Embed Size (px)
Citation preview

Final Proposal: Lunar Exploration Transportation System
(LETS)
IPT 2008
Submitted By:
April 22, 2008
Submitted To:Dr. P.J. Benfield and Dr. Matthew Turner
Department of Mechanical and Aerospace EngineeringThe University of Alabama in Huntsville
[email protected]@uah.edu

Contributors
Project Office Nicholas CaseSystems Engineering Morris MorellGuidance, Navigation & Control Travis MorrisThermal Systems Greg BarnettPower Systems Adam GarnickPower Systems Katherine TylerPayload John GroseStructures Tommy StewartCommunications Adam FanningConcept of Operations Julius RichardsonTechnical Editor Eric Brown
Participating AgenciesThe University of Alabama in Huntsville
National Aeronautics Space Administration
Southern University Ecole Superieure des Techniques Aeronautiques et de Construction (ESTACA)

Executive Summary
English The need for National Aeronautics and Space Administration (NASA) to return back to the Moon has created a desire for robotic missions to preempt the arrival of manned missions. The Lunar Precursor Robotic Program was created to develop a series of robotic spacecraft to provide valuable information to assist NASA in returning to the Moon, develop a lunar outpost, and travel to Mars. Daedalus is a concept for the proposed Lunar Exploration Transportation System to be developed for NASA. Daedalus uses off-the-shelf components and existing technology to provide NASA with a robust, inexpensive, and long-lasting design with the capability of visiting several lunar locations. The Daedalus structure is based on the Viking Mars Lander design with an additional landing leg for increased stability. The power system uses a combination of solar cell and lithium-ion batteries. The guidance, navigation, and control system uses off-the-shelf components previously developed for several planetary landers, as well as technology developed for cruise missile use. Lunar penetrators are used to achieve most of the scientific goals for the mission. The penetrators are based on the LUNAR-A penetrator design developed for a defunct lunar mission, which was spent 10 years in development. The Daedalus system is easily modified and capable of meeting the launch requirements of the mission.
French Le besoin de la NASA de retourner de nouveau à la lune a créé un besoin des missions robotiques d'acquérir l'arrivée des missions homme. Le programme robotique de précurseur lunaire a été créé pour développer une série de vaisseau spatial robotique pour fournir des informations valables à la NASA d'aide pour retourner à la lune, pour développer un avant-poste lunaire, et pour voyager à Mars. Daedalus est concept pour que le système lunaire proposé de transport d'exploration soit développé pour la NASA. Daedalus emploie les composants disponibles immédiatement et la technologie existante pour fournir à la NASA une conception robuste, peu coûteuse, et durable avec les possibilités de visiter plusieurs endroits lunaires. La structure de Daedalus est basée outre de la conception de Viking Mars Lander avec une addition débarquant la jambe pour la stabilité accrue. Le système d'alimentation emploie une combinaison des batteries de pile solaire et de lithium-ion. Les conseils, la navigation, et le système de commande emploient les composants disponibles immédiatement développés pour plusieurs landers planétaires, comme la technologie développée pour l'usage de missile de croisière. Des pénétrateurs lunaires sont employés pour réaliser la plupart des buts scientifiques pour la mission. Les pénétrateurs que basé sur la conception Lunaire-Un de pénétrateur a développés pour une mission lunaire ancienne. Le système de Daedalus est facilement modifié, et capable de répondre aux exigences de lancement de la mission.

LETS Compliance List
Specification CDD Location Proposal Location
Atlas V-401 EPF shroud configuration with a total landed mass of 997.4 kg
2.1 1.4.2, 2.7.1, Table 6 in App B
64.6 kg of the total landed mass is devoted to the propulsion system dry mass
2.1.1 Table 6 in App B
Propellant shall be housed in two spherical propellant tanks, each 0.55 m in diameter
2.1.2 Dimensional props and structures
Helium shall be housed in 2 spherical tanks, each 0.4 m in diameter
2.1.2 2.7.1Dimensional
props and structures
Two (2) MR-80B monopropellant liquid rocket engines 2.1.3 Dimensional props and structures
Twelve (12) MR-106 monopropellant thrusters 2.1.4First mission to be at a polar location 2.2 2.5.2Capability to land at other lunar locations 2.3 2.8, 2.10.3Launch to the Moon NLT September 30, 2012 2.5 2.4.1Capability to move on the surface 2.6 2.8Survive for one year on the surface of the Moon 2.7 2.4.2, 2.6.2Meet both the Science Mission Directorate (SMD) and the Exploration Systems Mission Directorate (ESMD) objectives
2.9 2.8, 1.5
Landing at a slope of 12 degrees (slope between highest elevated leg of landing gear and lowest elevated leg)
2.11 2.5.2, 2.10.4
G-loads during lunar landing not to exceed the worst case design loads for any other phase of the mission (launch to terminal descent)
2.12 2.7.2
Table of Contents

List of Figures..........................................................................................................................vi
List of Tables..........................................................................................................................vii
Acronyms and Symbols........................................................................................................viii
IPT Final Report: Feasibility of Lunar Exploration Transportation System....................1
1.0 Daedalus........................................................................................................................1
1.1 Overview...................................................................................................................1
1.2 The Need...................................................................................................................2
1.3 The Requirements....................................................................................................21.3.1 Customer Requirements.....................................................................................21.3.2 Concept Design Constraints...............................................................................31.3.3 Figures of Merit (FOM)............................................................................................31.3.4 Surface Objectives.............................................................................................3
1.4 The Solution..............................................................................................................41.4.1 Concept Overview.............................................................................................41.4.2 Dimensional Properties......................................................................................61.4.3 Operations Scenarios.........................................................................................7
1.5 The Performance......................................................................................................8
1.6 The Implementation.................................................................................................8
2.0 Technical Description of Methods Used....................................................................9
2.1 Overview...................................................................................................................9
2.2 Project Office............................................................................................................9
2.3 Systems Engineering..............................................................................................10
2.4 Power.......................................................................................................................132.4.1 Methods and Assumptions...............................................................................132.4.2 Results and Discussions...................................................................................13
2.5 Guidance, Navigation, and Control (GN&C)......................................................152.5.1 Methods and Assumptions...............................................................................152.5.2 Results and Discussions...................................................................................152.5.3 Operations........................................................................................................17
2.6 Thermal...................................................................................................................172.6.1 Methods and Assumptions...............................................................................172.6.2 Results and Discussions...................................................................................18
2.7 Structures................................................................................................................202.7.1 Methods and Assumptions...............................................................................202.7.2 Results and Discussions...................................................................................20
2.8 Payload....................................................................................................................212.8.1 Lunar Penetrator Exploration System (LPES).................................................212.8.2 Single Site Science...........................................................................................25

2.8.3 Results and Discussion....................................................................................262.8.3 Sample Return Vehicle (SRV).........................................................................262.8.2.1 Methods and Assumptions...............................................................................262.8.2.2 Results and Discussions...................................................................................27
2.9 Communication......................................................................................................282.9.1 Methods and Assumptions...............................................................................282.9.2 Results and Discussion....................................................................................302.9.3 Operations........................................................................................................322.9.4 Data Handling and Storage..............................................................................32
2.10 Concept of Operations...............................................................................................332.10.1 Overview..........................................................................................................332.10.2 LRO Concept of Operations............................................................................332.10.3 LPES Concept of Operations...........................................................................342.10.4 Lander Concept of Operations.........................................................................34
2.11 Systems Interactions..........................................................................................36
3.0 Implementation Issues...............................................................................................37
3.1 Schedule........................................................................................................................37
3.2 Hardware......................................................................................................................38
4.0 Company Capabilities...............................................................................................38
4.1 Company Overview.....................................................................................................38
4.2 Personnel Description..................................................................................................39
5.0 Summary and Conclusions.......................................................................................40
6.0 Recommendations......................................................................................................43
Appendix A - Concept Description Document................................................................44
Appendix B - Project Office..............................................................................................47
Appendix C - Systems Engineering..................................................................................49
Appendix D - Power...........................................................................................................50
Appendix E - Guidance, Navigation, and Control..........................................................54
Appendix F - Thermal.......................................................................................................58
Appendix G - Structures....................................................................................................62
Appendix H - Payload........................................................................................................70
Appendix I - Communications........................................................................................72
Appendix J - Concept of Operations...............................................................................85
Appendix K - Level II Requirements...............................................................................85
References:...............................................................................................................................90

List of Figures
Figure 1: Atlas V-401 Payload Fairing Options........................................................................6Figure 2: Information Flow Chart............................................................................................12Figure 3: Power Control Unit..................................................................................................15Figure 4: LPES Proposed Landing Locations..........................................................................24Figure 5: Daedalus Sample Return Vehicle.............................................................................28Figure 6: High Gain Antenna Design Plot...............................................................................31Figure 7: Daedalus Concept of Operations..............................................................................36Figure 8: Design Check of Vertical Member Using Von Mises Stress Criterion....................63Figure 9: Design Check of Horizontal Member using Von Mises Stress Criterion................64Figure 10: Design Check of Landing Leg Strut Using Von Mises Stress Criterion................65Figure 11: LPES Impact Velocity............................................................................................71Figure 12: LPES G-Force Calculation.....................................................................................71Figure 13: Daedalus Antenna Gain.........................................................................................76Figure 14-High Rate Transmitter.............................................................................................79Figure 15: High Rate Transmitter...........................................................................................80Figure 16: MER UHF System Specifications..........................................................................81

List of Tables
Table 1: Actual Mass Distribution.............................................................................................6Table 2: Final Concept Evaluation............................................................................................8Table 3: Engineering Summary...............................................................................................10Table 4: Thermal Control System Components.......................................................................18Table 5: LPES Requirements...................................................................................................22Table 6: Daedalus Single Site Scientific Instrumentation.......................................................26Table 7: Daedalus and LPES Communication Rates and Data Transfer.................................32Table 8: Daedalus Activity Plan..............................................................................................37Table 9: Initial Mass Estimates for Daedalus.........................................................................47Table 10: Initial Power Estimates for Daedalus......................................................................48Table 11: Material Properties For Materials Used in the Daedalus.........................................62Table 12: LPES Impact Velocity.............................................................................................70Table 13: Daedalus UHF Communication Components.........................................................78Table 14: Mass and Power for Ka System...............................................................................82Table 15: Mass and Power for UHF System..........................................................................82Table 16: Total Mass and Power for Communications System...............................................82

Acronyms and Symbols
Term DefinitionACS Attitude Control SystemAIAA American Institute of Aeronautics and AstronauticsCDD Concept Description DocumentConOps Concept of OperationsDSMAC Digital Scene Matching Area CorrelationESMD Exploration Systems Mission DirectorateFEA Finite Element AnalysisGN&C Guidance, Navigation, and ControlKbps Kilobits per secondLCROSS Lunar Crater Observation and Sensing SatelliteLETS Lunar Exploration Transportation SystemLiDAR Light Detection and RangingLPES Lunar Penetrator Exploration SystemLRO Lunar Reconnaissance OrbiterLROC Long Range Optical CamerasMB MegabytesMbps Megabits per secondMEMS IMU Micro Electro Mechanical Sensor Inertial Measurement UnitMER Mars Exploration RoversMLI Multi Layer InsulationMMH MonomethylhydrazineNASA National Aeronautics and Space AdministrationNTO Nitrogen TetroxideOSR Optical Surface ReflectorsPCU Power Control UnitRHU Radioisotope Heater UnitsRTG Radioisotope Thermoelectric GeneratorSMD Science Mission DirectorateSRG Stirling Radioisotope GeneratorSRV Sample Return VehicleTRL Technology Readiness LevelUHF Ultra High FrequencyVCHP Variable Conductance Heat PipesVRHU Variable Radioisotope Heater Units
ix

IPT Final Report: Feasibility of Lunar Exploration Transportation System
1.0 Daedalus
1.1 Overview Team LunaTech has created a vision for lunar exploration using the Daedalus system. The team conducted research on the evolution of robotic missions on Mars. The overall consensus is that a simple lander with science is sent to a prospective sight to collect data. Based on the research and data collected from the single lander, a lander with a mobility concept is sent to collect more science with greater detail and range than its predecessor. Next, multiple rovers are sent to maximize the data return and provide even more data than previous missions. Finally, a lander on wheels concept is sent to combine the mobility and lander into one function. Team LunaTech believes this expanding process is a good starting point for lunar exploration. It has been over 30 years since humans have had any measurable presence on the moon. Essentially NASA and the world are starting from the beginning to build extensive exploration architecture in a very limited timeframe. The Lunar Precursor Robotic Program at Marshall Space Flight Center in Huntsville, Alabama has already started this process with the LRO and LCROSS missions. These missions are providing a great starting point for the Daedalus system to build upon.
Using the Mars exploration timeline as a roadmap, and discussing the current mission objectives with several lunar experts, the team has come to conclusion that the most effective method of exploring the Moon is to start with a basic lander that will achieve all of the mission requirements, but leave room for more in-depth analysis to be done using future missions. This is the reasoning for the design of Daedalus. The Daedalus lander will accomplish all of the requirements for the mission at hand, but is adaptable for future missions. The Daedalus Vision is to use the design to continuously build upon the data collected for each mission. This will require Daedalus to be modified to achieve specific goals for different missions. Team LunaTech has designed Daedalus with this capability and functionality in mind.
The focus of this report is the Daedalus 1—a mission to Shackleton crater in the Lunar South Pole. The Daedalus lander will utilize a Lunar Penetrator Exploration System (LPES) to explore both permanently dark and lighted regions to measure for signs of H2O and H2. Also, the lander will conduct research that benefits both science and exploration programs for future missions. The LPES is based on the extensively tested LUNAR-A penetrator. All of the data collected using the LPES and the Daedalus lander should provide great detail of Lunar South Pole. The data collected could then be used to justify more funding to send the Daedalus 2 back to the South Pole with increased payload capability. The Daedalus 2 would utilize a robotic rover capable of visiting each of the sites studied by the LPES on the Daedalus 1 and explore them in greater detail. The rover could visit these sites of interest and conduct in situ analysis. The robotic rover has been designed by Southern University and will be available to integrate into the Daedalus system. Also, a Sample Return Vehicle (SRV) has been developed by ESTACA and could return a 1 kilogram sample back to Earth. IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
1

The robotic rover could collect an interesting sample from one of the sites characterized by LPES and deliver it back to Earth. This type of data return capability would very difficult for human exploration to achieve, because the cold temperatures of Shackelton Crater. The robotic rover and the SRV designs will be discussed in detail in this report, however, the focus of this report is the Daedalus 1 concept—Team LunaTech’s vision for the first sortie of a multi-mission lunar campaign—a traditional lander with penetrators concept.
Team LunaTech firmly believes that following the roadmap created in exploring Mars is the most efficient and most cost effective way to approach this difficult task of conducting systematic and thorough lunar exploration. Starting with a basic, yet powerful and adaptable lander, while building on the good design practices and valuable data will allow the Daedalus concept to evolve with each lunar mission and provide a low cost solution for the Lunar Precursor Robotic Program. This is the Vision of Daedalus, and the mission of Team LunaTech.
1.2 The NeedThe national Vision for Space Exploration calls for a permanent human presence on the Moon. Lunar Exploration Transportation System (LETS) is one of several missions designed to help sustain a permanent lunar base. The presence of water-ice is of particular interest and will be a key factor in establishing a permanent lunar base because, if found in extractable quantities, water-ice provides potable water, breathable oxygen, fuel cell reactants, and rocket propellants. Water is also an excellent working fluid and stores easily at room temperature. Hence, the availability of water is critical to sustaining a human presence on the Moon.
Besides water-ice, Daedalus will also directly measure the type, form, and distribution of subsurface volatiles. Lunar scientists believe that the characteristics of Shackleton crater allow for the volatiles to remain inside the crater. It is estimated that Shackleton crater is 80% in shadow, an important factor because the Sun would not have evaporated volatiles close to the lunar surface.
Daedalus will also be used to conduct site analysis for future human missions. The customer requires that Daedalus measure the lighting conditions at the landing site every 2 hours. Also, micrometeoroid flux is valuable data required by the customer. This data would allow NASA to fully characterize the environment of the landing site and apply that to possible use in the human exploration program.
1.3 The Requirements
1.3.1 Customer RequirementsThe following requirements were given by the customer as Level 1 Requirements. The LETS shall be designed to survive one year on the surface of the Moon and have a landed mass of 1450 kilograms with a margin of 100 kilograms. It LETS shall be designed for the first mission to be at a polar location with the capability to land at other lunar locations as well as move across the surface of the Moon. This is a requirement just in case there is a location of interest other than the mission sites that needs to be evaluated. The LETS will IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
2

launch to the Moon no later than September 30th of 2012. The design should minimize cost as much as possible.
The LETS shall survive the proposed concept of operations. It shall be able to meet the Exploration Systems Mission Directorate (ESMD) and the Science Mission Directorate (SMD) objectives. The LETS shall land at ± 100 meters 3 sigma of the predicted location and shall be capable of landing at a slope of 12 degrees. This is important so that the weight of the lander does not topple over due to the lunar terrain of the crater. The g-loads experienced during the lunar landing shall not exceed the worst case design loads for any other phase of the mission.
1.3.2 Concept Design ConstraintsThe following constraints are placed on the LETS design. The first is to be designed to interace with the Atlas V-401 Launch Vehicle per the Atlas Launch System Mission Planner's Guide, Rev 10a, January 2007, CLSB-0409-1109. The LETS systems shall also be designed to operate for one year, to survive the lunar environment at polar regions and equatorial regions, and survive the lunar cruise environment for up to 28 days. The design shall utilize off-the-shelf technology at a technology readiness level of 9. This will ensure the usability of the technology in the mission.
1.3.3 Figures of Merit (FOM)The following will be used to asses the LETS design concept. Some FOMs are the percentage of mass allocated to payload and power systems. There are also the ratios of objectives (SMD to ESMD) validation and the ratio of off-the-shelf to new development, which could minimize the cost of the design. One other FOM is getting the data into stakeholder’s hands versus the capability of the mission. Another important FOM is how many of the surface objectives were accomplished, such as single site goals, lighting conditions, micrometeorite flux, electrostatic dust levitation, mobility goals, and instrument package baselines.
1.3.4 Surface ObjectivesThese surface objectives mentioned above were provided by the customer. Each single site goal will evaluate the geologic context, which in turn will provide information about the lunar environment. The lighting conditions will also be assessed every 2 hours for one year as well as the electrostatic dust levitation that correlates with it. This will help determine if the electrostatic dust levitates due to the sunlight. Micrometeorite flux will also be determined.
Another surface objective deals with the mobility goals of the mission. The mission is to evaluate 20 sites, 15 in the permanent dark regions and 5 in the lighted regions. Each site is to be separated by at least 500 meters from each other. Each site takes 1 whole Earth day to acquire the minimal data and generates 300 megabytes of data. This data includes the composition, geotechnical properties and volatile content of the regolith. For a value added mission, geologic context information can be collected for all or a selected site. Another
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
3

value added mission can be to determine the vertical variation in volatile content at one or more sites.
The instrument package baselines are as follows. The package shall be a minimal volatile composition and geotechnical properties package, suitable for a penetrometer, surface-only, or down-bore package, with a weight of 3 kilograms. For the enhanced volatile species and elemental composition (e.g. GC-MS), add 5 kilograms. For the enhanced geologic characterization (multispectral imager + remote sensing instrument such as Mini-TES or Raman), add 5 kilograms.
1.4 The Solution
1.4.1 Concept OverviewTeam LunaTech utilized a systems engineering approach to solving the problem. In phase 2 of the design process, the team conducted research and created a trade tree of several possible solutions to the problem. Next, each subsystem created several parameters to justify the removal of options from the trade tree. Once the trade tree was pruned down, two alternatives, Daedalus and Lunar Prowler, were created from the trade study. The Daedalus concept was a traditional lander that utilizes the research and heritage of nearly all planetary landers. The Daedalus lander was outfitted with the Lunar Penetrator Exploration System as the mobility concept to satisfy the requirement of exploring 20 unique sites. The Lunar Prowler was a land-on-wheels concept that was based more on the upcoming Mars Science Laboratory (MSL). More research and analysis was conducted, and the Daedalus was selected.
The Daedalus concept is a high system performance, meets the basic requirements, and addresses the most possible mission complications. Daedalus was chosen from two concepts described and compared in the white paper. This design uses many off-the-shelf technologies that are currently used on several Mars landers and orbiters. The individual designs of each subsystem combine to create high system performance for the lander.
The Daedalus thermal control subsystem is a semi-passive system that incorporates variable radioisotope heater units (RHU), variable conductance heat pipes (VCHP), an aluminum cold plate/mounting plate, multi-layered insulation (MLI) blankets, thermal switches, solid-state controlled heaters, and other passive techniques. The thermal control subsystem is designed to control the environment inside the vehicle such that it remains at approximately 20 degrees Celsius. The various components of the thermal control system function individually but are integrated together to achieve sufficient heat transfer to and from the controlled environment when appropriate. The temperature of the internal compartment of the vehicle is dependent upon the operating temperature range of the lithium-ion batteries. This thermal control subsystem is designed to provide enough heat to the internal compartment of the spacecraft during the 14 day dark (cold) periods and dissipate a sufficient amount of heat during the 14 day light (hot) periods.
The Daedalus power system is to be comprised of solar cells, lithium-ion batteries, and a power management system. The system has been designed to operate at a 14 day cycle, with IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
4

14 days of light and 14 days of dark. The solar cells will be the main power source during the lighted periods. This is due to the available supply of sunlight energy. Not only will the solar cells power the Daedalus, but they will also charge the lithium-ion batteries. At the end of the lighted periods, the batteries will be fully charged and ready for operation. During the dark periods, the power management system will then switch the main power source to the lithium-ion batteries. Each subsystem has been divided into amounts of time of operation during the dark. The thermal, power, and communications subsystems were in operation the most during the dark periods. All other systems were dormant. The subsystems that were on were only in operation for the minimal amount of time to send data, heat the thermal compartment, and provide power when needed.
The Daedalus Guidance, Navigation, and Control (GN&C) system will be responsible for the vehicle’s terminal descent landing sequence beginning at 5 kilometers altitude. It will guide the vehicle to 2 predetermined penetrator launch locations on its way down, and then sit the vehicle down softly and safely on the lunar surface. Sensors for the system include several inertia measurement units (IMUs), two Light Direction and Ranging (LiDAR) sensors, and two Digital Scene Matching Area Correlation (DSMAC) long range digital cameras. The system will use existing cruise missile technology to provide extremely high accuracy. Hazard avoidance will also be incorporated into the design. Controls will consist of 2 Aerojet main engines and 16 smaller Aerojet engines that make up the Attitude Control System (ACS). The main engines will be responsible for controlling the descent rate to 5 kilometers in 3 minutes, while the ACS will keep the vehicle in a horizontal state and provide the vehicle with a large horizontal movement after the first penetrator launch. The whole system will provide a completely autonomous landing sequence, requiring no human control. All paths, checkpoints, and landing zones will be determined before launch from Earth, and will be based on accurate data from the Lunar Reconnaissance Orbiter (LRO) that will be in orbit at the time of the mission.
The Daedalus communications system was based on the communications architecture for the Mars Exploration Rovers (MER). The simple design and redundancy lent itself well to the design of the Daedalus communications architecture. Use of the LRO as a communications satellite removed a major obstacle in the ability to transmit data from the lunar South Pole. Daedalus uses a Ka-bad transmitter combined with a directional high gain antenna to transmit directly to the orbiting LRO. The transmission rate of data from Daedalus to LRO is assumed to be 100 Megabits per second. This is based on the design of the MER Ka-band system and the assumed transmit capability of the LRO. Daedalus will receive data from mission control via an Ultra High Frequency (UHF) receiver connected to a low gain antenna. The UHF system is also based on the MER architecture. The transmission rate of data to Daedalus is believed to be 8 kilobits per second. The Daedalus communications architecture provides a dual-redundant system to effectively transmit all the necessary data back to the customer.
The Daedalus structural design is divided into the landing frame and the components compartment. The frame is the primary load-bearing structure for the lander during launch and landing loading. This requires the design to be strong and have flexible material to handle several environments and loading conditions. To address this, the frame is IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
5

constructed using 6061-T6 Aluminum because of its light-weight and rigid properties. Also, some components were constructed out of aircraft-grade Titanium. This was to increase the strength in critical load-bearing areas. The use of titanium was kept to a minimum in an effort to minimize cost across the design. The design allows Daedalus to withstand g-forces up to 7.1 g’s, well above the expected maximum g-load of 5.1 g’s.
1.4.2 Dimensional PropertiesDuring the design, the requirement of fitting inside the Atlas V-401 shroud was always considered. To begin the design, LunaTech reviewed the Atlas Mission Planner’s Guide. The Concept Description Document (CDD) required the use of the Atlas V-401 4-m EPF shroud supplied in Appendix A. The team designed around these restrictions and ensured that Daedalus would integrate correctly with the payload fairing and other Atlas systems. The Atlas V-401 4-m EPF shroud allows for housing of an object 3.75 meters wide by 4.01 meters tall in the cylindrical section with the largest diameter, as shown in Figure 1. Additional volume is also available to accommodate the Daedalus lander into the payload fairing. The base volume for Daedalus is X and the vertical volume is X. The maximum mass allowable for LETS was determined to be 997.4 kg. The actual mass of Daedalus was determined to be X, and the actual mass allowance for Daedalus is shown in table 1.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
6

Figure 1: Atlas V-401 Payload Fairing Options
Table 1: Actual Mass Distribution
System Component Mass %Structures
Beams XPlate X
Compartments XLegs XTotal 170
ThermalHeat Pipes XHeat Pump X
Heat Switches XMLI XTotal 34.9
PowerSolar Cells 42.29Batteries 42.21
Distribution 48.45
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
7

Total 132.95GN&C
Total 17Communications
UHF Transceiver 1.90
UHF Other 1.30Ka
Transmitter 2.30
Ka Other 10.50Total 17
PayloadLPES 308
Single Site Science 62.1
Total 370.1Propulsion Dry Mass + Helium 66.6
MarginTOTAL 816.6 100.00
1.4.3 Operations ScenariosThe operations scenarios for Daedalus will consist of: pre-launch, launch, cruise, descent, landing, and scientific mission. The focus of this project and this report is on the descent, landing, and mission phases, however the team considered the pre-launch, launch and cruise phases in the overall design.
The concept of operations (ConOps) for the Daedalus lander will depend on the interactions of three main components: the Lunar Reconnaissance Orbiter (LRO), Lunar Penetrator Exploration System (LPES), and Daedalus. These require the interactions of all subsystems on Daedalus to work effectively to achieve the goals of the mission. The LRO ConOps will be essential to receiving and transmitting all data to and from Daedalus and LPES, as well as provide key images of the landing sites for both the penetrators and the lander. The lander ConOps will consist of descent, penetrator deployment, landing, and the 1 year science mission. The LPES ConOps will consist of deployment, landing, and data collection.
1.5 The Performance
Table 2: Final Concept Evaluation
Figure of Merit Goal DesignNumber of surface objectives 15 samples in permanent 16 samples in permanent IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
8

accomplished dark and 5 samples in lighted terrain
dark and 5 samples in lighted terrain
Percentage of mass allocated to payload Higher is better 40 % of Dry Mass
Ratio of objectives (SMD to ESMD) validation 2 to 1
Efficiency of getting data in stakeholders hands vs. capability of mission
Higher is better
Percentage of mass allocated to power system Lower is better 17% of Dry Mass
Ratio of off-the-shelf hardware to new
development hardwareHigher is better
1.6 The ImplementationTo accomplish all goals set forth by the requirements mentioned previously, Daedalus uses several systems. Each of subsystem of Daedalus needs to be incorporated correctly for the system to function as one unit.
The communications and thermal systems have very little integration issues due to the many parts available for theses applications. However, both communications and thermal systems impact nearly all systems and have to be accounted for in each design. The structures, power, and GN&C, however are more specific and are geared more toward the mission alone. The structure is made of high strength aluminum and titanium and requires custom machining and fabrication specific to the mission. The penetrator launchers are also unique to Daedalus and require the testing of the system and components prior to launch. To meet the mobility requirements for the mission, Daedalus will use penetrators to collect 22 samples. The penetrators are preloaded with springs on the under side of the lander and will be deployed upon descent. Because the Daedalus will land in a lighted region, the lander utilizes the use of solar panels and batteries for its power requirements. During the light periods, the solar cells will be in operation. During the dark periods, the Daedalus will run off batteries and will shut down all but necessary systems such as communications and thermal, and resume full operation when light is available.
2.0 Technical Description of Methods Used
2.1 OverviewTeam LunaTech used a systems engineering approach to the problem given by the customer. Also, the team utilized the experience learned in the following classes: Spacecraft Design, Fluid Mechanics, Electrical Circuits, Heat Transfer, Thermodynamics, Aerospace Structures, Statics and Dynamics, and System Dynamics. Unfortunately, there is not a class on designing a lunar lander; therefore the team had to gain a lot of experience as the project progressed. Fortunately, the team had the opportunity to utilize the knowledge of the
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
9

technical mentors for the project. The mentors were a great help to the team, and were almost always available for consultation.
2.2 Project OfficeThe project office was in charge of developing an approach plan for each phase for the team. The approach plan included creating a schedule of all deadlines and items needed for the entire project life. Also, the project office developed the initial power and mass budgets for the entire system. This allowed the subsystem leads to effectively develop their designs. The project office also served as a liaison between the team and the customer. This helped ensure that the design was meeting all of the expectations of the customer.
Deadlines are set to allow a margin of at least 2 days before a review must be presented to the customer and the review panel in order to have all of the editing finished. Generally, there are several deadlines set to ensure there is more than 2 days in order to submit the best possible finished product. The deadlines are also set to allow editing time before drafts are submitted for review to ensure that steady progress is made throughout the planned period and the project office can take a more hands off role and reduce the amount of micro-managing taking place.
Each subsystem was given very high standards for the design. For this project, each subsystem’s success depends on the success of the others. This required extreme dedication and team communication for this system to work properly. Emphasis on this was discussed daily by the project office to ensure that the team would not grow complacent in any area of the design. The team made it a priority early that LunaTech would produce a quality product that would be developed as designed by the customer. The project office also works closely with the systems engineer to set expectations based on what the systems engineer observed in the area of team communication and subsystem compatibility.
The team leader developed agendas before each meeting to be accomplished during the meeting. Issues concerning upcoming deadlines were handled first, and design issues followed. This allowed for the team to stay on task and work any critical design problems without the worry of missing a deadline. This also allowed the limited meeting time to be used more effectively. Each member was emailed the agenda prior to the meeting. This allowed them to prepare for any briefings or issues that needed to be worked during the meeting. Additional team work days were also created to allow the entire team to meet and work on any issues needing to be complete.
2.3 Systems Engineering
Table 3: Engineering Summary
Parameter Unit NotesOverall Vehicle
Mission duration 1 yearTotal mass
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
10

Number of sites visited 23 22 achieved with LPESSingle site goal mass 62 kg
Payload SubsystemTotal mass 373.1 kgSMD massESMD massPayload percentage of total mass 40 %
Power SubsystemType (solar, battery, RTG) Solar cells with lithium-ion
batteriesTotal mass 132.95 kilogramsTotal power required 937.1 wattsNumber of solar arrays 3 panelsSolar array mass/solar array 46.29 kilogramsSolar array area/solar array 6.16 square metersNumber of batteries 9Battery mass/battery 42.21 kilograms
Structure SubsystemTotal mass 170 kilogramsMaximum “g” load 7.15 g
Thermal SubsystemOperating temperature range 20 ۫ C Inside Thermally
Controlled EnvironmentNon-operating temperature range Below -10 ۫ C and above
+ 40 ۫ CNominal Operating Temperature of Li-Ion Batteries
Total mass 34.90 kgPassive/Active system Semi-passive
GN&C SubsystemTotal mass 17 kilogramsAccuracy Estimate +-10mPower required 70 Watts
Communication SubsystemTotal mass 17 kilogramsType (UHF, S-band, X-band) Ka-band Transmitter
UHF ReceiverBandwidth Ka-band 26-32 GHz
UHF 401.5 MHzPower required 58/44.2 wattsStorage capacity 50 Gigabytes
Mobility SubsystemType PenetratorsMaximum velocity 300 m/s
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
11

Total mass 308 kgPower required 500 watts
The systems engineering position was in charge of planning for the entire project. This included creating an initial mass and power budget for each subsystem, including margin into the design for overruns, and ensuring that each subsystem stayed on task.
Each subsystem budget was developed with margin included. The mass margins were designed to have extra mass available to distribute among different subsystems as necessary. The maximum mass is set forth in the CDD. The mass margins were set using the American Institute of Aeronautics and Astronautics (AIAA) recommended weight contingencies for spacecraft. The mass margin was left at 10% of the total mass. This was lowered because of inherent margins in the initial mass and power equations. The total usable mass was initially set at 932.6 kilograms for each of the subsystems. Refer to Table 7 and Table 8 for the actual mass and power budgets for Daedalus.
The power requirements were approximated at 700 watts at any single time during operations. A similar method of creating a margin was used for setting up the power supply. These preliminary numbers were used to guide the designers. Each subsystem was allotted a power value, because the lander would not require all systems running concurrently. The power system was a larger variable than the mass systems because the power requirements were based on the operations of the lander.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
12

1
2
3
4
5
6
7
8
9
10
11
Subsystem InteractionAnalysis
Results
Power Requirements
Engineering Analysis
CDD Requirements
Redundancy
Reliability
Systems Engineer
Subsystem Expert(s)
Research
Trade Tree
Trade Study
CostMass Requirements
CDD/ Customer
Project Office/ Manager
Figure 2: Information Flow Chart
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
13

2.4 Power
2.4.1 Methods and AssumptionsThe main goal throughout the design of the power system is for the Daedalus to survive a one year mission on the Moon. This is just one of the critical requirements that affected the design of the power system. Another driving factor of the design is to land at a polar location. Due to the polar location, 14 days of light and 14 days of darkness are assumed. However, certain landing locations on the southern pole may allow for the Daedalus to receive 70% sunlight per month. The power system was designed to assume the 14 day cycle for a worst case scenario. The Daedalus is to be launched no later than September 30, 2012; therefore, time is critical for acquiring all components.
There were many consideration reviewed for generating power, such as solar cells with batteries, nuclear power, and fuel cells. The first option considered was solar cells with batteries. This would utilize the available source of light to generate power and charge batteries during the daylight. Yet, during the dark periods only the batteries would be active. Many batteries were reviewed and in general, lithium batteries were considered to be the most appropriate due to the high specific energy and storage capacity. Lithium-sulfur dioxide batteries and lithium-ion batteries were the two choices for the power system. The lithium-sulfur dioxide batteries were eliminated due to the voltage drop, ranging from seconds to minutes, after the initial power surge.
Another option of power considered was nuclear power. A Radioisotope Thermoelectric Generator (RTG) and a Stirling Radioisotope Generator (SRG) were examined. Both of the nuclear power options were eliminated. The SRG has a low Technology Readiness Level (TRL) compared to the RTG. Therefore, it was eliminated. Cost for the Daedalus is to be as minimal as possible. RTGs come at a very high cost due to the nuclear power. Another reason for elimination is due to the assumption that time and availability would be an issue. The acquirement of nuclear power may affect the launch date previously mentioned.
The final option of power was solar cells in combination with fuel cells. Regenerative fuel cells and hydrogen fuel cells were the two choices considered. The fuel cells are effective, yet they contain a large amount of mass. And, since the Daedalus would be testing samples, the fuel cells were eliminated due to the by-product of water. This water may have an adverse effect on the sample testing.
2.4.2 Results and Discussions All of the methods and assumptions have contributed to the power combination of solar arrays, lithium-ion batteries, and a power control unit. The solar power system allows Daedalus to power itself during light periods and recharge the lithium-ion batteries for use in the dark periods. The maximum output power of this arrangement is 937.1 watts. The minimum amount of power that needs to be obtained to maintain all systems running is 700 watts. This budget is derived from the initial power budget table that can be found in Table 8 in Appendix B. LunaTech designed the power system to generate excess power to charge the
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
14

batteries, make up any lost power in case of damaged parts, and/or extend the mission past its required lifetime. The total mass of the solar cells, lithium-ion batteries, and support system is 132.95 kilograms. This is under the mass budget of 158.6 kilograms. This budget is derived from the initial mass budget created by the project office and can be found in Table 7 in Appendix B. The design of this system is based upon the Venus Express spacecraft which launched in 2005.
Since there is the available light source from the Sun, the Daedalus utilizes solar cells. The Daedalus design includes 3 Gallium Arsenide solar panels based off of the Venus Express Spacecraft. Two of the panels are the same size while the third panel is 1/7 th smaller. It provides the extra amount of power generation needed for this design. The total solar array area is 6.16 square meters. The panels are covered with Optical Surface Reflectors (OSRs) to minimize the effect of extreme temperatures. Each large panel is 1.78 meters in length and 0.8 meters in width. Each large panel weighs 20.25 kilograms with an output power of 410 watts. The degradation rate of the solar panels is expected to be 2.75% a year. Therefore, considering the length of the mission, the degradation is minimal. The total power acquired from these panels is 937.1 watts with a total weight of 46.29 kilograms.
It is important for the design to include batteries that have a high specific energy and a long cycle life. The Daedalus will run off of batteries during the dark periods that occur on the lunar surface. The design will use Sony 18650HC lithium-ion batteries. Lithium-ion batteries were chosen because they have a high specific energy, high output power to weight ratio, and the availability for space applications. The specific energy is 114.6 W-hr/kg. Each battery has an energy rate of 9 Ampere-hours.
The number of batteries needed to provide adequate power to the Daedalus is 9. This results in a total calculated mass of 42.21 kilograms and a total volume of 1.34 cubic feet. The mass of batteries was estimated upon the discharge rate as well as how much each subsystem would be in operation during the dark periods. The batteries have a discharge rate of approximately 20%. The dark period consists of 14 days, which is 336 hours. The systems that will be running 10% of the time are power and thermal. The rest of the time, the systems will be down. The batteries have an operating temperature of -10 degrees Celsius to 40 degrees Celsius. When in operation, these batteries generate a lot of heat in the thermal compartment; therefore the thermal system does not have to be on all of the time. The thermal system will discuss this more in detail in the next section. Payload, communication, and guidance, navigation, and control will only be running 1.25% of the time during the dark periods. This results in a total energy-rate output of 8.53 kW-hrs. Review Appendix D for calculations.
With the solar cells and Lithium-Ion batteries, a power control unit (PCU) is needed in order to properly condition and manage the power generated from solar cells and batteries. The batteries must be fully charged from the solar cells once daylight has ended. The Daedelus PCU shall have 2 Auxiliary Power Regulators per Solar Cell and 1 Battery Charge/Discharge Regulator per Battery. The average charge time of the batteries is 12 hours. The PCU will utilize a STMicroelectronix ST0F269 digital signal processor and/or Microprocessor, with IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
15

Crydom CMX60D10 Solid State Relays and ON Semiconductor LM350 positive voltage regulators. The total mass of the power control unit is 38.95 kilograms and the mass of the wiring is 1% of the estimated dry mass which is 9.5 kilograms. This comes to an overall mass of the power support system along with a 10% margin for unexpected additions to be 53.3 kilograms. The volume of space the PCU will take up is estimated to be 2.2 cubic feet. Refer to Appendix D for calculations. A flow diagram of the PCU is shown in Figure 3.
Figure 3: Power Control Unit
2.5 Guidance, Navigation, and Control (GN&C)
2.5.1 Methods and AssumptionsThe first step in designing the GN&C system was to identify the requirements associated with its design and performance. The main pertaining customer requirement involving the GN&C system is the ability to land with a precision of ± 100 meters 3 sigma of the predicted location.
Multiple assumptions had to be made when designing the GN&C system. Since the customer designated the mission to begin at terminal descent at an altitude of 5 kilometers above the lunar surface, the team assumed that at 5 kilometers is when the design begins. At this point, no initial horizontal corrections will be necessary to put Daedalus on its intended course. Also at this point, the assumption is that there is zero velocity relative to the Moon. Afterwards, the vehicle will descend to the lunar surface at a rate of 5 kilometers in 3 minutes. During the descent, there is an assumption that the distance the Moon rotates under the Daedalus is negligible. Once the requirement and assumptions were established, the actual system design began.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
16

2.5.2 Results and DiscussionsThe GN&C system for the Daedalus concept will be responsible for the terminal landing sequence of the vehicle, which starts at 5 kilometers above the lunar surface. It will be responsible for properly positioning the vehicle along the right descent path and releasing the penetrators at the correct location above the Shackleton Crater, so that all penetrators land in their intended locations, as well as land the vehicle safely on the surface. The Daedalus GN&C system is will be divided into three categories: sensors, guidance computer, and controls.
The sensors will provide critical information on the current state of the vehicle to the guidance computer. Two Honeywell HG1930 Micro Electro Mechanical Sensor Inertial Measurement Unit’s (MEMS IMU) will contain 3-axis strap-down-rate gyros to measure vehicle body attitude rates with respect to the inertial frame and 3-axis accelerometers to measure vehicle body accelerations with respect to the inertial frame. Two IMUs will be used for redundancy and for the case of a failure. The IMUs will be responsible for controlling the vehicle attitude only; it will not be used for navigational purposes.
Two Ball Aerospace Flash 3D Light Detection and Ranging (LiDAR) systems will measure altitude, relative velocity, and useful surface terrain information such as surface slope and hazard detection. This sensor will help the vehicle avoid potential hazards such as rocks or holes, as well as give it the ability to pitch the vehicle to the same slope as the landing surface, providing equal forces on all four vehicle legs during touchdown. Because of their importance, two will be used for redundancy and in case of failure.
Two Long Range Optical Cameras (LROCs) will be used to provide the vehicle with Digital Scene Matching Area Correlation (DSMAC) technology. DSMAC will compare a stored image that will be obtained from the LRO prior to launch, to actual images that the LROCs will obtain while descending. This will tell the vehicle exactly where it is in a latitude-longitude sense at any time. This technology has been used and proven for many years on Tomahawk cruise missiles, and is said to provide enough accuracy to hit a window on the side of a building from 500 miles away. DSMAC will provide Daedalus with the ability to launch the penetrators from a precise location, as well as a landing precision that far exceeds the 100 meter requirement. The LROCs will also provide the single site light level readings during the mission on the surface. Two DSMAC cameras will be utilized to help overcome any boresite issues, as well as help if one cameras field of view gets obstructed by dust or by the lander itself in a high pitch maneuver.
The guidance computer will be responsible for processing the signals obtained from all the guidance sensors and outputting the correct command signals to the main engines and Attitude Control System (ACS) to guide the vehicle safely and efficiently to the intended landing spot on the lunar surface. A BAE Systems RAD6000 CompactPCI Single Board Computer with RAD750 Microprocessor will be used to achieve this task. The computer will be responsible for controlling penetrator and rover deployment as well as smaller tasks after landing such as solar cell and antenna deployment.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
17

The controls for landing will consist of 2 Aerojet MR-80 main engines, and 16 Aerojet MR-108 engines that make up the Attitude Control System (ACS). The main engines will be responsible for controlling the vehicles relative velocity and acceleration to ensure a soft landing speed, and will rely mostly on the altitude and velocity readings of the LiDAR. The ACS will control the vehicles yaw, pitch, and roll, and will power the large horizontal movement after the penetrators are launched at 3 km altitude. Both the main engines and ACS are provided to us by the Aerojet Company.
The Daedalus GN&C system will provide the vehicle with a completely autonomous landing and penetrator firing sequence. All inputs will be chosen before the mission and programmed into the computer. These inputs will be based mostly on LRO data and mission planning.
2.5.3 OperationsAt 5 km, all GN&C sensors, controls, and computer power up from a dormant state. The LiDAR immediately begins taking altitude and descent velocity readings and feeding them to the computer, which in turn initiates the main engines to give the control descent rate. The IMU’s also immediately power up to observe the vehicles attitude so that the ACS can keep the vehicle in a horizontal state. The LROCs will also begin taking pictures of the lunar surface below and calculating the latitude and longitude of the vehicle continuously. If any adjustments need to be made, the computer will send the appropriate signals to the ACS to position the vehicle back on track. All these operations run continuously as Daedalus travels thru its penetrator and landing sequence explained in the Concept of Operations section. When the vehicle reaches 100 meters above the lunar surface, the LiDAR begins scanning the surface for hazards near the landing site. If such a hazard exists, the computer will use the ACS to adjust the landing site to a safe location. If no such hazards exist, the LiDAR will determine the slope of the landing site, and the computer will begin pitching the vehicle to match the landing surface. When the LiDAR detects the vehicle being 5 meters above the surface, the computer shuts down the main engines and ACS.
2.6 Thermal
2.6.1 Methods and AssumptionsThe thermal control subsystem employed in the Daedalus Lander is intended to provide a stable thermal environment in which mission critical equipment and components are maintained at acceptable operating temperatures. The thermal control subsystem supplies a means of dissipating unwanted heat during the sustained hot period and a method of generating and retaining internal heat during the sustained cold period. Both passive and active systems are employed and thus the thermal control subsystem design is referred to as a semi-passive approach. There were numerous assumptions that were made in order to assist in producing a realistic and achievable analysis. The heat transfer from the vehicle was assumed to be steady state due to the fact that the worst-case cold and worst-case hot conditions occurred over periods that were 14 days in length. The transfer modes were also assumed to be one-dimensional since flow was generally into or out of the vehicle. Instead of analyzing the system through a range of temperatures, all analysis was performed assuming a temperature inside the lander of 20 degrees Celsius. The operating temperature is IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
18

acceptable for all of the critical components and eliminates calculating the power requirement through a range of internal temperatures. The space surroundings and the lunar surface are assumed to operate as blackbodies in order to simplify radiation analysis.
The ambient temperature ranges for the worst-case cold and worst-case hot conditions were assumed to be -223 degrees Celsius and 100 degrees Celsius respectively. Conductive losses were assumed to occur inside the thermally controlled environment of the spacecraft due to structural supports that may protrude outside of the controlled environment. These conductive losses are greatly dependent upon the amount of cross-sectional area that they are conducting through. It was assumed that there would be 8 cylindrical rods of 0.25 inch radius that could possibly be providing a thermally conductive path and facilitating conduction heat losses.
The effective emittance was calculated using the method provided in the “Spacecraft Thermal Control Handbook” (Gilmore). The values for the multiplier factors were obtained from the tables provided in the aforementioned resource (“Spacecraft Thermal Control Handbook”, page 169). This calculated effective emittance was used for the radiation transfer that was assumed to occur between the vehicle surface and the surroundings. An energy balance was performed on the insulated vehicle surface in order to determine the heater power that would be required to maintain 20 degrees Celsius inside the spacecraft during the worst-case cold condition. The calculated mass of the components that comprise the thermal control subsystem is shown below:
Table 4 : Thermal Control System Components
Component QuantityEstimated
Mass Units
Total Mass [kg] Volume [m^3]
Mulit-Layered Insulation 28 0.73 kg/m^2 20.44 N/A
Variable RHU Packages 10 0.39 kg/m 3.90 5 RHUs
RHUs 50 0.042 kg 2.10 26mm dia x 32mm long
Solid-State Contollers 2 0.03 kg 0.06 16.5 x 21.6 x 24.1mmHeaters 1 2.00 kg/m^2 2.00 N/ARadiator 0.57 3.30 kg/m^2 1.88 0.57 m^2 on topPaint (White & Black) 8.5 0.24 kg/m^2 2.04 N/A
Thermal Switch 5 0.10 kg 0.50 38.1mm dia 25.4mm height
VC Heat Pipes 6 0.33 kg/m 1.98 1.27cm diaTotal Mass 34.90
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
19

2.6.2 Results and DiscussionsPassive measures are employed extensively on the spacecraft due to their relatively low complexity, cost, and implementation. Multi-layered insulation blankets are utilized for the entire exterior of the vehicle. The insulation is a 15 layer insulation blanket with a beta cloth outer-cover material. The beta cloth was chosen due to its mechanical strength properties. The interior-layer material is aluminized kapton. The separator-layer material is Dacron netting and inner-cover material is a kapton laminate. Various thermal control coatings are also used in the subsystem. The outer surface of the radiator is a white paint to minimize absorbed solar energy and all internal surfaces are painted black to enhance radiative heat transfer which helps to isothermalize the internal compartment.
A high conductance aluminum mounting plate will be located inside the thermally controlled compartment of the lander. This “cold plate” will be used to mount sensitive electronic equipment and the high thermal conductivity aluminum will help to dissipate the heat generated by the operation of these components. The cold plate will be the same length and width of the thermally controlled compartment and will be ¼ inch thick. Component placement on this plate will also facilitate proper heat dispersion. Components that run simultaneously will be purposely separated while components that run at high temperatures will be centrally located on the plate to maximize heat dissipation. The thermally controlled compartment will be encased with multi-layered insulation blankets and will consume a large amount of the available volume on the interior of the spacecraft.
Thermal switches will be used on the interior of the vehicle to provide thermal conductive paths where necessary. Thermal switches will be used to take advantage of the lithium-ion batteries that will be running during the 14 day dark (cold) periods. The lithium-ion batteries generate a lot of thermal energy that can be used to heat internal components and other essential equipment. The thermal switches will provide a conductive path to internal components and their mounting structures that will assist in keeping them at a safe operating temperature and thereby reducing the duty cycle of electric heaters.
Variable conductance heat pipes will be used to dissipate heat to the external radiator located on the top of the vehicle. The heat pipes will be essential in order to dissipate the heat that is generated by the variable radioisotope heater units (VRHUs) and the waste heat from inside the spacecraft during the fourteen day hot period. The VRHUs generate a constant thermal wattage that must be dissipated to the radiator during this period. The variable conductance heat pipes used will be 1.27 centimeters in diameter and will utilize a compatible material and working fluid of aluminum and ammonia respectively. The heat pipes will be constructed with an axial groove composite wick design in order to maximize capillary pumping, thermal conductivity, and permeability. The groove wick is susceptible to gravitational affects; however, the small-pore screen is believed to generate the needed capillary pressure to overcome this affect with only a single wrap. (“Heat Pipes”, Genium Publishing)
Radioisotope Heater Units (RHU) will be used inside of variable RHU containers. The containers allow the heat to be applied to the desired source only when it is desired by means
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
20

of a bimetallic actuator. When the temperature is below the desired range the variable RHU container will allow for the heat to be transferred to the location. When the temperature reaches the high point of the desired range, the container will rotate again; this places a thermal insulation blanket between the RHUs and the controlled location. During the 14 day light period, this heat provided by the RHUs must be transferred out of the spacecraft. This waste heat will be removed by the heat pipes to an external, surface radiator. The RHUs will provide the needed heat during the 14 day dark periods. Fifty RHUs will be utilized in order to provide approximately 50 watts to the controlled environment. These 50 RHUs will be located inside 10 variable RHU containers that hold 5 RHUs each.
2.7 Structures
2.7.1 Methods and AssumptionsThe structural package for the Daedalus is a square design based on a four-legged configuration presented at the Viking science instrument team’s meeting in 1968. The lander mounts to the Atlas V-401 payload adapter and is equipped with the electrical interfaces necessary to power the lander during flight. The lander body structure is square in shape with the 4 corners housing the landing legs. The exterior sides between the legs will support the Helium and Hydrazine tanks. The enclosed volume of the lander body is approximately 120,000 cubic inches. The square structure allows room for the main propulsion motors, penetrators, batteries and other instrumentation and payload inside the structure. The structure, with thermal protections in place, shields sensitive systems from exposure to the harsh environment of the Moon. Ramps mounted on top of the structure allow the deployment of the rover and double as surface area for solar cells. The entire package fits inside the Atlas V-401 EPF shroud configuration.
The 4 landing legs provide stability for the structure upon landing on the uneven lunar terrain. The landing legs of the Daedalus are modeled directly after the legs of the Viking Landers. The legs consist of a main strut that is stowed during flight inside a larger cylinder that houses the crush pads. The strut is spring loaded and upon ejection of the vehicle extends and locks into place. The legs are also equipped with a round plate-like foot pad that is pinned to the end of the main strut. This foot pad provides a stable and level base for the lander and spreads out the impact to the lunar surface. The landing legs are equipped with shock absorbers in the form of honeycomb crush pads. These are of the same design as the Viking Mars landers and prevent the lander from incurring damage from a hard landing. The term “hard” in this case refers to terminating propulsion 5 meters above the lunar surface and dropping to the final landing site. The landing legs are also equipped with 2 braces that plastically deform upon impact and help to absorb shock of the landing.
2.7.2 Results and DiscussionsThe structure of the Daedalus is constructed mainly of 6061-T6 Aluminum alloy and some small components requiring increased strength are constructed of 6AL-4V Titanium alloy. Refer to Table 8 in Appendix G. The structure was analyzed by finite element analysis (FEA) using CosmosWorks FEA package in the SolidWorks modeling program. The structure was also analyzed using approximate hand calculations. The structure was analyzed for 2 different phases of the mission. IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
21

The first phase of the mission analyzed was the launch phase. The structure is designed to withstand approximately 5.5 g’s, with a maximum of 7.15 g’s, during flight. This acceleration applies a force of approximately 4448 Newtons onto each vertical and horizontal member of the lander, since there is an equal number of each member. This calculation is shown in Appendix G. Analysis was performed on both a horizontal and a vertical member of the structure. The vertical member is constructed of 6061-T6 Aluminum and consists of a .25-inch-thick tee extrusion that is 12 inches long. The finite element analysis was performed on the vertical member and the results are shown in Figure 5 of Appendix G. This analysis displays a factor of safety of 8.8. The vertical member was checked for column buckling and yielding of the material using equations as shown in Appendix G. These calculations display a minimum factor of safety of 12.4. Similar analyses were performed on a horizontal member of the lander. The horizontal member is also constructed of 6061-T6 Aluminum and consists of a .25-inch-thick angle extrusion that is 12 inches long. This length is the approximate distance between vertical members. The Finite Element Analysis (FEA) results are shown in Figure 6 of Appendix G and displayed a factor of safety of 1.3. The hand calculations as shown in Appendix G display a factor of safety of 24.9.
The second phase of the mission analyzed was the landing sequence. The velocity upon impact is expected to be 4 meters per second and the impact of the landing is assumed to occur over a period of 5 milliseconds. The resulting impact force upon landing is calculated to be 797,600 Newtons as shown in Appendix G. The landing leg strut analyzed is constructed of 6061-T6 Aluminum and consists of a 12-inch-long, 1.2-inch-diameter solid rod. From calculations shown in Appendix G, each landing leg has to withstand an impact force of 230,200 Newtons. It is assumed that the crush pads absorb 90% of this force. The FEA was performed on a 1-inch-diameter solid rod using the remaining 10% of the impact force applied to the strut at a 60 degree angle, which is shown in Figure 7 in Appendix G. However, this force would be shared by the 4 legs. Thus the factor of safety of 3.1 for the landing legs shown in Appendix G is actually 12.4. The landing legs were checked for column buckling and yielding as well. These calculations are shown Appendix G and display a factor of safety of 1.13.
2.8 Payload
2.8.1 Lunar Penetrator Exploration System (LPES)To achieve the scientific goals given by the customer, the team has chosen to design the Lunar Penetrator Exploration System to satisfy the mobility requirements for the mission. LPES is based on a combination of penetrator systems currently in development. The team researched both the Deep Space 2 penetrator and the LUNAR-A penetrator as possible solutions for the LPES. The team chose to use the LUNAR-A penetrator based on its robustness, extensive testing, and realistic design. The Deep Space 2 penetrator was estimated to be at TRL 6 and a mass of 3.85 kg. The team felt that the design of the Mars Deep Space 2 penetrator would not lend itself to the harsh lunar environment. Also, the extremely light-weight design was a concern to the team for surviving impact and providing enough structure to accommodate all required payload. In contrast, the LUNAR-A penetrator was specifically designed for a lunar reconnaissance mission. The robust design IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
22

allows the LUNAR-A penetrator to accommodate all required payload needed to achieve the science goals given by the customer. The overall mass of the system was reduced to 14 kg by removing the propulsion system from the penetrator. The propulsion system was originally designed to provide course corrections and stabilizing during descent, however LPES will use a spring ejection system and angled tubing to launch the penetrators.
Table 5: LPES Requirements
Penetrator RequirementsImpact Deceleration Up to 10000g
Impact Angle (between impact velocity vector and tangent to surface) ~90 degrees (not critical)
Attack Angle (between penetrator long axis and impact velocity vector) ~<8 degrees (critical)
Penetration Depth into Regolith 1-2mMission Duration 1.2 year
By utilizing a light-weight ejection system and removing the propulsion, mass is conserved to allow for 22 penetrators with a mass of 14kg each. Each penetrator will have a diameter of 14cm and a length of 75cm. Without an atmosphere to perform Aerobraking i.e.Deep Space 2, the LUNAR-A penetrators will have to be ejected from the carrier spacecraft with very little lateral velocity, at the appropriate height so that free fall will give the penetrators the proper impact velocity. The penetrators will be spring loaded into chambers located on the bottom of Daedalus. At 5km above the lunar surface 22 penetrators will be released.
LPES GEOMETRYDeployment
Penetrators n alpha beta r (m) theta2 1 180.00 0.00 0.00 0.004 2 90.00 45.00 250.00 2.056 3 60.00 60.00 500.00 4.098 4 45.00 67.50 750.00 6.1210 5 36.00 72.00 1000.00 8.1312 6 30.00 75.00 1250.00 10.1214 7 25.71 77.14 1500.00 12.0916 8 22.50 78.75 1750.00 14.0418 9 20.00 80.00 2000.00 15.9520 10 18.00 81.00 2250.00 17.8222 11 16.36 81.82 2500.00 19.65
There is a geometrically sized ring that the chambers will be aligned to. Each chamber is angled at 19.65 degrees from the center y-axis. This will insure that all 16 penetrators will be a minimum of 500m from each other IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
23

and allowing the smallest angle of attack. Using GN&C capabilities, Daedalus will center itself 5 km above surface and between 1091.67 m and 1637.5 m from the ridge of Shackleton Crater. This will insure that 16 penetrators will land in the shadow area of the crater and 6 will land outside the rim in the sunlight area. For all the penetrators, the same impact velocity is needed to reach our goal of a depth into the lunar surface of 1-2m. The same sized springs will be used for the two sets but there will be a difference in depth that they penetrate into the lunar surface (set #1 falling 7km and set#2 falling 5km). Steel springs will provide an initial velocity of 315m/s leaving Daedalous. The 6 that land in the sunlight will only fall 5km not 7km. There impact velocity will then be 340.37m/s and burrow to a depth of 1.402m. With these initial velocities on the other 16 penetrators an impact velocity of 368.17m/s and a depth of 1.53m can be acquired.
Equations Used:
Penetrator Impact Velocity
Penetrator Depth
G-Force
At this speed the penetrators will have to withstand a G-force of ~4500 (Appendix Chart). A vast amount of resources has been devoted to testing survival conditions of the instrumentation at such speeds. These types of “missiles” are common within the defense sector and a limited range of components are available off-the-shelf that will survive impacts of >50,000g.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
24

Figure 4: LPES Proposed Landing Locations
Each penetrator will include micro-seismometers, a geochemistry package, a water/volatiles detector, a heat flow experiment, and accelerometers and tilt sensors. These packages support:
Lunar Seismology A network of micro-seismometers could detect the presence and measure the
size of a lunar iron core; determine crustal and basal fill thickness; the deep structure of lunar mantle; the origin and location of the enigmatic shallow moonquakes. These would benefit understanding of Moon’s residual magnetism; origin of Earth-Moon system; and evolution of planetary magnetic fields.
Lunar Thermal Gradients Passive thermometers would be capable of determining heat flow from the
Lunar interior and information on inhomogeneity of crustal heat producing
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
25

elements (U,K,Th). This is relevant to understanding the Moon’s early history. Lunar Water and other Volatiles Sensing Water sensors capable of detecting the presence, extent, and concentration of water and other volatiles (organic), would provide information on Lunar evolution and future Lunar resources. If possible, an isotope discrimination capability could also provide information on the origin of the water. Such information could also be relevant to astrobiology including the highly controversial panspermic theory of the origin of life on Earth.
Geochemical Analysis Provide ground truth for remote sensing XFA and multi-spectral imaging.
Far Side As there has not yet been a far side landing, and there is evidence that the near
and far sides of the Moon may be quite different internally, this could determine differences in regolith, lunar interior structure and composition.
The LPES will be designed to operate for 1-1.2 years below the lunar surface. This has very significant consequences for total energy requirement. It is not proposed to have a detached aft body surface element (unlike DS-2) and therefore all power must be generated internally. Moreover, the temperature on the lunar surface is estimated to be <50K which is dramatically different then Mars where the DS-2 is designed for. The instruments are powered by Li-SOCL2 (super lithium) batteries with an expected lifetime of one year. The batteries (with a power density ~430 Wh/kg) will power the electronics that will in turn provide heat to keep the instruments warm. A 400 MHz UHF hybrid telemetry system will be used for communication between the penetrators and the orbiter. The penetrator antennae will be 1 to 3 meters below the surface, but lunar regolith is relatively transparent to radio waves. The data transfer rate from the penetrators to LRO will be 2 kbps and will occur one hour each day when the LRO is visible. The LPES will be constructed out of Carbon fiber reinforced plastic, with an Ogive nose. Shock protection will be provided by high rigid epoxy-resin and glass micro-spheres.
2.8.2 Single Site ScienceDaedalus will transport three science packages to conduct single site science, utilized over a period of 1 year. A minimal volatile composition and geotechnical properties package with a mass of 3 kg, an enhanced volatile species and elemental composition with a mass of 5 kg, and an enhanced geologic characterization with a mass of 5 kg. These packages will be supported by a drill mechanism, arm and scoop, witness plates, and a camera system. The single site science system for Daedalus will use witness plates, solar cell efficiency, and a camera system to successfully determine: lighting conditions every 2 hours; micrometeorite flux; and observe electrostatic dust levitation and how it correlates with lighting conditions. These measurements will occur for the entire year to accurately observe the landing environment. Below is the list of payload instrumentation including with mass and power requirements.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
26

Table 6: Daedalus Single Site Scientific Instrumentation
Daedalus Payload Masskg
PowerW
Stereo imaging system or Radar or LiDAR 0.8 6
Mast for stereo imaging system 3.5 9.5Drill and drill deployment mechanism 20 30
Arm 13 43Scoop 0.5 0
Mass Spectrometer 19 75Geotechnical Experiments - cone
penetrometer 1.5 0
Geotech - bearing plate 1 0Geotech - shear vane 0.5 0
Magnets 0.5 0XRD/XRF 2 10
Total 62.3 173.5Estimated 168
2.8.3 Results and Discussion
2.8.3 Sample Return Vehicle (SRV)
2.8.2.1 Methods and Assumptions The SRV was designed by ESTACA in Paris, France. ESTACA was tasked with designing a vehicle that will bring the regolith samples safely back to Earth. For the mission to succeed, there were many constraints to consider. These are gathered in three main categories: performance, interface, and environments. This required the SRV to have a propulsion system able to escape the Moon velocity and an optimized trajectory in order to minimize the fuel quantity and then the fuel mass. This fuel economy will allow the SRV to deliver 1 kilogram of lunar regolith back to Earth. Next, the SRV must withstand the environment conditions anywhere in space, on the lunar surface, or on Earth as well as in any situation like launch, landing, or atmospheric reentry. The SRV shall be designed to keep the regolith samples viable; the team has to provide means to sustain samples in lunar condition. Finally, during the entire mission, the SRV has to be designed in relation to the Daedalus and the rover in order to fit in the Atlas V-401 shroud.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
27

The performance category consists of trajectory and the propulsion system. The trajectory is vital in order to develop the project. The distance the module covers influences the fuel consumption. As the SRV is going to pass from one orbit to another, the engine has to provide an impulsion that will depend on the change in velocity required.
The choice in propulsion system is also extremely important to ensure the SRV arrives at the designated position for landing. The main criteria for choosing the propulsion system are as follows. A hypergolic system is needed so that the oxidizer and fuel ignite spontaneously on contact with one another and do not need an ignition source. Since the SRV will only weigh 200 kilograms, a fuel mass of 160 kilograms will be used so that the other 40 kilograms will be used for a communication system and the structure. The propellant must also be able to be preserved. This is due to the fact that the SRV will stay on the Moon for a year, and the weight of thermal protection or a pressurization system will impair the design. In order to house the propulsion system, the interface had to be designed. The interface includes the overall design and structure of the tanks, nozzles, and combustion chamber. The oxidizer and fuel combination performance characteristics will determine the dimensions of the structure components. The dimensions of weight and volume are crucial, because the SRV has to correlate with the Daedalus design and rover design.
2.8.2.2 Results and DiscussionsFor the SRV to return back to Earth, there are 4 different orbits required. There is a circular orbit for the lift-off phase, then there is a hyperbolic orbit so the SRV can leave the gravitational field of the Moon, a elliptical orbit on the main course to the Earth, and then Earth’s circular orbit. In order to go from one orbit to another, the vehicle has to change velocity so that it will modify the orbit parameters. This change in velocity is made in conjunction with the short impulsions made by the engine, which in turn consumes fuel. The total consumption in fuel for the 4 orbits is calculated to be 159.24 kilograms. This leaves 40.26 kilograms left for structures, equipment, and sample compartments. These values are based upon velocity calculations, weight of the SRV, and fuel consumption calculations that can be found in Appendix X.
The trajectory had to be determined first, before the appropriate propulsion system could be designed. The propulsion system will be a bi-propellant system of Nitrogen Tetroxide (NTO) and Monomethylhydrazine (MMH). This oxidizer and fuel combination optimizes the SRV weight, as well as satisfies the main criteria mentioned above.
The design below was chosen to minimize the mass structure. For this to be possible, the tanks were designed to be on the outside of the body, with a spherical design being the most effective shape. The bi-propellant system of NTO and MMH require two tanks each to contain the fuel as well as balance the system. The shield that is placed on top of the structure is a shield to deflect the high temperature flow from entering the Earth atmosphere. This shield also provides as protection to the tanks from flow and reflow.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
28

The diameter of one of the spherical tanks is 0.41 meters and the volume is 0.077 cubic meters. The weight of one of the tanks is 0.989 kilograms. This does not include the weight of the fuel. The material chosen for the tanks was titanium, due to the lightness of the material compared to aluminum and steel. The nozzle is constructed of niobium which is one of the metals most resistant to temperature. The diameter of the exit nozzle and neck nozzle is 0.15 meters and 0.021 meters, respectively. The length of the nozzle is 0.24 meters. The combustion chamber is made of niobium and has been calculated to have a mass of 0.972 kilograms. All of these calculations can be found in Appendix X.
Figure 5: Daedalus Sample Return Vehicle
2.9 Communication
2.9.1 Methods and AssumptionsThe first step in this process was to identify any requirements that would drive the communications design. There were only two constraints given by the customer. The lunar science experiments will generate a minimum of 300 MB of data per site. Also, the Lunar Reconnaissance Orbiter (LRO) would be available for use as a relay satellite.
The project office developed the mass and power budgets for the communications subsystem to facilitate the design. The power allotted for the subsystem was 119 watts, and the mass allotted was 56 kilograms. These values were based on historical percentages given by AIAA standards. The team also made an assumption of 100 Mbps for the data transmission rate. This assumption was based on the believed transmission capability of LRO discussed in
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
29

the NASA Ground Network of the LRO paper. [NASA LRO Paper]. The power and mass budgets forced the team to choose lightweight, high-performance components. The data rate assumption led the team to choose a high-gain radio frequency transmission method. This was chosen over laser optical methods because of the narrow beamwidth of the optical system compared to the radio system. [Lunar Base Handbook] Several high-rate frequencies were explored for the design. X-band was determined to be the most widely used high-rate frequency in space exploration, and it had a wide variety of compatible components for use on the lander. However, NASA has recently begun implementing the use of Ka-band in new spacecraft designs. X-band and other frequencies have been widely used by countless spacecraft, and the frequency pipeline has reached full capacity. This has forced NASA to use other frequencies to transmit data. The higher frequency of Ka-band allows for more data to be transmitted while using less power. For this reason, Ka-band was chosen as the main transmission frequency for the Daedalus design. NASA has allocated the 25.25-32 gigahertz range for the Ka-band to be used in space-to-space return link communications.
The team chose to make the communications design more robust, by combining a secondary UHF system with the primary Ka-band system. The Ka-band transmitter is connected to the high gain antenna, and a gimbal system is used for maneuvering. The team chose to use the UHF system for data uplink from Earth. This was chosen based on the comparison of the amount of data transmitted from Earth to the amount of data transmitted back. The UHF system will also function as a redundant system in case the Ka-band system fails. This will limit the amount of data transmitted, but it will still allow for communication to the lander. The UHF system is based off of the system currently used on the Mars Exploration Rovers (MER). The next phase of the design was to calculate the view time of LRO for data transmission. LRO will have several orbits throughout its mission life. This orbit variation will also cause the LRO view time to vary. For the design, the team chose to assume the orbit will be a circular orbit at an altitude of 50 kilometer. This was because the majority of time LRO will be in this orbit. Unfortunately, this orbit will provide the least amount of time for visibility. The time-of-flight for LRO for the polar landing location was determined to be 5 minutes, with a period of 113 minutes.
Next, the team determined the data rates needed for each link. For this mission there are several different communications links. The lander-to-LRO link will use Ka-band and will have a data rate of 100 Mbps. The LRO to Earth link will also use Ka-band and will have a data rate of 100 Mbps. The lander to LRO link will also use UHF and will have a data rate of 8 Kbps. The UHF system is based off of the MER design. The penetrator-to-LRO link will use UHF and will have a data rate of 2 Kbps. The team has assumed that there will be minimal affect of lunar dust on the transmission rates of the penetrators.
The Daedalus communications system was broken into two components, the Ka-band high gain system, and the UHF low gain system. The team designed the links for the Ka-band system. Several factors had to be considered for the design to work properly. The communication system must overcome losses of signal strength. These losses accumulate as the signal moves from each component to the next. However, because of the distance of IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
30

transmission, the most significant loss comes from propagation losses. These losses are estimated using Equation 1. The other losses are atmospheric and feeder, however, these losses were neglected for the Daedalus design. [Lunar Base Handbook].
(Equation 1)
The team designed the antenna for the Ka-band system. This would give the team the ability to overcome any losses by using signal amplification, transmission antenna gain, and receiver antenna gain. The receiver antenna gain is based on the design of the LRO; therefore the team chose to design only the transmission antenna gain. In doing research, the team determined that the simplest antenna design is an omni-directional aerial antenna. This design delivers signal with zero gain added. The ability for the antenna to direct its signal and concentrate it into a smaller area essentially amplifies the signal for the receiver. The smaller the aiming area will result in a higher gain, but it will require a precise aiming capability for the transmitting antenna. The team chose to use a parabolic reflector for the high gain antenna. This was chosen over the dipole and horn reflector because of its high gain and simple formulas for analysis. The team chose a parabolic reflector with an efficiency of 0.79 and a diameter of 0.28 meters. This was based off of the MER high gain antenna design.
(Equation 2)
(Equation 3)
2.9.2 Results and DiscussionThe team calculated propagation losses using Equation 1 and found the maximum propagation loss for the system would be 185.5 decibels. The team assumed the line losses to be 10 decibels, providing a total loss of 195.54 decibels. This leads to the transmitter antenna gain. Because the gain and beamwidth are inversely affected by the diameter of the antenna, as shown in Equation 2 and Equation 3, the design was made to maximize both and was finalized at 0.28 meters. With this diameter, the peak gain is equal to 36.4 decibels. The half-power beamwidth is 2.16 degrees to each side. The effective gain in relation to the angle of error is in Figure 3. This gives a beam with a diameter of 3.77 kilometers at LRO minimum distance. The team also researched high gain antenna gimbals to allow for directional pointing. The team based the Daedalus design on the design of the Mars Exploration Rover High Gain Antenna Gimbal. This gimbal is a two-axis gimbal produced for NASA by Ball Aerospace and Technologies Corp. It can control the position of the antenna with a precision of 0.5 degrees. It has a mechanical step size of 0.2 degrees. Reference Equation 1. The antenna used on the Mars Exploration Rover is also of a comparable size to the antenna specified above for our design. A gimbal of similar design is the choice for the rover. With the above step size, the gimbal would have to move, on average, once every 52 seconds as it follows the satellite. The tracking of the satellite and aiming of the antenna will require future analysis. For this project, the team allocated space and power for the controller. A plot of the gain pattern is shown in Figure 3. The plot shows that the antenna can have an error of 2
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
31

degrees in either direction and still be able to stay connected. This is well within the limits of the antenna gimbal.
Figure 6: High Gain Antenna Design Plot
To summarize, the Daedalus communications system utilizes the communications architecture of the Mars Exploration Rovers. The Daedalus uses a Ka-band system to transmit data to the LRO for relay back to mission control. The Ka-band system is connected to a high gain antenna based on the Mars Exploration Rovers. The Ka-band system is capable of transmitting 100 Mbps of data to LRO, and transmits on a frequency of 26 GHz. The total mass for the Ka-band system was determined to be 13.8 kg. The total power consumption was determined to be 58 watts during transmission, and 1.2 watts while idle.
The Daedalus uses a UHF system to receive data from mission control. This was also based on the Mars Exploration Rovers. The UHF system is connected to a low gain antenna and is capable of transmitting 8 Kbps at a frequency of 437.1 MHz. The UHF system also adds a level of redundancy to the Daedalus communications system. In the event that the Ka-band system fails, the UHF system can step in and transmit data from Daedalus to mission control. This contingency plan would increase the transmit time of data because of the lower data rate capability of UHF. This would be taken in to account in the Daedalus communications ConOps. This capability increases the efficiency of Daedalus to get important data into the stakeholder’s hands. The mass of the UHF system was determined to be 3.2 kg. The power
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
32

consumption for the UHF system was determined to be 43 watts while transmitting and receiving, and 6 watts while idle.
The Daedalus LPES communications system utilizes a UHF system to transmit data to LRO for relay back to mission control. This system is capable of transmitting data at 2 Kbps at a frequency of 32 MHz. The communication system is based on the LUNAR-A communications system and utilizes the existing hardware currently being developed.
2.9.3 OperationsThe operations planning of the communications system is mostly based on the relay satellite availability. LRO will only be able for communication for 5 minutes every 113 minutes or 1 hour every day. This impacts the entire ConOps design for Daedalus and LPES, and had to be considered for every phase of the mission. During the periods when it does not have satellite coverage, Daedalus and LPES will store all data on the solid state data recorder.
2.9.4 Data Handling and StorageDaedalus and LPES will have an available communication link for 5 minutes for every 113 minutes or 1 hour per day. While LRO is not in view, data will be stored on solid state recorders for transmission when LRO is visible.
Daedalus has a maximum transmission rate of 100 Mbps. The team has determined that Daedalus could potentially transmit 3576 MB of data every time LRO is visible. However, the actual value will be slightly less than that value due to hardware limitations. The time it will take Daedalus to transmit the minimum 300 MB of data for the mission was determined to be 10 minutes based on the Ka-band system. The LPES system, using UHF communication, could potentially transmit 0.072 MB of data every time LRO is visible. Again, the actual value will be slightly less due to hardware limitations. The time it will take each penetrator to transmit the minimum 300 MB of data for the mission was determined to be 347 days. This requires a dedicated data transmission system to continuously update mission control with scientific data to ensure that 300 MB of data will be sent.
Table 7: Daedalus and LPES Communication Rates and Data Transfer
Operation System Rate Size TimeDaedalus to LRO Every View Time Ka-band 100 Mbps 3576 MB NADaedalus to LRO Every 24 Hours Ka-band 100 Mbps 42912 MB NADaedalus to LRO For Entire Year Ka-band 100 Mbps 300 MB 10 min.
Penetrator to LRO Every View Time UHF 2 kbps 0.072 MB NAPenetrator to LRO Every 24 Hours UHF 2 kbps 0.864 MB NAPenetrator to LRO For Entire Year UHF 2 kbps 300 MB 347.2 days
The Daedalus flight computer will utilize an OTS system routinely used on spacecraft missions. The flight computer is the key component for the entire lander control system. Redundancy and robustness are key parameters for this component. After doing research, the team chose to use a BAE Systems RAD6000 flight computer. This system is flight certified
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
33

TRL 9 and is currently used on Mars Phoenix Lander. This system is radiation hardened and powerful enough to easily control all systems onboard Daedalus. The data bus will employ a distributed architecture that will allow it to use multiple central processors. For this design, all software is resident in the non-volatile memory. During various mission phases the software components which are executing may be different than those executing during other mission phases. This provides a high level of redundancy. The central processors may be used to perform “data processing” functions for the sensor front-ends or the actuator back-ends, as required. However, using this design requires more complex testing, because the system can reconfigure itself as software modules are allocated to processing resources
The designers have concluded that approximately 50 gigabytes of memory should be sufficient to handle the needs of the lander and have allocated 30 gigabytes of this memory for storage of images and other scientific data. The remaining 15 gigabytes will be used for operational needs and 5 gigabytes of data will be used for emergency storage. This will be a redundant system storing operation memory in two locations in case of data corruption. Daedalus will use BAE Systems C-Ram radiation hardened memory for the non-volatile flash memory. These are available in 512K x 8 packages. Non-volatile gives Daedalus the ability to keep the stored data even if power is lost to the computer system. This provides a level of security for the design.
2.10 Concept of Operations
2.10.1 Overview The concept of operations (ConOps) for the Daedalus lander will depend on the interactions of three main components: the LRO, LPES, and Daedalus. These require the interactions of all subsystems on Daedalus to work effectively to achieve the goals of the mission. The LRO ConOps will be essential to receiving and transmitting all data to and from Daedalus and LPES, as well as provide key images of the landing sites for both the penetrators and the lander. The lander ConOps will consist of descent, penetrator deployment, landing, and the 1 year science mission. The LPES ConOps will consist of deployment, landing, and data collection. Using this overview, a more detailed concept of operations package was developed for the Daedalus mission, and the details are discussed below.
2.10.2 LRO Concept of OperationsThe LRO is an essential key to the success of the entire mission. Images collected from the LRO will be stored in the DSMAC system for correlation, and for the positioning of the penetrator launch and Daedalus landing locations. LRO will also serve as a communications satellite for the mission. LRO will collect the data from the lander and LPES, and transmit it back to mission control. The orbit for LRO gives the lander and penetrators 5 minutes of transmission time for every 113 minutes, or about 1 hour per day (see Appendix I for details). This time-of-flight will vary for the lander and penetrators based on their locations. The maximum assumed data transmission rate from Daedalus to the LRO is 100 Mbps. However, the transmission rate between the penetrators and LRO are 2 Kbps. The CDD suggested a maximum of 300 MB of data will be generated per site. This equates to 6900 MB of total
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
34

data generated from the 23 sites for the entire mission. The communications system on the Daedalus allows it transmit 3576.3 MB of data every time LRO is visible. This exceeds the requirement of transmitting 300 MB of data for the entire mission to mission control, however this value is theoretical and the actual value will be downgraded somewhat. The LPES uses a UHF system to transmit data to the LRO. The maximum data transmission rate for each penetrator is assumed to be 2 kbps. The communications system allows each penetrator to transmit 0.072 MB of data every time LRO is visible. This may require some data be stored in the penetrator memory for uploading to LRO when it is available. The penetrator system will complete its data transmission 347 days after activation.
2.10.3 LPES Concept of OperationsDaedalus will carry 22 penetrators for the mission. These penetrators will be based on LUNAR-A design and each penetrator will be housed in the penetrator launch system. This system will utilize a spring-loaded system with shear bolts to release the pre-tensioned springs to eject the penetrators away from the lander. Each penetrator will be positioned in tubing that is angled at the correct orientation to achieve the required 500 meter distance per sample site. There will be two extra penetrators one for each environment to increase the success rate of the system. At 5 kilometer above Shackleton crater, Daedalus will launch all 22 penetrators with an impact velocity 350 meters per second (see Appendix H for details). These penetrators will impact the lunar surface in both the permanently dark and lighted regions and begin collecting data. The team has assumed that LRO will be visible for an entire viewing period when all of the penetrators have landed. This will ensure that the maximum amount of data can be transmitted back to mission control. The penetrators utilize a UHF transceiver to send data at 2 kbps. Each penetrator will generate 300 MB of data for the life of the mission, and can transmit 0.072 MB of data every time LRO is visible. The penetrators have the capability of storing data for periods when LRO is not visible. The life of each penetrator is estimated to be a year.
2.10.4 Lander Concept of OperationsThe lander ConOps is broken in to two phases. The first phase is the descent, LPES deployment, and landing phase and the second phase is the surface mission. The first phase will take place above the lunar surface and will mostly consist of GN&C and LPES Deployment. Once Daedalus is 5 kilometers from the lunar surface and approximately 2.5 kilometers from the rim of the Shackleton Crater, the GN&C system will take over control of the lander. This includes the LiDAR, DSMAC, IMU, flight computer, MPS, and ACS. DSMAC will ensure proper location above permanently dark region of interest. At this time, at the 5 kilometer mark, 16 penetrators will launch into the permanently dark region of the crater. This will satisfy the customer requirement of 15 samples in the permanently dark region. Daedalus will then use the MPS and ACS to transverse over to the designated landing site while descending from the 5 kilometer mark down to 3 kilometer. During this time the DSMAC will continue imaging the lunar surface to correlate the stored landing location image to ensure that the lander is in the designated range. At the 3 kilometer mark, 6 penetrators will deploy for the lighted region of lunar surface. This will satisfy the requirement of 5 samples in the lighted region. There are two extra penetrators to account for any issues during launch and landing. The launch mechanism for the LPES will utilize a
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
35

spring-loaded system with shear bolts to release the pre-tensioned springs. Each penetrator will be positioned in tubing that is angled at the correct orientation to achieve the required 500 meter distance per sample site.
During the descent period, the LiDAR will scan the landing site to avoid any unforeseen obstacles. The LiDAR will also be responsible for calculating the angle of the lunar surface and adjust Daedalus accordingly to ensure that safe landing is achieved. The DSMAC system will ensure that Daedalus will land at the correct location. Once the lander has been positioned 5 meters above the target, the computer will send a signal to the MPS to shut down. This will create the hard landing designed to reduce lunar dust disturbance from the thrusters. The entire landing sequence will take approximately 3 minutes from 5 kilometers to landing. This completes the landing phase of the mission. The GN&C system is shut down, and power is diverted to other subsystems. The next phase begins once Daedalus has landed on the lunar surface. After Daedalus has landed and time has been allotted for dust settlement, the 3 solar panels will unfurl and position for optimal sunlight exposure. This will start power generation for Daedalus and begin recharging the 15 lithium-ion batteries. For the lunar night, the power system will provide power to accommodate all communication, payload and power systems efforts for about 3 hours and 21 minutes per lunar night. This is based on a 1.25% duty cycle for the lunar night power system. The thermal system will operate on a power cycle. The thermal system will work to expel most of the heat generated during the lunar day, and conserve heat generated during the lunar night. For the lunar night, the thermal system will need to be on 10 percent of the time to maintain the optimal temperature for component survival. Once sufficient power has been converted, the scientific research for Daedalus will begin. The observations will consist of measuring micrometeorite flux, determining lighting conditions every two hours, and assessing electrostatic dust levitation with the correlation to lighting conditions. The lighting conditions will be measured every 2 hours per scientific requirement, and will use the efficiencies of the solar cells and the camera system to verify the data.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
36

Figure 7: Daedalus Concept of Operations
2.11 Systems Interactions
The subsystems of Daedalus interact several ways. The team designed the lander to minimize the interactions between the different subsystems. This was done to simplify the design, and increase the flexibility of Daedalus. The idea to minimize the design, along with using OTS hardware, was created to overcome the short time table for creating the design.
The design took advantage of the low size restrictions to increase the size of the rover. It also reduces the interaction of many of the systems, by allowing plenty of room for each of the subsystems. The structure of the rover is similar to an automobile. It has a long frame and a wide body. The frame allows for plenty of room on top for the subsystems to be placed. This reduced the size requirements on the individual subsystems and allowed for a greater level of freedom for the individual designers to design the system without having to spend large amounts of time working out exact dimensions early on. As a result, the designers could work out their parts without concern that the subsystems would physically contrast with each other. This change did require a trade of mass to increase the size of the rover, but considering time constraints, it was decided to be the best method.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
37

The power system provided the most subsystem interactions for the Daedalus concept. Nearly all subsystems require power to operate effectively. The commands for providing power to parts of the spacecraft are carried out by the power distribution center. One interaction is that the batteries required a specific thermal environment to be maintained for maximum operations. While generating, the batteries also introduced a great amount of heat into the system. This had to be mitigated through the thermal system.
The communication system also has several issues with interference. The antenna must be able to point at the satellite in order to transmit to Earth and must also be on the top of the lander.
These are the interactions address by the system design. Many things were done to reduce the level of negative interaction of the different subsystems and take advantage of some of the systems interactions.
3.0 Implementation Issues
3.1 Schedule
Table 8: Daedalus Activity Plan
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
38

3.2 Hardware Nearly all of the Daedalus lander utilizes OTS technology and is at the required TRL 9 level. This will minimize the need for additional hardware development. Time will be needed to fabricate and assemble the Daedalus lander, however this is estimated to take 6 months. The LUNAR-A penetrators that are used for LPES will require additional development and testing. Considerable design work and testing has already been conducted for the LUNAR-A penetrators. The research and testing will allow Team LunaTech to accelerate the completion of the design, currently at TRL 7 to TRL 8 or 9. This will require some funding to cover the cost of additional testing and design work, however this is estimated to be far less expensive than other alternatives, such as nuclear powered rover or lander-on-wheels.
4.0 Company Capabilities
4.1 Company Overview LunaTech consists of a diverse group of young engineers with various backgrounds in nationality, discipline and education joined together to produce superior designs for our customers. Two of the members have a permanent location outside of Paris, France at ESTACA and specialize in fluid dynamics and structures. The American members specialize in mechanical, electrical, industrial, and aerospace engineering. LunaTech also has the pleasure, good fortune, and opportunity to call upon many field professionals that include, but are not limited to, mentors and professionals in their fields and disciplines.
LunaTech has utilized many tactics for staying in contact with the members of the group. Bi-weekly, face-to-face meetings are held for the local members. During these meetings, disciplines report on progress, problems, and new information for the team to consider and work on together. These meetings are crucial to maintain a group that functions together and complies with their system requirements. Communication between the group as a whole takes place daily by way of e-mail, teleconferencing, team bulletin boards, and a group site that allows the members to post files and alert other members of changes or improvements.
Throughout Phase 1 and parts of Phase 2 and 3, individual disciplines within each group worked together with mentors and each other for direction. This allowed for LunaTech members to become proficient in their discipline in an accelerated time frame, which in turn was a benefit to the group and the design process. The team leader worked with the team leaders of the competing companies to question the customer and become comfortable with all of the requirements. Assistance from the team members based in France was crucial during all phases of production. They provided the team with drawings and analysis that initially proved the incompetence of the Baseline Design. Through the final phases, they provided assistance with analysis on the selected design. Throughout the final weeks of the last phase, each discipline stayed in constant contact with their mentors in order to guarantee quick turnaround on any questions and issues. Through hard work, dedication, and perseverance, LunaTech was able to generate a working design quickly and completely.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
39

4.2 Personnel Description Listed below are the primary members of LunaTech. Beneath each of their names and titles are highlights to the assistance that they brought to the team, and the contributions that they made.
Mr. Nicholas Case– LunaTech Team LeaderMr. Case was in charge of coordinating weekly meetings for LunaTech. Also, he was instrumental in the overall vision for the project, and assigning various task for each subsystem.
Mr. Morris Morell – LunaTech Systems EngineerMr. Morell was in charge of ensuring that Daedalus was compliant with the requirements and recommendations of the customer. He was also instrumental in integrating all components for Daedalus. He was also helpful in designing the structural system for Daedalus and creating a 3-D CAD model of Daedalus.
Mr. Travis Morris – LunaTech Guidance, Navigation, and Control EngineerMr. Morris was a valuable asset to LunaTech for this project. He developed the entire GN&C subsystem for Daedalus. Mr. Morris used unconventional ideas to create a very unique and robust GN&C design. Mr. Morris was a major reason that the Daedalus concept was a success.
Mr. Greg Barnett – LunaTech Thermal EngineerMr. Barnett expressed great interest in the thermal system design for LETS from the start of the program. His work ethic and love for thermal design proved invaluable for this project. Without his in depth design, Daedalus would not be able to meet the objectives given by the customer.
Mrs. Katherine Tyler – LunaTech Power Systems EngineerMrs. Tyler was part of the power systems team. Without the dedication of this team, LunaTech would be in a struggle to ensure that the design would meet the requirements of the customer. Mrs. Tyler was also instrumental in the design of the team presentations, and the team display, which won first place in the IPT 2008 Open House competition.
Mr. Adam Garnick – LunaTech Power Systems EngineerMr. Garnick was also part of the power systems team. Mr. Garnick brought a lot of energy to the team, and gave tremendous effort to completing the design. Mr. Garnick’s technical expertise in power systems, allowed Daedalus to survive for the entire mission length.
Mr. John Grose – LunaTech Payload Systems EngineerMr. Grose was in charge of designing the lunar penetrator concept for Daedalus. Mr. Grose brought his hard work ethic and spacecraft design to the team and was very
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
40

instrumental in creating a great product for the customer. Mr. Grose was also instrumental in creating the winning team display for IPT 2008 Open House.
Mr. Adam Fanning – LunaTech Communications EngineerMr. Fanning was in charge of designing the communications architecture for Daedalus. His work ethic and mellow attitude allowed him to create a great design and was very helpful in brainstorming sessions.
Mr. Thomas Stewart – LunaTech Structural EngineerMr. Stewart was in charge of the structural design of Daedalus. His hard work ethic and design capabilities were instrumental in producing a robust and flexible structural design.
Mr. Julius Richardson – LunaTech Concept of Operations SpecialistMr. Richardson was in charge of developing the operations schedule for the entire length of the mission. Julius was also in charge of developing requirements for the rover design. Without his help, achieving the scientific goals of the mission would not be possible.
Mr. McArthur Whitmore – LunaTech Mobility SpecialistMr. Whitmore was in charge of developing the robotic rover for the Daedalus concept. He was instrumental in relaying information between LunaTech and Southern University.
Mr. Robert Danso – LunaTech Mobility SpecialistMr. Danso was in charge of developing the robotic rover for this concept. He was a valuable addition to our team.
Mr. Sebastien Bouvet – LunaTech Sample Return Vehicle SpecialistMr. Bouvet was in charge of developing the Sample Return Vehicle for the Daedalus concept. The SRV added great scientific flexibility to the overall design.
Ms. Julie Monszajin– LunaTech Sample Return Vehicle SpecialistMs. Monszajin was in charge of developing the Sample Return Vehicle for the Daedalus concept. The SRV added great scientific flexibility to the overall design
5.0 Summary and Conclusions
The purpose for Phase 2 was to develop two alternatives to the baseline design and use an engineering selection system to pick the better concept. Team LunaTech used a true systems engineering approach to begin outlining all options, determining concepts, and selecting the best concept. From this process, two alternatives, Lunar Prowler and Daedalus were created based upon the Level 1 Requirements and Figures of Merit. Team LunaTech used Pugh’s Selection Criteria to grade each concept and select the winning concept. Each concept had a unique structural design: Lunar Prowler employs a land on wheels concept similar to the Mars Science Laboratory design; Daedalus uses a four-legged lander with a mobility concept attached. Each concept had a unique power design: Lunar Prowler uses a nuclear power supply to power all of its subsystems and allow it to explore the permanently dark areas
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
41

needed to satisfy the scientific goals of the mission; Daedalus utilizes a solar cell and lithium-ion battery system to power all of the required subsystems. However, this limits its ability to land in permanently dark areas. Therefore, a unique strategy of launching lunar penetrators to the dark sites was created to overcome this limitation.
The better concept was determined to be Daedalus. This concept was chosen because of its efficiency, cost, the absence of a nuclear power source, and ability to meet the required launch date of September 30, 2012. A major design feature that led to the selection of Daedalus was the power system. Although a nuclear power source would solve many of team’s design issues, early calculations and research has shown that it is not a feasible option. This is for several reasons, such as cost, weight, and schedule. The Daedalus design will allow for successful completion of the year-long mission, and could be capable of extending its life to achieve more scientific goals.
The purpose of Phase 3 was to fully develop the subsystems for Daedalus, design an appropriate ConOps, and create Level 2 Requirements to continue the design further. The Daedalus lander was designed to achieve the mission goals envisioned by the customer. Starting with the initial trade studies of each subsystem, the team designed the lander with the requirements in mind. The Daedalus draws from the experience developed over the years and utilizes several systems currently used on other landers and spacecraft.
The Daedalus ConOps provides the mission plan for Daedalus. The team has determined the actions for the landing sequence, penetrator deployment, and mission lifetime. The detailed mission script will allow Daedalus to complete the mission quickly, while conserving resources as much as possible.
The Daedalus scientific payload utilizes the Lunar Penetrator Exploration System based on the LUNAR-A penetrator, and a single site science box to satisfy the requirements of the customer. This was determined to be the most effective way to explore the lunar surface using the given resources. Daedalus will launch 16 penetrators in the permanently dark region, and 6 penetrators in the permanently lit region. Each penetrator will provide valuable science data for the entire length of the mission.
The thermal control subsystem employed in the Dadelus Lander is intended to provide a stable thermal environment in which mission critical equipment and components are maintained at acceptable operating temperatures. The thermal control subsystem supplies a means of dissipating unwanted heat during the sustained hot period and a method of generating and retaining internal heat during the sustained cold period. Both passive and active systems are employed and thus the thermal control subsystem design is referred to as a semi-passive approach. The passive components of this system are multi-layered insulation blankets, variable conductance heat pipes (actually semi-passive), paints/coatings, thermal switches, and variable radioisotope heater units. The major active components of the subsystem are the solid-state controlled heaters.
The Daedalus power system was the most critical subsystem for the design. It utilizes the power system designed for the Venus Express and Mars Express orbiters. The power IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
42

production will be done from 3 solar panels to produce the power needed to conduct all the required science during the lunar day and store power in the space-rated lithium-ion batteries. During the lunar night, these batteries will provide the power needed to run the essential systems for survival. These include: thermal control, minimum scientific research, and communications. These systems will operate on specific duty cycles to minimize the impact on the power allowances.
The Daedalus guidance, navigation, and control system provides a completely autonomous landing sequence for the vehicle. All starting points, checkpoints, penetrator launch points, and landing points are all determined before launch, and are based on accurate LRO pictures and mapping. The system will utilize IMUs for attitude control and horizontal maneuvers, LiDARs for altitude control and hazard avoidance, and two DSMAC systems to provide precise latitude-longitude location. These sensors all feed signals into a guidance computer and processor, which then determines the correct signals to send to the main propulsion engines, as well as the ACS. The overall system provides the high accuracy that is critical to successfully completing the mission.
The Daedalus communications system is based on the Mars Exploration Rover design. The system consists of a Ka and UHF band transceiver. This provides Daedalus with a redundant system of two antennas and two transceivers. The Ka-band system is used to uplink data to LRO for transmission back to mission control. The UHF system is used to download transmissions and data sent from mission control. The UHF system can also be used as a transmitter if the Ka-band system fails. This ensures that data will reach the customer throughout the life mission. The Lunar Penetrators utilize UHF to receive and send data from each site. This design was based on its low mass penalty and robust design.
The Daedalus structures subsystem was analyzed to support the scientific payload and to withstand the forces experience during launch and landing. Careful consideration was given to selection of materials. This was to ensure the lander’s survivability in all of its extreme environments. A 3-D model was developed of the Daedalus structure and analyzed using Nastran and Patran. This provided detailed anaylsis of the entire structure and ensured that the design would withstand the rigors of the lunar mission. Future work could include more detailed models of the structure and a full simulation of the Daedalus model to increase the accuracy of current calculations.
Although the mission to the Shackleton Crater was the main focus of this project, Team LunaTech has envisioned a series of Daedalus missions to support the Lunar Precursor Robotics Program for NASA. The Daedalus Vision utilizes the exploration progress conducted for Mars as a lunar exploration roadmap. The Daedalus Vision builds upon the current lunar exploration missions and increases the overall capability of the program. By using a simple yet powerful and adaptable lander, LunaTech can provide LPRP with a very robust and low-cost platform to expand the current capabilities of lunar exploration. This is the Daedalus Vision, and the mission of Team LunaTech.
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
43

6.0 Recommendations
Power:
Design short circuit protection for PCU. Design the PCU with radiation protection for the Microprocessor. Design a smaller honeycombed area for each individual solar cell to allow for a
denser cell packing, reducing the total surface area required. Determine the exact power consumed by the switching systems for a total loss of
power.
Thermal:
Heat pipe analysis needs to be conducted that involves a more detailed investigation of heat transport limitations such as capillary limit, boiling limit, entrainment limit, and condenser heat transfer limit.
The effective thermal conductivity of the variable conductance heat pipes needs to be analyzed further in order to determine how many watts can be extracted from the controlled environment.
More information concerning the use of the Radioisotope Heater Units needs to be considered, i.e. Procurement, environmental concerns, and post-mission disposal. Additional analysis for the radiator surface temperatures needs to be done in order to achieve a more accurate estimation of radiative emissive power
Guidance, Navigation, and Control:
Research and development is currently being done on incorporating a DSMAC system into space vehicles, actually numerical accuracy has yet to be determined.
Bore site errors may be an issue with the DSMAC system More research on specific navigation computer model is needed
Communication:
Additional Analysis of satellite tracking system A dedicated communications satellite on a molyina orbit for maximum
communication time.
Structures:
Utilize new light-weight materials to reduce weight and increase strength Investigate the use of other titanium alloys for use in the structure Utilize effecting welding technique for titanium
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
44

Appendix A - Concept Description Document
1. Scope. This document outlines the specifications for the Lunar Exploration Transportation System (LETS). The LETS project is to develop a lunar lander mission for NASA that provides the flexibility to conduct different scientific investigations and technology validation tasks at different areas on the Moon’s surface. For this study only one lander is envisioned. The mobility of the lander system is subject to trade. For the purposes of this project, the mission begins with terminal descent. The project goal is to design the transportation system to accomplish the scientific and technology objectives, not the science and technology itself.
2. Customer Requirements. The following requirements were given by the customer as Level 1 Requirements.
2.1. The LETS shall use an Atlas V-401 EPF shroud configuration with a total landed mass of 997.4 kg.
2.1.1. The LETS shall be designed so that 64.6 kg of the total landed mass is devoted to the propulsion system dry mass. Table 1 details this mass allocation to the propulsion subsystems.
2.1.2. The LETS propulsion system shall be designed to accommodate 159.5 kg of hydrazine (N2H4) propellant and 2.0 kg of helium. The propellant shall be housed in two spherical propellant tanks, each 0.55 m in diameter. The helium shall be housed in 2 spherical tanks, each 0.4 m in diameter.
2.1.3. The LETS propulsion system shall be designed for two (2) MR-80B monopropellant liquid rocket engines.
2.1.4. The LETS attitude control system shall be designed for twelve (12) MR-106 monopropellant thrusters.
2.2. The LETS shall be designed for its first mission to be at a polar location.2.3. The LETS shall be designed with the capability to land at other lunar locations.2.4. The LETS shall minimize cost across the design.2.5. The LETS shall launch to the Moon NLT September 30, 2012.2.6. The LETS shall have the capability to move on the surface.2.7. The LETS shall be designed to survive for one year on the surface of the Moon.2.8. The LETS shall survive the proposed concept of operations.2.9. The LETS shall be capable of meeting both the Science Mission Directorate (SMD)
and the Exploration Systems Mission Directorate (ESMD) objectives.2.10. The LETS shall land to a precision of ± 100m 3 sigma of the predicted location.
2.10.1. The LETS shall provided guidance, navigation, and control for the terminal descent phase, beginning at 5 km above the surface of the Moon.
2.10.2. The LETS shall not be responsible for hazard avoidance.2.11. The LETS shall be capable of landing at a slope of 12 degrees (slope between
highest elevated leg of landing gear and lowest elevated leg).IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
45

2.12. The LETS shall be designed for g-loads during lunar landing not to exceed the worst case design loads for any other phase of the mission (launch to terminal descent).2.12.1. The LETS shall be designed to withstand g-loads with respect to
stiffness only.2.12.2. The LETS design shall not be concerned with frequency responses or
frequency loads.
3. Concept Design Constraints. The following constraints are placed on the LETS design.
3.1. The LETS shall be designed to interface with the Atlas V-401 EPF shroud configuration launch vehicle per the Atlas Launch System Mission Planner's Guide, Rev 10a, January 2007, and CLSB-0409-1109.
3.2. The LETS shall be designed to survive the lunar cruise environment for up to 28 days per NASA Technical Memorandum 82478, Space and Planetary Environment Criteria Guidelines for Use in Space Vehicle Development, Volume 1. Including but not limited to the following environment obstacles3.2.1. Radiation3.2.2. Thermal3.2.3. Micrometeoroids
3.3. The LETS shall be designed to survive the lunar surface environment at both the polar and equatorial regions.3.3.1. This includes temperatures ranging from 107 Celsius to -223 Celsius3.3.2. Including conditions stated in section 3.2
3.4. The LETS shall maximize the use of off-the-shelf technology. Off-the-shelf technology shall have a technology readiness level of 9.3.4.1. Readiness of level 9 states it is an actual “Flight Proven” system
through successful mission operations.3.5. The LETS shall be designed to accomplish the maximum surface objectives outlined
below.
4. Figures of Merit. The following Figures of Merit (FOM) will be used to evaluate the LETS design concepts.
4.1. Number of surface objectives accomplished (as outlined below)4.2. Percentage of mass allocated to payload4.3. Ratio of objectives (SMD to ESMD) validation (2 to 1 being the goal)4.4. Efficiency of getting data in stakeholders hands vs. capability of mission4.5. Percentage of mass allocated to power system4.6. Ratio of off-the-shelf hardware to new development hardware
5. Surface Objectives. The following surface objectives were provided by the customer.
5.1. Single site goals - Geologic context
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
46

5.1.1. Determine lighting conditions every 2 hours over the course of one year
5.1.2. Determine micrometeorite flux5.1.3. Assess electrostatic dust levitation and its correlation with lighting
conditions5.2. Mobility goals
5.2.1. Independent measurement of 15 samples in permanent dark and 5 samples in lighted terrain
5.2.2. Each sampling site must be separated by at least 500 m from every other site
5.2.3. Minimum: determine the composition, geotechnical properties and volatile content of the regolith
5.2.4. Value added: collect geologic context information for all or selected sites
5.2.5. Value added: determine the vertical variation in volatile content at one or more sites
5.2.6. Assume each sample site takes 1 Earth day to acquire minimal data and generates 300 MB of data
5.3. Instrument package baselines5.3.1. Minimal volatile composition and geotechnical properties package,
suitable for a penetrometer, surface-only, or down-bore package: 3 kg5.3.2. Enhanced volatile species and elemental composition (e.g. GC-MS):
add 5 kg5.3.3. Enhanced geologic characterization (multispectral imager + remote
sensing instrument such as Mini-TES or Raman): add 5 kg
Propulsion Dry Subsystem Mass
Subsystem Number Mass/Unit (kg) Total Mass (kg)Propellant Tank 2 5.1 10.2
Helium Tank 2 5.2 10.4Helium 2 1.0 2.0
Main Engine 2 7.9 15.8ACS Thruster 12 0.5 6.0Components 1 14.1 14.1Contingency 1 6.1 6.1
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
47

Appendix B - Project Office
Table 9: Initial Mass Estimates for Daedalus
Given Mass Values from CDDSystem Mass (kg) % of Total Mass
Total Landed Mass 997.4 100.00Propulsion Dry Mass 64.6 6.48
Propellant Mass 159.5 15.99Helium 2 0.20
Sample Return Vehicle 250 25.07Lander Dry Mass 932.8 93.52
Initial Mass Budget Derived from Historical Percentages
Element of Weight Budget
Est.% of Lander Dry Mass
Est. Mass Based on Col. (1) (kg)
Payload 40 373.1Structures and Mechanisms 15 139.9
Thermal 5 37.3Power 17 158.6GN&C 2 18.7
Communication 2 18.7Propulsion (dry) 7.7 64.6
Margin (kg) 11 102.6Total Lander Dry Mass 100 913.4
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
48

Table 10: Initial Power Estimates for Daedalus
Given Mass and Power Values for Payload UnitsUnit Mass (kg) Power (W)
Stereo Imaging System (SIS) 0.8 6Mast (SIS) 3.5 9.5
Drill and Drill Deployment 20 30Arm 13 43
Scoop 0.7 0Penetrator 1 0
Mass Spectrometer 19 75XRD/XRF 2 10
Total 60 173.5Initial Power Budget Based on Payload Power Requirements
SystemEst. % of
Lander PowerEst. Power Based on Col.
(1) (W)Total Budget 100 700
Payload 24 168Structures and Mechanisms 1 7
Thermal 25 175Power 5 35GN&C 18 126
Communication 17 119Margin 10 70Total 100 700
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
49

Appendix C - Systems Engineering
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
50

IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
51

Appendix D - Power
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
52

GNC 126W
Communication 119 W
Thermal 151W
Payload 168W
Powersys 35 W
Structmech 7 W
Estimated mass of batteries...................
calculate W*hr of usage........
14 days = 336 hours......
systems at 10% during dark= power, thermal......
T1 336 .10( ) hr 33.6hr estimate 10% duty cycle
systems full on 1.25% duty cycle of dark = payload, communication, etc......
T2 336 .0125( ) hr 4.2 hr estimate 1.25% duty cycle...
System1 Thermal Powersys 186W
System2 Payload Communication( ) 287W
E1 System1 T1 6.25 103 W hr
E2 System2 T2 1.205 103 W hr
Assume only minimal communication and heating needed for the dark period.
C E1 E2 7.455 103 W hr
Battery Sizing for this assumption...all are rechargable secondary batteries.......
Li-Ion: mbattery1C
114.627W hr
kg
mbattery1 65.037kg
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
53

Batteries..................... .
Length 248mm 9.764inSony 18650HC Lithium-Ion cells Cells 96
6 cells per battery string16 strings per battery 96 cells per battery.5.6 Wh per cell
Width 187mm 7.362inCellenergy 5.6 W hr
Height 91 mm 3.583inMass battery 4.69kg
What is the specific energy of the Sony 18650HC Li-Ion battery?
SpecificEnergyCells Cellenergy
Mass battery
SpecificEnergy 114.627W hr
kg
Cellcapacity 1.5 A hr
Cellenergy Cells Cellcapacity 144A hr
Cellenergy16
9 A hr
Power 902W
voltage 16 V to 25.2 volts........
NOTE: This 56.275 A Current is double thecurrent allowed by the standard 28V BUS!Current
Powervoltage
56.375A
How many batteries will we need for 14 days of Darkness?
m1C
SpecificEnergy m1 65.037kg
Numbatteriesm1
Mass battery Numbatteries 13.867
ANSWERE: We require 14 batteries to last14 days in total darkness.........
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
54

Solar Cell/Array Calcs....... .
Lengthpannel 1.778m Pannelmass 20.25kg
Widthpannel 0.8m
Thickness .01m
Added 1.4m2 NOTE "Added" is the additional area required for the cells to bechained and to be wired together..........
Pannel 1 and 2........
Numberstrings 12
Numbercellsperstring 22
Totalcells Numberstrings Numbercellsperstring 264
Powerp1 410W
Mass pannel1 20.25kg Areapannel1 1.778m .8 m Added 2.822m2
Pannel 3..........
Powerp3410W
5L3
1.778m5
0.356m
Mass pannel320.25kg
54.05kgW3
0.8m5
0.16m
Added31.4 m2
50.28m2 Areapannel3 L3 W3 Added3 0.337m2
Totalareapannel Areapannel1 2 Areapannel3 5.982m2
Mass pannels Mass pannel1 2 Mass pannel3 44.55kg
Totalpowerpannel Powerp1 2 Powerp3 902W
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
55

Specific Characteristics of Power Support System......
Power 902WDegridation 3%yr
voltage 16 V to 25.2 volts........Solarconstant 1367
W
m2
CurrentPowervoltage
56.375A
Estimation for the mass of the wiring.....
Mdry 950kg
Mw 0.02Mdry 19kg
Estimate Mass of the Power Control Unit (PCU), based upon Venus Express.......
Mpcu 8.2kg 8.2kg .5( ) 12.3kg
Prc 0.2kgW
Power 0.2( ) 36.08kg
Mass support Mw Mpcu Prc 67.38kg
Error Mass support 0.10 6.738kg
Totalsupport Mass support Error 74.118kg
NOTE 10% mass was added to the PCU forunexpected additions.....
Totalsystem Totalsupport m1 Mass pannels 183.705kg
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
56

Appendix E - Guidance, Navigation, and ControlDaedalus Calculations for LPES Deployment
Lunar Velocity Calculations:
Diameter of Moon:
Dm 3474km
Moon Circumference:
Cm 2Dm2
Cm 10913.9km
Rotation of the moon:
Onerev 28day
Rotation Velocity of the moon:
mvelCm
Onerev4.5
ms
ACS Thruster Analysis:
FMPS 2 5lbf( ) 44.482N t 3min
Mass of Lunar Penetrators
mpenetrator 16 14 kg 224kg
Mass of Daedalus after Penetrator Deployment in Darkness
mDaedalus 830kg mpenetrator mDaedalus 606kg
Maximum Distance Available to Travel above Shackleton Crater
Given
alander 9m
s2
FMPS mDaedalus alander
alander Find alander 0.073m
s2
dhorizontal mvel t12
alander t2 2 km
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
57

6U CompactPCI single-board computer6U availability: Available nowSupports variable-memory configurations
SRAM: 16 MBytes standard with options to 48 Mbytes and ECCDevice sparing
SUROM: 64 KBytes + ECCEEPROM for engineering (256 KBytes)PROM for flight units (64 KBytes)
EEPROM: 4 MBytes + ECC
6U specifications
Form factorCompactPCI 6U (233 mm x 160 mm)Weight: 1000 to 1220 grams, varies with memory
Memory16-48 MBytes RHSRAM,4 MBytes EEPROM
Radiation-hardnessTotal dose: >100 Krad (Si)SEU: 1.9 E-4 errors/card-day (90% W. C. GEO)varies with orbitLatchup: Immune
Performance>260 Dhrystone 2.1 MIPS @ 132 MHz4.3 SPECint95 4.6 SPECfp95 at 132 MHz
Power supply5V ± 10% and 3.3V ± 5%(2.5V generated via onboard regulator)
Power dissipation11-14W
Rail temp range-28°C to +70°C
IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
58

IPT D:Current as of May 8, 2023This document is subject to the disclaimer printed on title page.
59

IPT _Current as of May 8, 2023 60

Appendix F - Thermal
Ambient Temperature: -173 degC
Worst-Case Cold Scenario
1-D, Steady State Analysis
Information: kal 185.2wattm K
tins 1in tal18
in Ti 20 273( )K L 6in
kins_eff 2.5 10 5BTU
hr ft R kins_eff 4.327 10 5
wattm K
To 60K Tinf 50K
Tsur 100K Eheater 80watt A 20.5m2 tins 0.025m tal 3.175 10 3 m
Calculation of Cross-Sectional Area of Supports: Assumed 8 aluminum rods of 0.25in radius
r 0.25in Arod r2 rods 8 Ac Arod rods
Ac 1.013 10 3 m2 Cross-Section of all supports
Effective Emittance:
fA1
100.373 log 3( ) fA 0.664 fN 1.164 For 15 layers
fP 1.322 For 2% Penetrations
Th 293 Tc 130
Tm
3Th
4 Tc4
4 Th Tc Tm 221.489 5.6710 8
eff 0.0001361
4 Tm2
0.000121Tm0.667
fN fA fP eff 0.017
Thermal Resistance: Rtotaltal
kal A
tinskins_eff A
Rtotal 28.636K
watt 5.6710 8
watt
m2 K4
IPT _Current as of May 8, 2023 61

Energy Balance:
ERHU 50watt
Given
Ti To
Rtotaleff A To
4 Tsur4
Eheater ERHUTi To
Rtotalkal Ac
Ti To
L
To
Eheater
Find To Eheater To 134 °C Temperature of outside surface
Erequired Eheater
Erequired 145watt Power required to maintain 20C inside vehicle
IPT _Current as of May 8, 2023 62

Ambient Temperature: 100 degC / 373 K
Worst-Case Hot Scenario
1-D, Steady State Analysis
Albedo Assumed Negligible
Information: kal 185.2wattm K
tins 1in tal18
in L 6in Gsolar 1368watt
m2
kins_eff 2.5 10 5BTU
hr ft R kins_eff 4.327 10 5
wattm K
Ti 20 273( )K Tsur 373K
A 20.5m2 tins 0.025m tal 3.175 10 3 m mli 0.15 mli 1 mli
Effective Emittance for MLI:
fA1
100.373 log 3( ) fA 0.664 fN 1.164 For 15 layers
fP 1.322 For 2% Penetrations
Th 373 Tc 293 Hot and Cold Side Temperatures
Tm
3Th
4 Tc4
4 Th Tc Tm 334.594 5.6710 8
eff 0.0001361
4 Tm2
0.000121Tm0.667
fN fA fP eff 0.011
Thermal Resistancefor Conduction:
Rtotaltal
kal A
tinskins_eff A
Rtotal 28.636K
watt 5.6710 8
watt
m2 K4
IPT _Current as of May 8, 2023 63

Energy Balance:
To 489K
ERHU 50watt
EVCHP 150watt
Given
To Ti
RtotalmliGsolar A eff A To
4 Tsur4
ERHUTo Ti
Rtotal EVCHP
To
EVCHP
Find To EVCHP To 489°C Temperature of outside surface
EVCHP 66watt Power that must be removed from cabin by VCHPs tomaintain 20 degC
IPT _Current as of May 8, 2023 64

Appendix G - Structures
Table 11 : Material Properties For Materials Used in the Daedalus
MaterialDensity
(kg/m^3)
Young's Modulus
(Gpa)
Yield Strength
(Mpa)
Thermal Expansion (m\m*K)
6061-T6 Aluminum 2800 68 276 23.6
6AL-4V Titanium 4400 110 825 9
Material properties obtained from www.matweb.com
IPT _Current as of May 8, 2023 65

Figure 8: Design Check of Vertical Member Using Von Mises Stress Criterion
IPT _Current as of May 8, 2023 66

Figure 9: Design Check of Horizontal Member using Von Mises Stress Criterion
IPT _Current as of May 8, 2023 67

Figure 10: Design Check of Landing Leg Strut Using Von Mises Stress Criterion
IPT _Current as of May 8, 2023 68

Yield Stress for 6061-T6
σyield 276MPa
FSσyield
σcompressive
FS 12.425
Young's Modulus Effective Length Radius of GyrationE 68GPa Leff .305m r .025m
Cross-sectional Area of the horizontal beam
A 4.032 10 4 m2
Compressive Stress Applied Force
σcompressiveForce_per_member
A Force_per_member 4.478 103 N
Actual Stress Applied
σcompressive 1.111 107 Pa
Yield Stress for 6061-T6
σyield 276MPa
Factor of Safety
Maximum Stress Allowed
FSσyield
σcompressive
FS 24.85
IPT _Current as of May 8, 2023 69

mass 997 kg delta_velocity 4ms
delta_time 5ms
Force massdelta_velocity
delta_time
Force 7.976 105 N
Force_per_memberForce
4
Force_per_member 1.994 105 N
Force_applied_to_strutForce_per_member
sin 60deg( )
Force_applied_to_strut 2.302 105 N
IPT _Current as of May 8, 2023 70

Young's Modulus Effective Length Radius of GyrationE 68GPa Leff .305m r .025m
Critical stress for column buckling
σcritical Eπ2
Leffr
2
σcritical 4.509 109 Pa
Cross-sectional Area of the Landing Leg Strut
A 7.297 10 4 m2
Compressive Stress
σcompressiveForce_per_member
A
σcompressive 2.733 108 Pa
Yield Stress for 6061-T6
σyield 276MPa
σultimate 310MPa
Applied Force
Force_applied_to_strut 2.302 105 N
Factor of Safety
Maximum Stress Allowed
σcritical 4.509 109 Pa
Actual Stress Applied
σcompressive 2.733 108 Pa
IPT _Current as of May 8, 2023 71

Factors of Safety Calculations
FSσcritical
σcompressive
FS 16.501
FSσyield
σcompressive
FS 1.01
FSσultimate
σcompressive
FS 1.134
IPT _Current as of May 8, 2023 72

Appendix H - PayloadTable 12: LPES Impact Velocity
Ground Depth (m)/ Mass (kg) 2 5 10 14 15 20 30 40 500 30.50 30.50 30.50 30.50 30.50 30.50 30.50 30.50 30.50
0.5 469.98 261.91 172.95 143.06 137.75 118.19 96.52 84.48 76.671 909.46 493.32 315.40 255.61 245.00 205.88 162.54 138.46 122.84
1.5 1348.94 724.73 457.85 368.17 352.25 293.56 228.56 192.43 169.022 1788.42 956.14 600.30 480.73 459.50 381.25 294.58 246.41 215.19
2.5 2227.90 1187.55 742.75 593.28 566.75 468.94 360.60 300.39 261.363 2667.38 1418.96 885.20 705.84 674.00 556.63 426.62 354.37 307.53
3.5 3106.87 1650.37 1027.65 818.40 781.25 644.32 492.64 408.35 353.714 3546.35 1881.78 1170.10 930.95 888.50 732.00 558.66 462.33 399.88
Ground Depth, D, (m) Impact Velocity (m/ s) G-Force0 30.500
0.5 143.057 2086.1591 255.613 3330.183
1.5 368.170 4605.8172 480.727 5889.353
2.5 593.283 7176.0503 705.840 8464.327
3.5 818.397 9753.5074 930.953 11043.252
Impact Velocity, V, (m/ s)
Lunar-A
IPT _Current as of May 8, 2023 73

Impact Velocity
0.00
500.00
1000.00
1500.00
2000.00
2500.00
3000.00
3500.00
4000.00
0 0.5 1 1.5 2 2.5 3 3.5 4
Penetrator Depth
Impa
c Ve
loci
ty
2 kg 5 kg 10 kg
14 kg 15 kg 20kg
30 kg 40 kg 50 kg
Figure 11: LPES Impact Velocity
Figure 12: LPES G-Force Calculation
IPT _Current as of May 8, 2023 74

Appendix I - Communications
Daedalus Communications Architecture:
Knowns:
Power 119W Mass 18.7kg
1. Identify Data Sources: Lander, Rover, and Penetrators2. Identify data end-users: Customer and Principal Investigator3. Deterime data per unit time: 300 MB/day per site4. Determine Contact Time
Contact time for LRO:During its mapping phase LRO will be in a 50km circular orbit.
m 4902.8km3
s2 a 50km 1737.4km
nm
a3 n 9.266 10 4
rads
P2n
P 113 min
Assumed Field-of-View based on Dr. Cohen's Calculations
Fview 5min
Total Amount Data Expected From Mission Daily
TData 30020 6000 MB per day
IPT _Current as of May 8, 2023 75

Data rates for each link
Lander-to-LRO Data Link: Ka-band
f1 25.25GHz
wavelength:
λ1cf1
λ1 0.012m
R 100Mbps Mbps
LRO-to-Earth Data Link: Ka-band
f2 25.25GHz
wavelength:
λ2cf2
λ2 0.012m
R 100Mbps Mbps
Lander-to-Earth Data Link: Ka-band
f3 32GHz
wavelength:
λ3cf3
λ3 9.369 10 3 m
R 100Mbps Mbps
Rover-to-Lander Data Link: UHFR 8kbps kbps
Penetrator-to-LRO:
f4 36GHz
λ4cf4
λ3 9.369 10 3 m
R 100Mbps Mbps
IPT _Current as of May 8, 2023 76

Link Design for Ka-band Transmitter
Assumptions:Circular-parabolic reflector design based on Mars Exploration Rover (MER)
D 0.28m
Efficiency, η, is assumed to be 0.79 based on similar parabolic reflector designs
η 0.79
Antenna Gain(dB):
Frequency is assumed to be 32 GHz
Non-Dimensionalized for equation use
f32 109 Hz
1Hz D
D1m
pa 0.79
Line Loss
LL 10 decibels
Propagation Loss:
Lp 20logλ1
4π a
Lp 185.537 decibels
Total Loss:Lt Lp LL Lt 195.537 decibels
Peak Antenna Gain, Ga
Ga 10 log paπ 0.28 m
λ1
2
Ga 36.371
Half-power Beamwidth:
ϕ3dBλ3
0.28m pa ϕ3dB 2.157 deg
Half-power Beamwidth @ 50 km ( Lander to LRO):
BW1 2 50 km tan ϕ3dB BW1 3.766 km
IPT _Current as of May 8, 2023 77

****************************************************************************************************************************************************
Daedalus Antenna Program****************************************************************************************************************************************************
*****Input*****
function DaedalusAntenna pa = .79; % Antenna efficiencyd= .28; % Antenna diameter (m)l=.012; % Wavelength (m)Go=pa*(((pi*d)/l)^2) % Maximum Antenna Gainp=l/(d*sqrt(pa)) % 3dB or half-power beamwidth (radians)Gt=10*log10(Go) % Maximum Gain in dBP=-pi:.01:pi; % 180 degree range of angles G=Go.*exp(-2.76*(P/p).^2); % Antenna Gain across range of angles %orAntenna Pattern D=P*180/pi; % angle range converted to degreesGt0=10*log10(G); % Antenna Gain in dB vs. degrees plot(D,Gt0); % Plot of Antenna Patternxlim([-5 5]);ylim([0 45]);
*******Output*******
>> DaedalusAntenna
Go =
4.2450e+003
p =
0.0482
Gt =
36.2788
IPT _Current as of May 8, 2023 78

-5 -4 -3 -2 -1 0 1 2 3 4 50
5
10
15
20
25
30
35
40
45
Angle in Degrees
Gai
n in
dB
Antenna Gain vs. Angle off of Center
Figure 13: Daedalus Antenna Gain
IPT _Current as of May 8, 2023 79

Daedalus Communications Data Capability
Lander to LRO Data Transmission:
Tr1 100Mbit
sTrl 11.921
MBs
Data Transmission Amount from Daedalus to LRO every View-Time
Tr1 11.92 300 3576 MB
Data Transmission Amount from Daedalus to LRO every 24 hours
Tr1 357612 Tr1 42912 MB
Time Needed to Transmit 300MB of Data collected for the entire year
Time300
42912 Time 10min
LPES Communications Data Capability
LPES to LRO Data Transmission:
Tr2 2.4 10 4MB
sper Penetrator
Data Transmission Amount from Daedalus to LRO every View-Time per penetrator
Tr2 2.4 10 4 300 0.072 MB
Data Transmission Amount from LPES to LRO every 24 hours
Tr2 0.07212 Tr2 0.864MBday
Time Needed to Transmit 300MB of Data collected for the entire year
Time300
0.864 Time 347.222 day
IPT _Current as of May 8, 2023 80

LRO Data Transmission Volume to Earth
R 100Mbps
R3 42912.9 22 0.864 42931.91MBday
Total Data transmitted from Lander and Penetrators
T 0.162day
T 233.28min
Table 13: Daedalus UHF Communication Components
IPT _Current as of May 8, 2023 81

Figure 14-High Rate Transmitter
IPT _Current as of May 8, 2023 82

Figure 15: High Rate Transmitter
IPT _Current as of May 8, 2023 83

Figure 16: MER UHF System Specifications
IPT _Current as of May 8, 2023 84

Table 14: Mass and Power for Ka System
Ka-band System
Input Power Watts
RF Power Out Watts
Masskg Quantity
Total Mass
kg
Dimensionsin cm
Ka transmitter
47 max1.2 stand-
by2 2.3 1 2.3 20.3x16.8
x8.1
HGA 5 1.5 1 1.5 33x10x 10
HGAG 2 4.5 1 4.5 20x15x45
Tracking 1 1.0 1 1.0Controller 2 2.5 1 2.5 20x15x10
Coax 1 1.0 2 2.0
Table 15: Mass and Power for UHF System
UHF SystemInput Power Watts
RF Power Out Watts
Masskg Quantity
Total Mass
kg
Dimensionsin cm
Transceiver 6 rec.43 rec./tra 12 1.9 1 1.9 5.1x6.8x 3.7
Diplexer Included 0.4 1 0.4 2.9x3.7x 1.3
CTS Included 0.1 1 0.1 5.3x3.0x 4.0
RUHF Included 0.1 1 0.1 16.9x1.9 x1.9
DUHF Included 0.1 1 0.1 20x15x10Coax Included 0.6 1 0.6
Table 16: Total Mass and Power for Communications System
System PowerWatts
Masskg
Ka-band system 58/1.2 13.8UHF System 43/6 3.2System Total 64/44.2 17
IPT _Current as of May 8, 2023 85

IPT _Current as of May 8, 2023 86

IPT _Current as of May 8, 2023 87

Appendix J - Concept of Operations
Appendix K - Level II Requirements
1.0 Daedalus Power System
1.1. Power Storage (Batteries)
1.1.1. The Daedalus shall use all secondary rechargeable batteries.1.1.2. The Daedalus shall use 9 Lithium-Ion batteries, Sony 1860HC, each
with a specific energy of 114.627 W-hr/kg.1.1.3. The Daedalus batteries shall have a Depth of Discharge of 20% and an
Efficiency of 90%.1.1.4. The Daedalus batteries shall have 6 cells per battery string.1.1.5. The Daedalus batteries shall produce 5.6 W*hours per cell.1.1.6. The Daedalus batteries shall have 16 strings.1.1.7. The Daedalus batteries shall have 96 cells per battery.1.1.8. The Daedalus batteries shall have an individual length of 9.764-inches.1.1.9. The Daedalus batteries shall have an individual width of 7.362-inches.1.1.10. The Daedalus batteries shall have an individual height of 3.583-inches.1.1.11. The Daedalus batteries shall have a combined volume of 1.341 ft^3.1.1.12. The Daedalus batteries shall have an individual mass of 4.69 kg.1.1.13. The Daedalus batteries shall have a total mass of 42.21 kg.1.1.14. The Daedalus batteries shall have a cell capacity of 1.5 A*hours1.1.15. The Daedalus batteries shall have a total cell energy of 144 A*hours.
1.2. Power Generation (Solar Cells)
1.2.1. The Daedalus shall use 3 solar cells derived from the Venus Express Spacecraft made of Gallium Arsenide. The solar cells shall be comprised of 2 identical sized solar panels and 1 smaller solar panel.
1.2.2. The Daedalus solar cells shall have 2.75% degradation per year.1.2.3. The Daedalus solar cells 2 identical panels shall have a length of 1.778
m.1.2.4. The Daedalus solar cells 2 identical panels shall have a width of 0.8 m.1.2.5. The Daedalus solar cells 2 identical panels shall have a mass of 20.25
kg each.1.2.6. The Daedalus solar cells 2 identical panels shall produce a maximum
of 410W each.1.2.7. The Daedalus solar cells 2 identical panels shall have a surface area of
2.822 m^2 each.1.2.8. The Daedalus solar cells 3rd and smallest panel shall have a length
of .508 m.1.2.9. The Daedalus solar cells 3rd and smallest panel shall have a width of
0.229 m.
IPT _Current as of May 8, 2023 88

1.2.10. The Daedalus solar cells 3rd and smallest panel shall have a mass of 5.786 kg.
1.2.11. The Daedalus solar cells 3rd and smallest panel shall have a surface area of 0.4 m^2.
1.2.12. The Daedalus solar cells 3rd and smallest panel shall produce a maximum of 117.143 Watts.
1.2.13. The Daedalus solar cells shall produce a total 937.143W of electrical power.
1.2.14. The Daedulus solar cells shall have a combined mass of 46.286kg.1.2.15. The Daedalus solar cells shall have a total surface area of 6.161 m^2.
1.3 Power Control (Power Control Unit/Power Regulation and Control)
1.3.1 The Daedalus PCU shall have 2 Auxiliary Power Regulators per Solar Cell.
1.3.2 The Daedalus PCU shall have 1 Battery Charge/Discharge Regulator per Battery.
1.3.3 The Daedalus PCU shall use a STMicroelectronix ST0F269 digital signal processor and/or Microprocessor.
1.3.4 The Daedalus PCU shall use Crydom CMX60D10 Solid State Relays.1.3.5 The Daedalus PCU shall use ON Semiconductor LM350 positive
voltage regulators. 1.3.6 The Daedalus PCU shall require 27.333 Amps and 1.207 Ohms of
resistance.1.3.7 The Daedalus PCU shall have a total mass of 38.95kg.1.3.8 The Daedalus PCU shall have a total volume of 2.207 ft^3.1.3.9 The Daedalus wiring shall have a total mass of 9.5 kg.
1.4 Power System Duty Cycles
1.4.1 The Daedalus shall be able to operate for 14 days of total darkness.1.4.2 The Daedalus shall make use of system duty cycles to limit the time
and power.1.4.3 The Daedalus shall make use of 3 individual power systems.
1.4.3.1 The first power system shall operate for the entire dark period and provide constant priming power for the PCU.
1.4.3.2 The second power system shall operate only 10% of the time, consisting of the Power System and the Thermal System.
1.4.3.3 The third power system shall operate only 1.25% of the time to take data and communicate with Earth.
1.4.4 The Daedalus shall operate during the dark period for a total of 8530 W*hours.
IPT _Current as of May 8, 2023 89

2.0 Daedalus Thermal Control Subsystem
2.1 Components
2.1.1 The Daedalus thermal control subsystem shall make use a multi-layered insulation blanket consisting of fifteen layers.
2.1.2 The Daedalus insulation blanket shall have an external material of standard beta cloth.
2.1.3 The Daedalus insulation blanket shall have an internal material of aluminized Kapton with a thickness of three to five mils.
2.1.4 The Daedalus insulation blanket shall have a separator material of Dacron mesh netting with a thickness of 0.16mm.
2.1.5 The Daedalus insulation blanket shall have an interior material of Kapton laminate with a thickness of 0.5mils.
2.1.6 The Daedalus insulation blanket shall have provisions designed for venting.
2.1.7 The Daedalus shall have a radiator that is mounted on the top of the vehicle on the exterior.
2.1.8 The Daedalus radiator shall have a minimum surface area of 0.57 meters squared.
2.1.9 The Daedalus radiator will have a coating of high emissivity, white paint.
2.1.10 The Daedalus shall utilize a high thermal conductivity mounting plate constructed of aluminum.
2.1.11 The Daedalus mounting plate shall have a length and width of 2.0 meters.
2.1.12 The Daedalus mounting plate shall have a thickness of 0.25 inches.2.1.13 The Daedalus shall have paraffin diaphragm thin plate heat switches
located between the lithium-ion batteries and the mounting plate.2.1.14 The Daedalus shall have electrical resistance heaters inside the
thermally controlled compartment of the vehicle.2.1.15 The Daedalus electrical resistance heaters shall be controlled by a
steady-state controller.2.1.16 The Daedalus electrical resistance heaters shall have redundant steady-
state controllers that will control the heater in the event of a controller failure.
2.1.17 The Daedalus shall have variable conductance heat pipes embedded into the radiator panel.
2.1.18 The Daedalus shall have heat pipes that connect the variable radioisotope heater units to the external radiator.
2.1.19 The Daedalus shall have heat pipes that are constructed of aluminum pipes with a diameter of 1.27centimeters.
2.1.20 The Daedalus heat pipes shall have a working fluid of ammonia.2.1.21 The Daedalus heat pipes shall have an axial groove composite wick
construction with a single wrap of small-pore screen.2.1.22 The Daedalus shall have fifty radioisotope heater units (RHUs).
IPT _Current as of May 8, 2023 90

2.1.23. The Daedalus RHUs will be located inside ten variable RHU containers.
2.1.24. The Daedalus RHU containers will provide an insulating thermal blanket that will shield the RHU heat from reaching components when they are at an appropriate temperature.
2.1.25. The Daedalus variable RHU containers shall contain five RHUs.
2.1 System Integration
2.2.1. The Daedalus thermal control subsystem shall sustain an operating temperature range of -10 degrees Celsius to 40 degrees Celsius inside the thermally controlled environment on the interior of spacecraft.
2.2.2. The Daedalus thermal control subsystem should not exceed a maximum of 151 watts to function properly during full operation.
2.2.3. The Daedalus thermal control subsystem in its entirety should not exceed a maximum of 40 kg.
2.2.4. The Daedalus thermal control subsystem must be designed to ensure that there are redundant components and controllers in the event of a failure.
3.0 Daedalus Communications System
3.1 Ka-Band System
3.1.1 The Daedalus shall utilize the Mars Exploration Rover Ka-band system design
3.1.2 The Daedalus shall be capable of transmitting 100 Mbps of data to LRO.
3.1.3 The Daedalus Ka-band system shall transmit on a 26 GHz frequency.
3.1.4 The Daedalus shall have a high gain antenna based on the Mars Exploration Rovers to transmit data.
3.1.5 The Daedalus shall have a high gain antenna with an overall diameter of 0.28 meters.
3.1.6 The Daedalus shall have a high gain antenna with a peak gain of 36.4 decibels.
3.1.7 The Daedalus high gain antenna shall have a gimbal system and shall be capable of tracking LRO.
3.1.8 The Daedalus high gain antenna is a Ball Aerospace High Gain Antenna Gimbal system.
3.1.9 The Daedalus shall use a General Dynamics HRT 150 High Rate Transmitter for Ka-band transmissions
3.1.10 The Daedalus Ka-band system shall not exceed 58 Watts of power for transmission
3.1.11 The Daedalus Ka-band system shall not exceed a mass of 13.8 kg.
IPT _Current as of May 8, 2023 91

3.2 UHF System
3.2.1 The Daedalus UHF system shall utilize the Mars Exploration Rover UHF communications system
3.2.2 The Daedalus shall be capable of receiving 8 Kbps from mission control using LRO.
3.2.3 The Daedalus UHF system shall transmit on a 437.1 MHz frequency
3.2.4 The Daedalus UHF system shall receive data on a 401.53 MHz frequency
3.2.5 The Daedalus shall be capable of transmitting through the UHF system in case of Ka-band system failure.
3.2.6 The Daedalus UHF system shall utilize the low gain antenna based on the Mars Exploration Rover design
3.2.7 The Daedalus UHF system shall not exceed 43 Watts of power for transmission
3.2.8 The Daedalus UHF system shall not exceed a mass of 3.2 kg.
3.3 Lunar Penetrator Exploration System Communication3.3.1 The Daedalus LPES system shall transmit data to LRO using a
UHF system.3.3.2 The Daedalus LPES system shall be capable of transmitting data at
2 kbps.3.3.3 The Daedalus LPES system shall transmit on a frequency of 32
Mhz.
3.4 Data Handling
3.4.1 The Daedalus computer and data handling system shall be based on the Mars Exploration Rover design
3.4.2 The Daedalus shall use redundant BAE Systems RAD6000 Flight Computers
IPT _Current as of May 8, 2023 92

References:
On Mars Exploration of the Red Planet 1958-1978, Edward Clinton Ezell and Linda Neuman Ezell, published 1984 by the Scientific and Technical Information Branch of the National Aeronautics and Space Administration, page 218
Brown, C. 2002. Elements of Spacecraft Design. Reston, Virginia: AIAA. Ch. 7 and 10.
Gilmore, D. G. Ed. 2002. Spacecraft Thermal Control Handbook. 2nd Edition volume 1. El Segundo: The Aerospace Press.
Eckart, P., “The Lunar Base Handbook,” An Introduction to Lunar Base Design, Development, and Operations, McGraw-Hill, St Louis, 1999,Chpt 14.
Wertz, J., Space Mission Analysis and Design. Hawthorne, California: Space Technology Library.
“Heat Pipes”, Genium Publishing, 1991, pages 1-30
Committee on Advance Space Based High Power Technologies, Energy Engineering Board, Commission on Engineering and Technical Systems National Research Council, “Power Options and Selection Constraints,” Advanced Power Sources for Space Missions, Nat. Academy Press, Washington, D.C., 1989, pp. 9-51.
Hyder, A.K., Wiley, R.L., Halpert, G., Flood, D.J., Sabripour, S., “Chemical Storage and Generation Systems,” Spacecraft Power Technologies, 1st ed., Vol. 1, Imperial College Press, London, 2000, pp. 157-239.
AIAA Book Series: Brown, C.,Elements of Spacecraft Design, edited by H. F. Nelson, Vol. 96, Progress in Astronautics and Aeronautics, AIAA, New York, 1985,
On Mars Exploration of the Red Planet 1958-1978, Edward Clinton Ezell and Linda Neuman Ezell, published 1984 by the Scientific and Technical Information Branch of the National Aeronautics and Space Administration, page 218
5) Ingoldby, R. N., "Guidance and Control System Design of the Viking Planetary Lander," AIAA Journal, Vol. 1, No. 3, May-June 1978, pp. 189-196.
6) J. N. Head, G. V. Hoppa, T.G. Gardner, K. S. Seybold, and T. Svitek, "Autonomous Low Cost Precision Lander for Lunar Exploration," Lunar and Planetary Science XXXVI., p1471, San Luis Obispo, CA, 2005.
IPT _Current as of May 8, 2023 93

7) R. Frampton, J Ball, K. Oittinen, M. Bishun, B. Richards, and J. Tripp, “Precision Landing and Hazard Avoidance Technology Demonstration Program,” Albuquerque, NM, February, 2006.
8) Gilmore, D. G., “Spacecraft Thermal Control Handbook,” Volume 1: Fundamental Technologies, 2nd ed., El Segundo, California, 2002, pp. 139-241
9) Wertz, J. R., and Wiley, J. L., “Space Mission Analysis and Design,” 3rd ed., Microcosm Press, Hawthorne, CA, and Springer, New York, NY, 1999, pp. 428-459
10) Morey, T. F., and Gorman, D. N., “Development of the Viking Mars Lander Thermal Control Subsystem Design,” Martin Marietta Aerospace, Denver Colorado, Vol. 13, No. 4, April 1976
11) Eller, H., Lo, A., and Dailey, D., “A Concept for a Highly Extensible Lunar Lander: A “Lunar Pickup” Lander,” AIAA Paper 2006-7446, Sep. 2006
IPT _Current as of May 8, 2023 94













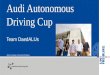


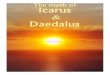


![SafeChania Daedalus [Poster]](https://img.pdfslide.net/doc/110x75/55d255abbb61eb9d638b45d9/safechania-daedalus-poster.jpg)






