bus which is being analysed. The
voltage set point of the generator is then varied and its reactive power output is allowed to be any
value needed to meet this voltage set-point. [20] The y axis of the plot shows the fictitious generator
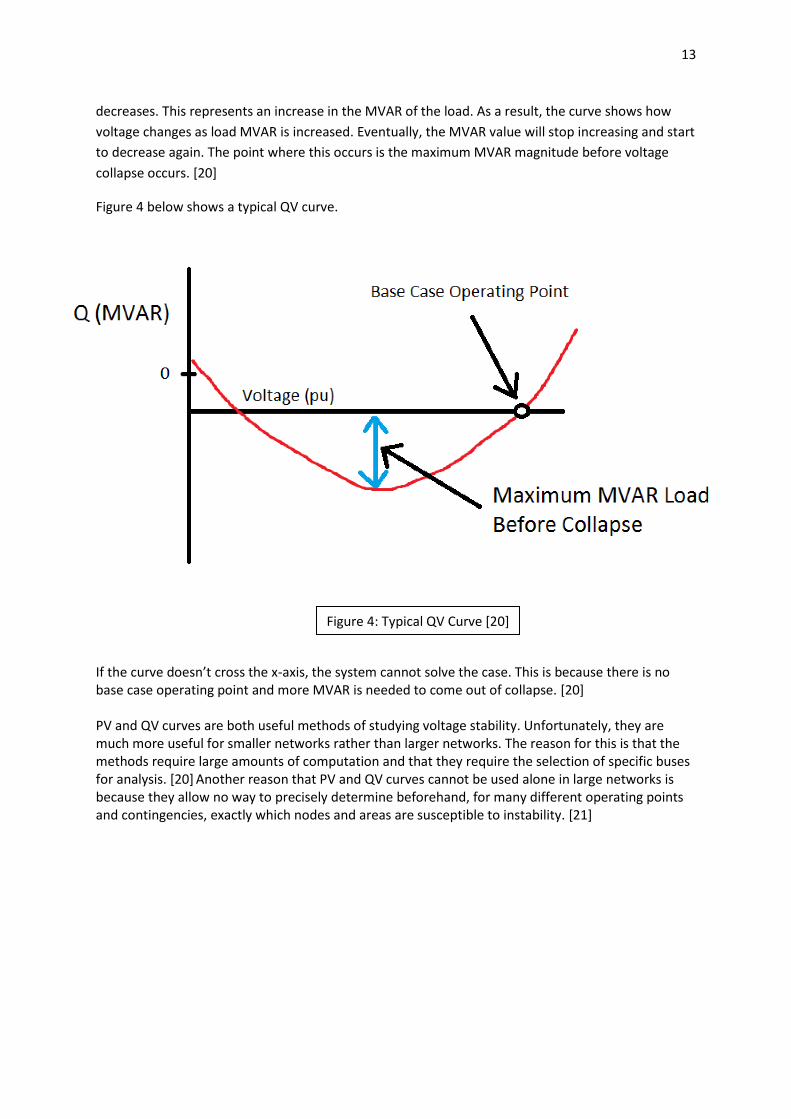
output, and the x axis shows the respective voltage under this condition. [20]
The x-intercept of the curve represents the system’s base case operating point (where the generator
is putting out 0 MVAR). As the curve curves downwards, the fictitious generator’s MVAR output
Figure 3: Typical PV Curve
13
decreases. This represents an increase in the MVAR of the load. As a result, the curve shows how
voltage changes as load MVAR is increased. Eventually, the MVAR value will stop increasing and start
to decrease again. The point where this occurs is the maximum MVAR magnitude before voltage
collapse occurs. [20]
Figure 4 below shows a typical QV curve.
If the curve doesn’t cross the x-axis, the system cannot solve the case. This is because there is no base case operating point and more MVAR is needed to come out of collapse. [20] PV and QV curves are both useful methods of studying voltage stability. Unfortunately, they are much more useful for smaller networks rather than larger networks. The reason for this is that the methods require large amounts of computation and that they require the selection of specific buses for analysis. [20] Another reason that PV and QV curves cannot be used alone in large networks is because they allow no way to precisely determine beforehand, for many different operating points and contingencies, exactly which nodes and areas are susceptible to instability. [21]
Figure 4: Typical QV Curve [20]

14
4.5 L-Index Sensitivity Methods
The L-index sensitivity method is used to find the buses of a transmission network which are most
prone to voltage instability. The method splits the Ybus matrix of the system into rows and columns of
generators and load buses.
Equations 5, 6, 7 and 8 below detail the method of constructing L-indices. [22]
[𝐼𝐺
𝐼𝐿] = (
𝑌𝐺𝐺 𝑌𝐺𝐿
𝑌𝐿𝐺 𝑌𝐿𝐿) [
𝑉𝐺
𝑉𝐿]
[𝑉𝐿
𝐼𝐺] = (
𝑍𝐿𝐿 𝐹𝐿𝐺
𝐾𝐺𝐿 𝑌𝐺𝐺) [
𝐼𝐿
𝑉𝐺]
𝐹𝐿𝐺 = −[𝑌𝐿𝐿]−1[𝑌𝐿𝐺]
𝐿𝑗 = |1 − ∑𝐹𝑗𝑖𝑉𝑖
𝑉𝑗
𝑖=𝑔
𝑖=1
|
where;
- VL and IL refer to the vector of voltages and currents of the load buses.
- VG and IG refer to the vector of voltages and currents of the generator buses.
- ZLL, FLG, KGL and YGG refer to sub-matrices of the hybrid matrix H.
- g refers to the number of generator buses in the system.
A L-index value closer to 0 indicates a larger voltage stability margin. The bus that has the highest L-
index value is the most critical bus.
The summation of the squares of the L indices of the individual buses provides an indicator of the
overall voltage stability of the system at different operating conditions. [22]
Many methods use L-indices as a way to analyse voltage stability. The following method details an
algorithm brought forward in the research paper “A New Technique to find the effect of Active
Power Loading on Voltage Stability and Algorithm to improve Voltage Stability of Radial and Meshed
Power Systems” [23] that allows for the observation of the effect of active power loading on voltage
stability:
1. Calculate the L-index of all the load buses.
Equation 5
Equation 6
Equation 7
Equation 8
15
2. Calculate the Active Power L-index Sensitivity Matrix. [22] The method for doing this is not
detailed in this report.
3. Choose a limit for the L-index and call it Llimit.
4. Find the buses which have an L-index that is more than Llimit and let these buses be [B2 B5 B7].
5. Find ΔLred. ΔLred is taken for the buses which are exceeding Llimit. ΔLred = [ΔL2 ΔL5 ΔL7].
6. Find the reduced Active Power L-index Sensitivity Matrix (Lrp). This matrix relates ΔLrp and
ΔPred where ΔPred = [P2 P5 P7].
7. ΔLred = ΔLrp* ΔPred.
8. Take ∑ΔPred as the objective function.
9. Perform optimisation, minimising objective function satisfying the constraints ΔLmin ≤ ΔL ≤
ΔLmax where:
ΔLmin = ΔLactual – ΔLlimit and ΔLmax = [1] - Lactual
10. The amount of reactive power to be reduced at each bus for increasing the voltage stability
is now shown.
This method has been applied to several Indian rural distribution networks which demonstrated
applicability of the proposed approach. [23] A disadvantage to this approach is that it is very
computationally intensive.
4.6 Modal Analysis Using the Reduced Jacobian Matrix
Modal analysis is an analysis technique that is used to determine the most vulnerable areas of a
power network in terms of voltage instability. It is used when selecting the best locations for
installing reactive compensation equipment as well as for determining the most effective actions to
take when voltage conditions need to be alleviated. [24] Modal analysis has the ability to predict
voltage collapse in transmission networks. [25]
Modal analysis in transmission networks involves the computation of the smallest Eigen values and
eigenvectors of the power system’s reduced Jacobian matrix [27] obtained from the load flow
solution [26]. [25] The computed Eigen values are associated with voltage and reactive power
variation and can be used to provide a relative measure of voltage stability. [25] The weakest nodes
and buses in the system can also be found by analysing the participation factor associated with these
Eigen values. [25]
The issue with modal analysis, however, is that its results are only valid for incremental changes; it
has a powerful ability to provide information on system trends but lacks the ability to estimate the
actual numerical values of system variables following changes. [24]
The research paper “Voltage Stability Evaluation Using Modal Analysis” by Telang and Khampariya
[21] outlines a method for evaluating voltage stability using modal analysis as quoted below:
- The injected power in buses can be represented by using the following linear system model
(derived from Newton Raphson power flow);

16
[∆𝑃∆𝑄
] = [𝐽𝑃𝜃 𝐽𝑃𝑉
𝐽𝑄𝜃 𝐽𝑄𝑉] [
∆𝜃∆𝑉
]
where:
∆P= Incremental change in bus real power
∆Q = Incremental change in bus reactive power
∆θ = Incremental change in bus voltage angle
∆V = Incremental change in bus voltage
- When the power is kept constant the equation becomes;
[0
∆𝑄] = [
𝐽𝑃𝜃 𝐽𝑃𝑉
𝐽𝑄𝜃 𝐽𝑄𝑉] [
∆𝜃∆𝑉
]
- The Reduced Jacobian Matrix Jr is used to analyse the eigenvalues and eigenvectors of the
power system. The relation between Jr, ∆Q and ∆V is shown by:
∆𝑄 = 𝐽𝑟∆𝑉
- The reduced Jacobian Matrix Jr can be found by solving the following equation:
𝐽𝑟 = [𝐽𝑄𝑉 − (𝐽𝑄𝜃𝐽𝑃𝜃)−1
𝐽𝑃𝑉]
𝐽 = ξΛη ⇔ J−= ξΛ − η
- Substituting Equation 11 with Equation 12 gives us the following equation:
∆𝑉 = ξΛ−1η∆𝑄 𝑂𝑅 ∆𝑉 = ∑ξii
ηi𝑖 ∆𝑄
where i is the ith eigenvalue,
ξi is the ith column eigenvector
ηi is the ith row left eigenvector
- The ith modal reactive power variation is therefore
∆𝑄𝑚𝑖 = 𝑘𝑖ξi
where 𝑘𝑖 is a normalisation factor such that
𝑘𝑖2 ∑ ξji
2 = 1
The ith modal variation can be written
Equation 9
Equation 10
Equation 11
Equation 12
Equation 13
Equation 14
Equation 15
Equation 16
17
∆𝑉𝑚𝑖 =1
i∆𝑄𝑚𝑖
- The voltage stability can be defined by the mode of the eigenvalues. The minimum
eigenvalue in a power system is the global VSI value. A larger eigenvalue will give smaller
changes in the voltages when small disturbances happen. A system is stable when the
eigenvalue of Jr is positive. The limit is reached when one of the eigenvalues reach zero. If
one of the eigenvalues is negative the system is unstable. [21]
- The left and right eigenvectors corresponding to the critical modes in the system can provide
information concerning the mechanism of voltage stability. [21] The bus participation of the
bus can be defined as:
𝑃𝑘𝑖 = ξkiηki
- Bus participation factors show the voltage stability of nodes in the power system. Bus
participation factors are shown in a matrix form called the participation matrix. The row of
the matrix indicates the bus number and the matrix column indicates the system mode. The
bigger the value of the bus participation factor indicates the more affecting the bus is to the
power system. [21]
4.7 The Voltage Stability Index (VSI)
The Voltage Stability Index (VSI) is an index that is based on direct measurements (such as bus
voltages and sensitivity factors). It is a simpler approach which is currently being used in the industry
as a tool in voltage stability analysis. The VSI looked at here was introduced in the research paper
“Synchrophasor-Based Real-Time Voltage Stability Index” [18] by Yanfeng Gong and Noel Schulz of
Mississippi State University.
The way the VSI of a bus is calculated is demonstrated by the following:
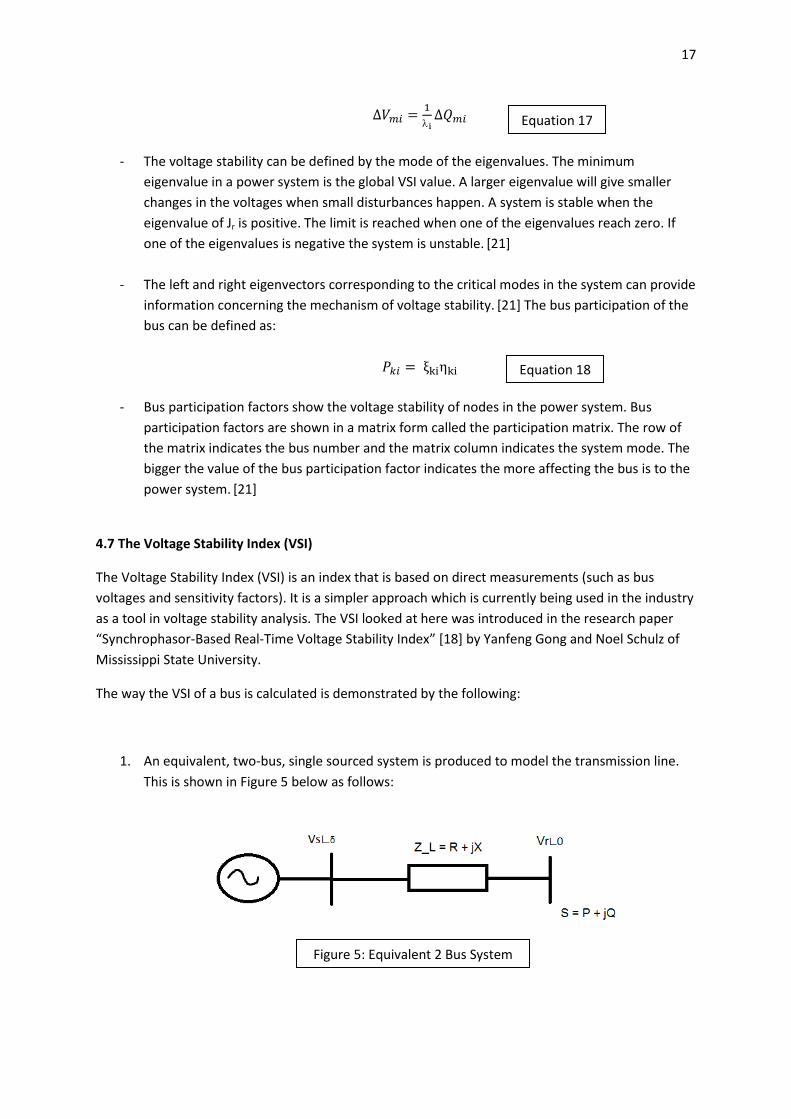
1. An equivalent, two-bus, single sourced system is produced to model the transmission line.
This is shown in Figure 5 below as follows:
Equation 17
Equation 18
Figure 5: Equivalent 2 Bus System
18
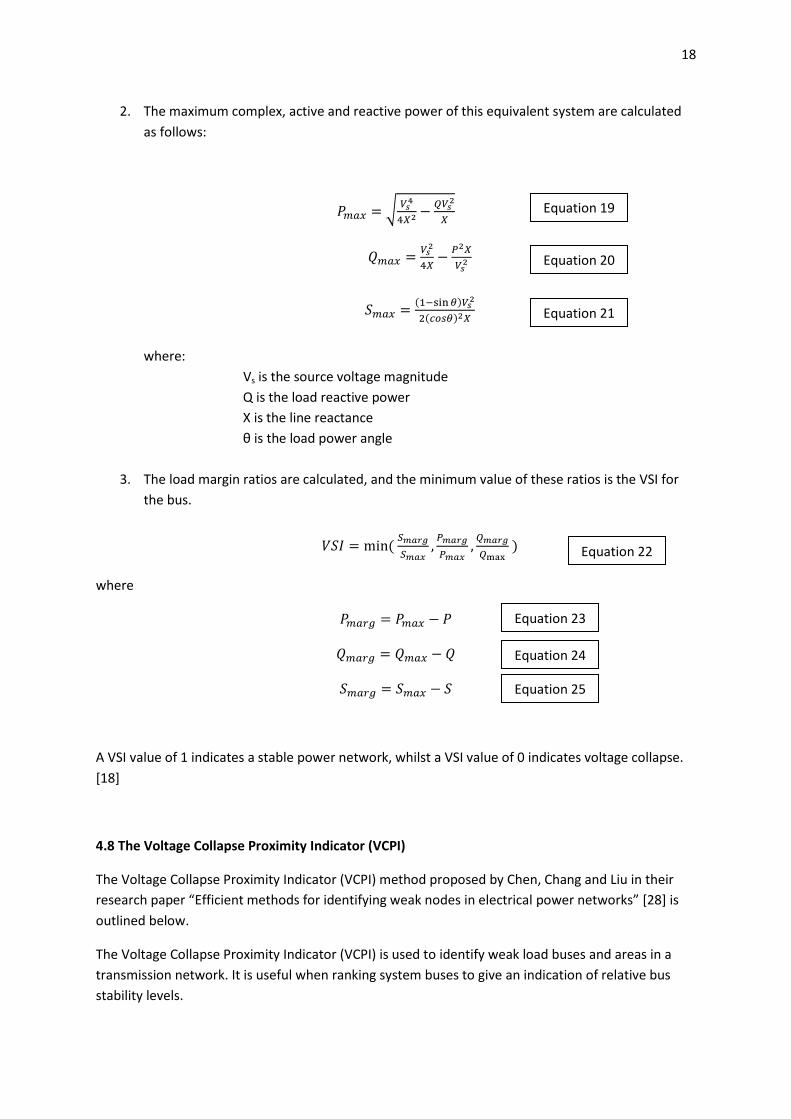
2. The maximum complex, active and reactive power of this equivalent system are calculated
as follows:
𝑃𝑚𝑎𝑥 = √ 𝑉𝑠4
4𝑋2 −𝑄𝑉𝑠
2
𝑋
𝑄𝑚𝑎𝑥 =𝑉𝑠
2
4𝑋−
𝑃2𝑋
𝑉𝑠2
𝑆𝑚𝑎𝑥 =(1−sin 𝜃)𝑉𝑠
2
2(𝑐𝑜𝑠𝜃)2𝑋
where:
Vs is the source voltage magnitude
Q is the load reactive power
X is the line reactance
θ is the load power angle
3. The load margin ratios are calculated, and the minimum value of these ratios is the VSI for
the bus.
𝑉𝑆𝐼 = min ( 𝑆𝑚𝑎𝑟𝑔
𝑆𝑚𝑎𝑥,
𝑃𝑚𝑎𝑟𝑔
𝑃𝑚𝑎𝑥,
𝑄𝑚𝑎𝑟𝑔
𝑄max )
where
𝑃𝑚𝑎𝑟𝑔 = 𝑃𝑚𝑎𝑥 − 𝑃
𝑄𝑚𝑎𝑟𝑔 = 𝑄𝑚𝑎𝑥 − 𝑄
𝑆𝑚𝑎𝑟𝑔 = 𝑆𝑚𝑎𝑥 − 𝑆
A VSI value of 1 indicates a stable power network, whilst a VSI value of 0 indicates voltage collapse.
[18]
4.8 The Voltage Collapse Proximity Indicator (VCPI)
The Voltage Collapse Proximity Indicator (VCPI) method proposed by Chen, Chang and Liu in their
research paper “Efficient methods for identifying weak nodes in electrical power networks” [28] is
outlined below.
The Voltage Collapse Proximity Indicator (VCPI) is used to identify weak load buses and areas in a
transmission network. It is useful when ranking system buses to give an indication of relative bus
stability levels.
Equation 19
Equation 20
Equation 21
Equation 22
Equation 23
Equation 24
Equation 25
19
The VCPI for each load bus, considering reactive power only, is defined as:
𝑉𝐶𝑃𝐼 =∑ ∆𝑄𝐺
𝑗𝑗𝜀∅𝐺
∆𝑄𝑖 , 𝑖 ∈ ∅𝐿
where:
∅G represents the set of generator buses
∅L represents the set of load buses
∆QGj represents a small increase in reactive generation j
∆Qi represents a small increase in load reactive power
The VCPI is based on the reactive power compensation of a power system. A small increase in a load
buses’ reactive power will cause other generator buses to generate more reactive power to
compensate for this. Each load bus will need varying amounts of reactive power compensation. The
weakest load bus will be the load bus that needs the most reactive power to maintain its voltage.
The weakest load bus will have the largest VCPI.
For a system that is voltage stable, all VCPI values will have a value greater than but close to unity.
For a system that is close to voltage collapse, at least one VCPI will become large, approaching
infinity at the point of collapse. [28] The weakest node in the network will have the maximum value
of VCPI. The VCPI is only valid for loads with an appreciable reactive component Qi. This is because it
gives a misleading answer for unity power factor loads. [28]
4.9 Relative Voltage Change Method / Voltage Change Index (VCI)
The Relative Voltage Change Method is introduced by Obadina and Berg in their paper titled
“Identifying electrically weak and strong segments of a power system from a voltage stability
viewpoint”. [29] This method allows for the ranking of buses in terms of ‘weakness’.
The method requires obtaining the critical loading condition, that is, the point where at least one
bus in the transmission network falls below its stable operating voltage range which, for general
purposes, is defined as 0.9 to 1.1 per unit. To find this point, the load factor of the system is reached
until the critical loading condition occurs.
The method involves the creation of the following voltage index at each load bus:
𝑉𝐶𝐼 =𝑉𝑖𝑛𝑖𝑡−𝑉𝑙𝑖𝑚𝑖𝑡
𝑉𝑙𝑖𝑚𝑖𝑡
This is known as the voltage change index (VCI), where vinit and vlimit are the voltage magnitudes at a
bus at the initial operating state and the voltage stability limit respectively.
Equation 26
Equation 27
20
The weak or critical bus in the network is the bus that is the most electrically remote from the point
of constant or controllable voltage. [29] It is anticipated that for a specified operating regime, going
from an initial operating point to the voltage stability limit, the weakest bus would experience the
largest voltage change, that is, have the largest VCI index. [29]
4.10 Continuation Power Flow (CPF)
Continuation methods or branch tracing methods are used to trace a curve, given an initial point on
the curve. These are also called predictor-corrector methods since they involve the prediction of the
next solution point and correcting the prediction to get the next point on the curve. [6]
The following continuation power flow method is built into the power flow simulator tool
MATPOWER [6]. The following information is taken from the MATPOWER User Manual [6].
Let us consider a system of n nonlinear equations 𝑔(𝑥) = 0, 𝑥 ∈ 𝑅𝑛
By adding a continuation parameter λ and one more equation to the system, x can be traced by
varying λ. The resulting system f(x, λ) = 0 has n + 1 dimensions. The additional equation is a
parametrised equation which identifies the location of the current solution with respect to the
previous or next solution. [6] This above technique is referred to as a Lagrange Multiplier.
The continuation process can be diagrammatically shown by the following;
(𝑥𝑗, λj) →→ 𝑃𝑟𝑒𝑑𝑖𝑐𝑡𝑜𝑟 →→ (x̂j+1, λ̂j+1) →→ 𝐶𝑜𝑟𝑟𝑒𝑐𝑡𝑜𝑟 →→ (𝑥𝑗+1, λj+1)
where (𝑥𝑗 , 𝜆𝑗) represents the current solution, (𝑥𝑗+1, �̂�𝑗+1) is the predicted solution, and
(𝑥𝑗+1, 𝜆𝑗+1) is the next solution on the curve.
Continuation power flow is a stability analysis tool that employs continuation methods in power
systems to determine steady state stability limits. The limit is determined from a nose curve where
the nose represents the maximum power transfer that the system can handle given a power transfer
schedule. [6] Continuation power flow solvers can be used to plot PV charts and prediction-
correction trajectories.
To determine the steady state loading limit, the basic power flow equations
𝑔(𝑥) = [𝑃(𝑥) − 𝑃𝑖𝑛𝑗
𝑄(𝑥) − 𝑄𝑖𝑛𝑗] = 0
are restructured as
𝑓(𝑥, 𝜆) = 𝑔(𝑥) − 𝜆𝑏 = 0
Equation 29
Equation 30
Equation 28
21
where 𝑥 ≡ (θ, Vm) and b is a vector of power transfer given by
𝑏 = [𝑃𝑡𝑎𝑟𝑔𝑒𝑡
𝑖𝑛𝑗− 𝑃𝑏𝑎𝑠𝑒
𝑖𝑛𝑗
𝑄𝑡𝑎𝑟𝑔𝑒𝑡𝑖𝑛𝑗
− 𝑄𝑏𝑎𝑠𝑒𝑖𝑛𝑗
]
The effects of the variation of loading or generation can be investigated using the continuation
method by composing the b vector appropriately. [6]
4.11 New Voltage Stability Index (NVSI)
The New Voltage Stability Index (NVSI) is proposed by R. Kanimozhi and K. Selvi in their research
paper titled “A Novel Line Stability Index for Voltage Stability Analysis and Contingency Ranking in
Power System Using Fuzzy Based Load Flow”. [30]
The NVSI is defined by the following equation;
𝑁𝑉𝑆𝐼𝑖𝑗 =2𝑋√𝑃𝑗
2+𝑄𝑗2
2𝑄𝑗𝑋−𝑉𝑖2
where NVSIij = New Voltage Stability Index for transmission line connecting bus i to bus j
X = Line reactance
Pj = Real power at the receiving end
Qj = Reactive power at the receiving end
Vi = Sending end voltage
The index originates from the equation of a two bus network, and neglects transmission line
resistance. For the system to maintain stability, all transmission line NVSI values must be less than
1.00. [30] The index can be used to indicate a system’s proximity to voltage collapse, and to rank
transmission branches in terms of strength.
Equation 31
Equation 32
22
5.0 Research Methodology
5.1 Research Methodology Introduction
The aim of the research carried out for this report was to investigate the use of synchrophasors in
analysing voltage stability and detecting voltage collapse.
The voltage stability analysis indices / methods chosen to incorporate into the simulations are listed
as follows:
- The Voltage Change Index (VCI)
- The Voltage Collapse Proximity Indicator (VCPI)
- Continuation Power Flow (CPF)
- The New Voltage Stability Index (NVSI)
The simulation software used in the research was MATPOWER [6], a stand-alone package of MATLAB
M-files which is used for solving power flow and optimal power flow problems. The tabulation
software used in my research was Microsoft Excel 2010.
This chapter will give a clear step-by-step procedure outlining the methodology of my simulations, as
well as give a discussion on MATPOWER.
5.2 MATPOWER Overview
This section gives a basic description of MATPOWER. Most information shown here is taken directly
from the MATPOWER User Manual.
MATPOWER is a third party stand-alone package of MATLAB M-files which is used for solving power
flow and optimal power flow (OPF) problems. It utilizes an extensible architecture that allows
the user to easily add new variables, constraints and costs to the standard OPF problem
formulation while preserving the structure needed to use pre-compiled solvers. [31] The software
design has the advantage of minimizing the coupling between variables, constraints and costs,
making it possible, for example, to add variables to an existing model without having to
explicitly modify existing constraints or costs to accommodate them. [31] Simply put, MATLAB is
used to provide high performance with code that is simple to modify and understand.
As mentioned before, MATPOWER’s primary functionality is to solve power flow and optimal power
flow problems. It does this via 3 steps:
- Preparing the input data defining all of the relevant system parameters [6]
- Invoking the function to run the simulation [6]
- Viewing and accessing the results that are printed to the screen and/or saved in output data
structures or files [6]
MATPOWER allows for the modification of real and reactive power demand. The following MATLAB
prompt is entered to load the IEEE 30-bus system, increase its real power demand at bus 2 to
30MW, and then run an AC optimal power flow with default options.
23
>> define_constants;
>> mpc = loadcase(‘case30’);
>> mpc.bus(2, PD) = 30;
>> runopf(mpc);
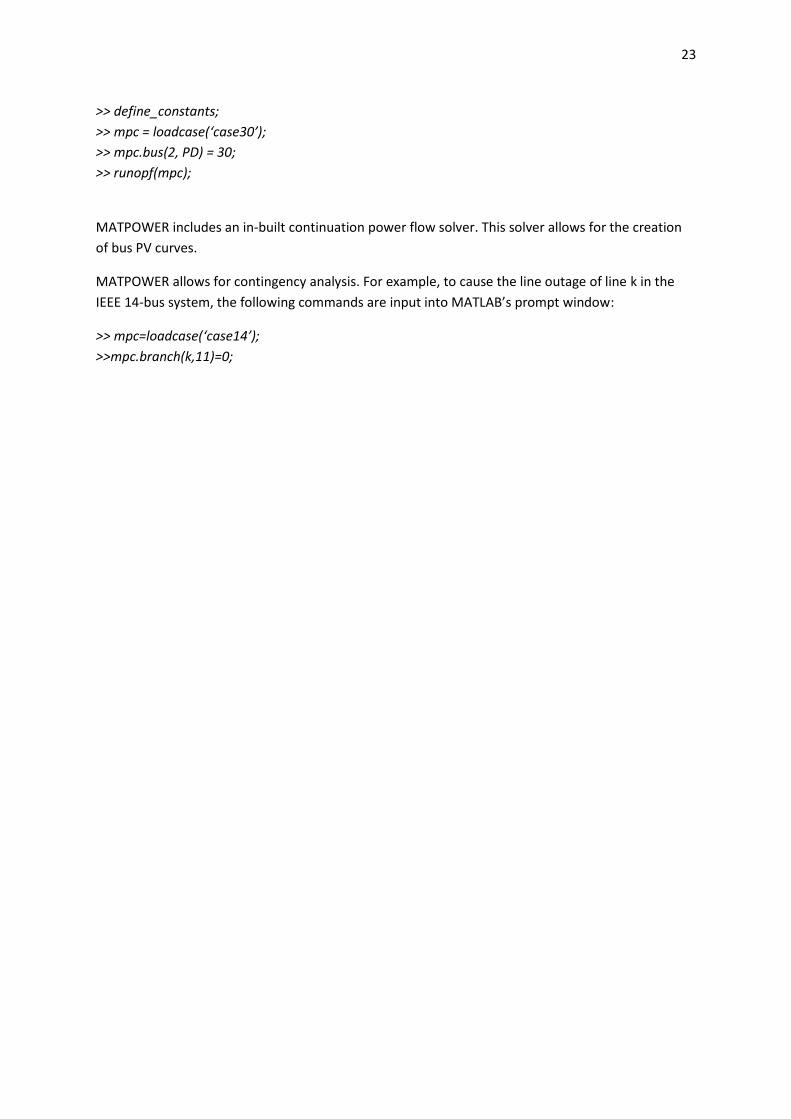
MATPOWER includes an in-built continuation power flow solver. This solver allows for the creation
of bus PV curves.
MATPOWER allows for contingency analysis. For example, to cause the line outage of line k in the
IEEE 14-bus system, the following commands are input into MATLAB’s prompt window:
>> mpc=loadcase(‘case14’);
>>mpc.branch(k,11)=0;
24
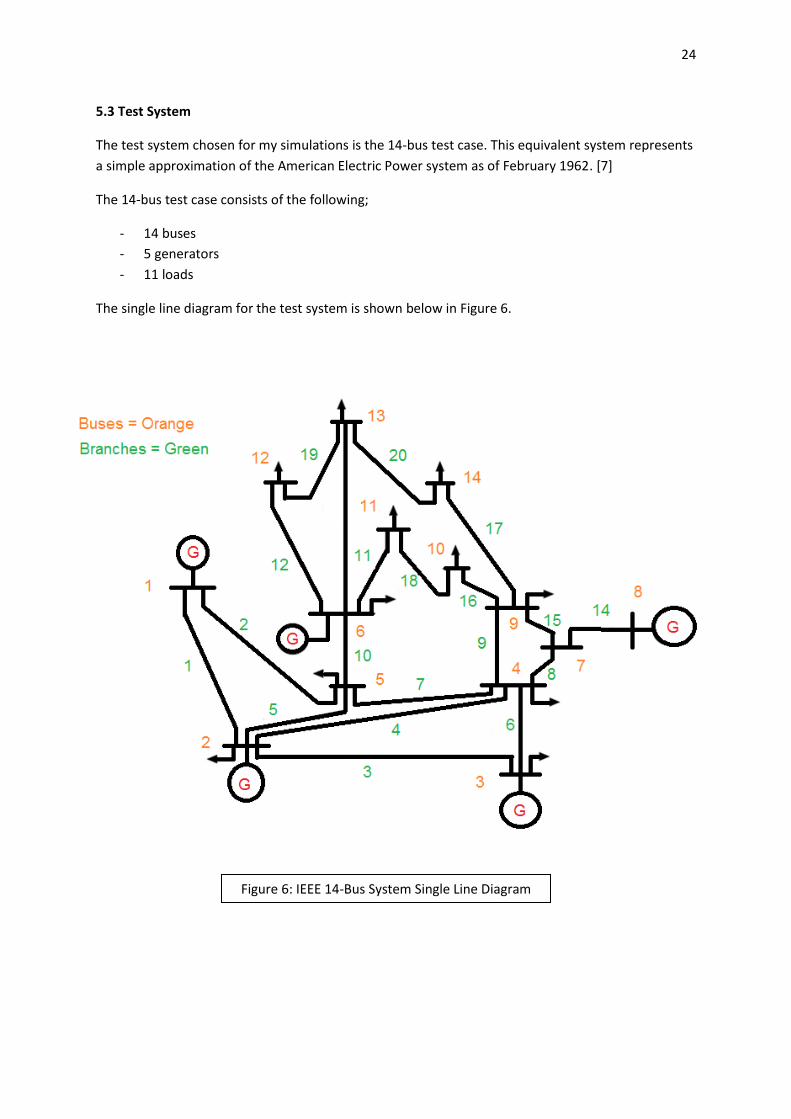
5.3 Test System
The test system chosen for my simulations is the 14-bus test case. This equivalent system represents
a simple approximation of the American Electric Power system as of February 1962. [7]
The 14-bus test case consists of the following;
- 14 buses
- 5 generators
- 11 loads
The single line diagram for the test system is shown below in Figure 6.
Figure 6: IEEE 14-Bus System Single Line Diagram
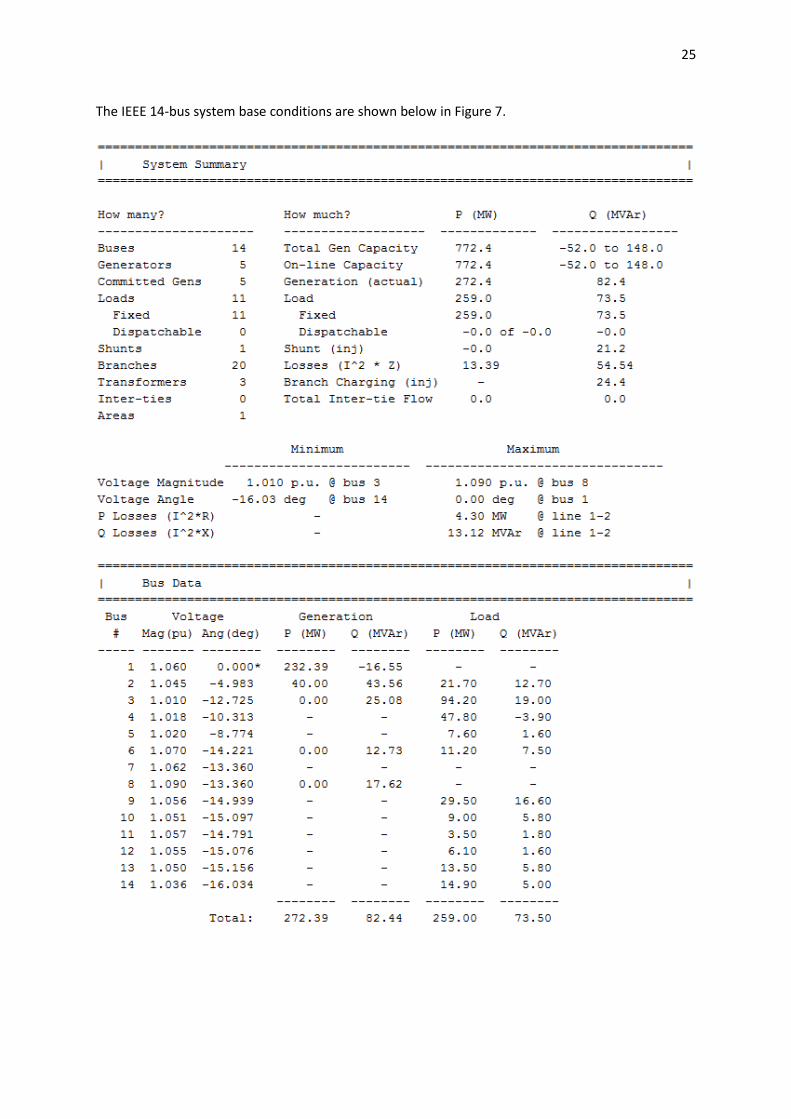
25
The IEEE 14-bus system base conditions are shown below in Figure 7.
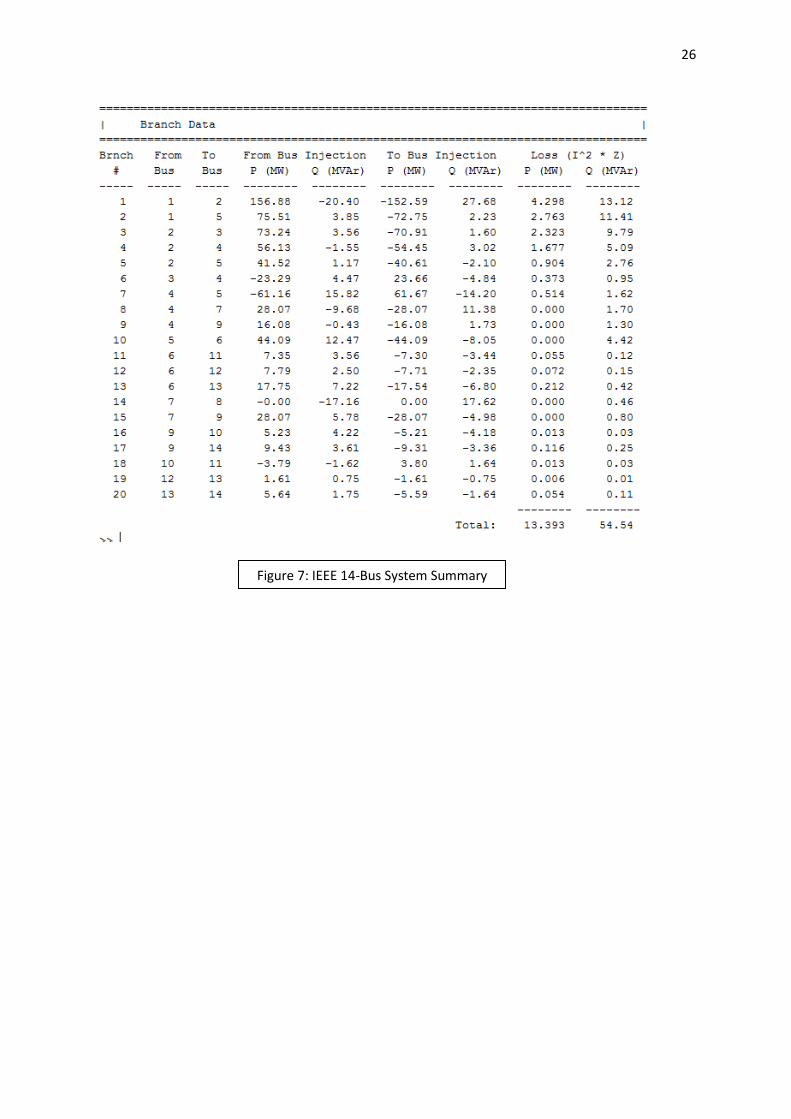
26
Figure 7: IEEE 14-Bus System Summary
27
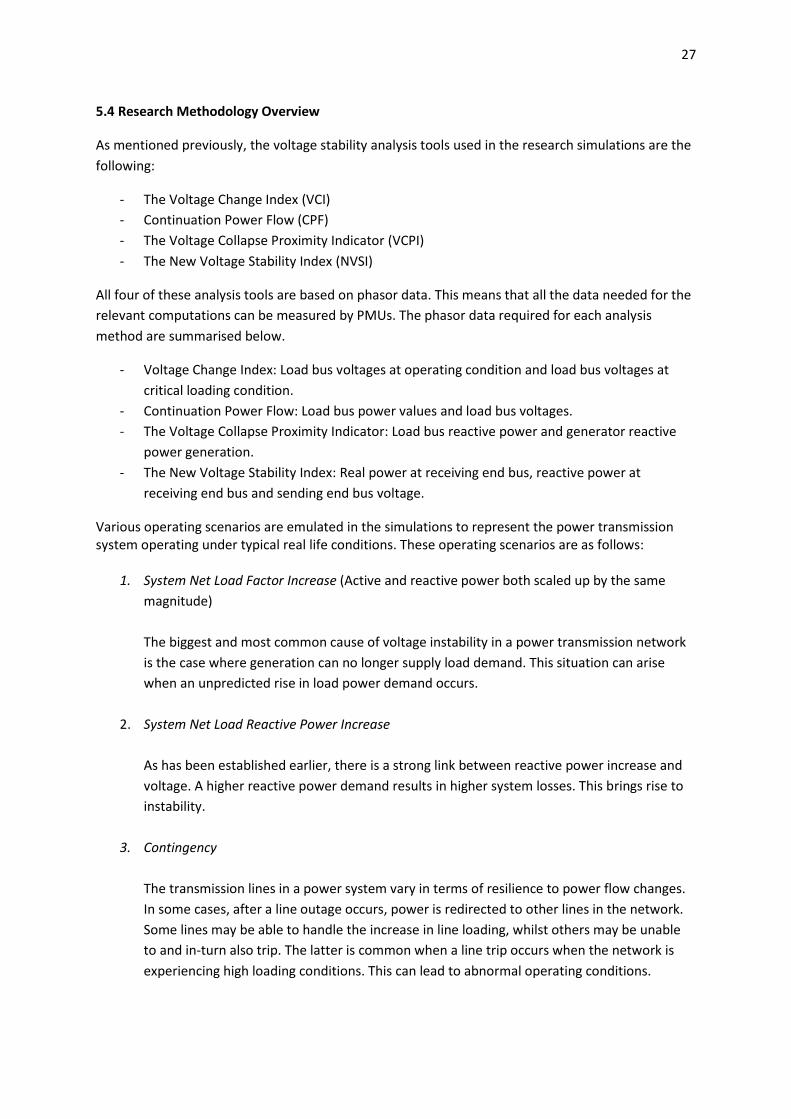
5.4 Research Methodology Overview
As mentioned previously, the voltage stability analysis tools used in the research simulations are the
following:
- The Voltage Change Index (VCI)
- Continuation Power Flow (CPF)
- The Voltage Collapse Proximity Indicator (VCPI)
- The New Voltage Stability Index (NVSI)
All four of these analysis tools are based on phasor data. This means that all the data needed for the
relevant computations can be measured by PMUs. The phasor data required for each analysis
method are summarised below.
- Voltage Change Index: Load bus voltages at operating condition and load bus voltages at
critical loading condition.
- Continuation Power Flow: Load bus power values and load bus voltages.
- The Voltage Collapse Proximity Indicator: Load bus reactive power and generator reactive
power generation.
- The New Voltage Stability Index: Real power at receiving end bus, reactive power at
receiving end bus and sending end bus voltage.
Various operating scenarios are emulated in the simulations to represent the power transmission system operating under typical real life conditions. These operating scenarios are as follows:
1. System Net Load Factor Increase (Active and reactive power both scaled up by the same
magnitude)
The biggest and most common cause of voltage instability in a power transmission network
is the case where generation can no longer supply load demand. This situation can arise
when an unpredicted rise in load power demand occurs.
2. System Net Load Reactive Power Increase
As has been established earlier, there is a strong link between reactive power increase and
voltage. A higher reactive power demand results in higher system losses. This brings rise to
instability.
3. Contingency
The transmission lines in a power system vary in terms of resilience to power flow changes.
In some cases, after a line outage occurs, power is redirected to other lines in the network.
Some lines may be able to handle the increase in line loading, whilst others may be unable
to and in-turn also trip. The latter is common when a line trip occurs when the network is
experiencing high loading conditions. This can lead to abnormal operating conditions.

28
5.5 Methodology for Computing VCIs
The VCI for each load bus will be calculated under a variety of different system conditions. This is
done to show how the weakest bus in the network can change under different operating cases. The
operating cases being analysed are listed as follows:
- Base Case
- Line 4 Outage
- Line 11 Outage
- Line 17 Outage
Initially, the per-unit load bus voltages for each operating case are recorded. For every operating
case, the load factor of every load bus in the system will be equally increased in constant increments
to find each system’s critical loading condition. The critical loading condition occurs when at least
one load bus in the system has a per-unit voltage outside the range of 1.1 and 0.9. The per-unit load
bus voltages will be recorded at each critical loading condition. The VCI values will then be calculated
from the obtained data and the buses will be ranked from ‘strongest’ to ‘weakest’ for each operating
case.
5.6 Methodology for Continuation Power Flow Analysis
The in-built MATPOWER continuation power flow solver will be used to create a PV curve for each
load bus. The PV curve will show the effect that increasing the active power loading of the bus has
on the bus voltage. The PV curve will then be used to obtain the critical active power and voltage
values for each load bus (not including the loads at buses 1, 2, 3, 6, 7 and 8 as only pure load buses
can be considered).
The continuation power flow solver will then be used to gather the critical power and voltage data
for each load bus under the line 4 removed, line 11 removed and line 17 removed conditions.
5.7 Methodology for Computing VCPIs
Firstly, the voltage collapse point of the system needs to be found by increasing the system net load factor. The voltage collapse point for the system will be when MATPOWER’s Newton Raphson power flow method does not converge. The critical loading condition must also be determined by increasing the net load factor of the system (this has already been found from the VCI simulations). At the initial operating condition, the immediate post-voltage collapse operating condition, the critical loading operating condition, and incremented load factor operating conditions in between these, the following procedure must be followed:
- Run the load flow to obtain the reactive power generation for each generation bus in the
system.
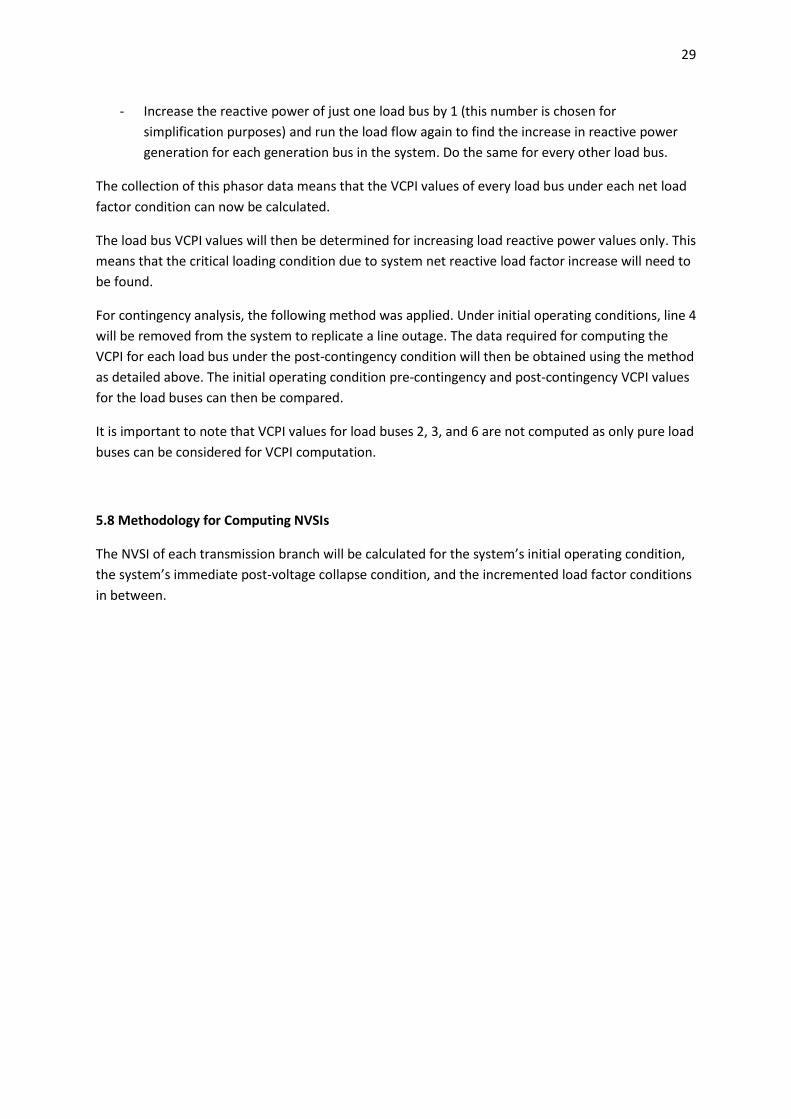
29
- Increase the reactive power of just one load bus by 1 (this number is chosen for
simplification purposes) and run the load flow again to find the increase in reactive power
generation for each generation bus in the system. Do the same for every other load bus.
The collection of this phasor data means that the VCPI values of every load bus under each net load
factor condition can now be calculated.
The load bus VCPI values will then be determined for increasing load reactive power values only. This
means that the critical loading condition due to system net reactive load factor increase will need to
be found.
For contingency analysis, the following method was applied. Under initial operating conditions, line 4
will be removed from the system to replicate a line outage. The data required for computing the
VCPI for each load bus under the post-contingency condition will then be obtained using the method
as detailed above. The initial operating condition pre-contingency and post-contingency VCPI values
for the load buses can then be compared.
It is important to note that VCPI values for load buses 2, 3, and 6 are not computed as only pure load
buses can be considered for VCPI computation.
5.8 Methodology for Computing NVSIs
The NVSI of each transmission branch will be calculated for the system’s initial operating condition,
the system’s immediate post-voltage collapse condition, and the incremented load factor conditions
in between.

30
6.0 Results and Discussion
6.1 Voltage Change Index Analysis Results
The critical loading conditions for each operating condition are documented in Table 1 below.
Operating Condition
Critical Load Factor
Base Case 2.8
Line 4 Removed 2.5
Line 11 Removed 2.2
Line 17 Removed 2.0
The load bus VCI values for each operating condition are tabulated in Table 2 below.
Base Case
Line 4 Removed
Line 11 Removed
Line 17 Removed
Bus No. VCI VCI VCI VCI
1 0.0000 0.0000 0.0000 0.0000
2 0.0000 0.0000 0.0000 0.0000
3 0.0000 0.0000 0.0000 0.0000
4 0.0911 0.1103 0.0550 0.0366
5 0.0921 0.1122 0.0505 0.0376
6 0.0000 0.0000 0.0000 0.0000
7 0.0793 0.0787 0.0622 0.0320
8 0.0000 0.0000 0.0000 0.0000
9 0.1186 0.1123 0.1008 0.0483
10 0.1145 0.1057 0.1197 0.0476
11 0.0623 0.0572 0.1328 0.0271
12 0.0353 0.0303 0.0243 0.0214
13 0.0521 0.0448 0.0386 0.0348
14 0.1397 0.1230 0.1062 0.0992
Table 1: Critical Load Factors for Different Operating Conditions
Table 2: Load Bus VCIs for Different Operating Conditions
31
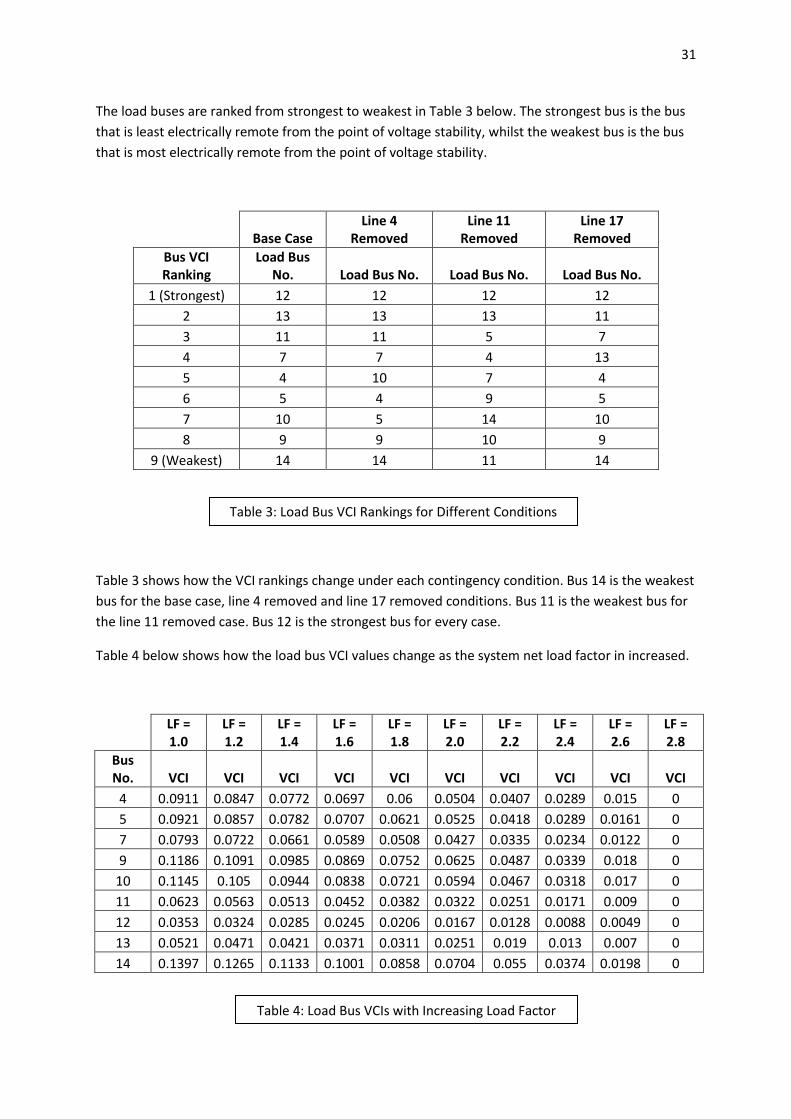
The load buses are ranked from strongest to weakest in Table 3 below. The strongest bus is the bus
that is least electrically remote from the point of voltage stability, whilst the weakest bus is the bus
that is most electrically remote from the point of voltage stability.
Base Case
Line 4 Removed
Line 11 Removed
Line 17 Removed
Bus VCI Ranking
Load Bus No. Load Bus No. Load Bus No. Load Bus No.
1 (Strongest) 12 12 12 12
2 13 13 13 11
3 11 11 5 7
4 7 7 4 13
5 4 10 7 4
6 5 4 9 5
7 10 5 14 10
8 9 9 10 9
9 (Weakest) 14 14 11 14
Table 3 shows how the VCI rankings change under each contingency condition. Bus 14 is the weakest
bus for the base case, line 4 removed and line 17 removed conditions. Bus 11 is the weakest bus for
the line 11 removed case. Bus 12 is the strongest bus for every case.
Table 4 below shows how the load bus VCI values change as the system net load factor in increased.
LF = 1.0
LF = 1.2
LF = 1.4
LF = 1.6
LF = 1.8
LF = 2.0
LF = 2.2
LF = 2.4
LF = 2.6
LF = 2.8
Bus No. VCI VCI VCI VCI VCI VCI VCI VCI VCI VCI
4 0.0911 0.0847 0.0772 0.0697 0.06 0.0504 0.0407 0.0289 0.015 0
5 0.0921 0.0857 0.0782 0.0707 0.0621 0.0525 0.0418 0.0289 0.0161 0
7 0.0793 0.0722 0.0661 0.0589 0.0508 0.0427 0.0335 0.0234 0.0122 0
9 0.1186 0.1091 0.0985 0.0869 0.0752 0.0625 0.0487 0.0339 0.018 0
10 0.1145 0.105 0.0944 0.0838 0.0721 0.0594 0.0467 0.0318 0.017 0
11 0.0623 0.0563 0.0513 0.0452 0.0382 0.0322 0.0251 0.0171 0.009 0
12 0.0353 0.0324 0.0285 0.0245 0.0206 0.0167 0.0128 0.0088 0.0049 0
13 0.0521 0.0471 0.0421 0.0371 0.0311 0.0251 0.019 0.013 0.007 0
14 0.1397 0.1265 0.1133 0.1001 0.0858 0.0704 0.055 0.0374 0.0198 0
Table 3: Load Bus VCI Rankings for Different Conditions
Table 4: Load Bus VCIs with Increasing Load Factor
32
Table 4 indeed shows that the load bus VCI values get smaller as the load factor is increased, but this
data is not useful as voltages phasors by themselves can provide this information. The VCI is thus
better used for determining the weak buses in a transmission network. The VCI can be useful when a
change in system operating conditions occurs (e.g. when a line becomes out of service). After a
change in system operating conditions occurs, voltage phasor data for the new operating condition
can be extracted. This extracted data can then be used so that the bus ranking can be updated to
show which buses are now the weakest.
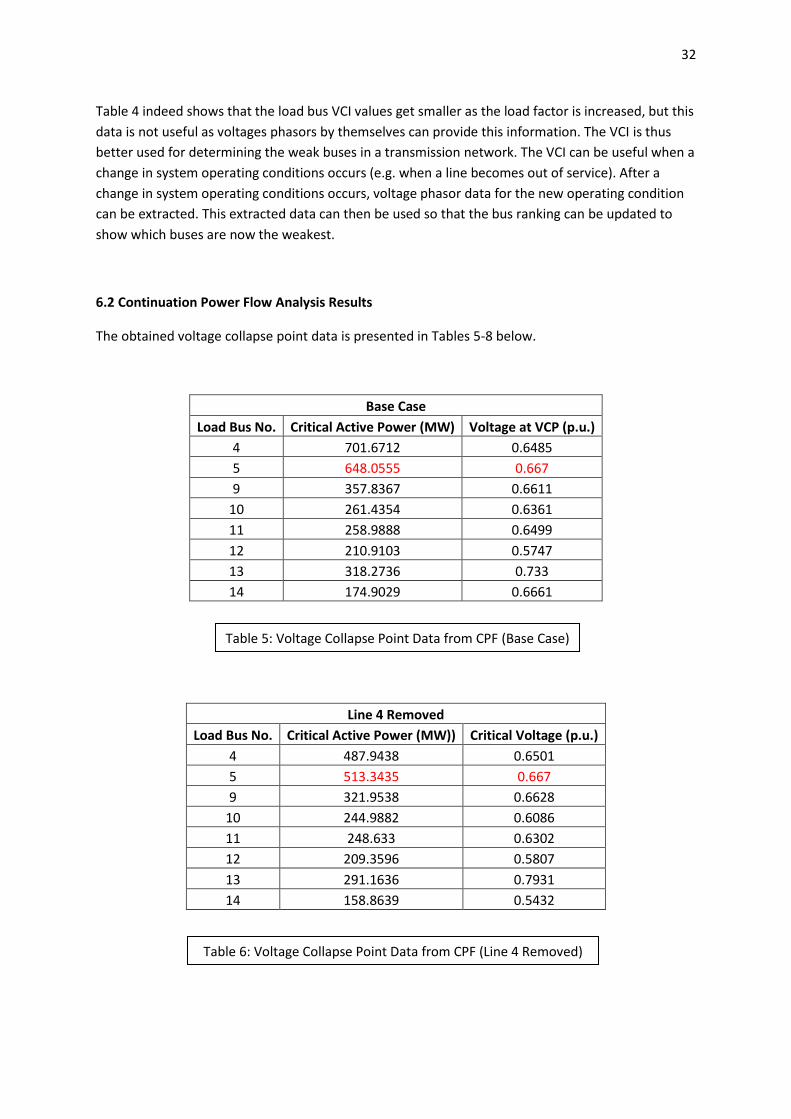
6.2 Continuation Power Flow Analysis Results
The obtained voltage collapse point data is presented in Tables 5-8 below.
Base Case
Load Bus No. Critical Active Power (MW) Voltage at VCP (p.u.)
4 701.6712 0.6485
5 648.0555 0.667
9 357.8367 0.6611
10 261.4354 0.6361
11 258.9888 0.6499
12 210.9103 0.5747
13 318.2736 0.733
14 174.9029 0.6661
Line 4 Removed
Load Bus No. Critical Active Power (MW)) Critical Voltage (p.u.)
4 487.9438 0.6501
5 513.3435 0.667
9 321.9538 0.6628
10 244.9882 0.6086
11 248.633 0.6302
12 209.3596 0.5807
13 291.1636 0.7931
14 158.8639 0.5432
Table 5: Voltage Collapse Point Data from CPF (Base Case)
Table 6: Voltage Collapse Point Data from CPF (Line 4 Removed)
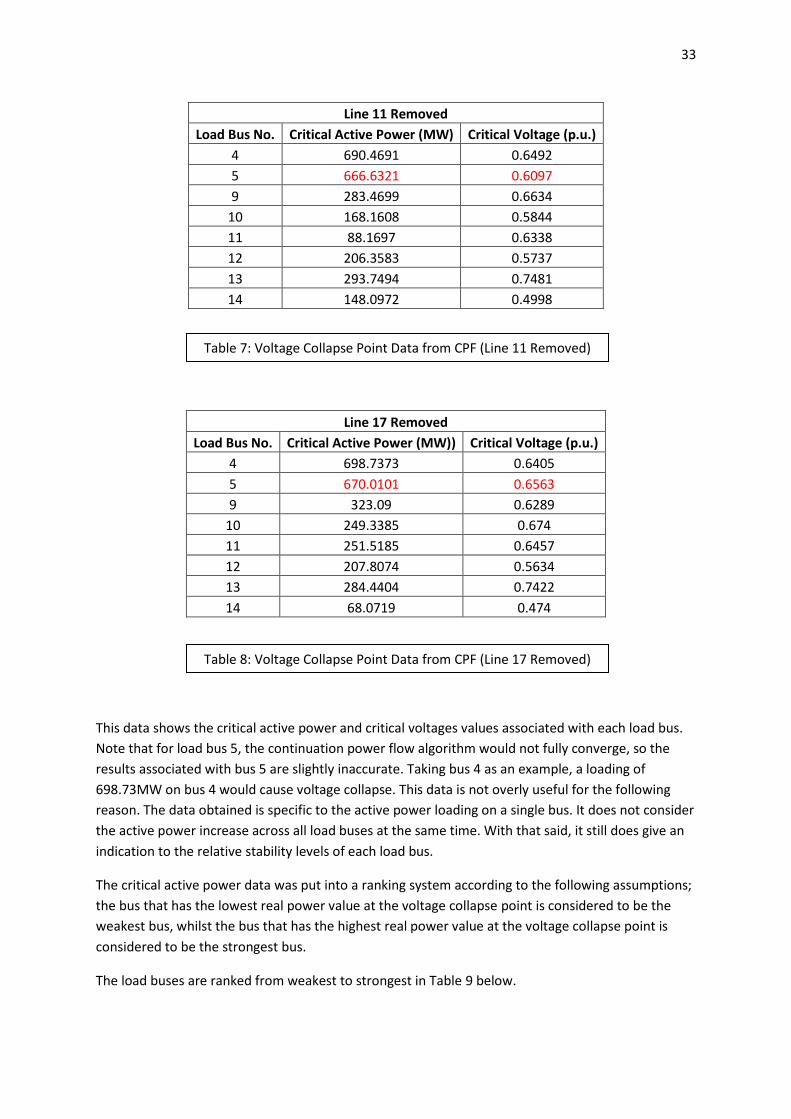
33
Line 11 Removed
Load Bus No. Critical Active Power (MW) Critical Voltage (p.u.)
4 690.4691 0.6492
5 666.6321 0.6097
9 283.4699 0.6634
10 168.1608 0.5844
11 88.1697 0.6338
12 206.3583 0.5737
13 293.7494 0.7481
14 148.0972 0.4998
Line 17 Removed
Load Bus No. Critical Active Power (MW)) Critical Voltage (p.u.)
4 698.7373 0.6405
5 670.0101 0.6563
9 323.09 0.6289
10 249.3385 0.674
11 251.5185 0.6457
12 207.8074 0.5634
13 284.4404 0.7422
14 68.0719 0.474
This data shows the critical active power and critical voltages values associated with each load bus.
Note that for load bus 5, the continuation power flow algorithm would not fully converge, so the
results associated with bus 5 are slightly inaccurate. Taking bus 4 as an example, a loading of
698.73MW on bus 4 would cause voltage collapse. This data is not overly useful for the following
reason. The data obtained is specific to the active power loading on a single bus. It does not consider
the active power increase across all load buses at the same time. With that said, it still does give an
indication to the relative stability levels of each load bus.
The critical active power data was put into a ranking system according to the following assumptions;
the bus that has the lowest real power value at the voltage collapse point is considered to be the
weakest bus, whilst the bus that has the highest real power value at the voltage collapse point is
considered to be the strongest bus.
The load buses are ranked from weakest to strongest in Table 9 below.
Table 7: Voltage Collapse Point Data from CPF (Line 11 Removed)
Table 8: Voltage Collapse Point Data from CPF (Line 17 Removed)
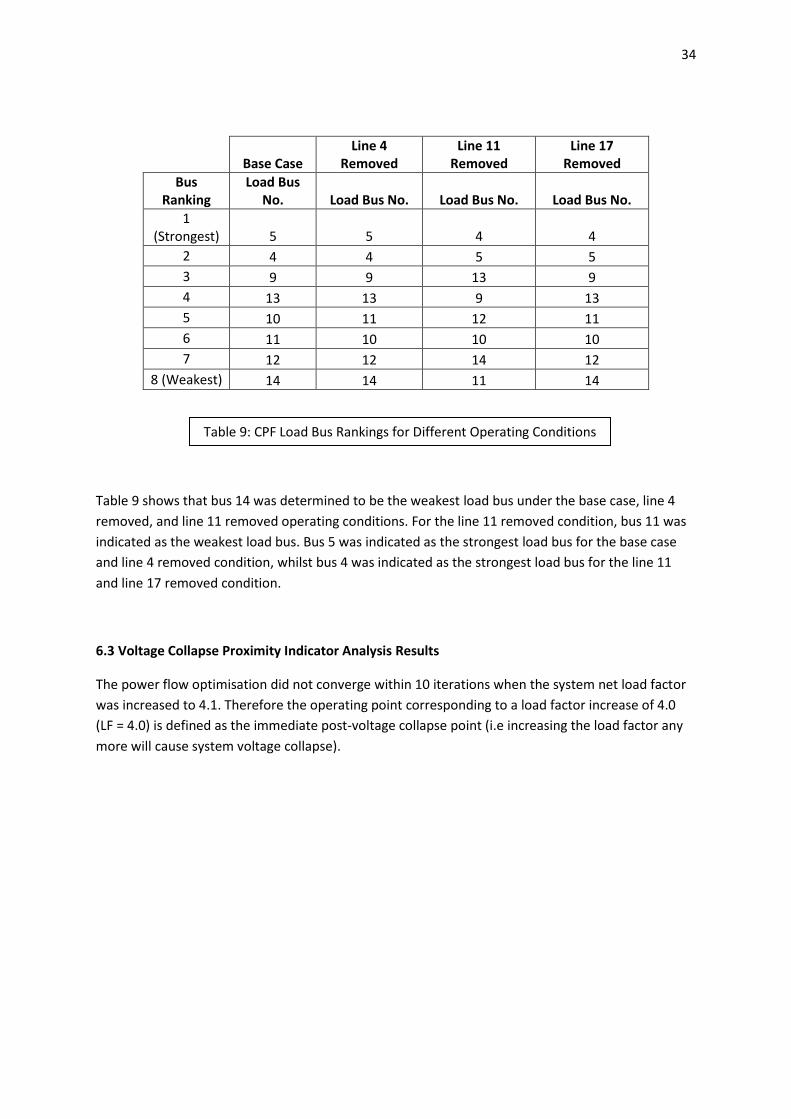
34
Base Case Line 4
Removed Line 11
Removed Line 17
Removed
Bus Ranking
Load Bus No. Load Bus No. Load Bus No. Load Bus No.
1 (Strongest) 5 5 4 4
2 4 4 5 5
3 9 9 13 9
4 13 13 9 13
5 10 11 12 11
6 11 10 10 10
7 12 12 14 12
8 (Weakest) 14 14 11 14
Table 9 shows that bus 14 was determined to be the weakest load bus under the base case, line 4
removed, and line 11 removed operating conditions. For the line 11 removed condition, bus 11 was
indicated as the weakest load bus. Bus 5 was indicated as the strongest load bus for the base case
and line 4 removed condition, whilst bus 4 was indicated as the strongest load bus for the line 11
and line 17 removed condition.
6.3 Voltage Collapse Proximity Indicator Analysis Results
The power flow optimisation did not converge within 10 iterations when the system net load factor
was increased to 4.1. Therefore the operating point corresponding to a load factor increase of 4.0
(LF = 4.0) is defined as the immediate post-voltage collapse point (i.e increasing the load factor any
more will cause system voltage collapse).
Table 9: CPF Load Bus Rankings for Different Operating Conditions
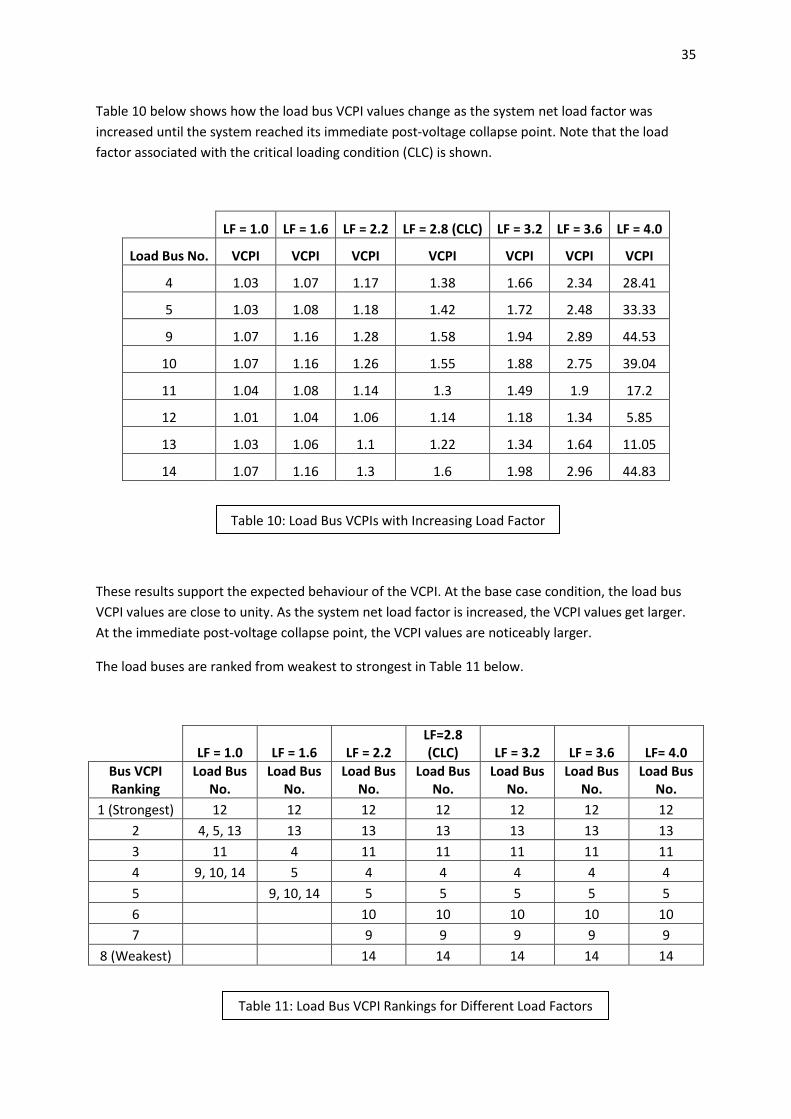
35
Table 10 below shows how the load bus VCPI values change as the system net load factor was
increased until the system reached its immediate post-voltage collapse point. Note that the load
factor associated with the critical loading condition (CLC) is shown.
LF = 1.0 LF = 1.6 LF = 2.2 LF = 2.8 (CLC) LF = 3.2 LF = 3.6 LF = 4.0
Load Bus No. VCPI VCPI VCPI VCPI VCPI VCPI VCPI
4 1.03 1.07 1.17 1.38 1.66 2.34 28.41
5 1.03 1.08 1.18 1.42 1.72 2.48 33.33
9 1.07 1.16 1.28 1.58 1.94 2.89 44.53
10 1.07 1.16 1.26 1.55 1.88 2.75 39.04
11 1.04 1.08 1.14 1.3 1.49 1.9 17.2
12 1.01 1.04 1.06 1.14 1.18 1.34 5.85
13 1.03 1.06 1.1 1.22 1.34 1.64 11.05
14 1.07 1.16 1.3 1.6 1.98 2.96 44.83
These results support the expected behaviour of the VCPI. At the base case condition, the load bus
VCPI values are close to unity. As the system net load factor is increased, the VCPI values get larger.
At the immediate post-voltage collapse point, the VCPI values are noticeably larger.
The load buses are ranked from weakest to strongest in Table 11 below.
LF = 1.0 LF = 1.6 LF = 2.2
LF=2.8 (CLC) LF = 3.2 LF = 3.6 LF= 4.0
Bus VCPI Ranking
Load Bus No.
Load Bus No.
Load Bus No.
Load Bus No.
Load Bus No.
Load Bus No.
Load Bus No.
1 (Strongest) 12 12 12 12 12 12 12
2 4, 5, 13 13 13 13 13 13 13
3 11 4 11 11 11 11 11
4 9, 10, 14 5 4 4 4 4 4
5 9, 10, 14 5 5 5 5 5
6 10 10 10 10 10
7 9 9 9 9 9
8 (Weakest) 14 14 14 14 14
Table 10: Load Bus VCPIs with Increasing Load Factor
Table 11: Load Bus VCPI Rankings for Different Load Factors
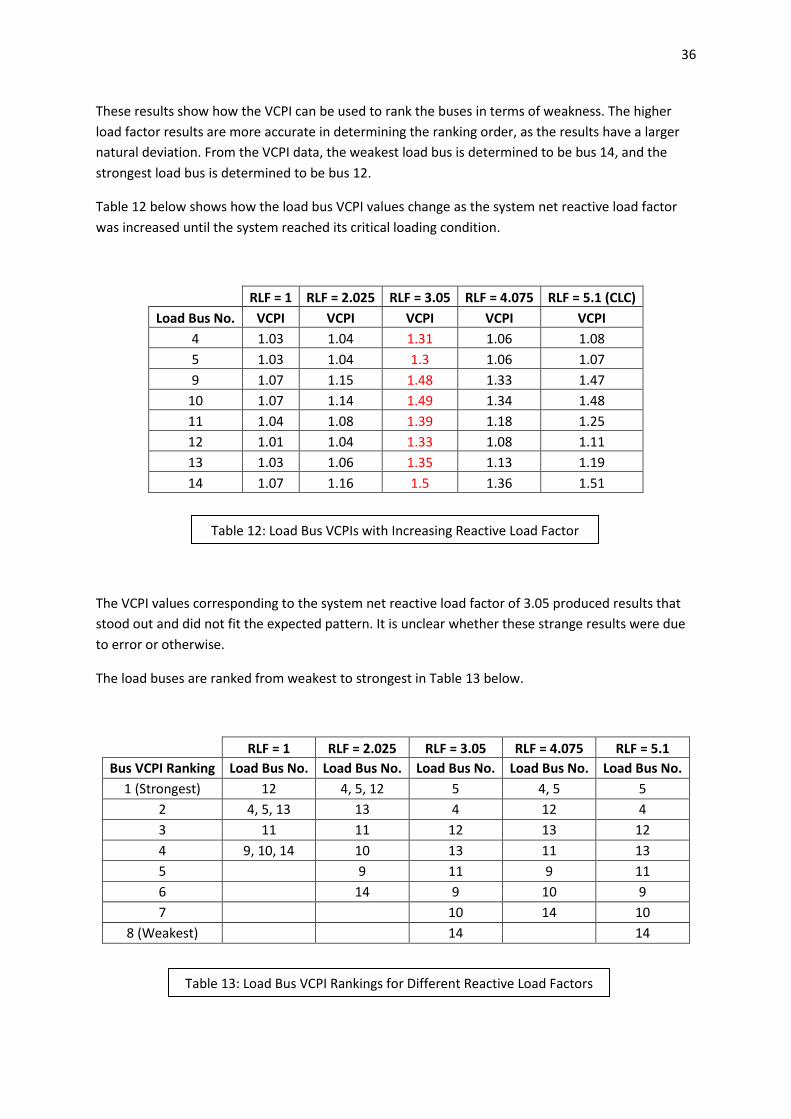
36
These results show how the VCPI can be used to rank the buses in terms of weakness. The higher
load factor results are more accurate in determining the ranking order, as the results have a larger
natural deviation. From the VCPI data, the weakest load bus is determined to be bus 14, and the
strongest load bus is determined to be bus 12.
Table 12 below shows how the load bus VCPI values change as the system net reactive load factor
was increased until the system reached its critical loading condition.
RLF = 1 RLF = 2.025 RLF = 3.05 RLF = 4.075 RLF = 5.1 (CLC)
Load Bus No. VCPI VCPI VCPI VCPI VCPI
4 1.03 1.04 1.31 1.06 1.08
5 1.03 1.04 1.3 1.06 1.07
9 1.07 1.15 1.48 1.33 1.47
10 1.07 1.14 1.49 1.34 1.48
11 1.04 1.08 1.39 1.18 1.25
12 1.01 1.04 1.33 1.08 1.11
13 1.03 1.06 1.35 1.13 1.19
14 1.07 1.16 1.5 1.36 1.51
The VCPI values corresponding to the system net reactive load factor of 3.05 produced results that
stood out and did not fit the expected pattern. It is unclear whether these strange results were due
to error or otherwise.
The load buses are ranked from weakest to strongest in Table 13 below.
RLF = 1 RLF = 2.025 RLF = 3.05 RLF = 4.075 RLF = 5.1
Bus VCPI Ranking Load Bus No. Load Bus No. Load Bus No. Load Bus No. Load Bus No.
1 (Strongest) 12 4, 5, 12 5 4, 5 5
2 4, 5, 13 13 4 12 4
3 11 11 12 13 12
4 9, 10, 14 10 13 11 13
5 9 11 9 11
6 14 9 10 9
7 10 14 10
8 (Weakest) 14 14
Table 12: Load Bus VCPIs with Increasing Reactive Load Factor
Table 13: Load Bus VCPI Rankings for Different Reactive Load Factors
37
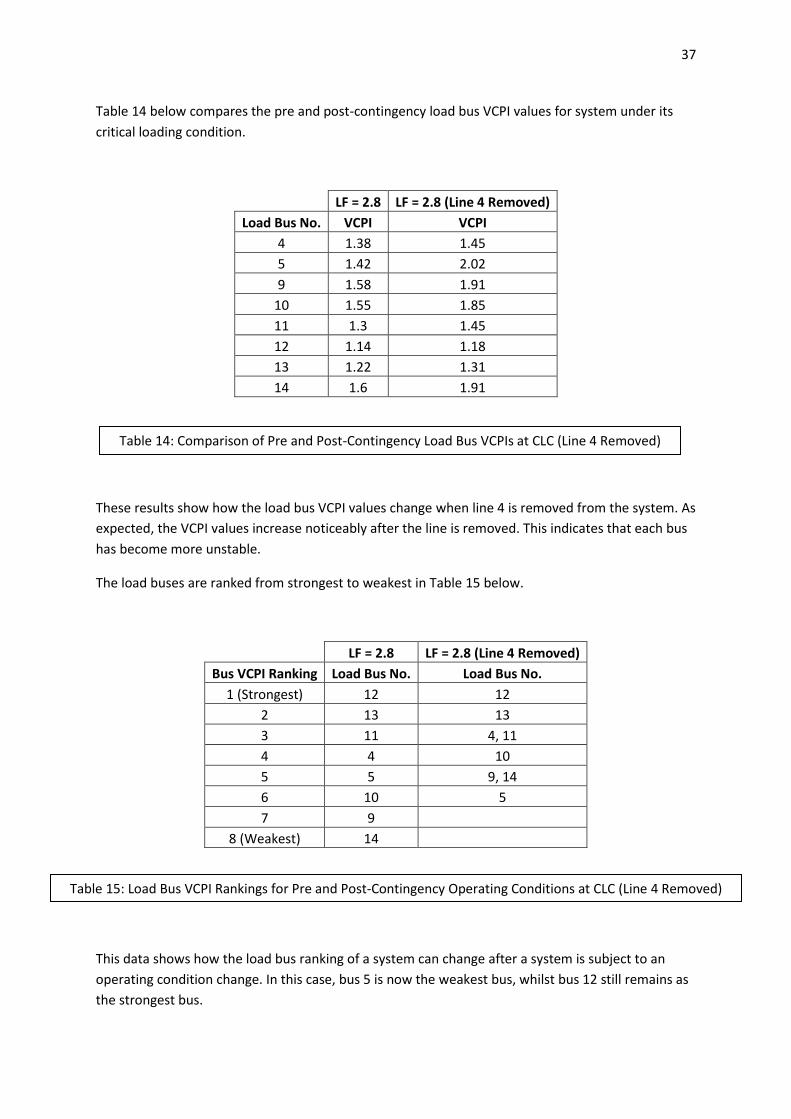
Table 14 below compares the pre and post-contingency load bus VCPI values for system under its
critical loading condition.
LF = 2.8 LF = 2.8 (Line 4 Removed)
Load Bus No. VCPI VCPI
4 1.38 1.45
5 1.42 2.02
9 1.58 1.91
10 1.55 1.85
11 1.3 1.45
12 1.14 1.18
13 1.22 1.31
14 1.6 1.91
These results show how the load bus VCPI values change when line 4 is removed from the system. As
expected, the VCPI values increase noticeably after the line is removed. This indicates that each bus
has become more unstable.
The load buses are ranked from strongest to weakest in Table 15 below.
LF = 2.8 LF = 2.8 (Line 4 Removed)
Bus VCPI Ranking Load Bus No. Load Bus No.
1 (Strongest) 12 12
2 13 13
3 11 4, 11
4 4 10
5 5 9, 14
6 10 5
7 9
8 (Weakest) 14
This data shows how the load bus ranking of a system can change after a system is subject to an
operating condition change. In this case, bus 5 is now the weakest bus, whilst bus 12 still remains as
the strongest bus.
Table 14: Comparison of Pre and Post-Contingency Load Bus VCPIs at CLC (Line 4 Removed)
Table 15: Load Bus VCPI Rankings for Pre and Post-Contingency Operating Conditions at CLC (Line 4 Removed)
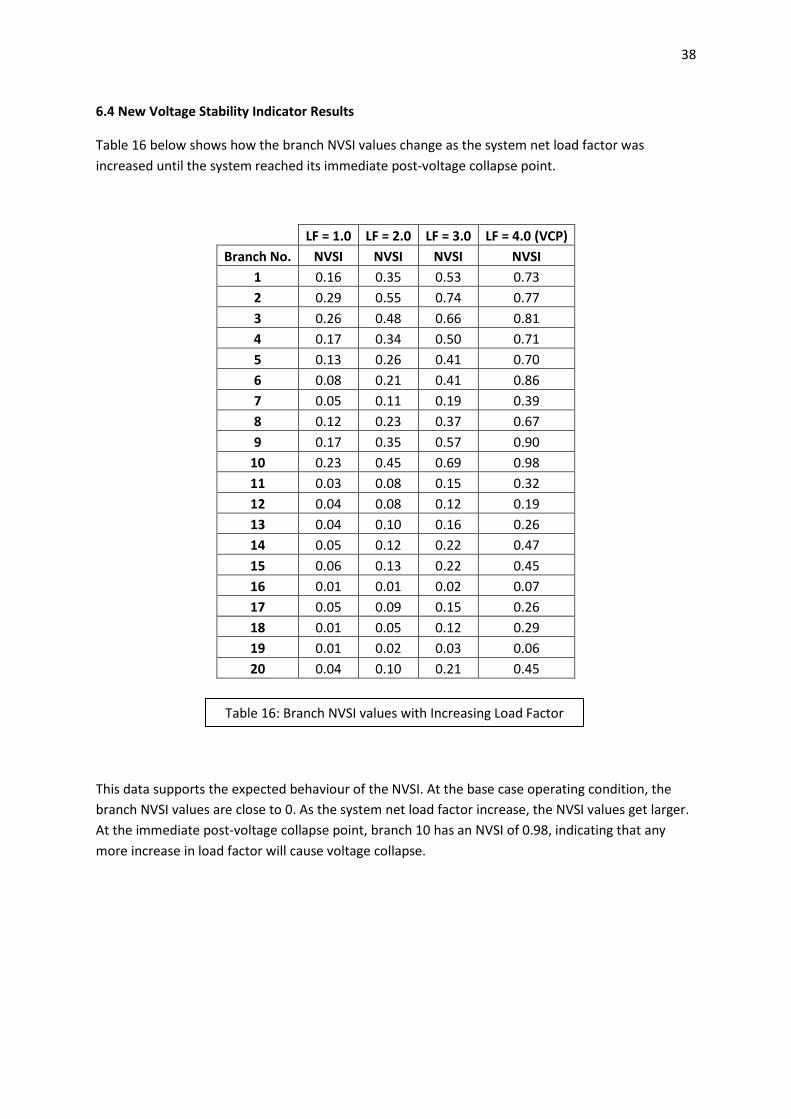
38
6.4 New Voltage Stability Indicator Results
Table 16 below shows how the branch NVSI values change as the system net load factor was
increased until the system reached its immediate post-voltage collapse point.
LF = 1.0 LF = 2.0 LF = 3.0 LF = 4.0 (VCP)
Branch No. NVSI NVSI NVSI NVSI
1 0.16 0.35 0.53 0.73
2 0.29 0.55 0.74 0.77
3 0.26 0.48 0.66 0.81
4 0.17 0.34 0.50 0.71
5 0.13 0.26 0.41 0.70
6 0.08 0.21 0.41 0.86
7 0.05 0.11 0.19 0.39
8 0.12 0.23 0.37 0.67
9 0.17 0.35 0.57 0.90
10 0.23 0.45 0.69 0.98
11 0.03 0.08 0.15 0.32
12 0.04 0.08 0.12 0.19
13 0.04 0.10 0.16 0.26
14 0.05 0.12 0.22 0.47
15 0.06 0.13 0.22 0.45
16 0.01 0.01 0.02 0.07
17 0.05 0.09 0.15 0.26
18 0.01 0.05 0.12 0.29
19 0.01 0.02 0.03 0.06
20 0.04 0.10 0.21 0.45
This data supports the expected behaviour of the NVSI. At the base case operating condition, the
branch NVSI values are close to 0. As the system net load factor increase, the NVSI values get larger.
At the immediate post-voltage collapse point, branch 10 has an NVSI of 0.98, indicating that any
more increase in load factor will cause voltage collapse.
Table 16: Branch NVSI values with Increasing Load Factor
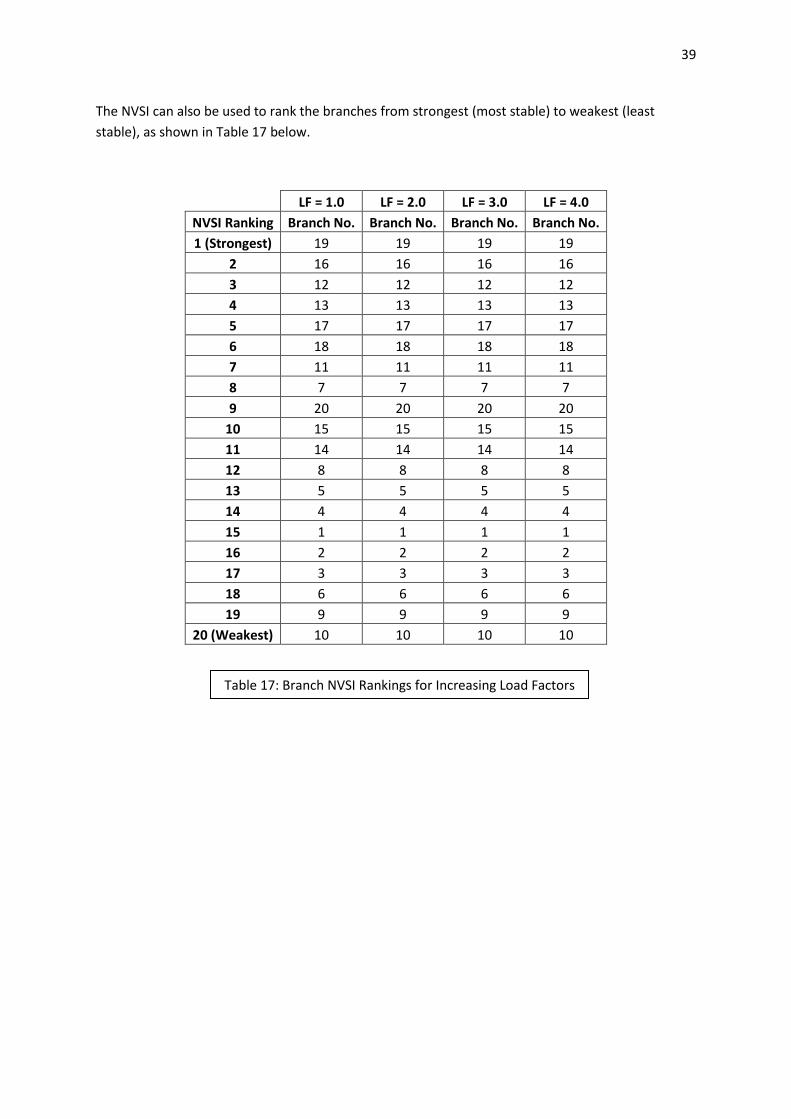
39
The NVSI can also be used to rank the branches from strongest (most stable) to weakest (least
stable), as shown in Table 17 below.
LF = 1.0 LF = 2.0 LF = 3.0 LF = 4.0
NVSI Ranking Branch No. Branch No. Branch No. Branch No.
1 (Strongest) 19 19 19 19
2 16 16 16 16
3 12 12 12 12
4 13 13 13 13
5 17 17 17 17
6 18 18 18 18
7 11 11 11 11
8 7 7 7 7
9 20 20 20 20
10 15 15 15 15
11 14 14 14 14
12 8 8 8 8
13 5 5 5 5
14 4 4 4 4
15 1 1 1 1
16 2 2 2 2
17 3 3 3 3
18 6 6 6 6
19 9 9 9 9
20 (Weakest) 10 10 10 10
Table 17: Branch NVSI Rankings for Increasing Load Factors
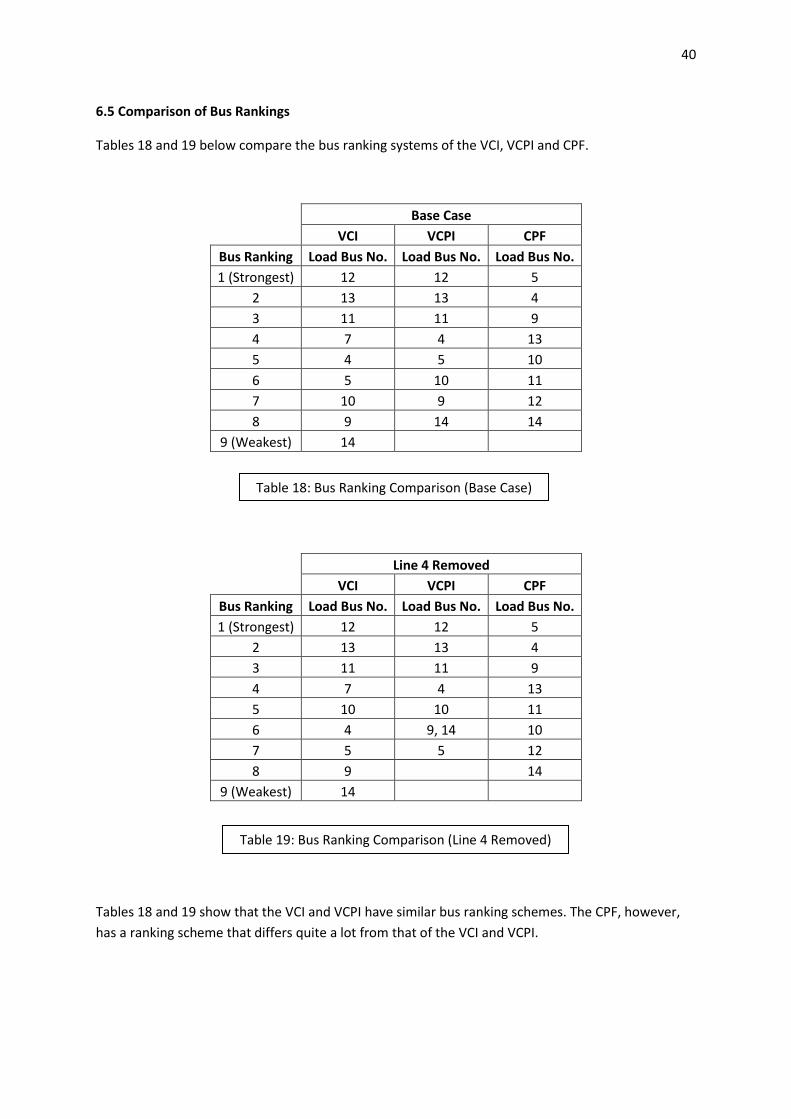
40
6.5 Comparison of Bus Rankings
Tables 18 and 19 below compare the bus ranking systems of the VCI, VCPI and CPF.
Base Case
VCI VCPI CPF
Bus Ranking Load Bus No. Load Bus No. Load Bus No.
1 (Strongest) 12 12 5
2 13 13 4
3 11 11 9
4 7 4 13
5 4 5 10
6 5 10 11
7 10 9 12
8 9 14 14
9 (Weakest) 14
Line 4 Removed
VCI VCPI CPF
Bus Ranking Load Bus No. Load Bus No. Load Bus No.
1 (Strongest) 12 12 5
2 13 13 4
3 11 11 9
4 7 4 13
5 10 10 11
6 4 9, 14 10
7 5 5 12
8 9 14
9 (Weakest) 14
Tables 18 and 19 show that the VCI and VCPI have similar bus ranking schemes. The CPF, however,
has a ranking scheme that differs quite a lot from that of the VCI and VCPI.
Table 18: Bus Ranking Comparison (Base Case)
Table 19: Bus Ranking Comparison (Line 4 Removed)
41
6.6 Further Discussion of Results
The simulations in this section looked at four proposed voltage stability analysis methods. The
simulations found that the VCPI and NVSI were the best for detecting when the system was at the
voltage collapse point. This was demonstrated in the results by the following:
- The VCPI bus values became noticeably large and began to approach infinity at the
immediate post-voltage collapse point.
- The NVSI bus values became very close to 1 at the immediate post-voltage collapse point.
In general, these two indices provided an accurate measure of system stability. The VCPI and NVSI
were also useful for creating ranking systems. The VCPI can rank the load buses in terms of strength,
whilst the NVSI can rank the transmission branches in terms of strength. It can thus be concluded
that synchrophasor measurements could be effectively used to compute these indices to give a
measure of system voltage stability. The VCPI, however, does not effectively show how close the
system is to voltage collapse. The NVSI does a much better job at doing this.
The VCI was determined to be less useful for detecting the voltage collapse point of a system. The
VCI is much more useful for ranking buses from strongest to weakest, or ‘closest to stability’ to
‘furthest from stability’. A way that the VCI could be used in a ‘more dynamic’ way is by using the
synchrophasor measurements to recompute and update load bus rankings after operating condition
changes occur.
The CPF method created curves that showed the effect that increasing the active power of a bus has
on its voltage. These curves were used to determine the critical voltage and critical power of each
load bus in the system. The problem with the CPF method is that the PV curves created were based
on increasing the active power loading of the bus being analysed only. This is an unrealistic condition
and therefore synchrophasor measurements generally cannot be used in conjunction with the CPF
method to detect voltage instability and voltage collapse. The CPF method can, however, be used to
create a ranking of the load buses. Unfortunately, it was found that the bus ranking developed by
the CPF method was quite different to the bus ranking produced by the VCI and VCPI. It was thus
concluded that the CPF method was the least useful analysis tool.
These results show how VSIs can effectively be used for voltage collapse detection in real time. The
indices can predict voltage stability, locate vulnerable sections of a power system and can predict a
system’s voltage collapse point. As PMUs are able to capture the faster variations that may indicate
small-signal stability problems in a power system [32], they can be used in conjunction with
traditional methods to form hybrid systems. For example, PMUs can be used with SCADA
measurement systems which are able to provide a picture of the steady-state health of a power
system. [32]
42
7.0 Conclusion and Recommendations
7.1 Conclusion
This thesis investigated the use of synchrophasors in analysing voltage stability and detecting voltage
collapse. The voltage stability analysis methods used in conjunction with the synchrophasor
measurements obtained from the simulations were the Voltage Change Index (VSI), the Voltage
Collapse Proximity Indicator (VCPI), Continuation Power Flow (CPF) and the New Voltage Stability
Index (NVSI). The simulations were done in MATPOWER and used the IEEE 14-bus system.
The VCI was determined to not be useful in detecting voltage collapse. It does, however, provide a
useful bus ranking system that lists each load bus from ‘strongest’ to ‘weakest’. The weakest bus
refers to the bus that experiences the largest voltage change when going from an initial operating
point to the critical loading condition. The VCI was determined to be useful for updating bus ranking
systems after changes in system operating condition occurs (e.g. when a line becomes out of
service).
The VCPI proved to be an effective indicator of voltage stability levels. It was, however, not so
effective at indicating proximity to voltage collapse. As the system net load factor was increased, the
VCPI tended to increase as well. The VCPI indicates that voltage collapse is about to occur when its
magnitude gets significantly larger and begins to approach infinity. The problem lies in the fact that
the index does not have a way of determining when this will start happening (unlike the NVSI where
the voltage collapse occurs when one of the branch indexes reaches the value of 1). Another issue
with the VCPI is that it requires the loads to have significant reactive power loading components.
Like the VCI, the VCPI could be used to create a bus ranking system. The bus ranking systems of the
VCI and VCPI were very similar.
The CPF method was the least useful method for analysing voltage stability and detecting voltage
collapse. The reason for this was because it is based on the usage of load bus PV curves which were
generated by increasing the active power loading of just one load until the power system reached
voltage collapse. As this is an unrealistic condition, it cannot adequately be used in dynamic analysis
and does not provide much useful data. The CPF method can provide a bus ranking system (by
ranking the critical powers of each load bus) but this ranking proved to deviate heavily from the
rankings created by the VCI and VCPI.
The NVSI proved to have the greatest capability in measuring voltage stability and detecting voltage
collapse. This is due to the fact that the index lies between 0 and 1, with 1 indicating system voltage
collapse. Simulations validated this, with some branch NVSI values becoming very close to 1 at the
immediate post-voltage collapse point. Because the NVSI has such clear margins, it cannot only be
used to gauge system stability, but it can also be used to determine a system’s proximity to voltage
collapse. The NVSI could also be used to rank the transmission branches in terms of stability.

43
7.2 Recommendations
This report investigated the use of various voltage stability analysis tools using a steady state
analysis approach. A recommendation for future synchrophasor studies would be to use a dynamic
analysis approach. This type of approach would allow for a more in-depth analysis into the time-
response of power systems and how voltage stability indices respond to system disturbances and
operating condition changes.
A natural extension of this research would be to investigate further into the use of the NVSI and VCPI
stability indices as these indices proved to be the most effective at monitoring bus voltage stability.
These indices could be investigated using a larger power network (perhaps a 30 or 40 bus system)
and a much larger array of operating conditions could be simulated in order to provide more in-
depth results.
Further extension of this research includes investigating methods of voltage stability correction and
how VSIs could be used in conjunction with these correction methods.
44
8.0 Works Cited
[1] International Energy Outlook 2013 (IEO2013), released by the U.S. Energy Information
Administration (EIA), 2013
[2] Bloomberg New Energy Finance, “New Energy Outlook 2015”, URL:
http://www.bloomberg.com/company/new-energy-outlook/
[3] M. Glavic Quanta Technology, USAD. Novosel ; E. Heredia ; D. Kosterev ; A. Salazar ; F. Habibi-
Ashrafi ; M. Donnelly “Real-Time Voltage Control Under Stressed Conditions”, IEEE Power and
Energy Magazine (Volume: 10, Issue: 4), pp. 43-55
[4] National Instruments NI 9244 Datasheet, URL: http://www.ni.com/datasheet/pdf/en/ds-527
[5] Eric Sagen, Kenneth Workman, Schweitzer Engineering Laboratories, Inc, “Methods of Time
Synchronization”, 63rd Annual Georgia Tech Protective Relaying Conference Atlanta, Georgia, April
22–24, 2009
[6] Ray D. Zimmerman, Carlos E. Murillo-Sanchez, “MATPOWER 5.1 User’s Manual”, March 20 2015,
URL: http://www.pserc.cornell.edu/matpower/manual.pdf
[7] Illinois Center for a Smarter Electric Grid (ICSEG), IEEE 14-bus system, URL:
http://icseg.iti.illinois.edu/ieee-14-bus-system, Date accessed: October 2015
[8] Roy Moxley, “Synchrophasors in the Real World”, Schweitzer Engineering Laboratories, Inc.,
2006, URL:
https://cdn.selinc.com/assets/Literature/Publications/Technical%20Papers/6194_Synchrophasors_R
M_20060118_Web.pdf?v=20160303-081549
[9] Electric Power Research Institute, “Phasor Measurement Unit (PMU) Implementation and
Applications”, EPRI, Palo Alto, CA: 2007. 1015511
[10] Waheed Ur Rahman, Muhammad Ali, Chaudhry A. Mehmood, Asadullah Khan, “Design and
Implementation for Wide Area Power System Monitoring and Protection using Phasor measuring
Units” Electrical Engineering Department, COMSATS Institute of Information Technology, April 2013
[11] C. P. Steinmetz, “Power control and stability of electric generating stations” AIEE Trans., vol.
XXXIX, Part II, July 1920, pp. 1215-1287
[12] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, “Definition and Classification of
Power System Stability”, IEEE Transactions on Power Systems (Volume: 19, Issue: 3) 2003
[13] Kumaraswamy, Jahnavi,W.V., Devaraju,T., Ramesh,P.,“An Optimal Power Flow (OPF) Method
with Improved Voltage Stability Analysis”, Proceedings of the World Congress on Engineering
London, U.K. Vol. II, July 4 -6, 2012
[14] Stefan Johansson, Fredrik Sjogren, “Voltage Collapse in Power Systems”, Chalmers University of
Technology 1995. URL: http://webfiles.portal.chalmers.se/et/Lic/Johansson%26SjogrenLic.pdf
45
[15] Günther Beck, Dusan Povh, Dietmar Retzmann, Erwin Teltsch, “Global Blackouts – Lessons
Learned”, Siemens, July 2011. URL: http://www.energy.siemens.com/mx/pool/hq/power-
transmission/HVDC/Global_Blackouts.pdf
[16] I Kumarswamy and P Ramanareddy. “Analysis of Voltage Stability Using L-Index Method”. 2011.
ECO Services International
[17] B. Gao, G.K. Morison, P. Kundur, “Towards the development of a systematic approach for
voltage stability assessment of large-scale power systems”, IEEE Transactions on Power Systems
(Volume: 11, Issue: 3), August 1996. pp. 1314-1324
[18] Yanfeng Gong, N. Schulz, N. Guzman, "Synchrophasor-Based Real-Time Voltage Stability Index",
2006 IEEE PES Power Systems Conference and Exposition, Oct. 29 2006-Nov. 1 2006, pp. 1029-1036
[19] PowerWorld Corporation, “Voltage Stability Using PV Curves”, URL:
http://www.powerworld.com/files/S06PVCurves.pdf, Access date: October 2015
[20] PowerWorld Corporation, “Voltage Stability Using QV Curves”, URL:
http://www.powerworld.com/files/S07QVCuvers.pdf, Access date: October 2015
[21] Bhawana Telang, Prabodh Khampariya, “Voltage Stability Evaluation Using Modal Analysis”,
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278-0882
Volume 4, Issue 4, April 2015, pp. 1529-1542
[22] P. Kessel, Glavitsch, ”Estimating the Voltage Stability of a Power System”, IEEE Transaction
on Power Delivery, Vol PWRD-1, No 3, July 1986, pp. 346-354
[23] B. Mahipal, P. Venugopal Rao, T. Swetha, G. Babu Naik, Ch. Nareshkumar, “A New Technique to
find the effect of Active Power Loading on Voltage Stability and Algorithm to improve Voltage
Stability of Radial and Meshed Power Systems”, Journal of Information Engineering and Applications
ISSN 2224-5782 (print) ISSN 2225-0506 (online) Vol.3, No.5, 2013
[24] H.J.C.P. Pinto, N. Martins, X. Vieira F°, A. Bianco, P. Gomes, M. G. dos Santos, “Modal Analysis
for Voltage Stability: Application at Base Case and Point of Collapse”, Bulk Power System Voltage
Phenomena - III Voltage Stability, Security & Control Davos, Switzerland, 22-26 August 1994
[25] S Shirisha, P l v Prasanna and Siva Mallikarjuna N Rao. Article: “Evaluation of Modal Analysis for
Voltage Stability using Artificial Immune Systems”, International Journal of Computer Applications
46(9):6-10, May 2012
[26] J.L. Kirtley Jr., Massachusetts Institute of Technology, “Introduction to Load Flow”, URL:
http://ocw.mit.edu/courses/electrical-engineering-and-computer-science/6-061-introduction-to-
electric-power-systems-spring-2011/readings/MIT6_061S11_ch5.pdf
[27] Wolfram Alpha, Jacobian Matrices, URL: http://mathworld.wolfram.com/Jacobian.html
[28] Y.L. Chen, C.W. Chang, C.C. Liu, “Efficient methods for identifying weak nodes in electrical power
networks”, IEE Proceedings - Generation, Transmission and Distribution (Volume: 142, Issue: 3), May
1995, pp. 317-322

46
[29] O.O. Obadina, G.J. Berg, “Identifying electrically weak and strong segments of a power system
from a voltage stability viewpoint”, IEE Proceedings C - Generation, Transmission and Distribution
(Volume: 137, Issue: 3), 19 June 1989, pp. 205-212
[30] R. Kanimozhi, K. Selvi, “A Novel Line Stability Index for Voltage Stability Analysis and
Contingency Ranking in Power System Using Fuzzy Based Load Flow”, JEET, Vol. 8, No. 4, July 2013
[31] Ray D. Zimmerman, Carlos E. Murillo-Sanchez, “MATPOWER’s Extensible Optimal Power Flow
Architecture”, 2009 IEEE Power & Energy Society General Meeting, 26-30 July 2009, pp. 1-7
[32] R. Klump ; Lewis University & PowerWorld Corporation ; R. E. Wilson ; K. E. Martin, “Visualizing
Real-Time Security Threats Using Hybrid SCADA / PMU Measurement Displays”, Proceedings of the
38th Annual Hawaii International Conference on System Sciences, 03-06 Jan. 2005, pp. 55c
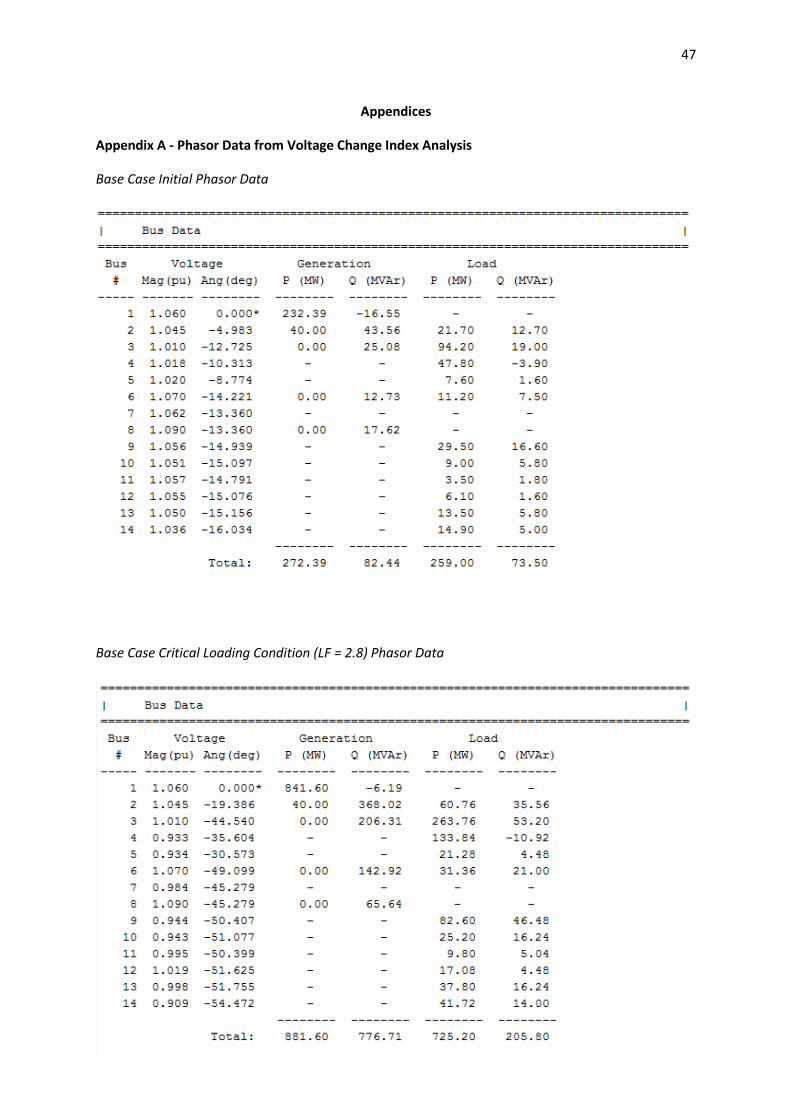
47
Appendices
Appendix A - Phasor Data from Voltage Change Index Analysis
Base Case Initial Phasor Data
Base Case Critical Loading Condition (LF = 2.8) Phasor Data
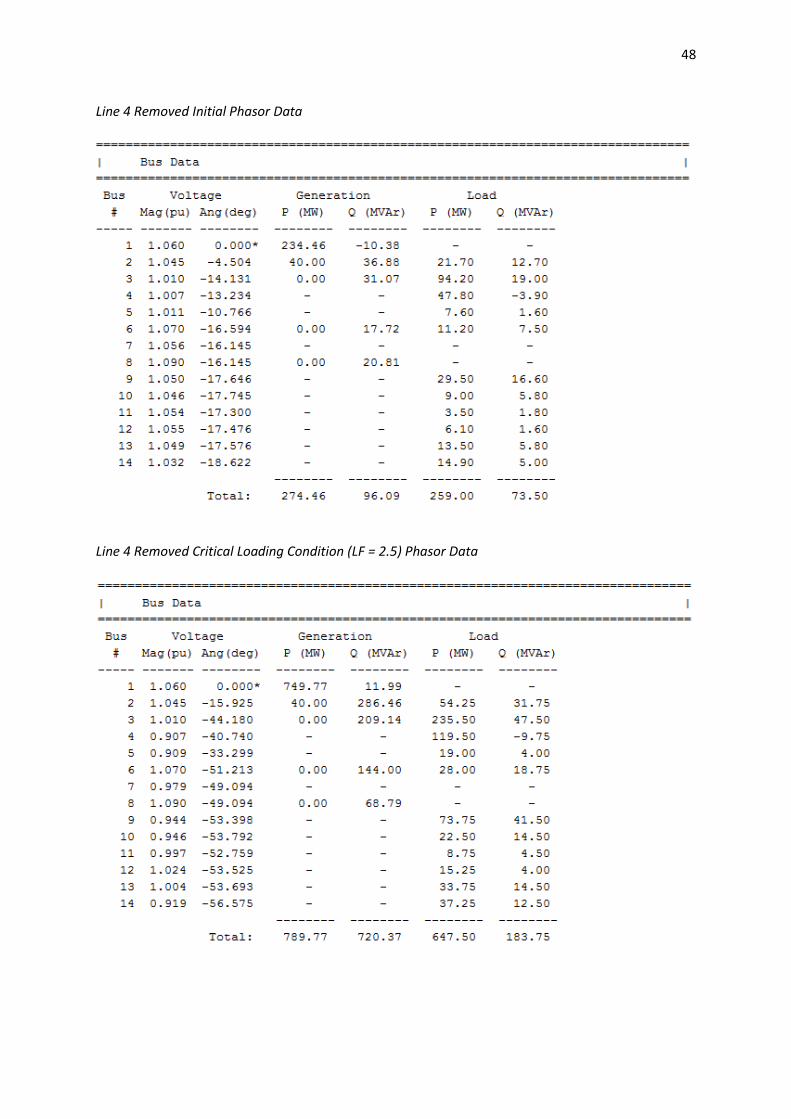
48
Line 4 Removed Initial Phasor Data
Line 4 Removed Critical Loading Condition (LF = 2.5) Phasor Data
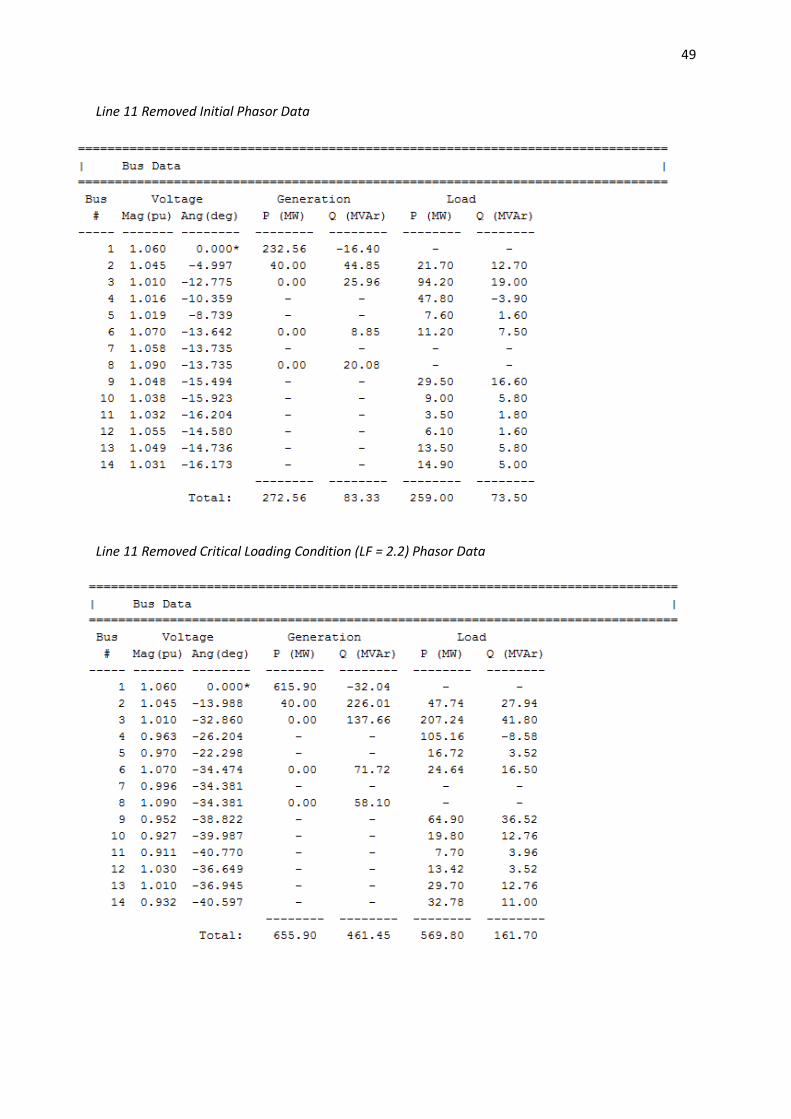
49
Line 11 Removed Initial Phasor Data
Line 11 Removed Critical Loading Condition (LF = 2.2) Phasor Data
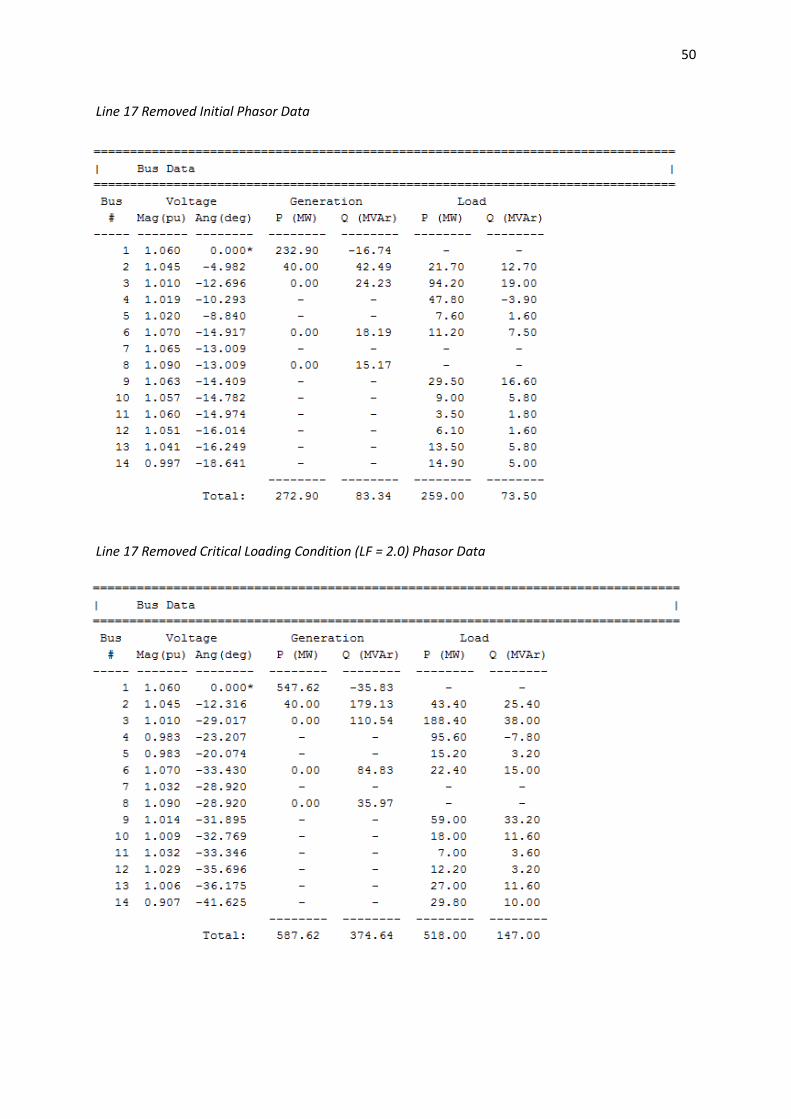
50
Line 17 Removed Initial Phasor Data
Line 17 Removed Critical Loading Condition (LF = 2.0) Phasor Data
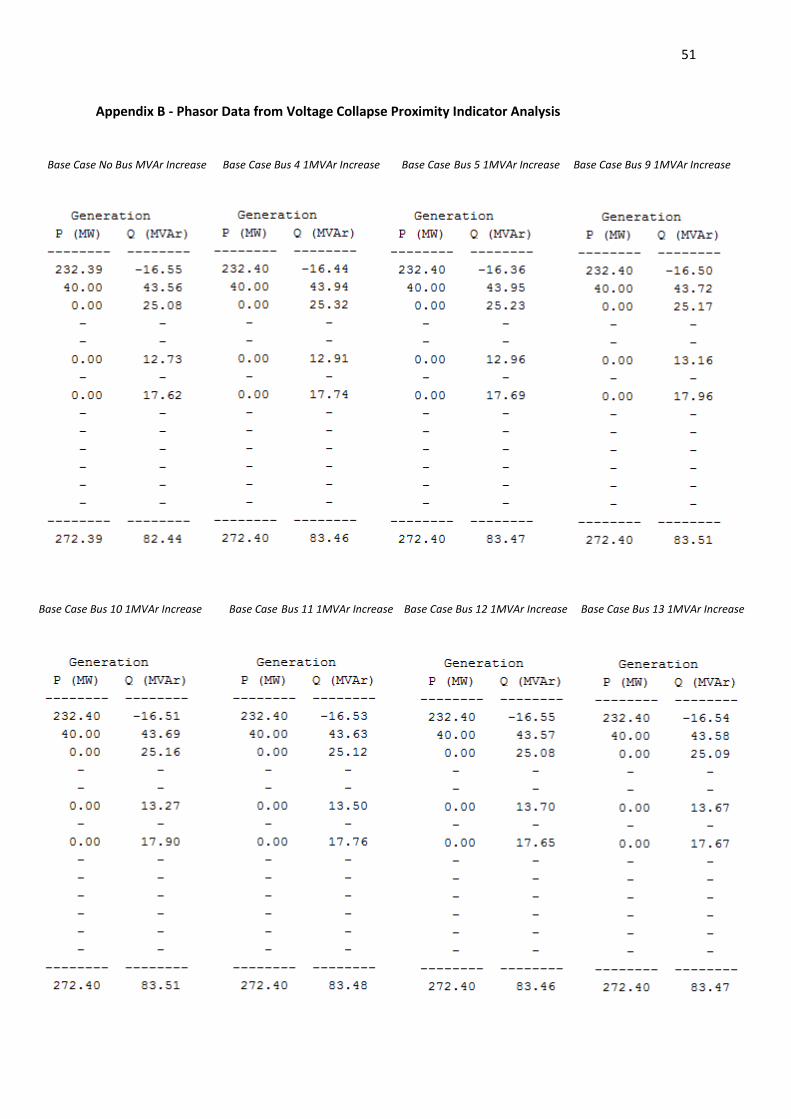
51
Appendix B - Phasor Data from Voltage Collapse Proximity Indicator Analysis
Base Case No Bus MVAr Increase Base Case Bus 4 1MVAr Increase Base Case Bus 5 1MVAr Increase Base Case Bus 9 1MVAr Increase
Base Case Bus 10 1MVAr Increase Base Case Bus 11 1MVAr Increase Base Case Bus 12 1MVAr Increase Base Case Bus 13 1MVAr Increase
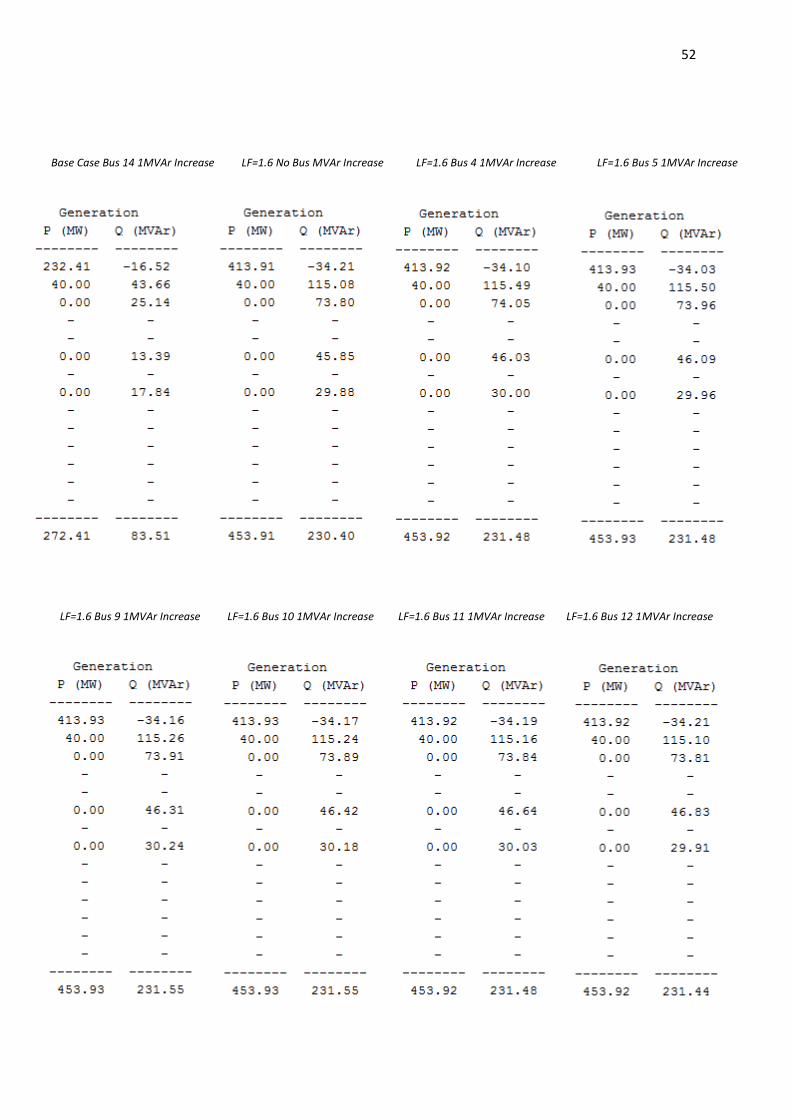
52
Base Case Bus 14 1MVAr Increase LF=1.6 No Bus MVAr Increase LF=1.6 Bus 4 1MVAr Increase LF=1.6 Bus 5 1MVAr Increase
LF=1.6 Bus 9 1MVAr Increase LF=1.6 Bus 10 1MVAr Increase LF=1.6 Bus 11 1MVAr Increase LF=1.6 Bus 12 1MVAr Increase
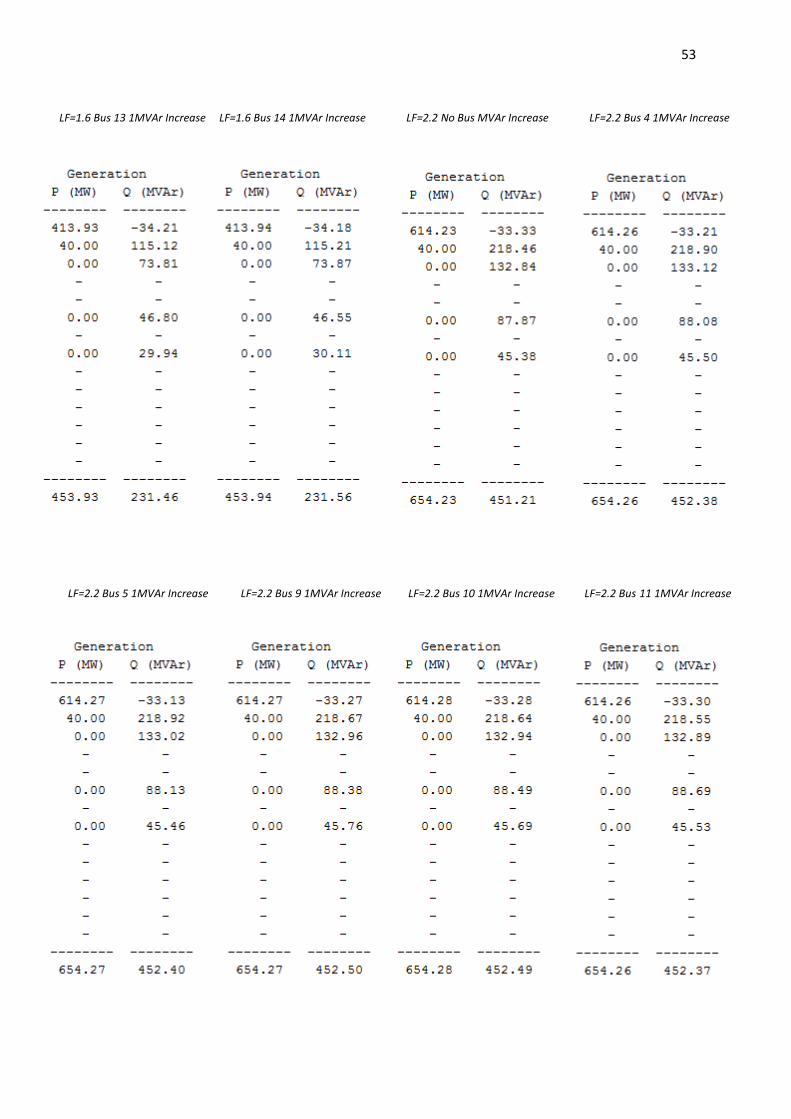
53
LF=1.6 Bus 13 1MVAr Increase LF=1.6 Bus 14 1MVAr Increase LF=2.2 No Bus MVAr Increase LF=2.2 Bus 4 1MVAr Increase
LF=2.2 Bus 5 1MVAr Increase LF=2.2 Bus 9 1MVAr Increase LF=2.2 Bus 10 1MVAr Increase LF=2.2 Bus 11 1MVAr Increase
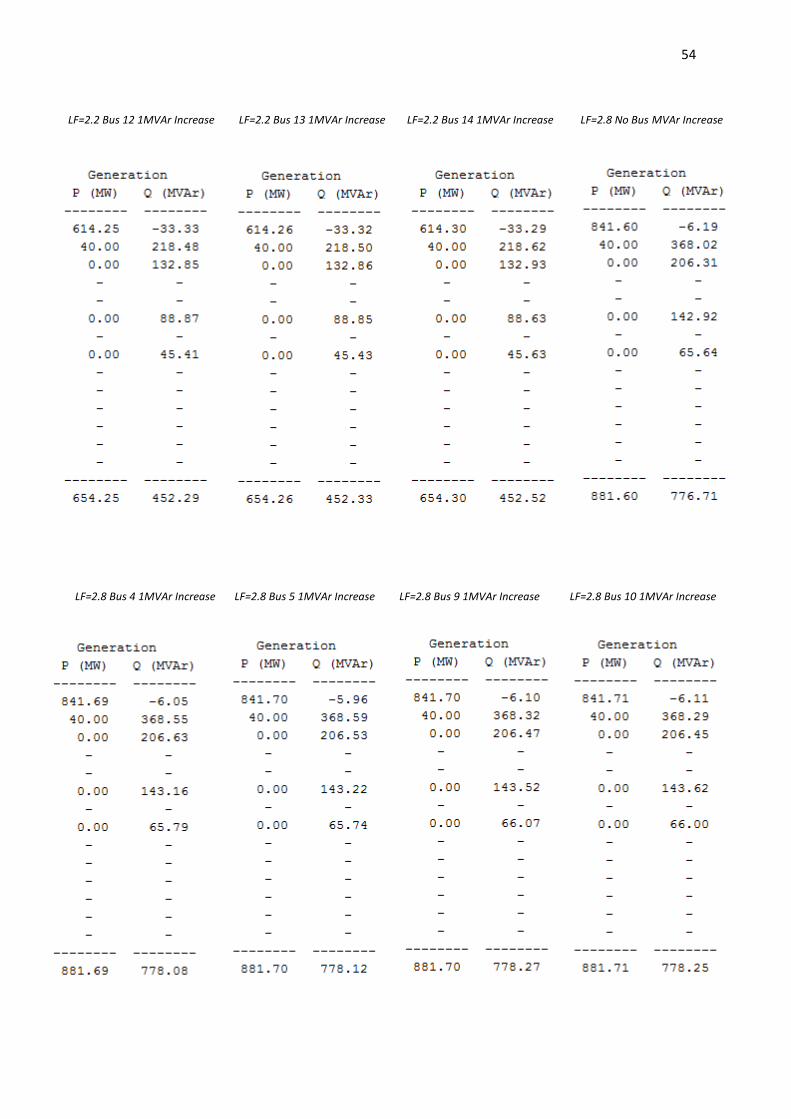
54
LF=2.2 Bus 12 1MVAr Increase LF=2.2 Bus 13 1MVAr Increase LF=2.2 Bus 14 1MVAr Increase LF=2.8 No Bus MVAr Increase
LF=2.8 Bus 4 1MVAr Increase LF=2.8 Bus 5 1MVAr Increase LF=2.8 Bus 9 1MVAr Increase LF=2.8 Bus 10 1MVAr Increase
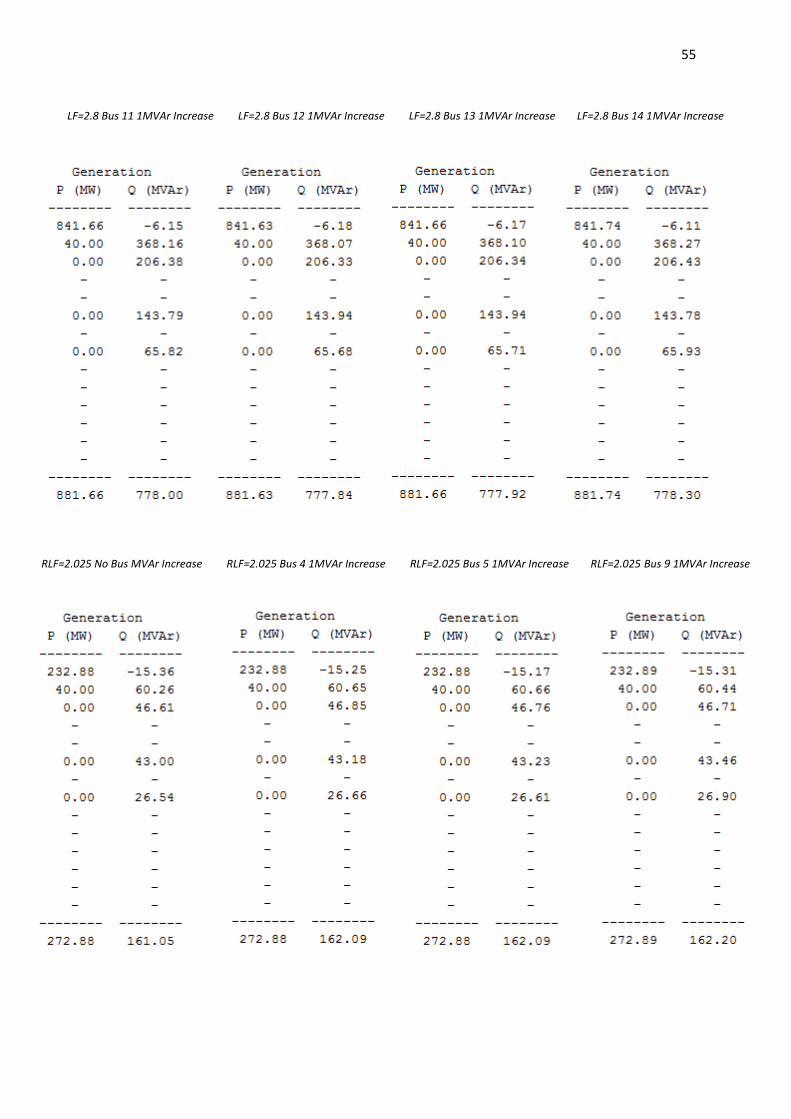
55
LF=2.8 Bus 11 1MVAr Increase LF=2.8 Bus 12 1MVAr Increase LF=2.8 Bus 13 1MVAr Increase LF=2.8 Bus 14 1MVAr Increase
RLF=2.025 No Bus MVAr Increase RLF=2.025 Bus 4 1MVAr Increase RLF=2.025 Bus 5 1MVAr Increase RLF=2.025 Bus 9 1MVAr Increase
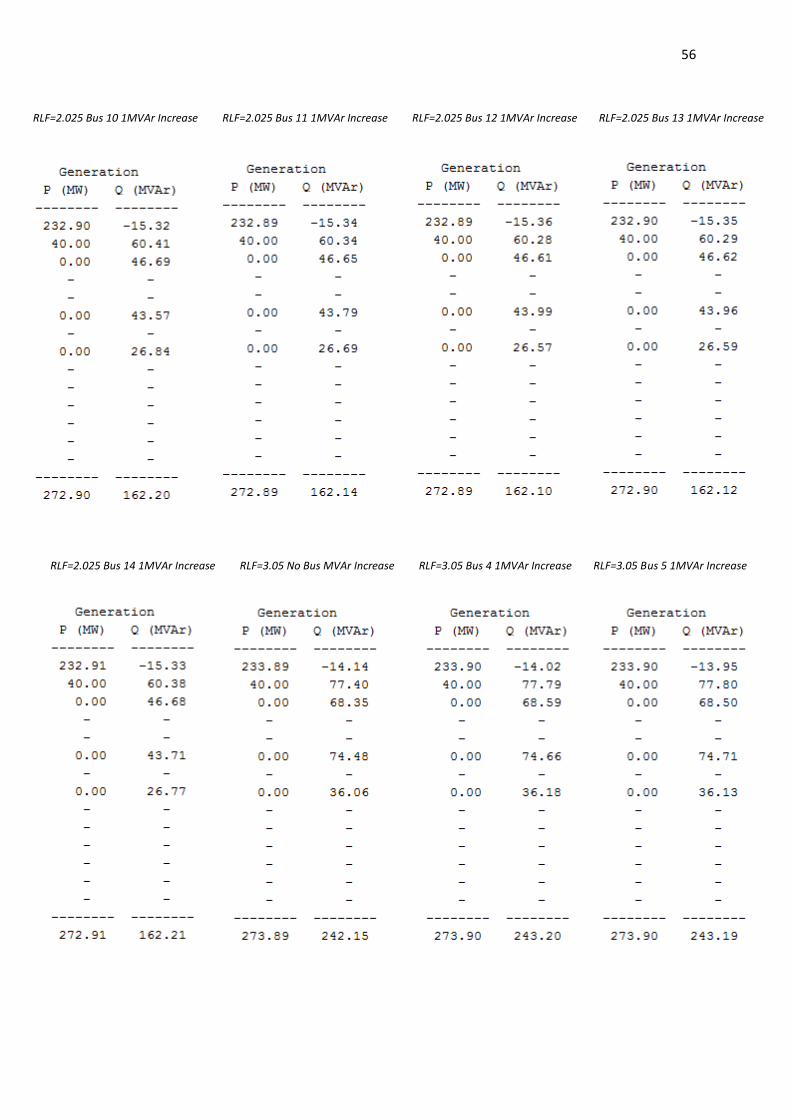
56
RLF=2.025 Bus 10 1MVAr Increase RLF=2.025 Bus 11 1MVAr Increase RLF=2.025 Bus 12 1MVAr Increase RLF=2.025 Bus 13 1MVAr Increase
RLF=2.025 Bus 14 1MVAr Increase RLF=3.05 No Bus MVAr Increase RLF=3.05 Bus 4 1MVAr Increase RLF=3.05 Bus 5 1MVAr Increase
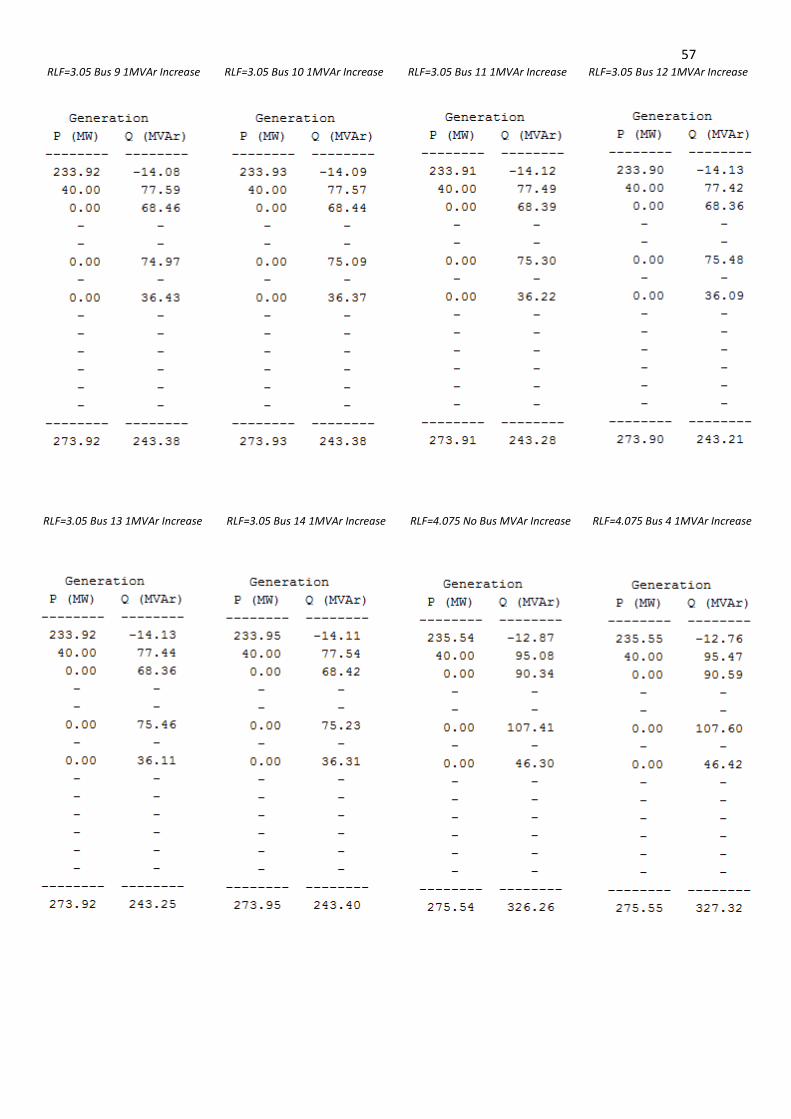
57
RLF=3.05 Bus 9 1MVAr Increase RLF=3.05 Bus 10 1MVAr Increase RLF=3.05 Bus 11 1MVAr Increase RLF=3.05 Bus 12 1MVAr Increase
RLF=3.05 Bus 13 1MVAr Increase RLF=3.05 Bus 14 1MVAr Increase RLF=4.075 No Bus MVAr Increase RLF=4.075 Bus 4 1MVAr Increase
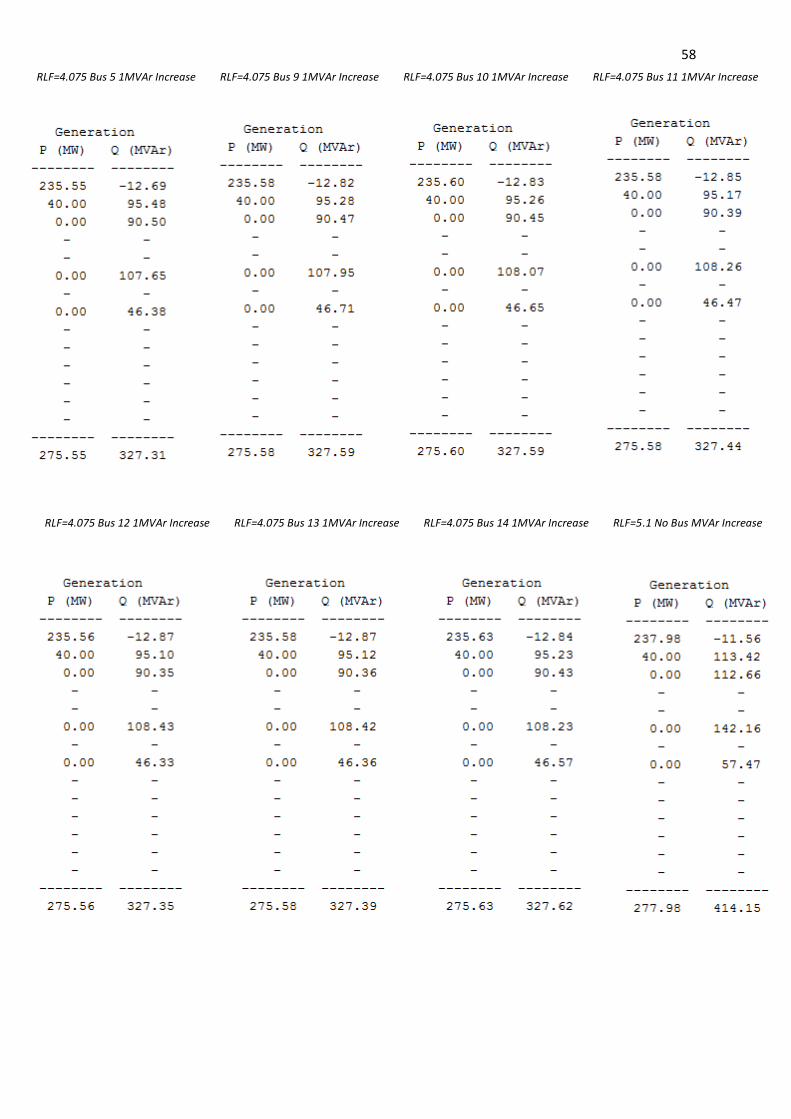
58
RLF=4.075 Bus 5 1MVAr Increase RLF=4.075 Bus 9 1MVAr Increase RLF=4.075 Bus 10 1MVAr Increase RLF=4.075 Bus 11 1MVAr Increase
RLF=4.075 Bus 12 1MVAr Increase RLF=4.075 Bus 13 1MVAr Increase RLF=4.075 Bus 14 1MVAr Increase RLF=5.1 No Bus MVAr Increase
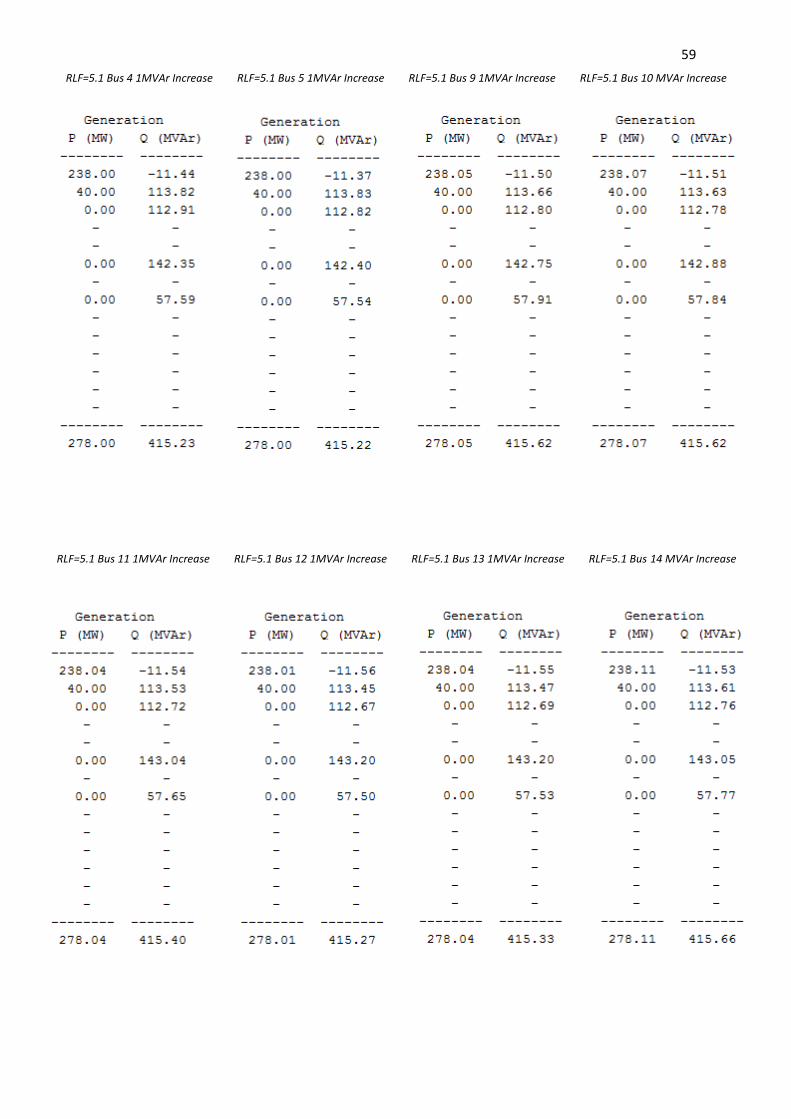
59
RLF=5.1 Bus 4 1MVAr Increase RLF=5.1 Bus 5 1MVAr Increase RLF=5.1 Bus 9 1MVAr Increase RLF=5.1 Bus 10 MVAr Increase
RLF=5.1 Bus 11 1MVAr Increase RLF=5.1 Bus 12 1MVAr Increase RLF=5.1 Bus 13 1MVAr Increase RLF=5.1 Bus 14 MVAr Increase
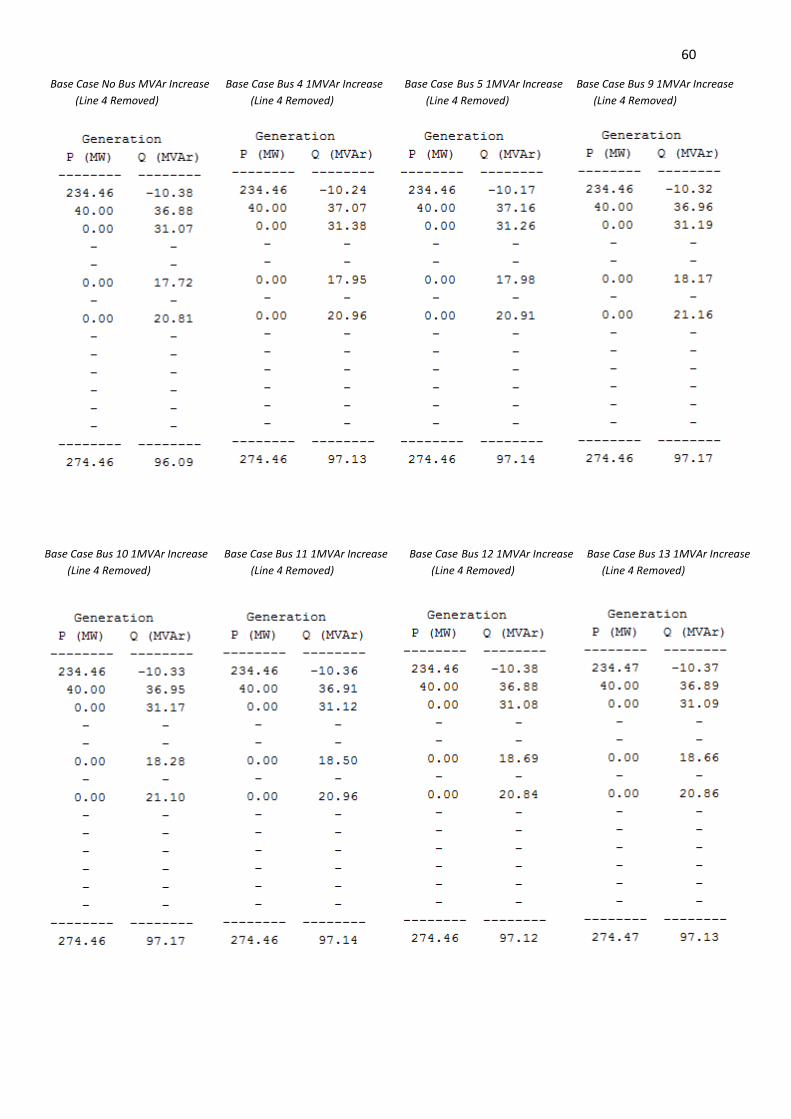
60
Base Case No Bus MVAr Increase Base Case Bus 4 1MVAr Increase Base Case Bus 5 1MVAr Increase Base Case Bus 9 1MVAr Increase
(Line 4 Removed) (Line 4 Removed) (Line 4 Removed) (Line 4 Removed)
Base Case Bus 10 1MVAr Increase Base Case Bus 11 1MVAr Increase Base Case Bus 12 1MVAr Increase Base Case Bus 13 1MVAr Increase
(Line 4 Removed) (Line 4 Removed) (Line 4 Removed) (Line 4 Removed)
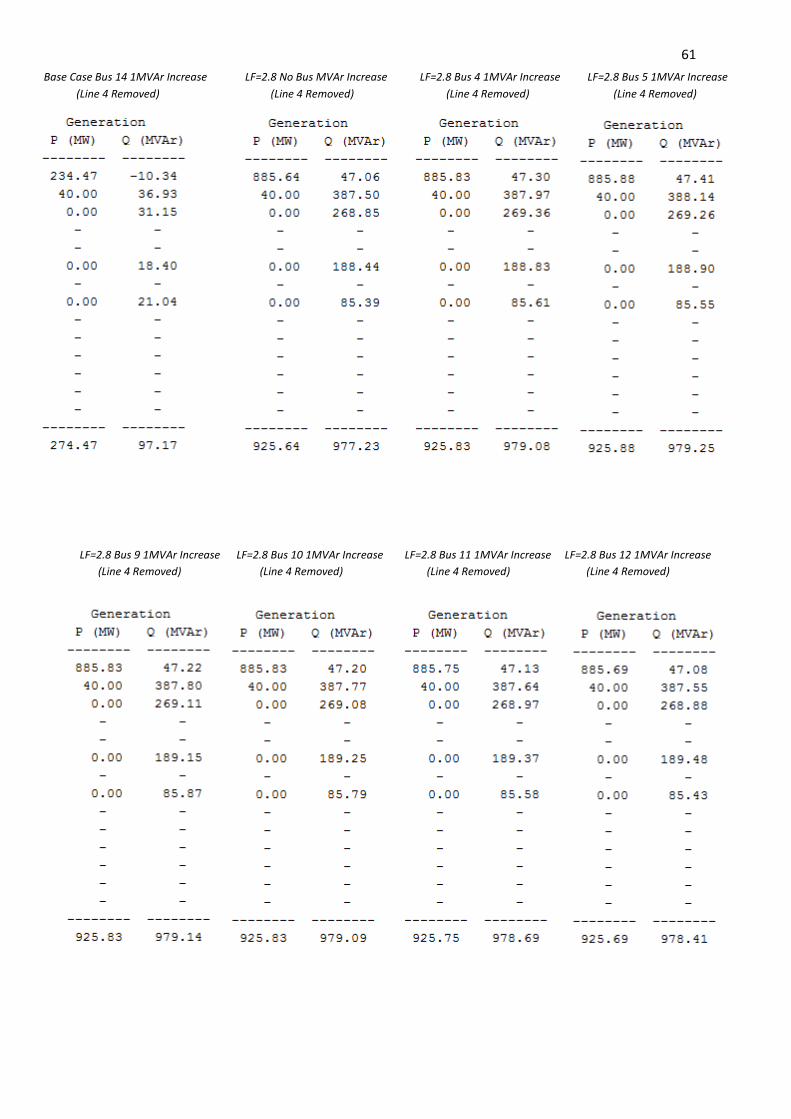
61
Base Case Bus 14 1MVAr Increase LF=2.8 No Bus MVAr Increase LF=2.8 Bus 4 1MVAr Increase LF=2.8 Bus 5 1MVAr Increase
(Line 4 Removed) (Line 4 Removed) (Line 4 Removed) (Line 4 Removed)
LF=2.8 Bus 9 1MVAr Increase LF=2.8 Bus 10 1MVAr Increase LF=2.8 Bus 11 1MVAr Increase LF=2.8 Bus 12 1MVAr Increase
(Line 4 Removed) (Line 4 Removed) (Line 4 Removed) (Line 4 Removed)
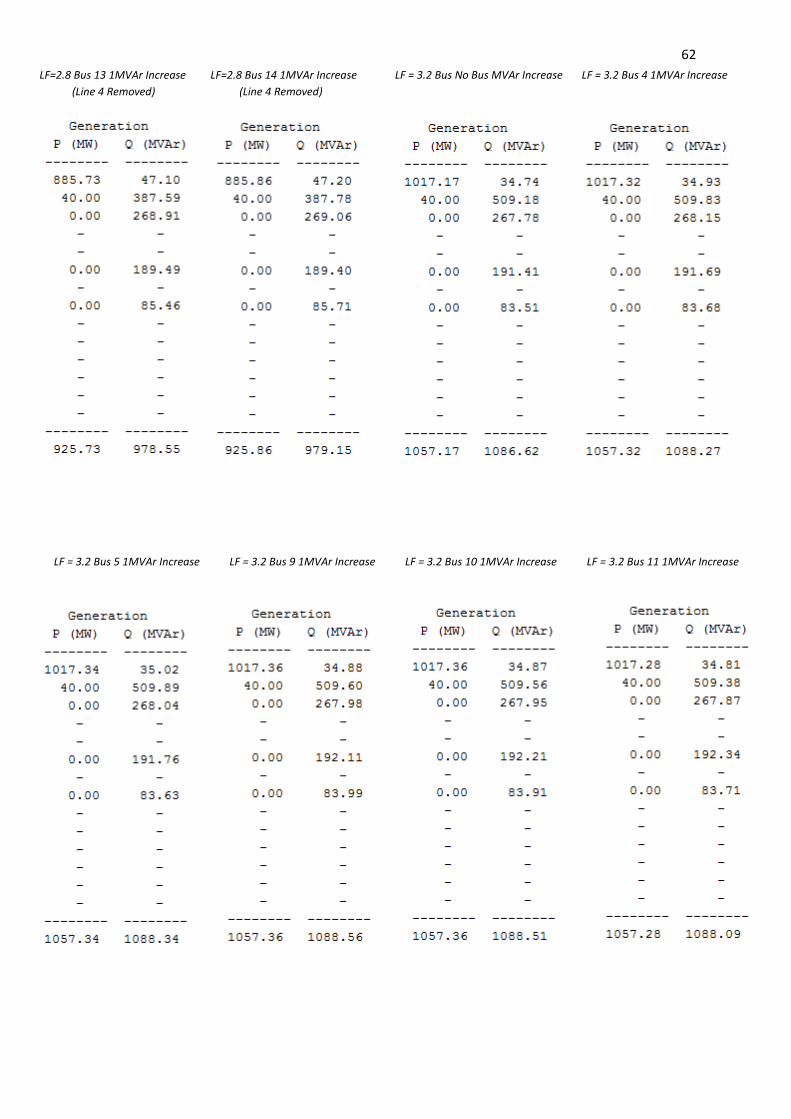
62
LF=2.8 Bus 13 1MVAr Increase LF=2.8 Bus 14 1MVAr Increase LF = 3.2 Bus No Bus MVAr Increase LF = 3.2 Bus 4 1MVAr Increase
(Line 4 Removed) (Line 4 Removed)
LF = 3.2 Bus 5 1MVAr Increase LF = 3.2 Bus 9 1MVAr Increase LF = 3.2 Bus 10 1MVAr Increase LF = 3.2 Bus 11 1MVAr Increase
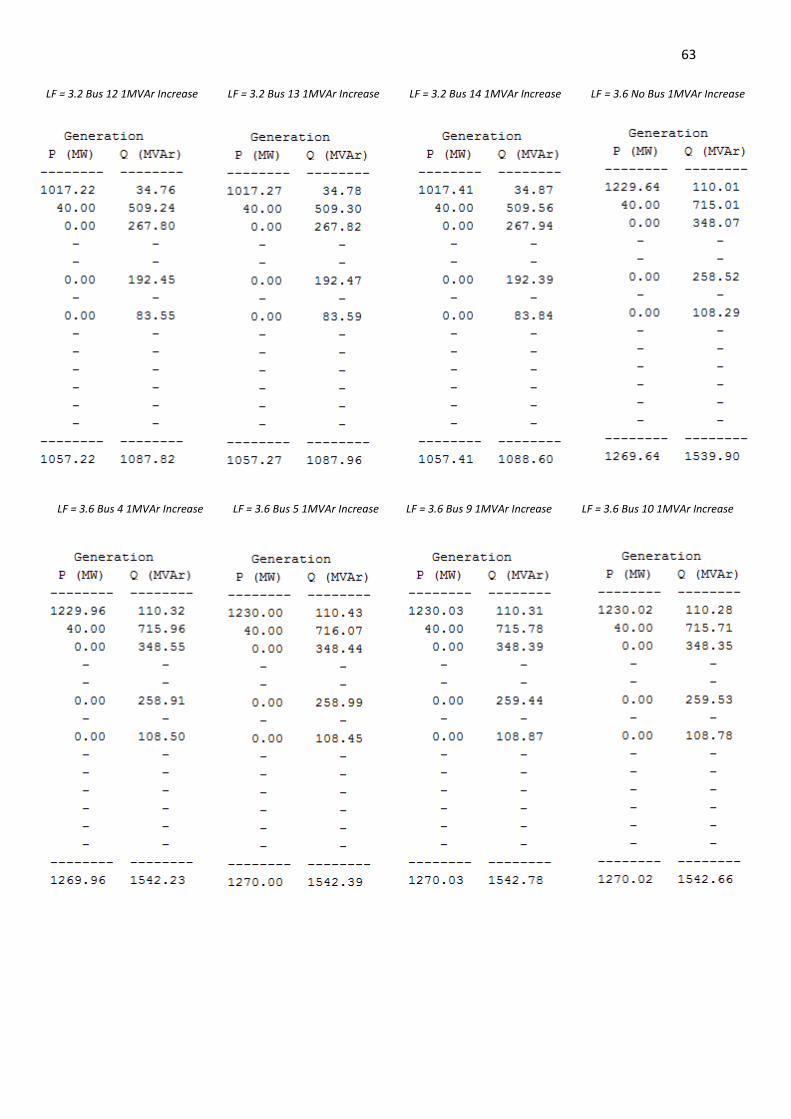
63
LF = 3.2 Bus 12 1MVAr Increase LF = 3.2 Bus 13 1MVAr Increase LF = 3.2 Bus 14 1MVAr Increase LF = 3.6 No Bus 1MVAr Increase
LF = 3.6 Bus 4 1MVAr Increase LF = 3.6 Bus 5 1MVAr Increase LF = 3.6 Bus 9 1MVAr Increase LF = 3.6 Bus 10 1MVAr Increase
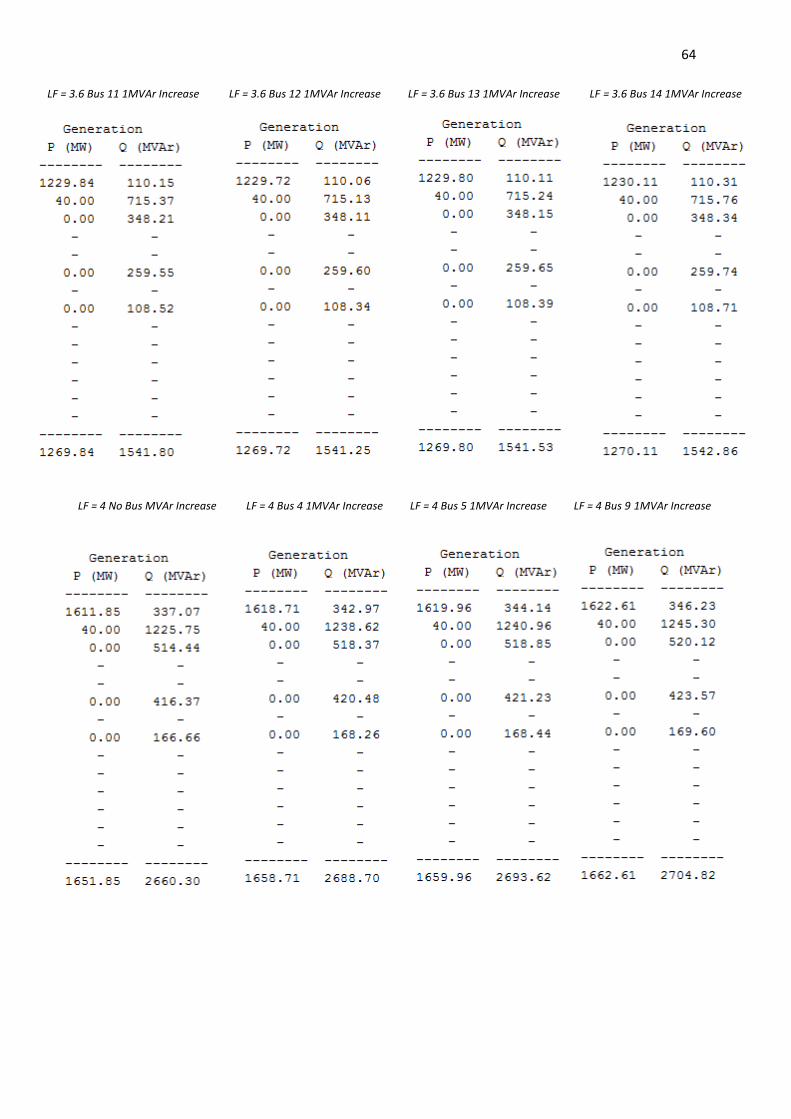
64
LF = 3.6 Bus 11 1MVAr Increase LF = 3.6 Bus 12 1MVAr Increase LF = 3.6 Bus 13 1MVAr Increase LF = 3.6 Bus 14 1MVAr Increase
LF = 4 No Bus MVAr Increase LF = 4 Bus 4 1MVAr Increase LF = 4 Bus 5 1MVAr Increase LF = 4 Bus 9 1MVAr Increase
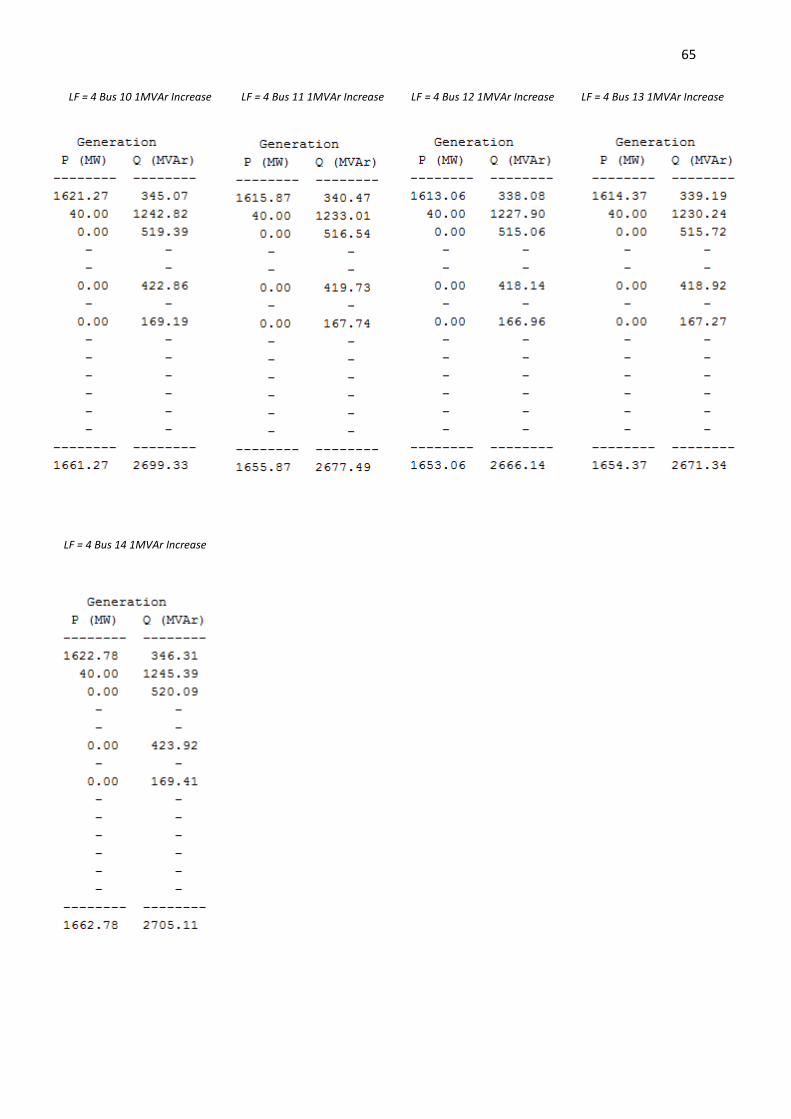
65
LF = 4 Bus 10 1MVAr Increase LF = 4 Bus 11 1MVAr Increase LF = 4 Bus 12 1MVAr Increase LF = 4 Bus 13 1MVAr Increase
LF = 4 Bus 14 1MVAr Increase
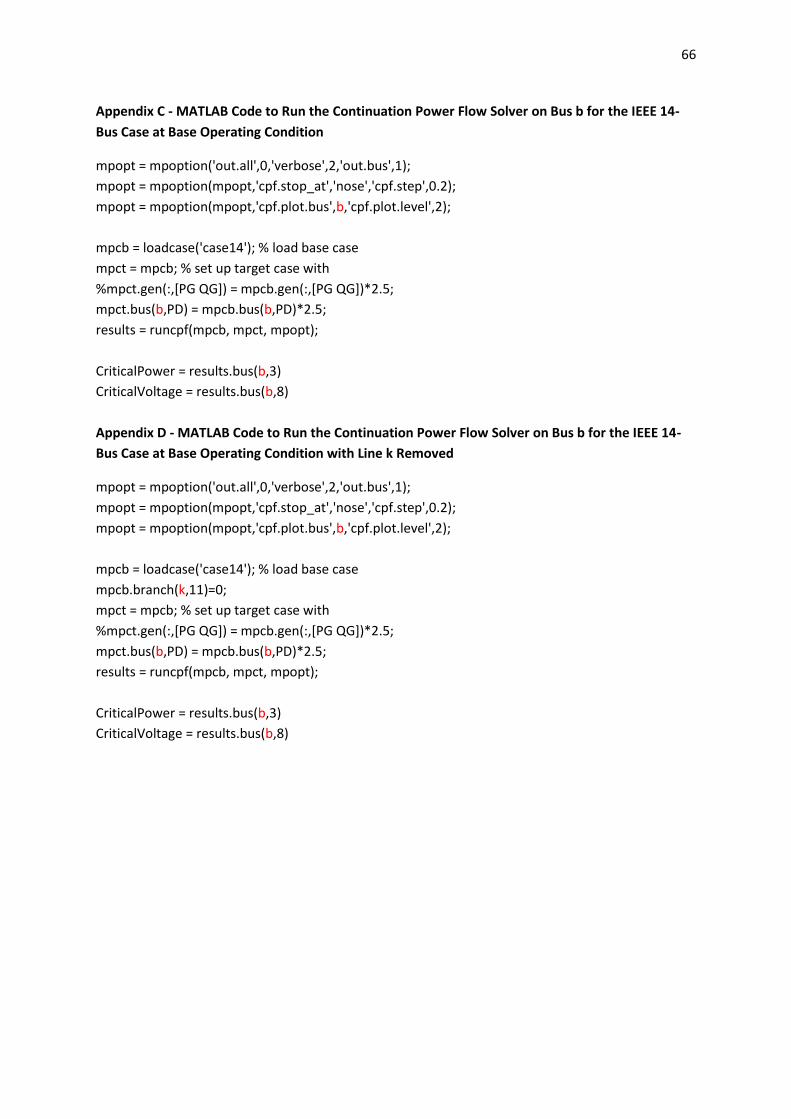
66
Appendix C - MATLAB Code to Run the Continuation Power Flow Solver on Bus b for the IEEE 14-
Bus Case at Base Operating Condition
mpopt = mpoption('out.all',0,'verbose',2,'out.bus',1);
mpopt = mpoption(mpopt,'cpf.stop_at','nose','cpf.step',0.2);
mpopt = mpoption(mpopt,'cpf.plot.bus',b,'cpf.plot.level',2);
mpcb = loadcase('case14'); % load base case
mpct = mpcb; % set up target case with
%mpct.gen(:,[PG QG]) = mpcb.gen(:,[PG QG])*2.5;
mpct.bus(b,PD) = mpcb.bus(b,PD)*2.5;
results = runcpf(mpcb, mpct, mpopt);
CriticalPower = results.bus(b,3)
CriticalVoltage = results.bus(b,8)
Appendix D - MATLAB Code to Run the Continuation Power Flow Solver on Bus b for the IEEE 14-
Bus Case at Base Operating Condition with Line k Removed
mpopt = mpoption('out.all',0,'verbose',2,'out.bus',1);
mpopt = mpoption(mpopt,'cpf.stop_at','nose','cpf.step',0.2);
mpopt = mpoption(mpopt,'cpf.plot.bus',b,'cpf.plot.level',2);
mpcb = loadcase('case14'); % load base case
mpcb.branch(k,11)=0;
mpct = mpcb; % set up target case with
%mpct.gen(:,[PG QG]) = mpcb.gen(:,[PG QG])*2.5;
mpct.bus(b,PD) = mpcb.bus(b,PD)*2.5;
results = runcpf(mpcb, mpct, mpopt);
CriticalPower = results.bus(b,3)
CriticalVoltage = results.bus(b,8)
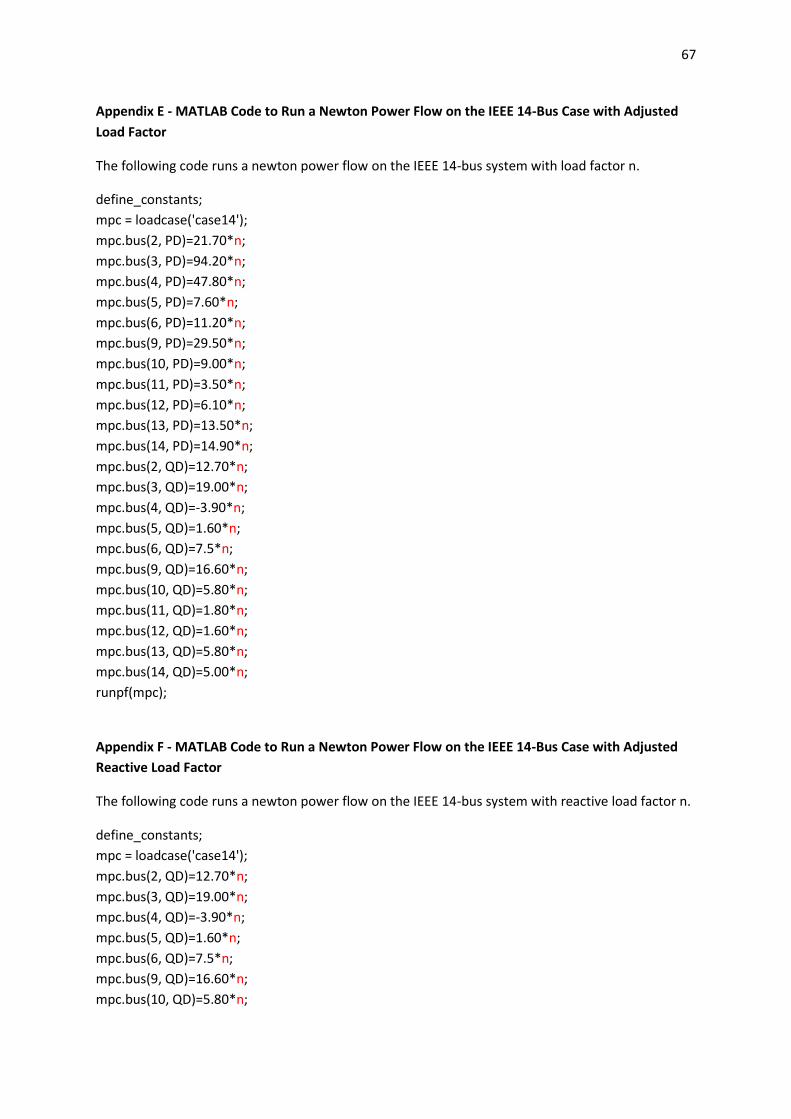
67
Appendix E - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Load Factor
The following code runs a newton power flow on the IEEE 14-bus system with load factor n.
define_constants;
mpc = loadcase('case14');
mpc.bus(2, PD)=21.70*n;
mpc.bus(3, PD)=94.20*n;
mpc.bus(4, PD)=47.80*n;
mpc.bus(5, PD)=7.60*n;
mpc.bus(6, PD)=11.20*n;
mpc.bus(9, PD)=29.50*n;
mpc.bus(10, PD)=9.00*n;
mpc.bus(11, PD)=3.50*n;
mpc.bus(12, PD)=6.10*n;
mpc.bus(13, PD)=13.50*n;
mpc.bus(14, PD)=14.90*n;
mpc.bus(2, QD)=12.70*n;
mpc.bus(3, QD)=19.00*n;
mpc.bus(4, QD)=-3.90*n;
mpc.bus(5, QD)=1.60*n;
mpc.bus(6, QD)=7.5*n;
mpc.bus(9, QD)=16.60*n;
mpc.bus(10, QD)=5.80*n;
mpc.bus(11, QD)=1.80*n;
mpc.bus(12, QD)=1.60*n;
mpc.bus(13, QD)=5.80*n;
mpc.bus(14, QD)=5.00*n;
runpf(mpc);
Appendix F - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Reactive Load Factor
The following code runs a newton power flow on the IEEE 14-bus system with reactive load factor n.
define_constants;
mpc = loadcase('case14');
mpc.bus(2, QD)=12.70*n;
mpc.bus(3, QD)=19.00*n;
mpc.bus(4, QD)=-3.90*n;
mpc.bus(5, QD)=1.60*n;
mpc.bus(6, QD)=7.5*n;
mpc.bus(9, QD)=16.60*n;
mpc.bus(10, QD)=5.80*n;
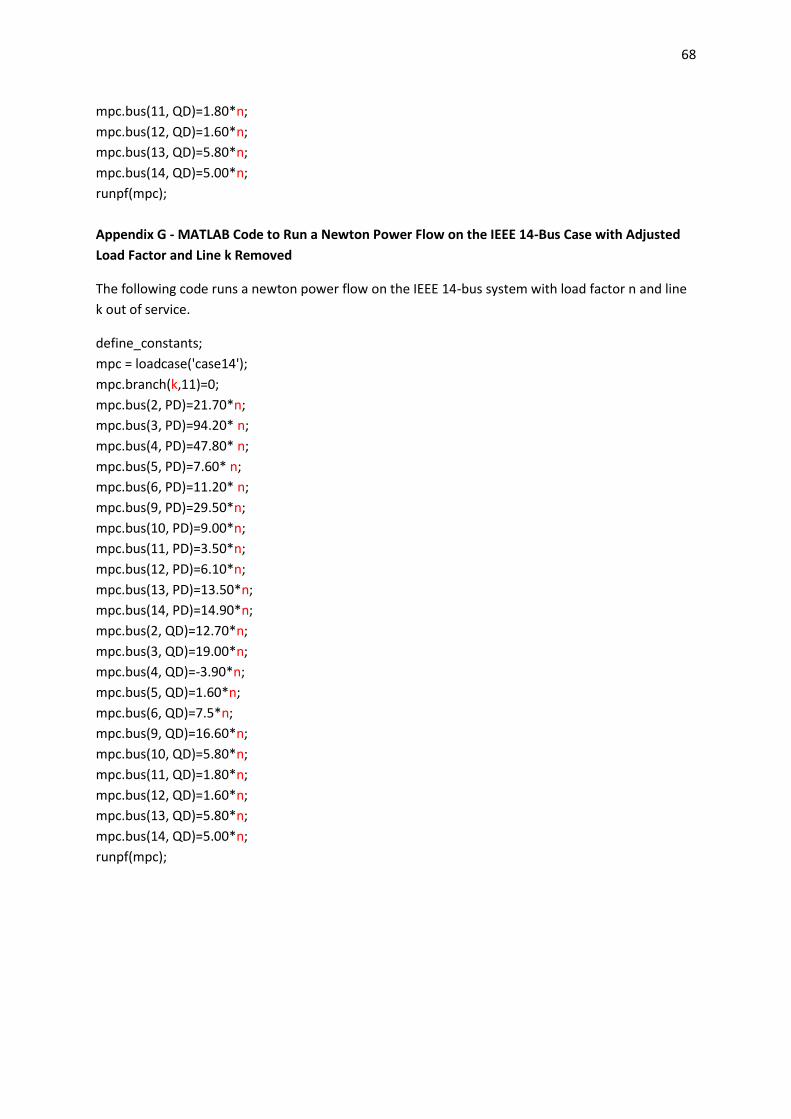
68
mpc.bus(11, QD)=1.80*n;
mpc.bus(12, QD)=1.60*n;
mpc.bus(13, QD)=5.80*n;
mpc.bus(14, QD)=5.00*n;
runpf(mpc);
Appendix G - MATLAB Code to Run a Newton Power Flow on the IEEE 14-Bus Case with Adjusted
Load Factor and Line k Removed
The following code runs a newton power flow on the IEEE 14-bus system with load factor n and line
k out of service.
define_constants;
mpc = loadcase('case14');
mpc.branch(k,11)=0;
mpc.bus(2, PD)=21.70*n;
mpc.bus(3, PD)=94.20* n;
mpc.bus(4, PD)=47.80* n;
mpc.bus(5, PD)=7.60* n;
mpc.bus(6, PD)=11.20* n;
mpc.bus(9, PD)=29.50*n;
mpc.bus(10, PD)=9.00*n;
mpc.bus(11, PD)=3.50*n;
mpc.bus(12, PD)=6.10*n;
mpc.bus(13, PD)=13.50*n;
mpc.bus(14, PD)=14.90*n;
mpc.bus(2, QD)=12.70*n;
mpc.bus(3, QD)=19.00*n;
mpc.bus(4, QD)=-3.90*n;
mpc.bus(5, QD)=1.60*n;
mpc.bus(6, QD)=7.5*n;
mpc.bus(9, QD)=16.60*n;
mpc.bus(10, QD)=5.80*n;
mpc.bus(11, QD)=1.80*n;
mpc.bus(12, QD)=1.60*n;
mpc.bus(13, QD)=5.80*n;
mpc.bus(14, QD)=5.00*n;
runpf(mpc);
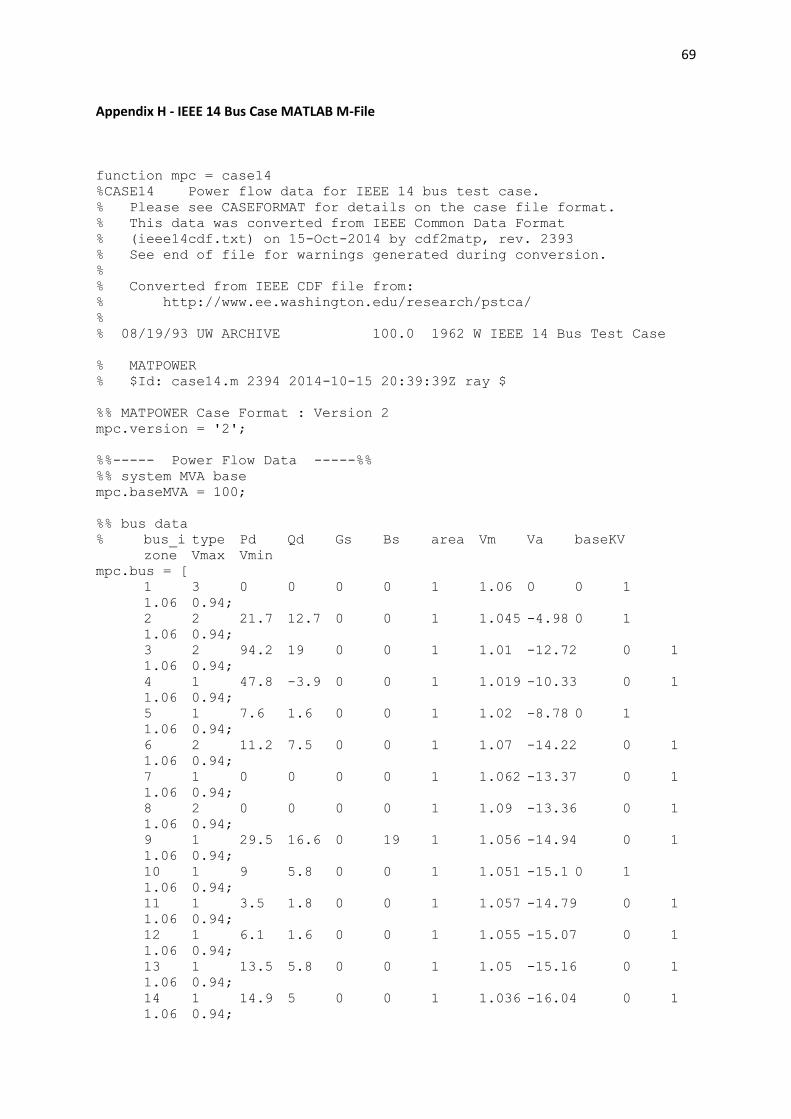
69
Appendix H - IEEE 14 Bus Case MATLAB M-File
function mpc = case14
%CASE14 Power flow data for IEEE 14 bus test case.
% Please see CASEFORMAT for details on the case file format.
% This data was converted from IEEE Common Data Format
% (ieee14cdf.txt) on 15-Oct-2014 by cdf2matp, rev. 2393
% See end of file for warnings generated during conversion.
%
% Converted from IEEE CDF file from:
% http://www.ee.washington.edu/research/pstca/
%
% 08/19/93 UW ARCHIVE 100.0 1962 W IEEE 14 Bus Test Case
% MATPOWER
% $Id: case14.m 2394 2014-10-15 20:39:39Z ray $
%% MATPOWER Case Format : Version 2
mpc.version = '2';
%%----- Power Flow Data -----%%
%% system MVA base
mpc.baseMVA = 100;
%% bus data
% bus_i type Pd Qd Gs Bs area Vm Va baseKV
zone Vmax Vmin
mpc.bus = [
1 3 0 0 0 0 1 1.06 0 0 1
1.06 0.94;
2 2 21.7 12.7 0 0 1 1.045 -4.98 0 1
1.06 0.94;
3 2 94.2 19 0 0 1 1.01 -12.72 0 1
1.06 0.94;
4 1 47.8 -3.9 0 0 1 1.019 -10.33 0 1
1.06 0.94;
5 1 7.6 1.6 0 0 1 1.02 -8.78 0 1
1.06 0.94;
6 2 11.2 7.5 0 0 1 1.07 -14.22 0 1
1.06 0.94;
7 1 0 0 0 0 1 1.062 -13.37 0 1
1.06 0.94;
8 2 0 0 0 0 1 1.09 -13.36 0 1
1.06 0.94;
9 1 29.5 16.6 0 19 1 1.056 -14.94 0 1
1.06 0.94;
10 1 9 5.8 0 0 1 1.051 -15.1 0 1
1.06 0.94;
11 1 3.5 1.8 0 0 1 1.057 -14.79 0 1
1.06 0.94;
12 1 6.1 1.6 0 0 1 1.055 -15.07 0 1
1.06 0.94;
13 1 13.5 5.8 0 0 1 1.05 -15.16 0 1
1.06 0.94;
14 1 14.9 5 0 0 1 1.036 -16.04 0 1
1.06 0.94;
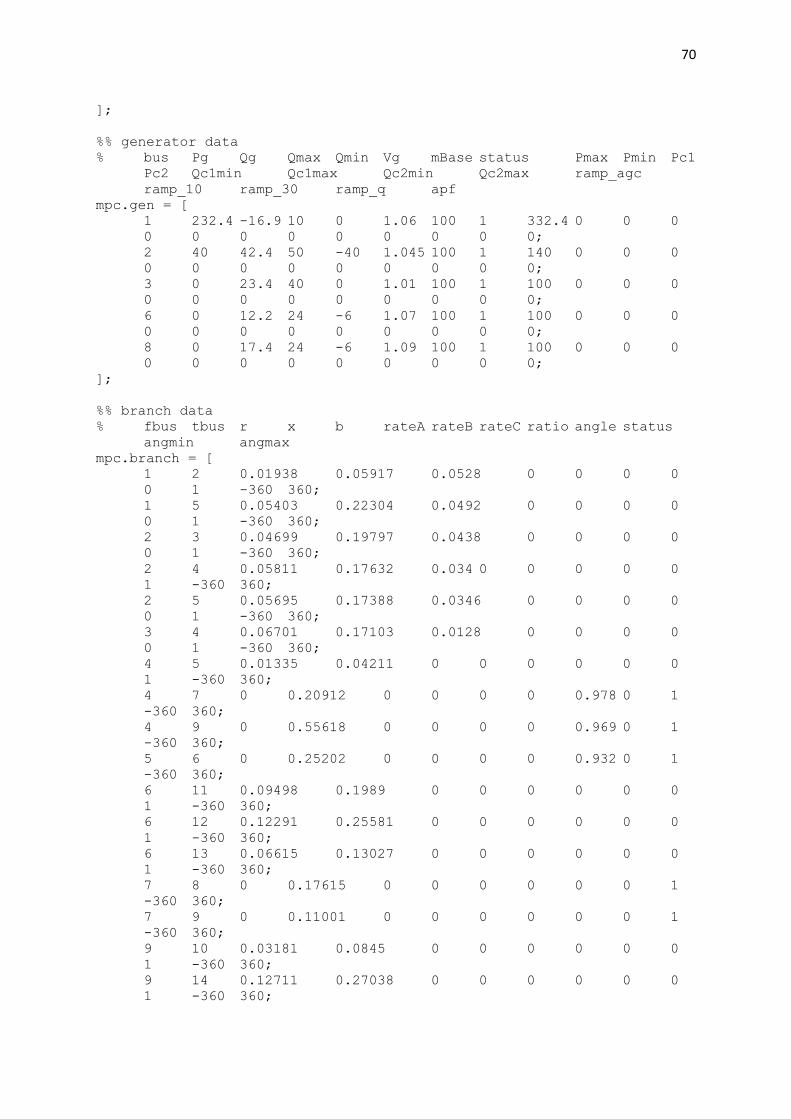
70
];
%% generator data
% bus Pg Qg Qmax Qmin Vg mBase status Pmax Pmin Pc1
Pc2 Qc1min Qc1max Qc2min Qc2max ramp_agc
ramp_10 ramp_30 ramp_q apf
mpc.gen = [
1 232.4 -16.9 10 0 1.06 100 1 332.4 0 0 0
0 0 0 0 0 0 0 0 0;
2 40 42.4 50 -40 1.045 100 1 140 0 0 0
0 0 0 0 0 0 0 0 0;
3 0 23.4 40 0 1.01 100 1 100 0 0 0
0 0 0 0 0 0 0 0 0;
6 0 12.2 24 -6 1.07 100 1 100 0 0 0
0 0 0 0 0 0 0 0 0;
8 0 17.4 24 -6 1.09 100 1 100 0 0 0
0 0 0 0 0 0 0 0 0;
];
%% branch data
% fbus tbus r x b rateA rateB rateC ratio angle status
angmin angmax
mpc.branch = [
1 2 0.01938 0.05917 0.0528 0 0 0 0
0 1 -360 360;
1 5 0.05403 0.22304 0.0492 0 0 0 0
0 1 -360 360;
2 3 0.04699 0.19797 0.0438 0 0 0 0
0 1 -360 360;
2 4 0.05811 0.17632 0.034 0 0 0 0 0
1 -360 360;
2 5 0.05695 0.17388 0.0346 0 0 0 0
0 1 -360 360;
3 4 0.06701 0.17103 0.0128 0 0 0 0
0 1 -360 360;
4 5 0.01335 0.04211 0 0 0 0 0 0
1 -360 360;
4 7 0 0.20912 0 0 0 0 0.978 0 1
-360 360;
4 9 0 0.55618 0 0 0 0 0.969 0 1
-360 360;
5 6 0 0.25202 0 0 0 0 0.932 0 1
-360 360;
6 11 0.09498 0.1989 0 0 0 0 0 0
1 -360 360;
6 12 0.12291 0.25581 0 0 0 0 0 0
1 -360 360;
6 13 0.06615 0.13027 0 0 0 0 0 0
1 -360 360;
7 8 0 0.17615 0 0 0 0 0 0 1
-360 360;
7 9 0 0.11001 0 0 0 0 0 0 1
-360 360;
9 10 0.03181 0.0845 0 0 0 0 0 0
1 -360 360;
9 14 0.12711 0.27038 0 0 0 0 0 0
1 -360 360;
71
10 11 0.08205 0.19207 0 0 0 0 0 0
1 -360 360;
12 13 0.22092 0.19988 0 0 0 0 0 0
1 -360 360;
13 14 0.17093 0.34802 0 0 0 0 0 0
1 -360 360;
];
%%----- OPF Data -----%%
%% generator cost data
% 1 startup shutdown n x1 y1 ... xn yn
% 2 startup shutdown n c(n-1) ... c0
mpc.gencost = [
2 0 0 3 0.0430292599 20 0;
2 0 0 3 0.25 20 0;
2 0 0 3 0.01 40 0;
2 0 0 3 0.01 40 0;
2 0 0 3 0.01 40 0;
];
%% bus names
mpc.bus_name = {
'Bus 1 HV';
'Bus 2 HV';
'Bus 3 HV';
'Bus 4 HV';
'Bus 5 HV';
'Bus 6 LV';
'Bus 7 ZV';
'Bus 8 TV';
'Bus 9 LV';
'Bus 10 LV';
'Bus 11 LV';
'Bus 12 LV';
'Bus 13 LV';
'Bus 14 LV';
};
% Warnings from cdf2matp conversion:
%
% ***** check the title format in the first line of the cdf file.
% ***** Qmax = Qmin at generator at bus 1 (Qmax set to Qmin + 10)
% ***** MVA limit of branch 1 - 2 not given, set to 0
% ***** MVA limit of branch 1 - 5 not given, set to 0
% ***** MVA limit of branch 2 - 3 not given, set to 0
% ***** MVA limit of branch 2 - 4 not given, set to 0
% ***** MVA limit of branch 2 - 5 not given, set to 0
% ***** MVA limit of branch 3 - 4 not given, set to 0
% ***** MVA limit of branch 4 - 5 not given, set to 0
% ***** MVA limit of branch 4 - 7 not given, set to 0
% ***** MVA limit of branch 4 - 9 not given, set to 0
% ***** MVA limit of branch 5 - 6 not given, set to 0
% ***** MVA limit of branch 6 - 11 not given, set to 0
% ***** MVA limit of branch 6 - 12 not given, set to 0
% ***** MVA limit of branch 6 - 13 not given, set to 0
% ***** MVA limit of branch 7 - 8 not given, set to 0
% ***** MVA limit of branch 7 - 9 not given, set to 0
% ***** MVA limit of branch 9 - 10 not given, set to 0

72
% ***** MVA limit of branch 9 - 14 not given, set to 0
% ***** MVA limit of branch 10 - 11 not given, set to 0
% ***** MVA limit of branch 12 - 13 not given, set to 0
% ***** MVA limit of branch 13 - 14 not given, set to 0




























