Embed Size (px)
Citation preview

1
Effect of Displacement Feedback Control on the Frequencies of
Cantilevered Beams with Tip Mass and Axial Load using Piezo
Actuators
Malesela K. Moutlana In fulfillment of a Master of Science in Mechanical Engineering
College of Agriculture, Engineering and Science, University of KwaZulu-Natal
School of Engineering
January 2014
Supervisor:
Prof. Sarp Adali

ii
Declaration 1
Supervisor:
As the candidate’s Supervisor I agree/do not agree to the submission of this dissertation.
Signed:………………………………………(Prof. Sarp Adali) Date:……………
Candidate:
I, Malesela Kenneth Moutlana (207528577) declare that:
(i) The research reported in this dissertation, except where otherwise indicated, is my
original work.
(ii) This dissertation has not been submitted for any degree or examination at any
university.
(iii) This dissertation does not contain other person’s data, pictures, graphs or other
information, unless specifically acknowledged as being sourced from other persons.
(iv) This dissertation does not contain other person’s writing, unless specifically
acknowledged as being sourced from other researchers. Where written sources have
been quoted, then:
a) their words have been re-written but the general information attributed to them
has been referenced;
b) where their exact words have been used, their writing has been placed inside
quotation marks, and referenced.
(v) Where I have reproduced a publication of which I am an author, co-author or editor, I
have indicated in detail which part of the publication was actually written by myself
alone and have fully referenced such publication.
(vi) This dissertation does not contain text, graphics or tables copied and pasted from the
Internet, unless specifically acknowledged, and the source being detailed in the
dissertation and in the References sections.
Signed:……………………………………..….(MK Moutlana) Date:……………

iii
Declaration 2
Conferences
1. Moutlana MK (2009) Analytical model for a study of a composite cantilevered beam
with piezo actuators attached to the top and bottom surface. 15th International
Conference on Composite Structures (ICCS-15), 15-17 June 2009, Porto, Portugal.
Presentation
2. Moutlana MK (2013) Effect of piezoelectric control on a cantilever beam with extended
tip mass and axial load. Proceedings of 1st International Conference on Composite and
Biocomposites and Nanocomposites (ICCBN-1), 2 – 4 December 2013, Durban.
pp.555-575
3. Moutlana MK (2014) Use of piezo actuators to maximize the fundamental frequency and
the gaps. Proceedings of 9th South African Conference on Computational and Applied
Mechanics (SACAM2014), 14-16 January 2014, Somerset West.
To appear
Journal publications
1. Moutlana MK and Adali S (2014) Vibration of a Cantilever Beam with extended tip
mass subject to piezoelectric control R&D Journal SAIMechE Stellenbosch.
(Corresponding author: MK Moutlana)
Submitted
2. Moutlana MK and Adali S (2014) Effect of piezo voltage polarity on the frequencies and
frequency gaps of piezoelectric beams.
In preparation
In these publications, I, MK Moutlana was the main author and Prof. S Adali was the
supervisor of MSc research.
Signed:……………………………………..….(MK Moutlana) Date:……………

iv
Acknowledgments
I would like to thank Prof. Sarp Adali for supervising my research in this project and for his
support. His knowledge, guidance and experience has encouraged and motivated me
throughout my research. I would like to thank my family: Rose my wife, the kids Keletso,
Tswelopele and Thato for their support and inspiration. I would also like thank my parents
who remain a shining beacon in my life. I love you very much.

v
Abstract Summary: This work provides a study of the natural frequencies of a cantilevered beam
with tip mass and axial load. Displacement feedback control is applied using piezo actuators
attached to the top and bottom of the beam. The center of gravity of the mass and its rotary
inertia are accounted for in the solution.
Abstract: The analysis of flexible components is essential to provide for the successful
design of various engineering structures. This study provides an analytical solution to the
dynamic behavior of a cantilevered beam carrying a mass at the free end, while being
subjected to constant axial load. The structure is modeled using the Euler-Bernoulli theory
and the contributions of the mass, thickness and stiffness of the piezoelectric actuators to the
structure are taken into account. The effects of the piezo input voltage polarity is also taken
into account.
The natural frequencies of the beam can be altered by applying a voltage in the desired
polarity and thereby causing an extension or contraction in the piezo actuator. This
mechanical response alters the frequencies of the piezoelectric beam. The piezoelectric effect
causes a compression or extension strain when a voltage is applied along the direction of
polarization. The strain in the piezoelectric beam causes a moment at the free end, which
directly affects the natural frequencies. By applying a voltage in the same or opposite
direction of the poling of the piezo, the result is a compression or extension perpendicular to
the poling. An applied voltage in the same direction can be considered positive and reduces
the frequencies, whilst in the opposite direction negative and increases the natural
frequencies. In this investigation the piezo layer thickness is varied, which in turn allows for
a variable voltage input. For a thicker layer, the voltage can be increased and the actuation
strain increased.
The frequency content of the dynamically varying forces applied to a structure has the
potential to excite the structure at one or more of its natural frequencies. Using piezo
actuators, the natural frequencies and the natural frequency gaps can be maximized.
Maximizing the natural frequencies is useful to avoid resonance when the external excitation
frequency is less than the natural frequency.
Keywords: Piezo, vibrations, natural frequencies, Euler-Bernoulli, tip mass, axial load.

vi
Table of Contents
Declaration 1 .......................................................................................................................... ii
Supervisor: ......................................................................................................................... ii
Candidate ........................................................................................................................... ii
Declaration 2 ........................................................................................................................ iii
Conferences ...................................................................................................................... iii
Journal publications ......................................................................................................... iii
Acknowledgments ................................................................................................................ iv
Abstract ................................................................................................................................ v
List of figures ........................................................................................................................ ix
List of figures in appendix ................................................................................................... xii
List of tables ....................................................................................................................... xiii
List of tables in appendix .................................................................................................... xvi
Nomenclature ..................................................................................................................... xvii
Chapter 1 – Introduction ...................................................................................................... 20
1.1 Background and motivation ................................................................................. 20
1.2 Literature review .................................................................................................. 23
1.3 Research objectives .............................................................................................. 30
Chapter 2 – Piezoelectric composite beam .......................................................................... 33
2.1 Derivation of the governing equations for the beam and the piezo layers ........... 33
2.1.1 Moment-curvature relation for beam ................................................................... 33
2.1.2 Governing equations for composite beam ........................................................... 36
2.1.3 Constitutive equations for piezo layers ................................................................ 37
2.2 Solution of the governing equations by separation of variables .......................... 48
2.3 Boundary conditions ............................................................................................ 51
2.4 Determination of the natural frequencies of the beam ......................................... 54
2.5 Orthogonality of the modes .................................................................................. 60

vii
Chapter 3 - Computation of the natural frequencies ......................................................... 66
3.1 Natural frequencies for a cantilevered beam ....................................................... 66
3.2 Natural frequencies for a beam with tip mass and axial load............................... 67
3.2.1 First natural frequencies (ω1) ............................................................................... 67
3.2.2 Second natural frequencies (ω2) ......................................................................... 71
3.2.3 Third natural frequencies (ω3) ............................................................................. 74
3.2.4 Fourth natural frequencies (ω4) ............................................................................ 78
3.3 Change in natural frequencies for varying axial load, tip mass and voltage ........ 81
3.3.1 First natural frequencies (fundamental mode) ..................................................... 81
3.3.2 2nd, 3rd and 4th Natural frequency (higher modes) ................................................ 85
3.4 Natural frequencies versus change in tip mass ..................................................... 85
3.5 Percentage change in natural frequencies with change in axial load ................... 95
Chapter 4 – Computation of frequencies with an extended tip mass ............................... 99
4.1 Determination of the natural frequencies for a beam with an extended tip mass
and tip inertia ........................................................................................................ 99
4.2 Natural frequencies for a beam with extended tip mass..................................... 103
4.3 Fundamental frequencies for a beam with an extended tip mass and rotary inertia
............................................................................................................................ 106
4.3.1 Natural frequencies of a beam with a tip mass, b1 = 0 ....................................... 106
4.3.2 Natural frequencies of a beam with extended tip mass and rotary inertia for
b1 = L/2 ............................................................................................................... 111
4.3.3 Natural frequencies of a beam with extended tip mass and rotary inertia for
b1 = L/1 ............................................................................................................... 114
Chapter 5 – Effect of actuator thickness and voltage polarity on the frequencies ........ 119
5.1 Fundamental frequencies for a beam with different actuator thicknesses ......... 119
5.2 Effect of voltage polarity on frequencies ........................................................... 123
5.2.1 Increase in the fundamental frequency .............................................................. 123

viii
5.2.2 Increase in frequency gap between the fundamental and second natural frequency
.......................................................................................................................... 125
Chapter 6 – Mode shapes of vibrating piezoelectric beam .............................................. 130
6.1 First mode shapes for a beam with a concentrated tip mass .............................. 130
6.2 Mode shapes for a beam with an extended tip mass and rotary inertia (b1 > 0) 135
Chapter 7 – Dynamic behaviour of a piezoelectric beam subject to initial conditions . 137
7.1 Initial value problem and the eigenfunction expansion series ........................... 137
7.2 Convergence of the eigenfunction series expansion .......................................... 140
7.3 Complete dynamic solution ................................................................................ 144
7.4 Oscillation of the beam for b1 = 0 ...................................................................... 150
7.5 Oscillation of the beam for b1 = L/2 ................................................................... 153
7.6 Oscillation of the beam for b1 = L/1 ................................................................... 155
7.7 Amplitude spectrum for the cantilevered beam ................................................. 157
Chapter 8 – Conclusions ...................................................................................................... 163
8.1 Conclusion .......................................................................................................... 163
8.2 Future research ................................................................................................... 165
Bibliography ......................................................................................................................... 166
Appendix ............................................................................................................................... 172
A1. Second natural frequencies. ....................................................................................... 172
A2. Third natural frequencies. .......................................................................................... 175
B1. Natural frequencies with b1 = L/10. ........................................................................... 181
B2. Natural frequencies with b1 = L/5. ............................................................................. 183
C1. Mode shapes 0V and 1000V for η = 0 ....................................................................... 185
C2. Mode shapes for different tip masses k = 0 ................................................................ 187

ix
List of figures
Figure 2.1: Uniform beam under free vibration ...................................................................... 33
Figure 2.2: Single deformed fiber(s) along the length of the beam ........................................ 34
Figure 2.3: Internal shear forces, moments and external forces on the beam ......................... 36
Figure 2.4: Cross-sectional area of beam ................................................................................ 37
Figure 2.5: Cross-sectional area of beam indicating the dimensions of the composite .......... 39
Figure 2.6: Beam with concentrated mass at the free end ...................................................... 53
Figure 2.7: Cantilever sandwiched between two piezo electric actuators .............................. 54
Figure 2.8: Compression and Extension due to piezo material poling and input voltage
polarity for piezo ................................................................................................ 58
Figure 3.1a: Change in fundamental frequency vs axial Load ratio: Voltage = 0V ............... 67
Figure 3.1b: Change in fundamental frequency vs axial load ratio: Voltage = 100V ............ 68
Figure 3.1c: Change in fundamental frequency vs axial load ratio: Voltage = 500V ............ 69
Figure 3.1d: Change in fundamental frequency vs axial load ratio: Voltage = 1000V .......... 70
Figure 3.2a: Change in 2nd frequency vs axial load ratio: Voltage = 0V ................................ 71
Figure 3.2b: Change in 2nd frequency vs axial load ratio: Voltage = 100V............................ 72
Figure 3.2c: Change in 2nd frequency vs axial load ratio: Voltage = 500V ............................ 73
Figure 3.2d: Change in 2nd frequency vs axial load ratio: Voltage = 1000V.......................... 74
Figure 3.3a: Change in 3rd frequency vs axial load ratio: Voltage = 0V ................................ 75
Figure 3.3b: Change in 3rd frequency vs axial load ratio: Voltage = 100V ............................ 76
Figure 3.3c: Change in 3rd frequency vs axial load ratio: Voltage = 500V ............................ 77
Figure 3.3d: Change in 3rd frequency vs axial load ratio: Voltage = 1000V .......................... 77
Figure 3.4a: Change in 4th frequency vs axial load ratio: Voltage = 0V ................................ 78
Figure 3.4b: Change in 4th frequency vs axial load ratio: Voltage = 100V ............................ 79
Figure 3.4c: Change in 4th frequency vs axial load ratio: Voltage = 500V ............................ 80
Figure 3.4d: Change in 4th frequency vs axial load ratio: Voltage = 1000V .......................... 81
Figure 3.5a: Percentage change in natural frequency (η = 0) ................................................. 83
Figure 3.5b: Percentage change in natural frequency (η = 0.1) .............................................. 83
Figure 3.5c: Percentage change in natural frequency (η = 1) ................................................. 84
Figure 3.5d: Percentage change in natural frequency (η = 5) ................................................. 84
Figure 3.6a: 1st Frequency vs tip mass ratio: Voltage = 0V.................................................... 86
Figure 3.6b: 1st Frequency vs tip mass ratio: Voltage = 100V ............................................... 87

x
Figure 3.6c: 1st Frequency vs tip mass ratio: Voltage = 500V................................................ 87
Figure 3.6d: 1st Frequency vs tip mass ratio: Voltage = 1000V ............................................. 88
Figure 3.7a: 2nd Frequency vs tip mass ratio: Voltage = 0V ................................................... 88
Figure 3.7b: 2nd Frequency vs tip mass ratio: Voltage = 100V .............................................. 89
Figure 3.7c: 2nd Frequency vs tip mass ratio: Voltage = 500V ............................................... 90
Figure 3.7d: 2nd Frequency vs tip mass ratio: Voltage = 1000V ............................................ 90
Figure 3.8a: 3rd Frequency vs tip mass ratio: Voltage = 0V ................................................... 91
Figure 3.8b: 3rd Frequency vs tip mass ratio: Voltage = 100V ............................................... 91
Figure 3.8c: 3rd Frequency vs tip mass ratio: Voltage = 500V ............................................... 92
Figure 3.8d: 3rd Frequency vs tip mass ratio: Voltage = 1000V ............................................. 92
Figure 3.9a: 4th Frequency vs tip mass ratio: Voltage = 0V ................................................... 93
Figure 3.9b: 4th Frequency vs tip mass ratio: Voltage = 100V ............................................... 93
Figure 3.9c: 4th Frequency vs tip mass ratio: Voltage = 500V ............................................... 94
Figure 3.9d: 4th Frequency vs tip mass ratio: Voltage = 1000V ............................................. 94
Figure 3.10a: Changes in the natural frequency (ω1) vs axial load for V = 0V ...................... 97
Figure 3.10b: Changes in the natural frequency (ω1) vs axial load for V = 100V .................. 97
Figure 3.10c: Changes in the natural frequency (ω1) vs axial load for V = 500V .................. 97
Figure 3.10d: Changes in the natural frequency (ω1) vs axial load for V = 1000V ................ 97
Figure 3.11a: Changes in the natural frequency (ω2) vs axial load for V = 0V ...................... 98
Figure 3.11b: Changes in the natural frequency (ω2) vs axial load for V = 1000V ................ 98
Figure 3.12a: Changes in the natural frequency (ω3) vs axial load for V = 0V ...................... 98
Figure 3.13a: Changes in the natural frequency (ω4) vs axial load for V = 0V ...................... 98
Figure 3.12b: Changes in the natural frequency (ω3) vs axial load for V = 1000V ................ 98
Figure 3.13b: Changes in the natural frequency (ω4) vs axial load for V = 1000V ................ 98
Figure 4.1: Cantilever beam with an extended tip mass ......................................................... 99
Figure 4.2: Lowest Natural frequencies of system at k = +0.8 and η = 10 ........................... 105
Figure 4.3a: Natural frequency vs axial load and tip mass for b1 = 0 and V = 0V ............... 107
Figure 4.3b: Natural frequency vs axial load and tip mass for b1 = 0 and V = 100V ........... 108
Figure 4.3c: Natural frequency vs axial load and tip mass for b1 = 0 and V = 500V ........... 109
Figure 4.3d: Natural frequency vs axial load and tip mass for b1 = 0 and V =1000V .......... 110
Figure 4.4a: Natural frequency vs axial load and tip mass for b1 = L/2 and V = 0V ............ 111
Figure 4.4b: Natural frequency vs axial load and tip mass for b1 = L/2 and V =100V ........ 112
Figure 4.4c: Natural frequency vs axial load and tip mass for b1 = L/2 and V =500V ........ 113
Figure 4.4d: Natural frequency vs axial load and tip mass for b1 = L/2 and V =1000V ....... 114

xi
Figure 4.5a: Natural frequency vs axial load and tip mass for b1 = L//1 and V = 0V ........... 115
Figure 4.5b: Natural frequency vs axial load and tip mass for b1 = L//1 and V =100V ........ 116
Figure 4.5c: Natural frequency vs axial load and tip mass for b1 = L//1 and V = 500V ....... 117
Figure 4.5d: Natural frequency vs axial load and tip mass for b1 = L/1 and V =1000V ....... 118
Figure 5.1: 1st Natural frequency vs axial load for different voltages (b1 = 0)..................... 120
Figure 6.1: 1st Mode shape of vibration with inactive piezo actuators for Voltage = 0V ..... 131
Figure 6.2: 1st Mode shape of vibration with active piezo actuators for Voltage = 1000V .. 132
Figure 6.3: 1st Mode shape of vibration with inactive piezo actuators for Voltage = 0V ..... 133
Figure 6.4: 1st Mode shape of vibration with active piezo actuators for Voltage =1000V ... 134
Figure 7.1: Convergence of eigenfunction expansion for Voltage = 0V .............................. 141
Figure 7.2: Convergence of eigenfunction expansion for Voltage = 0V .............................. 142
Figure 7.3: Convergence of eigenfunction expansion for Voltage =1000V ......................... 143
Figure 7.4: Convergence of eigenfunction expansion for Voltage =1000V ......................... 144
Figure 7.5: Right angled triangle that shows the relation between (ø) and (G) .................... 149
Figure 7.6: Phase angle (ø) and period ( ) of oscillation ..................................................... 149
Figure 7.7: Frequencies for controlled and uncontrolled beams for b1 = 0. (a) η = 0,
(b) η = 0.1, (c) η = 1 and (d) η = 5 ...................................................................... 152
Figure 7.8: Frequencies for controlled and uncontrolled beams for b1 = L/2. (a) η = 0,
(b) η = 0.1, (c) η = 1 and (d) η = 5 ...................................................................... 154
Figure 7.9: Frequencies for controlled and uncontrolled beams for b1 = L/1. (a) η = 0,
(b) η = 0.1, (c) η = 1 and (d) η = 5 ...................................................................... 156
Figure 7.10: (a) to (d): Oscillation of uncontrolled beam and controlled beams.
(e) to (h): Amplitude spectrum of uncontrolled beams. (i) to (l): Amplitude
spectrum of controlled beams; η = 0 0V 1000V.............................. 159
Figure 7.11: (a) to (d): Oscillation of uncontrolled beam and controlled beams.
(e) to (h): Amplitude spectrum of uncontrolled beams. (i) to (l): Amplitude
spectrum of controlled beams; η = 0.1 0V 1000V........................... 160
Figure 7.12: (a) to (d): Oscillation of uncontrolled beam and controlled beams.
(e) to (h): Amplitude spectrum of uncontrolled beams. (i) to (l): Amplitude
spectrum of controlled beams; η = 1 0V 1000V.............................. 161
Figure 7.13: (a) to (d): Oscillation of uncontrolled beam and controlled beams.
(e) to (h): Amplitude spectrum of uncontrolled beams. (i) to (l): Amplitude
spectrum of controlled beams; η = 5 0V 1000V.............................. 162

xii
List of figures in appendix
Figure A1 1: Natural frequency vs axial load: Tip mass ratio (η = 0) ................................... 172
Figure A1 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1) ................................ 172
Figure A1 3: Natural frequency vs axial load: Tip mass ratio (η = 1.0) ................................ 173
Figure A1 4: Natural frequency vs axial load: Tip mass ratio (η = 5.0) ................................ 173
Figure A1 5: Natural frequency vs axial load: Tip mass ratio (η = 10) ................................. 174
Figure A2 1: Natural frequency vs axial load: Tip mass ratio (η = 0) ................................... 175
Figure A2 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1) ................................ 175
Figure A2 3: Natural frequency vs axial load: Tip mass ratio (η = 1.0) ................................ 176
Figure A2 4: Natural frequency vs axial load: Tip mass ratio (η = 5.0) ................................ 176
Figure A2 5: Natural frequency vs axial load: Tip mass ratio (η = 10) ................................. 177
Figure A3 1: Natural frequency vs axial load: Tip mass ratio (η = 0) ................................... 178
Figure A3 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1) ................................ 178
Figure A3 3: Natural frequency vs axial load: Tip mass ratio (η = 1.0) ................................ 179
Figure A3 4: Natural frequency vs axial load: Tip mass ratio (η = 5.0) ................................ 179
Figure A3 5: Natural frequency vs axial load: Tip mass ratio (η = 10) ................................. 180
Figure B1 1: Changes in the natural frequency vs axial load and tip mass (b1 = L/10) ........ 181
Figure B1 2: Changes in the natural frequency vs axial load and tip mass (b1 = L/10) ........ 181
Figure B1 3: Changes in the natural frequency vs axial load and tip mass (b1 = L/10) ........ 182
Figure B1 4: Changes in the natural frequency vs axial load and tip mass (b1 = L/10) ........ 182
Figure B2 1: Changes in the natural frequency vs axial load and tip mass (b1 = L/5) .......... 183
Figure B2 2: Changes in the natural frequency vs axial load and tip mass (b1 = L/5) .......... 183
Figure B2 3: Changes in the natural frequency vs axial load and tip mass (b1 = L/5) .......... 184
Figure B2 4: Changes in the natural frequency vs axial load and tip mass (b1 = L/5) .......... 184
Figure C1 1: First four mode shapes for k = +0.8 ................................................................. 185
Figure C1 2: .First four mode shapes for k = 0 ...................................................................... 185
Figure C1 3: First four mode shapes for k = -1 ..................................................................... 186
Figure C1 4: First four mode shapes k = -2 .......................................................................... 186
Figure C2 1: Fundamental mode shapes ............................................................................... 187
Figure C2 2: Second mode shapes ........................................................................................ 187
Figure C2 3: Third mode shapes ........................................................................................... 187
Figure C2 4: Fourth mode shapes ......................................................................................... 187

xiii
List of tables
Table 1.1: Four beam theories that are taken into consideration. ............................................ 24
Table 2.1: Material and geometric properties of the composite beam. ................................... 58
Table 2.2: Polarity of voltage input for piezo actuators. ......................................................... 58
Table 3.1a: 1st frequencies of the beam with a tip mass and axial load: Voltage = 0V. .......... 67
Table 3.1b: 1st frequencies of the beam with a tip mass and axial load: Voltage = 100V. ...... 68
Table 3.1c: 1st frequencies of the beam with a tip mass and axial load: Voltage = 500V. ...... 69
Table 3.1d: 1st frequencies of the beam with a tip mass and axial load: Voltage = 1000V. .... 70
Table 3.2a: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 0V. ......... 71
Table 3.2b: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 100V. ..... 72
Table 3.2c: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 500V. ..... 73
Table 3.2d: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 1000V. .. 74
Table 3.3a: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 0V........... 75
Table 3.3b: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 100V. ..... 76
Table 3.3c: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 500V....... 76
Table 3.3d: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 1000V. ... 77
Table 3.4a: 4th frequencies of the beam with a tip mass and axial load: Voltage = 0V. .......... 78
Table 3.4b: 4th frequencies of the beam with a tip mass and axial load: Voltage = 100V. ..... 79
Table 3.4c: 4th frequencies of the beam with a tip mass and axial load: Voltage = 500V. ...... 80
Table 3.4d: 4th frequencies of the beam with a tip mass and axial load: Voltage = 1000V. ... 81
Table 3.5a: 1st Mode frequencies (ω1) with tip mass ratio, η = 0 ............................................ 83
Table 3.5b: 1st Mode frequencies (ω1) with tip mass ratio, η = 0.1 ......................................... 83
Table 3.5c: 1st Mode frequencies (ω1) with tip mass ratio, η = 1 ............................................ 84
Table 3.5d: 1st Mode frequencies (ω1) with tip mass ratio, η = 5 ............................................ 84
Table 4.1: Lowest natural frequencies for k = +0.8 and η = 10. ........................................... 105
Table 4.2a: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 0V. ........ 107
Table 4.2b: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 100V. .... 108
Table 4.2c: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 500V. .... 109
Table 4.2d: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 1000V. .. 110
Table 4.3a: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at 0V. ..... 111
Table 4.3b: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at 100V. 112
Table 4.3c: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at 500V. . 113

xiv
Table 4.3d: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at 1000V.
.......................................................................................................................... 114
Table 4.4a: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at 0V. .... 115
Table 4.4b: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at 100V. 116
Table 4.4c: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at 500V. . 117
Table 4.4d: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at 1000V.
.......................................................................................................................... 118
Table 5.1: Fundamental frequency of a beam with a tip mass (b1 = 0), axial load ratio (k = 0),
beam thickness (hb = 8mm) and top and bottom piezo (h1 = h2 = 2mm). ............ 121
Table 5.2: Fundamental frequency of a beam with a tip mass (b1 > 0), axial load ratio (k = 0),
beam thickness (hb = 8mm) and top and bottom piezo (h1 = h2 = 2mm). ............ 122
Table 5.3: Fundamental frequencies for uncontrolled beam V0=−+V . ................................ 124
Table 5.4: Fundamental frequencies for controlled beam V1000=+−V . .............................. 124
Table 5.5: Fundamental frequencies for controlled beam V2000=+−V . ............................. 124
Table 5.6: Percentage change in fundamental frequency between uncontrolled V0=−+V and
controlled beam V1000=+−V . ............................................................................. 125
Table 5.7: Percentage change in fundamental frequency between uncontrolled V0=−+V and
controlled beam V2000=+−V . ............................................................................. 125
Table 5.8a: 1st frequencies for uncontrolled beam V0=−+V ................................................. 126
Table 5.8b: Reduced 1st frequencies for controlled beam V1000=+−V ............................... 126
Table 5.8c: Reduced 1st frequencies for controlled beam V2000=+−V ............................... 126
Table 5.9a: 2nd frequencies for uncontrolled beam V0=−+V ............................................... 126
Table 5.9b: Reduced 2nd frequencies for controlled beam V1000=+−V .............................. 126
Table 5.9c: Reduced 2nd frequencies for controlled beam V2000=+−V .............................. 126
Table 5.10: Difference between 1st and 2nd frequencies for uncontrolled beam V0=−+V ... 127
Table 5.11: Difference between 1st and 2nd reduced frequencies for controlled beam
V1000=+−V ........................................................................................................ 127
Table 5.12: Difference between 1st and 2nd reduced frequencies for controlled beam
V2000=+−V ........................................................................................................ 127

xv
Table 5.13: Percentage change in frequency gap between uncontrolled V0=−+V and
controlled beam V1000=+−V ………………………..……………………….128
Table 5.14: Percentage difference in frequency gap between uncontrolled V0=−+V and
controlled beam V2000=+−V . ......................................................................... 128
Table 7.1: Tip deflection contribution of individual eigenfunctions with V0=−+V for varying
axial load ratios(k)…………………….……………………...…..…………….145
Table 7.2: Tip deflection contribution of individual eigenfunctions with V0=−+V for varying
mass ratios (η)…. ................................................................................................ 146
Table 7.3: Tip deflection contribution of individual eigenfunctions with V1000=+−V for
varying axial load ratios (k). ............................................................................... 146
Table 7.4: Tip deflection contribution of individual eigenfunctions with V1000=+−V for
varying mass ratios (η). ....................................................................................... 147

xvi
List of tables in appendix
Table A1 1: 2nd Mode frequencies (ω2) with tip ass ratio, η = 0 ............................................ 172
Table A1 2: 2nd Mode frequencies (ω2) with tip ass ratio, η = 0.1 ......................................... 172
Table A1 3: 2nd Mode frequencies (ω2) with tip ass ratio, η = 1 ............................................ 173
Table A1 4: 2nd Mode frequencies (ω2) with tip ass ratio, η = 5 ............................................ 173
Table A1 5: 2nd Mode frequencies (ω2) with tip ass ratio, η = 10 .......................................... 174
Table A2 1: 3rd Mode frequencies (ω3) with tip ass ratio, η = 0 ............................................ 175
Table A2 2: 3rd Mode frequencies (ω3) with tip ass ratio, η = 0.1 ......................................... 175
Table A2 3: 3rd Mode frequencies (ω3) with tip ass ratio, η = 1 ............................................ 176
Table A2 4: 3rd Mode frequencies (ω3) with tip ass ratio, η = 5 ............................................ 176
Table A2 5: 3rd Mode frequencies (ω3) with tip ass ratio, η = 10 .......................................... 177
Table A3 1: 4th Mode frequencies (ω4) with tip ass ratio, η = 0 ............................................ 178
Table A3 2: 4th Mode frequencies (ω4) with tip ass ratio, η = 0.1 ......................................... 178
Table A3 3: 4th Mode frequencies (ω4) with tip ass ratio, η = 1 ............................................ 179
Table A3 4: 4th Mode frequencies (ω4) with tip ass ratio, η = 5 ............................................ 179
Table A3 5: 4th Mode frequencies (ω4) with tip ass ratio, η = 10 .......................................... 180
Table B1 1: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including
the effects rotary inertia at 0V. ............................................................................ 181
Table B1 2: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including
the effects rotary inertia at 100V. ........................................................................ 181
Table B1 3: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including
the effects rotary inertia at 500V. ........................................................................ 182
Table B1 4: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including
the effects rotary inertia at 1000V. ...................................................................... 182
Table B2 1: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including
the effects rotary inertia at 0V. ............................................................................ 183
Table B2 2: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including
the effects rotary inertia at 100V. ........................................................................ 183
Table B2 3: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including
the effects rotary inertia at 500V. ........................................................................ 184
Table B2 4: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including
the effects rotary inertia at 1000V. ...................................................................... 184

xvii
Nomenclature
β – Axial load parameter, (1/m2)
εxx – Strain in the longitudinal direction
ε1 – Strain in the lower piezo due to applied voltage
ε2 – Strain in the top piezo due to applied voltage
η – Dimension-less mass ratio = )( Lmm cT
ρb – Density, (kg/m3)
ρ1 – Density of bottom piezo, (kg/m3)
ρ2 – Density of top piezo, (kg/m3)
σxx – Stress in the longitudinal direction, (N/m2)
ω – Natural frequency, (1/s)
ωn – nth Mode natural frequency, (1/s)
a – Frequency parameter, (1/m)
an – Frequency parameter for nth mode, (1/m)
Ab – Cross-sectional area of beam, (m2)
A1 – Cross-sectional area of bottom piezo, (m2)
A2 – Cross-sectional area of top piezo, (m2)
b(x) – Width of beam, (m)
CA – Combined top and bottom piezo effects, (N)
Ca1 – Piezo constant for bottom piezo, (N)
Ca2 – Piezo constant for top piezo, (N)
Ec – Young’s Modulus for composite/lamina, (N/m2)
Eb – Young’s Modulus for beam, (N/m2)
E1 – Young’s Modulus for piezo at bottom surface, (N/m2)
E2 – Young’s Modulus for piezo at top surface, (N/m2)
f(x,t) – Transverse loading of beam
hb – Height of beam, (m)
h1 – Height of piezo of bottom piezo, (m)

xviii
h2 – Height of piezo of top piezo, (m)
Ib – Moment of inertia for the beam, (m4)
Ic – Moment of inertia for the composite/lamina, (m4)
I1 – Moment of inertia for the piezo at bottom surface, (m4)
I2 – Moment of inertia for the piezo at top surface, (m4)
k – Dimensionless axial load ratio
L – Length of beam, (m)
L – Distance along the beam were inertia is considered, (m)
mc – Mass per unit length of composite, (kg/m)
mT – Mass at tip of beam, (kg)
Mc(x,t) – Moment distribution along the composite, (Nm)
Mb – Moment contribution from the beam, (Nm)
M1 – Moment contribution from the bottom piezo, (Nm)
M2 – Moment contribution from the top piezo , (Nm)
Mp – Piezo moment contribution due to applied voltage, (Nm)
MP1 – Moment contribution from the bottom piezo due to applied voltage, (Nm)
MP2 – Moment contribution from the top piezo due to applied voltage, (Nm)
N(x) – Axial load, (N)
Pcr –Euler’s critical buckling load, (N)
p1, p2 – Characteristic values, (m-1)
p1n, p2n – Characteristic values for nth mode, (m-1)
Q(x,t) – Shear force distribution along the beam, (N)
t – Time, (s)
– Period of oscillation
T(t) – Time function X(x) – Transverse displacement along the length of beam
x – Length-wise coordinate in the x-direction
y – Length-wise coordinate in the y-dir.
w(x,t) – Transverse displacement of beam as a function of time.

xix
Vp1 – Applied voltage for bottom piezo, (V/mm)
Vp2 – Applied voltage for top piezo, (V/mm)

20
Chapter 1 – Introduction
1.1 Background and motivation
Structural mechanics, in a broad sense, is the science concerned with the design of various
structures (e.g. beams, plates, shells, strings, etc.) bearing in mind the strength, stiffness and
stability. In this study we analyze the dynamic behavior of a cantilevered beam subjected to
various loading conditions. Research into the analysis of flexible components is essential to
successful design of robots, machines, space structures and other engineering structures. Due
to the dynamically varying loads experienced by these engineering structures, there is a
potential to excite the structure to a point of resonance. Design engineers should always be
mindful of the natural frequencies of a structure in order to minimize large displacements and
fatigue due vibrations.
In this study we study a cantilevered beam subjected to an axial load. Following that, we will
add a concentrated mass at the free end, and the natural frequencies and mode shapes will be
generated for different loading conditions. A concentrated mass is infinitesimal and therefore
has no volume and this serves as an ideal case to establish a benchmark for investigating a
more realistic case were the mass has some volume. In the latter case the center of gravity of
the mass will not coincide with the free end of the beam and therefore rotary inertia will be
taken into account.
This research demonstrates how we can alter the vibration characteristics of a cantilevered
beam with a mass at the free end and an axial load using piezo actuators. Piezo materials can
be described in the electro-mechanical context under the field of piezoelectricity.
Piezoelectricity is a charge that accumulates in certain materials when they are subjected to
some form of structural deformation. The other more attractive property of piezo material is
that these materials will deform when subjected to an electric field. This phenomenon is
called the piezoelectric effect. Piezoelectric materials can be manufactured such that the
piezoelectric effect is totally reversible; meaning that, if a material is subject to an electric
field it will deform and as soon as the electric field is removed it goes back to its original
shape. The converse is also true, that if we subject a material to an external load, an electric
field will build up and as soon as we remove the load the electric field vanishes. When an

21
electric field is applied to a material the strain generated can be used to change the shape of
the structure. Also, when a piezo material is deformed, a voltage is generated which can be a
measure for assessing the extent of the deformation. This property of piezo-electric materials
can be utilized such that the materials can be employed as a sensor or an actuator.
Lead-Zirconate-Titanate(PZT) ceramics were discovered in 1954 and have been widely used
depending on the desired physical effects in the system. The piezoelectric effect will
manifest itself in four forms i.e. sensors, generators, actuators and transducers. Sensors and
generators will produce an electric charge due to an applied external load. When used as
sensors, the magnitude of the electric charge can be used to determine the extent of the
deformation and when used as generators we can harvest parasitic mechanical energy due to
vibration for storage to run small electric circuits. Piezo material can generate large amounts
of force (in the order of 1000 Newtons) at extremely small strokes in piezo stacks, for
instance; and can therefore be used as actuators. With a combination of sensing and actuating
we can design transducers were both the direct piezoelectric effects and its inverse are used to
our advantage.
In order to alter the dynamic characteristics of the cantilever with the end condition as
mentioned above, a piezo material layer of uniform width is attached to the top and the
bottom of the beam to form a composite structure. By applying and electric field to the piezo
layers the strain induced at the top and bottom of the beam has an effect on the natural
frequencies of vibration of the structure. In this study we will demonstrate that we can alter
the natural frequency and quantify the extent of those changes.
This control strategy assists us in altering the natural frequencies of the structure using
piezoelectric actuators. This is referred to as active control, whereas in passive control, the
structure is built to absorb the external energy input thereby reducing the energy dissipation
by the primary structure. Passive control tends to add more mass on the structure in the form
of springs, shock absorbers and dampers. This is undesirable in space structures since one
has to minimize the load/cargo one can carry to space. Piezoelectricity technology has also
found various applications in modern technologies including the transport industry. The
piezoelectric effect is being used in engineering structures to determine the health of
structures and monitor performance.

22
Knock sensors, distance sensors and fuel injection systems employ piezo technology in
current designs of land transportation. Piezo material can be used as an accelerometer to
measure the seismic changes between a vibrating structure and a mass. The piezo material
converts the vibrations into electric pulses which can be measured to determine the dynamics
of the system. Distance sensors employ the same principle in terms of detecting back and
forward movement. In fuel injection systems it has been found that piezo electric material
provide much quicker response time than conventional magnetic technologies, where fuel
consumption could be lowered and efficiency improved significantly. Noise reduction can
also be achieved in the cabins of transportation vehicles by attenuating the external vibrations
of wings, rotor blades, engine parts, etc.
In the aviation industry piezo materials are gaining prominence in various applications in
structural defect monitoring, cabin noise reduction, energy harvesting, vibration control of the
wings, rotors, etc. This research will demonstrate the effectiveness of piezo actuators in
changing the natural frequencies of a cantilevered beam carrying a mass at the free end while
being subjected to a uniform axial load. The findings of this research will be useful in
application such as wings design for fixed wing planes and also provide some insights into
the design of helicopter rotor blades. As the rotor blades turn on a helicopter, an axial load
directed at the pivot is induced which is analogous to the model being investigated in this
research. Micro Air Vehicles (MAV) and Unmanned Aerial Vehicles (UAV) which are used
in military reconnaissance and surveillance have improved significantly in performance under
extreme environments as a result of research conducted into the use of smart (piezo-electric)
materials (Janker et al., 2008). Piezo-electric technology has proven to be very effective in
solving these vibration problems due its light weight, reliability, can be incorporated in the
structure (as in composites) and provide structural intelligence (act as both sensors and
actuator).
In this investigation we examine a cantilevered beam with a tip mass while being subjected to
an axial load. To this end, we derive the equation of motion governing transverse
displacements of the beam and solve the equations analytically to arrive at a closed-form
solution. The method of separation of variables is used to solve the differential equations of
motion to generate the eigenvalues and the eigenfunctions. By inducing a potential across the
piezo actuators it is demonstrated that there is a significant change in the frequencies of the
structure under certain loading conditions.

23
1.2 Literature review
The Euler-Bernoulli model dates back to the 18th century, when two researchers discovered
that the curvature along an elastic beam subjected to bending is proportional to the bending
moment at that point. Daniel Bernoulli (1700-1782) was a pioneer in developing the
differential equations to describe the vibrations of a beam. Leonhard Euler (1707-1783)
investigated the shape of elastic columns under various loading condition and together they
proposed what is known as the Euler-Bernoulli beam theory which is sometimes called:
Bernoulli-Euler beam theory, Euler beam theory, Bernoulli beam theory or the classic beam
theory (Magrab, 2007).
This theory is one of the most commonly used due to its simplicity and provides reasonable
engineering approximations to a multitude of problems encountered in vibration of slender
beams. The Euler-Bernoulli theory tends to overestimate the frequencies compared to other
theories that were later developed, i.e. the Rayleigh beam theory (1877) and Timoshenko
beam theory (1922), according to Meirovitch (2001). The theories mentioned above can be
summarized in Table 1.1 below where the following basic assumptions are taken into account
(Hans et al., 1999):
1. The length of the beam is much larger than the width and thickness
2. The material conforms to Hooke’s law
3. The effects underlined by Poisson are insignificant
4. The neutral and the centroidal axes coincide
5. The neutral axis remains perpendicular to the cross-sectional planes after deformation
6. The small angle assumption can be used due to small angular rotations.
The Rayleigh beam theory provides an improvement in the Euler-Bernoulli beam theory by
taking into account the effects of the rotation of the cross-section and as a result, it corrects
the error in overestimation encountered when using the classic beam theory
(Meirovitch, 2001). The Rayleigh models have also been employed for static analysis and
later extended for dynamic analysis (Kim and Jones, 1991).

24
Table 1.1: Four beam theories that are taken into consideration.
Beam theory Bending moment
Lateral displacement
Shear deformation
Rotary inertia
Euler-Bernoulli X X 0 0 Rayleigh X X 0 X
Shear X X X 0 Timoshenko X X X X
Piezoelectric materials were discovered in the early 1880 by Jacques Currie and Pierce
Currie. These materials have found great use in the post-World War II era in applications
ranging from audio speakers, gas stove igniters, electric motors, aerospace and satellite
technologies, where they are utilized as actuators and sensors (Sadek et al., 2009). The
piezoelectric effect has been proven to be effective in shape control of engineering structures
due to its ability to behave as an actuator. When used as an actuator, the applied voltage
across the piezoelectric produces a strain. Kapuria and Alan (2006) studied a one
dimensional hybrid piezoelectric beam to analyze the electric degrees freedom and the
accuracy of the model is verified using ABAQUS as a benchmark. Further studies were
performed by Weinberg (1999) to describe in detail one-dimensional analysis of piezoelectric
bending actuators using energy methods.
Shudong and Siyuan (2012) extended the study of unimorphs with a rigid mass while
observing the behaviour of the beam under free vibration. Piezoelectric beams can be
classified into unimorphs, bimorphs and triple or multi-layer benders (Devoe and Pisano,
1997). Unimorphs are beams with a piezo layer attached to the bottom or the top of the
elastic column, a bimorph has a piezo actuator on the bottom and top of the elastic column
and a multi-layer can have different lay-ups. Multi-layer piezo or multi-morph beams were
investigated by Lee et al., (2005) to obtain the natural frequencies and maximum
displacement; and the theoretical and experimental results were found to be in agreement.
Emerging technologies such as micro air vehicles, micro robotics that require a large force to
mass ratio and high displacements are constantly being advanced with the incorporation of
piezo actuators (Wood et al., 2005).
Recent applications of piezoelectricity have been focused on energy harvesters, where the
piezo materials are used to scavenge energy from vibrating machines. The strain due the
amplitudes of vibration are converted into an electric field and the energy from the induced

25
electric potential can be used to power equipment such as remote sensors, monitoring
equipment, cabin equipment in vehicles and low power electric devices. The use of piezo
ceramics in converting ambient vibrations into electricity is arguably one of the most studied
topics in the field of vibrations (Cook-Chennault et al., 2008). These materials convert an
electric signal to physical motion by causing a strain in the direction of polarization of the
piezoelectric material and visa-versa. The piezo is transversely isotropic and is poled in the
thickness direction (y-dir). The poling direction determines whether the piezo actuator
undergoes a contraction or expansion in the x-z plane perpendicular to the y-direction.
The strain in the piezoelectric actuators depends on the polarity of the input. The piezo
actuator in a composite beam undergoes a longitudinal tensile or compressive load depending
on the induced voltage. The electrical input connections can be arranged in a parallel or
series configuration depending on the desired directions of the input voltage polarities, which
causes longitudinal contraction or expansion strain effects on the piezo electric benders as
observed by Lumentut and Howard (2011). For example, when the piezo element is not
deformed and the poling direction is perpendicular to the piezo actuator length, the poling
direction can be considered to be in the positive y-axis direction. Consequently, if a positive
voltage is applied to the piezo, the polarization behaves in the same direction to the poling
direction resulting in a compressive stress in the longitudinal direction of the beam and if a
negative voltage is applied the polarization behaves in the opposite direction of the poling
direction resulting in a tensile stress. The piezo actuator circuitry can be wired to
accommodate and adjust the varying polarities.
The constitutive relations for parallel and series connections are explored in more detail by
Park and Moon (2004). The application of the electric field to the actuators can be
accomplished using several traditional methods, where the first method requires only a single
voltage source. For a series configuration, the same voltage field is applied across the top
and bottom actuator and the poling direction of the piezoelectric material is opposite. In a
parallel configuration, the center electrode is grounded and a voltage is applied to the outer
electrodes (Wang et al., 1999). The difference in these two approaches is that for series
configurations, twice the voltage is required for the same amount of strain as opposed to a
parallel configuration. The voltage field can be applied independently to the top and bottom
piezo actuator by using dual voltage sources, where the sources are 180o out of phase with

26
each other. The application of the field for each actuator must take into account the poling
direction of the piezoelectric layer.
The piezoelectric material inputs are interchangeable, i.e. for a voltage input the result is a
strain and for a strain input, the result is a voltage. As a result of this property, if a
piezoelectric material experiences a compressive strain in the longitudinal direction a voltage
is produced in the poling direction of the material and a tensile strain produces a voltage in
the opposite direction (Shu and Lien, 2006). The induced strain can be used to cause a
desired motion on the surface of a structure and therefore manipulate the vibration
characteristics of the structure (Bailey and Hubbard, 1985). This unique characteristic of
these materials have been exploited in vibration control of space structures. This is attributed
to the vacuum environment, where modern materials being used lack other means of damping
vibrations such as air drag. PZT transducers are manufactured on a ceramic based on
titanates of barium or lead zirconia.
Piezoelectric ceramics are composed of small perovskite crystals. These crystals are made up
of a small tetravalent metal ion in a lattice of large divalent metal ions. The small tetravalent
metal ion is normally titanium or zirconium and the large divalent metal ion is usually lead.
Each of these perovskite crystals exhibits a dipole moment after processing
(APC International LTD, 2013). The manufacturing of PZT ceramics involves the mixing of
fine powders of the constituent metal oxides in appropriate quantities. The homogenous
powder is then combined with an organic binder and the necessary shape or form of
transducer is produced, for example, disks, plates and strips.
These shapes are heated for a specific time at a desired temperature causing the powder to
sinter. At a temperature just below melting, the atoms in the powder diffuse and the powder
material forms a dense crystalline structure (PI Ceramics GmbH, 2013). When a voltage
potential is applied across the PZT ceramic material above Curie temperature the crystals
remain in a simple cubic symmetry and do not exhibit a dipole moment. When the
temperature drops below the Curie point, the crystals exhibit a dipole moment due to the
tetragonal symmetry of the structure. The adjoining crystals form regions of local alignment
called domains. The aligned domains stretch by a small amount within the micrometer range
in the poling direction, resulting in a residual strain in the piezo material after the poling
voltage potential is removed (APC International LTD, 2013).

27
The combined domains cause a net dipole moment and thus a net polarization. The
application of this electric potential below the Curie point is called poling. When the electric
field is removed the domains remain locked and the material is permanently polarized. The
poling of the domains is what gives the material the piezoelectric effect. The rigidity of these
ceramic materials makes them especially suited for converting electric energy into
mechanical work and vice versa. A comprehensive review and discussion of these smart
materials is available in various publications by Banks et al., (1996), Smith (2005) and
Preumont (2011).
There are detailed models of actuation using piezoelectric transducers have that been
presented by (Bailey and Hubbard, 1985; Crawley and de Luise, 1990; Drozdov and
Kalamkarov, 1996). In earlier beam theory, according to the theories mentioned above, it
was assumed that the cross-sectional area is symmetric so that the neutral and the centroidal
axes coincide. For non-symmetric beams it is critical that the moment of inertia of the tip
mass should be expressed at the end of the beam which would require a shift of the centroidal
mass moment of inertia to this point (Meriam and Kraige, 2001). Since the beam is made up
of different materials, the varying material stiffness’s in the composite will require that the
location of the modulus weight should be determined to indicate the neutral axis of the
composite (Lin and Huang, 1999).
PZT piezo actuators are used widely in the vibration control and are preferred because of
their mechanical power to produce a controlling force and mechanical simplicity
(Sadek et al., 2009). Improved actuation can be achieved more effectively with ceramic
piezoelectric materials due to fast response time. Piezo material actuators are highly reliable
and can withstand billions of cycles without experiencing significant deterioration in
mechanical performance. Due to the high modulus of elasticity of ceramics, the stiffness of
the actuators has to be taken into consideration and also the fact that the lamina may be non-
symmetric. New models were explored by several engineers including
Brissaud et al., (2003), where one has to take into account the position of the neutral axis in
the analytical model. These models were developed for non-symmetric actuation, were the
piezoelectric actuator is bonded to the top or bottom surface of the beam. It is compulsory to
account for the elastic and geometric parameters in the analysis of non-symmetric bimorph
actuators. In addition, the analytical model for a clamped free bimorph shows that the

28
increase in electrode thickness causes a decrease in transverse free end displacement
according to Brissaud et al., (2003). The electrodes of the piezo material are bonded
perfectly to the piezo actuator and column. The thickness of the electrodes is very small (in
the range of 0-10μm) compared to the piezo layers and the column such that the deformations
are small and the material behaviour is assumed linear. The material geometric and
dissipative non-linearities are not pronounced according to Stanton et al., (2010).
Many models have been developed in recent years, but most of these models placed more
emphasis on the control of a single end condition. For example, Burke and Hubbard (1987)
developed a simply supported model with an axial load, Pourki (1993) developed a models to
investigate different piezo patch geometric shapes that could be utilized to achieve maximum
vibration control, Yim and Singh (2002) developed a model for a cantilever with a linear
spring at the free end and Mansou et al., (2010) developed models for energy harvesting from
ambient structural vibrations. The following assumptions can be made with regards to the
voltage induced piezo layers (Oliviera et al., 2004):
1. Strain distribution is constant along the thickness
2. Strain distribution is linear through the thickness
3. Effects of the bonding layer are negligible (shear-lag is negligible)
4. The piezo actuator induces strain in the x-direction only
A detailed survey of sandwich structures with piezoelectric materials used for vibration
control and vibration suppression is outlined in publications by Benjeddou (2000) and
Trindale et al., (2002). The majority of these publications are devoted to the analysis of
linear models used to describe the mechanical behavior of piezo composites or piezo
laminated structures. Belouettar et al., (2008) have advanced these investigations to cover
the areas of nonlinear vibrations of sandwiched beams. Dunsch and Breguet (2007)
presented a unified approach using superposition of piezoelectric action on the moments and
forces acting on the bender, enabling the determination of strains and stresses at different
points along the piezoelectric bender. The analytical model developed in this unified
approach can be utilized to systematically optimize the various parameters.
Previous work by Fridman and Abramovich (2007) focused on the behavior of a composite
beam subject to external loading condition and its behavior as the applied load approaches the

29
critical buckling load. Their findings included the fact that with different lay-ups one could
manipulate the critical buckling load for a beam. The maximum compressive load applied to
the beam can be reduced to a fraction of the critical buckling load determined from the
properties of the host material, e.g. aluminium. Piezoelectric composite beams undergo a
compressive axial load when a voltage is applied in the poling direction. The induced axial
load in the longitudinal directions will affect the critical buckling load. This buckling
phenomenon is categorized into two different forms: divergence and flutter according to
Naschie MSEL (1990). Divergence occurs when the natural frequency is zero and flutter
occurs when two natural frequencies combine and this is referred to as Beck’s problem
(Rezazadeh et al., 2009).
There have been recent investigations performed on a cantilevered beam with tip mass.
Mei (2011) used a wave-based approach to study the effects of a lumped mass on the
vibration of a cantilevered beam. In this study, the effects of rotary inertia on the beam and
the lumped mass were included and the vibrations of the structure were not controlled. This
approach allowed for the determination of the modes of vibration and the effects of the
lumped mass.
Gökdağ and Kopmaz (2005) investigated coupled bending and torsional vibration on beam
with different end attachments. A concentrated tip mass was applied to beams of varying
cross-sections and therefore various centroidal axes, to quantify the effects on the natural
frequencies. Further studies have been conducted where the moment of inertia of the tip
mass contains some of the geometric characterization of the tip mass volume in case the point
mass assumption fails due to a relatively large mass (Erturk, 2012). In this study, the
distance to the centroid of the extended mass is included in the analysis to determine the
effects on the frequencies of vibration.
Boundary value problems governing the vibration of beams can be solved by using the
method of separation of variables (Edwards Jr., 1989). This technique involves determining
the eigenvalues and eigenfunctions that satisfy the differential equation of motion, the
boundary condition and the initial values. These eigenfunctions provide an accurate
approximation to a controlled vibration case (Kayacik et al., 2008). The resultant
eigenfunctions form a complete solution that resembles a set of harmonics, each with its own
amplitude and unique frequency. The analysis of these harmonics can be accomplished by

30
means of the approach used by de Silva (2000), by defining the amplitude and frequency of
each eigenfunction to determine its effect on the overall dynamics of the vibration.
Boundary control of the beam is achieved by means of distributed parameter system (DPS)
where the piezo actuator functions appear as moments at the boundaries (Sadek et al., 2009).
Distributed parameter control with discreet actuators may lead to the truncation of the model
whereas distributed parameter control with distributed parameter actuators avoids these
pitfalls according to Bailey and Hubbard (1985). The direct and reverse effects of uniformly
distributed piezoelectric layer modeling have been studied by Gaudenzi et al., (2000) and
Qiu et al., (2007). The displacement feedback employed in this investigation can be used in
the vibration to control the distributed parameter system and this is demonstrated in the
studies by Inman (2001) and Gardonio et al., (2005).
1.3 Research objectives
The aim of this investigation is to develop a model to simulate the vibration characteristics of
a cantilevered piezoelectric beam with tip mass and axial load. The cantilevered beam is a
composite beam with piezo actuator bonded to the top and bottom surface. The piezo
actuators are utilized to modify the vibration characteristics of the system. In order to
achieve the aim of controlling and analyzing the vibration characteristics of the model using
piezoelectric actuators the following objectives must be met,
1. Development of the piezo-beam equations using the constitutive relations of
piezoelectric materials
2. Development of the equations of motion governing the vibration of the piezo beam
3. Simulations to compare the frequencies of uncontrolled and controlled beam
4. Computation of the percentage changes in frequency for uncontrolled and controlled
beam
5. Investigation of the effects of piezo layer thickness
6. Investigation of the effects of voltage input polarity for the different layers with a
view to increase frequency gaps
7. Investigation of the vibration of the beam subject to initial conditions

31
In this dissertation we will not study the shear deformations in the beam but rotary inertia is
included when a tip mass is added to the free end of the beam. The Euler- Bernoulli model is
utilized initially and later augmented with the Rayleigh beam theory to include rotary inertia.
To satisfy the stated objectives the research is divided into three major categories:
(1) Problem formulation, (2) Simulations and (3) Vibration under initial conditions.
Problem formulation: This stage involves the assessment of the mechanical structure
subjected to vibration. An axially loaded beam with tip mass is investigated to analyze a
typical engineering structure. This stage involves the modeling of the piezoelectric
composite and formulating the equations of motion. It also involves formulating the stress
strain relationships which are used for developing these equations. The constitutive relations
for the piezo actuator and the equations of motion are combined to develop a transverse
displacement function. The material properties (Young’s modulus, density, etc.) of PZT and
the column are of the same order of magnitude as the elastic column, and therefore the
investigation accounts for the material properties of the host and the piezoelectric materials.
The presence or absence of the piezo layer at the top or bottom of the composite will be
shown to have an effect on the symmetry and position of the neutral axis of the beam. The
model should show that an electric field applied to the top or bottom piezo actuator will also
have an effect on the frequencies of vibration. The piezoelectric beam model is developed
such that the input voltage can be varied in an individual layer without affecting the input
voltage in the other layer. The piezo actuators are powered by two voltage sources and
allows for the ability to switch the polarity of the source. In this study, the model developed
would be robust enough to analyze both symmetric and non-symmetric lamina.
Simulations: At this stage we develop a displacement feedback control system to compare
the oscillations of a beam without an electric field to a beam with an induced electric field.
In the investigation below, the study will show that by using piezo-electric actuators, it is
possible to increase or decrease the natural frequencies of vibration. The solution is
presented in the form of an eigenfunction series expansion.
Vibration under initial conditions: The infinite series of eigenfunctions is reduced to a
finite set and the level of accuracy required to satisfy the initial conditions is established. The
initial conditions involve an initial displacement and velocity for the tip of the piezoelectric

32
beam. The contribution of the various eigenfunctions to the total solution is also
demonstrated. The frequencies of oscillation for uncontrolled and controlled beams will be
compared to quantify the level of efficacy in the reduction of the vibrations.

33
Chapter 2 – Piezoelectric composite beam
2.1 Derivation of the governing equations for the beam and the
piezo layers
2.1.1 Moment-curvature relation for beam
Piezo materials have a special property that allows the conversion of electric voltage into a
mechanical strain, and vice-versa. These materials can be incorporated into mechanical
structures to form composite structures. A voltage input induces a strain which can be used
to change the dynamic characteristic behaviour of the structure. The effect of piezo-electricity
on the natural frequencies of a cantilevered beam made from an elastic column and piezo
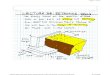
actuators can be modeled as a lamina or composite beam. In Figure 2.1 below, a uniform
beam is vibrating freely under constant axial load N(x). The left-end of the beam is clamped
to a support, while the right-hand side is allowed to move freely in the y-dir. Let w(x,t) be the
transverse displacement of the beam anywhere along the x-dir. at any time.
Figure 2.1: Uniform beam under free vibration
The Euler-Bernoulli theory can be applied to the deformation of the beam, where the fiber
along the neutral axis of the beam experiences zero strain. The fibers above the neutral axis
experience a contraction, whilst the fibers at the bottom of the neutral axis experience an
extension. According to this theory: (1) the neutral axis remains un-deformed, (2) plane
sections normal to the neutral axis remain normal and plane to the neutral axis when a load is
y
N(x
M(0,t)
N(x)
L
M(L,t)

34
applied, and (3) the transverse normal’s experience zero strain along the normal direction.
When the beam is deflected, a fiber can be isolated to form a basis for the discussion as
shown in the Figure 2.2 below.
Figure 2.2: Single deformed fiber(s) along the length of the beam
We can deduce from Figure 2.2 that the following relation holds.
ρθ 1=
dsd ………….……………………………….……………………. (2.1)
furthermore,
( ) )/( ρθε ydsdyyx −=⋅−= ……………....……...…….………………... (2.2)
and,
( ) ( )ρεσ /cxcx EyEy ⋅−=⋅= ………………….………..……………… (2.3)
The resultant bending moment due to σx must equal the integral of the bending moment
across the surface area and thus:
dx
dθ
ds
θ
θ+dθ
dw w+ dw
ρ s (single fibre from the beam)
x
w

35
[ ]∫ ⋅−=
Axc dAyM σ ..…..…………… .(2.4a)
and,
( ) ∫⋅−=
Acc dAyEM 2/ ρ ..…..…… ……….(2.4b)
also,
∫=A
c dAyI 2 ..…..………… ….(2.4c)
therefore,
ρ1⋅−= ccc IEM and,
dsdθ
ρ=
1 …………… ..…..…………….(2.4d)
It can be shown that the following relation holds:
23
2
2
2
1
+
=
dxdw
dxwd
dsdθ …………….……………..….……………………. (2.5)
when 12
<<
dxdw the slope and the deflection are small it leads to the following moment
curvature relation:
( )cc
c
IExM
dxwd
−=2
2
……………………..……..………...………………… (2.6)
Mc(x) = Mb + M1 + M2 + Mp ………………..…….…………………. (2.7)
where, Mc(x) is the combined moment contribution from the elastic beam, the piezo material
and the applied electric potential on the piezo. When the beam moves from its natural
position; internal forces, shear forces and moments acting on each infinitesimal element of
the beam are induced, as shown in Figure 2.3. The element has a length dx along the beam in
the x-direction.

36
2.1.2 Governing equations for composite beam
Figure 2.3: Internal shear forces, moments and external forces on the beam
Taking the sum of the forces and moments in both co-ordinates (x and y) we derive the
equilibrium conditions for the element in a form of these equations:
0),(),(2
2
=∂
∂−∂
∂t
txwx
txQ ρ ………….………………….…………..……. (2.8)
0),(),()(),(=+
∂∂
+∂
∂ txQx
txwxNx
txM ……………………………..……. (2.9)
The piezo-actuator layer is bonded to the top and bottom of the beam. The strain induced on
the piezo, through a voltage input signal, provides for active control of the vibrations. Looking
at the cross-section of the beam, we derive the relationship between stress and strain. The
stresses in the y and z direction can be regarded small, and therefore negligible. Figure 2.4
shows a cross-sectional area of the beam with the stress contribution from the different
materials.
2
2
dtwddxρ
N(x)+dN(x)
M(x) + dM(x)
Q(x) + dQ(x)
M(x)
w(x,t) Q(x)
dx
y
N(x
x

37
2.1.3 Constitutive equations for piezo layers
The beam can be treated as a lamina with the piezo-electric material inducing a strain on the
top and bottom surface of the beam. The equation of state for the induced stress-strain for a
piezo material (of the D-form) can be written as (Smith, 2005),
Figure 2.4: Cross-sectional area of beam
iipqEpqp EdσSε += ……...……….….…………….…………………… (2.10)
and,
kikqiqi EdD σεσ += ….……………………...…..……………………… (2.11)
where, p,q = 1……6 and i,k = 1,2,3 and EpqS , ipd and σε ik represent the elastic compliance,
piezoelectric strain/charge coefficient and the electric permittivity, respectively. Di and Ek
represent the electric displacement and the electric field, respectively. For an unconstrained
piezo actuator the strain can be written as:
y
z
b
dy dz
dz
dy
hb
Piezo layer
Beam
Mid-plane
of beam
h2
h1
ΔA2
ΔAb
ΔA1 dy
dz
Piezo layer b

38
p
ppxx h
VdEd 31331 ==ε …………….………….………………………… (2.12)
where, d31 is the transformed piezoelectricity constant, hp is the piezo thickness and Vp is the
applied voltage. The stress strain relationship in each layer of the lamina can be expressed as
follows:
xxbxx E εσ = Beam layer……………….....………… (2.13a)
)(1 pxxxx E εεσ −= Bottom piezo layer……...……...…….. (2.13b)
)(2 pxxxx E εεσ −= Top piezo layer……….………….….... (2.13c)
εxx is the strain in the x-direction only; Eb , E1 and E2 are the Young’s Modulus for the beam
and the piezo layers respectively and ɛp the strain due to the applied voltage. For a beam
whose cross-section dimensions are small relative to the span, the stresses and the strains are
very small in the y and z directions and therefore negligible, ɛyy = ɛzz = 0. However, this
assumption would be unjustified if there was a uniformly distributed load acting at the top of
the beam. The lateral and transverse displacements are used to define the strain in the beam.
dxxdwyxuux)()(0 += …………..…………..……………………….…. (2.14)
and,
)(xwu y = …….…………………………..……………………….….... (2.15)
also,
2
20 )()(
dxxdwy
dxxdu
xx +=ε ………..………..……..……………………... (2.16)
therefore,
])('')('[ 202 εσ −+= xywxuExx 222hhyh bb +≤≤+ ………… (2.17a)
)]('')('[ 0 xywxuEbxx +=σ 22bb hyh
+≤≤− ……….….. (2.17b)
])('')('[ 101 εσ −+= xywxuExx 122hhyh bb −−≤≤− ……..... (2.17c)

39
where, )('0 xu is the initial value of the strain and (′) indicates the derivative with respect to
x, ∂/∂x The initial strain in the column is caused by the axial force. The piezo is perfectly
bonded to the beam such that the longitudinal strain in the lamina varies linearly from the
center of the beam to the top and bottom surfaces. The stress at the interface between the
different materials exhibit discontinuities and the stress vary linearly through the thickness of
each particular layer based on the stiffness properties of each layer. By integrating the stress
throughout the cross-sectional area, Ab, A1 and A2 in Figure 2.4, the resultant in-plane normal
force (FL) in the x-dir can be calculated using equation 2.18 and 2.20 below:
∫=A
xxL dAF σ ………………… ……………..………………….……. (2.18)
The beam can be modeled as a composite made out of three different materials; two piezo
actuators and an elastic beam, see Figure 2.4. The stress resultant is sum of the stresses in
each layer of the composite. The maximum stress occurs at the outer most surface in each
layer and the stresses tend to zero as we approach the neutral axis of the composite. The fiber
along the neutral axis experiences zero strain in the case of zero axial force. For a symmetric
composite the neutral axis is half-way along the height of the beam.
Figure 2.5: Cross-sectional area of beam indicating the dimensions of the composite
h1
h2
hb y=0 b
1
2 y2= yn
y3 = yn + h2
y1 = - (hb – yn)
y0= - (hb – yn + h1)
yn
Neutral Axis
b

40
If the top layer and bottom layer of the piezo actuators are of different thickness, material and
dissimilar induced voltage, the composite becomes anti-symmetric and it is necessary to
locate position of the neutral axis (yn) from the interface between the top piezo layer and the
elastic column as indicated in Figure 2.5. To determine the neutral axis the longitudinal
forces in the composite must be equal to zero therefore from equations 2.17 and 2.18 and
Figure 2.5:
∫∫∫ ++=21 A
xxA
xxA
xxL dAdAdAFb
σσσ ………………………..……….……. (2.19)
∫∫∫ −++++−+=3
2
2
1
1
0
])('[)(])('[)(])('[)( 2020101
y
y
y
yb
y
yL dyyxuExbdyyxuExbdyyxuExbF εκκεκ ..(2.20a)
where,
2
2
dxwd
=κ , dxduxu 0
0 )(' = and dyxbdA )(= (2.20a)
This investigation focuses on a beam with an applied constant axial force along the beam
were the lateral deflections are small and linear elastic behavior is assumed, the longitudinal
forces are either zero or constant in the case of bending, axial compression and extension in
free vibration (Gere et al., 2009). It follows that the initial longitudinal deflection does not
change along the beam and the second derivative of the longitudinal force along the beam can
be ignored. Therefore equation 2.18 simplifies to the following:
0)(1
=∑∫∫=
=
nk
kkxxdAσ ………..……………..…………...…….…….….…. (2.21)
where,
( ) ( ) κσ kkkxx yE= ……..……..……………….……………………..… (2.22)
and,
dyxbdAk )(= …………..………………………...……………………. (2.23)
therefore,

41
0)(1 1
=∑ ∫=
=−
nk
k
y
yk
k
k
ydyxbE κ ………...…………...…………..……...……….. (2.24)
For a constant width (b(x) = constant) and curvature for all three materials:
( ) 01
21
2 =−∑=
=−
nk
kkkk yyE ………………………..…..………..………..…… (2.25)
Using Figure 2.5 the above summation can be used to solve and determine yn, which is the
distance from the interface of the top piezo and the elastic column to the neutral axis.
0)()()( 22
232
21
22
20
211 =−+−+− yyEyyEyyE b …………...…………..… (2.26)
Substituting the values for y0…3 into equation 2.26 the position of the neutral axis can be
determined from the following relationship:
( )2211
1122
222
11
22hEhEhE
hhEhEhEhEybb
bbbn ++
++−= ……………..……..….………….. (2.27a)
For a symmetric beam, with h1 = h2 = h and E1 = E2, equation 2.27a reduces to yn = -hb/2,
which is the mid-plane of the composite beam. As E1 → 0, the bottom piezo layer can be
neglected and the neutral axis is located at:
( )bb
bbn hEhE
hEhEy++−
=22
2222
2 (2.27b)
Further, by letting Eb → 0, the elastic column can be neglected and only the top piezo layer is
taken into account making yn = -h2/2, which corresponds to the results obtained by Smith,
(2005). In equation 2.27a, when E2 → 0 the top piezo layer is neglected and the neutral axis
is expressed as:
( )bb
bbbn hEhE
hhEhEhEy
+
+++=
11
112
112
22
(2.27c)

42
Further setting Eb → 0 in the above equation the result is yn = +(h1/2 + hb), which corresponds
to the results obtained by (Gere et al., 2008). It is therefore correct to deduce that when the
Young’s modulus for the beam tends to zero the neutral axis of the composite is at the
midpoint of the distance between the two piezo layers, when the Young’s modulus of the
piezo actuators remain large and equal (E1 = E2 >> 0).
The bending moment (MZ) in the z-direction includes contributions from the beam and the
piezo layers combined and therefore the bending moment can be calculated by summing the
contributions across the cross-sectional area, i.e.
∫=A
xxZ ydyxbM σ)( ………….………….……………………………. (2.28)
The internal strain in the different layers in the composite and the position of the neutral plain
will assist in the definition of the bending characteristics of the beam, when the beam is in a
state of equilibrium. From the stress in the different layers, the moments and the longitudinal
forces across the cross-section of the composite can be calculated by integrating the stresses
over the areas covered by the beam and the piezo actuators. Equation 2.28 defines the
moments experienced by the composite, where b(x) is the width of the composite along the x-
direction, σxx is the stress across the cross-section and y is the position from the neutral axis
along the transverse direction. After inserting equation 2.26 into equation 2.28, the moment
across the composite can be expanded and represented in equation 2.29 as the sum across the
three different cross sections.
( ) ( ) ( )( )∫ ∫ ∫ ∫+
+−
−
+− −
+
−+−+−=−2
1 1
2
)(
0
0
22
221
2)(h
hh
h
hh h
h
nnbnnc
b
b
b b
dyyyEdyyyEdyyyEdyyyE …. (2.29)
The left side of equation 2.29 is the combined moment of the composites beam, while the
right hand side represents the contributions from the different layers, i.e. the beam and the top
and bottom piezo actuator. The neutral axis (yn) is defined in equation 2.27 and together with
equation 2.30 the combined Young’s modulus (Ec) for the composite beam can be resolved.

43
( ) ( )( )
( ) ( )2
1
2
1 0
32
033
1)(
3
31
31
31
31 h
nh
nb
h
hhn
h
hhnc yyEyyEyyEyyE
b
b
bb
+
−
−
+−
+
+−
−+
−+
−=
− ... (2.30)
After inserting the integration limits and solving equation 2.30 for Ec the results are the
following:
( ) ( )[ ] ( )[ ] ( )[ ]( ) ( )31
32
3322
3331
31
nbn
nnnnbbnbnbc yhhyh
yyhEyyhEyhhyhEE−−−−−
+−+−++++++−= ….. (2.31)
Ec is the combined stiffness of the elastic column and the piezo layers. The longitudinal force
in the composite relationship states that:
( )( )∫+
+−
−=2
1
)(h
hhncL
b
dyyyExbF κ …………...….………………………….. (2.32)
Were FL is the longitudinal force and κ is the curvature. Thus the moment-curvature relation
for the composite beam can be expressed as:
( )( ) dyyy
xwxbEM n
h
hhcc
b
22
1
2
2
)( −∂∂
−= ∫+
+−
……………………..……………. (2.33a)
2
2
)(xwxIE cc ∂
∂−= …………..………….….........………….……… (2.33b)
Therefore the combined moment of inertia for the composite beam can be expressed in
equation 2.34 where dA is an infinitesimal area of the composite shown in Figure 2.4.
∫=A
c dAyI 2
………………………..…………..……………………….. (2.34)
Using equations 2.28, 2.33 and 2.34, we derive the combined moment of inertia of the
composite beam, which includes all the material properties associated with each layer that

44
would have an effect on the bending of the composite, i.e. the dimensions and stiffness of the
different layers in the structure.
( ) ( )[ ]31
323
)()( nbnc yhhyhxbxI −−−−−= ……………………..…………………... (2.35)
In the limit as E2 → 0 and E1 → 0, h2 → 0 and h1 → 0, the bottom and top piezo actuators
have no effect because the stiffness and the geometric proportions become non-existent
(zero).
( ) ( )[ ]33
3)()( nbnc yhyxbxI ++−= ………………………………………. (2.36)
This leads to a reduction of equation 2.36 to equation 2.37 which is the moment of inertia for
a symmetrical cross-section beam. This is the moment of inertia for rectangular cross-section
beam.
12)()(
3b
chxbxI = ……….…………………………..…………………… (2.37)
The moment contribution by the piezo layer can be expressed in equation 2.38 below, where
Mp is the moment due to the applied electric potential. Ec is the effective Young’s modulus
due to the elastic beam and top and bottom piezo material.
),()('),( 20 txMdyyEydyExutxM
B BA Apccz ∫ ∫ −+= κ ………………..… (2.38a)
c/ρκ 1= , and M p (x,t) = MP1(x,t) + MP2(x,t) (2.38a)
where ρc is the radius of curvature for the composite, MP1 and MP2 are voltage induced
moments in the piezo layers.
From Figure 2.5, the neutral axis is calculated to be at a distance (yn) from the interface
between the top piezo actuator and the elastic beam. The moment induced by both actuators

45
is calculated using the interface between the top layer and the beam as the pivot. And thus
the moment due to bottom piezo becomes:
( ) ∫−=pA
P ydyEtxM 111 , ε ……..……………………….………….…...… (2.39a)
( )( )dyyyxbh
VdE n
ph
hh
b
b
−−−= ∫−
+−)(
1
)(
)( 3111
( )( ))(
)(
2
1
1
3111
21)(
b
b
h
hhn
P
yyxbh
VdE−
+−
−−−=
( )nbP yhhxbVdE 22)(
21
11
311 −+−=
( ) ( )( )
++
++++−=
2211
121221
131
2)(21
hEhEhEhhhEhhhhEExbVd
bb
bbbbP .…… (2.39b)
where, ),(11 tLwgV d
P = and gd1 is the control voltage gain used to control the strain in the
piezo actuator. As 0→2h , the top piezo layer will have no structural effect on the lamina
and therefore it will not exert a moment on the beam and its control effectiveness is
insignificant. When the reference point for the neutral axis is at the top surface of the beam
and 0=2h , equation 2.39b reduces to the results obtained by Bailey et al., (1985) and
Kalamkarov et al., (1996).
Let, ( ) ( )( ) 1
2211
121221311
221
dbb
bbbba g
hEhEhEhhhEhhhhEE)x(bdC
++
++++=
……….…. (2.40)
where 1aC is the piezo constant on the bottom. From equations 2.39b and 2.40 it follows that:
( ) )t,L(wCt,xM aP 11 = …………..…………………..…..…………..…. (2.41)
Moving the reference point or pivot from the interface between the top piezo and the elastic
column and locating it at the center of the beam, Ca1 then becomes,

46
( ) ( )( ) 1
2211
121221311
2)(
21
dbb
bbbba g
hEhEhEhhhEhhhhE
ExbdC
++
+−++−=
……….. (2.42)
The moment due to the top piezo is:
( ) ∫−=pA
P ydyEtxM 222 , ε ….………………..………………………… (2.43a)
( )dyyyxbh
VdE n
Ph−−= ∫
+)(
2
2
0 3122
( )2
0
2
2
2
312 21)(
h
n
P
yyxbh
VdE+
−−=
−−= n
P
yhhxbh
VdE 2(2
)( 22
2
2
312
( )nP yhxbVdE 2)(
21
22
312 −=
( )( )
++
+−+−=
2211
2222111
222
312
)(21
hEhEhEhEhEhhhE
hExbVdbb
bbbP …. (2.43b)
where, ),(22 tLwgV d
P = and gd2 is the control voltage gain.
Let, ( )( ) 2
2211
2222111
223122
)(21
dbb
bbba g
hEhEhEhEhEhhhE
hExbdC
++
+−+−=
……..….. (2.44)
where 2aC is the piezo constant on the top. From equations 2.43b and 2.44 it follows that:
( ) ),(, 22 tLwCtxM aP = ……...……………....………….......…..………. (2.45)
As 0→1h , the bottom piezo layer has no structural effect on the lamina and therefore it will
not exert a moment on the beam and its control effectiveness is insignificant. If we take the

47
reference point for the neutral axis to be at the top surface of the beam, between the top piezo
layer and the elastic column, equation 2.44 reduces to the results obtained by Smith (2005).
Again, if the reference point or pivot is shifted from the interface between the top piezo and
the beam and located at the center of the beam, Ca2 then becomes:
( ) ( )( ) 2
2211
221112312
2)(21
dbb
bbbba g
hEhEhEhhhEhhhhEExbdC
++
++++=
….….…....… (2.46)
From comparing equations 2.42 and 2.46 it is noted that when the material properties and
geometric proportions are identical for the bottom and top piezo the moments are equal in
magnitude for a similar voltage input. Then the combined piezo moment effect due to the
input voltage on the top and bottom layers and the tip displacement can be written as:
( ) ),(, 0 tLwCtxM Ap = …………..………………….…...………………. (2.47)
where,
),(),(),( 210 tLCtLCtxC aaA += ………………………......…………….. (2.48)
And the combined moment for the whole beam can be written as:
),(),()(),( 2
2
txMx
txwxIEtxM pccc −∂
∂= ………………....……..…….… (2.49)
Inserting equation 2.49 into equation 2.9, the shearing force Q(x,t) can be expressed in terms
of the displacement variables, w(x,t).
∂
∂+
∂∂
+
∂
∂∂∂
−=x
txMx
txwxNx
txwxIEx
txQ pcc
),(),()(),()(),( 2
2
…..... (2.50)
From equations 2.8 and 2.50 the equation of motion can be expressed in terms of the
displacement variables as,

48
),()(),()()( 2
2
2
2
2
2
2
2
txftwxA
xtxM
xwxN
xxwxIE
xP
cc =∂∂
+∂
∂+
∂∂
∂∂
+
∂∂
∂∂ ρ . (2.51)
Where f(x,t) is the external transverse load per unit length. This load includes conservative
and non-conservative loads, such as gravity and viscous damping. Equation 2.51 represents
the partial differential equation describing the motion of the beam at any point along the
beam at any time, and equations 2.49 and 2.50 represent the moment and shear distribution
along the beam, respectively.
2.2 Solution of the governing equations by separation of variables
In this study the width of the piezo layers are kept constant along the length of the beam to
facilitate a uniformly distributed parameter approach, where the applied voltage is kept
constant along the length of beam. A piezo layer is attached to the bottom and top of an
elastic beam and therefore the piezo term, Mp(x,t), appears in the differential equation of
motion (equation 2.51). This piezo term is a constant along the beam and therefore the
second derivative for the piezo term is zero and does not appear in equation 2.52 below. In
free vibration the external transverse load is set to zero, f(x,t) = 0, in equation 2.51 and the
axial force, N(x), is kept the constant along the length of the beam. The beam cross-section is
kept constant and therefore the height of both piezo layers and elastic beam remain constant
along the composite. This problem can be solved by obtaining the eigenvalues and taking the
sum of the eigenfunctions. After the above modifications, the equation of motion 2.51
reduces to equation 2.52.
0=∂∂
+∂∂
+∂∂
2
2
2
2
4
4
tw
Aρxw
Nxw
IE cc ……….…..… ………………….. (2.52)
For this partial differential equation a separable solution of the form below is assumed.
∑∞
=
=1
)()(),(n
nn tTxXtxw ……..…..…….………..…….................…….. (2.53)
Where X is a function of x only, T is function of t only and n is the nth mode of vibration.

49
Inserting equation 2.53 into equation 2.52; and taking the cross-section of the beam and the
axial load to be constant along the length of the beam; we arrive at the following equation in
the spatial domain and in the time domain.
0=++ )t(T)x(AX)t(T)x(NX)t(T)x(XIE..
nnn
''
nn
''''
ncc ρ …………..………. (2.54)
This equation becomes equation 2.55 after rearrangement, such the left hand side only
contains the terms in the spatial variable, X(x); and the right hand side contains the terms in
the time domain, T(t).
)t(T)t(Tm
)x(X)x(NX)x(XIE
n
..
nc
n
''
n
''''
ncc −=+ ………..……..…….………….... (2.55)
where, mc = ρA (mass/unit length for the composite column) and ρA = ρ1A1 + ρbAb + ρ2A2.
For the above relation to be true, it follows that the right-hand-side and the left-hand-side of
equation 2.55 must be equal to a constant. A constant λn, is chosen such that both the RHS
and the LHS of equation 2.55 are equal to the constant (λn) and two differential equations can
be derived and these are shown in equations 2.56 and 2.57. By definition, 2nn Aωρλ = .
0)()()( '''''' =−+ xXIE
xXIE
NxX ncc
nn
ccn
λ ………………..………….…… (2.56)
0)()(..
=+ tTtTm nnnc λ ………..……..……………………………...…... (2.57)
where (') and (.) are the derivatives with respect to space and time respectively, ωn is the
natural frequency for the nth mode of vibration. Equations 2.58a and 2.58b below
demonstrate the relation between the natural frequency and the other parameters of the
system.
cc IEN
=2β ; cc
ncn IE
ma
24 ω= …………….………..…… (2.58a)
2n
c
n
mω
λ= ; crPkN ⋅= …………..……….…......… (2.58b)

50
where, β2 is the axial load parameter, 4na is the frequency parameter, N is the axial load, Pcr
is the critical buckling of a beam under compressive axial loading and k is a proportionality
constant (k = -10.0……+0.8). A negative proportionality constant indicates a tensile load
and a positive constant indicates a compressive load.
2
2
4LIEP cc
crπ
= …………..….…………..…………..…………….…. (2.59)
After separation of variables, the solution can be expressed in the space and time domain,
independently. The equations are:
0)()()( 4''2'''' =−+ xXaxXxX nnnn β ……..……..……………………… (2.60)
and,
0)()( 2..
=+ tTtT nnn ω ………………………………………………….… (2.61)
The general solution to equation 2.60 and 2.61 are:
xpDxpCxpBxpAxX nnnnnnnnn 1122 cosh+sinh+cos+sin=)( ……… (2.62)
and,
tFtEtT nnnnn ωω cossin)( += ……..……………….…..………………. (2.63)
where,
( )2
4 4222
1n
na
p++−
=ββ
and
( )2
4 4222
2n
na
p+−+
=ββ
where An, Bn, Cn, and Dn, are constants to be determined from the boundary conditions; and En
and Fn from the initial conditions. The characteristic equation can be used to determine the
natural frequencies from the stipulated boundary conditions, which are clamped-free in this
case.

51
2.3 Boundary conditions
Discreet elements can be attached to the ends of the beam and they will have an effect on the
vibration profile of the beam. For the clamped end of the beam the displacement and slope
are zero, thus:
0),0( =tw and 0),0(=
∂xtw ……………..……………………………. (2.64)
At the free end, the moment and shear force are non-zero because of the piezo and
concentrated mass and thus an additional moment and a force term are added, implying:
( ) 0,),(2
2
=−∂
∂ tLMx
tLwIE pcc ……….…..…..………………..……..…. (2.65)
and,
0),(),(),(3
3
2
2
=∂
∂−
∂∂
−∂
∂x
tLwNx
tLwIEt
tLwm ccT ………………….…… (2.66)
where, the shear boundary condition is time dependent. In order to separate the time and
space dependency from the boundary conditions we assume a separable solution of this form:
)()(),(1
tTLXtLw nnn∑∞
=
= ……...…………..………..…..……….……... (2.67)
where w(L,t) is the tip displacement, ωn is the natural frequency of vibration and Xn(L) is the
spatial solution of the vibration of the beam evaluated at x = L. Substituting equation 2.67
into equation 2.65 the following moment at the tip of the beam is derived:
( ) ( ) ( ) ( ) 002
2
=−∂
∂tTLXC
xtTLX
IE nnAnn
cc ………….………....….……... (2.68)
From equation 2.42, 2.44 and 2.47, it follows that:

52
( ) ( ) ( ) 0212
2
=+−∂
∂LXCC
xLX
IE naan
cc ………..…….……..…………... (2.69)
and the combined moment experienced by the beam is:
( ) ( ) 02
2
=−∂
∂ LXCx
LXnA
n ……….…..…….………..………..………….. (2.70)
where,
( )
( ) 222
2222
22
2231
111
1131
22)(
2)()(
dbb
bbbb
cc
dbb
bbb
ccA
ghEhE
hEEhEhEhEIExbd
ghEhEhhhEE
IExbdC
+
−+−
+
+−=
…………………………. (2.71)
Thus, equation 2.69 can be written in short form as follows:
( ) ( ) 0'' =− LXCLX nAn …….....…………………..….…………..……... (2.72)
Substituting equation 2.67 into equation 2.66, such that ωn is the natural frequency of the tip
of the beam, the natural frequency of motion of the tip mass should be the same as that of the
beam. Figure 2.6 shows the concentrated mass at the tip of the beam (the mass is
dimensionless). Therefore the shear boundary condition simplifies to the expression in the
equation below.
( ) ( ) ( )0
)()()()()()(3
3
2
2
=−−dx
tTLXdN
dxtTLXd
IEdt
tTLXdm nnnn
ccnn
T ..... (2.73)
0)()(
)()(
)()( 3
3..=−− tT
dxLdX
NtTdx
LXdIEtTLXm n
nn
nccnnT ………....… (2.74)

53
Figure 2.6: Beam with concentrated mass at the free end
using equation 2.61 above.
( ) 0)()(
)()(
)()( 3
32 =−−− tT
dxLdX
NtTdx
LXdIEtTLXm n
nn
nccnnT ω …...… (2.75)
and dividing equation 2.75 by Tn(t), it is reduced to equation 2.76 below, where the boundary
condition appears in terms of the spatial variable alone.
( ) 0)()(
)( 3
32 =−−−
dxLdX
Ndx
LXdIELXm nn
ccnnT ω …………....……….. (2.76)
Rearranging equation 2.76, and writing it in reduced notation results in the boundary
condition in equation 2.77, after dividing and multiplying the first term by cm and dividing
all the terms by cc IE .
02
'''' =⋅++ ncc
c
c
Tn
ccn X
IEm
mmX
IENX ω
at x = L……….……..…...…..(2.77)
And finally, in the space frame, the shear boundary condition at the free end due to the mass
is expressed in equation 2.78.
04'2''' =++ nnnn XaXX ηβ at x = L ..…………..…....….. (2.78)
y
x
w(L)T(t)
Q(L)T(t)
-mTω2w(L)T(t)
N

54
where, 2β is the axial load parameter, 4na is the frequency parameter and cT mmη = is the
ratio of the concentrated tip mass to the mass of the composite beam. From equation 2.65,
Mp is the uniformly distributed moment generated by the piezo layer on the beam due to the
input voltage. The piezo layer is bonded to the top and bottom surface of the beam as
indicated in Figure 2.7. Although the piezo is mounted along the length of the beam
(at 0 < x < L), the moment manifests itself only at the boundary.
2.4 Determination of the natural frequencies of the beam
To find the natural frequencies of the beam, it is necessary to satisfy the boundary conditions
at the clamped end and at the free end of the beam. The natural frequencies are used to
determine the mode shapes. These boundary conditions imply the following on the boundary
after using equation 2.67 in the space frame.
Figure 2.7: Cantilever sandwiched between two piezo electric actuators
At x = 0:
0)0( =nX and 0)0(=
dxdX n ……..….………..….…………………… (2.79)
At x = L:
0)()(2
2
=− LXCxd
LXdnA
n …………...…………………………………. (2.80)
0)()()( 423
3
=++ LXadx
LdXdx
LXdnn
nn ηβ ……..….....…..……..……..… (2.81)
hb
h2 N
x
dx
x-dir
N
Piezo Actuator
Elastic Column
Piezo Actuator
h1

55
The general solution from the previous section, mentioned below in equation 2.82a will be
used in the four boundary conditions above.
xpDxpCxpBxpAxX nnnnnnnnn 1122 coshsinhcossin)( +++= ……... (2.82a)
After inserting the general equation into the boundary conditions in equations 2.79 at x = 0,
and dropping the subscript (n) two variables can be eliminated and represent the general
solution in terms of two variables C and B. The constants A, B, C and D are unique for each
and every mode of vibration because each and every mode corresponds to a unique natural
frequency depending on the loading conditions.
BD −= ; and CppA
2
1−= (2.83b)
Hence our general solution equation 2.82a becomes,
( )xpxpBxpppxpCxX 122
2
11 coshcossinsinh)( −+
−= ..……….…. (2.84)
The general solution can be substituted into the two boundary conditions on the free-end of
the beam at x = L, to arrive at two equations with the two unknown constants C and B. These
two equations are used to determine the characteristic equation in order to find the natural
frequencies. One of the variables is undetermined and can be set to unity. The boundary
conditions, equations 2.80 and 2.81 are converted into equation 2.84 and 2.85 after inserting
the general solution and some simplification.
( ) ( )
( ) ( )[ ] 0coshcos
sinhsin
1212
22
1212
22
2
1
=−++−
−++
LpCpLpCpB
LpCpLpCpppC
AA
AA ……..……...…...…. (2.85)
and,

56
0)coshsinhsinh(
)cossinsinh(
)sinhcoshcosh(
)sincoscos(
14
112
131
24
222
132
14
112
131
24
222
232
2
1
=
++−
+−+
+++
−−
LpaLppLppLpaLppLpp
B
LpaLppLpp
LpaLppLpppp
C
ηβ
ηβ
ηβ
ηβ
………..….. (2.86)
For the characteristic equation solve for C in equation 2.84 and substitute the results into
equation 2.85, and B remains undetermined or an arbitrary constant. The constant B can be
set to unity. After simplification the characteristic equation can be expressed in
equation 2.86. Equation 2.86 is used to determine the infinite set of natural frequencies
which are associated with the subscript (n) in equation 2.82a.
( )( )( )
0cos-
coscoshsinsinh2-
sincosh-cossinh
sinsinh-sinsinhcoscosh22
242
112
212
44211212
22
21
2
2122
212
4
2144
=+
++
++
++
LpC
LpLpCLpLpaaC
LpLppLpLppppa
LpLpaLpLpaCLpLpaa
A
AA
A
ββ
ββ
η
ββ
(2.87)
To verify the characteristic equation, set the piezo constant to zero and the result is
equation 2.87, which corresponds to the characteristic equation obtained by (Shaker, 1975) in
a study on vibration of a beam with axial load and a concentrated mass, which is given as:
( )( )( ) 0sincoshcossinh
sinsinhcoscosh22
21121222
21
221
2221
444
=−++
−++
LpLppLpLppppaLpLpaLpLpaa
η
ββ……….... (2.88)
Furthermore, if the axial force is set to zero, the result is the frequency equation for
cantilevered beam with a concentrated tip mass only, which is also obtained by
Edwards, Jr et al., (1989).
( )( )0coscosh22
sincoshcossinh
2144
21121222
21
2
=+
+−+
LpLpaaLpLppLpLppppaη ……...……. (2.89)

57
When the mass at the tip is zero we have the characteristic equation for an ordinary clamped-
free beam (Ertuk, 2012):
0=coscosh2+2 2144 LpLpaa ……………………………………….. (2.90)
For known values of β2, CA, L and η the characteristic equation 2.86 can be solved
numerically for the roots. There will be an infinite number of roots or natural frequencies
(ωn). The natural frequencies for the characteristic equation 2.86 will be determined from the
roots (Rn), which are determined from the relationship between the characteristic value (an)
and the length (L) of the beam.
To find the roots of the characteristic equation 2.86, let 444 LaR nn = , such that Rn becomes a
non-dimensional constant, then LRa nn /= . Inserting an into equation 2.60:
0)()()(4
''2'''' =
−+ xX
LRxXxX n
n
nnn β ……….………..………...…..… (2.91)
but, by using equation 2.58a; ( ) ( )ccncn IEma 24 ω= then:
cc
ncn
IEm
LR 24 ω
=
.……….………….…….…………...……………...… (2.92)
therefore,
c
ccnn m
IEL
R 2
=ω ……………..…….…………....………..……….. (2.93)
using the following relationship Rn can be determined numerically and thus the characteristic
value (an).
The material and geometric properties for the elastic beam and the piezo actuators are listed
in Table 2.1. The length of the column is chosen to be L = 0.146m to facilitate a comparison
with the table of findings by Young et al., (1949). The natural frequencies for a clamped-free

58
beam in their study corresponds with those in this study for all the first four modes of
vibration when the tip mass ratio, axial load ratio and piezo-electric voltage are set to zero.
Table 2.1: Material and geometric properties of the composite beam.
Aluminum Beam Bottom piezo material (Fiji C-82)
Top piezo material (Fiji C-82)
Young’s Modulus Eb = 76 х 109 N/m2 E1 = 59 х 109 N/m2 E2 = 59 х 109 N/m2
Density ρb = 2840 kg/m3 ρ1 = 1800 kg/m
3 ρ2 = 1800 kg/m3
Thickness hb = 10mm h1 = 1mm h2 = 1mm
Width b(x) = 0.0127m b(x) = 0.0127m b(x) = 0.0127m
Length L = 0.146m L = 0.146m L = 0.146m Piezo electric
constant -- d31 = 260 х 10-12 m/V d31 = 260 х 10-12 m/V
The characteristic equation 2.86 is dependent on AC , the combined top and bottom piezo
effect. The piezo effects are caused by the voltage applied and manifests at the boundary in
the form of moments. These effects are included in the moment boundary condition in
equation 2.70 which is used to determine the natural frequencies. It can be concluded that the
natural frequencies of the system depend on the voltage applied. When applying the voltage
to the piezo actuators the polarity or direction if the voltage input has a significant effect on
the natural frequencies. The polarity has the effect of increasing or decreasing the natural
frequencies depending on the mechanical response of the piezo materials. The two critical
parameters that determine the mechanical response of the actuator are poling direction of the
piezo material and the direction of the input voltage, see Figure 2.8.
Figure 2.8: Compression and Extension due to piezo material poling and input voltage
polarity for piezo
+ + +
- - -
(a) (b) (c) x
y

59
Figure 2.8(a) shows a piezo material poled in the y-direction and Figure 2.8(b) and 2.8(c)
shows the piezoelectric beam with a positive and negative applied voltage potential,
respectively. In Figure 2.8(b), the piezo material extends in length in the y-direction whilst
contracting in the x-direction and in Figure 2.8(c) the piezo material contracts in the
y-direction whilst it extends in the x-direction. A contraction in the x-direction represents a
compressive load and an extension in the x-direction represents a tensile load in the
longitudinal direction. The effects of compressive and tensile load on the natural frequency
are shown in Table 2.2. These results also shows the effects of the input voltage polarity
which has been observed by other researchers. According to literature, applying equal
opposite voltages to the piezoelectric layers poled in the transverse direction results in a
compressive or tensile mechanical stress on the beam (Abedinnasab et al., 2008). Table 2.2
indicates that, by controlling the polarity of the voltage input to the piezo layers, the natural
frequencies can be increased or reduced.
Table 2.2: Polarity of voltage input for piezo actuators.
Voltage Tension(T) Compression(C)
Frequency Voltage Tension(T) Compression(C)
Frequency
V10001 +=pV
V10002 +=pV
)V1000( =++V
T
C
1.8750 4.6941 7.8548 10.996
V01 =pV V10002 +=pV )V1000( 0 =+V
--
C
1.8352 4.6857 7.8518 10.994
V10001 −=pV
V10002 −=pV
)V1000( =−−V
C
T 1.875
4.6941 7.8548 10.996
V10001 −=pV V02 =pV
)V1000( 0 =−V
C
--
1.8352 4.6857 7.8518 10.994
V10001 +=pV
V10002 −=pV
)V1000( =+−V
T
T
1.9453 4.7107 7.8606 10.999
V01 =pV V10002 −=pV )V1000( 0 =−V
--
T
1.9115 4.7025 7.8577 10.997
V10001 −=pV
V10002 +=pV
)V1000( =−+V
C
C 1.7925 4.6772 7.8489 10.993
V10001 +=pV V02 =pV
)V1000( 0 =+V
T
--
1.9115 4.7025 7.8577 10.997
A positive input voltage causes the bottom piezo ( 1p ) to exert a tensile load on the composite
and a negative voltage exerts a compressive load on the column. A negative voltage exerts a
tensile load on the top piezo actuator ( 2p ) and the opposite voltage exerts a compression. If
the bottom and top piezo actuators exert loads in opposite direction and the natural
frequencies remain unchanged because the net sum of the forces is zero.

60
However, if both piezo actuators exert a tensile load the whole column experiences a
symmetric tensile load which results in the increase in the natural frequencies of the system.
This is indicated in the tables for a positive voltage for bottom piezo ( 1p ) and negative
voltage for top piezo ( 2p ) V1000=+−V . The superscript and subscript indicates the polarity
of the input voltage. An input voltage of V1000=−+V exerts a compressive load on the
column resulting in a reduction in the natural frequencies.
2.5 Orthogonality of the modes
If a sequence of real functions Xn(x) {for n = 1…∞} has a property that over an interval:
nnm
b
a
mnmn Ndx
dxxdX
dxxdX
xPxXxXxP δ=
⋅+⋅∫
)()()()()()( 21 ……….... (2.94)
where δnm is the Kronecker delta function (δnm = 1 for n = m and δnm = 0 for n ≠ m), then the
set of functions are said to form an orthogonal set (Balachandran, 2009). P1(x) and P2(x) are
the weighting functions on the interval where N is the norm of the function. If we assume
that 4na is a set of eigenvalues or characteristic values and Xn(x) is the set of eigenfunctions
associated with the set, this set provides the solution to the equation of motion of the beam in
equation 2.94a and 2.94b, such that m and n are arbitrary integers greater than zero.
0)()()( 4''2'''' =−+ xXaxXxX nnnn β ……….……………………...……. (2.94a)
0)()()( 4''2'''' =−+ xXaxXxX mmmm β …….……....….…….……………. (2.94b)
Multiplying equation 2.94a by Xm and equation 2.94b by Xn, where Xn and Xm are distinct
solutions to the equations of motion and integrating over the whole length of the column
( Lx ≤≤0 ) we arrive at the following relations,

61
00
4
0
''2
0
'''' =−+ ∫∫∫ dxXXadxXXdxXXL
nmn
L
nm
L
nm β ……..…..………….…. (2.95a)
00
4
0
''2
0
'''' =−+ ∫∫∫ dxXXadxXXdxXXL
mnm
L
mn
L
mn β ……………..…………. (2.95b)
Integrating the first two terms of equation 2.95a and 2.95b by parts we arrive at the following
equations:
[ ] [ ] [ ]Lnm
L
nmn
L
nm
L
nmL
nmL
nm XXdxXXadxXXdxXXXXXX 0'''
0
4
0
''2
0
''''0
'20
''' =−−++ ∫∫∫ ββ ….. (2.96a)
[ ] [ ] [ ]Lmn
L
mnm
L
mn
L
mnLomn
Lmn XXdxXXadxXXdxXXXXXX 0
'''
0
4
0
''2
0
'''''20
''' =−−++ ∫∫∫ ββ …. (2.96b)
Subtract equation 2.96b from equation 2.96a, and since the subscripts of the functions in the
third and fourth integration terms on the LHS can be interchanged, these terms cancel out and
vanish. Inserting the integration limits into equation 2.96a and 2.96b, the results are:
[ ]Lnmnm
mnmnmnmn
nmnmnmnm
XXXX
XXLXLXXXLXLXXXLXLXXXLXLX
0''''''
'2'2''''''
'2'2''''''
)0()0()()()0()0()()(
)0()0()()()0()0()()(
−=
−−+−
−+−
ββ
ββ
….. (2.97)
The term on the RHS of equation 2.97 will be treated by first considering the moment
boundary condition at the free end (x = L).
0)()('' =− LXCLX nAn …………………………….……..…..….……. (2.98a)
0)()('' =− LXCLX mAm ………....……………………...…..…………. (2.98b)

62
Multiplying equation 2.98a by Xm and equation 2.98b by Xn, where Xn and Xm are distinct
solutions to the equations of motion and integrating over the whole length of the
column ( )Lx ≤≤0 we arrive at the following relations:
0'' =− nmAnm XXCXX ………………..…….……...…………….……. (2.99a)
0'' =− mnAmn XXCXX ………….....…....…….………………………. (2.99b)
Subtracting equation 2.99b from equation 2.99a and integrating over the domain the results
are:
0000
''
0
'' =+−− ∫∫∫∫L
mnA
L
nmA
L
mn
L
nm XXCdxXXCdxXXdxXX ………...…. (2.100)
Integrate the first two terms of equation 2.100 by parts and factor CA from the last two terms:
[ ] [ ] 0000
''
0
''0
'0
' =
−−+−− ∫∫∫∫ dxXXdxXXCdxXXdxXXXXXX m
L
n
L
nmA
L
mn
L
nmL
mnL
nm .. (2.101)
In equation 2.101 the subscripts for the last four terms on the LHS are interchangeable and
therefore those terms vanish leaving us with the following:
[ ] 00'' =−
Lmnnm XXXX ………………..…………….…..…………….. (2.102)
From the LHS of equation 2.97 above, after inserting the integration limits, the terms
associated with the displacement and gradient at the fixed end vanish and the result is the
following:
[ ]Lnmnmmnnmmnnm XXXXLXLXLXLXLXLXLXLX 0'''''''2'2'''''' )()()()()()()()( −=−+− ββ (2.103)
But )()('' LXCLX nAn = therefore the RHS of equation 2.103 becomes:

63
[ ] 00'' =−
LmAnnAm XCXXCX ……….…………..…………….………. (2.104)
All the displacements and the slopes at the fixed end of the beam are zero and cause the
associated terms in equation 2.104 to vanish after inserting the appropriate integration limits
such that:
[ ] 0)()()()( '' =− LXLXLXLXC mnnmA …………...………...…………. (2.105)
Using the boundary conditions at the fixed end ( 0)0( =nX and 0)0(' =nX where x = 0) and
grouping the terms with Xm and Xn in equation 2.96a and 2.96b, respectively, we arrive at
equations 2.106a and 2.106b.
[ ] )()()()()( '''
0
4
0
''2
0
'''''2''' LXLXdxXXadxXXdxXXLXLXLX nm
L
nmn
L
nm
L
nmnnm =−−++ ∫∫∫ ββ ...
(2.106a)
[ ] )()()()()( '''
0
4
0
''2
0
'''''2''' LXLXdxXXadxXXdxXXLXLXLX mn
L
mnm
L
mn
L
mnmmn =−−++ ∫∫∫ ββ
(2.106b)
After inserting the boundary conditions at the fixed end the associated terms vanish and we
are left to satisfy the boundary conditions at the free end. Now using the boundary conditions
at the free end, x = L, i.e.
0)()()( 42''' =++ LXaLXLX nnnn ηβ and 0)()('' =− LXCLX nAn
using equations 2.106a, 2.106b and the above boundary conditions, after simplifying we
arrive at equations 2.107a and 2.107b.
[ ] )()()()( '''
0
4
0
''2
0
''''4 LXLXdxXXadxXXdxXXLXaLX nm
L
nmn
L
nm
L
nmnnm =−−+− ∫∫∫ βη … (2.107a)

64
[ ] )()()()( '''
0
4
0
''2
0
''''4 LXLXdxXXadxXXdxXXLXaLX mn
L
mnm
L
mn
L
mnmmn =−−+− ∫∫∫ βη … (2.107b)
Subtracting equation 2.107b from equation 2.107b we arrive at equation 2.108 and factor the
out the like terms on the LHS of this equation to arrive at equation 2.109.
( ) ( ) )()()()()()( ''''''
0
4444 LXLXLXLXdxXXaaLXLXaa mnnm
L
mnmnmnmn −=−+− ∫η .. (2.108)
( ) )()()()()()( ''''''
0
44 LXLXLXLXdxXXLXLXaa mnnm
L
mnmnmn −=
+− ∫η ……..... (2.109)
Inserting the moment boundary condition at the free end (x = L), the RHS of equation 2.109
leads to:
( ) )]()()()([)()( ''
0
44 LXLXLXLXCdxXXLXLXaa mnnmA
L
mnmnmn −=
+− ∫η …... (2.110)
where, equation 2.105 shows that the RHS of equation 2.110 is zero.
( ) 0)()(0
44 =
+− ∫
L
mnmnmn dxXXLXLXaa η ……..…..……………….. (2.111)
Since the natural frequencies are distinct, the eigenvalues will be distinct and
therefore 44mn aa ≠ , then the term inside the square brackets must be equal to zero for
equation 2.111 to be true. The eigenvalues associated with these eigenfunctions will lead to
an orthogonal relationship:
nnm
L
mnmn NLXLXdxXX δη =+∫0
)()( ……………..….…....….…..….. (2.112)
where nmδ is the Kronecker delta and Nn is the norm

65
∫ +=L
nnn LXdxxXN0
22 )()( η ……….…….….…………………...…….. (2.113)
and equation 2.114 can be written as:
[ ] nnm
L
mn NdxLXLXLx δηδ =−+∫0
)()()(1 ………..…………………... (2.114)
where, )( Lx −δ is the delta function, )(1)(1 LxxP −+= ηδ and 0)(2 =xP are the weighting
functions.

66
Chapter 3 - Computation of the natural frequencies
3.1 Natural frequencies for a cantilevered beam
The natural frequencies of a beam with a tip mass, axial load and a piezo actuator can be
determined from the characteristic equation obtained in equation 2.86 of Section 2.4. After
some simplification it can be written as equation 3.1 below:
( )( )
( )( ) 0sincoshcossinh
sinsinh2sinsinh
coscosh2)coscosh2(2
21121222
21
2
2144
22122
2144
2124
=−++
++−
+++−
LpLppLpLppppa
LpLpaaCLpLpa
LpLpaLpLpCa
A
A
η
ββ
ββ
..…… (3.1)
The roots of equation 3.1 are the eigenvalues of the solution and are used to determine the
natural frequencies of the beam. The natural frequencies are calculated for varying tip mass
and varying axial load for a piezo input voltages of 0V, 100V, 500V and 1000V. This study
pays attention to the first four natural frequencies of the system, i.e. 1st (fundamental), 2nd,
3rd and 4th natural frequencies. More frequencies can be added to improve the accuracy of
the solution. It is demonstrated later in Chapter 7 that four eigenfunctions are adequate to
approximate the exact solution with a small residual. The results are plotted in the
Figures 3.1a to 3.4d below. The voltage input into the piezo material produce a strain
resulting in moments at the boundaries and changes the natural frequencies.
When the piezo layers are deactivated, the results of this study can be compared to the results
obtained by other researchers. If the axial load is removed and there remains only the tip
mass, the natural frequencies are listed in Table3.1a for zero axial load ratio (k = 0) are
obtained. These are the same natural frequencies obtained by Balachandran et al., (2009).
When the tip mass is removed and the axial load is retained, the natural frequencies generated
are the same as those generated by Shaker, (1975).
In this investigation, an analysis is conducted into the influence of the axial load, tip mass and
the piezo voltage input, with the main emphasis being on the piezo. The tip mass is
considered infinitesimal. Later we consider an extended mass with a center of gravity that

67
does not necessarily coincide with the tip of the beam. In that case, the rotary inertia of the
tip mass is taken into account. This case will be presented later in Chapter 4.
3.2 Natural frequencies for a beam with tip mass and axial load
3.2.1 First natural frequencies (ω1)
Table3.1a to Table 3.1d below indicate the change in natural frequency with respect to axial
load and tip mass ratio. Figures 3.1a to 3.4d are the graphs generated from Table3.1a to 3.1d.
From the figures it is noted that as the axial force is increased, the natural frequency
increases, and the reverse occurs as the tip mass is increased the natural frequency decreases.
Table 3.1a: 1st frequencies of the beam with a tip mass and axial load: Voltage = 0V.
Voltage = 0V/mm (ω1)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 1.27 1.17 0.84 0.58 0.49 0.4 1.66 1.52 1.10 0.77 0.65 0 1.88 1.72 1.25 0.87 0.74 -1 2.19 2.03 1.48 1.03 0.87 -6 2.87 2.68 1.99 1.40 1.18
-10 3.15 2.96 2.22 1.56 1.32
Figure 3.1a: Change in fundamental frequency vs axial Load ratio: Voltage = 0V

68
The natural frequency is highest for maximum axial tensile load and zero tip mass ratios for
all modes of vibration. In the first mode, the natural frequencies vary non-linearly in a
monotonic manner but in the higher modes the variation tends to be more linear as indicated
in the graphs of the higher modes, Figure 3.2a to 3.4d.
Table 3.1b: 1st frequencies of the beam with a tip mass and axial load: Voltage = 100V.
Voltage = 100 V/mm (ω1)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 1.27 1.14 0.82 0.57 0.48 0.4 1.65 1.51 1.09 0.76 0.64 0 1.87 1.72 1.24 0.87 0.73 -1 2.19 2.02 1.47 1.03 0.87 -6 2.86 2.68 1.99 1.40 1.18 -10 3.15 2.96 2.21 1.56 1.32
Figure 3.1b: Change in fundamental frequency vs axial load ratio: Voltage = 100V
When the axial mass ratio is zero (η = 0), the axial load ratio is compressive (k = +0.8) and
the piezo layers are inactive )V0( =−+V , the natural frequency of the beam is ω1 = 1.2472s-1
in the first mode. When a maximum voltage )V1000( =−+V is applied, the natural frequency
decreases to ω1 = 0.7051s-1, which is percentage difference of 44%; indicating that the
natural frequency of vibration can be controlled using piezo actuators.

69
The change in natural frequency becomes less pronounced when the axial load ratio goes
from compressive to tensile. At an axial load ratio (k = -1) the percentage difference is
1.83% and beyond that, at (k = -6) the difference is less than 1%. There is a point between
(k = -1) and (k = -6) where the piezo loses its efficacy. This efficacy cut-off point is
investigated later in the study.
Table 3.2c: 1st frequencies of the beam with a tip mass and axial load: Voltage = 500V.
Voltage = 500 V/mm (ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 1.11 1.02 0.73 0.51 0.43 0.4 1.61 1.47 1.06 0.80 0.62 0 1.84 1.69 1.22 0.85 0.72 -1 2.18 2.01 1.46 1.02 0.86 -6 2.86 2.67 1.99 1.39 1.18 -10 3.15 2.95 2.21 1.55 1.31
Figure 3.1c: Change in fundamental frequency vs axial load ratio: Voltage = 500V
From Table3.1a to Table 3.1d and the Figures 3.1a to 3.4d it is noted that as the axial force
ratio increases and the tip mass ratio is kept constant the natural frequencies increase, similar
to a guitar string. The lowest frequencies occur when the beam is in compression. When
keeping the axial load constant and increasing the tip mass the natural frequencies are
reduced significantly. The axial load and the tip mass have opposite effects on the natural

70
frequencies and both are dominant beyond a particular threshold, such that the piezo actuator
loses control effectiveness.
In tensile load, the gradient of the curves for frequency versus axial load ratio are smaller
than in compression. In compression at maximum input voltage the slope is steeper than the
slopes of the curves at lower voltages ( 0V, 100V, 500V). This shows that the most effective
control can be achieved at a voltage of 1000V. The maximum input voltage is limited to
1000V/mm to prevent piezo breakdown and to facilitate for a bench mark comparison with
other reseachers.
Table 3.1d: 1st frequencies of the beam with a tip mass and axial load: Voltage = 1000V.
Voltage = 1000 V/mm (ω1) Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 0.66 0.73 0.53 0.37 0.31 0.4 1.54 1.41 1.02 0.71 0.60 0 1.79 1.65 1.19 0.83 0.70 -1 2.15 1.99 1.45 1.01 0.85 -6 2.86 2.67 1.98 1.39 1.18 -10 3.14 2.95 2.21 1.55 1.31
Figure 3.1d: Change in fundamental frequency vs axial load ratio: Voltage = 1000V
From Figures 3.1a and 3.1d it can observe that the frequencies at k = -10 are identical to two
decimal places. Tables 3.1c and 3.1d show that there is an overall drop in natural frequency

71
when the voltage is increased from 0V to 1000V and the axial load ratio is -1 ≤ k ≤ +0.8. At
k = -6 and k = -10 the difference is very small, see Figures 3.1a to 3.1d. That shows that
there is a loss of control effectiveness of the piezo actuators beyond a certain axial load ratio.
3.2.2 Second natural frequencies (ω2)
In the 2nd mode of vibration the maximum natural frequency (ω2 = 5.9240s-1) occurs at
maximum tensile load ratio (k = -10) and the minimum natural frequency (ω2 = 4.5310s-1)
occurs at the critical axial load ratio (k = +0.8.) We also note that as the tip mass ratio is
increased the natural frequency drops.
Table 3.2a: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 0V.
Voltage = 0V/mm (ω2)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 4.53 4.26 3.93 3.85 3.84 0.4 4.62 4.33 3.98 3.90 3.89 0 4.69 4.40 4.03 3.95 3.94 -1 4.88 4.56 4.15 4.06 4.05 -6 5.55 5.17 4.64 4.52 4.51 -10 5.92 5.52 4.94 4.81 4.79
Figure 3.2a: Change in 2nd frequency vs axial load ratio: Voltage = 0V

72
The gradients of the curves in Figures 3.2a to 3.2d are uniform, indicating that the change is
almost linear at the higher modes of vibration. The maximum percentage change is slightly
less than 0.5% when the input voltage is V1000=−+V . The observation from Table 3.2a and
3.2d is that beyond η = 0.1, as the tip mass ratio increases the percentage difference drops and
becomes negligible.
Table 3.2b: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 100V.
Voltage = 100V/mm (ω2)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 4.53 4.26 3.92 3.85 3.84 0.4 4.61 4.33 3.98 3.90 3.89 0 4.69 4.40 4.03 3.95 3.94 -1 4.87 4.56 4.15 4.06 4.05 -6 5.54 5.16 4.64 4.52 4.51 -10 5.92 5.52 4.94 4.81 4.79
Figure 3.2b: Change in 2nd frequency vs axial load ratio: Voltage = 100V
The ineffenctiveness of the piezo can also be observed in the higher modes of vibration, see
results in Appendix A1 to A3. The piezo actuator has insufficient or no control in the higher
mode of vibration except for the fundamental mode (ω1). At the higher modes, when the tip
mass is kept constant and the input voltage is varied, the curves overlap. This implies that the
voltage has no effect on the natural frequencies.

73
In the 2nd mode of vibration shown in Figure 3.2c and 3.2d, when the input voltage is
V500=−+V and V1000 the gradient of the curves is approximately linear and the natural
frequencies are impossible to differentiate to two decimal places, see Tables 3.2c and 3.2d.
That only confirms that the piezo actuators has an insignificant effect on the higher modes of
vibration and that only the fundumental mode can be controlled effectively. Lastly, the curves
of Figures 3.2a to 3.2d are identical in the second mode of vibration regardless of the electric
field induced.
Table 3.2c: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 500V.
Voltage = 500V/mm (ω2)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 4.52 4.25 3.92 3.85 3.84 0.4 4.61 4.33 3.98 3.90 3.89 0 4.69 4.39 4.03 3.95 3.94 -1 4.87 4.55 4.15 4.06 4.05 -6 5.54 5.16 4.64 4.52 4.51 -10 5.92 5.52 4.94 4.81 4.79
Figure 3.2c: Change in 2nd frequency vs axial load ratio: Voltage = 500V

74
Table 3.2d: 2nd frequencies of the beam with a tip mass and axial load: Voltage = 1000V.
Voltage = 1000V/mm (ω2)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 4.51 4.25 3.92 3.85 3.84 0.4 4.60 4.32 3.98 3.90 3.89 0 4.68 4.39 4.03 3.95 3.94 -1 4.86 4.55 4.15 4.06 4.05 -6 5.54 5.16 4.64 4.52 4.51 -10 5.92 5.52 4.94 4.81 4.79
Figure 3.2d: Change in 2nd frequency vs axial load ratio: Voltage = 1000V
3.2.3 Third natural frequencies (ω3)
In the 3rd mode of vibration when the tip mass is zero, the maximum natural frequency is
ω3 = 8.6870s-1 and the minimum natural frquency is ω3 = 7.7750s-1 for axial load ratio
k = -10 and k = +0.8 at zero voltage, respectively. The trends in the natural frequency are as
previously observed in the first and second mode. The natual frequencies at maximum
voltage )V1000( =−+V are very similar as shown in Table 3.3a and 3.3d. It is also evident
that for all k and η > 0.1, the natural frequencies are identical regardless of input voltage to
the piezo actuators. The percentage change in the natural frequency is less than 0.1% for zero

75
tip mass ratio (η = 0) and decreases to less than 0.006% for tip mass ratio (η = 10), see
Appendix A2.
Table 3.3a: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 0V.
Voltage = 0V/mm (ω3)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 7.78 7.38 7.07 7.02 7.01 0.4 7.82 7.42 7.10 7.05 7.05 0 7.86 7.45 7.13 7.08 7.08 -1 7.95 7.54 7.21 7.16 7.15 -6 8.39 7.92 7.55 7.50 7.49 -10 8.69 8.19 7.80 7.74 7.73
Figure 3.3a: Change in 3rd frequency vs axial load ratio: Voltage = 0V
From the data in Figures A1-1 to A3-4 in Appendix A1 to A3, it can be concluded that in the
second, third and fourth modes of vibration , the piezo actuators have minimal control over
the vibrations of the system. It is also observed from the Tables 3.3a to 3.4d, that the natural
frequencies for the system are identical to two decimal places in the third mode. It is also
noted that as the tip mass increseases the natural frqeuncies become identical for varying
voltage inputs. That leads to the conclusion that as we increas the tip mass ratio, the piezo
actuators have absolutly no effect vibrations of the beam and the tip mass is the dominant
parameter. In Figures 3.2a to 3.2d it is noted that in the higher modes of vibratio the curves
at tip mass ratio η = 5 and η = 10 overlap and the frequencies are identical.

76
Table 3.3b: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 100V.
Voltage = 100V/mm (ω3)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 7.77 7.38 7.07 7.02 7.01 0.4 7.81 7.42 7.10 7.05 7.05 0 7.85 7.45 7.13 7.08 7.08 -1 7.95 7.53 7.21 7.16 7.15 -6 8.39 7.92 7.55 7.50 7.49 -10 8.69 8.19 7.80 7.74 7.73
Figure 3.3b: Change in 3rd frequency vs axial load ratio: Voltage = 100V
This leads to the conclusion that beyond η ≥ 5 the natural frequencies are constant or
converge to a particular value. This further indicates that the cantilever starts to behave like a
clamped-pinned beam because of the large mass at the tip.
Table 3.3c: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 500V.
Voltage = 500V/mm (ω3)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 7.77 7.38 7.07 7.02 7.01 0.4 7.81 7.42 7.10 7.05 7.05 0 7.85 7.45 7.13 7.08 7.08 -1 7.95 7.53 7.21 7.16 7.15 -6 8.38 7.92 7.55 7.50 7.49 -10 8.69 8.19 7.80 7.74 7.73

77
Figure 3.3c: Change in 3rd frequency vs axial load ratio: Voltage = 500V
Table 3.3d: 3rd frequencies of the beam with a tip mass and axial load: Voltage = 1000V.
Voltage = 1000V/mm (ω3)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 7.77 7.38 7.07 7.02 7.01 0.4 7.81 7.41 7.10 7.05 7.05 0 7.85 7.45 7.13 7.08 7.08 -1 7.95 7.53 7.21 7.16 7.15 -6 8.38 7.92 7.55 7.50 7.49 -10 8.68 8.19 7.80 7.74 7.73
Figure 3.3d: Change in 3rd frequency vs axial load ratio: Voltage = 1000V

78
3.2.4 Fourth natural frequencies (ω4)
In the 4th mode of vibration the natural frequency band is between 10s-1 and 11s-1 , see
Figures 3.4a to 3.4d. The percantage differences in the natural frequency for zero tip mass
(η = 0) to maximum tip mass ratio (η = 10) for a maximum compressive load (k = +0.8) and
maximum tension (k = -10) are approximately 7% in the fourth mode compared to about 60%
in the first mode for an uncontrolled beam )V0( =−+V .
Table 3.4a: 4th frequencies of the beam with a tip mass and axial load: Voltage = 0V.
Voltage = 0V/mm (ω4)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 10.94 10.47 10.21 10.18 10.17 0.4 10.97 10.50 10.23 10.20 10.19 0 11.00 10.52 10.26 10.22 10.22 -1 11.06 10.58 10.31 10.27 10.27 -6 11.37 10.86 10.57 10.53 10.53 -10 11.60 11.06 10.77 10.73 10.72
Figure 3.4a: Change in 4th frequency vs axial load ratio: Voltage = 0V
As the mode number increases the frequency band narrows from 60% to 23% to 10% and to
7% in the 1st , 2nd , 3rd and 4th modes of vibration, respectively. For a controlled beam
)V1000( =−+V the frequency is approximaely 78% in the 1st mode and 7% in the fourth

79
mode. In the fourth mode the difference is approximately 7% for both uncontrolled and
controlled beam. This shows the eneffectiveness of the piezo actuators in the higher modes.
These frequencies will converge as the mode number increases to infinity, n → ∞. In the
higher modes, when the axial load is kept constant and the tip mass is increased steadily, the
difference in succesive frequencies becomes smaller, see Table A1a to A3e in Appendix A1
to A3.
Table 3.4b: 4th frequencies of the beam with a tip mass and axial load: Voltage = 100V.
Voltage = 100V/mm (ω4)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 10.94 10.47 10.21 10.18 10.17 0.4 10.97 10.50 10.23 10.20 10.19 0 11.00 10.52 10.26 10.22 10.22 -1 11.06 10.58 10.31 10.27 10.27 -6 11.37 10.86 10.57 10.53 10.53 -10 11.60 11.06 10.77 10.73 10.72
Figure 3.4b: Change in 4th frequency vs axial load ratio: Voltage = 100V
The largest natural frequency for different tip mass ratios always occurs at tensile axial load
ratio, when the beam is in tension at a load ratio of k = -10. On the other side of the load
ratio spectrum, when the beam is in compression and the beam approaches the buckling load
the natural frequencies are smallest.

80
Table3.1a to Table 3.4d indicate the natural frequncies of the beam with a voltage induced on
the top and bottom pieazo actuator. The natural frequencies for the beam increase as we
increase the axial load and decrease as we increase the tip mass ratio. The effect of the piezo
acutuator is lost when the tensile axial ratio is greater than k = -1.
For the higher modes of vibration, the difference in natural frequency is minimal indicating
that the piezo has no effect on the vibation frequencies and that only the first mode of
vibration can be significantly altered using a piezo actuator. This is the fundamental mode
of vibration which is dominant over the other mode. This also lends it suitable for distributed
parameter system control (Bailey et al., 1985).
Table 3.4c: 4th frequencies of the beam with a tip mass and axial load: Voltage = 500V.
Voltage = 500V/mm (ω4)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 10.94 10.47 10.21 10.18 10.17 0.4 10.97 10.50 10.23 10.20 10.19 0 10.99 10.52 10.26 10.22 10.22 -1 11.06 10.58 10.31 10.27 10.27 -6 11.37 10.86 10.57 10.53 10.53 -10 11.60 11.06 10.77 10.73 10.72
Figure 3.4c: Change in 4th frequency vs axial load ratio: Voltage = 500V

81
Table 3.4d: 4th frequencies of the beam with a tip mass and axial load: Voltage = 1000V.
Voltage = 1000V/mm (ω4)
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 10.94 10.47 10.21 10.18 10.17 0.4 10.97 10.50 10.23 10.20 10.19 0 10.99 10.52 10.26 10.22 10.22 -1 11.06 10.58 10.31 10.27 10.27 -6 11.37 10.86 10.57 10.53 10.53
-10 11.60 11.06 10.77 10.73 10.72
Figure 3.4d: Change in 4th frequency vs axial load ratio: Voltage = 1000V
3.3 Change in natural frequencies for varying axial load, tip mass
and voltage
3.3.1 First natural frequencies (fundamental mode)
This section covers the discussion on the changes caused by application of voltage on the
natural frequencies of the system. This study concentrates on the first four frequencies
(1st, 2nd, 3rd and 4th modes) of the system, where the 1st frequency is the fundamental
frequency of the system and dominates all the other modes of vibration. Tables 3.5a to 3.5d
show the natural frequencies for particular tip mass ratio, varying axial load ratio and the
percentage change in the natural frequencies of the system of an inactive beam )V0( =−+V

82
and for a beam with active piezo actuators for varying input voltages V500 V,100( =−+V and
V1000 ).
The aim is to quantify the change in the natural frequency between an inactive )V0( =−+V
and an active beam V500 V,100( =−+V and V)1000 The percentage change is derived by
using equation 3.2 below, where ( )iknω represents the natural frequency for a particular tip
mass ratio (i = 0, 0.1, 1, 5, 10), axial load ratio (k = +0.8, 0, -1, -6, -10) and (ωV=j) is the
natural frequency for the varying input voltage (j = V100 , V500 , V1000 ).
( ) 100frequency natural%0
0 ×−
=∆=
==
V
jVVikn ω
ωωω ................................... (3.2)
From Figures 3.5a to 3.5d we can observe that there is a change in the natural frequency of
the beam for the different voltage input, axial load ratio and tip mass ratio. In the first mode
of vibration a maximum change of frequency of approximately 44% for V1000=−+V input is
observed. This high percentage change can be observed when there is a compressive load
and decreases as the column is subjected to a tensile load.
From the Figures 3.5a to 3.5d, in the 1st mode of vibration, we can see that the piezo loses its
effectiveness and the percentage change in the natural frequency drop to below 2% when the
axial load ratio exceeds k = -1. Beyond that the piezo has an insignificant effect on the
natural frequency. The effects of the piezo actuator are of importance between k = +0.8 to
k = -2. The maximum tensile load for this study will thus be limited to an axial load ratio
k = -2, beyond which the beam conforms to the characteristics of an uncontrolled beam. The
percentage changes are approximately 2%. The percentage change can be increased at these
values for axial load ratio and tip mass ratio by increasing thickness of the piezo layers. This
allows for an increased voltage input which in turn alters the moments at the boundaries
which directly affects the natural frequencies.

83
Table 3.5a: 1st Mode frequencies (ω1) with tip mass ratio, η = 0
Axial load Ratio (k)
ω1 V=0V
ω1 V=100V
Δ% ω1 V=100V
ω1 V=500V
Δ% ω1 V=500V
ω1 V=1000V
Δ% ω1 V=1000V
0.8 1.27 1.25 2.15 1.11 12.62 0.66 44.47 0.4 1.66 1.65 0.66 1.61 3.45 1.54 7.39 0 1.88 1.87 0.36 1.84 1.90 1.80 3.97 -1 2.19 2.19 0.16 2.18 0.82 2.16 1.68 -6 2.87 2.87 0.01 2.86 0.13 2.86 0.28 -10 3.15 3.15 0.03 3.15 0.09 3.14 0.17
Figure 3.5a: Percentage change in natural frequency (η = 0)
Table 3.5b: 1st Mode frequencies (ω1) with tip mass ratio, η = 0.1
Axial load Ratio (k)
ω1 V=0V
ω1 V=100V
Δ% ω1 V=100V
ω1 V=500V
Δ% ω1 V=500V
ω1 V=1000V
Δ% ω1 V=1000V
0.8 1.17 1.14 2.17 1.02 12.71 0.66 37.08 0.4 1.52 1.51 0.66 1.47 3.52 1.41 7.53 0 1.72 1.72 0.38 1.69 1.98 1.65 4.12 -1 2.03 2.02 0.18 2.01 0.90 1.99 1.82 -6 2.68 2.68 0.04 2.67 0.18 2.67 0.34 -10 2.96 2.96 0.03 2.95 0.11 2.95 0.21
Figure 3.5b: Percentage change in natural frequency (η = 0.1)

84
Table 3.5c: 1st Mode frequencies (ω1) with tip mass ratio, η = 1
Axial load Ratio (k)
ω1 V=0V
ω1 V=100V
Δ% ω1 V=100V
ω1 V=500V
Δ% ω1 V=500V
ω1 V=1000V
Δ% ω1 V=1000V
0.8 0.84 0.82 2.17 0.73 12.79 0.53 37.23 0.4 1.10 1.09 0.73 1.06 3.67 1.02 7.79 0 1.25 1.24 0.42 1.22 2.10 1.19 4.35 -1 1.48 1.47 0.19 1.46 0.98 1.45 2.00 -6 1.99 1.99 0.04 1.99 0.23 1.98 0.48 -10 2.22 2.21 0.03 2.21 0.15 2.21 0.30
Figure 3.5c: Percentage change in natural frequency (η = 1)
Table 3.5d: 1st Mode frequencies (ω1) with tip mass ratio, η = 5
Axial load Ratio (k)
ω1 V=0V
ω1 V=100V
Δ% ω1 V=100V
ω1 V=500V
Δ% ω1 V=500V
ω1 V=1000V
Δ% ω1 V=1000V
0.8 0.58 0.57 2.19 0.51 12.83 0.37 37.27 0.4 0.77 0.76 0.69 0.74 3.66 0.71 7.80 0 0.87 0.87 0.43 0.85 2.14 0.83 4.41 -1 1.03 1.03 0.18 1.02 0.99 1.01 2.04 -6 1.40 1.40 0.06 1.39 0.27 1.39 0.54 -10 1.56 1.56 0.07 1.55 0.20 1.55 0.36
Figure 3.5d: Percentage change in natural frequency (η = 5)

85
3.3.2 2nd, 3rd and 4th Natural frequency (higher modes)
In the higher modes of vibration, Figures A1-1 to A3-5 in Appendix A1 to A3, it is observed
that the piezo has very little or no effect on the frequencies of vibration of the beam. In the
second mode of vibration we have a maximum percentage change in natural frequency of
0.4%. From Figures A1-1 to A3-5 it is also noticed that the percentage change decreases to
less than 0.02%, as the tip mass ratio increases. The natural frequencies versus axial load at
different tip masses indicate that they have a monotonic relation. An increase in the load in
tension results in an increase in the natural frequency of the mode of vibration, but as the tip
mass increases the natural frequency decreases.
The voltage induced on the piezo layers causes a contraction or extension of the two layers,
i.e. bottom and top layer. The resultant strain induces a moment on the beam at the
boundaries, and therefore causes a change in the natural frequencies of the beam. The
percentage change in the natural frequencies of the beam due to the magnitude of the input
voltage is tabulated in Appendix A1 to A3. Another observation is that for a constant tip
mass ratio and varying voltage input the curves are stacked on top of each other. The only
explanation is that the varying voltage input (0V < V−+ ≤ 1000V) does not have an effect on
the natural frequencies of the beam in the 2nd, 3rd and 4th mode of vibration.
3.4 Natural frequencies versus change in tip mass
To investigate the change in natural frequencies of the beam due to the change in tip mass;
the change in frequency versus tip mass is plotted in Figures 3.6a to 3.6d, and the natural
frequency at zero tip mass is compared with the natural frequencies as the tip mass is varied
for a particular axial load. An increase in the induced voltage on the piezo layers
significantly changes in the fundamental natural frequencies but the effects become less
pronounced in the higher modes. The percentage change can be calculated in the following
relation:
( ) 100frequency natural%0
0 ×−
=∆=
==
η
ηη
ωωω
ω jkin ....................................... (3.3)

86
where (ωη=j) represents the natural frequency for a particular tip mass ratio (j = 0, 0.1, 1, 5),
axial load ratio (k = +0.8, 0, -1, -6, -10) and ( )kinω is the natural frequency for the varying
input voltage (i = 0, 100V, 500V, 1000V).
Figure 3.6a: 1st Frequency vs tip mass ratio: Voltage = 0V
When the tip mass ratio is increased in the first mode there is approximately 60% maximum
decrease in natural frequency and approximately 20%, 12% and 8% in the 2nd, 3rd and 4th
mode, respectively. The slope of the graphs in Figures 3.6a to 3.9d, is much steeper when the
tip mass ratio is between (η = 0) and (η = 1) and decreases as the maximum tip mass ratio is
approached. As the tip mass ratio increases the slope decreases and the change in natural
frequency for an additional mass becomes small. As tip mass ratio increases the beam starts
to behave like a clamped-pinned beam (Balachandran et al., 2009).
In the higher modes the slope also levels off when the tip mass ratio goes beyond (η = 1). It
is also observed that effective piezo control can be achieved in the fundamental mode
(1st mode), because the largest changes in frequency occur in this mode. This is evident when
the graphs at zero voltage )V0( =−+V Figure 3.6a and at maximum voltage )V1000( =−
+V
Figure 3.6d are compared for the 1th mode frequencies the curves in the graphs are different.
Whereas, Figure 3.9a and 3.9d are the plots for the 4th mode frequencies at zero and
maximum voltage and the graphs are almost identical.

87
Figure 3.6b: 1st Frequency vs tip mass ratio: Voltage = 100V
The highest natural frequencies (ω = 3.149s-1) occurs when the beam is under tension at
(k = -10) and there is zero tip mass (η = 0). When an input voltage of 1000V is applied to the
piezo, there is only a slight change in the natural frequency (ω = 3.1438s-1) or 0.17% change.
Figure 3.6c: 1st Frequency vs tip mass ratio: Voltage = 500V
This indicates that the piezo produces no noticeable change in the vibration characteristics of
the structure. However, when the beam is subject to a compressive axial load (k = +0.8) at
zero tip mass ratio (η = 0), the natural frequency when the piezo layers are inactive
)0( VV =−+ is (ω = 1.2744 s-1), see Figure 3.6a. When an input voltage )V1000( =−
+V is

88
applied to the bottom and top layer, the natural frequency is significantly reduced to
(ω = 0.7051s-1). That represents a change of 44% reduction in the natural frequency.
Figure 3.6d: 1st Frequency vs tip mass ratio: Voltage = 1000V
When adding an incremental tip mass there is approximately 8%, 38% and 55% drop in the
natural frequencies from the reference point (η = 0) for tip mass ratio of η = 0.1, 1, and 5
respectively. Beyond a tip mass ratio of η = 5 the slope of the curves flatten, which means
that a large change in tip mass ratio is required for a slight change in the frequency. So then,
as tip mass ratio increases the frequency converges to some value in the limit as n→∞. This
occurs for all the various voltage input to the piezo actuators.
Figure 3.7a: 2nd Frequency vs tip mass ratio: Voltage = 0V

89
At maximum voltage input )V1000( =−+V the frequencies are lower when the beam is in
maximum compression (k = +0.8). Figure 3.6a to 3.9d, show that the curves for maximum
compressive load are always at the bottom of the set of curves.
At maximum tensile load (k = -10) and zero tip mass ratio (η = 0), the frequencies are the
same for the various voltage inputs, indicating the piezo is ineffective. The percentage
difference between a beam with zero voltage and a beam with maximum voltage input is
0.33%. In Figure 3.6a and Figure 3.6d, the bottom most curves are different in values when
the system is undergoing a compressive load. The top most curves are due the maximum
tensile load (k = -10) and again a comparison of the above mentioned figures shows that the
curves are identical. This indicates that at maximum tensile load the frequency are not
affected by the piezo.
Figure 3.7b: 2nd Frequency vs tip mass ratio: Voltage = 100V
The gradient of the graphs Figure 3.7a to 3.7d decreases as the tip mass ratio increases for the
2nd mode of vibration. This indicates that as the tip mass increases, the percentage change in
natural frequency converge. This will resemble a clamped pinned beam (Tse et al., 1979) in
the limit as η → ∞.

90
Figure 3.7c: 2nd Frequency vs tip mass ratio: Voltage = 500V
In the 1st mode of vibration Figure 3.6a to 3.6d it is noted that there is a change in gradient as
the tip mass ratio of the curves approaches maximum tip mass, η →5. This indicates that the
first natural frequencies of the system will change beyond maximum tip mass ratio (η = 5),
although the difference gets smaller as the tip mass ratio increases.
Figure 3.7d: 2nd Frequency vs tip mass ratio: Voltage = 1000V

91
Figure 3.8a: 3rd Frequency vs tip mass ratio: Voltage = 0V
In the 2nd, 3rd, 4th modes of vibration Figure 3.7a to 3.9d the gradient approaches zero when
the tip mass ratio (η) is approximately 1. Beyond this point the tip mass dominates the other
parameter. For this reason, the maximum tip mass ratio for this investigation was limited to
η ≤ 5.
Figure 3.8b: 3rd Frequency vs tip mass ratio: Voltage = 100V

92
Figure 3.8c: 3rd Frequency vs tip mass ratio: Voltage = 500V
In the 3rd and 4th mode of vibration when the tip mass ratio is beyond η = 1 the gradient of the
curves flattens out and the other parameters have an insignificant effect on the frequencies,
Figure 3.8a to 3.9d. The increase in voltage input to the piezo actuators does not induce
enough strain to alter the vibration characteristics of the system.
Figure 3.8d: 3rd Frequency vs tip mass ratio: Voltage = 1000V

93
Figure 3.9a: 4th Frequency vs tip mass ratio: Voltage = 0V
When the axial load ratio (k) is constant and the input voltage is varied the percentage change
in frequency, between inactive )V0( =−+V beam and an active one V500 V,100( =−
+V and
V)1000 can be determined. This percentage change drops as the axial load is increased up to
k = -1, and thereafter remains constant as the axial load is increased. If the fundamental
frequencies (ω1) are excluded, the largest percentage change in natural frequency
(Δ% = 0.3894) occurs in the 2nd mode of vibration at maximum voltage input and axial load
ratio of k = +0.8, see the tables in Appendix A1.
Figure 3.9b: 4th Frequency vs tip mass ratio: Voltage = 100V

94
This can also be observed in Figures 3.7a to 3.9d, where the slopes of the curves approach
zero beyond tip mass ratio η = 1. The smallest percentage changes in natural frequency for
varying axial load ratio and input, occurs in the 4th mode of vibration when the tip mass ratio
η = 5. A further investigation of the graph, Figures 3.7a, shows that the percentage change in
natural frequency, between a beam with zero tip mass (η = 0) and another with varying tip
mass (η > 0), starts to level off as when the tip mass ratio is beyond η ≥ 1, for the 2nd, 3rd and
4th mode.
Figure 3.9c: 4th Frequency vs tip mass ratio: Voltage = 500V
Figure 3.9d: 4th Frequency vs tip mass ratio: Voltage = 1000V
In contrast, the graphs of the 1st mode (Figures 3.6a to 3.6d), show a slope that is much
steeper for all voltage input. This leads to the conclusion that the piezo actuators will be

95
effective at a maximum tip mass ratio η = 5 in the 1st mode, and a tip mass ratio of η ≈ 1 for
the 2nd, 3rd and 4th mode of vibration.
Judging from Figures 3.5a to 3.5d, one can clearly see that the graphs for the different voltage
input overlap, whereas those of Figure 3.5a to 3.5d indicate a convergence at a tensile load
ratio k ≈ -2. This goes to show that the piezo will not control higher modes but is very
effective in the fundamental mode. From the above data, the maximum axial load ratio and
tip mass ratio will be limited to k = -2 and η = 5. At these limits, the fundamental mode of
vibration, which is the dominant mode, can be controlled. A cursory glance at the figures of
the higher modes of vibration for an inactive and an active beam reveal that the curves are
identical regardless of the voltage input.
3.5 Percentage change in natural frequencies with change in axial
load
Figures 3.10a to 3.13d are the plots of percentage changes in the natural frequency on the
column versus axial load. A comparison is made between the frequency of the column with
varying axial load ratio (k = +0.8, +0.4, 0, -1, -2, -6, -10) to that of the column with zero axial
load ratio (k = 0). The different curves are for varying tip mass ratios.
( ) 100frequency natural%0
0 ×−
=∆=
===
k
jkkiiV ω
ωωω η .............................. (3.4)
Equation 3.4 is used to calculate the percentage difference in the natural frequency where,
( )ηω iiV = represents the natural frequency for a particular voltage input (i = 0, 100V, 500V,
1000V), tip mass ratio (η = 0, 0,1, 1, 5, 10) and (ωk=j) is the natural frequency for the varying
axial load ratio (j = +0.8,+0.4,0,-1,-2,-6,-10). It is observed that the biggest change occurs at
maximum axial load (k = -10) which indicated an increase in the frequency of approximately
80% for a tensile axial load and when the axial load is compressive there is a maximum
decrease in frequency of approximately 33% in the first mode of vibration when the piezo
actuators are inactive )V0( =−+V .

96
When the input voltage to the piezo actuators is increased the natural frequencies of the
system change. For 100V input, at a tensile axial load ratio (k = -10), the change in natural
frequency is approximately 80% and for compressive axial load ratio (k = +0.8) the change is
33%. When there is an increase the voltage input to 500V, there is a change in the natural
frequency of 83% in tension and 39% in compression. At 1000V, the maximum change in
natural frequency for at maximum tensile load is 86% and at maximum compressive load
ratio the change is 55%.
It is observed that the larger changes in natural frequency when there is axial load and piezo
actuators are active. In tension at k = -10 the change are almost identical with a maximum
difference of 6% regardless of the state of the piezo actuators (active or inactive), but in
compression at k = +0.8 the difference is about 22% when the piezo actuators are inactive
compared to when they are active with a maximum input voltage )V1000( =−+V . In view of
that, it will be acceptable to decrease the tensile load ratio threshold. In compression the
piezo actuator have notable effect on the natural frequencies.
From the plots Figures 3.10a to 3.13d it is noted that beyond a tensile axial load ratio of
k < -2, the different graphs diverge. At this load ratio load, the axial load parameter starts to
dominate over the other parameters and thus the maximum axial load ratio is set at k = -2. A
closer look shows that at higher vibration modes, the graphs diverge at axial load ratio k ≤ -1.
The axial load and the tip mass have the opposite effects on the natural frequencies. The
former tends to increase the natural frequencies whilst the latter decreases the frequencies.
At some point the axial load dominates and its effects are more pronounced.
Given these results the maximum tip mass ratio is limited to η ≤ 5. The percentage change in
frequency decreases as the mode number increases. At an axial load ratio k = -2, there is an
increase of more than 20% and at axial load ratio k = -1 the change is ±20% in the 1st mode.
In the 2nd, 3rd and 4th mode the percentage difference at k = -2 is approximately 5%, 2%
and1%, respectively. The graphs also indicate a similar trend in the percentage change in
natural frequency in the higher modes of vibration at varying voltage inputs. The percentage
difference becomes lower as the mode increases, from a maximum percentage change of
approximately 80% at k = -10 and 25% at k = -2, in the higher modes to about 25% at k = -10
and 6% at k = -2.

97
Furthermore we observe that the graphs for tip mass ratio η = 5 and η = 10 overlap,
indicating that the tip mass ratio limit can be set at η ≤ 5. With a tip mass ratio of η = 5 the
natural frequencies differ by 0.36% in the first mode, see Table 3.5d, and to a large extent
less than 1% in the higher modes, Appendix A1 to A3, Table A1d and A1e, A1d and A2e and
Table A3d and A3e. From the above plots, Figures 3.10a to 3.13d indicate the percentage
change in frequency for varying tip mass ratios. In the first mode of vibration there is a
maximum percentage change of 80% for maximum axial load ratio of k = -10 and about 40%
change in maximum compression k = +0.8. These differences are huge and indicate that the
column’s vibration frequencies are significantly affected. With the piezo voltage input at
1000V there is a significant change in the frequency. In the higher modes of vibration, there
is a change of 25% for the 2nd mode, 10% for 3rd mode and 5% for the 4th mode. It can be
concluded that the effects on the frequency becomes smaller as the mode of vibration
increases.
Figure 3.10a: Changes in the natural frequency (ω1) vs axial load for V = 0V
Figure 3.10b: Changes in the natural frequency (ω1) vs axial load for V = 100V
Figure 3.10c: Changes in the natural frequency (ω1) vs axial load for V = 500V
Figure 3.10d: Changes in the natural frequency (ω1) vs axial load for V = 1000V

98
Figure 3.11a: Changes in the natural frequency (ω2) vs
axial load for V = 0V
Figure 3.11b: Changes in the natural frequency (ω2) vs axial load for V = 1000V
Figure 3.12a: Changes in the natural frequency (ω3) vs axial load for V = 0V
Figure 3.13a: Changes in the natural frequency (ω4) vs axial load for V = 0V
Figure 3.12b: Changes in the natural frequency (ω3) vs
axial load for V = 1000V
Figure 3.13b: Changes in the natural frequency (ω4) vs
axial load for V = 1000V

99
Chapter 4 – Computation of frequencies with an extended tip mass
4.1 Determination of the natural frequencies for a beam with an
extended tip mass and tip inertia
The natural frequencies of a beam with an extended mass are different from those with a
concentrated mass. When dealing with an extended tip mass, one needs to take the effects of
the rotary inertia of the tip mass into account and also the fact that the center of gravity of the
tip mass is a distance away from the end of the beam. This introduces an additional moment
at the end of the beam, where the distance (b1) in Figure 4.1 below is the moment arm. An
investigation into the natural frequencies of a cantilever with an extended tip mass, taking the
effects of rotary inertia into account is conducted below. The results are used to compare the
change in natural frequencies with change in piezo induced voltage. Figure 4.1 shows a
diagram of beam with an extended tip mass, where b1 > 0. Setting b1 = 0 the mass becomes
concentrated at the tip.
Figure 4.1: Cantilever beam with an extended tip mass
The new boundary conditions can be written in the following manner:
( ) ( ) ( ) ( ) ( )Lx
ATTcc tLwCtx
tLwbmJt
tLwbmx
tLwIE=
=−
∂∂∂
++∂
∂+
∂∂ 0,,,,
02
3212
2
12
2
. (4.1)
L b2
b1
Piezoelectric layer
Piezoelectric layer
Beam
Tip mass (mT)
c.g.
Tip inertia (J)
Axial load (N)

100
and,
( ) ( ) ( ) ( )Lx
TTcc xtLwN
txtLwbm
ttLwm
xtLwIE
=
=
∂∂
+∂∂
∂+
∂∂
−∂
∂ 0,,,,2
3
12
2
3
3
…..….. (4.2)
Equation 4.1 and 4.2 represent the moment and shear boundary conditions at the tip of the
beam. In equation 4.1 two additional terms are introduced. The second term accounts for the
moment due to the force exerted through the center of the tip mass. The third term accounts
for the rotary inertia of the beam as it vibrates transversely. Equation 4.2 has one additional
term which is the shear effects at the tip of the beam. Using a separable solution of the form
encountered earlier:
∑∞
=
=1
)()(),(n
nn tTxXtxw ….…….……..…………..........................…….. (4.3)
and the two equations can be written in this form:
( ) ( )
( ) ( ) ( ) 0)()()()(
)()()()(
02
321
2
2
12
2
=−∂∂
∂++
∂∂
+∂
∂
tTLXCtx
tTLXbmJ
ttTLXbm
xtTLXIE
AT
Tcc
………………….….. (4.4)
( ) 0)()()()(
)()()()(
0'2
1
1''
=−++
+
tTLXCtTLXbmJtTLXbmtTLXIE
AT
Tcc
………………………..…... (4.5)
Now substitute the time solution 0)()( 2..
=+ tTtT nnn ω into equation 4.4 and divide by T(t) and
using equation 2.58a and 2.58b to arrive at the following in short notation:
( ) 0)()())()((
))()(()()(
02'2
1
21
''
=−−++
−+
tTLXCtTLXbmJtTLXbmtTLXIE
AT
Tcc
ω
ω……………..……….. (4.6)

101
( ) 0)()()()(
)()()(
0'22
1
12''
=−−++
−+
tTLXCLXbmJLXbmLXIE
AT
Tcc
ω
ω.......................................... (4.7)
0)()(
)()()(
0'2
21
'22
1''
=−−
−−
LXIE
CLX
IEm
mm
b
LXIE
mmJLX
IEm
mm
bLX
cc
A
cc
c
c
T
cc
c
ccc
c
c
T
ω
ωω
........................................ (4.8)
where, 2LmJ T=
0)()(
)()()(
0'2
21
'2
22
1''
=−−
−−
LXIE
CLX
IEm
mm
b
LXIE
mmm
LLXIE
mmm
bLX
cc
A
cc
c
c
T
cc
c
c
T
cc
c
c
T
ω
ωω
…………… …..…… (4.9)
0)()()()()( '421
'4241
'' =−−−− LXCLXabLXaLLXabLX Aηηη …….…. (4.10)
Equation 4.10 above is the moment boundary condition at the end of the beam.
Equation 4.11 is the general form of the shear boundary condition at the end of the beam,
which is presented in the spatial domain and time domain. After using the general solution
and the time solution, the result is expressed in short form in equation 4.16.
( ) ( )
( ) ( ) 0)()()()(
)()()()(
3
3
2
3
12
2
=∂
∂−
∂∂
−
∂∂∂
−∂
∂
xtTLXN
xtTLXIE
txtTLXbm
ttTLXm
cc
TT
…………….....……..….. (4.11)
0)()()()()()()()( '''''1 =−−− tTLNXtTLXIEtTLXbmtTLXm ccTT
…. (4.12)
0)()(
)()())()(())()(('
'''2'1
2
=−
−−−−
tTLNXtTLXIEtTLXbmtTLXm ccTT ωω
…….… (4.13)

102
0)()(
)()()()()()('
''''21
2
=−
−+−
tTLNXtTLXIEtTLXbmtTLXm ccTT ωω
…………………. (4.14)
0)()(
)()()()()()(
'
''''2
1
2
=−
−−−
tTLXIE
N
tTLXtTLXIE
mmm
btTLXIE
mmm
cc
cc
c
c
T
cc
c
c
T ωω
………. (4.15)
0)()()()( 4'41
'2''' =+++ LXaLXabLXLX ηηβ ……..…………….…… (4.16)
The above represents the shear boundary condition at the end of the beam in the spatial
domain. Equations 4.10 and 4.16 can be used to find the characteristic equation which will
give us the natural frequencies of the beam under free vibration. After applying general
solution equation 4.17 to the boundary conditions at the free end of the beam, the
characteristic equation is derived below:
( )xpxpBxpppxpCxX nnnn
n
nnnn 122
2
11 coshcossinsinh)( −+
−= …..…. (4.17)
After dropping the subscript (n) and substituting equation 4.17 into the boundary conditions
at the free end the result is two equations in B and C. The moment boundary condition is:
0)]cosh)(cos(
sinh)(sin)([
)]sinhsin)((
cos)(cosh)[(
1222
114
1211
42
221
4
2
1
121
22211
4
2221
41
211
4
=−++
−+−+++
+++
++−−+
LpLpLbpa
LppCbaLppCbappC
LpLpppLbpa
LppCbaLppCbaB
AA
AA
η
ηη
η
ηη
……… ((4.18)
And the shear boundary condition is:

103
0)]sinhsin(
cosh)(cos)([
)]cosh(cossinh)(sin)[(
122
14
1223
1114
2223
2214
2
1
124
1223
1114
2223
2214
=−−
++−+−++
−+
−+−−+
LpLpppa
LppppbaLppppbappC
LpLpaLppppbaLppppbaB
η
βηβη
η
βηβη
.. (4.19)
The characteristic equation is determined by solving equation 4.18 for C and substitute the
results into equation 4.19. The constant B remains undetermined and can be set to unity and
the natural frequencies can be determined for various axial loads, tip mass and piezo voltage
input. The characteristic equation can be written in this form:
]2)2(2[}cosh)1
)()(())]()(
)2(()2()2(
)2()([{sinhsin
}sinh)1)()((]2
2)2(2[cosh{cos
42
41
421
4221
2821
221
22
22
211
422
22211
4
221
2822
22
42
22221
4
221
2821
221
44112
122
121
22
21
44421
4221
281122
ppCCbaLbaaLpLbppppapCpCba
LbappCppCbaLbappCbapLpLp
LpLbpppaaCCbaLbaLppLpp
AA
AA
AA
A
A
A
++−−++++
++−−++−−+
+−++−−++
++++−+
−++−++
+−+−
ββηη
ηββη
ηββη
ηη
ηββ
ηη
(4.20)
4.2 Natural frequencies for a beam with extended tip mass
In the previous discussion (Chapter 3), the tip mass was modeled assuming that it is
concentrated and therefore dimensionless. In this section a more realistic mass is studied,
were the center of gravity for the mass does not pass through the tip of the beam. Figure 4.1
shows the beam with an extended mass such that b1 > 0. For this configuration the effects of
rotary inertia of the mass and study the effects of the relevant parameters e.g. tip mass ratio,
axial load ratio and piezo voltage input are include. The natural frequencies can be obtained
by finding the roots of equation 4.20.
Tables 4.2a to 4.2d and Figure 4.3a to 4.3d are the natural frequencies of a cantilever beam
with an extended tip mass subjected to an axial load for a concentrated tip mass, b1 = 0.
Beyond an axial load k = -2 the axial load dominates and the effects of piezo control are
negligible. The natural frequency increase with axial load ratio and decreases as the tip mass
increases for both controlled and uncontrolled beams. As the moment arm to the center of

104
gravity of the extended tip mass is increased (b1 > 0), the natural frequencies of the beam
decrease. When the tip mass ratio is zero the natural frequencies are the same for all b1 ≥ 0
but are different for varying voltage inputs. With a compressive load the difference
frequency at k = +0.8 is about 50% while at k = -2 it drops to 1%, which indicates that at
beyond k = -2 tensile load ratio the piezo cannot be used for effective control of the
vibrations. The maximum control voltage was taken to be 1000V/mm where the piezo will
breakdown if we increased the input voltage beyond this threshold.
Tables 4.2a to 4.4d indicate the natural frequencies of the beam with tip mass, axial load and
voltage input to the piezo layers. Another parameter is introduced and that is the moment
arm from the tip of the beam to the line of action of the center of gravity of the tip mass,
where b1 = 0, L/2, L/1. When b1 = 0 the system behaves like concentrated tip mass. The
results of Tables 3.1a and 4.2a are derived from equation 3.1 and 4.20, respectively. The
results in Table 3.1a do not account for rotary inertia at the tip of the beam due to the tip
mass, whereas in Table 4.2a, these effects are included. When there tip mass is zero (η = 0)
the results in Table 3.1a, 4.2a, 4.3a and 4.4a are identical for b1 ≥ 0 if the voltage is kept the
same. In this case equation 4.20 reduces to equation 3.1, the frequency equation without any
inertia and this can be verified in Bokaian (1988, 1990).
Figures 4.3a to 3.4d show the plots of natural frequency versus both axial load and tip mass
combined, with rotary inertia. The tip mass ratio is varied from (0 ≤ η ≤ 10) and the axial
load ratio varies from (-2 ≤ k ≤ +0.8) following the discussion in Chapter 3, where we
concluded that beyond a tip mass of η > 5 that the natural frequencies change minimally and
the beam behaves like a clamped-pinned beam. It was also concluded that beyond an axial
load ratio k > -2, the piezo actuators have minimal effect on the natural frequencies of the
system. The figures below show that the maximum natural frequency (ω < 2.5s-1) for all
combinations of the relevant parameters. The highest natural frequency occurs at k = -2 and
η = 0, implying that b1 can take any value. Furthermore, it is noted that the natural
frequencies are almost identical and occur between (2 ≤ ω ≤ 2.5s-1). This further shows that
the axial load dominates all other parameters at this point. For an increasing the tip mass, the
natural frequencies decrease and for a decrease in the tensile axial load to compression the
natural frequencies also decrease.

105
The lowest natural frequency occur at (k = +0.8 and η = 10) for b1 = L/1 at maximum voltage
input )V1000( =−+V , and it occurs at a frequency range (0 ≤ ω ≤ 0.5s-1), see Table 4.4d. For
all the sets of graphs at varying moment arm, (b1 = L/2, L/1), the lowest natural frequency
occurs at maximum voltage input )V1000( =−+V . From the above, we can deduce that as the
moment arm (b1) is increased, the inertia of the tip mass reduces the natural frequency of the
system. Table 4.1 indicates the highest natural frequency of ω = 0.360s-1 for a beam with a
concentrated tip mass and Table 4.1 and 4.4d a natural frequency of ω = 0.1460s-1 at b1 = L/1
at maximum voltage input )V1000( =−+V with inertia taken into consideration. This
constitutes a significant decrease of approximately 52% in the natural frequency if we take
the moment arm to the center of gravity into consideration in the analysis.
Table 4.1: Lowest natural frequencies for k = +0.8 and η = 10.
Voltage
b1 = 0 b1 = L/10 b1 = L/5 b1 = L/2 b1 = L/1 0V 0.36 0.35 0.34 0.32 0.28
100V 0.35 0.34 0.28 0.31 0.28 500V 0.31 0.30 0.29 0.27 0.24
1000V 0.19 0.19 0.18 0.16 0.15
Figure 4.2: Lowest Natural frequencies of system at k = +0.8 and η = 10
In Figures 4.3a to 4.3d the graphs have a range of 0.25 units for different natural frequency
ranges (color coded accordingly). The lowest range of natural frequencies is (0 ≤ ω ≤ 0.5s-1)
when the color of the graph is red and ends where the axial load ratio (k = +0.8) and tip mass
ratio (η = 10). The lowest natural frequencies are listed in Table 4.1. As the voltage input to

106
the piezo actuators is increased from V0=−+V to V1000 , it is observed that the area increases,
indicating that as the voltage increases them system tends to settle more and more at lower
frequencies for the combination of parameters.
From the graphs it is also noted that when the axial load ratio is maximum (k = -2 and η = 0)
the area of the turquoise shading remains the same for all the above mentioned graphs,
Figure 4.3a to 4.3d indicating that around that vicinity, the axial load dominates the other
parameters, including the input voltage. The curves in Figure 4.2 show a non-linear change
in the natural frequencies such that as the voltage increases, the slope of the curve becomes
larger. This indicates that we can achieve greater control/changes of the natural frequencies
at higher input voltages, but the input voltage is limited to 1000V/mm to prevent piezo
breakdown.
4.3 Fundamental frequencies for a beam with an extended tip mass
and rotary inertia
4.3.1 Natural frequencies of a beam with a tip mass, b1 = 0
The tables and figures in this section characterize the natural frequencies of the system. The
moment arm, which is the distance from the tip of the beam to the center of gravity of the
extended mass, is held constant and the voltage varied to determine the effects of the piezo
actuator on the natural frequencies. Every set of four graphs and tables represent a particular
moment arm 1/0 ≤≤ nL , where n = ∞, 2, 1. The discussion is limited to the fundamental
mode (1st natural frequency) of vibration which is the most important. In the discussion of
Chapter 3, it was established that the voltage input in the piezo layers have an insignificant
effect on the higher modes of vibration, i.e. 2nd , 3rd, and 4th natural frequency of vibration.
Figure 4.3a represents the natural frequencies of the beam with varying axial load ratio, tip
mass ratio and the input voltage to the piezo actuators is zero )V0( =−+V . It is apparent that
the lowest natural occur when η = 10 and k = +0.8 and these occur in the range
0.25 <ω < 0.5s-1 and the largest natural frequencies occur at η = 0 and k = -2 in the range of
2.25 <ω < 2.5s-1. A compressive axial load tends to lower the natural frequencies and a

107
tensile axial load increases them whereas, a larger tip mass ratio tends to decrease the natural
frequencies.
Table 4.2a: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 0V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.27 1.01 0.63 0.43 0.36 +0.4 1.66 1.33 0.83 0.56 0.47 +0.2 1.78 1.43 0.88 0.60 0.50
0 1.88 1.51 0.93 0.63 0.53 -0.4 2.03 1.64 1.01 0.67 0.53 -1 2.19 1.78 1.09 0.73 0.62 -2 2.40 1.96 1.18 0.79 0.67
Figure 4.3a: Natural frequency vs axial load and tip mass for b1 = 0 and V = 0V
When the plots for V100=−+V and V500=−
+V in Figures 4.3b and 4.3c are analyzed, it is
noted that area covered in the brown (0.25 <ω < 0.5s-1) increases as the input voltage is
increased. This means that due to the increase in the input voltage to the piezo actuators,
there is a greater occurrence of the frequencies in the range 0.25 <ω < 0.5s-1. By so doing
the natural frequencies of the composite beam are altered by inducing a voltage and it
therefore follows that the vibration of the beam can be controlled using piezo actuators.
Axial Load
Ratio

108
Table 4.2b: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 100V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.24 0.99 0.62 0.42 0.35 +0.4 1.65 1.32 0.82 0.55 0.47 +0.2 1.77 1.42 0.88 0.59 0.50
0 1.87 1.50 0.93 0.63 0.53 -0.4 2.02 1.63 1.00 0.68 0.57 -1 2.19 1.78 1.08 0.73 0.61 -2 2.39 1.95 1.18 0.79 0.67
Figure 4.3b: Natural frequency vs axial load and tip mass for b1 = 0 and V = 100V
At maximum input voltage )V1000( =−+V there is the largest decrease in natural frequencies
and the lowest of these frequencies are in the range of 0 < ω < 0.25s-1. From Table 4.2d it is
noted that the lowest natural frequency is ω = 0.1855s-1 and occurs at η = 10 and k = +0.8 in
comparison to the lowest frequency is (ω = 0.3614s-1) for an inactive beam, Tables 4.2a and
4.4d shows a 49% decrease in the frequencies when maximum input voltage )V1000( =−+V is
applied.
The highest natural frequency (ω = 2.3972s-1) occurs when there is zero tip mass ratio (η = 0)
and at maximum axial load ratio (k = -2), for an inactive piezo actuator )V0( =−+V . When
the voltage is increased to a maximum )V1000( =−+V there is a decrease in the natural
frequency to (ω = 2.3709s-1), which is a change of approximately 1%. This also supports an
Axial Load
Ratio

109
earlier conclusion that the axial load dominates the other parameters when k ≈ -2. From the
Figures 4.3a to 4.3d the area for the frequency ranges of 2.25 <ω < 2.5s-1 is observed to
remain constant for the whole voltage range V0( =−+V to V)1000 .
Table 4.2c: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 500V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.09 0.87 0.54 0.37 0.31 +0.4 1.60 1.27 0.79 0.54 0.45 +0.2 1.73 1.38 0.86 0.58 0.49
0 1.84 1.47 0.91 0.61 0.52 -0.4 2.00 1.61 0.99 0.67 0.56 -1 2.17 1.76 1.07 0.72 0.61 -2 2.38 1.94 1.17 0.79 0.66
Figure 4.3c: Natural frequency vs axial load and tip mass for b1 = 0 and V = 500V
A closer look at the frequencies curves also indicates that the frequencies decrease when an
incremental voltage input to the piezo actuators is applied. Taking η = 10, k = +0.8 and
V0=−+V as our reference point and observe the frequency ranges along the tip mass ratio axis
as η → 0, it is noted that the shaded areas covered by the lower frequency ranges increase as
the input voltage is varied incrementally from V0=−+V to V1000 . At V0=−
+V the red area
covers 2.5 units from the reference point along the tip mass ratio axis, see Figures 4.3a to
4.3d, it is 3 units, 3.5 units and 6 units for a voltage input of 100V, 500V and 1000V,
Axial Load
Ratio

110
respectively. Along the axial load ratio axis it is noted that as k → 0 the area that represents
the lowest frequency range remains constant for V100 V,0=−+V and V500 , with a slight
increase at maximum voltage input )V1000( =−+V
This means that the lower frequency ranges increase and overlap the higher frequencies and
the overall results is that the system settles at lower frequencies when the voltage is
increased. The biggest changes occur at maximum input voltage )V1000( =−+V . For
example, in Figure 4.3a, the frequency range 0.5 < ω < 0.75s-1 starts at η ≈ 2.5 and ends at
η ≈ 4.5. This effect is produce by a combination of an axial load and tip mass only because
the induced voltage is zero. In Figure 4.3d, this range of frequency occurs along the tip mass
ratio axis between η ≈ 0.1 and η ≈ 0.
Table 4.2d: 1st Frequency of a beam with a tip mass (b1 = 0) and rotary inertia at 1000V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 0.66 0.52 0.33 0.22 0.19 +0.4 1.53 1.21 0.75 0.51 0.33 +0.2 1.68 1.33 0.83 0.56 0.47
0 1.79 1.43 0.88 0.60 0.50 -0.4 1.97 1.58 0.97 0.65 0.55 -1 2.15 1.74 1.06 0.71 0.60 -2 2.37 1.92 1.16 0.78 0.66
Figure 4.3d: Natural frequency vs axial load and tip mass for b1 = 0 and V =1000V
Axial Load
Ratio

111
This goes further to show that an active piezo actuator, when V > 0V, has an attenuating
effect on the natural frequencies of the system. At maximum input voltage )V1000( =−+V as
η → 10 and k → 1 (critical buckling) the lowest frequency range is 0 < ω < 0.25s-1.
4.3.2 Natural frequencies of a beam with extended tip mass and
rotary inertia for b1 = L/2
When the moment arm is extended such that b1 equals half the length of the beam (L) and
rotary inertia is taken into account, there are changes in the natural frequencies of the beam.
Tables 4.3a to 4.4d and Figures 4.4a to 4.5d show the natural frequencies of the beam for
b1 > 0.
Table 4.3a: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at 0V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.25 0.93 0.56 0.38 0.32 +0.4 1.66 1.23 0.74 0.50 0.42 +0.2 1.78 1.31 0.79 0.53 0.45
0 1.88 1.39 0.83 0.56 0.47 -0.4 2.03 1.50 0.90 0.60 0.51 -1 2.19 1.64 0.97 0.65 0.55 -2 2.40 1.79 1.06 0.71 0.60
Figure 4.4a: Natural frequency vs axial load and tip mass for b1 = L/2 and V = 0V
Axial Load
Ratio

112
The lowest natural frequency occurs at η = 10 and k = +0.8 in the range of 0.25 < ω < 0.5s-1
when the voltage input to the piezo actuators is V0=−+V to V500 . At maximum voltage input
)V1000( =−+V the frequency range drops to 0 < ω < 0.25s-1. This indicates that there is
some degree of controllability of the vibrations at maximum input voltage regardless of the
size of the moment arm (0 ≤ b1 ≤ L).
Table 4.3b: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at
100V. Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.24 0.91 0.55 0.37 0.31 +0.4 1.65 1.22 0.73 0.49 0.41 +0.2 1.77 1.31 0.78 0.53 0.44
0 1.87 1.38 0.83 0.56 0.47 -0.4 2.02 1.50 0.89 0.60 0.50 -1 2.19 1.63 0.97 0.65 0.55 -2 2.30 1.79 1.05 0.71 0.60
Figure 4.4b: Natural frequency vs axial load and tip mass for b1 = L/2 and V =100V
In the previous section, for b1 = 0, it was noted that there is an increase in the area or range
(0.25 < ω < 0.5s-1) occupied by the lowest natural frequencies and also that inducing a
voltage in the piezo actuators increases this area, indicating that the frequencies of the system
are reduced for a compressive axial load ratio, a larger tip mass and moment arm
Axial Load
Ratio

113
combination. The same phenomenon occurs for b1 > 0, but the initial areas (when the
actuators are inactive or active) for the lowest range frequencies are different.
Table 4.3c: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at
500V. Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.09 0.80 0.48 0.32 0.27 +0.4 1.60 1.17 0.71 0.48 0.40 +0.2 1.73 1.27 0.76 0.51 0.43
0 1.84 1.35 0.81 0.54 0.46 -0.4 2.00 1.48 0.88 0.59 0.50 -1 2.17 1.61 0.96 0.64 0.54 -2 2.38 1.78 1.05 0.70 0.59
Figure 4.4c: Natural frequency vs axial load and tip mass for b1 = L/2 and V =500V
The area is proportional to the voltage input (Voltage α Area). The area of the lower
frequencies for b1 = 0 (Figure 4.3a) is smaller than the area covered when b1 = L/2,
Figure 4.4a and b1 = L/1, Figure 4.5a, indicating that as the moment arm is increased the
natural frequencies of the beam decrease. These natural frequencies can be further reduced at
maximum voltage input to the piezo actuators to a range 0 < ω < 0.25 s-1. When the piezo
input voltage is zero, Figure 4.3a, 4.4a and 4.5a show an increase in the area of lowest
frequency. This also shows that the moment arm has a significant effect on the frequencies.
Axial Load
Ratio

114
Table 4.3d: 1st Frequency of a beam with a tip mass (b1 = L/2) and rotary inertia at
1000V. Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 0.66 0.48 0.29 0.20 0.16 +0.4 1.53 1.11 0.67 0.45 0.38 +0.2 1.68 1.23 0.74 0.50 0.42
0 1.79 1.32 0.79 0.53 0.45 -0.4 1.97 1.45 0.86 0.58 0.49 -1 2.15 1.59 0.94 0.63 0.53 -2 2.37 1.76 1.04 0.70 0.59
Figure 4.4d: Natural frequency vs axial load and tip mass for b1 = L/2 and V =1000V
4.3.3 Natural frequencies of a beam with extended tip mass and
rotary inertia for b1 = L/1
From the data above it is evident that the natural frequencies of the beam can be altered using
a piezo actuator and that maximum control can be attained at maximum voltage
)V1000( =−+V . In Figure 4.3a to 4.3d it is noted that the increase in area in red
(0.25 < ω < 0.5 s-1) is along the tip mass ratio axis (η) for b1 = 0. When b1 > 0 the increase is
more pronounced along the axial load ratio axis (k) compared to the case of b1 = 0, see
Figures 4.4a to 4.5d. The red area increases as the moment arm increase and drop further into
the blue zone were the frequency range is 0 < ω < 0.25 s-1.
Axial Load
Ratio

115
Table 4.4a: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at 0V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.25 0.85 0.50 0.34 0.28 +0.4 1.66 1.12 0.66 0.44 0.37 +0.2 1.78 1.20 0.70 0.47 0.40
0 1.88 1.26 0.74 0.50 0.42 -0.4 2.03 1.37 0.80 0.53 0.45 -1 2.19 1.48 0.86 0.58 0.49 -2 2.40 1.62 0.94 0.63 0.53
Figure 4.5a: Natural frequency vs axial load and tip mass for b1 = L//1 and V = 0V
Figure 4.3a shows the natural frequencies for a beam with inactive piezo layers )V0( =−+V .
Along the axial load ratio axis it is noted that the limit were the area of lowest natural
frequencies is at k = +0.2. As we increase the voltage input to the piezo layers it is also noted
that the limit changes, Figures 4.3b to 4.3d, to k = +0.2, k = +0.1, k = -0.4 for voltage inputs
of, V100=−+V , V500=−
+V , V1000=−+V along η = 10; respectively. It is observed that the
largest deviation, when compared to an inactive beam occurs at maximum voltage input. It
can be concluded that by increasing the voltage input, the number of natural frequencies
occurring in the lowest range can be increased and therefore the vibration characteristics of
the system changed.
Axial Load
Ratio

116
Table 4.4b: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at
100V. Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.24 0.83 0.49 0.33 0.28 +0.4 1.65 1.11 0.65 0.44 0.37 +0.2 1.77 1.19 0.70 0.47 0.39
0 1.87 1.26 0.73 0.49 0.41 -0.4 2.02 1.36 0.79 0.53 0.45 -1 2.19 1.48 0.86 0.58 0.48 -2 2.39 1.62 0.93 0.63 0.53
Figure 4.5b: Natural frequency vs axial load and tip mass for b1 = L//1 and V =100V
At maximum voltage input for a concentrated load ( V1000=−+V and b1 = 0) the limit of the
area of lowest frequencies (0.25 < ω < 0.5s-1) is k = 0 along the axial load ratio axis, see
Figure 4.3a to 4.5d. From Figure 4.4d and 4.5d it is noted that the outer limit of the area
increases as the moment arm increases along the axial load axis, the lower frequency zone
increases from k = -0.4 and k = -1.5 for b1 = L/2 and b1 = L/1, respectively. By increasing the
moment arm more area is captured and thereby attenuates the natural frequencies. The
addition of an input voltage adds an additional decrease as discussed earlier.
Tables 4.2a to 4.4d show the natural frequencies of the system with all the parameters taken
into account.
Axial Load
Ratio

117
Table 4.4c: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at
500V.
Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.09 0.73 0.43 0.29 0.24 +0.4 1.60 1.07 0.63 0.42 0.35 +0.2 1.73 1.16 0.68 0.46 0.38
0 1.84 1.23 0.72 0.48 0.41 -0.4 2.00 1.34 0.78 0.52 0.44 -1 2.17 1.46 0.85 0.57 0.48 -2 2.38 1.61 0.93 0.62 0.52
Figure 4.5c: Natural frequency vs axial load and tip mass for b1 = L//1 and V = 500V
At b1 = 0, for an inactive beam )V0( =−+V the natural frequency is ω = 0.3614s-1 and at
maximum input voltage )V1000( =−+V the frequency is ω = 0.1855s-1, at b1 = L/2 the
frequency is ω = 0.3202s-1 for V0=−+V along with ω = 0.1643s-1 for V1000=−
+V and at
b1 = L/1 the frequency is ω = 0.2844s-1 for V0=−+V along with ω = 0.1460s-1 for
V1000=−+V , which represents a decrease of approximately 50% in the natural frequencies.
By keeping the input voltage constant and varying the moment arm, the decrease calculated
from the data is approximately 11%. This goes to indicate that the piezo electric actuators
have a significant effect on the vibrations.
Axial Load
Ratio

118
Table 4.4d: 1st Frequency of a beam with a tip mass (b1 = L/1) and rotary inertia at
1000V. Axial load Ratio (k)
η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 0.66 0.44 0.26 0.18 0.15 +0.4 1.53 1.02 0.60 0.40 0.34 +0.2 1.68 1.12 0.66 0.44 0.37
0 1.79 1.20 0.70 0.47 0.40 -0.4 1.97 1.32 0.77 0.51 0.43 -1 2.15 1.44 0.84 0.56 0.47 -2 2.37 1.59 0.92 0.62 0.52
Figure 4.5d: Natural frequency vs axial load and tip mass for b1 = L/1 and V =1000V
Axial Load
Ratio

119
Chapter 5 – Effect of actuator thickness and voltage polarity on the frequencies
5.1 Fundamental frequencies for a beam with different actuator
thicknesses
So far in the investigation it has been shown that the frequencies of vibration for a
cantilevered beam with a tip mass and axial load can be modified with the use of piezo
electric actuators. The above investigation was based on the piezo actuators with a thickness
of one millimeter (h1 = h2 = 1mm). With a thickness of 1mm we showed that the piezo
actuators were effective within a range of axial load ratio (+0.8 < k < -2) and tip mass ratio
(0 < η < 5). According to the literature on piezo actuators it is reasonable to limit the voltage
input to V1000=−+V per millimeter to prevent the saturation of the piezo material. In this
section the effectiveness of the piezo actuators is investigated when the piezo thickness is
increased to 2mm and the input voltage is also increased to V2000=−+V , while keeping the
overall thickness of the composite the same; that is the thickness of the composite is limited
to 12mm. For the 2mm piezo layer thickness (h1 = h2 = 2mm) the overall thickness of the
piezoelectric beam is maintained and therefore the beam thickness is reduced 8mm.
In the earlier sections of this investigation, it is noted that the piezo actuator has an
insignificant or zero effect on the higher natural frequencies (ωn - for n > 1) of the beam; and
therefore the subsequent investigation focuses on the most relevant mode of vibration, which
is the fundamental mode (1st natural frequency). Figure 5.1 shows the plot the of the
1st natural frequency (ω1) vs. the axial load (k) for different input voltages V1000 V,0( =−+V
and V)2000 , where 1000V is applied to the beam with 1mm piezo layers at the top and
bottom of the beam and 2000V applied to the beam with 2mm piezo layers at the top and
bottom.
It was observed earlier, in Section 3.5, that the piezo actuators are ineffective in controlling
the fundamental frequency beyond a particular axial load ratio (k < -2). In the plot of
Figure 5.1, the tip mass ratio is kept constant (η = 0) and both the axial load ratio and the
voltage are varied. For an axial load k ≤ -2 the differences in the fundamental modes are

120
minimal. The largest difference in the frequencies occurs at near critical load when the axial
load ratio is k = +0.8.
Figure 5.1: 1st Natural frequency vs axial load for different voltages (b1 = 0)
At k = -2, the natural frequencies are; 2.3972s-1 for an uncontrolled beam )V0( =−+V ,
2.3716s-1 for a controlled with beam, V1000=−+V and 2.3442s-1 for a controlled beam
with V2000=−+V . The percentage difference at V0=−
+V and V1000=−+V is 1.068% and for
V0=−+V and V2000=−
+V is 2.211%. At k = +0.8 it is noted that there is a large difference
between uncontrolled beam and controlled beam, where the frequency of the uncontrolled
beam )V0( =−+V is 1.2742s-1 and for the controlled beam )V1000( =−
+V is 0.6597s-1. When
the voltage is V2000=−+V the beam buckles and there are zero vibrations in the beam. The
percentage difference at V0=−+V and V1000=−
+V is 44.71% and for V0=−+V and
V2000=−+V is 100%.
Again, an observation of Figure 5.1 shows that the natural frequency the system when
k = +0.8 and the input voltage is V2000=−+V is zero. By applying an increasing axially
compressive load on the beam, the beam buckles. When this occurs, the frequency of
vibration approaches zero in the limit (ω1 → 0). In this case the axial load is limited,
N = +0.8Pcr, where Pcr is the critical buckling load of the beam.

121
Therefore by applying V2000=−+V to the piezo actuators, the system goes into buckling,
hence the frequency of zero in this case. This buckling load can be determined by setting the
frequency parameter (a4) in the characteristic equation (equation 2.86) to zero and the axial
load parameter (β) becomes an unknown which can be used to determine the critical buckling
load for the system (Bokaian, 1988). This buckling phenomenon is referred to as divergence
and it occurs when the frequency is zero (Abedinnasab et al., 2011).
To further study the fundamental frequencies of the system for a beam with h1 = h2 = 2mm
piezo thickness and induced voltage V2000=−+V , the axial load ratio is kept constant (k = 0).
Table 5.1 lists the natural frequencies for a beam without any rotary inertia (L = 0) with a
control voltage of V1000 V,0=−+V and V2000 ; and the frequencies of a beam including the
rotary effects due to inertia (L = 0.146mm) at the tip. The left hand side of Table 5.1 shows
the frequencies without rotary inertia and the right hand side is the frequencies including
rotary inertia. Both sets of frequencies in Table 5.1 are for a concentrated mass is at tip and
the moment arm b1 = 0.
Table 5.1: Fundamental frequency of a beam with tip mass (b1 = 0), axial load (k = 0),
beam thickness (hb = 8mm) and top and bottom piezo (h1 = h2 = 2mm).
b1 = 0; L = 0; k = 0 (without rotary inertia) b1 = 0; L = 0.146; k = 0 (with rotary inertia)
Tip mass Ratio (η) V0=−
+V V1000=−+V V2000=−
+V Tip mass Ratio (η) V0=−
+V V1000=−+V V2000=−
+V
0 1.88 1.79 1.70 0 1.88 1.79 1.70 0.1 1.72 1.65 1.55 0.1 1.51 1.43 1.34 1 1.25 1.19 1.12 1 0.93 0.88 0.83 5 0.87 0.83 0.78 5 0.63 0.60 0.56 10 0.74 0.70 0.66 10 0.53 0.50 0.47
It is observed that the two parameters, tip mass ratio and induced voltage have the same
effects, i.e. an increase the tip mass or the induced voltage results in a decrease in the natural
frequencies. The highest frequencies occur when the tip mass ratio is zero (η = 0,
ω1 = 1.8751) and the voltage is zero ( V0=−+V ) and then decreases to (ω1 = 0.4722) when the
tip mass ratio and the voltage are maximum; η = 10 and V2000=−+V . This represents a
percentage change (decrease) of 74.82% from an unloaded and uncontrolled beam to a
maximum loaded and controlled beam. If the tip mass ratio is zero (η = 0) and the tip mass
ratio is maximum (η = 10) the percentage difference is 60.76% and when the tip mass ratio is

122
minimal (η = 0) and the voltage is zero )V( V0=−
+ and maximum voltage )V2000( =−+V , the
percentage difference is 9.49%. This indicates that the tip mass has a dominant effect on the
frequencies as the mass increases and more influence than the induced voltage. This cut-off
point can be found when the tip mass is η > 1, at which point the percentage change levels
off, for a beam without inertia and a beam with inertia, see Table 5.1.
As expected, in Figure 5.1 and Table 5.2, the frequencies at zero tip mass (η = 0) at the
different voltages ( V1000 V,0=−+V and V)2000 correspond regardless of whether inertia is
taken into account or not for any value of the moment arm (b1). At a voltage of:
V1000 V,0=−+V and V2000 , the frequencies are: ω1 = 1.8751s-1, 1.7945s-1 and 1.6972s-1.
Table 5.2: Fundamental frequency of a beam with tip mass (b1 > 0), axial load (k = 0),
beam thickness (hb = 8mm) and top and bottom piezo (h1 = h2 = 2mm).
b1 = L/2; L = 0.146; k = 0 (with rotary inertia)
b1 = L/1; L = 0.146; k = 0 (with rotary inertia)
Tip mass Ratio (η) V0=−
+V V1000=−+V V2000=−
+V Tip mass Ratio (η) V0=−
+V V1000=−+V V2000=−
+V
0 1.88 1.79 1.70 0 1.88 1.79 1.70 0.1 1.39 1.32 1.24 0.1 1.26 1.20 1.12 1 0.83 0.79 0.74 1 0.74 0.70 0.66 5 0.56 0.53 0.50 5 0.50 0.47 0.44 10 0.47 0.45 0.42 10 0.42 0.40 0.37
This is totally in accordance to our expectation because if the tip mass ratio is zero (η = 0),
the moment arm (b1) can be any value and results are the same. Table 5.1 and 5.2 shows that
the frequencies decrease as the tip mass ratio and the voltage increase and also that the
gradient of the curves is very steep when 0 < η < 1. This shows that there is a bigger change
in frequency for a change in tip mass ratio. The gradient of the curves is much smaller when
the tip mass ratio η > 1, meaning that a much larger change in the axial load ratio and the
voltage only has a small effect on the natural frequencies. From Table 5.1 and 5.2 the
percentage difference of the frequencies for b1 = L/2 and b1 = L/1 can be calculated. For the
moment arm b1 = L/2 and b1 = L/1 at a voltage of V0=−+V and V1000 , the difference is
≈ 5 %, and for the moment arm b1 = L/2 and b1 = L/1 at a voltage of V0=−+V and V2000 the
difference is ≈ 10%. The difference between the curves tends to become constant as the tip
mass ratio increases. From the above data it is concluded that if the thickness of the piezo
layer and the input voltage are increased, the natural frequencies decreases even further.

123
5.2 Effect of voltage polarity on frequencies
5.2.1 Increase in the fundamental frequency
If the polarity of the voltage input to the piezoelectric beam are selected according to
Table 2.2; such that, the system undergoes a tensile load due to strain induced by the piezo
actuator, the natural frequencies increase. Table 5.3 shows the natural frequencies of an
uncontrolled beam whilst Table 5.4 and 5.5 shows the frequencies of a controlled beam. The
controlled frequencies show a higher difference in the first mode of vibration but only a slight
difference in the second, third and fourth mode as in the discussed in Chapter 3. The piezo
actuators do not have a notable effect on the second and higher modes of vibration of the
system. The zeroth eigenvalue (ω0) or characteristic value for the frequency equation is
trivial, ω0 = 0 and therefore the tables indicate the fundamental frequency.
The fundamental frequency is increased when a voltage is applied and the values for the
increase are shown in Table 5.4 and 5.5. The fundamental frequency can be increased by
approximately 17% at maximum compressive load (k = +0.8) for varying tip mass ratio as
indicated in Table 5.6. The difference in frequency gap increases as the tip mass ratio
increases and levels off for η ≥ 5. In Section 3.2 the investigation uncovered the fact that the
natural frequencies for tip mass ratio η = 5 and η = 10 are only slightly different in the first
mode and almost identical in the higher modes.
In Table 5.5 the natural frequencies of a controlled beam are listed for an input voltage of
V2000=+−V . In Section 5.1 above the overall thickness of the bottom and top piezo
actuators was increased from 1mm to 2mm which allowed us to increase to input voltage.
These frequencies are higher compared to the frequencies for an uncontrolled beam and for a
controlled beam at V1000=+−V . The effects on the second natural frequencies due to an
increase in the voltage are insignificant. When applying an increased voltage the fundamental
frequencies can be further increased up to approximately 28% for compressive loads. That
represents an increase of about 10% from an input voltage of V1000=+−V at k = +0.8 for tip
mass ratio η ≤ 10.

124
Table 5.3: Fundamental frequencies for uncontrolled beam V0=−+V .
Voltage = 0V (ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 1.27 1.17 0.84 0.58 0.49 0.4 1.66 1.52 1.10 0.77 0.65 0 1.88 1.72 1.25 0.87 0.74 -1 2.19 2.03 1.48 1.03 0.87 -6 2.87 2.68 1.99 1.40 1.18 -10 3.15 2.96 2.22 1.56 1.32
Table 5.4: Fundamental frequencies for controlled beam V1000=+
−V .
Voltage = -1000V (ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
0.8 1.49 1.37 0.99 0.69 0.58 0.4 1.77 1.62 1.18 0.82 0.69 0 1.95 1.79 1.30 0.91 0.77 -1 2.23 2.06 1.51 1.05 0.89 -6 2.87 2.69 2.00 1.40 1.19 -10 3.15 2.96 2.22 1.56 1.32
Table 5.5: Fundamental frequencies for controlled beam V2000=+
−V .
Voltage = -2000V (ω1)
Axial load ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
0.8 1.63 1.50 1.08 0.76 0.64 0.4 1.85 1.70 1.24 0.86 0.73 0 2.00 1.85 1.34 0.94 0.79 -1 2.26 2.10 1.54 1.07 0.91 -6 2.88 2.70 2.01 1.41 1.19 -10 3.16 2.97 2.23 1.57 1.33
Table 5.7 shows that the increase in the fundamental frequency becomes smaller as the beam
is subjected to a tensile load and insignificant beyond k = -1. Using piezo actuators the
fundamental frequencies of the system can be increase to make room for a larger range of
external excitation frequencies.

125
Table 5.6: Percentage change in fundamental frequency between uncontrolled V0=−+V
and controlled beam V1000=+−V .
Percentage change in fundamental frequency
( ) ( )( ) 100
V01
V01V10001 ×−
ωωω
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 17.22 17.42 17.78 17.83 17.85 0.4 6.34 6.55 6.78 6.90 6.89 0 3.74 3.92 4.17 4.22 4.25 -1 1.70 1.84 2.08 2.15 2.16 -6 0.32 0.39 0.55 0.57 0.58 -10 0.16 0.20 0.32 0.31 0.35
Table 5.7: Percentage change in fundamental frequency between uncontrolled
V0=−+V and controlled beam V2000=+
−V .
Percentage change in fundamental frequency
( ) ( )( ) 100
V01
V01V20001 ×−
ωωω
.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 28.18 28.63 29.36 29.50 29.54 0.4 11.30 11.70 12.23 12.41 12.41 0 6.86 7.21 7.72 7.83 7.88 -1 3.20 3.47 3.94 4.06 4.06 -6 0.61 0.75 1.05 1.10 1.11 -10 0.31 0.40 0.62 0.65 0.69
5.2.2 Increase in frequency gap between the fundamental and
second natural frequency
In Section 2.4 a characteristic equation was developed to give the eigenvalues or natural
frequencies. The characteristic values of equation 2.86 are dependent on axial load, tip mass,
elastic column and the piezo actuators. The actuation due to the piezo layers is further
dependent on material properties, input voltage magnitude, voltage polarity shown in
Table 2.2 and the geometric properties (layer thickness, etc.). In this section the polarity of
the input voltage is investigated with the view to widen the frequency gap between zero and
the fundamental frequency (ω0 and ω1) and also between the fundamental frequency and the
second natural frequency (ω1 and ω2).

126
Table 5.8a: 1st frequencies for uncontrolled
beam V0=−+V
Voltage = 0V (ω1) (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 1.27 1.17 0.84 0.58 0.49 0.4 1.66 1.52 1.10 0.77 0.65 0 1.88 1.72 1.25 0.87 0.74 -1 2.19 2.03 1.48 1.03 0.87 -6 2.87 2.68 1.99 1.40 1.18
-10 3.15 2.96 2.22 1.56 1.32
Table 5.8b: Reduced 1st frequencies for
controlled beam V1000=+−V
Voltage = 1000V (ω1) (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 0.66 0.73 0.53 0.37 0.31 0.4 1.54 1.41 1.02 0.71 0.60 0 1.79 1.65 1.19 0.83 0.70 -1 2.15 1.99 1.45 1.01 0.85 -6 2.86 2.67 1.98 1.39 1.18
-10 3.14 2.95 2.21 1.55 1.31
Table 5.8c: Reduced 1st frequencies for
controlled beam V2000=+−V
Voltage = 2000V (ω1)
(k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 ** ** ** ** ** 0.4 1.34 1.22 0.88 0.61 0.52 0 1.70 1.55 1.12 0.78 0.66 -1 2.11 1.94 1.41 0.98 0.83 -6 2.85 2.66 1.97 1.38 1.17
-10 3.14 2.94 2.20 1.54 1.31 **-- indicates zero frequency due to buckling.
Table 5.9b: 2nd frequencies for uncontrolled
beam V0=−+V
Voltage = 0V (ω2) (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 4.53 4.26 3.93 3.85 3.84 0.4 4.62 4.33 3.98 3.90 3.89 0 4.69 4.40 4.03 3.95 3.94 -1 4.88 4.56 4.15 4.06 4.05 -6 5.55 5.17 4.64 4.52 4.51
-10 5.92 5.52 4.94 4.81 4.79
Table 5.9a: Reduced 2nd frequencies for
controlled beam V1000=+−V
Voltage = 1000V (ω2) (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 4.51 4.25 3.92 3.85 3.84 0.4 4.60 4.32 3.98 3.90 3.89 0 4.68 4.39 4.03 3.95 3.94 -1 4.86 4.55 4.15 4.06 4.05 -6 5.54 5.16 4.64 4.52 4.51
-10 5.92 5.52 4.94 4.81 4.79
Table 5.9b: Reduced 2nd frequencies for
controlled beam V2000=+−V
Voltage = 2000V (ω2) (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 4.49 4.24 3.92 3.85 3.84 0.4 4.58 4.31 3.97 3.90 3.89 0 4.66 4.38 4.03 3.95 3.94 -1 4.85 4.54 4.15 4.06 4.05 -6 5.53 5.15 4.64 4.52 4.51
-10 5.91 5.51 4.93 4.80 4.79
The effects of a varying voltage were established in Section 3.2. Tables 5.8a to 5.8c and
Tables 5.9a to 5.9c show the first and second natural frequencies for an uncontrolled and
controlled piezoelectric beam. It was noted in Section 3.3, Table 3.5d, that there is a
maximum reduction in the fundamental frequency of 44% at zero tip mass ratio (η = 0) and
maximum compressive load (k = +0.8). The reduction at maximum compressive axial load
ratio remains high at 37% as the tip mass ratio is varied to η = 10. At zero axial load (k = 0)
the reduction is approximately 4% for all cases in the fundamental mode. When an
increasing tensile load is applied the difference decreases dramatically to less than 0.5%. In

127
the second and higher modes of vibration the maximim difference is less that 0.5% and
therefore negligible.
Table 5.10: Difference between 1st and 2nd reduced frequencies for uncontrolled
beam V0=−+V
Voltage = 0V (ω2 - ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 3.26 3.10 3.09 3.27 3.35 0.4 2.95 2.81 2.88 3.13 3.24 0 2.82 2.68 2.78 3.08 3.20 -1 2.68 2.53 2.68 3.03 3.18 -6 2.68 2.49 2.65 3.13 3.32
-10 2.78 2.57 2.72 3.25 3.47
Table 5.11: Difference between 1st and 2nd reduced frequencies for controlled
beam V1000=+−V
Voltage = 1000V (ω2 - ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 3.85 3.52 3.40 3.48 3.53 0.4 3.06 2.91 2.96 3.19 3.29 0 2.88 2.74 2.84 3.12 3.23 -1 2.71 2.56 2.70 3.05 3.20 -6 2.68 2.49 2.66 3.13 3.33
-10 2.77 2.57 2.73 3.25 3.47
Table 5.12: Difference between 1st and 2nd reduced frequencies for controlled
beam V2000=+−V
Voltage = 2000V (ω2 - ω1) Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 *** *** *** *** *** 0.4 3.24 3.09 3.10 3.29 3.37 0 2.96 2.82 2.91 3.17 3.28 -1 2.74 2.59 2.74 3.08 3.22 -6 2.68 2.49 2.67 3.14 3.34
-10 2.77 2.57 2.73 3.26 3.48 ***-- the difference cannot be expressed due to buckling of beam.
The frequency gap between the first and the second natural frequency is important in the
design of structures. A mechanical structure has natural frequencies that are determined from
the geometric and material properties. If these properties are unchanged the resonant
frequencies remain unchanged and an external applied excitation frequency should fall within

128
this band of frequencies to prevent resonance. Tables 5.10 to 5.12 show the frequency gap
between the first and the second natural frequency for an uncontrolled beam and a controlled
beam. The frequency gap is significantly large for a compressive axial load and is reduced
when a tensile load is applied. From the above discussion it is concluded that the difference
is mainly due to the decrease if the fundamental frequency because the decrease in the second
frequencies due to piezoelectric layers is negligible. A larger frequency gap is preferred in
the design of mechanical structures because a larger band of excitation frequencies can be
accommodated by the structure before it reaches resonance.
Table 5.13: Percentage change in frequency gap between uncontrolled V0=−+V and
controlled beam V1000=+−V .
Change in frequency gap for 1st and 2nd frequency. ( ) ( )
( ) 100V01
V100012V012 ×−−−
ωωωωω
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10 0.8 18.33 13.59 10.02 6.63 5.49
0.4 3.59 3.71 2.89 1.90 1.55 0 2.32 2.26 1.86 1.23 1.01 -1 1.01 1.09 1.02 0.68 0.55 -6 0.03 0.12 0.29 0.21 0.18 -10 0.04 0.04 0.17 0.18 0.12
Table 5.14: Percentage difference in frequency gap between uncontrolled V0=−+V and
controlled beam V2000=+−V .
Change in frequency gap for 1st and 2nd frequency. ( ) ( )
( ) 100V01
V200012V012 ×−−−
ωωωωω
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η =10
0.8 *** *** *** *** *** 0.4 9.80 9.94 7.58 4.95 4.05 0 5.13 5.46 4.41 2.89 2.37 -1 2.06 2.48 2.30 1.53 1.24 -6 0.07 0.32 0.64 0.47 0.40 -10 0.06 0.08 0.40 0.34 0.26
***-- the percentage cannot be expressed due to buckling of beam.
The percentage difference between the frequency gap for an uncontrolled and controlled
beam is highest for a compressive load ratio of k = +0.8 indicating that the system is most
sensitve to the piezo actuators in compression. The percentage difference drops off as the tip
mass ratio is increased because the higher mode frequencies converge rapidly to those of a

129
clamped pinned beam as the tip mass ratio increases (η → ∞). The maximum increase in the
gap is 18% whilst the minimum increase is 5% at compressive load. As the axial load
changes to tension the difference decreases in a rapid fashion indicating that the piezo
actuator loses its efficacy. In tensile load the fundamental frequencies decrease sharply
within the axial load ratio range mentioned above in Table 5.13 and 5.14; and less so in the
second frequencies. The percentage change in frequency gap for 1st and 2nd frequency
becomes smaller and the piezo loses its effectiveness leading to the controlled beam
resembling the uncontrolled beam.
In Table 5.8c when a compressive load of k = +0.8 and the control voltage input is increased
to V2000=−+V the beam undergoes buckling and therefore experiences no vibrations. The
results at k = +0.8 for an input voltage of V2000=−+V will not be analyzed further due to the
buckling phenomenon. When the axial load ratio is k = +0.4 and a voltage of V2000=−+V is
applied buckling can be avoided. At k = +0.4 the change in the frequency gap is 9.80%
compared to 3.59% for V2000=−+V and V1000=−
+V , respectively. It is noted in Tables 5.13
and 5.14 that the frequency gap between the first and the second frequencies can be doubled
by increasing the voltage to V2000=−+V . When the tensile axial load is applied and k ≤ -1
the change in the frequency gap is approximately 2% and therefore insignificant.

130
Chapter 6 – Mode shapes of vibrating piezoelectric beam
6.1 First mode shapes for a beam with a concentrated tip mass
The deflection profiles of the beam in free vibration can be determined from the general
solution, equation 2.62. Using the boundary conditions at the fixed end, the two constants An
and Dn can be eliminated and the general solution is expressed in equation 6.1 in terms of two
constants. The constants Cn and Bn are obtained from satisfying the boundary conditions at the
free end.
( )xpxpBxpppxpCxX nnnn
n
nnnn 122
2
11 coshcossinsinh)( −+
−= ……….. (6.1)
After inserting the general solution into equation 4.1 and equation 4.2, the two equations
below can be computed in terms of the remaining two constants where, for a concentrated
mass b1 = 0 and equation 4.18 and 4.19 reduce to equation 6.2 and 6.3 below.
( ) ( )[ ]( ) ( )
−++
−++⋅+=
LpCpLpCppp
LpCpLpCpBC
nAnnAnn
n
nAnnAnnn
1212
22
2
1
1212
22
sinhsin
coshcos…………..... (6.2)
and,
( ) ( )
( ) ( )
−++−−
−+++−
−=Lp
pLp
paLpp
ppLpp
Lpp
Lpp
aLppLpp
ppCB
nn
nn
nnnn
nnn
nn
nn
nnnnn
n
nnn
12
22
41
221
2
12
222
22
11
41
2212
222
2
1
cosh1cos1sinhsin
sin1sinh1coshcos
ηββ
ηββ
…. (6.3)
By inserting Cn from equation 6.2 into equation 6.1 and 6.3 a general solution is obtained in
terms of Bn alone; and therefore Bn can set to unity or any arbitrary constant. Below are the
curves of the shape functions for a beam with tip mass, axial load and a voltage applied to the
piezo actuator layers.

131
To investigate the tip deflection as the tip mass ratio is varied incrementally, hold the axial
load constant (k = 0) and plot the first mode of vibration for incremental varying tip mass
ratio’s. In Section 3.4 the effect of tip mass on the natural frequencies was investigated and a
conclusion was reached that as the tip mass increases the natural frequencies decrease, this
can be observed in Figure 3.6a to 3.9d. It is also observed in Figure 3.1a to 3.4d that a
compressive axial load decreases the natural frequencies, whilst a tensile axial load will
increase the natural frequencies; see Table 3.1a to 3.4d. The same conclusion can be drawn
for all the modes of vibration from the data in the above mentioned tables and figures for a
concentrated tip mass, where the center of gravity of the mass coincides with the tip of the
beam at x = 0.146m.
Figure 6.1: 1st Mode shape of vibration with inactive piezo actuators for Voltage = 0V
Figure 6.1 illustrates the 1st mode shapes of vibration for the system with zero input voltage
)V0( =−+V to the piezo actuators and zero axial load (k = 0). Figure 6.2 illustrates the 1st
mode of vibration with maximum input voltage )V1000( =−+V and an axial load ratio of zero
(k = 0). In both figures it is observed that the transverse displacement of the tip is smallest

132
when the tip mass ratio is maximum (η = 10). As the tip mass ratio is decreased, there is an
increment in tip deflection and the maximum deflection occurs at zero tip mass ratio (η = 0).
Figure 6.2: 1st Mode shape of vibration with active piezo actuators for Voltage = 1000V
In previous discussions about the relation between the natural frequencies and the tip mass it
was concluded that as the tip mass ratio is increased, the natural frequencies of the system
decrease. From the above figures, Figure 6.1 and 6.2, it is observed that as the tip mass ratio
is increased, the tip deflection decreases. From this observation, it can be further asserted
that as the natural frequency if the system decreases the tip deflection of the beam decreases
accordingly. The curves in Figure 6.1 and 6.2 show a uniform change in the tip deflection as
the tip mass changes. To verify the 1st mode shapes the first four first mode shapes: 1st, 2nd,
3rd and 4th mode shapes are plotted and compared to those attained in
Balachandran et al., (2009). For the 1st mode it is not clear if the shape is the identical to that
obtained by Balachandran et al., (2009) since the nature of the problem does not allow us to
determine all the four constants (An, Bn, Cn and Dn) in the general solution of
equation 2.62 and 6.1. The amplitude of the vibration cannot be determined until a time
dependent initial conditions of the system is specified. The 2nd, 3rd and 4th mode shapes are
plotted in the Appendix C1 and C2. The roots of the mode shapes in the higher modes of
vibration are identical to those obtained by Balachandran et al., (2009), and so it follows that
when the input voltage is set to zero V)0( =−
+V , zero axial load ratio (k = 0) the 1st vibration
mode shape should be similar to that attained in Balachandran et al., (2009).

133
Figure 6.2 shows the mode shape of an active beam with a maximum input voltage of 1000V.
There are slight changes in the mode shape and the tip deflection but these are not apparent
because as mentioned earlier, the nature of the solution only gives us the shape of the mode
and not the amplitude. Nevertheless, it is observed that as the tip mass increases, the tip
displacement decreases, i.e. as η → ∞ the displacement w(L,t) → 0 and the system resembles
a clamped-hinged beam.
Figure 6.3: 1st Mode shape of vibration with inactive piezo actuators for Voltage = 0V
In Figure 6.3 and 6.4 the effect of the tip mass is eliminated by setting it to zero (η = 0) to
investigate the effect of the piezo actuators on the modes shape if the axial load ratio is
varied. Table 3.1a to 3.4d contains the natural frequencies for a beam with a tip mass and
concentrated load where our area of interest is the column for zero tip mass (η = 0).
Applying a compressive load (k = +0.8) on the column produces the smallest tip deflection as
observed in Figure 6.3 and when a tensile load (k ≤ 0) is applied, the tip deflection of the
vibration mode increases accordingly. From this data it is deduced that when a compressive
load is applied, the tip displacement of the mode is decreased and when a tensile load is
applied, the displacement increases for the vibration modes concerned.
In Section 3.2 it was noted that when the column is subjected to compressive load, the natural
frequencies decrease and that a tensile load increases the natural frequencies. From the
discussion on the tip mass above, Figure 6.1 and 6.2, it is also observed that as the natural

134
frequency decreases, so will the tip displacement of the mode of vibration, a finding which is
agreeable with Balachandran et al., (2009).
Figure 6.4: 1st Mode shape of vibration with active piezo actuators for Voltage =1000V
The data above suggest that as the natural frequency of the system decreases so will the
displacement of the tip for the mode of vibration. The opposite should also hold true i.e.
higher the natural frequency of the system, the higher the tip displacement of the mode of
vibration. This statement can be affirmed in Figure 6.3 and 6.4.
Figure 6.4 represents the mode shape for an active beam with maximum input
voltage )V1000( =−+V . It is observed from this figure that the largest change in tip
displacement occurs for the compressive load. From Section 3.3 it was found that the largest
change in natural frequency occurs at maximum compressive load (k = +0.8) and maximum
tip mass ratio (η = 10). Clearly, there are some changes in the tip displacement on the mode
shape when an input voltage is applied to the piezo actuators. It is observed that in all cases,
the tip displacement was diminished but the amplitude of vibration is not specified.

135
6.2 Mode shapes for a beam with an extended tip mass and rotary
inertia (b1 > 0)
The deflection profiles of the beam can be determined from the natural frequencies attained
in section 4.3 in addition to using equations 6.4, 6.5 and 6.6 below. Equations 6.5 and 6.6 are
obtain from the boundary conditions on the free end of the beam at x = L using the general
solution.
( )xpxpBxpppxpCxX nnnn
n
nnnn 122
2
11 coshcossinsinh)( −+
−= ............ (6.4)
where,
27262524232221
161514131211 )(nnnnnnn
nnnnnnnn CCCCCCC
CCCCCCBC+++++++++++−
= ………………………….. (6.5)
and,
also,
24232221
14131211 )(nnnn
nnnnnn BBBB
BBBBCB++++++−
= ………………………..…………….... (6.6)
and,

136
By inserting Cn, in equation 6.5, into equations 6.4 and 6.6 a general solution is obtained in
terms of Bn alone; and therefore Bn can be solved such that the tip displacement of the beam
is a non-dimensional constant equal to unity (1). According to Merovitch, (2001), the
amplitude of the mode shape cannot be determined uniquely but the shape form will be
unique.

137
Chapter 7 – Dynamic behaviour of a piezoelectric beam subject to initial conditions
7.1 Initial value problem and the eigenfunction expansion series
In Section 2.2 the differential equation governing the vibration of a beam with axial load and
tip mass were introduced. The boundary conditions for this particular configuration were
presented in Section 2.3. Equation 7.1 represents the Partial Differential Equation (PDE)
governing the vibration of the beam:
),(2
2
2
2
4
4
txftwA
xwN
xwIE cc =
∂∂
+∂∂
+∂∂ ρ ……….……..…..…………….. (7.1)
The different boundary conditions at the fixed end of the beam and the free end of the beam
are mentioned in Section 2.3. The boundary conditions were used to generate the
characteristic values that satisfy the boundary conditions. To determine the dynamic solution
to this problem, the sum of the eigenfunctions derived above are subjected to an initial
velocity of the beam of zero, v(x,0) = 0 and the tip displacement will be two units, w(L,0) = 2.
The sum of all the initial values of all the eigenfunctions is required to be 2 units. For this
partial differential equation a separable solution (equation 7.2) is assumed:
∑∞
=
=1
)()(),(n
nn tTxXtxw ………….………..……………….............….. (7.2)
Equation 7.2 is an eigenfunction expansion series of all the modes of vibration which
represents a complete solution of the problem. This solution is the sum of an infinite number
of eigenfunctions and is approximated with the first six eigenfunctions for the different
loading conditions. The first six eigenfunctions provide a satisfactory approximation with a
small residual error, which is investigated later in the study. In the space domain the solution
is:
( )xpxpBxpppxpCxX nnnn
n
nnnn 122
2
11 coshcossinsinh)( −+
−= …….... (7.3)

138
where,
( ) ( )[ ]( ) ( )
−++
−++⋅+=
LpCpLpCppp
LpCpLpCpBC
nAnnAnn
n
nAnnAnnn
1212
22
2
1
1212
22
sinhsin
coshcos …………...... (7.4)
and,
( ) ( )
( ) ( )
−++−−
−+++−
−=Lp
pLp
paLpp
ppLpp
Lpp
Lpp
aLppLpp
ppCB
nn
nn
nnnn
nnn
nn
nn
nnnnn
n
nnn
12
22
41
221
2
12
222
22
11
41
2212
222
2
1
cosh1cos1sinhsin
sin1sinh1coshcos
ηββ
ηββ
. (7.5)
And in the temporal domain the solution is:
tFtEtT nnnnn ωω cossin)( += ………………………………....……….. (7.6)
After simplifying equations 7.3 to 7.6 and inserting the results into equation 7.2; Bn, En and
Fn remain unknown and the equations is:
∑∞
=
+=1
]cossin)[(),(n
nnnnnn tFtExXBtxw ωω …………………………. (7.7a)
∑∞
=
+=1
]cossin)[(),(n
nnnnn tFtExXtxw ωω ……………………….……. (7.7b)
The two constants ( nB and nE ) and ( nB and nF ) in equation 7.7 can be combined into two
unknown constant to solve using the initial conditions. The new constant then becomes:
nnn EBE = , and nnn FBF = ……………………..………………... (7.8)
The constant nF is associated with the unique nth eigenvalue for every mode of vibration. In
this study the first 6 eigenfunctions are utilized to estimate the initial displacement along the
beam. These constants in equation 7.9 can be determine from the initial conditions at time
zero (t = 0).

139
)()(.....)()()()(
)()()()()()()()(),(
666555
444333222111
tTxXFtTxXFtTxXF
tTxXFtTxXFtTxXFtTxXFtxw
nnn++++
+++= . (7.9)
where the initial conditions are the displacement and the velocity of the beam at time equal to
zero:
)()0,( 1 xXxw = ………………..…….…………..…………………….. (7.10)
where )(1 xX is the displacement of the beam with zero voltage )V0( =−+V input for the
piezo actuators, zero tip mass (η = 0)and zero axial load (k = 0). This configuration is that of
a plain cantilever beam and the initial tip deflection 2)()0,( 1 == LXLw is chosen as a
condition for normalization of the series of eigenfunctions for the beam.
0)0,(=
dtxdw ………….….……….….………..….…………………… (7.11)
From the above initial condition the solution in the time domain is tFtT nnn ωcos)( = . At time
zero (t = 0), )1()0( nn FT = in equation 7.7 and therefore:
)()(...)()()()()()( 1665544332211 xXxXFxXFxXFxXFxXFxXFxXF nn =+++++++ ….
(7.12)
The spatial function )(xX n will be used as nX and )(tTn will be used as nT . Multiply
equation (110) by the corresponding eigenfunctions to generate equations 7.13a to 7.13g.
111166155144133122111 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ …. (7.13a)
212266255244233222211 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ …. (7.13b)
313366355344333322311 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ …. (7.13c)
414466455444433422411 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ ..... (7.13d)
515566555544533522511 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ …. (7.13e)
616666655644633622611 ... XXXXFXXFXXFXXFXXFXXFXXF nn =+++++++ … (7.13f)

140
nnnnnnnnnn XXXXFXXFXXFXXFXXFXXFXXF 1665544332211 ... =+++++++ … (7.13g)
This generates an infinite series of equations with infinite number unknown constants )( ......1 nF
which can be solved simultaneously after integrating the terms on the LHS and RHS over the
length of the beam in equations 7.13a to 7.13g. Equation 7.13a to 7.13g can be presented in
matrix notation by letting and :
= ……………... (7.14a)
were is an matrix, is an vector and is an vector.
therefore (7.14b)
7.2 Convergence of the eigenfunction series expansion
The total solution for this problem is composed of an infinite number of functions Xn (x) and
Tn(t), where n ϵ {1,2,3,…. ∞} that satisfy the boundary conditions and differential equation
for a beam with axial load, tip mass and piezo actuators. All these individual functions can
be considered a solution to the initial value problem, but in most cases when using a single
function to estimate the initial condition, the estimated solution is unacceptable. For
example, in equation 7.10 above, the displacement along the beam can be characterized with
a function )(1 xX at time zero (t = 0). For this function, )(1 xX the tip mass ratio is zero
(η = 0), the axial load ratio is zero (k = 0) and the voltage input into the piezo is zero
)V0( =−+V .
In this case, the initial function is chosen as the exact solution for a cantilevered beam and it
is therefore noted in Figure 7.1 that for tip mass ratio is zero (η = 0), the axial load ratio is
zero (k = 0) the tip displacement remains the same regardless of the number of eigenfunctions

141
used to estimate the solution. For this case, the constants ( nF ......1 ) in equations 713a to 7.13g
can be solved and it is found that only the constant that is associated with the first mode of
vibration of a cantilevered beam is non-zero. The constants associated with the higher modes
of vibration approach zero in the limit.
Figure 7.1: Convergence of eigenfunction expansion for Voltage = 0V
The rest of the constants ( nF ......2 ) are infinitesimal and therefore, their associated
eigenfunctions do not contribute to the estimation of the displacement. In this case it is
adequate to use one solution to solve the initial value problem. This is a special case as can
be observed from Figure 7.1. When the tip mass ratio is non-zero (η ≠ 0), the axial load ratio
is non-zero (k ≠ 0) there is variation in the displacements as the number of eigenfunctions in
the series expansion increases.
From Figures 7.1 and 7.2 it is noted that for certain combinations of axial load ratio and tip
mass ratio the displacements are not identical. This means that the series of eigenfunctions
does not satisfy the initial condition exactly and the sum of the functions approaches a critical
point, which is a displacement of two units at the tip of the beam, 2)(1 =LX . In other words,
the relation below should hold true.
)()()(lim 11
xXtTxXFn
iiiin =∑
=∞→ ………………………………………….. (7.15)

142
If the sum of the functions does not satisfy the initial conditions exactly there will be some
residual (ϵ ). This residual should be kept very small to render the approximation as close to
the exact solution as possible.
<−∑=
)()0()( 11
xXTxXFn
iiii ϵ ……………...……….…..……….…….. (7.16)
If the tip mass ratio is disregarded (η = 0), Figure 7.1 shows that the largest residual occurs
when only the first mode is used to approximate the initial function. The biggest percentage
difference in the exact solution and the approximate solution is 2.54% for a compressive axial
load (k = +0.8). For maximum axial load ratio (k = -2), the absolute value of the percentage
difference in displacement residual is 1.68% at the same tip mass ratio. When the numbers of
eigenfunctions used to approximate the solution is increased, the maximum percentage
difference drops to 0.0288% for a six eigenfunction expansion. This difference is so small
and the first six functions are adequate to approximate the initial conditions.
In Figures 7.1 and 7.2 the estimated displacement at the tip is shown. It can be clearly seen
that a single eigenfunction solution expansion is not adequate to satisfy the initial value
problem. As the numbers increase beyond the first three eigenfunctions, )(1 LX , )(2 LX and
)(3 LX the series resonates about the exact solution such that the total sum of the
contributions is 2 units
Figure 7.2: Convergence of eigenfunction expansion for Voltage = 0V

143
+= )(),( 1 xXtxw ϵ and −= )(),( 1 xXtxw ϵ …………..……………….(7.17)
From the tables and figures above increasing the number of terms in the series beyond
four (4) increases the accuracy of the eigenfunction expansion marginally. Therefore the
number of terms used to estimate the solution is limited to six (6) terms. This study seeks to
find out the effects of the piezo on the structure and so it is also of interest to investigate the
convergence of the eigenfunction expansion when the piezo actuators are active
)V1000( =−+V . Figure 7.3 and 7.4 show the tip displacement for an incremental number of
eigenfunctions for an active beam. Right away it is noted that the results from using the first
eigenfunction solution do not match those of a cantilevered beam, which is 2)(1 =LX .
The biggest variation in the tip displacement occurs when only one eigenfunction is used to
estimate the solution. When the tip mass ratio and the axial load ratio is varied, it is noted
that the largest residual occurs when there is no tip mass (η = 0) and the beam is in
compression (k = +0.8). This difference amounts to a 4.24% percentage difference compared
to the initial value, 2)(1 =LX at time zero (t = 0). The difference is also apparent when
there is no tip mass (η = 0) and axial load (k = +0.8) but the piezo actuators are
active )V1000( =−+V ; and amounts to 1.06% compared to 0.02% for an inactive beam
)V0( =−+V .
Figure 7.3: Convergence of eigenfunction expansion for Voltage =1000V

144
For the extreme loading, compression (k = +0.8) and tension (k = -2), the largest percentage
variation in the tip displacement is noted, 4.24% and -1.8073%. By increasing the number of
eigenfunctions to six, the percentage difference drop to 0.0153% and 0.0083%, for (η = 0,
k = +0.8) and (η = 0, k = -2), respectively. In Figure 7.3 and 7.4 the eigenfunction series
converges to 2)(1 =LX . The same observation was made earlier when the piezo actuators
were inactive )V0( =−+V in Figures 7.1 and 7.2
Figure 7.4: Convergence of eigenfunction expansion for Voltage =1000V
If the axial load is kept constant and the tip mass varied, it is observed that the largest
percentage difference of 6.90% occurs when the tip mass ratio is maximum (η = 5) and
1.0568% when there is no tip mass (η = 0). Again, as the number of terms in the series is
increased, the approximation converges to the exact solution. For six terms (n = 6) in the
eigenfunction expansion series, the percentage difference is approximately 0.02%.
7.3 Complete dynamic solution
The full solution to this problem is made up of a sum of an infinite number of functions. All
these functions contribute to the transverse displacement and the total amplitude of vibration
of the full solution. Because of our choice of the initial displacement function, the tip
displacement is 2)0,( =Lw . A summary inspection of Tables 7.1 to 7.4 shows that the initial
amplitude at the tip of the beam is almost identical to two (2) units, with a small residual

145
(ϵ >>1). This residual is expressed in equation 7.16 above and in the present problem
0.0083% < ϵ < 0.0322% percentage difference. In Table 7.1 to 7.4 it is observed that the
fundamental (1st) mode of vibration contributes the largest displacement to the amplitude,
while the other modes only contribute a smaller percentage of the amplitude.
Table 7.1: Tip deflection contribution of individual eigenfunctions with V0=−+V for
varying axial load ratios (k).
No. of eigen functions
V=0V
Tip Displacement V= 0V ;
η = 0; k = 0.8
Tip Displacement V= 0V ;
η = 0; k = 0
Tip Displacement V= 0V ;
η = 0; k = -1
Tip Displacement V= 0V ;
η = 0; k = -2 1st 2.0755 1.9994 1.9237 1.8643 2nd -0.0690 0.0001 0.0673 0.1186 3rd -0.0042 0.0000 0.0050 0.0097 4th -0.0018 0.0000 0.0022 0.0043 5th -0.0005 0.0000 0.0006 0.0011 6th -0.0003 0.0000 0.0004 0.0007
w(L,0) 1.9999 1.9995 1.9991 1.9987
When the tip mass is zero (η = 0) and the axial load is zero (k = 0), the first mode of vibration
contributes 99.97% of the sum of the displacements and the rest of the modes 0.005% (the
rest of the displacement can be accounted for in the residual (ϵ). In Table 7.1 it is observed
that the second (2nd) mode contributes a displacement of 0.0001 units at the tip and all the
other modes contribute zero. In the second mode of vibration it is concluded that the
maximum amplitude of vibration will be 0.0001 units, which in turn tells us that the
associated constant nF , is infinitesimal )0( →nF . All the modes of vibration exhibit a
sinusoidal behavior which is characterized by the solution derived in Section 7.1:
txXFtxw nnn ωcos)(),( = ……...….………………….………..………. (7.17)
This study does not take damping into account; whether it is natural damping or forced
damping of the structure. The solution in equation 7.17 has no damping and therefore it is
expected that the maximum amplitudes for the different modes will be maintained for t > 0.
In Table 7.1 to 7.4, it is observed that the contribution of the second mode to the overall
amplitude becomes more significant as the tip mass ratio (η) and the axial load ratio (k) are
varied. In Table 7.1 the first mode contributes for 103.78%, 99.97%, 96.19% and 93.22% to
the total amplitude for a constant mass ratio (η) for an axial load of k = +0.8, 0, -1, -2. The

146
second mode contributes -3.45%, 0.005%, 3.365% and 5.93% for the same axial loading.
The negative or positive sign of the contribution is significant in that it tell us that the first
mode is overestimated or underestimated compared to the initial displacement function. If
the estimate of the first mode is bigger than two (2) units, then the first mode overestimates
the amplitude and if it is under two, the amplitude is underestimated.
Table 7.2: Tip deflection contribution of individual eigenfunctions with V0=−+V for
varying mass ratios (η).
No. of eigen functions
V=0V
Tip Displacement V= 0V ;
η = 0; k = 0
Tip Displacement V= 0V ;
η = 0.1; k = 0
Tip Displacement V= 0V ;
η = 1; k = 0
Tip Displacement V= 0V ;
η = 5; k = 0 1st 1.9994 1.8777 1.6351 1.5983 2nd 0.0001 0.1225 0.3675 0.4022 3rd 0.0000 -0.0005 -0.0029 -0.0010 4th 0.0000 -0.0002 -0.0002 -0.0001 5th 0.0000 -0.0001 0.0000 0.0000 6th 0.0000 0.0000 0.0000 0.0000
w(L,0) 1.9995 1.9995 1.9995 1.9995
From the tables it is noted that the contribution can be a positive or negative addition. The
sum of the individual contributions wn(L,0) in Table 7.1 to 7.4 adds up to approximately two
units with a very small residual.
Table 7.3: Tip deflection contribution of individual eigenfunctions with V1000=+−V for
varying axial load ratios (k).
No. of eigen functions V=1000V
Tip Displacement V= 1000V ;
η = 0; k = 0.8
Tip Displacement V= 1000V ; η = 0; k = 0
Tip Displacement V= 1000V ; η = 0; k = -1
Tip Displacement V= 1000V ; η = 0; k = -2
1st 2.1222 2.0404 1.9588 1.8947 2nd -0.1042 -0.0298 0.0429 0.0985 3rd -0.0104 -0.0060 -0.0007 0.0042 4th -0.0040 -0.0022 0.0001 0.0022 5th -0.0015 -0.0010 -0.0004 0.0001 6th -0.0006 -0.0006 -0.0002 0.0001
w(L,0) 2.0014 2.0008 2.0004 2.0000
When the axial load (k) is kept constant and the tip mass (η) varied, in Table 7.2, the first
mode contributes 99.97% , 93.885%, 81.755% and 79.915% and the second mode contributes

147
0.005%, 6.125%, 18.375% and 20.11%. The second most significant contributions to the
total amplitude can be attributed to second mode of vibration. The rest of the modes have
some contribution to make but will not affect the vibrations in any significant way.
Table 7.4: Tip deflection contribution of individual eigenfunctions with V1000=+−V for
varying mass ratios (η).
No. of eigen functions V=1000V
Tip Displacement V= 1000V ; η = 0; k = 0
Tip Displacement V= 1000V ;
η = 0.1; k = 0
Tip Displacement V= 1000V ; η = 1; k = 0
Tip Displacement V= 1000V ; η = 5; k = 0
1st 2.0404 1.8553 1.6207 1.5859 2nd -0.0298 0.1444 0.3819 0.4147 3rd -0.0060 0.0000 -0.0029 -0.0010 4th -0.0022 -0.0002 -0.0002 -0.0001 5th -0.0010 0.0000 0.0000 0.0000 6th -0.0006 0.0000 0.0000 0.0000
w(L,0) 2.0008 1.9995 1.9995 1.9995
In Table 7.3 and 7.4, the same trends are observed as above for a beam with inactive piezo
actuators. In Table 7.3, when both the tip mass ratio, axial load ratio are zero and the piezo is
active )V1000( =−+V ; the second modes has a large contribution to the amplitude -1.49% as
oppose to 0.005% for an inactive piezo )V0( =−+V . It is further noticed that the higher
modes contribute when the beam is active )V1000( =−+V in all cases and also that in
Tables 7.1 to 7.4 most of the higher modes make a contribution to the initial tip displacement.
The largest tip displacement is 2.0014 units which corresponds to zero voltage )V0( =−+V ,
zero tip mass ratio (η = 0) and tensile load (k = +0.8); and that represents a 0.07%
overestimate; and the lowest tip displacement is 1.9987 units which corresponds to maximum
voltage )V1000( =−+V , zero tip mass ratio (η = 0) and maximum compressive load (k = -2)
and that represents an under estimate of 0.065%. The residual (ϵ) is approximately 0.0014
units.
The general solution to this problem is derived by using the method of separation of variables
which entails two solutions, one in the spatial domain and the other in the time domain. The

148
solution in the time domain involves a sinusoidal function ( tF nn ωcos ) in which the circular
frequency ( nω ) and the period ( ) can be written as:
c
ccnn m
IELR 2
=ω ………........….……….….……………….………. (7.18)
nωπ2 ………………………………………..…….………..………. (7.19)
The period ( ) is the time taken for the system to complete one full oscillation. From the
above equations it is noted that the circular frequency and the period are directly linked to
natural frequency (Rn) of vibration. For example, R1 = 1.8751 for the first natural frequency
of vibration for cantilevered beam. For the different combinations of parameters: voltage, tip
mass, axial load, extended mass, etc., the natural frequencies are unique and if follows that
the circular frequency ( nω ) and the period ( ) are unique for all possible combinations of
parameters. After separation of variables the differential equation that describes the motion
of the beam with respect to time becomes:
0=)(+)( 2••
tTωtT nn …...…..……..………………………..…………… (7.20)
with a general solution:
tFtEtT nnnnn ωω cossin)( += ……………..…........………………. (7.21)
From equation 7.19 and 7.20 above, the period can be determined and in the Figure 7.5 below
the phase angle or phase constant (ø) can be defined. Figure 7.6 shows a periodic function
with the phase and the period of oscillation. The phase angle helps to determine the first peak
of the harmonic oscillation. To analyze the above, choose two constants (ø) and (G) which
can be satisfied in the figure below.

149
Figure 7.5: Right angled triangle that shows the relation between (ø) and (G)
Therefore after using Pythagoras:
nn EFG += …………..….………….…….…..……..………….…. (7.22)
Noting that,
GF
φ n=cos and GE
φ n=sin also, n
n
FE
φ =tan (7.23)
+= t
GFt
GEGtT n
nn
nn ωω cossin)( …………...…....….....………..…. (7.24a)
( )ttGtT nnn ωφωφ coscossinsin)( += ……....…..……….……..……. (7.24b)
And by using the cosine addition formula:
)cos()( φω −= tGtT nn …………………..…..…………………………. (7.25)
Figure 7.6: Phase angle (ø) and period ( ) of oscillation
Ø
G
w(x
,t)
time(s)
n
n
ωφ
)n
tn
cos()x(n
Xn
G)t,x(w φω −=

150
7.4 Oscillation of the beam for b1 = 0
In this section the oscillation of the beam for a concentrated tip mass (b1 = 0) is investigated
and thereafter the discussion is expanded to the results obtained for an extended tip mass
(b1 > 0). Figure 7.7 shows the effects of the axial load and the tip mass on the frequency of
vibration of the beam. It has been noted that as the axial load ratio increases from a
compressive load to a tensile load, the frequency of vibration increases and as we increase the
tip mass ratio, the frequency of vibration decreases.
The minimum number of oscillations occurs at an axial load ratio of k = +0.8 and a tip mass
ratio of η = 5 and it is 24.20Hz for zero voltage and 6.38Hz for maximum voltage, whereas
the maximum oscillations occur at maximum tensile loading k = -2 and tip mass ratio η = 0
and the frequency is 755.16Hz for zero voltage and 738.72Hz for maximum voltage. The
percentage difference at zero tip mass ratio (η = 0) and axial load ratio (k = +0.8) is
approximately 73.20% for an uncontrolled )V0( =−+V and a controlled )V1000( =−
+V beam;
and as the load ratio is increased to k = 0, -1 and -2; it becomes 8.62%, 3.69% and 2.18%,
respectively. The above mentioned oscillations are due to the first or fundamental harmonic.
In Figures 7.10 to 7.13, the oscillation amplitude contribution of the first harmonic is larger
than in the other two harmonics. The second harmonic amplitude contributions to the full
solution increase as the tip mass increases and therefore this harmonic will be of interest
when mapping out the oscillations the beam. The third and higher harmonics of the series
have a negligible amplitude contribution because as the number of functions (n) used in the
full solution is increased, the amplitudes of the higher harmonics tend to zero because
0→nF , as n → ∞.
Figures 7.7 to 7.9 show the oscillation frequencies of the beam. For a compressive load a
significant amount of control of the vibrations is achieved and as the axial load ratio increases
the piezo actuator loses its efficacy up to approximately 3%. Figures 7.7 to 7.9 show the
frequencies as the axial load ratio for a particular tip mass ratio (η = 0, 0.1, 1, 5) is varied and
the moment arm is kept constant at b1 = 0, L/2, L/1. From these figures it is noted that the
curves decrease monotonically for the relation between the frequency and the axial load ratio.
What is most significant is that the frequency difference between a controlled and an
uncontrolled beam decreases as the axial load ratio is increased. Figure 7.7 to 7.9 show an

151
overlap in the frequencies for a controlled and an uncontrolled beam at approximately k = -2.
That indicates clearly that the piezo actuator has an insignificant effect on the vibrations of
the system. When a tip mass is added, Figure 7.7(b) to 7.7(d) show a decrease in the
frequencies of oscillation.
For a compressive load the difference is largest and decreases as the axial load ratio
increases, where the curves converge at an axial load ratio of approximately k = -2 . These
masses tend to attenuate the vibrations of the system and added to the effects of the piezo
actuator, decrease the vibration of the system further. For a tip mass ratio η = 0, 0.1, 1, 5 the
difference in the frequencies of the controlled and uncontrolled beam is approximately 73%
in compression and approximately 3% at maximum tensile load. Therefore it is reasonable to
conclude that the piezo actuators have some notable contribution to the change in frequency
of oscillation of the beam.
The above discussion is based on the first harmonic which is represented by the lowest
frequency on the amplitude spectrum plot, Figures 7.10 to 7.13. The plots also indicate the
2nd and 3rd harmonic of the vibration and contribute to the overall vibration profile of the
beam. From these figures it is noted that the frequency difference between a controlled beam
and an uncontrolled beam is below 1% and this goes to show that the piezo actuators have
minimal effect on the frequency of oscillation in the 2nd and 3rd harmonic. From this data it
can be concluded that the 1st harmonics are dominant and by altering the frequencies of these
harmonics the vibration characteristics of the beam can be altered.

152
(a)
(b)
(c)
(d)
Figure 7.7: Frequencies for controlled and uncontrolled beams for b1 = 0. (a) η = 0, (b) η = 0.1, (c) η = 1 and (d) η = 5

153
7.5 Oscillation of the beam for b1 = L/2
In this section the mass in not concentrated such that the center of gravity of the attached
mass does not coincide with tip of the beam. The extension of the beam is regarded
weightless and in addition the effects of rotary inertia on the vibrations of the beam are
included. From Figure 7.8 below, it can be observed that there are changes in the oscillation
frequencies of the system, noting that as the axial load ratio is increased the frequencies
increase. The maximum frequency occurs when the axial load ratio is k = -2 and the beam is
under maximum tensile load.
In Figure 7.8 the effects of the axial load and tip mass on the oscillation frequencies, when
the center of gravity of the tip mass is half the length of the beam away from the tip is
demonstrated. It is noted from Figure 7.7(a), 7.8(a) and 7.9(a) that the maximum oscillation
frequency is ~760Hz for maximum tensile load (k = -2) and zero tip mass ratio (η = 0) for all
cases. This should be expected since the extension is weightless and therefore its length does
not add any mass at the tip. Furthermore, the percentage difference at maximum tip mass
ratio and maximum tensile axial load ratio are approximately zero. This indicates that the
piezo actuator has no effect on the system at those limits.
When the load ratio is tensile (k ≥ -1) the frequency of oscillation of the beam are identical
for maximum axial load ratio (η = 5). This indicates that the piezo layer have no effect on the
oscillation of the tip for large tip masses and axial load ratio in excess of k = -1.

154
(a)
(b)
(c)
(d)
Figure 7.8: Frequencies for controlled and uncontrolled beams for b1 = L/2. (a) η = 0, (b) η = 0.1, (c) η = 1 and (d) η = 5

155
7.6 Oscillation of the beam for b1 = L/1
For an extension with a length equal to the length of the beam the results are presented in
Figure 7.9. In these figures the same trends are noted as was observed earlier in the analysis,
with b1 = 0 and b1 = L/2. In this instance there is a further drop in the oscillation frequencies
of the beam. There is a percentage drop of 21.29% and a percentage drop of 19.2% for an
uncontrolled beam )V0( =−+V and for a controlled beam )V1000( =−
+V for a compressive
load (k = +0.8) and tip mass ratio η = 5, when b1 = L/2 and b1 = L/1, respectively.
The lowest frequencies of oscillation are obtained when the moment arm is maximum
(b1 = L/1) and the effects due to rotary inertia are taken in to account. When the frequencies
of oscillation for a moment arm of zero (b1 = 0) and the maximum moment arm (b1 = L/1), a
percentage difference of 35.79% for an uncontrolled beam and 38.79% for a controlled beam
is noted. This conclusively suggests that the length of the extension has a significant effect
on the oscillation at the tip of the beam.
From Figure 7.9 the convergence of the two graphs occurs at k = -1. The effect of the tip
mass is to reduce the natural frequencies of the system, as observed in earlier discussion in
Chapter 4 and the extension at the tip of the beam also contributes to the lowering of the
oscillation frequencies. This effect manifests itself in the oscillation of the tip of the beam
were slower oscillations are noted.
Again it is observed that the frequencies of oscillation of the tip in Figure 7.7 to 7.9 are
identical when the tip mass ratio of the system is zero (η = 0) for both the uncontrolled and
the controlled beam. The percentage difference for an axial load of k = - 1 for η = 0, 0.1, 1, 5
is 1.984%, 4.345%, 4.81% and 4.76%, respectively.

156
(a)
(b)
(c)
(d)
Figure 7.9: Frequencies for controlled and uncontrolled beams for b1 = L/1. (a) η = 0, (b) η = 0.1, (c) η = 1 and (d) η = 5

157
7.7 Amplitude spectrum for the cantilevered beam
In Figures 7.10 to 7.13 the dynamic solution of the problem is plotted and the amplitude
spectrum is indicated in the figures below. The dynamic solution function is made up of
series of eigenfunctions which can be summarized in the following equation:
∑=
=6
1cos)(),(
nnnn txXFtxw ω …..….…….…….………..………. (7.26)
The first term, )(xXF nn , represent the amplitude of the vibration and the second term,
tnωcos , contains the oscillation frequency of the beam. These two parameters, amplitude
and frequency, are represented in the amplitude spectrum plots in Figures 7.10 to 7.13. From
the amplitude spectrum figures it is noted that the dynamic solution, Figures 7.10a to 7.10d,
7.11a to 7.11d, 7.12a to 7.12d and 7.13a to 7.13d, are a sum of a series of cosines with
different amplitudes and cyclic frequency. The different harmonics are shown in the
amplitude spectrum figures and from these figures the magnitude of the effect that a
particular harmonic has on the entire system can be determined. This however does not tell
us about the phase (ø) of the harmonic. The phase gives us information to determine if the
harmonics are constructive or destructive when added together.
The amplitude spectrum plots show only the first three oscillation frequencies of the system.
This can be justified by using the findings in Section 6.2, where it was concluded that six (6)
eigenfunctions would converge to a reasonable estimation. Furthermore, Figure 7.1 to 7.4
shows that three functions are adequate and therefore only the first three harmonics are
shown in the figures.
In Section 7.4 to 7.6 the frequencies of oscillations for the various combinations of axial load,
tip mass, piezo electric field and the length of extension of the tip mass were discussed based
on the fundamental mode (1st eigenfunction – ),(1 tLw ,where n = 1 ) . However, the complete
solution is composed of a sum of an infinite number of eigenfunctions n ϵ {1,2,3,…. ∞} and
therefore the higher modes n > 1 cannot be neglected even though the piezo actuators have a
negligible effect on those frequencies. For this reason, it is observed that the oscillation plots
of Figures 7.10 to 7.13 are not smooth. The initial displacement of the beam is defined as the

158
first mode of a cantilever beam. In the Figures 7.10(b), 7.10(f) and 7.10(j) the second
harmonics have extremely small amplitudes. Table 7.1 indicates that at V0=−
+V and k = 0
the tip displacement is 1.9994 units which is identical to the exact solution and therefore the
second harmonic contributes zero displacement to the initial deflection of the tip. When the
axial load, tip mass and voltage are included the amplitude of the second harmonics increase
and contribute to the initial amplitude. The harmonics are out of phase and have different
amplitudes and periods and when combined produce the jagged curves of Figure 7.10 to 7.13.
In Figures 7.10 to 7.13 it is observed that the contribution of the second harmonic becomes
larger as the tip mass increases and the piezoelectric experiences maximum voltage input.
The increase in the amplitude of the second harmonic can also be attributed to the non-
orthogonality of the initial displacement function to the second mode eigenfunction.

159
(a)
(e)
(i)
(b)
(f)
(j)
(c)
(g)
(k)
(d)
(h)
(l)
Figure 7.10: (a) to (d): Oscillation of uncontrolled beam and controlled beams. (e) to (h): Amplitude spectrum of uncontrolled beams.
(i) to (l): Amplitude spectrum of controlled beams; η = 0 0V 1000V

160
(a)
(e)
(i)
(b)
(f)
(j)
(c)
(g)
(k)
(d)
(h)
(l)
Figure 7.11: (a) to (d): Oscillation of uncontrolled beam and controlled beams. (e) to (h): Amplitude spectrum of uncontrolled beams.
(i) to (l): Amplitude spectrum of controlled beams; η = 0.1 0V 1000V

161
(a)
(e)
(i)
(b)
(f)
(j)
(c)
(g)
(k)
(d)
(h)
(l)
Figure 7.12: (a) to (d): Oscillation of uncontrolled beam and controlled beams. (e) to (h): Amplitude spectrum of uncontrolled beams.
(i) to (l): Amplitude spectrum of controlled beams; η = 1 0V 1000V

162
(a)
(e)
(i)
(b)
(f)
(j)
(c)
(g)
(k)
(d)
(h)
(l)
Figure 7.13: (a) to (d): Oscillation of uncontrolled beam and controlled beams. (e) to (h): Amplitude spectrum of uncontrolled beams.
(i) to (l): Amplitude spectrum of controlled beams; η = 5 0V 1000V

163
Chapter 8 – Conclusions
8.1 Conclusion
In the investigation carried out in this study the aim is to study the effects of piezoelectric
actuators on the frequencies of a cantilevered beam with tip mass and axial load at the free
end. The voltage input into the piezo layers causes a change in the frequencies of vibration.
The tip mass is modeled as a concentrated mass and an extended mass. Piezoelectric
actuators were used to modify the moments at the free end of the beam, which in turn alters
the natural frequencies of the beam. The piezoelectric actuators can be used to adjust the
boundary conditions such that the frequencies of vibration can be increased or decreased. In
this study, more emphasis is dedicated the reduction of frequencies, but it was shown that the
natural can be increased. Classic beam theory was used to approximate the vibration
characteristics of the system. The eigenvalues that govern the solution were altered using
piezoelectric actuators by modifying the moments generated at the boundaries of the
piezoelectric beam.
Piezo actuators have an attractive quality because they can convert mechanical strain into
electric potential or electric potential into mechanical strain. To produce a desired strain, a
limited amount of voltage can be induced to avoid piezo breakdown. The manufacturers’
data for piezo patches recommend 1000V/mm of thickness. The piezoelectric composite
beam is made from two actuators of equal thickness on the top and bottom surface of an
elastic column sandwiched in the middle. The governing equations for the model were
developed to allow for discrete voltage inputs to the piezo layers to decrease or increase the
natural frequencies.
The thickness of the piezo was increased from 1mm to 2mm and the input voltage from
1000V to 2000V resulting in a further reduction of the frequencies. At η = 0, a 40%
reduction in the frequency can be attained for k = +0.8 and 2% for k = -2 for 1mm thickness
and that frequency reduction is doubled by increasing the piezo layers to 2mm. When the
thicknesses of the piezo are increased while keeping the cross sectional area constant the
system resembles a bimorph piezo beam.

164
A compressive axial load reduces the natural frequencies and when the natural frequencies
approach zero, the beam approaches buckling mode and tensile axial load increases the
frequency. This loading causes an overestimation or underestimation in the approximation of
the initial value of the displacement of the beam determined from the first harmonic’s
amplitude. This over estimation is corrected by the second and higher harmonics with a
negative or positive displacement such that the sum of all the amplitudes in the different
harmonics adds up to the stipulated initial condition for an uncontrolled and controlled beam.
A tensile axial load increases the natural frequencies and the piezo electric actuators are
effective up to maximum axial load ratio k = -2. The tip mass has the effect lowering the
natural frequencies. As the tip mass increases, the behavior of the piezo electric cantilevered
bean changes to that of a clamped-pinned beam and the piezo actuators loose effectiveness
when the mass becomes too large. The beam tip mass ratio in this investigation is limited to
η = 5, to allow for control of the frequencies using piezo actuators.
For a concentrated tip mass the center of gravity of the mass coincides with the end of the
beam. The line of action of the center of gravity for an extended mass goes through a point
which lies at some distance away from the tip of the beam. In this case a moment arm is
introduced and the analysis also takes rotary inertia in consideration. The effect of rotary
inertia is to lower the frequencies. A concentrated mass yields higher natural frequencies
compared to those of an extended mass with inertia. Both the concentrated and extended
mass has the effect of lowering of the natural frequencies. In addition, the tip mass has an
effect of increasing the amplitude of the second harmonic. If the eigenfunction for a
particular harmonic is not orthogonal to the initial displacement function, the second and
higher modes contribute to the vibration profile of the beam.
The line of action of the center of gravity for this investigation is zero (L/∞) for concentrated
load, half length (L/2) of the beam and full length (L/1) of the beam from the tip of the
column. At maximum tip mass, zero axial load and zero voltage the frequencies are
0.6288s-1, 0.5588s-1 and 0.4954s-1 for (L/∞), (L/2) and (L/1), respectively. This indicates that
the tip mass extension will lower the frequencies. The dimensions of the mass have to be
taken into consideration for a more accurate and realistic model.
The following 4 parameters tend to lower the frequencies of vibration: (1) compressive axial
load, (2) tip mass, (3) moment arm (extension) and (4) piezo actuators. A tensile load has the

165
opposite effect and tends to increase the frequencies. In this study, the percentage level of
reduction caused by the first three parameters mentioned above was not investigated. Even
though the total frequency reduction is made up of contributions from the end conditions
(axial load, tip mass and moment arm) the piezo actuator also contribute significantly within
the limits outlined (-2 < k < +0.8 and 0 < η < 5).
To obtain a solution to this boundary value problem a separable solution is employed. The
dynamic part of the solution produces harmonics that are associated with the eigenfunctions.
The sum of these periodic harmonics gives us a vibration profile of the piezoelectric beam.
In free vibration there are an infinite number of modes and these modes are characterized by
the natural frequencies where the first mode is derived from the 1st natural frequency, the
second mode by the second 2nd frequency, etc. The 1st mode is the fundamental mode and the
most important in the analysis of the system. The vibrations on the piezo electric beam are
affected by piezo actuation most significantly in the fundamental mode. The 2nd modes
frequencies are affected minimally and the higher modes effects are negligible.
The solution of the problem is achieved with the use of six eigenfunctions. Normally, this
type of approximate solution would require an infinite number of eigenfunctions to arrive at
the exact solution. In this case, the use of six eigenfunctions is adequate and yields a
residual error of approximately 0.0015% compared to the exact solution which is a function
defined by the first mode of free vibration for a plain cantilever beam.
8.2 Future research
Further studies will be undertaken to analyze a beam with tip mass and axial load where we
can damp out the vibration of the system. Because the system is a distributed parameter
system using Lyapunov’s direct method the vibrations can be damped out. This method has
been proven to be effective in damping out the fundamental mode. Further research will be
undertaken in the field of nanomaterial where CNT are used as sensors. Vibration analysis of
these materials can be utilized and the frequency profile generated used to identify molecules
that attach to the nanotubes e.g. bacteria, viruses, chemicals, etc. The analysis will be
conducted using nonlocal theories for bending and surface effects due to the surface to bulk
ratio will be studied.

166
Bibliography
[1] Abedinnasab MH, Kamali Eigoli A, Zohoor H and Vossoughi GH (2011) On the
influence of centerline strain on the stability of a bimorph piezo-actuated micro
beam Scientia Iranica B 18(6) pp. 1246-1252
[2] APC International LTD. (2013) Piezo Theory
http://www.americanpiezo.com/piezo-theory/pzt.html
[3] Bailey T and Hubbard JE (1985) Distributed piezoelectric-polymer active
vibration control of a cantilever beam Journal of Guidance, Control and
Dynamics. 8 pp. 605-611
[4] Balachandran B and Magrab EB (2009) ibrations Toronto, Canada: CENGAGE
Learning
[5] Baras JS and Zhuang Y (1992) Active vibration damping using smart materials
Workshop on Distributed Parameter Modeling and Control of Flexible Aerospace
Systems Williamsburg, VA.
[6] Banks HT, Smith RC and Wang Y Smart Material Structures: Modeling,
Estimation and Control, Willey, Chichester and Masson, Paris, 1996
[7] Belouettar S, Azar L, Daya EM, Laptev V and Potier-Ferry M (2008) Active
control of nonlinear vibration of sandwich piezoelectric beams: A simplified
approach Computer and Structures 86 pp. 386-397
[8] Benjeddou A (2000) Advances in piezoelectric finite element modeling of
adaptive structural elements: a survey Computers and Structures 76 pp. 347-363
[9] Blevins RD (1979) Formulas of natural frequencies and mode shapes New York:
Van Nostrand Reinhold pp. 101-113
[10] Bokaian A (1988) Natural frequencies of beams under compressive axial loads
Journal of Sound and Vibration 126(1) pp. 49-65
[11] Bokaian A (1990) Natural frequencies of beams under tensile axial loads
Journal of Sound and Vibration 142(2) pp. 481-498
[12] Brissaud M, Ledren S and Gonnard P (2003) Modeling of a cantilever non-
symmetric piezoelectric bimorph Vol. 13, pp. 832-844 Journal of Micromechanics
and Micro engineering IOP Publishing Ltd, United Kingdom

167
[13] Burke SE and Hubbard Jr. JE (1987) Active vibration control of a simply
supported beam using a spatially distributed actuator IEEE Control Systems
Magazine Aug. pp. 25-30
[14] Chien-Chang Lin and Huag-Nan Huang (1999) Vibration control of beam-plates
with bonded piezoelectric sensors and actuators, Computers and Structures 73 pp.
239-248
[15] Cook-Chennault KA, Thambi N, Sastry AM (2008) Powering MEMS portable
devices – a review of non-regenerative and regenerative power supply systems
with emphasis on piezoelectricity energy harvesting systems. Smart Material
Structures 2008; 17:043001
[16] Crawley EF and de Luis J (1990) Use of piezoelectric actuators as elements of
intelligent structures Vol. 25(10) pp. 1373-1385 American Institute of Aeronautics
and Astronautics New York, NY
[17] de Silva CW (2000) Vibration Signal Analysis Vibration: Fundamentals and
Practice Boca Raton: CRC Press LLC
[18] Deveo DL and Pisano AP (1997) Modeling and optimal design of piezoelectric
cantilever micro-actuators Journal of Microelectromechanical Systems Vol. 6 pp
266-270
[19] Duffy KJ, Adali S (1991) ) Optimal fibre orientation of anti-symmetric hybrid
laminates for maximum fundamental frequency and frequency separation Journal
of Sound and Vibration 146(2) pp. 181-190
[20] Dunsch R and Breguet JM (2007) Unified mechanical approach to piezoelectric
modeling Sensors and Actuators A 134 pp. 436-446
[21] Edwards, Jr. CH and Penny DE (1989) Elementary Differential Equations: With
Boundary Value Problems. (New Jersey: Prentice Hall)
[22] Ertuk, A (2012) Assumed-modes modeling of piezoelectric energy harvesters:
Euler-Bernoulli, Rayleigh and Timoshenko models with axial deformations,
Computers and Structures 106-107 pp. 214-227
[23] Fridman Y and Abramovich H (2008) Enhanced structural behavior of flexible
laminated composite beams Composite Structures Elsevier Ltd. Vol. 82 pp. 140-
154
[24] Gardonio P and Elliot SJ (2005) Modal response of a beam with a sensor-
actuator pair for the implementation of velocity feedback control Journal of Sound
and Vibration 284 pp. 1-22

168
[25] Gaundenzi P, Carbonaro R and Benzi E (2000) Control of beam vibrations by
means of piezoelectric devices: theory and experiments Journal of Composite
Structures 50 pp. 376-379
[26] Ge SS, Lee TH, Zhu G and Hong F (2000) Variable control of a distributed-
parameter flexible beam Journal of Robotic Systems 18(1) pp. 17-27
[27] Gere J M and Goodno B J (2009) Mechanics of Materials (Stamford, CT:
CENGAGE Learning)
[28] Gökdağ H and Kopmaz O (2005) Coupled bending and torsional vibration of a
beam with in-span and tip attachments of Sound and Vibration 287 pp. 591-610
[29] Gürdal Z, Haftka RT and Hajela P (1999) Design and optimization of laminated
composite materials (New York: John Wiley & Sons)
[30] Habib MS and Radcliffe CJ (1991) Active damping of distributed parameter
beam transverse vibration Journal of Dynamic System, Measurement, and
Control. Vol. 113 pp. 295-299
[31] Inman DJ (2006) Vibration with control (England: John Wiley & Sons Ltd.)
[32] Inman DJ (2001) Active modal control for smart structures Philoso. Trans. Royal
Soc., Ser. A 359 (1778) pp. 205-219
[33] Janker P, Claeyssen F, Grohmann B, Christmann M, Lorkowski T, LeLetty R
and Sosniki O, Pages A (2008) New Actuators for Aircraft and Space
Applications ACTUATOR 2008, 11th International Conference on New Actuators,
Bremen, Germany 9-11 June 2008
[34] Kalamkarov AL and Drozdov AD (1996) Intelligent composite structures:
general theory and applications International Journal of Solid Structures. Vol. 33,
No.29 pp. 4411-4429
[35] Kapuria S and Alam N (2006) Efficient layer-wise finite element model for
dynamic analysis of laminated piezoelectric beams Computer Methods in Applied
Mechanics and Engineering 195 pp. 2742-2760
[36] Kayacik Ö, Brusch Jr. JC, Sloss JM, Adali S and Sadek IS (2008) Integral
equation approach for piezo patch vibration control of beams with various types of
damping Computers and Structures 86 pp. 357-366
[37] Kim SJ and Jones JD (1991) Optimal design of piezo actuators for active noise
and vibration control. American Institute of Aeronautics and Astronautics New
York, NY Vol. 19 pp. 2047-2053

169
[38] Lee SY, Ko B and Yang W (2005) Theoretical modeling, experiments and
optimization of piezoelectric multi-morph Smart Material Structures 14 pp. 1343-
1352
[39] Lumentut MF and Horward IM (2011) Analytical and experimental comparisons
of electromechanical vibration response of a piezoelectric bimorph beam for
power harvesting Mechanical Systems and Signal Processing 36 (2013) 66-86
[40] Magrab EB (2007) Natural frequencies and mode shapes of Timoshenko beams
with attachments Journal of Vibration and Control 13(7): pp. 905-934
[41] Mansour MO, Arafa MH and Megahed SM (2010) Resonator with magnetically
adjustable natural frequency for vibration energy harvesting Sensors and
Actuators A 163 pp. 297-303
[42] Mei C (2011) Studying the effects of lumped end mass on vibrations of a
Timoshenko beam using a wave based approach Journal of Vibration and
Control. 18(5) pp. 733-742
[43] Meirovitch L (2001) Fundamentals of Vibrations (New York: McGraw-Hill)
[44] Meriam JL and Kraige LG, Engineering Mechanics: dynamics. New York: John
Wiley and Sons, 2001
[45] Oliveira A, Sousa P and Costa Branco PJ (2004) Surface deformation by
piezoelectric actuator: from Park and Agrawal models to a simplified model
formulation Sensors and Actuators A 115 pp. 235-244
[46] Park JK and Moon WK (2004) Constitutive relations for piezoelectric benders
under various boundary conditions Sensors and Actuators A 115 pp. 159-167
[47] PI Ceramic GmbH (2013) Piezoelectric Actuator Materials
http://www.piceramic.com/piezo_tutorial.php
[48] Pourki F (1993) Active distributed damping of flexible structures using piezo-
electric actuators/sensors Mechanics Research Communications. Vol. 20, 4 pp.
279-285
[49] Pourki F (1993) Distributed controllers for flexible structures using piezo-electric
actuators /sensors Proceedings of the 32nd Conference an Decision and Control
pp. 1367-1370
[50] Preumont A Vibration Control of Active Structures, 2nd ed. Kluwer Academic
Publishers, London 2002

170
[51] Qiu ZC, Zhang XM, Wu HX and Zhang HH (2007) Optimum placement and
active vibration control for piezoelectric smart flexible cantilever plate Journal of
Sound and Vibration 301 pp. 521-543
[52] Rezazadeh G, Fathalilou M and Shabani R (2009) Static and dynamic stabilities
of a microbeam actuated by a piezoelectric voltage Journal Microsystem
Technologies 15 pp. 1785-1791
[53] Sadek I, Kucuk I, Zeini E and Adali S (2009) Optimal boundary control of
dynamics responses of piezo actuating micro-beams Applied Mathematical
Modelling 33 pp. 3343-3353
[54] Shaker FJ (1975) Effect of axial load on mode shapes and frequencies of beams.
Lewis Research Center: NASA TN D-8109
[55] Shu YC and Lien IC (2006) Analysis of power output for piezoelectric energy
harvesting systems Smart Materials and Structures 15 pp. 1499-1512
[56] Shudong Yu and Siyuan He (2012) Accurate free vibration analysis of
cantilever piezoelectric panel carrying a rigid mass Journal of Vibration and
Control 19(8) pp. 1187–1198
[57] Sloss JM, Adali S, Sadek LS and Bruch Jr. JC (1999) Piezoelectric displacement
feedback control with time delay SPIE Conference on Mathematics and Control
in Smart Structures. SPIE Vol. 3667 pp. 649-656
[58] Smith RC (2005) Smart Materials Systems: Model Development (Philadelphia,
PA: Society for Industrial and Applied Mathematics (SIAM))
[59] Spier C, Bruch, Jr. JC, Sloss JM, Adali S and Sadek IS (2009) Placement of
multiple piezo patch sensors and actuators for a cantilevered beam to maximize
frequency and frequency gaps Journal of Vibration and Control, 15(5): pp. 643-
670
[60] Srinivasan AV and McFarland DM (2000) Smart structures: analysis and design
(New York: Cambridge University Press)
[61] Stanton SC, Ertuk A, Mann BP, Inmann DJ (2010) Nonlinear piezoelectricity in
electrostatic energy harvesters : modeling and experimental identification Journal
of Applied Physics 108:074903
[62] Timoshenko S, Young DH and Weaver Jr. W (1974) Vibration Problems in
Engineering (New York: John Wiley & Sons)

171
[63] Trindale MA and Benjeddou A (2002) Hybrid active-passive damping treatments
using viscoelastic and piezoelectric materials: Review and assessment Journal of
Vibration and Control 8 pp. 699-745
[64] Tse FS, Morse IE and Hinkle RT (1979) Mechanical Vibrations: Theory and
Applications (Boston, MA: Allyn and Bacon, Inc.)
[65] Wang QM and Cross LE (1999) Constitutive equations of symmetrical triple
layer piezoelectric benders IEEE Trans. Ultrasonics Ferroelectric Frequency
Control 46(6) pp. 1343-51
[66] Wang QM, Du XH, Xu B and Cross LE (1999) Electromechanical coupling and
output efficiency of piezoelectric bending actuators IEEE Trans. Ultrasonics
Ferroelectric Frequency Control 46(3) pp. 638-646
[67] Weinberg MS (1999) Working equations for piezoelectric actuators and sensors
Journal of Microelectromechanical Systems Vol. 8 pp. 529-533
[68] Wood RJ, Steltz E and Fearing RS (2005) Optimal energy density piezoelectric
bending actuators Sensors and Actuators A 119 pp. 476-488
[69] Yang Y, Ju C and Kiong Soh C (2002) Analytical and semi-analytical solutions
for cantilevered column using a piezo-electric actuator Smart Material Structures
12 pp. 193-203
[70] Yim W and Singh SN (2003) Adaptive output feedback force control of a
cantilever beam using a piezoelectric actuator Journal of Vibration and Control. 9
pp. 567-581
[71] Young D and Felgar, Jr., RP (1949) Tables of Characteristic Functions
Representing Normal Modes of Vibration of a Beam No. 4913 University of
Texas, Austin Austin, TX

172
Appendix A1. Second natural frequencies.
Table A1 1: 2nd Mode frequencies (ω2) with tip ass ratio, η = 0
(k)
ω2 V=0V
ω2 V=100V
Δ% ω2 V=100V
ω2 V=500V
Δ% ω2 V=500V
ω2 V=1000V
Δ% ω2 V=1000V
0.8 4.531 4.528 0.05 4.522 0.2 4.513 0.39
0.4 4.615 4.613 0.04 4.607 0.18 4.598 0.36 0 4.694 4.693 0.03 4.686 0.16 4.679 0.36 -1 4.875 4.874 0.02 4.869 0.13 4.862 0.27
-6 5.545 5.544 0.02 5.541 0.07 5.537 0.14 -10 5.924 5.923 0.024 5.921 0.05 5.918 0.10
Figure A1 1: Natural frequency vs axial load: Tip mass ratio (η = 0)
Table A1 2: 2nd Mode frequencies (ω2) with tip ass ratio, η = 0.1
(k)
ω2 V=0V
ω2 V=100V
Δ% ω2 V=100V
ω2 V=500V
Δ% ω2 V=500V
ω2 V=1000V
Δ% ω2 V=1000V
8 4.26 4.259 0.03 4.254 0.14 4.248 0.27 0.4 4.331 4.330 0.02 4.326 0.12 4.320 0.24
0 4.400 4.398 0.02 4.394 0.12 4.389 0.24 -1 4.557 4.556 0.01 4.553 0.1 4.548 0.20 -6 5.165 5.165 0.01 5.162 0.06 5.159 0.12
-10 5.524 5.523 0.01 5.521 0.05 5.519 0.09
Figure A1 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1)

173
Table A1 3: 2nd Mode frequencies (ω2) with tip ass ratio, η = 1
(k) ω2 V=0V
ω2 V=100V
Δ% ω2 V=100V
ω2 V=500V
Δ% ω2 V=500V
ω2 V=1000V
Δ% ω2 V=1000V
0.8 3.925 3.925 0.01 3.924 0.04 3.922 0.07 0.4 3.979 3.979 0.004 3.978 0.03 3.977 0.06
0 4.0311 4.031 0.01 4.030 0.03 4.029 0.06 -1 4.153 4.153 0.01 4.152 0.03 4.151 0.06 -6 4.639 4.638 0.01 4.638 0.03 4.637 0.05
-10 4.937 4.936 0.01 4.936 0.02 4.935 0.04
Figure A1 3: Natural frequency vs axial load: Tip mass ratio (η = 1)
Table A1 4: 2nd Mode frequencies (ω2) with tip ass ratio, η = 5
(k) ω2 V=0V
ω2 V=100V
Δ% ω2 V=100V
ω2 V=500V
Δ% ω2 V=500V
ω2 V=1000V
Δ% ω2 V=1000V
0.8 3.851 3.850 0.01 3.850 0.02 3.850 0.03 0.4 3.901 3.901 -0.004 3.901 002 3.901 0.01
0 3.950 3.950 0.001 3.950 0.01 3.949 0.01 -1 4.064 4.064 -0.003 4.064 0.01 4.064 0.01 -6 4.523 4.522 0.01 4.522 0.01 4.522 0.02
-10 4.805 4.805 0.0004 4.805 0.004 4.805 0.01
Figure A1 4: Natural frequency vs axial load: Tip mass ratio (η = 5)

174
Table A1 5: 2nd Mode frequencies (ω2) with tip ass ratio, η = 10
(k) ω2 V=0V
ω2 V=100V
Δ% ω2 V=100V
ω2 V=500V
Δ% ω2 V=500V
ω2 V=1000V
Δ% ω2 V=1000V
0.8 3.840 3.840 -0.0004 3.840 0.01 3.840 0.01 0.4 3.890 3.890 0.004 3.890 0.01 3.890 0.01
0 3.938 3.938 -0.01 3.938 -0.01 3.9381 0.01 -1 4.052 4.052 0.01 4.052 0.01 4.051 0.01 -6 4.506 4.506 -0.0004 4.506 0.004 4.506 0.003
-10 4.787 4.787 -0.001 4.787 0.003 4.787 0.002
Figure A1 5: Natural frequency vs axial load: Tip mass ratio (η = 10)

175
A2. Third natural frequencies.
Table A2 1: 3rd Mode frequencies (ω3) with tip ass ratio, η = 0
(k) ω3 V=0V
ω3 V=100V
Δ% ω3 V=100V
ω3 V=500V
Δ% ω3 V=500V
ω3 V=1000V
Δ% ω3 V=1000V
0.8 7.775 7.774 0.01 7.772 0.04 7.769 0.07 0.4 7.815 7.815 0.01 7.812 0.03 7.810 0.07
0 7.855 7.854 0.01 7.852 0.04 7.849 0.07 -1 7.951 7.951 0.002 7.949 0.03 7.940 0.06 -6 8.386 8.386 0.005 8.384 0.02 8.382 0.05
-10 8.687 8.687 0.004 8.685 0.02 8.683 0.04
Figure A2 1: Natural frequency vs axial load: Tip mass ratio (η = 0)
Table A2 2: 3rd Mode frequencies (ω3) with tip ass ratio, η = 0.1
(k) ω3 V=0V
ω3 V=100V
Δ% ω3 V=100V
ω3 V=500V
Δ% ω3 V=500V
ω3 V=1000V
Δ% ω3 V=1000V
0.8 7.382 7.382 0.01 7.380 0.02 7.379 0.04 0.4 7.417 7.416 0.01 7.415 0.02 7.414 0.04
0 7.451 7.451 0.003 7.450 0.02 7.448 0.04 -1 7.535 7.535 0.003 7.534 0.0 7.532 0.04 -6 7.919 7.919 0.003 7.918 0.02 7.916 0.03
-10 8.191 8.190 0.01 8.189 0.02 8.188 0.03
Figure A2 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1)

176
Table A2 3: 3rd Mode frequencies (ω3) with tip ass ratio, η = 1
(k) ω3 V=0V
ω3 V=100V
Δ% ω3 V=100V
ω3 V=500V
Δ% ω3 V=500V
ω3 V=1000V
Δ% ω3 V=1000V
0.8 7.073 7.072 0.002 7.072 0.005 7.072 0.008 0.4 7.103 7.103 -0.006 7.103 -0.003 7.104 0.001
0 7.134 7.134 -0.001 7.134 0.001 7.134 0.004 -1 7.209 7.209 -0.001 7.209 0.001 7.209 0.004 -6 7.553 7.553 0.003 7.553 0.005 7.552 0.008
-10 7.797 7.797 -6E-04 7.797 0.001 7.797 0.004
Figure A2 3: Natural frequency vs axial load: Tip mass ratio (η = 1)
Table A2 4: 3rd Mode frequencies (ω3) with tip ass ratio, η = 5
(k) ω3 V=0V
ω3 V=100V
Δ% ω3 V=100V
ω3 V=500V
Δ% ω3 V=500V
ω3 V=1000V
Δ% ω3 V=1000V
0.8 7.022 7.022 -1E-04 7.022 0.0004 7.022 0.0011 0.4 7.052 7.052 0.0005 7.052 0.001 7.052 0.0017
0 7.083 7.083 -4E-04 7.082 0.0001 7.082 0.0008 -1 7.157 7.157 -3E-04 7.156 0.0002 7.156 0.0009 -6 7.496 7.496 -7E-04 7.496 -3E-04 7.495 0.0002
-10 7.737 7.737 -3E-05 7.737 0.0003 7.737 0.0008
Figure A2 4: Natural frequency vs axial load: Tip mass ratio (η = 5)

177
Table A2 5: 3rd Mode frequencies (ω3) with tip ass ratio, η = 10
(k) ω3 V=0V
ω3 V=100V
Δ% ω3 V=100V
ω3 V=500V
Δ% ω3 V=500V
ω3 V=1000V
Δ% ω3 V=1000V
0.8 7.015 7.015 0.0001 7.015 0.0004 7.015 0.0007 0.4 7.045 7.054 -0.12 7.045 0.0003 7.045 0.0006
0 7.076 7.076 0.01 7.076 0.0058 7.076 0.006 -1 7.149 7.149 -0.01 7.149 -0.006 7.149 -0.006 -6 7.488 7.488 0.001 7.488 0.0008 7.488 0.001
-10 7.729 7.729 0.01 7.729 0.005 7.729 0.006
Figure A2 5: Natural frequency vs axial load: Tip mass ratio (η = 10)

178
A3. Fourth natural frequencies.
Table A3 1: 4th Mode frequencies (ω4) with tip ass ratio, η = 0
(k) ω4 V=0V
ω4 V=100V
Δ% ω4 V=100V
ω4 V=500V
Δ% ω4 V=500V
ω4 V=1000V
Δ% ω4 V=1000V
0.8 10.942 10.942 -0 10.941 0.01 10.939 0.02
0.4 10.969 10.969 0.002 10.968 0.01 10.966 0.02
0 10.996 10.995 0.007 10.994 0.02 10.993 0.03
-1 11.060 11.061 -0.01 11.060 0.001 11.059 0.01
-6 11.373 11.373 0.002 11.372 0.01 11.371 0.02
-10 11.600 11.604 -0.04 11.603 -0.03 11.602 -0.02
Figure A3 1: Natural frequency vs axial load: Tip mass ratio (η = 0)
Table A3 2: 4th Mode frequencies (ω4) with tip ass ratio, η = 0.1
Figure A3 2: Natural frequency vs axial load: Tip mass ratio (η = 0.1)
(k) ω4 V=0V
ω4 V=100V
Δ% ω4 V=100V
ω4 V=500V
Δ% ω4 V=500V
ω4 V=1000V
Δ% ω4 V=1000V
0.8 10.475 10.475 0.001 10.474 0.005 10.474 0.01
0.4 10.498 10.492 0.06 10.498 0.005 10.497 0.01
0 10.520 10.522 -0.02 10.521 -0.01 10.521 -0.006
-1 10.580 10.580 0.004 10.579 0.008 10.579 0.01
-6 10.856 10.856 0.001 10.856 0.005 10.855 0.01
-10 11.060 11.063 -0.03 11.063 -0.03 11.062 -0.02

179
Table A3 3: 4th Mode frequencies (ω4) with tip ass ratio, η = 1
(k) ω4 V=0V
ω4 V=100V
Δ% ω4 V=100V
ω4 V=500V
Δ% ω4 V=500V
ω4 V=1000V
Δ% ω4 V=1000V
0.8 10.212 10.212 -0 10.212 0.0006 10.212 0.001
0.4 10.235 10.235 2E-04 10.235 0.0008 10.234 0.002
0 10.260 10.257 0.033 10.257 0.03 10.256 0.03
-1 10.310 10.311 -0.01 10.311 -0.01 10.311 -0.01
-6 10.571 10.571 3E-04 10.571 0.0009 10.571 0.002
-10 10.770 10.766 0.04 10.766 0.04 10.766 0.04
Figure A3 3: Natural frequency vs axial load: Tip mass ratio (η = 1)
Table A3 4: 4th Mode frequencies (ω4) with tip ass ratio, η = 5
(k) ω4 V=0V
ω4 V=100V
Δ% ω4 V=100V
ω4 V=500V
Δ% ω4 V=500V
ω4 V=1000V
Δ% ω4 V=1000V
0.8 10.176 10.176 -0 10.176 -6E-05 10.176 8.8E-05
0.4 10.198 10.198 4E-04 10.198 0.0005 10.198 0.0007
0 10.220 10.220 4E-04 10.220 0.0005 10.220 0.0006
-1 10.274 10.274 -0 10.274 1E-04 10.274 0.0002
-6 10.533 10.533 1E-04 10.533 0.0002 10.533 0.0004
-10 10.727 10.726 4E-04 10.726 0.0006 10.726 0.0007
Figure A3 4: Natural frequency vs axial load: Tip mass ratio (η = 5)

180
Table A3 5: 4th Mode frequencies (ω4) with tip ass ratio, η = 10
(k) ω4 V=0V
ω4 V=100V
Δ% ω4 V=100V
ω4 V=500V
Δ% ω4 V=500V
ω4 V=1000V
Δ% ω4 V=1000V
0.8 10.171 10.171 0.00001 10.171 0.00007 10.171 0.0002
0.4 10.193 10.193 0.00002 10.193 0.00007 10.193 0.0002
0 10.215 10.215 0.00001 10.215 0.00007 10.215 0.0002
-1 10.269 10.269 0.00002 10.269 0.00007 10.269 0.0001
-6 10.528 10.528 0.000009 10.528 0.00005 10.528 0.0001
-10 10.721 10.721 0.000009 10.721 0.00006 10.721 0.0001
Figure A3 5: Natural frequency vs axial load: Tip mass ratio (η = 10)

181
B1. Natural frequencies with b1 = L/10. Table B1 1: Natural frequencies of a beam with a concentrated tip
mass (b1 = L/10) including the effects rotary inertia at 0V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.2472 0.9992 0.6206 0.4195 0.3533 +0.4 1.6629 1.3115 0.8096 0.5467 0.4603 +0.2 1.7800 1.4073 0.8664 0.5847 0.4922
0 1.8751 1.4860 0.9123 0.6153 0.5180 -0.4 2.0256 1.6121 0.9844 0.6634 0.5584 -1 2.1943 1.7552 1.0639 0.7162 0.6027 -2 2.3972 1.9293 1.1569 0.7776 0.6543
Figure B1 1: Changes in the natural frequency vs axial load and tip
mass (b1 = L/10)
Table B1 2: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including the effects rotary inertia at 100V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.2442 0.9748 0.6054 0.4093 0.3446 +0.4 1.6509 1.3009 0.8031 0.5223 0.4566 +0.2 1.7706 1.3988 0.8611 0.5811 0.4892
0 1.8675 1.4788 0.9079 0.6124 0.5155 -0.4 2.0201 1.6064 0.9810 0.6611 0.5564 -1 2.1903 1.7508 1.0613 0.7144 0.6012 -2 2.3946 1.9260 1.1550 0.7763 0.6532
Figure B1 2: Changes in the natural frequency vs axial load and tip
mass (b1 = L/10)
Axial Load Ratio
Axial Load Ratio

182
Table B1 3: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including the effects rotary inertia at 500V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.0929 0.8532 0.5298 0.3582 0.3017 +0.4 1.5995 1.2561 0.7755 0.5237 0.4409 +0.2 1.7313 1.3632 0.8393 0.5664 0.4769
0 1.8356 1.4488 0.8896 0.6001 0.5052 -0.4 1.9971 1.5831 0.9669 0.6517 0.5485 -1 2.1743 1.7329 1.0507 0.7073 0.5953 -2 2.3843 1.9125 1.1473 0.7712 0.6489
Figure B1 3: Changes in the natural frequency vs axial load and tip
mass (b1 = L/10)
Table B1 4: Natural frequencies of a beam with a concentrated tip mass (b1 = L/10) including the effects rotary inertia at 1000V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 0.6597 0.5127 0.3184 0.2153 0.1813 +0.4 1.5258 1.1932 0.7367 0.4975 0.4189 +0.2 1.6770 1.3149 0.8096 0.5465 0.4601
0 1.7925 1.4091 0.8652 0.5837 0.4914 -0.4 1.9666 1.5529 0.9487 0.6394 0.5382 -1 2.1534 1.7100 1.0371 0.6983 0.5877 -2 2.3709 1.8956 1.1376 0.7648 0.6435
Figure B1 4: Changes in the natural frequency vs axial load and tip
mass (b1 = L/10)
Axial Load Ratio
Axial Load Ratio

183
B2. Natural frequencies with b1 = L/5. Table B2 1: Natural frequencies of a beam with a concentrated tip
mass (b1 = L/5) including the effects rotary inertia at 0V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.2472 0.9838 0.6065 0.4096 0.3449 +0.4 1.6629 1.2910 0.7915 0.5340 0.4495 +0.2 1.7800 1.3853 0.8470 0.5712 0.4808
0 1.8751 1.4627 0.8920 0.6012 0.5061 -0.4 2.0256 1.5865 0.9628 0.6484 0.5457 -1 2.1943 1.7271 1.0410 0.7004 0.5894 -2 2.3972 1.8978 1.1328 0.7612 0.6404
Figure B2 1: Changes in the natural frequency vs axial load and tip
mass (b1 = L/5)
Table B2 2: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including the effects rotary inertia at 100V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.2442 0.9597 0.5917 0.3996 0.3365 +0.4 1.6509 1.2806 0.7851 0.5297 0.4459 +0.2 1.7706 1.3769 0.8419 0.5677 0.4779
0 1.8675 1.4555 0.8877 0.5983 0.5036 -0.4 2.0201 1.5809 0.9594 0.6462 0.5438 -1 2.1903 1.7227 1.0384 0.6987 0.5880 -2 2.3946 1.8945 1.1309 0.7599 0.6394
Figure B2 2: Changes in the natural frequency vs axial load and tip
mass (b1 = L/5)
Axial Load Ratio
Axial Load Ratio

184
Table B2 3: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including the effects rotary inertia at 500V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 1.0929 0.8400 0.5178 0.3498 0.2945 +0.4 1.5995 1.2365 0.7581 0.5115 0.4306 +0.2 1.7313 1.3418 0.8205 0.5533 0.4658
0 1.8356 1.4260 0.8698 0.5863 0.4935 -0.4 1.9971 1.5580 0.9457 0.6370 0.5361 -1 2.1743 1.7051 1.0280 0.6917 0.5821 -2 2.3843 1.8813 1.1233 0.7549 0.6352
Figure B2 3: Changes in the natural frequency vs axial load and tip
mass (b1 = L/5)
Table B2 4: Natural frequencies of a beam with a concentrated tip mass (b1 = L/5) including the effects rotary inertia at 1000V.
Axial load Ratio (k) η = 0 η = 0.1 η = 1 η = 5 η = 10
+0.8 0.6597 0.5047 0.3112 0.2102 0.1770 +0.4 1.5258 1.1745 0.7201 0.4859 0.4091 +0.2 1.6770 1.2943 0.7915 0.5338 0.4494
0 1.7925 1.3868 0.8450 0.5703 0.4801 -0.4 1.9666 1.5282 0.9278 0.6250 0.5260 -1 2.1534 1.6825 1.0147 0.6828 0.5746 -2 2.3709 1.8646 1.1137 0.7485 0.6298
Figure B2 4: Changes in the natural frequency vs axial load and tip
mass (b1 = L/5)
Axial Load Ratio
Axial Load Ratio

185
C1. Mode shapes 0V and 1000V for η = 0 ω1 ω2 ω3 ω4
Figure C1 1: First four mode shapes for k = +0.8
Figure C1 2: .First four mode shapes for k = 0

186
Figure C1 3: First four mode shapes for k = -1
Figure C1 4: First four mode shapes k = -2

187
C2. Mode shapes for different tip masses k = 0
Figure C2 1: Fundamental mode shapes
Figure C2 2: Second mode shapes
Figure C2 3: Third mode shapes
Figure C2 4: Fourth mode shapes

188