Embed Size (px)
Citation preview

Topology-Adaptive Modeling of Objects Using SurfaceEvolutions Based on 3D Mathematical Morphology
Kenji Hara,1 Hongbin Zha,2 and Tsutomu Hasegawa3
1Mechanics & Electronics Research Institute, Fukuoka Industrial Technology Center, Kitakyushu, 807-0831 Japan
2Center for Information Science, Peking University, Beijing, 100871 China
3Graduate School of Information Science and Electrical Engineering, Kyushu University, Fukuoka, 812-8581 Japan
SUMMARY
Level set methods were proposed mainly by mathe-maticians for constructing a model of a 3D object of arbi-t rary topology. However, those methods arecomputationally inefficient due to repeated distance trans-formations and increased dimensions. In the paper, wepropose a new method of modeling fast objects of arbitrarytopology by using a surface evolution approach based onmathematical morphology. Given sensor data covering thewhole object surface, the method begins with an initialapproximation of the object by evolving a closed surfaceinto a model topologically equivalent to the real object. Therefined approximation is then performed using energyminimization. The method has been applied in severalexperiments using range data, and the results are reportedin the paper. © 2002 Wiley Periodicals, Inc. Syst Comp Jpn,33(9): 58–67, 2002; Published online in Wiley InterScience(www.interscience.wiley.com). DOI 10.1002/scj.1152
Key words: topology-adaptive object modeling;mathematical morphology; level set method; surface evo-lution; pseudo curvature flow.
1. Introduction
Recently, many methods have been proposed forautomatic modeling of 3D free-form objects from mul-tiview range images [1]. The resulting models, however, areusually still large data sets comprising great amounts ofunorganized 3D points. To build a model base from whichit is easy to extract the significant features such as surfacenormals or orientations, we have to transform the datafurther into surface models describing explicitly how thosevertices are connected.
The framework of optimization based on deformablesurfaces was successfully used in the past for such objectmodeling [2–4]. Deformable surfaces have the ability togenerate smooth closed surfaces on the basis of the princi-ple of energy minimization. However, deformable surfaceshave a serious drawback in modeling multiobject scenes orobjects of arbitrary topology such as those with holes. Onemethod for overcoming this problem is to apply shapeevolution with blending [5]. However, while this methodcan allow the addition of a hole to the model, it cannothandle multiobject scenes adequately. On the other hand,topology-adaptive modeling method using a level set ap-proach has been presented [6]. This level set modelingmethod can model multiobject scenes or objects of arbitrarytopology by embedding an evolving surface (curve) as thezero level set of a function with a higher dimension [7, 8].
© 2002 Wiley Periodicals, Inc.
Systems and Computers in Japan, Vol. 33, No. 9, 2002Translated from Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J84-D-II, No. 5, May 2001, pp. 778–788
58

However, this modeling method is computationally ineffi-cient since it requires repeated distance transformations andincreased dimensions.
In the paper, we propose a new fast method of topol-ogy-adaptive modeling by a surface evolution approachmainly based on 3D mathematical morphology. Mathe-matical morphology usually treats binary or gray scaleimages, and operates on them by morphological transfor-mations using structuring elements [9]. This paper regardsmathematical morphology as the dynamic model governingthe 3D surface evolution, and then evolves surfaces byrepeated morphology operations. It is well known thatmathematical-morphology transformation based on a sin-gle dilation of a shape with a convex structuring elementinduces a differential deformation [10]. Thus, by introduc-ing the curvature-dependent structuring elements, we canattain approximately but fast the surface deformations in-troduced in the level set approach, that is, curvature-de-pendent flow.
First, by dilating every data point with a ball structur-ing element, we build a connected region, and then defineit as the stopping region in which any surface point attainszero speed. Moreover, we set a volume including the whole3D data, and then define the set of voxels lying on itsboundary as the initial closed surface. In this paper, thesurfaces are mainly represented by sets of the voxels inter-connecting compactly. Next, we perform erosion transfor-mation of the volume with a ball structuring element, andthen extract the boundary of the transformed volume. Thisshrinking and splitting process is repeated until no surfacepoint moves in the stopping region. Here, to keep thesmoothness of the surface during its evolution, we use astructuring element with curvature-dependent size. Afterthat, we extract the external boundary of the stopping regionon the basis of the resulting surface, and then performerosion along this boundary with the structuring elementused in building the stopping region. By this updating ofthe stopping region, we shrink the surface further. We builda surface model based on mesh representation by viewingthe surface as a set of hexahedra and then extracting thoseexternal squares.
After the above rough estimation, by solving theoptimal positions of those vertices on the basis of theprinciple of energy minimization, the resulting model isrefined. The method has been applied in several experi-ments using synthetic and real images, and the results arereported in the paper.
2. Level Set Methods
Given an initial 3D closed surface Γ(t = 0), we nowderive a level-set formulation of the motion equations of thesurface Γ(t) moving along its normal directions with speed
F. Here F can be a function of variables such as curvaturesand normal directions [8]. The main idea of the level setmethod is to embed this moving surface Γ(t) as the zerolevel set of a higher-dimensional function u = φ(x, y, z, t).Let φ(x, t = 0), where x = (x, y, z), be defined by
where d is the distance from x to Γ(t = 0), and the plus(minus) sign is chosen if the point x is outside (inside)Γ(t = 0). The stipulation that the zero level set of the func-tion φ must always match the moving surface means that
By the chain rule, we get
The above equation is called the level set equation.One of the most desirable aspects of the level set
formulation is that it allows the tracking of surfaces even asthey undergo topological changes during evolution, asshown in Fig. 1.
Malladi and colleagues proposed a method of extract-ing multiple contours from 2D images using the level setscheme [6]. They utilized a curve evolving at a curvature-dependent speed
where ε is a positive constant and κ is the curvature.The problem here is how to define a speed function
from the image data that serve as a halting criterion for this
(1)
(2)
(3)
Fig. 1. Curve evolution in a level set method.
(4)
59

speed function. Thus, by multiplying the above speed func-tion by the filter
we obtain the new image-based speed
where Gσ ∗ I denotes the image convolved with a Gaussiansmoothing filter whose characteristic width is σ. The term∇Gσ ∗ I is essentially zero except where the image gradientchanges rapidly, in which case the value becomes large. Thefilter kI(x, y) is close to unity away from boundaries, anddrops to zero near sharp changes in the image gradient,namely, in the stopping region. Thus, kI(x, y) serves toprevent the moving curve from passing out of the regionswithin which the original curves have to be constrained. Toextend the above 2D modeling approach stated earlier to 3Dmodeling, one defines the level set equation asu = φ(x, y, z, t).
However, this level set 3D modeling method hassome difficulties, as follows. To determine the speed func-tion F in the original method, searching for the closestsurface points over the entire computational domain re-quires O(N5) operations in 3D space, if we assume that thereare N discretizing cells in each coordinate direction, plusapproximately O(N2) points on the surfaces. As an alterna-tive, one can also perform searching only in a neighborhoodof the zero level set; this is known as a narrow-band algo-rithm [12]. In this case, the operation count in 3D spacedrops to O(kN2), where k is the number of cells in the narrowband. One of the other fast level set schemes is to apply anadaptive mesh in which each voxel has a size dependent onthe curvature [13]. So far as we know, the fastest level setmethod is the fast marching method, which is a numericaltechnique for solving the eikonal equation (7). The compu-tational cost is O(n2 log n), where n is the number of pointsin each coordinate direction. However, this method is notcomputationally efficient yet. Thus, in this paper, we pre-sent a new method of modeling objects of arbitrary topol-ogy by using a morphology-based surface evolution.
3. Morphology-Based Surface Evolution
To apply the surface evolution approach to topology-adaptive object modeling, we require that the surface retainsmoothness and avoid self-intersection during its evolution.Though the level set approach satisfies these conditions,this method is computationally inefficient due to the dis-tance transformations and the increased dimensions. In thesection, we give a brief overview of the fast surface evolu-tion approach in fitting closed surfaces to 3D data.
3.1. Mathematical morphology and surfaceevolution
Kimia and colleagues have shown that surface evolu-tions generated by 3D mathematical morphology opera-tions are equivalent to those governed by a partialdifferential equation [10, 11].
For a ball structuring element, B, the set nB, where nis a positive integer, is defined as
where 8 represents the dilation operator of 3D mathemati-cal morphology. Here, if B is convex, nB is the same shapeas B and n times as large as B. A single dilation with astructuring element nB is equivalent to n repeated dilationswith B,
which uses the distribution law in the dilation operation.Equation (8) shows that for a single operation with a convexstructuring element, this operation can be decomposed as asequence of n operations with the same structuring elementbut of size equal to 1/n of the original. In the limit asn → ∞, this morphology-based deformation can be viewedas a differential equation.
On the other hand, the morphological transformationfrom a region S of 3D space to S′ can be regarded asdeformation from its boundary ∂S of S to ∂S′. In this paper,these boundaries are approximately described by sets ofconnected voxels. In object modeling, however, these setsof the points must be transformed to surface models bypostprocessing.
Now, let a shape S evolve by dilation (erosion) witha convex structuring element of size λ. Here, we assumethat a point p on the surface ∂S moves a distance Γ(p, t, λ)along the outward normal. Then, since Γ(p, t, 0) = 0, thespeed F in the outward normal direction is represented as
It has been shown that dilation (erosion) operations can beregarded as surface evolutions governed by a partial differ-ential equation expressed by Eq. (9). It is well known thatthe amount β(p, t) of differential deformation is the maxi-mal projection of B onto the normal of ∂S at p [10]. For
(6)
(7)
(8)
(9)
(5)
60

example, for a unit ball structuring element B, we have theevolution equation (9) in the form
This is the equation of a surface evolving at a constant speedalong the normal.
Differential equation (9) has been derived on theassumption that the surface ∂S is smooth at point p; other-wise, even if p is a discontinuity, we can obtain the solutionof Eq. (9) by using the level set method. It is known thatthis solution is equal to the above surface deformation bydilations (or erosions) [11].
3.2. Pseudo curvature flow
The surface driven by Eq. (10) easily develops singu-larities during its evolution [Fig. 2(a)], and it cannot neces-sarily be applied to object modeling. In this subsection, wedefine the surface evolving while preserving smoothnessand developing no self-intersections as a solution satisfyingthe equation in which Eq. (4) is extended to three dimen-sions. Differing from the level set approach [6, 8], thisevolving surface can be traced at small computational costwithout increased dimensions and repeated search for theclosest points.
In the paper, we let the closed surface smoothlycontract and split by repeated erosions with a variable-sizeball structuring element, and then apply this surface evolu-tion approach to object modeling. The radius λ of the ballis defined as
where max (⋅, 0) is a representation introduced to prevent λfrom being negative. λ0 and ε′ are positive integral andpositive real constants, respectively. K = K(p, t) is theconvexity of the surface, introduced instead of noise-sensi-tive 3D curvatures, and therefore, the second term of Eq.(11) can be regarded as a smoothing term. K is defined asthe volume rate of the region outside the surface in theneighborhood of p, and thus it is defined as
where α = α(p, t) and β = β(p, t) are the numbers of insideand outside cells, respectively, within a distance ρ from p(Fig. 3).
In the above surface evolution process, the surfacesmoothness is preserved as the mean-curvature flow de-fined in Eq. (4) [Fig. 2(b)], and therefore, we call it pseudocurvature flow. When dilations are used, Eq. (11) is re-placed by λ = max (λ0 – ε′K, 0).
Here, we discuss pseudo curvature flow from theviewpoint of computational expense. There are approxi-mately O(n2) voxels in the evolving surface, assuming thatthere are n voxels in each coordinate direction. First, todetermine the size λ of the structuring element for thesevoxels, the approximate value K of the mean curvature mustbe calculated. However, it only takes values equal to theweighted sum of neighboring voxels. Next, we must calcu-late the region to be eroded for each voxel in the surface.We prepare a set of several ball structuring elements ofdifferent sizes as
where B is the ball structuring element of unit size and λ0
is the positive integer in Eq. (11). After that, we take thestructuring element from G which has the size of theintegral part of λ obtained by Eq. (11). If the integral partof λ is larger than 2λ0, the structuring element of the sizeof 2λ0 is selected. Consequently, it is obvious that pseudocurvature flow results in a time complexity of O(n2).
4. Topology-Adaptive Modeling by SurfaceEvolution
One of the difficulties arising in modeling 3D objectsfrom range data by the surface evolution approach is deter-mining how to halt the evolving surface at the objectsurface. In our strategy, we define the region in which anysurface point halts moving, and therefore, a rough buttopologically correct model can be obtained by surface
Fig. 2. Surface evolution using size-variable structuringelement.
(11)
Fig. 3. Amount of surface convexity.
(13)
(10)
(12)
61

evolution based on pseudo curvature flow; we then refinethis model by energy minimization. In this section, we givean overview of this topology-adaptive object modelingmethod based on both surface evolution and the conven-tional deformable surface.
4.1. Topology-adaptive modeling algorithm
The algorithm we developed consists of a two-phaseprocedure. First, by dilating a given set of 3D image data[Fig. 4(a)] with the ball structuring element of size δ, webuild a connected region [Fig. 4(b)]. This region is calledthe stopping region, in which any surface point halts mov-ing. Next, we set a single closed surface surrounding thewhole body of data as the initial shape, and then repeat theprocesses of shrinking and splitting by the pseudo curvatureflow until every surface point stops moving near the borderof the stopping region [Fig. 4(c)]. After that, we separatethe surface of the stopping region into the boundary surfacelying inside the object (internal boundary surface) and theother surface (external boundary surface) on the basis of theresulting surface. We also erode the stopping region alongthe external boundary surface with a ball structuring ele-ment of size δ, which updates the stopping region [Fig.4(d)]. Within this stopping region, we shrink the surfaceagain until it does not evolve further [Fig. 4(e)]. We build asurface model based on a mesh representation by viewingthe surface as a set of hexahedra and then extracting thoseexternal squares. The above step for initial estimation cor-responds to the first stage.
At the second stage, the surface model resulting fromthe above step is refined for the purpose of improving its
accuracy. The optimal positions of those vertices are calcu-lated based on the energy minimization principle [Fig. 4(f)].Further details are described below.
4.2. Initial estimation
Given a set of 3D image data, our goal here is toestimate a topologically correct model by surface evolutionbased on pseudo curvature flow. We expand every data pointinto a ball with radius δ by eroding it with a ball structuringelement δB of size δ. If δ is sufficiently large, the expandeddata points are connected with each other. However, inap-propriate selection of the δ values causes a failure in mod-eling due to the topologically wrong stopping regions. Thestopping regions resulting from too large δ and small δ areillustrated in Figs. 5(c) and 5(d), respectively. It is seen thatboth are topologically wrong. We determine the δ value asfollows.
We first build a stopping region with comparativelylarge δ, and then extract the voxels of its boundary. Afterthat, we repeat the process consisting of decreasing δ andextracting the border surface of the stopping region untilthe stopping region is regarded as being topologicallyequivalent to the object surface, and thus obtain the esti-mated value of δ [Fig. 5(b)]. Here, as a criterion for thetopology judgment, we introduce the detection rate
where Nr is the number of data points having model pointswithin a distance δ, and N is the total number of data points.
Fig. 4. Outline of our algorithm.
(14)
62

Here, if q is smaller than a threshold th, δ is lowered, sinceit is inferred that the current model is wrong in its topology.
From the above step, a set of discrete data is trans-formed into the stopping region X, which is between theexternal border surface and the internal one, and X isrepresented as
where L is a set of data points.Next, we set a single closed surface surrounding the
whole body of data as the initial shape. Then, we shrink andsplit this surface by repeated erosions with the variable-sizeball structuring element λB until every surface point stopsmoving (Fig. 6). Here, the radius λ = λ(p, t) of the ballstructuring element centered on a point p of the evolvingsurface at time t is defined by modifying Eq. (11) as
where λ0 and ε′ are the same positive constants as those usedin Eq. (11). K = K(p, t) is the amount of convexity of thesurface defined in Eq. (12). Equation (16) states that p isnot moved if λ0 + ε′K is negative or p lies in X, and thus,the surface stops evolving so that the object is covered bythe surface [Fig. 6(d)]. After that, we extract the externalboundary surface of the stopping region X by checkingwhether each voxel of the boundary surface of the stoppingregion lies outside this surface or not. Moreover, we erodeX along this external boundary surface with the structuringelement δB used earlier. By restarting surface evolution
with this corrected stopping region, we can obtain a surfacestopping near the surface of the object.
However, the resulting model is still a set of voxels,and thus, it is not a surface model explicitly describing howthe vertices are connected. To transform the set of voxelsinto a polygonal mesh, we regard the surface as a set ofhexahedra, and then extract their external squares. In addi-tion, we can decrease the number of patches by dividing the3D space into larger sections.
4.3. Model refinement
This stage is employed mainly to enhance the accu-racy of modeling by removing local irregularities resultingfrom the earlier evolution. The current surface model pro-vides a reasonable approximation to the object surface inthe topology. Moreover, it has a comparatively smoothshape owing to the smoothing effect of pseudo curvatureflow. Therefore, we can apply conventional deformablesurface techniques to this model [2–4].
For the set v of position vectors of the vertices, theenergy function to be minimized can be expressed by
Eint(v) corresponds to a smoothness constraint based onsprings imaginarily placed between neighboring vertices.Eest(v) is a data closeness term based on springs placedbetween the vertices and their nearest data points [3].Equation (17) can be minimized fast using a greedy algo-rithm [14]. As a result, we can obtain the optimum meshfitted to 3D data.
5. Experimental Results
In this section, we present the results of some experi-ments using synthetic range data and real data acquired bya laser range finder.
Fig. 5. Influence of variation of δ.
(15)
(16) (17)
Fig. 6. Surface shrinking-and-splitting.
63

Figure 7(a) shows 3D data synthesized from CADdata for a hexagon nut. This experiment is made mainly toshow the capability of our method for modeling sparse dataand its superiority to the conventional level set modelingmethod. At the beginning, we specify a cubic closed surfacecovering the data, and select δ as 8 using the parameterestimation technique in Section 4.2. Next, we shrink andsplit the surface until no surface point moves as shown inFig. 7(b). After that, we update the stopping region, andobtain the model for this region shown in Fig. 7(c). Weobtain the final model by optimizing the positions of verti-ces in the model refinement stage in Fig. 7(d). Since theobject has a simple shape, we reduce the number of patchesto about 1/4 in extracting the mesh from the object modelshown in Fig. 7(c) by dividing the 3D space into doublesections.
To compare our method with the existing topology-adaptive modeling method, intermediate results obtainedusing the fast level set approach called the narrow-bandalgorithm [12] are shown in Figs. 8(a) and 8(b).
These models correspond to Figs. 7(b) and 7(c),respectively. As is evident here, there is not much differencebetween them. Table 1 summarizes the surface evolutionprocess in the first row, indicating the values in Figs. 7 and8. The subsequent rows correspond to the widths of stop-ping region (δ), numbers of vertices (N), and used CPUtimes (T) in seconds on a Pentium II 300-MHz personalcomputer. Comparing the two CPU times corresponding toFigs. 7(c) and 8(b) in Table 1, our method is approximately
10 times faster than level set modeling method using thenarrow-band technique.
Figure 9 illustrates the process of surface evolutionin the initial estimation stage by cross-sectional views.Figures 9(b) and 9(c) illustrate the intermediate and finalresults, respectively, obtained by surface shrinking andsplitting for the initial stopping region.
Figures 10(a) to 10(c) show cross sections of theevolving surface when no stopping region is set. Thesmoothness of the surface is gradually increased in eachstep due to the curvature-dependent speed.
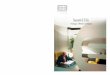
In the second experiment, the object to be modeled isa teacup with a hole and rim shown in Fig. 11(a). This objectis a typical difficult-to-model example. If we connect thedata points in the neighborhood one by one, a data point onthe inside of this cup may be connected with one on theoutside. While the deformable surfaces can avoid this prob-lem, the problem of how to restore the hole formed by thehandle arises.
We obtained images of a teacup suspended by a wirefrom several viewpoints. Figure 11(b) shows the 3D data ofthis object. The intermediate and final results are illustratedin Figs. 12(a) and 12(b). The number of vertices is 24,352and the CPU time is 165 seconds on a Pentium III 600-MHzpersonal computer.
The final experiment aims to show the capability ofour method in modeling multiobject scenes completelywithout a priori knowledge about the topology. The objectsto be modeled are three statues, including one with a hole,shown in Fig. 13(a). Figure 13(b) shows the 3D data.
Fig. 7. Experiment for an object with a hole.
Fig. 8. Experiment by a level set modeling method.
Table 1. Result summary of the experiment in Section 5.1
64

Figures 14(a) to 14(d) show the intermediate results. Here,the single closed surface shrinks as shown in Figs. 14(a) toFig. 14(c), and then splits into three surfaces while devel-oping a hole as shown in Fig. 14(d). The results at the firststage and the final stage are shown in Figs. 14(e) and 14(f),respectively. The number of vertices is 21,144 and the CPUtime is 2276 seconds on the same computer as in the firstexperiment.
Fig. 9. Process of topological changes.
Fig. 10. Process of surface evolving with smoothness.
Fig. 11. Object with a hole and a rim.
Fig. 12. Experiment for an object with a hole and a rim.
Fig. 13. Multiple objects.
Fig. 14. Experiment for multiple objects.
65

6. Conclusions
In the paper, we have proposed a method of modelinga 3D object of arbitrary topology by using variable-size ballmarching. Our algorithm has the advantage of modelingobjects fast and easily. It can also be implemented withoutany knowledge about correspondences between data pointsand sensor viewpoints, which constitutes the main differ-ence between our method and the statistical level setmethod [15]. In the future, we will investigate more deeplythe problem of designing the criterion of topological con-sistency between the model and 3D data in building thestopping region. In addition, we must analyze the proposedmarching method with greater mathematical rigor.
REFERENCES
1. Zha H, Morooka K, Hasegawa T. Active modeling of3D objects: Planning on the next best pose (NBP) foracquiring range images. Proc Int Conf on RecentAdvances in 3-D Digital Imaging and Modeling, p68–75, 1997.
2. Delingette H, Hebert M, Ikeuchi K. Shape repre-sentation and image segmentation using deformablesurfaces. Proc Conf on Computer Vision and PatternRecognition, p 467–472, 1991.
3. McInerney T, Terzopoulos D. A finite element modelfor 3D shape reconstruction and nonrigid motiontracking. Proc Int Conf on Computer Vision, p 518–523, 1993.
4. Hara K, Zha H, Hasegawa T. Regularization based3-D object modeling from multiple range images.Proc Int Conf on Pattern Recognition 1998;2:964–968.
5. DeCarlo D, Metaxas D. Shape evolution with struc-tural and topological changes using blending. IEEETrans Pattern Anal Machine Intell 1998;20:1186–1205.
6. Malladi R, Sethian JA, Vemuri BC. Shape modelingwith front propagation: A level set approach. IEEETrans Pattern Anal Machine Intell 1995;17:158–175.
7. Sethian JA. Level set methods and fast marchingmethods. Cambridge University Press; 1999.
8. Osher S, Sethian JA. Fronts propagating with curva-ture-dependent speed: Algorithms based on Hamil-ton–Jacobi formulation. J Comput Phys1988;79:12–49.
9. Serra J. Image analysis and mathematical morphol-ogy. Academic Press; 1982.
10. Arehart AB, Vincent L, Kimia BB. Mathematicalmorphology: The Hamilton–Jacobi connection. ProcInt Conf on Computer Vision, p 215–219, 1993.
11. Kimia BB, Tannenbaum AR, Zucker SW. Shapes,shocks, and deformations, I: The components ofshape and the reaction-diffusion space. Int J ComputVision 1995;15:189–224.
12. Chopp DL. Computing minimal surfaces via level setcurvature flow. J Comput Phys 1993;106:77–91.
13. Milne B. Adaptive level set methods interfaces. JComput Phys, Ph.D. thesis, Department of Mathe-matics, University of California, Berkeley, 1995.
14. Williams DJ, Shah M. A fast algorithm for activecontours. Proc Int Conf on Computer Vision, p 592–595, 1990.
15. Whitaker RT. A level-set approach to 3D reconstruc-tion from range data. Int J Comput Vision1998;29:203–231.
AUTHORS
Kenji Hara received his M.S. degree in mathematics and sciences from Kyoto University in 1984 and Ph.D. degree fromKyushu University in 1999. He joined Takeda Chemical Industries Co., Ltd. in 1989, where he engaged in software developmentas a system engineer. From 1991 to 2000, he was associated with the Mechanics & Electronics Research Institute at FukuokaIndustrial Technology Center. He is currently an adjunctive researcher at the Institute of Industrial Science, University of Tokyo.His current research interests include physics-based vision, 3D object recognition, and automatic geometric modeling.
66

AUTHORS (continued) (from left to right)
Hongbin Zha received his B.E. degree in electrical engineering from Hefei University of Technology, China, in 1983,and M.S. and Ph.D. degrees in electrical engineering from Kyushu University in 1987 and 1990. From 1990 to 1991, he was aresearch associate in the Department of Control Engineering and Science at Kyushu Institute of Technology. From 1991 to2000, he was with the Department of Computer Science and Communication Engineering, and then the Department of IntelligentSystems, Graduate School of Information Science and Electrical Engineering, Kyushu University, as an associate professor. Heis currently a professor at the Center for Information Science, Peking University, China. His research interests include robotics,computer vision, automatic geometric modeling, and sensor-based interaction between robots or robots and environments.
Tsutomu Hasegawa received his B.E. degree in electronic engineering and Ph.D. degree from Tokyo Institute ofTechnology in 1973 and 1987. He was associated with the Electrotechnical Laboratory of the Japanese Government from 1973to 1992, where he performed research in robotics. From 1981 to 1982, he was a visiting researcher at the Laboratoired’Automatique et d’Analyses des Systemes, Toulouse, France. He joined Kyushu University in 1992, and is currently a professorin the Deparment of Intelligent Systems, Graduate School of Information Science and Electrical Engineering. His researchinterests are in manipulator control, geometric modeling and reasoning, motion planning, and man–machine interaction.
67