Embed Size (px)
Citation preview

Computers & Industrial Engineering 75 (2014) 170–175
Contents lists available at ScienceDirect
Computers & Industrial Engineering
journal homepage: www.elsevier .com/ locate/caie
Two-machine no-wait flowshop scheduling with learning effectand convex resource-dependent processing times q
http://dx.doi.org/10.1016/j.cie.2014.06.0170360-8352/� 2014 Elsevier Ltd. All rights reserved.
q This manuscript was processed by Area Editor T.C. Edwin Cheng.⇑ Corresponding author.
E-mail address: [email protected] (Y. Liu).
Yuelei Liu ⇑, Zuren FengState Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710049, PR China
a r t i c l e i n f o
Article history:Received 31 October 2013Received in revised form 27 June 2014Accepted 28 June 2014Available online 8 July 2014
Keywords:Flowshop schedulingNo-waitLearning effectResource allocationNP-hard
a b s t r a c t
Two-machine no-wait flowshop scheduling problems in which the processing time of a job is a functionof its position in the sequence and its resource allocation are considered in the study. The primary objec-tive is to find the optimal sequence of jobs and the optimal resource allocation separately. Here we pro-pose two separate models: minimizing a cost function of makespan, total completion time, total absolutedifferences in completion times and total resource cost; minimizing a cost function of makespan, totalwaiting time, total absolute differences in waiting times and total resource cost. Since each model isstrongly NP-hard, we solve both models by breaking them down to two sub-problems, the optimalresource allocation problem for any job sequence and the optimal sequence problem with its optimalresource allocation. Specially, we transform the second sub-problem into the minimum of the bipartitegraph optimal matching problem (NP-hard), and solve it by using the classic KM (Kuhn–Munkres) algo-rithm. The solutions of the two sub-problems demonstrate that the target problems remain polynomialsolvable under the proposed model.
� 2014 Elsevier Ltd. All rights reserved.
1. Introduction
In classical scheduling theory, the job processing times areassumed as fixed and constant values (Pinedo, 2002). However,in numerous real-life situations, it is not rare that the job process-ing times are subject to changes due to the phenomenon of learn-ing and/or controllable processing time (resource allocation). Joblearning appears, for instance, in repeated processing of similartasks which improves worker’s skills; workers are able to performsetup, to handle raw materials and components at a greater pace,or to deal with machine operations and software (Biskup, 1999).Allocate a common limited resource such as financial budget, over-time, energy, fuel, subcontracting or manpower controls job-pro-cessing times.
Biskup (1999) and Cheng and Wang (2000) are pioneers whointroduced Wright (1936) learning curve into the field of schedul-ing. Biskup (1999) assumed that the processing time of a job is alog-linear learning curve, i.e., if job Jj is scheduled in position r ina sequence, its actual processing time is
pj ¼ �pjra
where �pj is the basic (normal) processing time of job Jj, a 6 0 is aconstant learning effect. He proved the polynomial solvability ofsingle machine scheduling problems of minimizing the sum of jobflow times and the total deviations of job completion times froma common due date. After him, a number of studies have beenreported regarding the scheduling problem with learning effect ina single machine such as Kuo and Yang (2006), Cheng, Wu, andLee (2008), Wu and Lee (2008), Lee, Wu, and Liu (2009), Janiak,Janiak, Rudek, and Wielgus (2009), Cheng, Lai, Wu, and Lee(2009), Zhu, Sun, Sun, and Li (2010), Cheng, Lee, and Wu (2010),Cheng, Wu, Cheng, and Wu (2011), Yin, Wu, Wu, and Cheng(2012), Yin, Cheng, and Wu (2012), Yin, Liu, Hao, and Zhou(2012). In the meanwhile, increasing efforts have been investedon scheduling with learning considerations in the flowshop envi-ronment. Lee and Wu (2004) minimized total completion time ina two-machine flowshop with a learning effect. Koulamas andKyparisis (2007) demonstrated the solvability of total completiontime minimization problems for the two-machine flowshop underthe shortest processing time sequencing rule when the job process-ing times are ordered and job-position-based learning is in effect.Wu and Lee (2009) minimized the sum of completion times or flowtimes under a permutation flowshop scheduling problem withlearning effects. Wang and Liu (2009) investigated a two-machineflowshop scheduling problem with both deterioration and learningeffects. Yin, Xu, Sun, and Li (2009) utilized a model, in which, the

Y. Liu, Z. Feng / Computers & Industrial Engineering 75 (2014) 170–175 171
actual processing time of a job position is a function of both totalnormal processing times and job’s scheduling to show that somesingle machine scheduling problems and m-machine permutationflowshop problems are polynomially solvable. Li, Hsu, Wu, andCheng (2011) considered a two-machine flowshop scheduling prob-lem in which the actual processing time of a job is determined bythe job’s position and a control parameter of the learning function.Wang, Wu, and Ji (2012) proposed a revised model of the generallearning effect and showed that m-machine flowshop schedulingproblems are polynomially solvable under the revised model.Cheng, Wu, Chen, Wu, and Cheng (2013) studied a two-machineflowshop scheduling problem with a truncated learning functionin which the processing time is a function of the job’s position ina scheduling and the learning truncation parameter. They proposeda branch-and-bound and three crossover-based GA to find the opti-mal and approximate solutions of the minimum makespan, respec-tively. Under the job position-based learning model proposed byBiskup (1999), however, the actual processing time of a job dropsto zero precipitously as the number of jobs increases, which is unre-alistic. Motivated by this observation, Cheng, Cheng, Wu, Hsu, andWu (2011) considered a two-agent single-machine schedulingproblem with truncated sum-of-processing-times-based learningconsiderations. Wu, Wu, Hsu, and Lai (2012) developed a branch-and-bound and a genetic heuristic-based algorithm for a two-machine total completion time flowshop problem, in which theactual job processing time is a function depending on the jobs thathave already been processed and a control parameter.
Meanwhile, sequencing problems with controllable processingtimes have been reported extensively by researchers since 1980.A survey of results on this subject, up to 1990, can be found inNowicki and Zdrzałka (1990). A more recent literature reviewwas given by Shabtay and Steiner (2007). In physical or economicsystems, many resource allocation problems do not use a linearresource consumption function, since it fails to reflect the law ofdiminishing marginal returns. In order to account for this law, anumber of studies on scheduling with resource allocation assumedthat the job processing time is a convex decreasing function of theamount of resource allocated to the processing of the job (Shabtay(2004), Shabtay and Kaspi (2004)). Shabtay, Kaspi, and Steiner(2007) considered a no-wait two-machine flowshop schedulingproblem with convex resource-dependent processing times at thefirst time, and proved this problem is strongly NP-hard. However,considering both the learning effects and the controllable process-ing times in a scheduling problem simultaneously, especially intwo-machine flowshop scheduling problem has not been studiedyet.
For a convex resource dependent function, we assume the fol-lowing relationship between the job processing time and theresource allocated to the job:
pj ¼�pj
uj
� �k
; uj > 0;
where �pj is the non-compressed (normal) processing time of job Jj,uj is the amount of resource allocated to job Jj and k is a positiveconstant. Since scheduling with controllable processing times isessentially a bacterial problem, which involves costs due to both ascheduling criterion and the total resource consumption, four dif-ferent types of optimization models are applicable. The first one isto minimize a cost function that is the sum of the two costs (e.g.,Vickson (1980), Alidaee and Ahmadian (1993), and Ng, Cheng,Kovalyov, and Lam (2003)). The second one is to minimize a sched-uling criterion under a constraint on the total resource consumption(e.g., Janiak (1987) and Janiak and Szkodny (1994)). The third type isto minimize the total resource consumption with limited maximalvalue of a scheduling criterion (e.g., Cheng and Kovalyov (1995)
and Janiak and Kovalyov (1996)) and the last one is to constructthe trade-off curve between the scheduling criterion and resourceconsumption (e.g., Van Wassenhove and Baker (1982), Danielsand Sarin (1989) and Cheng, Janiak, and Kovalyov (1998)). In thisstudy, we adopt the fourth approach.
The effects of learning and resource allocation have never beenconsidered concurrently since Wang, Wang, and Wang (2010).They considered a single-machine scheduling problem with posi-tion-based learning effect and linear/convex resource-dependentprocessing times to minimize the weighted sum of the makespanof all jobs, the total completion/waiting times, the total absolutedifferences in completion/waiting times, and resource cost. Here,we study two-machine no-wait flowshop scheduling problem withposition and resource-dependent processing times at the sametime.
The rest of this paper is organized as follows. A formal descrip-tion of the model under this study will be given in Section 2.Sections 3 and 4 will demonstrate the polynomial solvability ofthe proposed problems. In Section 5, a test example is given. Con-clusions and discussion will be presented in Section 6.
2. Problem formulation
In order to simultaneously take into account the learning effectsand resource allocation in a no-wait two-machine flowshop, a newmodel is proposed as follows:
There are a set J = {J1, J2, . . ., Jn} of n jobs scheduling on a no-waittwo-machine flowshop. With the assumption that all the jobs areindependent, non-preemptive and immediately available for pro-cessing. Each job Jj includes a set of two operations, where Oji rep-resents the operation of job Jj on machine i for i = 1, 2 andj = 1, 2, . . ., n. Each job has to be processed on both machines fol-lowing the same route and each machine handles one job at a time.We assume that jobs are not allowed to wait between the twomachines, i.e., there is a no-wait restriction. Let pj be the actualprocessing time of job Jj and pji be the actual processing time ofoperation Oji. Here, we consider the following time and convexresource-dependent processing times model
pji ¼�pjira
uji
� �k
; uji > 0; ð1Þ
where �pji is the basic(normal) processing time of operations Oji, r isthe position of job Jj which is scheduled in a sequence, a 6 0 is alearning index, and uji is the amount of a non-renewable resourceallocated to operations Oji and k is a positive constant.
For a given sequence p = [J[1], J[2], . . ., J[n]], the makespan in a no-wait two-machine flowshop problem can be represented as thelongest path in a directed acyclic graph as shown in Fig. 1, where[j] is the job in the jth position in p, with constraints p[j]2 = p[j+1]1.
Cj = Cj(p) represents the completion time for job Jj. LetCmax = max {Cj|j = 1, 2, . . ., n}, TC ¼
Pnj¼1Cj; TW ¼
Pnj¼1Wj; TADC ¼Pn
h¼1
Pnj¼hjCh � Cjj, and TADW ¼
Pnh¼1
Pnj¼hjWh �Wjj be the make-
span of all jobs, the total completion times, the total waiting times,the total absolute differences in completion times, and the totalabsolute differences in waiting times, respectively, where Wj = Cj
� pj is the waiting time of job Jj. The objective is to determinethe optimal resource allocations and the optimal sequence of jobsin the flowshop so that the corresponding value of the followingcost functions be optimal:
f1ðp;uÞ ¼ d1Cmax þ d2TC þ d3TADC þ d4
Xn
j¼1
Gjuj; ð2Þ
f2ðp;uÞ ¼ d1Cmax þ d2TW þ d3TADW þ d4
Xn
j¼1
Gjuj; ð3Þ
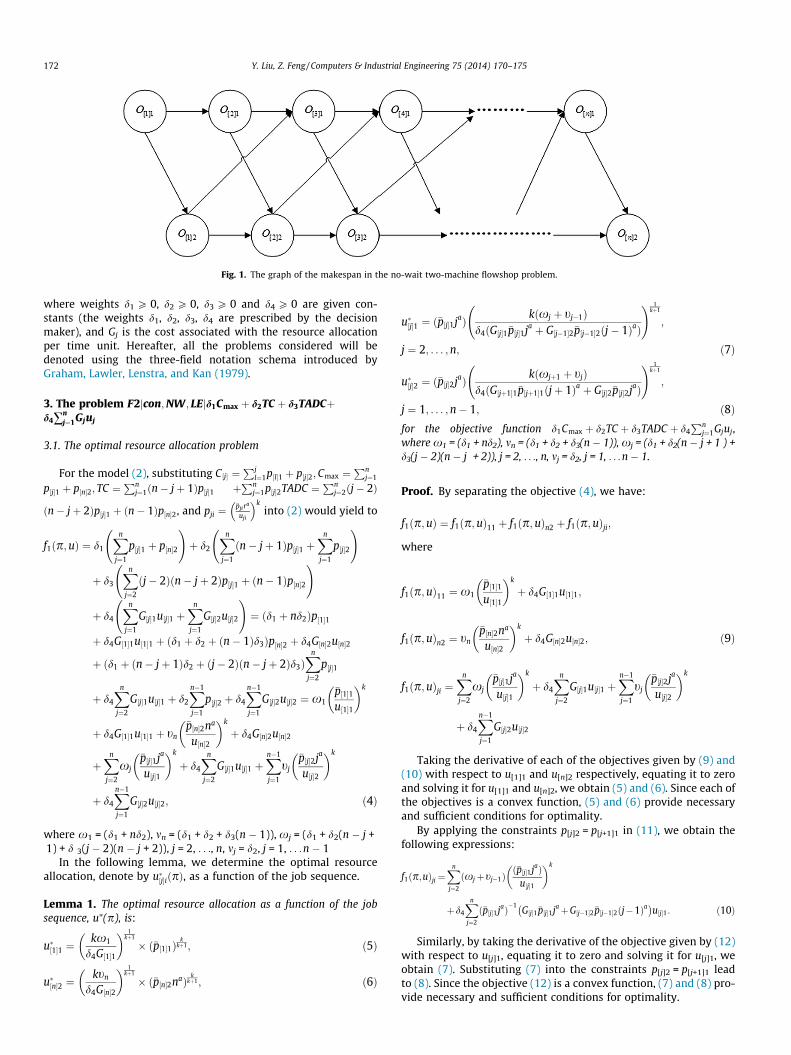
Fig. 1. The graph of the makespan in the no-wait two-machine flowshop problem.
172 Y. Liu, Z. Feng / Computers & Industrial Engineering 75 (2014) 170–175
where weights d1 P 0, d2 P 0, d3 P 0 and d4 P 0 are given con-stants (the weights d1, d2, d3, d4 are prescribed by the decisionmaker), and Gj is the cost associated with the resource allocationper time unit. Hereafter, all the problems considered will bedenoted using the three-field notation schema introduced byGraham, Lawler, Lenstra, and Kan (1979).
3. The problem F2jcon;NW ; LEjd1Cmax þ d2TC þ d3TADCþd4+
nj¼1Gjuj
3.1. The optimal resource allocation problem
For the model (2), substituting C½j� ¼Pj
l¼1p½l�1 þ p½j�2;Cmax ¼Pn
j¼1
p½j�1 þ p½n�2; TC ¼Pn
j¼1ðn� jþ 1Þp½j�1 þPn
j¼1p½j�2TADC ¼Pn
j¼2ðj� 2Þ
ðn� jþ 2Þp½j�1 þ ðn� 1Þp½n�2, and pji ¼�pjir
a
uji
� �kinto (2) would yield to
f1ðp;uÞ ¼ d1
Xn
j¼1
p½j�1 þ p½n�2
!þ d2
Xn
j¼1
ðn� jþ 1Þp½j�1 þXn
j¼1
p½j�2
!
þ d3
Xn
j¼2
ðj� 2Þðn� jþ 2Þp½j�1 þ ðn� 1Þp½n�2
!
þ d4
Xn
j¼1
G½j�1u½j�1 þXn
j¼1
G½j�2u½j�2
!¼ ðd1 þ nd2Þp½1�1
þ d4G½1�1u½1�1 þ ðd1 þ d2 þ ðn� 1Þd3Þp½n�2 þ d4G½n�2u½n�2
þ ðd1 þ ðn� jþ 1Þd2 þ ðj� 2Þðn� jþ 2Þd3ÞXn
j¼2
p½j�1
þ d4
Xn
j¼2
G½j�1u½j�1 þ d2
Xn�1
j¼1
p½j�2 þ d4
Xn�1
j¼1
G½j�2u½j�2 ¼ x1�p½1�1u½1�1
� �k
þ d4G½1�1u½1�1 þ tn�p½n�2na
u½n�2
� �k
þ d4G½n�2u½n�2
þXn
j¼2
xj�p½j�1ja
u½j�1
� �k
þ d4
Xn
j¼2
G½j�1u½j�1 þXn�1
j¼1
tj�p½j�2ja
u½j�2
� �k
þ d4
Xn�1
j¼1
G½j�2u½j�2; ð4Þ
where x1 = (d1 + nd2), mn = (d1 + d2 + d3(n � 1)), xj = (d1 + d2(n � j +1) + d 3(j � 2)(n � j + 2)), j = 2, . . ., n, mj = d2, j = 1, . . .n � 1
In the following lemma, we determine the optimal resourceallocation, denote by u�½j�iðpÞ, as a function of the job sequence.
Lemma 1. The optimal resource allocation as a function of the jobsequence, u⁄(p), is:
u�½1�1 ¼kx1
d4G½1�1
� � 1kþ1
� ð�p½1�1Þk
kþ1; ð5Þ
u�½n�2 ¼ktn
d4G½n�2
� � 1kþ1
� ð�p½n�2naÞk
kþ1; ð6Þ
u�½j�1 ¼ ð�p½j�1jaÞ kðxj þ tj�1Þd4ðG½j�1�p½j�1ja þ G½j�1�2�p½j�1�2ðj� 1ÞaÞ
! 1kþ1
;
j ¼ 2; . . . ;n; ð7Þ
u�½j�2 ¼ ð�p½j�2jaÞ kðxjþ1 þ tjÞd4ðG½jþ1�1�p½jþ1�1ðjþ 1Þa þ G½j�2�p½j�2jaÞ
! 1kþ1
;
j ¼ 1; . . . ;n� 1; ð8Þfor the objective function d1Cmax þ d2TC þ d3TADC þ d4
Pnj¼1Gjuj,
where x1 = (d1 + nd2), mn = (d1 + d2 + d3(n� 1)), xj = (d1 + d2(n� j + 1 ) +d3(j� 2)(n� j + 2)), j = 2, . . ., n, mj = d2, j = 1, . . .n� 1.
Proof. By separating the objective (4), we have:
f1ðp;uÞ ¼ f1ðp;uÞ11 þ f1ðp;uÞn2 þ f1ðp;uÞji;
where
f1ðp;uÞ11 ¼ x1�p½1�1u½1�1
� �k
þ d4G½1�1u½1�1;
f1ðp;uÞn2 ¼ tn�p½n�2na
u½n�2
� �k
þ d4G½n�2u½n�2; ð9Þ
f1ðp;uÞji ¼Xn
j¼2
xj�p½j�1ja
u½j�1
� �k
þ d4
Xn
j¼2
G½j�1u½j�1 þXn�1
j¼1
tj�p½j�2ja
u½j�2
� �k
þ d4
Xn�1
j¼1
G½j�2u½j�2
Taking the derivative of each of the objectives given by (9) and(10) with respect to u[1]1 and u[n]2 respectively, equating it to zeroand solving it for u[1]1 and u[n]2, we obtain (5) and (6). Since each ofthe objectives is a convex function, (5) and (6) provide necessaryand sufficient conditions for optimality.
By applying the constraints p[j]2 = p[j+1]1 in (11), we obtain thefollowing expressions:
f1ðp;uÞji ¼Xn
j¼2
ðxjþtj�1Þð�p½j�1jaÞ
u½j�1
� �k
þd4
Xn
j¼2
ð�p½j�1jaÞ�1G½j�1�p½j�1jaþG½j�1�2�p½j�1�2ðj�1Þa� �
u½j�1: ð10Þ
Similarly, by taking the derivative of the objective given by (12)with respect to u[j]1, equating it to zero and solving it for u[j]1, weobtain (7). Substituting (7) into the constraints p[j]2 = p[j+1]1 leadto (8). Since the objective (12) is a convex function, (7) and (8) pro-vide necessary and sufficient conditions for optimality.
Y. Liu, Z. Feng / Computers & Industrial Engineering 75 (2014) 170–175 173
3.2. The optimal sequence problem
Substituting (7) and (8) into (11), substituting (5) into (9) andsubstituting (6) into (10), lead to the new unified expressions forthe cost function for the objective function d1Cmax þ d2TCþd3TADC þ d4
Pnj¼1Gjuj, under an optimal resource allocation and as
a function of the job sequence:
f1ðp;u�ðpÞÞji ¼ dk
kþ14 k�
kkþ1 þ k
1kþ1
� ��Xn
j¼2
ðxj þ tj�1Þ1kjaG½j�1�p½j�1
�
þðxj þ tj�1Þ1kðj� 1ÞaG½j�1�2�p½j�1�2
� kkþ1
f1ðp;u�ðpÞÞ11 ¼ ðd4Þk
kþ1 k�k
kþ1 þ k1
kþ1
� �x
1k1G½1�1�p½1�1
� � kkþ1;
f1ðp;u�ðpÞÞn2 ¼ ðd4Þk
kþ1 k�k
kþ1 þ k1
kþ1
� �t
1knnaG½n�2�p½n�2
� � kkþ1:
As is described above, we find the objective can be equivalentlytransformed into the following form which its optimal sequence pof jobs stays the same.
g1ðp;u�ðpÞÞ ¼Xn
j¼1
ð/j1h½j�1 þ /j2h½j�2Þ ð11Þ
where
/j1 ¼ x1k1; ðx2 þ t1Þ
1k2a; ðx3 þ t2Þ
1k3a; . . . ; ðxn þ tn�1Þ
1kna
n o; ð12Þ
/j2 ¼ ðx2 þ t1Þ1k; ðx3 þ t2Þ
1k2a; :::; ðxn þ tðn�1ÞÞ
1kðn� 1Þa; t
1knna
n o;ð13Þ
h½j�1 ¼ G½j�1�p½j�1; ð14Þh½j�2 ¼ G½j�2�p½j�2; ð15Þ
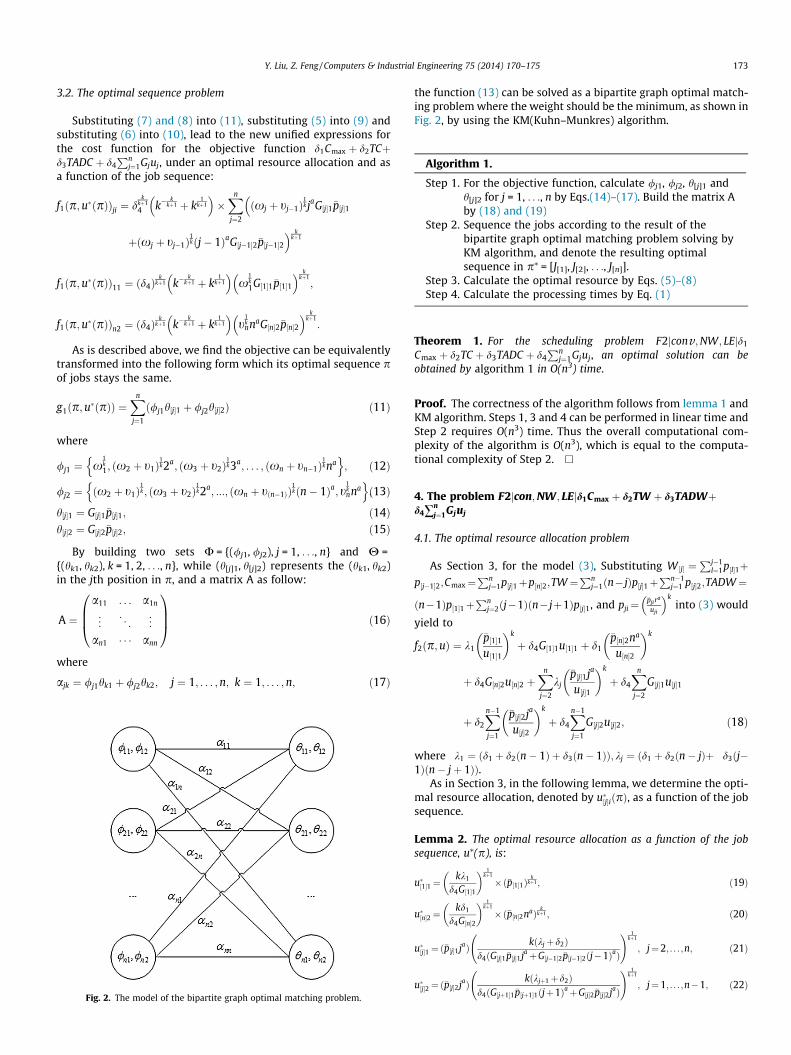
By building two sets U = {(/j1, /j2), j = 1, . . ., n} and H ={(hk1, hk2), k = 1, 2, . . ., n}, while (h[j]1, h[j]2) represents the (hk1, hk2)in the jth position in p, and a matrix A as follow:
A ¼a11 . . . a1n
..
. . .. ..
.
an1 � � � ann
0BB@
1CCA ð16Þ
where
ajk ¼ /j1hk1 þ /j2hk2; j ¼ 1; . . . ;n; k ¼ 1; . . . ;n; ð17Þ
Fig. 2. The model of the bipartite graph optimal matching problem.
the function (13) can be solved as a bipartite graph optimal match-ing problem where the weight should be the minimum, as shown inFig. 2, by using the KM(Kuhn–Munkres) algorithm.
Algorithm 1.
Step 1. For the objective function, calculate /j1, /j2, h[j]1 andh[j]2 for j = 1, . . ., n by Eqs.(14)–(17). Build the matrix Aby (18) and (19)
Step 2. Sequence the jobs according to the result of thebipartite graph optimal matching problem solving byKM algorithm, and denote the resulting optimalsequence in p⁄ = [J[1], J[2], . . ., J[n]].
Step 3. Calculate the optimal resource by Eqs. (5)–(8)Step 4. Calculate the processing times by Eq. (1)
Theorem 1. For the scheduling problem F2jconv ;NW; LEjd1
Cmax þ d2TC þ d3TADC þ d4Pn
j¼1Gjuj, an optimal solution can beobtained by algorithm 1 in O(n3) time.
Proof. The correctness of the algorithm follows from lemma 1 andKM algorithm. Steps 1, 3 and 4 can be performed in linear time andStep 2 requires O(n3) time. Thus the overall computational com-plexity of the algorithm is O(n3), which is equal to the computa-tional complexity of Step 2. h
4. The problem F2jcon;NW; LEjd1Cmax þ d2TW þ d3TADWþd4+
nj¼1Gjuj
4.1. The optimal resource allocation problem
As Section 3, for the model (3), Substituting W ½j� ¼Pj�1
l¼1p½l�1þp½j�1�2;Cmax¼
Pnj¼1p½j�1þp½n�2;TW¼
Pnj¼1ðn� jÞp½j�1þ
Pn�1j¼1 p½j�2;TADW¼
ðn�1Þp½1�1þPn
j¼2ðj�1Þðn� jþ1Þp½j�1, and pji¼�pjir
a
uji
� �kinto (3) would
yield to
f2ðp;uÞ ¼ k1�p½1�1u½1�1
� �k
þ d4G½1�1u½1�1 þ d1�p½n�2na
u½n�2
� �k
þ d4G½n�2u½n�2 þXn
j¼2
kj�p½j�1ja
u½j�1
� �k
þ d4
Xn
j¼2
G½j�1u½j�1
þ d2
Xn�1
j¼1
�p½j�2ja
u½j�2
� �k
þ d4
Xn�1
j¼1
G½j�2u½j�2; ð18Þ
where k1 ¼ ðd1 þ d2ðn� 1Þ þ d3ðn� 1ÞÞ; kj ¼ ðd1 þ d2ðn� jÞþ d3ðj�1Þðn� jþ 1ÞÞ.
As in Section 3, in the following lemma, we determine the opti-mal resource allocation, denoted by u�½j�iðpÞ, as a function of the jobsequence.
Lemma 2. The optimal resource allocation as a function of the jobsequence, u⁄(p), is:
u�½1�1 ¼kk1
d4G½1�1
� � 1kþ1
�ð�p½1�1Þk
kþ1; ð19Þ
u�½n�2 ¼kd1
d4G½n�2
� � 1kþ1
�ð�p½n�2naÞk
kþ1; ð20Þ
u�½j�1 ¼ð�p½j�1jaÞ kðkjþd2Þd4ðG½j�1�p½j�1jaþG½j�1�2�p½j�1�2ðj�1ÞaÞ
! 1kþ1
; j¼2; . . . ;n; ð21Þ
u�½j�2 ¼ð�p½j�2jaÞ kðkjþ1þd2Þd ðG �p ðjþ1ÞaþG �p jaÞ
! 1kþ1
; j¼1; . . . ;n�1; ð22Þ
4 ½jþ1�1 ½jþ1�1 ½j�2 ½j�2
174 Y. Liu, Z. Feng / Computers & Industrial Engineering 75 (2014) 170–175
for the objective function d1Cmax þ d2TW þ d3TADW þ d4Pn
j¼1Gjuj,where k1 ¼ ðd1 þ d2ðn� 1Þ þ d3ðn� 1ÞÞ; kj ¼ ðd1 þ d2ðn� jÞ þd3ðj�1Þðn� jþ 1ÞÞ.
Proof. By partitioning the objective (20), we have:
f2ðp;uÞ ¼ f2ðp;uÞ11 þ f2ðp;uÞn2 þ f2ðp;uÞji;
where
f2ðp;uÞ11 ¼ k1�p½1�1u½1�1
� �k
þ d4G½1�1u½1�1; ð23Þ
f2ðp;uÞn2 ¼ d1�p½n�2na
u½n�2
� �k
þ d4G½n�2u½n�2; ð24Þ
f2ðp;uÞji ¼Xn
j¼2
kj
�p½j�1ja
u½j�1
� �k
þ d4
Xn
j¼2
G½j�1u½j�1 þ d2
Xn�1
j¼1
�p½j�2ja
u½j�2
� �k
þd4
Xn�1
j¼1
G½j�2u½j�2 ð25Þ
Following the same procedure as described above would lead toEq. (19) and (20). Since each of the objectives is a convex function,(21) and (22) provide necessary and sufficient conditions foroptimality. h
Substituting the constraints p[j]2 = p[j+1]1 into (27), we obtain thefollowing expression:
f2ðp;uÞji ¼Xn
j¼2
ðkj þ d2Þð�p½j�1jaÞ
u½j�1
� �k
þ d4
Xn
j¼2
ð�p½j�1jaÞ�1
G½j�1�p½j�1ja þ G½j�1�2�p½j�1�2ðj� 1Þa� �
u½j�1: ð26Þ
Following the same procedure as above again, we obtain (23)and (24). Since the objective (28) is a convex function as well,(23) and (24) provide necessary and sufficient conditions foroptimality.
4.2. The optimal sequence problem
Substituting (23) and (24) into (27), substituting (21) into (25)and substituting (22) into (26), lead us to the new unified expres-sions for the cost function for the objective function d1Cmaxþd2TW þ d3TADW þ d4
Pnj¼1Gjuj; under an optimal resource alloca-
tion and as a function of the job sequence:
f2ðp;u�ðpÞÞji ¼ dk
kþ14 k�
kkþ1þk
1kþ1
� ��Xn
j¼2
ðkjþd2Þ1k jaG½j�1�p½j�1þðkjþd2Þ
1kðj�1ÞaG½j�1�2�p½j�1�2
� � kkþ1
f2ðp;u�ðpÞÞ11 ¼ ðd4Þk
kþ1 k�k
kþ1 þ k1
kþ1
� �k
1k1G½1�1�p½1�1
� � kkþ1;
f2ðp;u�ðpÞÞn2 ¼ ðd4Þk
kþ1 k�k
kþ1 þ k1
kþ1
� �d
1k1naG½n�2�p½n�2
� � kkþ1:
Similarly as above, the objective is equivalent of determiningthe optimal sequence p of jobs for the function
g2ðp;u�ðpÞÞ ¼Xn
j¼1
ðgj1u½j�1 þ gj2u½j�2Þ ð27Þ
where
gj1 ¼ k1k1; ðk2 þ d2Þ
1k 2a; ðk3 þ d2Þ
1k 3a; . . . ; ðkn þ d2Þ
1k na
n o; ð28Þ
gj2 ¼ ðk2 þ d2Þ1k; ðk3 þ d2Þ
1k 2a; . . . ; ðkn þ d2Þ
1kðn� 1Þa; d
1k1na
n o; ð29Þ
u½j�1 ¼ G½j�1�p½j�1; ð30Þu½j�2 ¼ G½j�2�p½j�2; ð31Þ
By building two sets K = {(gj1, gj2), j = 1, . . ., n} and C = {(uk1, -uk2), k = 1, 2, . . ., n}, where (u[j]1, u[j]2) represents the (uk1, uk2) inthe jth position in p, and a matrix B as
B ¼
b11 . . . b1n
..
. . .. ..
.
bn1 � � � bnn
0BB@
1CCA ð32Þ
where
bjk ¼ gj1uk1 þ gj2uk2; j ¼ 1; . . . ;n; k ¼ 1; . . . ;n; ð33Þ
the function (29) can be solved as a bipartite graph optimal match-ing problem where the weight should be the minimum, by usingthe KM(Kuhn–Munkres) algorithm.
Algorithm 2.
Step 1. For the objective function, calculate gj1, gj2, u[j]1 andu[j]2 for j = 1, . . ., n by Eqs. (30)–(33). Build the matrixB by (34) and (35)
Step 2. Sequence the jobs according to the result of thebipartite graph optimal matching problem solving byKM algorithm, and denote the resulting optimalsequence in p⁄ = [J[1], J[2], . . ., J[n]]
Step 3. Calculate the optimal resource by Eqs. (19)–(22).Step 4. Calculate the processing times by Eq. (1)
Theorem 2. For the scheduling problem F2jconv;NW ; LEjd1
Cmax þ d2TW þ d3TADW þ d4Pn
j¼1Gjuj, an optimal solution can beobtained by algorithm 1 in O(n3) time.
Proof. The correctness of the algorithm follows lemma 1 and KMalgorithm. Steps 1, 3 and 4 can be performed in linear time andStep 2 requires O(n3) time. Thus the overall computational com-plexity of the algorithm is O(n3), which is equal to the computa-tional complexity of Step 2. h
5. A test example
Since the algorithm is similar for the two problems, we willapply the example only for the problem F2jconv ;NW; LEjd1Cmax
þd2TC þ d3TADC þ d4Pn
j¼1Gjuj.
Example 1. Data: n = 5, a = - 1, k = 1, d1 = d2 = d3 = d4 = 1 and theparameters for each job as given in Table 1. Stem from Algorithm 1,the optimal schedule is [J3, J5, J1, J2, J4], and the optimal total cost is115.8986.
However, if we use the smallest processing time first (SPT) rule,the schedule is [J5, J2, J3, J1, J4] and the total cost is 120.9929, indi-cating a relative error of 4.40%.
6. Conclusions
The problem of scheduling n jobs with convex resource depen-dent processing times and deteriorating jobs in two-machine no-wait flowshop has been investigated. The objective function is tominimize a cost function containing makespan, total completion(waiting) time, total absolute differences in completion (waiting)time and total resource cost. Since scheduling problems with boththe learning effects and the controllable processing timesconsidered simultaneously, especially in the two-machine model,are rarely studied, we extended the machine model from
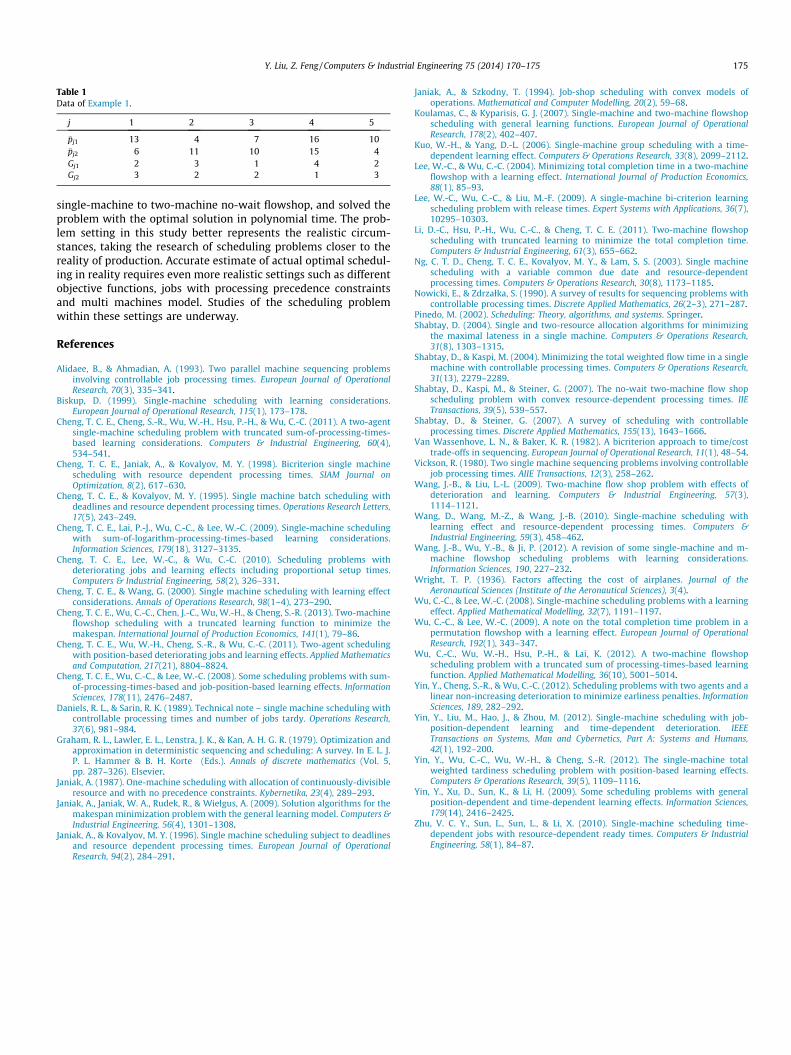
Table 1Data of Example 1.
j 1 2 3 4 5
�pj1 13 4 7 16 10�pj2 6 11 10 15 4Gj1 2 3 1 4 2Gj2 3 2 2 1 3
Y. Liu, Z. Feng / Computers & Industrial Engineering 75 (2014) 170–175 175
single-machine to two-machine no-wait flowshop, and solved theproblem with the optimal solution in polynomial time. The prob-lem setting in this study better represents the realistic circum-stances, taking the research of scheduling problems closer to thereality of production. Accurate estimate of actual optimal schedul-ing in reality requires even more realistic settings such as differentobjective functions, jobs with processing precedence constraintsand multi machines model. Studies of the scheduling problemwithin these settings are underway.
References
Alidaee, B., & Ahmadian, A. (1993). Two parallel machine sequencing problemsinvolving controllable job processing times. European Journal of OperationalResearch, 70(3), 335–341.
Biskup, D. (1999). Single-machine scheduling with learning considerations.European Journal of Operational Research, 115(1), 173–178.
Cheng, T. C. E., Cheng, S.-R., Wu, W.-H., Hsu, P.-H., & Wu, C.-C. (2011). A two-agentsingle-machine scheduling problem with truncated sum-of-processing-times-based learning considerations. Computers & Industrial Engineering, 60(4),534–541.
Cheng, T. C. E., Janiak, A., & Kovalyov, M. Y. (1998). Bicriterion single machinescheduling with resource dependent processing times. SIAM Journal onOptimization, 8(2), 617–630.
Cheng, T. C. E., & Kovalyov, M. Y. (1995). Single machine batch scheduling withdeadlines and resource dependent processing times. Operations Research Letters,17(5), 243–249.
Cheng, T. C. E., Lai, P.-J., Wu, C.-C., & Lee, W.-C. (2009). Single-machine schedulingwith sum-of-logarithm-processing-times-based learning considerations.Information Sciences, 179(18), 3127–3135.
Cheng, T. C. E., Lee, W.-C., & Wu, C.-C. (2010). Scheduling problems withdeteriorating jobs and learning effects including proportional setup times.Computers & Industrial Engineering, 58(2), 326–331.
Cheng, T. C. E., & Wang, G. (2000). Single machine scheduling with learning effectconsiderations. Annals of Operations Research, 98(1–4), 273–290.
Cheng, T. C. E., Wu, C.-C., Chen, J.-C., Wu, W.-H., & Cheng, S.-R. (2013). Two-machineflowshop scheduling with a truncated learning function to minimize themakespan. International Journal of Production Economics, 141(1), 79–86.
Cheng, T. C. E., Wu, W.-H., Cheng, S.-R., & Wu, C.-C. (2011). Two-agent schedulingwith position-based deteriorating jobs and learning effects. Applied Mathematicsand Computation, 217(21), 8804–8824.
Cheng, T. C. E., Wu, C.-C., & Lee, W.-C. (2008). Some scheduling problems with sum-of-processing-times-based and job-position-based learning effects. InformationSciences, 178(11), 2476–2487.
Daniels, R. L., & Sarin, R. K. (1989). Technical note – single machine scheduling withcontrollable processing times and number of jobs tardy. Operations Research,37(6), 981–984.
Graham, R. L., Lawler, E. L., Lenstra, J. K., & Kan, A. H. G. R. (1979). Optimization andapproximation in deterministic sequencing and scheduling: A survey. In E. L. J.P. L. Hammer & B. H. Korte (Eds.). Annals of discrete mathematics (Vol. 5,pp. 287–326). Elsevier.
Janiak, A. (1987). One-machine scheduling with allocation of continuously-divisibleresource and with no precedence constraints. Kybernetika, 23(4), 289–293.
Janiak, A., Janiak, W. A., Rudek, R., & Wielgus, A. (2009). Solution algorithms for themakespan minimization problem with the general learning model. Computers &Industrial Engineering, 56(4), 1301–1308.
Janiak, A., & Kovalyov, M. Y. (1996). Single machine scheduling subject to deadlinesand resource dependent processing times. European Journal of OperationalResearch, 94(2), 284–291.
Janiak, A., & Szkodny, T. (1994). Job-shop scheduling with convex models ofoperations. Mathematical and Computer Modelling, 20(2), 59–68.
Koulamas, C., & Kyparisis, G. J. (2007). Single-machine and two-machine flowshopscheduling with general learning functions. European Journal of OperationalResearch, 178(2), 402–407.
Kuo, W.-H., & Yang, D.-L. (2006). Single-machine group scheduling with a time-dependent learning effect. Computers & Operations Research, 33(8), 2099–2112.
Lee, W.-C., & Wu, C.-C. (2004). Minimizing total completion time in a two-machineflowshop with a learning effect. International Journal of Production Economics,88(1), 85–93.
Lee, W.-C., Wu, C.-C., & Liu, M.-F. (2009). A single-machine bi-criterion learningscheduling problem with release times. Expert Systems with Applications, 36(7),10295–10303.
Li, D.-C., Hsu, P.-H., Wu, C.-C., & Cheng, T. C. E. (2011). Two-machine flowshopscheduling with truncated learning to minimize the total completion time.Computers & Industrial Engineering, 61(3), 655–662.
Ng, C. T. D., Cheng, T. C. E., Kovalyov, M. Y., & Lam, S. S. (2003). Single machinescheduling with a variable common due date and resource-dependentprocessing times. Computers & Operations Research, 30(8), 1173–1185.
Nowicki, E., & Zdrzałka, S. (1990). A survey of results for sequencing problems withcontrollable processing times. Discrete Applied Mathematics, 26(2–3), 271–287.
Pinedo, M. (2002). Scheduling: Theory, algorithms, and systems. Springer.Shabtay, D. (2004). Single and two-resource allocation algorithms for minimizing
the maximal lateness in a single machine. Computers & Operations Research,31(8), 1303–1315.
Shabtay, D., & Kaspi, M. (2004). Minimizing the total weighted flow time in a singlemachine with controllable processing times. Computers & Operations Research,31(13), 2279–2289.
Shabtay, D., Kaspi, M., & Steiner, G. (2007). The no-wait two-machine flow shopscheduling problem with convex resource-dependent processing times. IIETransactions, 39(5), 539–557.
Shabtay, D., & Steiner, G. (2007). A survey of scheduling with controllableprocessing times. Discrete Applied Mathematics, 155(13), 1643–1666.
Van Wassenhove, L. N., & Baker, K. R. (1982). A bicriterion approach to time/costtrade-offs in sequencing. European Journal of Operational Research, 11(1), 48–54.
Vickson, R. (1980). Two single machine sequencing problems involving controllablejob processing times. AIIE Transactions, 12(3), 258–262.
Wang, J.-B., & Liu, L.-L. (2009). Two-machine flow shop problem with effects ofdeterioration and learning. Computers & Industrial Engineering, 57(3),1114–1121.
Wang, D., Wang, M.-Z., & Wang, J.-B. (2010). Single-machine scheduling withlearning effect and resource-dependent processing times. Computers &Industrial Engineering, 59(3), 458–462.
Wang, J.-B., Wu, Y.-B., & Ji, P. (2012). A revision of some single-machine and m-machine flowshop scheduling problems with learning considerations.Information Sciences, 190, 227–232.
Wright, T. P. (1936). Factors affecting the cost of airplanes. Journal of theAeronautical Sciences (Institute of the Aeronautical Sciences), 3(4).
Wu, C.-C., & Lee, W.-C. (2008). Single-machine scheduling problems with a learningeffect. Applied Mathematical Modelling, 32(7), 1191–1197.
Wu, C.-C., & Lee, W.-C. (2009). A note on the total completion time problem in apermutation flowshop with a learning effect. European Journal of OperationalResearch, 192(1), 343–347.
Wu, C.-C., Wu, W.-H., Hsu, P.-H., & Lai, K. (2012). A two-machine flowshopscheduling problem with a truncated sum of processing-times-based learningfunction. Applied Mathematical Modelling, 36(10), 5001–5014.
Yin, Y., Cheng, S.-R., & Wu, C.-C. (2012). Scheduling problems with two agents and alinear non-increasing deterioration to minimize earliness penalties. InformationSciences, 189, 282–292.
Yin, Y., Liu, M., Hao, J., & Zhou, M. (2012). Single-machine scheduling with job-position-dependent learning and time-dependent deterioration. IEEETransactions on Systems, Man and Cybernetics, Part A: Systems and Humans,42(1), 192–200.
Yin, Y., Wu, C.-C., Wu, W.-H., & Cheng, S.-R. (2012). The single-machine totalweighted tardiness scheduling problem with position-based learning effects.Computers & Operations Research, 39(5), 1109–1116.
Yin, Y., Xu, D., Sun, K., & Li, H. (2009). Some scheduling problems with generalposition-dependent and time-dependent learning effects. Information Sciences,179(14), 2416–2425.
Zhu, V. C. Y., Sun, L., Sun, L., & Li, X. (2010). Single-machine scheduling time-dependent jobs with resource-dependent ready times. Computers & IndustrialEngineering, 58(1), 84–87.